Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів
Номер патенту: 56086
Опубліковано: 15.04.2003
Автори: Медвідь Володимир Станіславович, Богомол Володимир Іванович, Хитрик Василь Онуфрійович
Формула / Реферат
1. Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів, що містить дві платформи, зв'язані між собою за допомогою не менше ніж двох виконавчих гідроциліндрів та двох демпферів, одна з яких виконана рухомою,а друга -нерухомою, та кабіну транспортного засобу з розташованими у ній імітаторами приладової дошки, важелями керування, перископічними приладами спостереження, динаміком, люком і робочим місцем навчаного, при цьому кабіна встановлена на рухомій платформі і зв'язана з системою керування та датчиком кутів нахилу кабіни, а гідроциліндри включені до гідравлічної системи, яка містить блок керування, гідронасос і поновлювальні баки, який відрізняється тим, що він додатково містить рухомий підвісний карданний вузол, додаткові демпфери подовжнього каналу та поперечного каналу, опору і систему керування імітатором динаміки кабіни, гідравлічна система додатково містить електрогідропривід та гідропідсилювач, нерухома платформа обладнана гумовою прокладкою, напрямною для повзунів та регулюючими гвинтами, кожний з яких з'єднаний з повзуном, до складу електрогідропривода входять гідронасоси з вбудованими усередині блоками регулювання та електромагнітами, до складу системи керування входять зв'язані між собою датчики органів керування, контролер, пульт інструктора, плати ключів, пристрій зв'язку, перший і другий комп'ютери, блок керування, блок зв'язку, модуль керування електрогідроприводом, блок звукової інформації, дисплей, пристрій ведення протоколу і пристрій візуалізації, до складу пристрою візуалізації входять мультимедійний широкоформатний проектор та широкий екран, при цьому перший комп'ютер і другий комп'ютер системи керування об'єднані у обчислювальний пристрій, а контролер, плата ключів і модуль керування електрогідроприводами об'єднані в погоджувальний пристрій.
2. Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів за п. 1, який відрізняється тим, що додаткові демпфери встановлені у двох каналах керування для сприйняття навантажень та гасіння коливань кабіни у подовжньому та вертикальному напрямку, при цьому у кожному каналі керування встановлені не менше ніж два демпфери.
3. Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів за п. 1, який відрізняється тим, що виконавчі гідроциліндри електрогідропривода закріплені до нижньої нерухомої платформи за допомогою нерухомих вилок, а до верхньої рухомої платформи - за допомогою поворотних вилок через штоки.
4. Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів за п. 1, який відрізняється тим, що подовжній демпфер містить телескопічний шток з розміщеними на кожному з його кінців кульовими пальцями і пружину, закріплену у двох стаканах через прокладку.
5. Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів за пп. 1,4, який відрізняється тим, що демпфер подовжнього каналу закріплений до верхньої рухомої платформи нерухомо за допомогою кульових пальців, а до нижньої нерухомої платформи - рухомо за допомогою кульових пальців, при цьому кульові пальці закріплені до повзунів.
6. Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів за п. 1, який відрізняється тим, що демпфер поперечного каналу містить пружину, систему блоків, трос і регулюючий гвинт.
7. Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів за п. 1, який відрізняється тим, що вихід плати ключів погоджувального пристрою з'єднаний з одним із входів модуля керування електрогідроприводами.
Текст
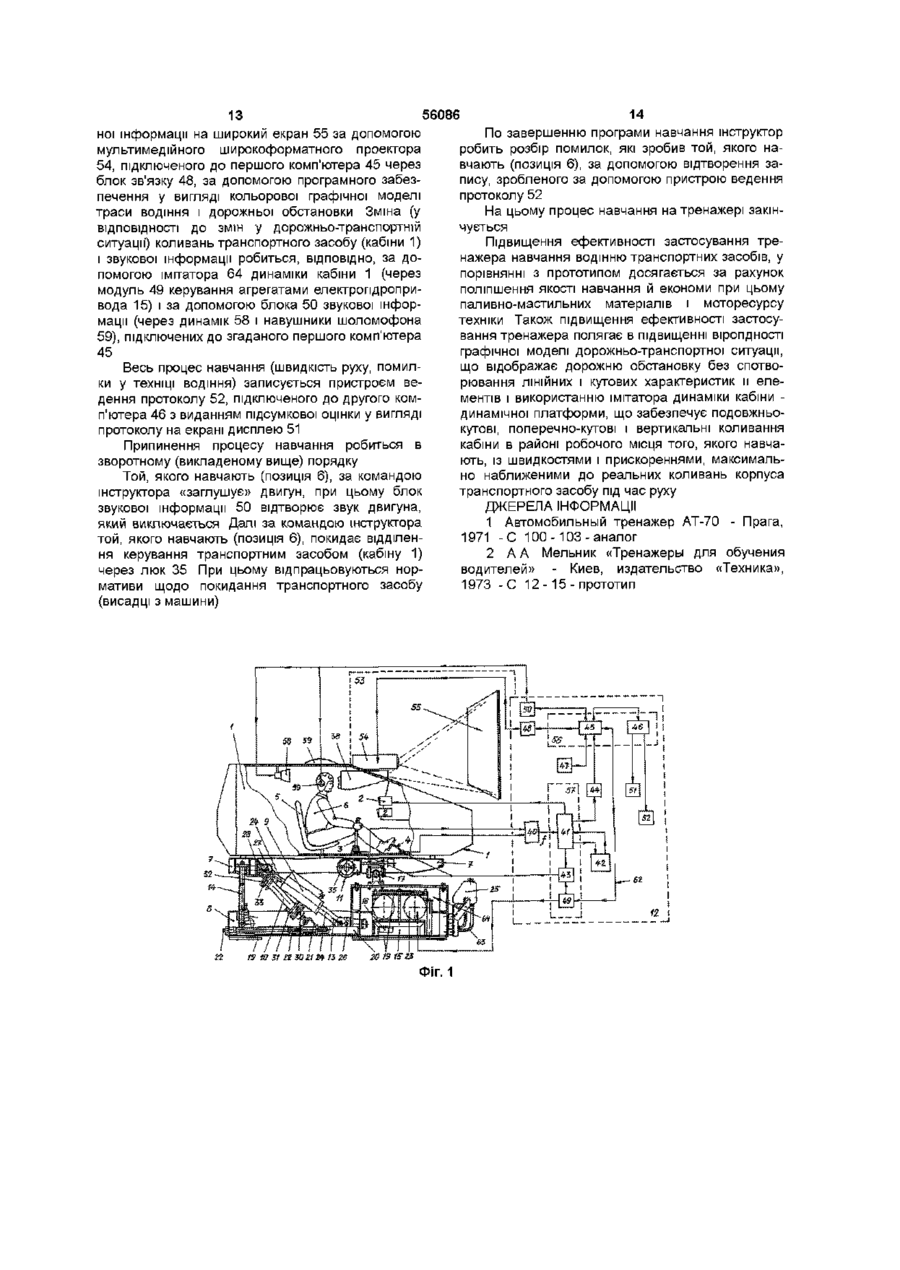
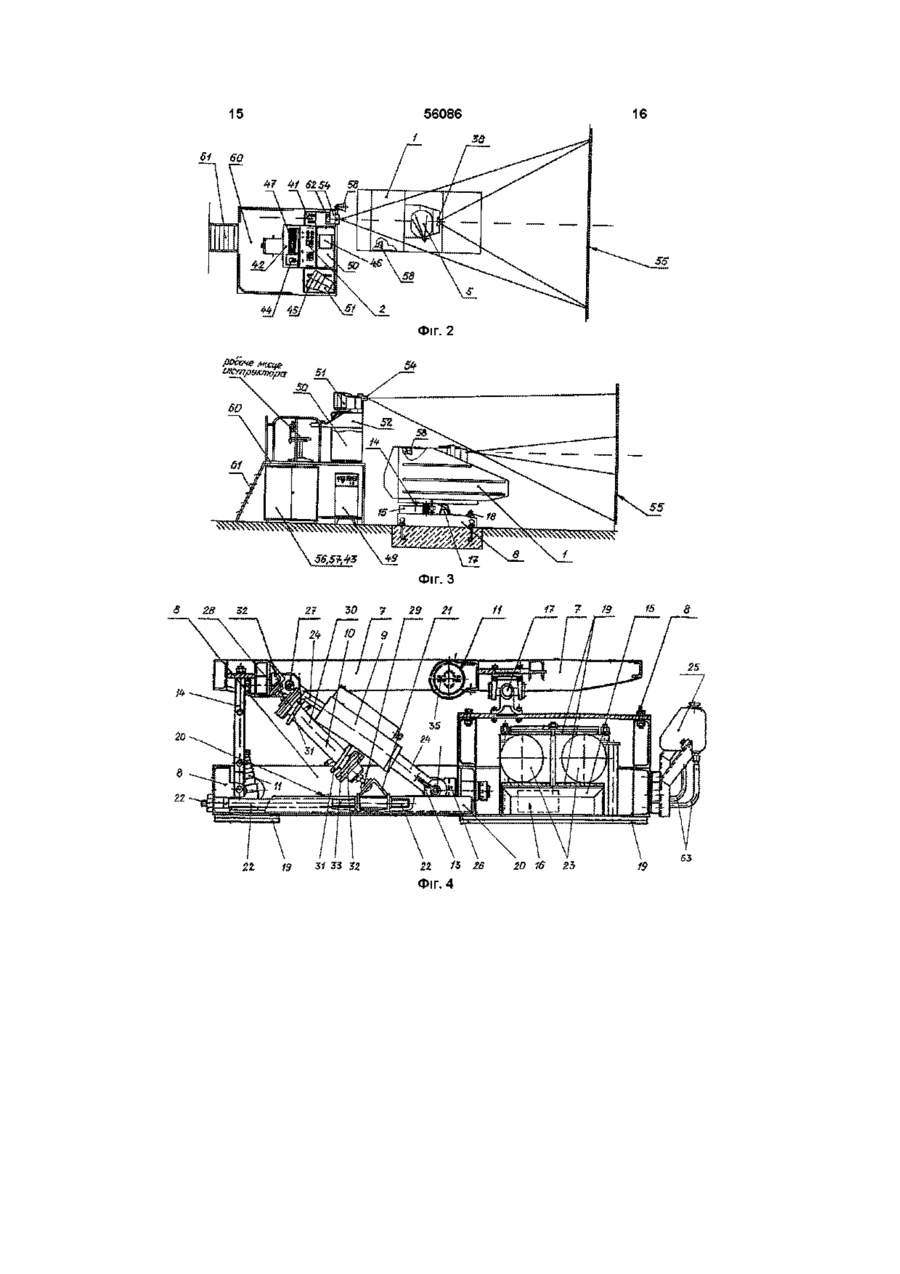
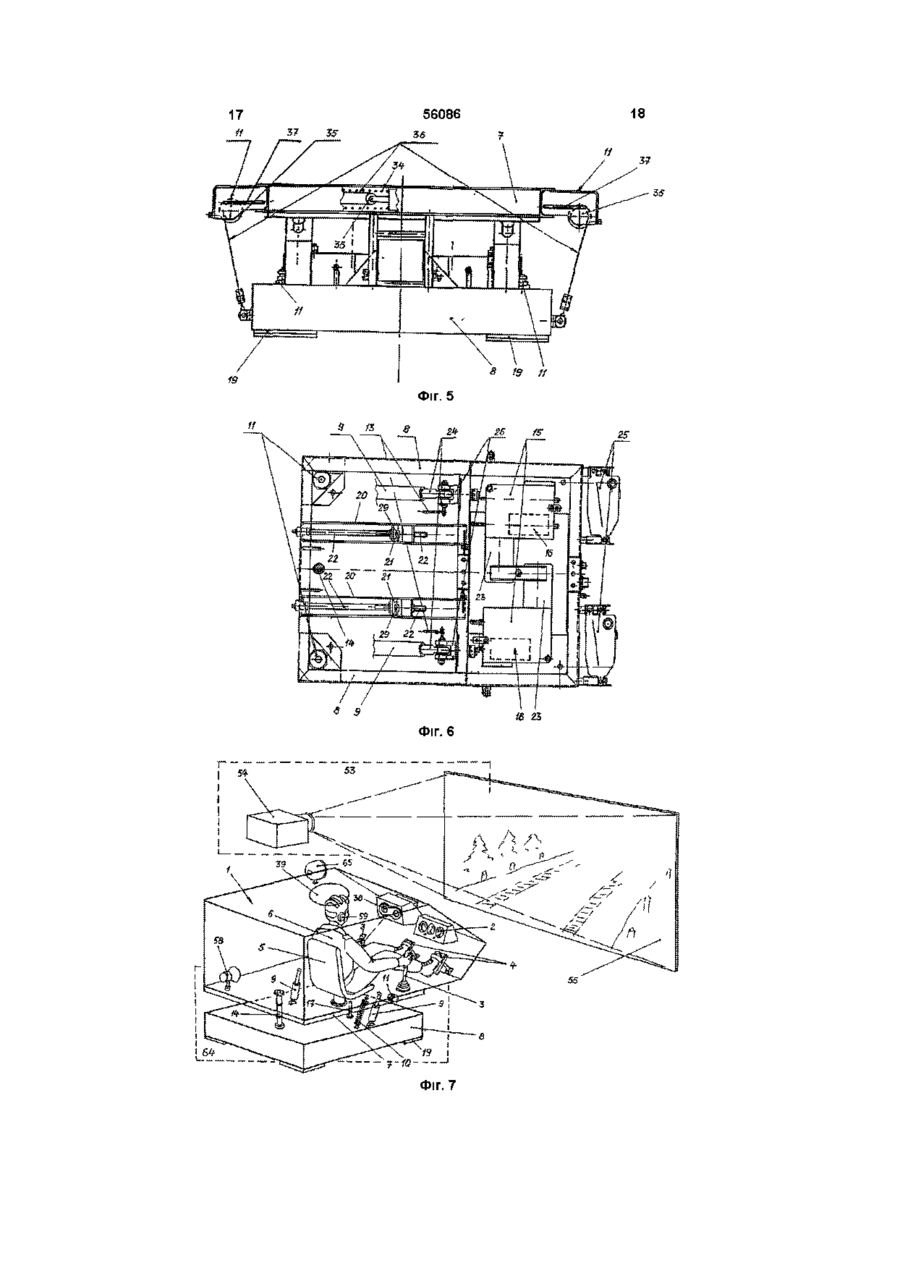
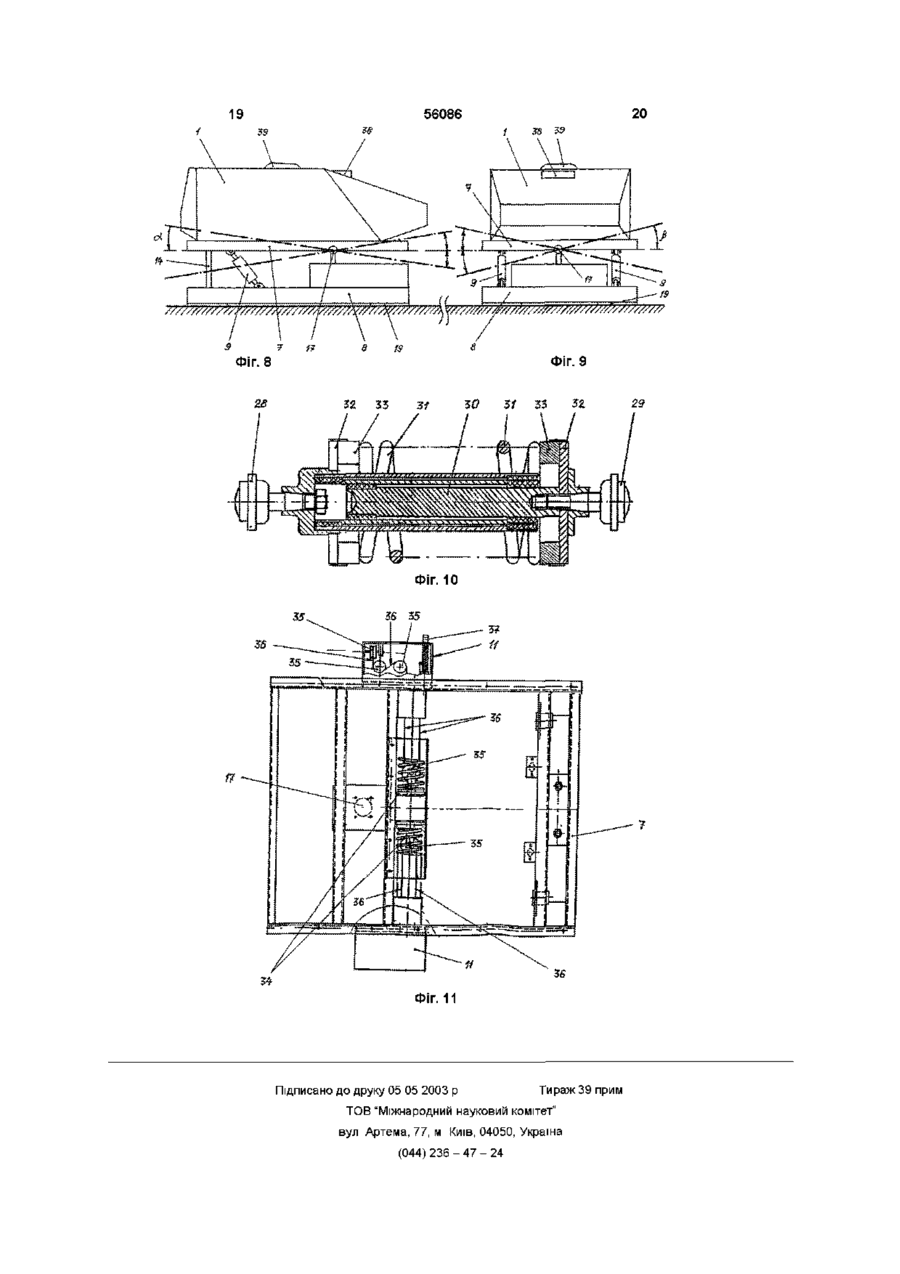
1 Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів, що містить дві платформи, зв'язані між собою за допомогою не менше ніж двох виконавчих гідроциліндрів та двох демпферів, одна з яких виконана рухомою, а друга -нерухомою, та кабіну транспортного засобу з розташованими у ній імітаторами приладової дошки, важелями керування, перископічними приладами спостереження, динаміком, люком і робочим місцем навчаного, при цьому кабіна встановлена на рухомій платформі і зв'язана з системою керування та датчиком кутів нахилу кабіни, а гідроциліндри включені до гідравлічної системи, яка містить блок керування, гідронасос і поновлювальні баки, який відрізняється тим, що він додатково містить рухомий ПІДВІСНИЙ карданний вузол, додаткові демпфери подовжнього каналу та поперечного каналу, опору і систему керування імітатором динаміки кабіни, гідравлічна система додатково містить електропдропривід та пдропідсилювач, нерухома платформа обладнана гумовою прокладкою, напрямною для повзунів та регулюючими гвинтами, кожний з яких з'єднаний з повзуном, до складу електропдропривода входять гідронасоси з вбудованими усередині блоками регулювання та електромагнітами, до складу системи керування входять зв'язані між собою датчики органів керування, контролер, пульт інструктора, плати ключів, пристрій зв'язку, перший і другий комп'ютери, блок керування, блок зв'язку, модуль керування електропдроприводом, блок звукової інформації, дисплей, пристрій ведення протоколу і пристрій візуалізацм, до складу пристрою візуалізацм входять мультимедійний широкоформатний проектор та широкий екран, при цьому перший комп ютер і другий комп ютер системи керування об'єднані у обчислювальний пристрій, а контролер, плата ключів і модуль керування електропдроприводами об'єднані в погоджувальний пристрій 2 Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів за п 1, який відрізняється тим, що додаткові демпфери встановлені у двох каналах керування для сприйняття навантажень та гасіння коливань кабіни у подовжньому та вертикальному напрямку, при цьому у кожному каналі керування встановлені не менше ніж два демпфери 3 Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів за п 1, який відрізняється тим, що виконавчі гідроциліндри електропдропривода закріплені до нижньої нерухомої платформи за допомогою нерухомих вилок, а до верхньої рухомої платформи - за допомогою поворотних вилок через штоки 4 Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів за п 1, який відрізняється тим, що подовжній демпфер містить телескопічний шток з розміщеними на кожному з його КІНЦІВ кульовими пальцями і пружину, закріплену у двох стаканах через прокладку 5 Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів за пп 1,4, який відрізняється тим, що демпфер подовжнього каналу закріплений до верхньої рухомої платформи нерухомо за допомогою кульових пальців, а до нижньої нерухомої платформи - рухомо за допомогою кульових пальців, при цьому кульові пальці закріплені до повзунів 6 Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів за п 1, який відрізняється тим, що демпфер поперечного каналу містить пружину, систему блоків, трос і регулюючий гвинт 7 Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів за п 1, який відрізняється тим, що вихід плати ключів погоджувального пристрою з'єднаний з одним із входів модуля керування електропдроприводами (О 00 о (О ю 56086 Винахід відноситься до галузі навчання, зокрема, до засобів для навчання водив водінню транспортних засобів, наприклад, гусеничної техніки, а саме, до тренажерів, які оснащено імітаторами динаміки кабіни Тренажери призначені для формування і підтримки навичок водив транспортних засобів, наприклад, механіків-водпв у керуванні танком, бойовими машинами десанту або піхоти, іншими гусеничними транспортними засобами в різних дорожніх умовах у стаціонарних умовах навчальних підрозділах або вищих навчальних закладах Імітатори динаміки кабіни тренажерів навчання водінню транспортних засобів входять складовою частиною до зазначених тренажерів і призначені для імітації (при роботі в комплексі з системами керування тренажерами) коливань корпуса вищезазначених транспортних засобів в процесі навчання водінню для створення реальних умов водіння Відомий імітатор динаміки кабіни тренажера навчання водінню транспортних засобів, який містить безпосередньо пристрій моделювання коливань кабіни, макет кабіни транспортного засобу з органами керування, встановлений на зазначеному пристрою, модель двигуна згаданого транспортного засобу, тіньовий проектор, екран і пульт інструктора [1] Недоліками імітатора динаміки кабіни тренажера для навчання водив транспортних засобів є однотипність і монотонність запропонованої дорожньої ситуації, велика трудність у ЗМІНІ І різноманітності дорожніх ландшафтів, складність механічних вузлів тренажера, дорожня ситуація, що зображується на екрані тренажера, змінюється поза залежністю від керуючих впливів того, якого навчають, на важелі керування, практично відсутній вплив викладача/інструктора на зміну дорожньої ситуації, відсутність пристроїв імітації реальних коливань корпуса транспортного засобу при імітації рухи Найбільш близьким технічним рішенням, обраним за прототип, є імітатор динаміки кабіни тренажера навчання водінню транспортних засобів, який містить безпосередньо дві платформи, що зв'язані між собою за допойогою не менше ніж двох виконавчих гідроциліндрів та двох демпферів, одна з яких виконана рухомою, а друга - нерухомою, та кабіну транспортного засобу з розташованими у ній імітаторами приладової дошки, важелями керування, перископічними приладами спостереження, динаміком, люком і робочим місцем того, якого навчають, при цьому кабіна виконана встановленою на рухомій платформі і додатково зв'язана з системою керування та датчиком кутів нахилу зазначеної кабіни, а гідроциліндри включені до гідравлічної системи, яка містить блок керування, гідронасос і поновлювальні баки [2] До недоліків імітатора динаміки кабіни тренажера навчання водінню транспортних засобів, який обрано за прототип, відноситься те, що іміта тор відтворює тільки подовжньо-кутові коливання кабіни Також до недоліків імітатора динаміки кабіни відноситься однотипність і монотонність запропонованої дорожньої ситуації, велика трудність у ЗМІНІ І різноманітності дорожніх ландшафтів, спотворювання при цьому ЛІНІЙНИХ і кутових характеристик елементів дорожньої обстановки в прийнятій системі візуалізацп, практично відсутній вплив викладача/інструктора на зміну дорожньої ситуації, відсутність пристроїв імітації реальних коливань корпуса транспортного засобу при імітації руху В основу винаходу поставлена задача шляхом усунення недоліків прототипу забезпечити умови навчання, які максимально наближені до реальних Суть винаходу в імітаторі динаміки кабіни тренажера навчання водінню транспортних засобів, який містить безпосередньо дві платформи, що зв'язані між собою за допомогою не менше ніж двох виконавчих гідроциліндрів та двох демпферів, одна з яких виконана рухомою, а друга нерухомою, та кабіну транспортного засобу з розташованими у ній імітаторами приладової дошки, важелями керування, перископічними приладами спостереження, динаміком, люком і робочим місцем того, якого навчають, при цьому кабіна виконана встановленою на рухомій платформі і додатково зв'язана з системою керування та датчиком кутів нахилу зазначеної кабіни, а гідроциліндри включені до гідравлічної системи, яка містить блок керування, гідронасос і поновлювальні баки, полягає втому, що він додатково обладнаний рухомим ПІДВІСНИМ карданним вузлом, додатковими демпферами подовжнього каналу та поперечного каналу, опорою і системою керування зазначеним імітатором динаміки кабіни, гідравлічна система додатково споряджена електропдроприводом та гідро підсилювачем, нерухома платформа обладнана гумовою прокладкою, напрямними для повзунів та регулювальними гвинтами, кожний з яких виконано з'єднаним з зазначеним повзуном, до складу електропдропривода входять гідронасоси з вбудованими усередині блоками регулювання га електромагнітами, до складу системи керування входять зв'язані між собою датчики органів керування, контролер, пульт інструктора, плати ключів, пристрій зв'язку, перший і другий комп'ютери, блок керування, блок зв'язку, модуль керування елекіропдроприводом, блок звукової інформації, дисплей, пристрій ведення протоколу і пристрій візуалізацп, до складу зазначеного пристрою візуалізацп входять мультимедійний широкоформатний проектор та широкий екран, при цьому перший комп'ютер і другий комп'ютер системи керування об'єднані у обчислювальний пристрій, а контролер, плата ключів і модуль керування електропдроприводами об'єднані в погоджувальний пристрій Суть винаходу полягає і втому, що додаткові демпфери встановлено у двох каналах керування для сприйняття навантажень та гасіння коливань кабіни у подовжньому та вертикальному напряму, у кожно 56086 ПІДВІСНИМ карданним вузлом, додатковими демпферами подовжнього каналу та поперечного каналу, опорою і системою керування зазначеним імітатором динаміки кабіни, гідравлічна система додатково споряджена електропдроприводом та пдропідсилювачем, нерухома платформа обладнана гумовою прокладкою, напрямними для повзунів та регулювальними гвинтами, кожний з яких виконано з'єднаним з зазначеним повзуном, до складу електропдропривода входять гідронасоси з вбудованим» усередині блоками регулювання та електромагнітами, до складу системи керування входять зв'язані між собою датчики органів керування, контролер, пульт інструктора, плати ключів, пристрій зв'язку, перший і другий комп'ютери, блок керування, блок зв'язку, модуль керування електропдроприводом, блок звукової інформації, дисплей, пристрій ведення протоколу і пристрій візуалізацм, до складу зазначеного пристрою візуалізацм входять мультимедійний широкоформатний проектор та широкий екран, при цьому перший комп'ютер і другий комп'ютер системи керування об'єдДосягнення суті винаходу дійсно можливо, тонані у обчислювальний пристрій, контролер, плата му що конструктивно можливо виготовити робоче ключів і модуль керування електропдроприводами місце того, якого навчають, а саме, кабіну трансоб'єднані в погоджувальний пристрій, додаткові портного засобу такою, що імітує відділення керудемпфери встановлено у двох каналах керування вання транспортного засобу, наприклад, відділендля сприйняття навантажень та гасіння коливань ня керування танка 1-12, в об'ємі, що необхідний кабіни у подовжньому та вертикальному напряму, для навчання водінню того або іншого транспорту кожному каналі керування встановлено не менного засобу (ВІДПОВІДНО ДО програми навчання) У ше ніж два демпфери, виконавчі гідроциліндри кабіні конструктивно розташовуються важелі керуелектропдроприводу виконано закріпленими до вання транспортним засобом і педалі, імітатори нижньої нерухомої платформи за допомогою неприладової дошки і засоби візуального спостерерухомих вилок, а до верхньої рухомої платформи ження за зовнішньою обстановкою (прилади споза допомогою поворотних вилок через штоки, постереження) Кабіну також конструктивно можливо довжній демпфер містить телескопічний шток з виконати такої форми і розташувати на такій висорозміщеним на кожному з його КІНЦІВ шаровим ті, щоб забезпечити тому, якого навчають, відпрапальцем, і пружину, закріплену у двох стаканах цьовування навичок по посадці і покиданню віддічерез прокладку, демпфер подовжнього каналу лення керування транспортного засобу закріплюється до верхньої рухомої платформи Конструктивно і технологічно кабіну (з робочим нерухомо за допомогою шарових пальців, а до місцем того, якого навчають), можливо установити нижньої нерухомої платформи - рухомо за допона імітаторі динаміки згаданої кабіни Імітатор димогою шарових пальців, зазначені шарові пальці наміки кабіни конструктивно можливо виконати у закріплюються до повзунів, демпфер поперечного вигляді динамічної платформи, що робить поканалу містить пружину, систему блоків, трос і редовжньо-кутові і поперечні коливання зі швидкогулювальний гвинт, причому вихід плати ключів стями і прискореннями, що наближені до реальних погоджувального пристрою виконаний з'єднаним з коливань корпуса транспортного засобу, наприодним із входів модуля керування електропдропклад, танка, під час руху останнього При цьому риводами конструктивно імітатор динаміки кабіни можна му каналі керування встановлено не менше ніж два демпфери, виконавчі гідроциліндри електропдроприводу закріплено до нижньої нерухомої платформи за допомогою нерухомих вилок, а до верхньої рухомої платформи - за допомогою поворотних вилок через штоки Суть винаходу полягає також і в тому, що демпфер подовжнього каналу виконано таким, що містить телескопічний шток з розміщеним на кожному з його КІНЦІВ шаровим пальцем, і пружину, закріплену у двох стаканах через прокладку, демпфер подовжнього каналу закріплюється до верхньої рухомої платформи нерухомо за допомогою шарових пальців, а до нижньої нерухомої платформи - рухомо за допомогою шарових пальців, зазначені шарові пальці закріплюються до повзунів, демпфер поперечного каналу виконано таким, що містить пружину, систему блоків, трос і регулювальний гвинт, а вихід плати ключів погоджувального пристрою виконаний з'єднаним з одним із входів модуля керування електропдроприводами оснастити рухомим ПІДВІСНИМ карданним вузлом, не менше, ніж двома електропдроприводами, системами керування згаданими пдроприводами та іншими агрегатами, які забезпечують функціонування імітатора динаміки кабіни, наприклад, комп'ютерами, пристроями візуалізацм дорожньої обстановки та іншими При цьому за допомогою комп'ютерів можливо забезпечити зміну і різноманітність ландшафту, освітленості траси (імітація водіння в різний час доби), погодних умов, імітацію закабінних шумів (звуки бою, розриви снарядів, удари бойових вражаючих елементів по корпусу транспортного засобу) і інше Порівняльний аналіз технічного рішення, яке заявляється, із прототипом, показує, що імітатор динаміки кабіни тренажера навчання водінню транспортних засобів, який заявляється, відрізняється тим, що він додатково обладнаний рухомим Таким чином, імітатор динаміки кабіни тренажера навчання водінню транспортних засобів, який заявляється, відповідає критерію винаходу «новизна» Суть винаходу пояснюється за допомогою ілюстрацій, де на фіг 1 наведена блок-схема імітатора динаміки кабіни тренажера навчання водінню транспортних засобів, на фіг 2 показаний загальний вигляд імітатора динаміки кабіни тренажера на виді зверху, на фіг 3 показаний загальний вигляд імітатора динаміки кабіни тренажера на виді збоку, на фіг 4 - 6 наведена конструктивнокомпонувальна схема імітатора динаміки кабіни, ВІДПОВІДНО, на виді збоку, спереду та зверху, на фіг 7 показана схема розміщення кабіни транспортного засобу на рухомій платформі імітатора динаміки кабіни тренажера навчання водінню транспортних засобів, який заявляється, на фіг 8 надана 56086 схема подовжніх коливань рухомої платформи з розміщеною на ній кабіною, на фіг 9 надана схема поперечних коливань рухомої платформи з розміщеною на ній кабіною, на фіг 10 надана схема демпфера подовжнього каналу, на фіг 11 надана схема демпфера поперечного каналу Імітатор динаміки кабіни тренажера навчання водінню транспортних засобів містить (див фіг1) безпосередньо кабіну 1 транспортного засобу з розташованими у ній імітаторами приладової дошки 2, пристроями керування, ВІДПОВІДНО, важелями керування 3 і педалями 4, та робочим місцем 5 того, якого навчають 6 Імітатор динаміки кабіни тренажера навчання водінню транспортних засобів також містить дві платформи 7 і 8, які зв'язані між собою за допомогою не менше ніж двох виконавчих гідроциліндрів 9 та демпферів 10 і 11 Демпфери 10 встановлені в подовжньому каналі, а демпфери 11 встановлені в поперечному каналі імітатора динаміки кабіни При цьому платформа 7 виконана рухомою, а платформа 8 - нерухомою Конструктивно зазначена кабіна 1 виконана встановленою на верхній рухомій платформі 7 і додатково зв'язана з системою керування 12 та датчиками 13 кутів нахилу кабіни 1 Зазначені датчики 13 нахилу кабіни 1 (датчики ЛІНІЙНИХ переміщень), що призначені для вироблення і видачі в систему керування 12 коливаннями кабіни 1 сигналів, конструктивно встановлюються між верхньою 7 і нижньою 8 платформами паралельно виконавчим гідроциліндрам 9 і розміщуються на осях кожної з поворотних вилок 26 Датчики 13 нахилу кабіни 1 (датчики ЛІНІЙНИХ переміщень) конструктивно являють собою потенціометричні датчики шляху, що видають сигнали пропорційні куту повороту кабіни (кути а і р, див фіг 8 і фіг 9) Рухома платформа 7 виконана зв'язаною з нерухомою платформою 8 за допомогою опори 14 Імітатор динаміки кабіни тренажера додатково обладнаний електропдроприводами 15, пдропідсилювачем 16, рухомим ПІДВІСНИМ карданним вузлом 17 та демпферами 18 коливань у КІЛЬКОСТІ не менше двох, які конструктивно виконано закріпленими до нижньої нерухомої платформи 8 При цьому нерухома платформа 8 обладнана гумовими прокладками 19, направляючими 20 для повзунів 21 та регулювальними гвинтами 22, кожний з яких виконано з'єднаним з повзуном 21 До складу електропдропривода 16 входять гідронасоси 23 з вбудованими усередині блоками регулювання та електромагнітами, виконавчі гідроциліндри 9 зі штоками 24 та поповнювальні баки 25 Виконавчі гідроциліндри 9 електропдроприводу 16 своїми штоками 24 закріплено до нижньої нерухомої платформи 8 за допомогою нерухомих вилок 26, а до верхньої рухомої платформи 7 - за допомогою поворотних вилок 27 Конструктивно подовжні демпфери 10 закріплюється до верхньої рухомої платформи 7 нерухомо за допомогою шарових пальців 28, а до нижньої нерухомої платформи 8 - рухомо за допомогою нижніх шарових пальців 29, при цьому зазначені нижні шарові пальці 29 закріплюються до повзунів 21 Подовжній демпфер 10 (демпфер подовжнього каналу) містить телескопічний шток ЗО і пружину 31, закріплену у двох стаканах 32 через прокладку 33 (див фіг 10) Кожний з поперечних демпферів 8 11 (демпферів поперечного каналу) містить пружину 34, систему блоків 35, трос 36 та регулювальний гвинт 37 (див фіг 11) Конструктивно кабіна 1 виконана у вигляді точної копи відділення керування транспортним засобом, наприклад, відділення керування танка Т72, в об'ємі, що необхідний для навчання водінню того або іншого транспортного засобу (ВІДПОВІДНО до програми навчання), і обладнаною штатними перископічними приладами спостереження 38 та люком 39 Робота імітатора динаміки кабіни тренажера навчання водінню транспортних засобів пояснюється за допомогою обладнання, яке входить у систему керування 12 зазначених тренажерів, і призначене для забезпечення роботи імітатора тренажеру в цілому при імітації коливань корпуса вищезазначених транспортних засобів в процесі навчання водінню До системи керування 12 входять датчики 40 органів керування 3 та 4, контролер 41, пульт 42 інструктора, плати ключів 43, пристрій зв'язку 44, перший 45 і другий 46 комп'ютери, блок керування 47, блок зв'язку 48, модуль 49 керування електропдроприводом 15, блок 50 звукової інформації, дисплей 51, пристрій 52 ведення протоколу, а також пристрій візуалізацм 53 До складу зазначеного пристрою візуалізацм 53 входять мультимедійний широкоформатний проектор 54 та широкий екран 55 Перший комп'ютер 45 і другий комп'ютер 46 об'єднані у обчислювальний пристрій 56 Контролер 41, плата ключів 43 і модуль 49 керування електропдроприводами 15 об'єднані в погоджувальний пристрій 57, причому вихід плати ключів 43 виконаний з'єднаним з одним із входів модуля 49 керування електропдроприводами 15 Кабіна 1 оснащується динаміком 58, який може бути розташований як усередині відділення керування, так і в шоломофоні 59 того, якого навчають 6 (див фіг 1 і фіг 7) Пульт 42 інструктора з дисплеєм 51 і з контрольно-вимірювальними приладами розміщається на містку 60, постаченому сходами 61 (див фіг 2 і фігЗ) Зв'язок між складовими елементами системи керування 12 здійснюється за допомогою електричних кабелів 62 Елементи гідросистеми виконано зв'язаними між собою за допомогою трубопроводів 63 високого тиску (див фіг 1 та фіг 4) Згідно ЗІ схемою, наведеною на фіг1, датчики 40 органів керування виконано зв'язаними з важелями керування 3 і педалями 4, що є конструктивно розташованими в кабіні 1 Згадані датчики 40 органів керування 3 і 4 виконані сполученими з контролером 41 Виходи контролера 41 виконано безпосередньо сполученими із входами пульта 42 інструктора, імітатора приладової дошки 2 і плати ключів 43 При цьому пульт 42 інструктора виконано сполученим додатковим зворотним зв'язком із входом контролера 41 Вихід плати ключів 43 виконано сполученим з датчиками 40 органів керування через важелі керування 3 і педалі 4, а четвертий вихід контролера 41 виконаний сполученим через пристрій зв'язку 44 із першим комп'ютером 45 До другого входу згаданого першого комп'ютера 45 підключений блок керування 47 Виходи 56086 10 першого комп'ютера 45 виконано сполученими за туаци і динаміку зміни профілю поверхні траси допомогою електричних кабелів 60 із блоком зв'язводіння Програмне забезпечення моделювання ку 48, другим комп'ютером 46, модулем 49 керудорожньої ситуації перший комп'ютер 45 подає на вання електропдроприводами 15 і блоком звукової мультимедійний широкоформатний проектор 54 інформації 50 Перший комп'ютер 45 і другий комчерез блок зв'язку 44, а програмне забезпечення п'ютер 46 об'єднані у обчислювальний пристрій 56 моделювання динаміки зміни профілю поверхні Другий комп'ютер 42 обчислювального пристрою траси водіння перший комп'ютер 45 подає на модуль 49 керування електропдроприводами 15 56 виконаний сполученим з входом дисплея 51 і Таким чином на широкому екрані 55 відображавходом пристрою ведення протоколу 52 Модуль ється дорожня ситуація, а модуль 49 керування 49 керування електропдроприводами 15, у свою електропдроприводами 15 забезпечує спрацьовучергу, виконаний сполученим з електромагнітами вання імітатора 64 динаміки кабіни 1, при цьому блока регулювання, розміщеними в гідронасосі 23 через рухомий ПІДВІСНИЙ карданний вузол 17 і гіделектропдропривода 15 імітатора динаміки кабіни роциліндри 9 кабіні 1 надаються подовжньо-кутові, 1 Згадані електропдроприводи 15 і рухомий ПІДВІпоперечно-кутові і вертикальні коливання (разом з СНИЙ карданний вузол 17 забезпечують кабіні 1 кабіною 1) робочого місця 5 того, якого навчають (разом із тим, якого навчають 6, і який знаходиться (позиція 6), ВІДПОВІДНО до зміни профілю траси в зазначеній кабіні 1) можливість робити подовжньо-кутові і поперечні коливання зі швидкостями і ВОДІННЯ прискореннями, що наближені до реальних колиТой, якого навчають (позиція 6), за командою вань корпуса транспортного засобу, наприклад, інструктора «запускає» двигун, при цьому блок танка, під час руху останнього Згаданий блок зв'язвукової інформації 50 відтворює звук сигналу, зку 48 конструктивно виконаний сполученим з примастилонакачувального насосу, стартера і прастроєм візуалізацм 53, а саме, із мультимедійним цюючого двигуна, наприклад, за допомогою динаширокоформатним проектором 54 Пристрій візуаміка 58, який виконано розташованим усередині лізацм 53 містить також широкий екран 55 Той, відділення керування транспортним засобом, або якого навчають (позиція 6), спостерігає за дорожподає зазначений звук на навушники, які розташоньою обстановкою, що відображається за допомовано в шоломофоні 59 Перший комп'ютер 45 чегою проектора 54 на широкому екрані 55, крізь рез блок зв'язку 48 (а через другий комп'ютер 46 штатні перископічні прилади спостереження 38, на дисплей 51) видає на мультимедійний широкощо встановлені в кабіні 1 Контролер 41, плата форматний проектор 54 програмне забезпечення у ключів 43 і модуль 49 керування електропдропривигляді кольорової графічної моделі траси водіння водами 15 об'єднані в погоджувальний пристрій і дорожньої обстановки Той, якого навчають (по57, причому вихід плати ключів 43 виконаний з'єдзиція 6), спостерігає за зміною дорожньої обстанонаним з одним із входів модуля 49 керування елевки крізь перископічні прилади спостереження 38 ктропдроприводами 15 (див фіг 2 - 3 та фіг 7) і коректує рух транспортноКонструктивні елементи (позиція 7-39) входять до складу імітатора 64 динаміки кабіни 1 Імітатор 64 динаміки кабіни 1 у складі тренажера навчання водінню транспортних засобів працює наступним чином Той, якого навчають (позиція 6 - наприклад, по програмі навчання механіка-водія танка Т-72 або іншого гусеничного транспортного засобу) займає положення біля макету кабіни 1 (наприклад, передньої частини танка Т-72, де знаходиться відділення керування) Інструктор піднімається по сходам 61 на місток 60 і займає місце за пультом керування 42, який оснащено дисплеєм 51 і контрольно-вимірювальними приладами, аналогічними тим, що знаходяться в макеті кабіни 1 на імітаторі приборової дошки 2 (див фіг 2 - 3) За командою інструктора той, якого навчають (позиція 6), одягає шоломофон 59 і займає робоче місце 5 у кабіні 1, що імітує відділення керування транспортного засобу, наприклад, танка Т-72 (див фіг 1 і фіг 7) При цьому відпрацьовуються тимчасові нормативи по посадці в транспортний засіб Інструктор за допомогою пульта 42 керування вмикає контролер 41 погоджувального пристрою 57 (див фіг 1) Сигнал з пульта 42 через вхід контролера 41 подається на імітатор приладової дошки 2, що розміщена в кабіні 1, і на пристрій зв'язку 44 3 пристрою зв'язку 44 керуючий сигнал подається на обчислювальний пристрій 56, а саме, на перший комп'ютер 45 Перший комп'ютер 45 відпрацьовує програму моделювання дорожньої си го засобу за допомогою важелів 3 і педалей 4 При переміщенні важелів 3 і педалей 4, у блоці датчиків 40 виробляється керуючий сигнал f, що надходить у контролер 41 погоджувального пристрою 57, який моделює транспортний засіб і його агрегати (див фіг1) У результаті моделювання в контролері 41 реалізуються параметри руху транспортного засобу (швидкість, курс, коливання корпуса), а також параметри, що визначають функціонування окремих систем і агрегатів транспортного засобу Сигнали, які відповідають цим параметрам, надходять із контролера 41 на вхід імітатора приладової дошки 2, де перетворюються в показання ВІДПОВІДНИХ імітаторів приладів Таким чином формується приладова інформація про роботу транспортного засобу У платі ключів 43 утворюються сигнали, які відповідають зусиллям на органах керування 3 і 4 У блоці 50 звукової інформації утворюються сигнали, які відповідають, наприклад, звуку роботи двигуна, звуку бою, ударам бонових вражаючих елементів по корпусу транспортного засобу, а в модулі 49 керування електропдроприводом 15 (гідроциліндрами 9) утворюються сигнали, які відповідають профілю траси водіння За допомогою блока керування 47 інструктор вводить у перший комп'ютер 45 графічну інформацію щодо ландшафту і дорожньої ситуації , після чого комп'ютери 45 і 46 обчислювального пристрою 56 моделюють для того, якого навчають (позиція 6), дорожню ситуацію в динаміці її розвит 56086 12 11 ку Це програмне забезпечення видається на шибіни в цілому рокий екран 55 і на дисплей 51 інструктора ВодДля кожного типу машини (транспортного заночас перший комп'ютер 45 моделює динаміку собу) зусилля затягування пружини (позиція 31 і зміни профілю поверхні траси водіння і через мо34) демпферів, ВІДПОВІДНО, подовжнього 10 і попедуль 49 керування електропдроприводами 15 приречного 11 каналів регулюються за допомогою водить в дію імітатор 64 динаміки кабіни 1 регулювального гвинта (ВІДПОВІДНО, ПОЗИЦІЇ 22 і 37), при цьому, при повороті згаданого регулюваС модуля керування електропдроприводами льного гвинта 22 повзун 21 (який розташований на 49 сигнал надходить на електромагніти блоку ренаправляючій 20 подовжнього каналу) переміщагулювання 47 електропдроприводами 15 За доється по направляючій 20 у ту чи іншу сторони, помогою електромагнітів (які розташовані в гідростискаючи чи розтискаючи пружину 31 Для демпнасосі 23) змінюється продуктивність зазначених фера 11 поперечного каналу напрямок зміни сили гідронасосів 23, що приводить до зміни тиску в затягування пружини 34 здійснюється також за одній з порожнин виконавчого гідроциліндра 9 і до допомогою регулювального гвинта 37, що керує руху штока 24 (закріпленого як до верхньої рухонатягом тросів 36, встановлених у системі блоків мої платформи 7, так і до нижньої нерухомої пла35 (див фіг 11) тформи 8, ВІДПОВІДНО, у поворотній вилці 27 і в нерухомій вилці 26) на висування чи на уборку При коливаннях верхньої рухомої платформи Одночасно з роботою виконавчих гідроциліндрів 9 7 (із закріпленою на ній кабіною 1 того, якого нау роботу вступає гідр о підсилювач 16, який перевчають (позиція 6)), рухомий ПІДВІСНИЙ карданний творює механічну енергію приводного електродвивузол 17 забезпечує згаданій платформі 7 тільки гуна гідронасоса 23 в енергію потоку робочої рідиподовжні і поперечні коливання, не допускаючи ни, пропорційну сигналу керування Таким чином, при цьому переміщень платформи 7 по обрію Тапри висуванні (чи при уборці) штоків 24 гідроциліким чином рухомий ПІДВІСНИЙ карданний вузол 17 ндра 9 через поворотні вилки 27 (закріплені на забезпечує коливання верхньої рухомої платфорповоротній платформі 7) рухома платформа 7 відми 7 щодо нерухомої нижньої платформи 8 у похиляється чи вверх, чи вниз (у залежності від наперечних чи подовжніх площинах (щодо точки кріпрямку ходу штока 24 гідроциліндра 9) Кут нахилу плення верхньої рухомої платформи 7 до рухомої платформи 7 контролюється за допоморухомого ПІДВІСНОГО карданного вузла 17)(див гою датчиків 13 У залежності від вихідного сигнафіг 8 - 9), забезпечуючи при цьому подовжньолу (який подається з модуля 49 керування електкутові, поперечно-кутові і вертикальні коливання ропдроприводами 15), його величини і напрямку, робочого місця 5 того, якого навчають 6, ВІДПОВІДштоки 24 гідроциліндрів 9 висуваються чи убираНО до зміни профілю траси водіння ються з різною швидкістю і нарізну величину (по Паралельно з цим опора 14 також не допускає відношенню один до другого в різних каналах), що переміщень верхньої рухомої платформи 7 по обприводить до поздовжньо-поперечних коливань рію верхньої рухомої платформи 7 (див фіг 8 і фіг 9) За допомогою блока керування 47 і першого При цьому, якщо штоки 24 гідроциліндрів 9 висукомп'ютера 45 можливо з великою вірогідністю ваються чи убираються з постійною швидкістю і на передавати для зорового сприйняття того, якого однакову величину, то рухома платформа 7 буде навчають (позиція 6), зміну погодних умов (у виробити тільки подовжні коливання (див фіг 8) Якгляді крапель дощу або сніжинок, які падають на що штоки 24 виконавчих гідроциліндрів 9 висуваскло перископічного приладу спостереження 38), ються чи убираються з різними швидкостями і на водіння з приладом нічного бачення (позиція 65) у різні величини, то рухома платформа 7 буде робитумані, роботу регулювальника, світлофора, рух ти разом з подовжніми і поперечного коливання зустрічних і побіжних транспортних засобів, іміта(див фіг 9) цію вибухів на полі бою, наїзд на стовпи, дерева, спорудження й інше Також можливе моделювання Під час роботи виконавчих гідроциліндрів 9 різних ситуацій на дорозі, включаючи аварійні компенсація зміни об'ємів робочої рідини в гідроСистема візуалізацм, до якої входять пристрій вісистемі здійснюється по трубопроводах високого зуалізацм 53 і обчислювальний пристрій 56, дозвотиску 63 з поповнювальних баків 25 (див фіг1) ляє змоделювати зовнішню зорову інформацію Поповнювальний бак 25 призначений також для щодо руху транспортного засобу із широким кутом поповнення витоків робочої рідини з гідравлічних зору без спотворювання ЛІНІЙНИХ І кутових харакприладів, компенсації зміни об'єму робочої рідини теристик елементів дорожньої обстановки, на підгідравлічної системи при коливаннях температури ставі котрої той, якого навчають (позиція 6), рой охолодження робочої рідини бить ВІДПОВІДНІ (адекватні) дорожній обстановці При роботі виконавчих гідроциліндрів 9 пооперації з органами керування (позиції 3 і 4) довжні 10 і поперечні 11 демпфери згладжують транспортним засобом Згадані органи керування різкі коливання верхньої рухомої платформи 7 (позиції 3 і 4), у свою чергу, через датчики 40 оргаВІДПОВІДНО до типу машини, динаміка руху якої нів керування і контролер 41 передають дані щодо імітується При коливаннях верхньої рухомої плазміни положення органів керування (позиції 3 і 4) тформи 7 демпфери 11 подовжнього каналу задо першого комп'ютера 45, який виконує обробку безпечують імітацію удару машини об природні і зазначеної інформації (керуючого сигналу f) і зв'яштучні перешкоди при імітації руху по трасі ("прозує и з фактичною дорожньо-транспортною ситуабіг ПІДВІСКИ") ПОДОВЖНІЙ демпфер 10 врівноважує цією на екрані дисплея 51 і на широкому екрані 55 верхню рухому платформу 7 у поздовжньопристрою візуалізацм 53 Зміна ситуації на трасі горизонтальному положенні Гумові прокладки 19 водіння робиться за допомогою передачі зазначезабезпечують амортизацію імітатора динаміки ка 14 13 56086 По завершенню програми навчання інструктор ноі інформації на широкий екран 55 за допомогою робить розбір помилок, які зробив той, якого намультимедійного широкоформатного проектора вчають (позиція 6), за допомогою відтворення за54, підключеного до першого комп'ютера 45 через пису, зробленого за допомогою пристрою ведення блок зв'язку 48, за допомогою програмного забезпротоколу 52 печення у вигляді кольорової графічної моделі траси водіння і дорожньої обстановки Зміна (у На цьому процес навчання на тренажері закінВІДПОВІДНОСТІ до змін у дорожньо-транспортній чується ситуації} коливань транспортного засобу (кабіни 1) Підвищення ефективності застосування треі звукової інформації робиться, ВІДПОВІДНО, за донажера навчання водінню транспортних засобів, у помогою імітатора 64 динаміки кабіни 1 (через порівнянні з прототипом досягається за рахунок модуль 49 керування агрегатами електропдроприполіпшення якості навчання й економи при цьому вода 15) і за допомогою блока 50 звукової інфорпаливно-мастильних матеріалів і моторесурсу мації (через динамік 58 і навушники шоломофона техніки Також підвищення ефективності застосу59), підключених до згаданого першого комп'ютера вання тренажера полягає в підвищенні вірогідності 45 графічної моделі дорожньо-транспортної ситуації, що відображає дорожню обстановку без спотвоВесь процес навчання (швидкість руху, помилрювання ЛІНІЙНИХ і кутових характеристик и елеки у техніці водіння) записується пристроєм вементів і використанню імітатора динаміки кабіни дення протоколу 52, підключеного до другого комдинамічної платформи, що забезпечує подовжньоп'ютера 46 з виданням підсумкової оцінки у вигляді кутові, поперечно-кутові і вертикальні коливання протоколу на екрані дисплею 51 кабіни в районі робочого місця того, якого навчаПрипинення процесу навчання робиться в ють, із швидкостями і прискореннями, максимальзворотному (викладеному вище) порядку но наближеними до реальних коливань корпуса Той, якого навчають (позиція 6), за командою транспортного засобу під час руху інструктора «заглушує» двигун, при цьому блок звукової інформації 50 відтворює звук двигуна, ДЖЕРЕЛА ІНФОРМАЦІЇ який виключається Далі за командою інструктора 1 Автомобильный тренажер АТ-70 - Прага, той, якого навчають (позиція 6), покидає відділен1971 -С 100-103-аналог ня керування транспортним засобом (кабіну 1) 2 А А Мельник «Тренажеры для обучения через люк 35 При цьому відпрацьовуються норводителей» - Киев, издательство «Техника», мативи щодо покидання транспортного засобу 1973 -С 12-15-прототип (висадці з машини) 22 із т $1 гг за мшізгє 20 is ts z$ ФІГ. 1 16 Фіг. 2 54 22 !9 31 S3 SZ 2Z /2 Z6 Фіг. 4 20 16 23 № 25 Фіг. 6 Фіг. 7 у ^ Фіг. 8 8 19 Фіг. 9 ФІГ. 11 Підписано до друку 05 05 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюSimulator of dynamic actions on the cab of a vehicle driving trainer
Автори англійськоюKhytryk Vasyl Onufriiovych, Medvid Volodymyr Stanislavovych, Bohomol Volodymyr Ivanovych
Назва патенту російськоюИмитатор динамических воздействий на кабину тренажера для обучения вождению транспортных средств
Автори російськоюХитрик Василий Онуфриевич, Медвидь Владимир Станиславович, Богомол Владимир Иванович
МПК / Мітки
МПК: G09B 9/02
Мітки: кабіни, імітатор, водінню, динаміки, транспортних, навчання, тренажера, засобів
Код посилання
<a href="https://ua.patents.su/10-56086-imitator-dinamiki-kabini-trenazhera-dlya-navchannya-vodinnyu-transportnikh-zasobiv.html" target="_blank" rel="follow" title="База патентів України">Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів</a>
Тренажер навчання водінню транспортних засобів
Номер патенту: 41730
Опубліковано: 17.09.2001
Автори: Неговський Олександр Миколайович, Вербний Микола Семенович, Хитрик Василь Онуфрійович
МПК: G09B 9/00
Мітки: тренажер, транспортних, водінню, навчання, засобів
Формула / Реферат:
1.Тренажер навчання водінню транспортних засобів, що містить кабіну транспортного засобу з розташованими у ній імітаторами приладової дошки, важелями керування і робочого місця того, якого навчають, датчики органів керування, зв'язані з входом моделюючого блока, виходи якого виконано сполученими з імітаторами приладової дошки, із пристроєм візуалізації, із пультом інструктора, із блоком звукової інформації і з пристроями узгодження з органами...
Вузол зчленування пасажирських транспортних засобів
Номер патенту: 18199
Опубліковано: 01.07.1997
Автор: Патрило Юрій Євгенович
МПК: B60D 5/00
Мітки: пасажирських, засобів, транспортних, зчленування, вузол
Формула / Реферат:
Вузол зчленування пасажирських транспортних засобів, який містить між переднім i заднім транспортними засобами перехідну платформу, який відрізняється тим, що додатково обладнаний зчіпним пристроєм, а перехідна платформа має дві осі, якими прикріплена до транспортних засобів, однією - до переднього, а Іншою - до заднього.
Пристрій кондиціонування повітря для транспортних засобів
Номер патенту: 44514
Опубліковано: 15.02.2002
Автори: Козак Олег Володимирович, Бачок Олег Сергійович, Драпак Георгій Мефодіович
МПК: B60H 3/00
Мітки: пристрій, транспортних, повітря, засобів, кондиціонування
Формула / Реферат:
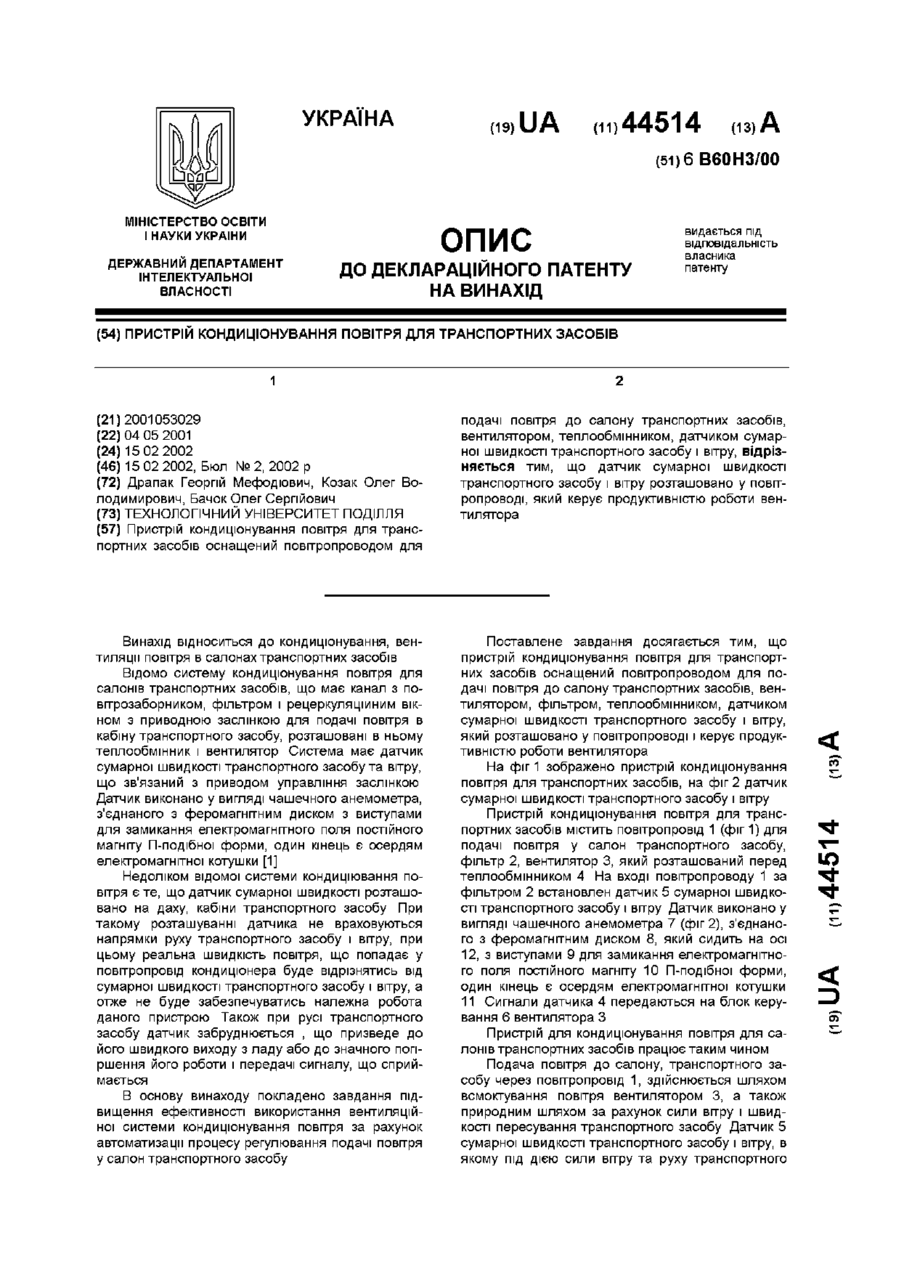
Пристрій кондиціонування повітря для транспортних засобів оснащений повітропроводом для подачі повітря до салону транспортних засобів, вентилятором, теплообмінником, датчиком сумарної швидкості транспортного засобу і вітру, відрізняється тим, що датчик сумарної швидкості транспортного засобу і вітру розташовано у повітропроводі, який керує продуктивністю роботи вентилятора.
Тренажер для операторів транспортних засобів

Номер патенту: 49722
Опубліковано: 16.09.2002
Автори: Крапива Валерій Вікторович, Головань В'ячеслав Григорович, Ярмолюк Вадим Михайлович
Мітки: операторів, засобів, транспортних, тренажер
Формула / Реферат:
1. Тренажер для операторів транспортних засобів, який містить раму, кабіни, симетрично розміщені на кінцях хитної рами, кінематично зв'язаної із системою переміщення кабін, привід для їх переміщення, який відрізняється тим, що система переміщення кожної кабіни складається з електричних двигунів, корпуси яких жорстко з'єднані з основою кабін, другорядним елементом яких є напрямні рами, виконані у вигляді каркасів, що опираються на шаровий...
Пристрій для кондиціонування повітря в салонах транспортних засобів
Номер патенту: 44515
Опубліковано: 15.02.2002
Автори: Козак Олег Володимирович, Драпак Георгій Мефодіович, Бачок Олег Сергійович
МПК: B60H 3/00
Мітки: кондиціонування, засобів, повітря, пристрій, салонах, транспортних
Формула / Реферат:
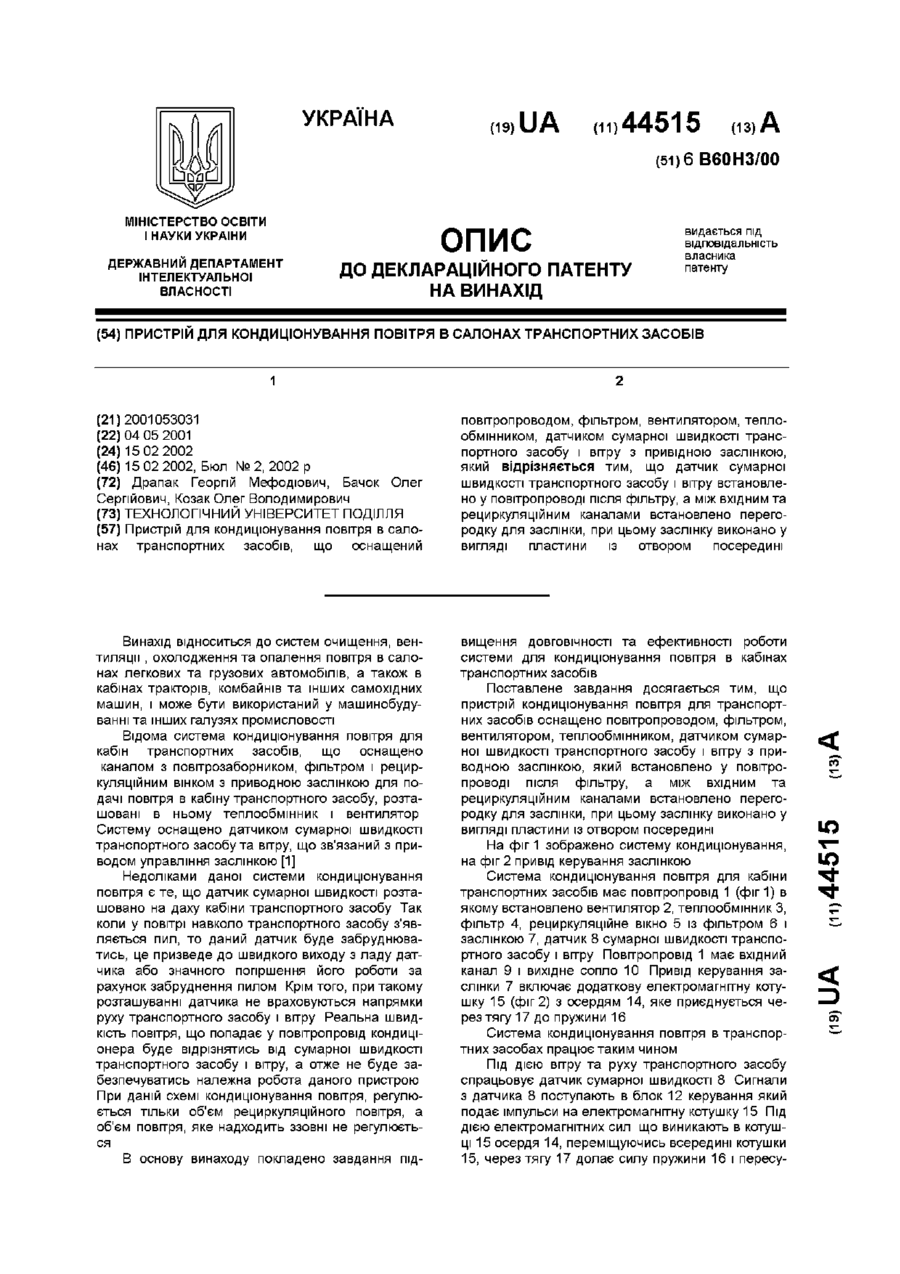
Пристрій для кондиціонування повітря в салонах транспортних засобів, що оснащений повітропроводом, фільтром, вентилятором, теплообмінником, датчиком сумарної швидкості транспортного засобу і вітру з привідною заслінкою, який відрізняється тим, що датчик сумарної швидкості транспортного засобу і вітру встановлено у повітропроводі після фільтру, а між вхідним та рециркуляційним каналами встановлено перегородку для заслінки, при цьому заслінку...
Попередній патент: Спосіб підвищення точності планування роботи бортового спеціального комплексу штучного супутника землі
Наступний патент: Продувна свіча