Тренажер для операторів транспортних засобів
Номер патенту: 49722
Опубліковано: 16.09.2002
Автори: Головань В'ячеслав Григорович, Ярмолюк Вадим Михайлович, Крапива Валерій Вікторович

Формула / Реферат
1. Тренажер для операторів транспортних засобів, який містить раму, кабіни, симетрично розміщені на кінцях хитної рами, кінематично зв'язаної із системою переміщення кабін, привід для їх переміщення, який відрізняється тим, що система переміщення кожної кабіни складається з електричних двигунів, корпуси яких жорстко з'єднані з основою кабін, другорядним елементом яких є напрямні рами, виконані у вигляді каркасів, що опираються на шаровий кінцевик нерухомої опори та поворотно-підіймального пристрою, що складається з поворотного механізму, основою якого є електричний двигун, виконаний у вигляді горизонтально розміщеної дорожньої структури, на якій жорстко закріплені чотири електричні двигуни підіймального механізму, які своїми другорядними елементами шарнірно через компенсаційний механізм з'єднані з каркасом, що споряджений зрівноважувальним механізмом.
2. Тренажер для операторів транспортних засобів за п. 1, який відрізняється тим, що основа кабіни виконана у вигляді електричного двигуна, рухливо з'єднаного з кабіною.
3. Тренажер для операторів транспортних засобів за п. 1, який відрізняється тим, що зрівноважувальний механізм, виконаний у вигляді контейнерів, споряджених електричними двигунами, другорядними елементами яких є направляючі каркаса.
Текст
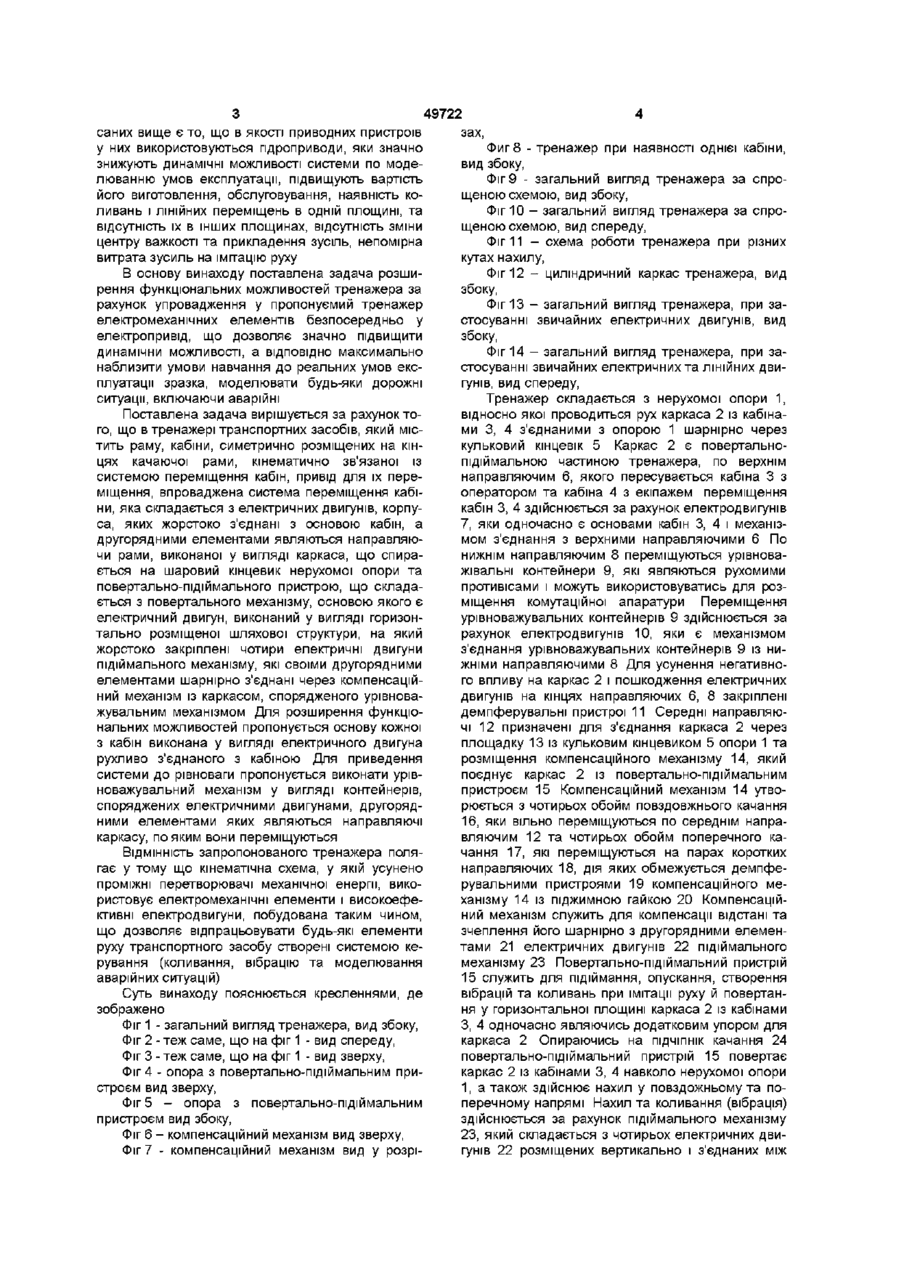
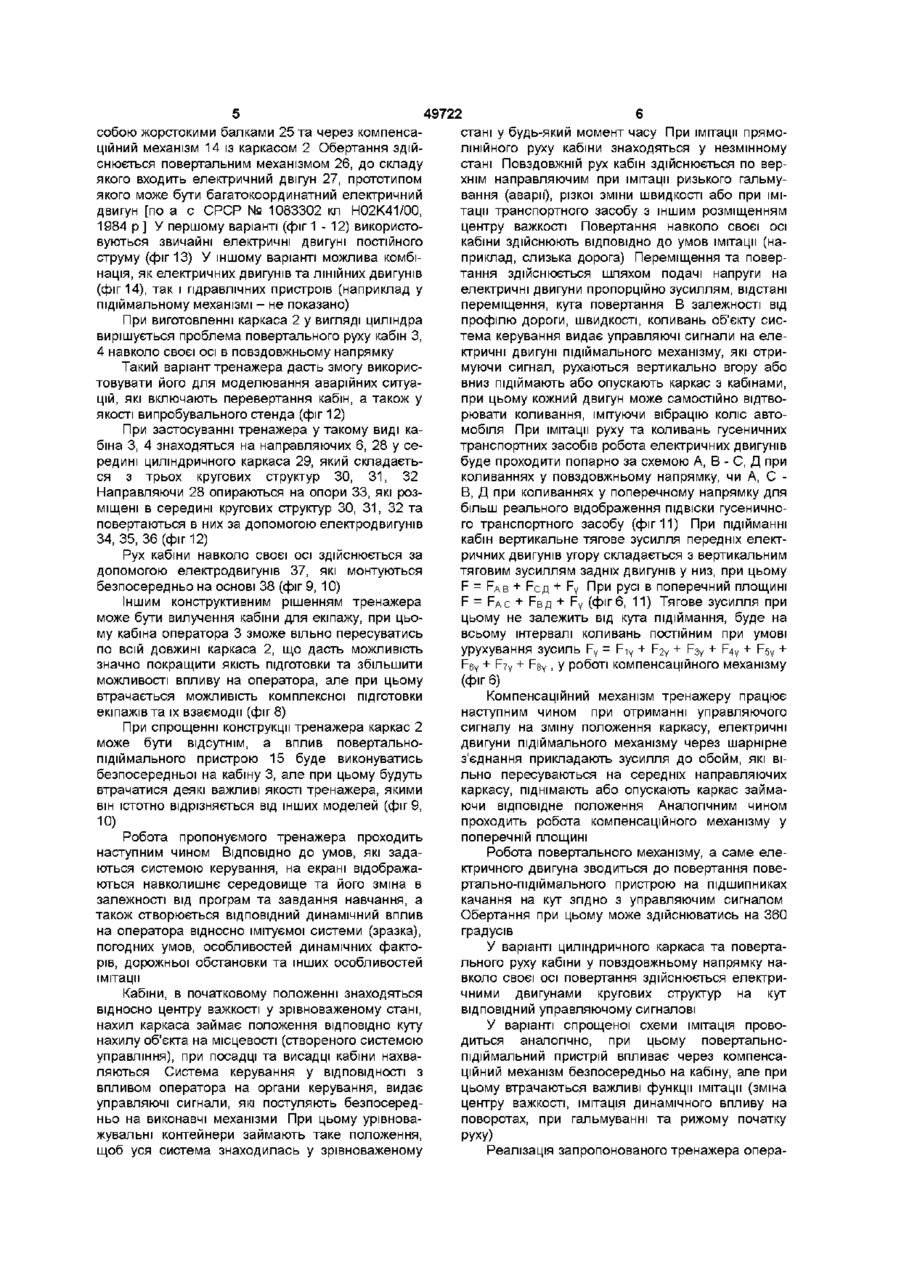
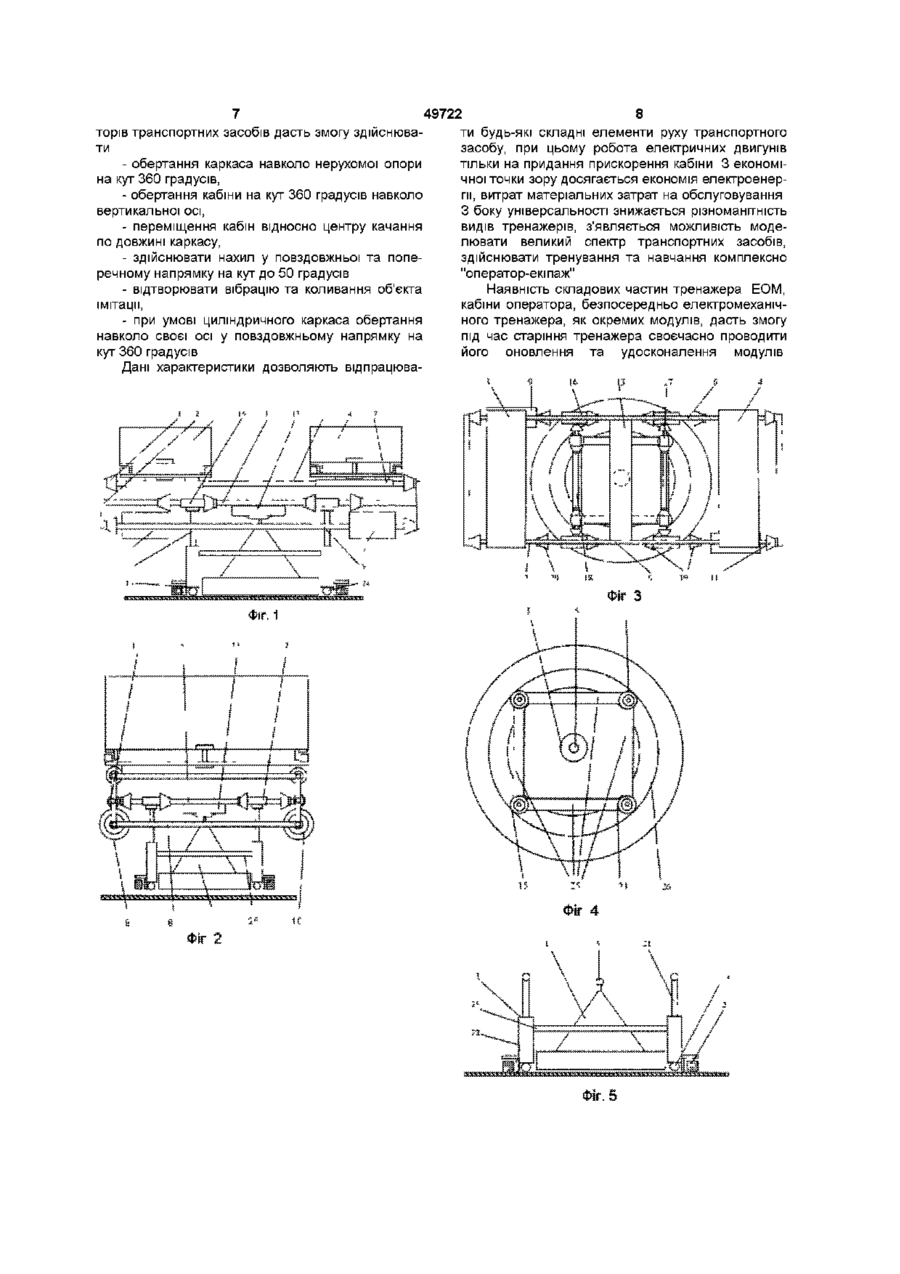
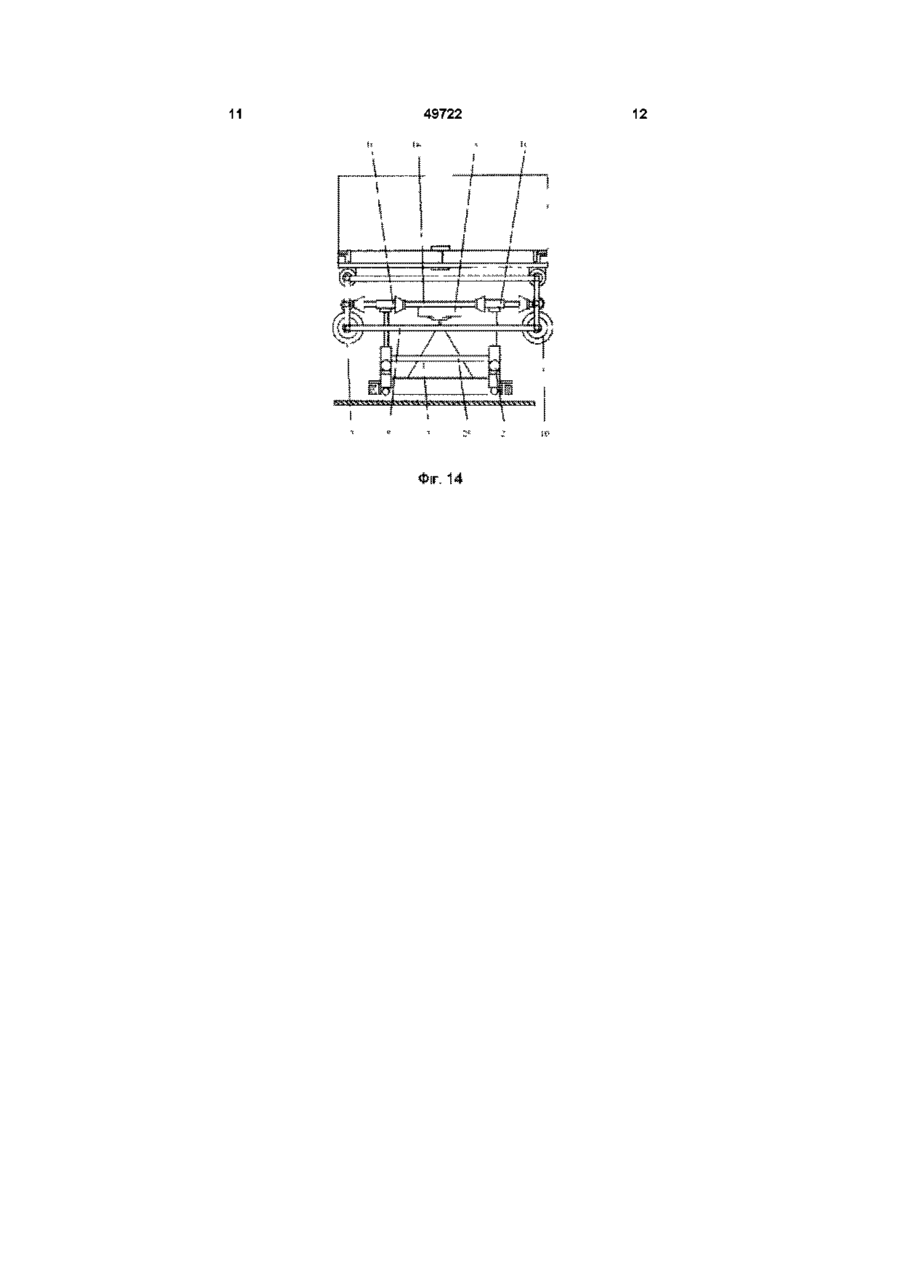
1 Тренажер для операторів транспортних засобів, який містить раму, кабіни, симетрично розміщені на кінцях хитної рами, кінематично зв'язаної із системою переміщення кабін, привід для їх переміщення, який відрізняється тим, що система переміщення кожної кабіни складається з електричних двигунів, корпуси яких жорстко з'єднані з основою кабін, другорядним елементом яких є напрямні рами, виконані у вигляді каркасів, що опираються на шаровий кінцевик нерухомої опори та поворотно-підіймального пристрою, що складається з поворотного механізму, основою якого є електричний двигун, виконаний у вигляді горизонтально розміщеної дорожньої структури, на якій жорстко закріплені чотири електричні двигуни підіймального механізму, які своїми другорядними елементами шарнірно через компенсаційний механізм з'єднані з каркасом, що споряджений зрівноважувальним механізмом 2 Тренажер для операторів транспортних засобів за п 1, який відрізняється тим, що основа кабіни виконана у вигляді електричного двигуна, рухливо з'єднаного з кабіною 3 Тренажер для операторів транспортних засобів за п 1, який відрізняється тим, що зрівноважувальний механізм, виконаний у вигляді контейнерів, споряджених електричними двигунами, другорядними елементами яких є направляючі каркаса Винахід відноситься до технічних систем навчання операторів транспортних засобів, зокрема, до тренажерів операторів гусеничних і колісних машин ВІДОМІ тренажери колісної транспортної техніки, які містять замкнуту трасу з розміщеним на ній автомобілем, на шасі якого встановлена кабіна з механізмом зміни и положення в поперечному і повздовжньому напрямку та можливістю її повернення навколо своєї осі відносно шасі [див , наприклад, авторське свідоцтво СРСР № 1508265 А 1 кл 4 G09B9/04, 1989 р ] їхніми недоліками є неможливість реалізації повздовжніх та поперечних коливань, неможливість центру важкості, моделюємого на тренажері транспортного засобу, що недостатньо наближує умови навчання до реальних умов експлуатації доліком нього тренажера є відсутність кутових переміщень, неможливість зміни центру важкості, недостатня наближеність умов навчання до реальних умов експлуатації, наявність гідравлічних приводів, які ускладнюють імітацію коливань і вібрацію суб'єкта експлуатації Найбільш близьким за ознаками у запропонованому в даному технічному рішенні є тренажер дня персоналу транспортних засобів, який містить раму і дві кабіни, симетрично розташованих на кінцях штанги качаючої рами, кінематичне зв'язаних із системою переміщення кабін, приводу переміщення кабін, а також приводу переміщенню, забезпеченого ричажно-копірним механізмом [авторське свідоцтво СРСР № 1048500 А кп G09B9/02 1983 р ], недоліком якого є використання в ньому приводів ускладнюючих імітацію коливань і вібрацію об'єкта експлуатації, відсутність кутових переміщень, відсутність переміщень кабін відносно центру важкості та наявність ричажно-копірного механізму з ВІДПОВІДНИМ незмінним профілем, який періодично повторює рух Також відомий тренажер оператора гусеничної машини, який містить дволанковий механізм, включаючий коромисло з маятниковим важелем, й обєднану систему керування кабіни з пдроприводами повздовжніх та поперечних коливань [патент України № 32625 С2 кл 7 G09B9/04 2001 р ] Не Загальними недоліками всіх тренажерів опи 1 49722 саних вище є то, що в якості приводних пристроїв у них використовуються пдроприводи, яки значно знижують динамічні можливості системи по моделюванню умов експлуатації, підвищують вартість його виготовлення, обслуговування, наявність коливань і ЛІНІЙНИХ переміщень в одній площині, та відсутність їх в інших площинах, відсутність зміни центру важкості та прикладення зусіль, непомірна витрата зусиль на імітацію руху В основу винаходу поставлена задача розширення функціональних можливостей тренажера за рахунок упровадження у пропонуємий тренажер електромеханічних елементів безпосередньо у електропривід, що дозволяє значно підвищити динамічни можливості, а ВІДПОВІДНО максимально наблизити умови навчання до реальних умов експлуатації зразка, моделювати будь-яки дорожні ситуації, включаючи аварійні Поставлена задача вирішується за рахунок того, що в тренажері транспортних засобів, який містить раму, кабіни, симетрично розміщених на кінцях качаючої рами, кінематично зв'язаної із системою переміщення кабін, привід для їх переміщення, впроваджена система переміщення кабіни, яка складається з електричних двигунів, корпуса, яких жорстоко з'єднані з основою кабін, а другорядними елементами являються направляючи рами, виконаної у вигляді каркаса, що спирається на шаровий кінцевик нерухомої опори та повертально-підіймального пристрою, що складається з повертального механізму, основою якого є електричний двигун, виконаний у вигляді горизонтально розміщеної шляхової структури, на який жорстоко закріплені чотири електричні двигуни підіймального механізму, які своїми другорядними елементами шарнірно з'єднані через компенсаційний механізм із каркасом, спорядженого урівноважувальним механізмом Для розширення функціональних можливостей пропонується основу кожної з кабін виконана у вигляді електричного двигуна рухливо з'єднаного з кабіною Для приведення системи до рівноваги пропонується виконати урівноважувальний механізм у вигляді контейнерів, споряджених електричними двигунами, другорядними елементами яких являються направляючі каркасу, по яким вони переміщуються ВІДМІННІСТЬ запропонованого тренажера полягає у тому що кінематічна схема, у якій усунено проміжні перетворювачі механічної енергії, використовує електромеханічні елементи і високоефективні електродвигуни, побудована таким чином, що дозволяє відпрацьовувати будь-які елементи руху транспортного засобу створені системою керування (коливання, вібрацію та моделювання аварійних ситуацій) Суть винаходу пояснюється кресленнями, де зображено Фіг 1 - загальний вигляд тренажера, вид збоку, Фіг 2 - теж саме, що на фіг 1 - вид спереду, Фіг 3 - теж саме, що на фіг 1 - вид зверху, Фіг 4 - опора з повертально-підіймальним пристроєм вид зверху, Фіг 5 - опора з повертально-підіймальним пристроєм вид збоку, Фіг 6 - компенсаційний механізм вид зверху, Фіг 7 - компенсаційний механізм вид у розрі зах, Фиг 8 - тренажер при наявності однієї кабіни, вид збоку, Фіг 9 - загальний вигляд тренажера за спрощеною схемою, вид збоку, Фіг 10 - загальний вигляд тренажера за спрощеною схемою, вид спереду, Фіг 11 - схема роботи тренажера при різних кутах нахилу, Фіг 12 - циліндричний каркас тренажера, вид збоку, Фіг 13 - загальний вигляд тренажера, при застосуванні звичайних електричних двигунів, вид збоку, Фіг 14 - загальний вигляд тренажера, при застосуванні звичайних електричних та ЛІНІЙНИХ двигунів, вид спереду, Тренажер складається з нерухомої опори 1, відносно якої проводиться рух каркаса 2 із кабінами 3, 4 з'єднаними з опорою 1 шарнірно через кульковий кінцевік 5 Каркас 2 є повертальнопідіймальною частиною тренажера, по верхнім направляючим 6, якого пересувається кабіна 3 з оператором та кабіна 4 з екіпажем переміщення кабін 3, 4 здійснюється за рахунок електродвигунів 7, яки одночасно є основами кабін 3, 4 і механізмом з'єднання з верхними направляючими 6 По нижнім направляючим 8 переміщуються урівноважівальні контейнери 9, які являються рухомими противісами і можуть використовуватись для розміщення комутаційної апаратури Переміщення урівноважувальних контейнерів 9 здійснюється за рахунок електродвигунів 10, яки є механізмом з'єднання урівноважувальних контейнерів 9 із нижніми направляючими 8 Для усунення негативного впливу на каркас 2 і пошкодження електричних двигунів на кінцях направляючих 6, 8 закріплені демпферувальні пристрої 11 Середні направляючі 12 призначені для з'єднання каркаса 2 через площадку 13 із кульковим кінцевиком 5 опори 1 та розміщення компенсаційного механізму 14, який поєднує каркас 2 із повертально-підіймальним пристроєм 15 Компенсаційний механізм 14 утворюється з чотирьох обойм повздовжнього качання 16, яки вільно переміщуються по середнім направляючим 12 та чотирьох обойм поперечного качання 17, які переміщуються на парах коротких направляючих 18, дія яких обмежується демпферувальними пристроями 19 компенсаційного механізму 14 із піджимною гайкою 20 Компенсаційний механізм служить для компенсації відстані та зчеплення його шарнірно з другорядними елементами 21 електричних двигунів 22 підіймального механізму 23 Повертально-підіймальний пристрій 15 служить для підіймання, опускання, створення вібрацій та коливань при імітації руху й повертання у горизонтальної площині каркаса 2 із кабінами З, 4 одночасно являючись додатковим упором для каркаса 2 Опираючись на ПІДЧІПНІК качання 24 повертально-підіймальний пристрій 15 повертає каркас 2 із кабінами 3, 4 навколо нерухомої опори 1, а також здійснює нахил у повздожньому та поперечному напрямі Нахил та коливання (вібрація) здійснюється за рахунок підіймального механізму 23, який складається з чотирьох електричних двигунів 22 розміщених вертикально і з'єднаних між 49722 собою жорстокими балками 25 та через компенсаційний механізм 14 із каркасом 2 Обертання здійснюється повертальним механізмом 26, до складу якого входить електричний двігун 27, прототипом якого може бути багатокоординатний електричний двигун [по а с СРСР № 1083302 кл Н02К41/00, 1984 р ] У першому варіанті (фіг 1-12) використовуються звичайні електричні двигуні постійного струму (фіг 13) У іншому варіанті можлива комбінація, як електричних двигунів та ЛІНІЙНИХ двигунів (фіг 14), так і гідравлічних пристроїв (наприклад у підіймальному механізмі - не показано) При виготовленні каркаса 2 у вигляді циліндра вирішується проблема повертального руху кабін З, 4 навколо своєї осі в повздовжньому напрямку Такий варіант тренажера дасть змогу використовувати його для моделювання аварійних ситуацій, які включають перевертання кабін, а також у якості випробувального стенда (фіг 12) При застосуванні тренажера у такому виді кабіна 3, 4 знаходяться на направляючих 6, 28 у середині циліндричного каркаса 29, який складається з трьох кругових структур ЗО, 31, 32 Направляючи 28 опираються на опори 33, які розміщені в середині кругових структур ЗО, 31, 32 та повертаються в них за допомогою електродвигунів 34, 35, 36 (фіг 12) Рух кабіни навколо своєї осі здійснюється за допомогою електродвигунів 37, які монтуються безпосередньо на основі 38 (фіг 9, 10) Іншим конструктивним рішенням тренажера може бути вилучення кабіни для екіпажу, при цьому кабіна оператора 3 зможе вільно пересуватись по всій довжині каркаса 2, що дасть можливість значно покращити якість підготовки та збільшити можливості впливу на оператора, але при цьому втрачається можливість комплексної підготовки екіпажів та їх взаємодії (фіг 8) При спрощенні конструкції тренажера каркас 2 може бути відсутнім, а вплив повертальнопідіймального пристрою 15 буде виконуватись безпосередньої на кабіну 3, але при цьому будуть втрачатися деякі важливі якості тренажера, якими він істотно відрізняється від інших моделей (фіг 9, 10) Робота пропонуємого тренажера проходить наступним чином ВІДПОВІДНО ДО умов, які задаються системою керування, на екрані відображаються навколишнє середовище та його зміна в залежності від програм та завдання навчання, а також створюється ВІДПОВІДНИЙ динамічний вплив на оператора відносно імітуємої системи (зразка), погодних умов, особливостей динамічних факторів, дорожньої обстановки та інших особливостей імітації Кабіни, в початковому положенні знаходяться відносно центру важкості у зрівноваженому стані, нахил каркаса займає положення ВІДПОВІДНО куту нахилу об'єкта на місцевості (створеного системою управління), при посадці та висадці кабіни нахваляються Система керування у ВІДПОВІДНОСТІ З впливом оператора на органи керування, видає управляючі сигнали, які постуляють безпосередньо на виконавчі механізми При цьому урівноважувальні контейнери займають таке положення, щоб уся система знаходилась у зрівноваженому стані у будь-який момент часу При імітації прямолінійного руху кабіни знаходяться у незмінному стані Повздовжній рух кабін здійснюється по верхнім направляючим при імітації ризького гальмування (аварії), різкої зміни швидкості або при ІМІтацм транспортного засобу з іншим розміщенням центру важкості Повертання навколо своєї осі кабіни здійснюють ВІДПОВІДНО ДО умов імітації (наприклад, слизька дорога) Переміщення та повертання здійснюється шляхом подачі напруги на електричні двигуни пропорційно зусиллям, відстані переміщення, кута повертання В залежності від профілю дороги, швидкості, коливань об'єкту система керування видає управляючі сигнали на електричні двигуні підіймального механізму, які отримуючи сигнал, рухаються вертикально вгору або вниз підіймають або опускають каркас з кабінами, при цьому кожний двигун може самостійно відтворювати коливання, імітуючи вібрацію коліс автомобіля При імітації руху та коливань гусеничних транспортних засобів робота електричних двигунів буде проходити попарно за схемою А, В - С, Д при коливаннях у повздовжньому напрямку, чи А, С В, Д при коливаннях у поперечному напрямку для більш реального відображення ПІДВІСКИ гусеничного транспортного засобу (фіг 11) При підійманні кабін вертикальне тягове зусилля передніх електричних двигунів угору складається з вертикальним тяговим зусиллям задніх двигунів у низ, при цьому F = FAB + Fcfl + Fv При русі в поперечний площині F = F + Fv (фіг 6, 11) Тягове зусилля при цьому не залежить від кута підіймання, буде на всьому інтервалі коливань постійним при умові урухування зусиль Fv = Fi v + F2v + F3v + F4v + F5v + F6y + F7V + Fs v , у роботі компенсаційного механізму (фіг 6) Компенсаційний механізм тренажеру працює наступним чином при отриманні управляючого сигналу на зміну положення каркасу, електричні двигуни підіймального механізму через шарнірне з'єднання прикладають зусилля до обойм, які вільно пересуваються на середніх направляючих каркасу, піднімають або опускають каркас займаючи відповідне положення Аналогічним чином проходить робота компенсаційного механізму у поперечній площині Робота повертального механізму, а саме електричного двигуна зводиться до повертання повертально-підіймального пристрою на підшипниках качання на кут згідно з управляючим сигналом Обертання при цьому може здійснюватись на 360 градусів У варіанті циліндричного каркаса та повертального руху кабіни у повздовжньому напрямку навколо своєї осі повертання здійснюється електричними двигунами кругових структур на кут ВІДПОВІДНИЙ управляючому сигналові У варіанті спрощеної схеми імітація проводиться аналогічно, при цьому повертальнопідіймальний пристрій впливає через компенсаційний механізм безпосередньо на кабіну, але при цьому втрачаються важливі функції імітації (зміна центру важкості, імітація динамічного впливу на поворотах, при гальмуванні та рижому початку руху) Реалізація запропонованого тренажера опера торів транспортних засобів дасть змогу здійснювати - обертання каркаса навколо нерухомої опори на кут 360 градусів, - обертання кабіни на кут 360 градусів навколо вертикальної осі, - переміщення кабін відносно центру качання по довжині каркасу, - здійснювати нахил у повздовжньої та поперечному напрямку на кут до 50 градусів - відтворювати вібрацію та коливання об'єкта імітації, - при умові циліндричного каркаса обертання навколо своєї осі у повздовжньому напрямку на кут 360 градусів Дані характеристики дозволяють відпрацюва 49722 8 ти будь-які складні елементи руху транспортного засобу, при цьому робота електричних двигунів тільки на придания прискорення кабіни 3 економічної точки зору досягається економія електроенергії, витрат матеріальних затрат на обслуговування З боку універсальності знижається різноманітність видів тренажерів, з'являється можливість моделювати великий спектр транспортних засобів, здійснювати тренування та навчання комплексно "оператор-екіпаж" Наявність складових частин тренажера ЕОМ, кабіни оператора, безпосередньо електромеханічного тренажера, як окремих модулів, дасть змогу під час старіння тренажера своєчасно проводити його оновлення та удосконалення модулів 49722 10 / / \ чг. •ir і : 11 49722 И\1. 12
ДивитисяДодаткова інформація
Назва патенту англійськоюSimulator for training operators of vehicles
Автори англійськоюYarmoliuk Vadym Mykhailovych, Holovan Viacheslav Hryhorovych
Назва патенту російськоюТренажер для обучения операторов транспортных средств
Автори російськоюЯрмолюк Вадим Михайлович, Головань Вячеслав Григорьевич
МПК / Мітки
Мітки: операторів, засобів, тренажер, транспортних
Код посилання
<a href="https://ua.patents.su/6-49722-trenazher-dlya-operatoriv-transportnikh-zasobiv.html" target="_blank" rel="follow" title="База патентів України">Тренажер для операторів транспортних засобів</a>
Тренажер навчання водінню транспортних засобів
Номер патенту: 41730
Опубліковано: 17.09.2001
Автори: Неговський Олександр Миколайович, Вербний Микола Семенович, Хитрик Василь Онуфрійович
МПК: G09B 9/00
Мітки: навчання, транспортних, тренажер, водінню, засобів
Формула / Реферат:
1.Тренажер навчання водінню транспортних засобів, що містить кабіну транспортного засобу з розташованими у ній імітаторами приладової дошки, важелями керування і робочого місця того, якого навчають, датчики органів керування, зв'язані з входом моделюючого блока, виходи якого виконано сполученими з імітаторами приладової дошки, із пристроєм візуалізації, із пультом інструктора, із блоком звукової інформації і з пристроями узгодження з органами...
Пристрій для кондиціонування повітря в салонах транспортних засобів
Номер патенту: 44515
Опубліковано: 15.02.2002
Автори: Козак Олег Володимирович, Бачок Олег Сергійович, Драпак Георгій Мефодіович
МПК: B60H 3/00
Мітки: засобів, пристрій, кондиціонування, транспортних, повітря, салонах
Формула / Реферат:
Пристрій для кондиціонування повітря в салонах транспортних засобів, що оснащений повітропроводом, фільтром, вентилятором, теплообмінником, датчиком сумарної швидкості транспортного засобу і вітру з привідною заслінкою, який відрізняється тим, що датчик сумарної швидкості транспортного засобу і вітру встановлено у повітропроводі після фільтру, а між вхідним та рециркуляційним каналами встановлено перегородку для заслінки, при цьому заслінку...
Карданний вал наземних транспортних засобів
Номер патенту: 1254
Опубліковано: 15.05.2002
Автори: Парфенчик Іван Алєксандровіч, Костюковіч Гєнадій Алєксандровіч, Кравченко Віктор Іванович, Дроздов Віктор Алєксєєвіч, Новік Юрій Яковлєвіч
МПК: B60K 17/22
Мітки: карданний, транспортних, наземних, вал, засобів
Формула / Реферат:
1. Карданний вал наземних транспортних засобів, який має два шарніри, дві кінцеві приєднувальні вилки та механізм змінювання довжини карданного вала, який відрізняється тим, що кріплення карданного вала з агрегатами транспортного засобу виконане в шліцьових приєднувальних кінцевих вилках за допомогою швидкознімних кулькових елементів фіксації від осьових переміщень, а механізм змінювання довжини карданного вала виконаний у вигляді двох...
Пристрій кондиціонування повітря для транспортних засобів
Номер патенту: 44514
Опубліковано: 15.02.2002
Автори: Драпак Георгій Мефодіович, Козак Олег Володимирович, Бачок Олег Сергійович
МПК: B60H 3/00
Мітки: кондиціонування, пристрій, транспортних, повітря, засобів
Формула / Реферат:
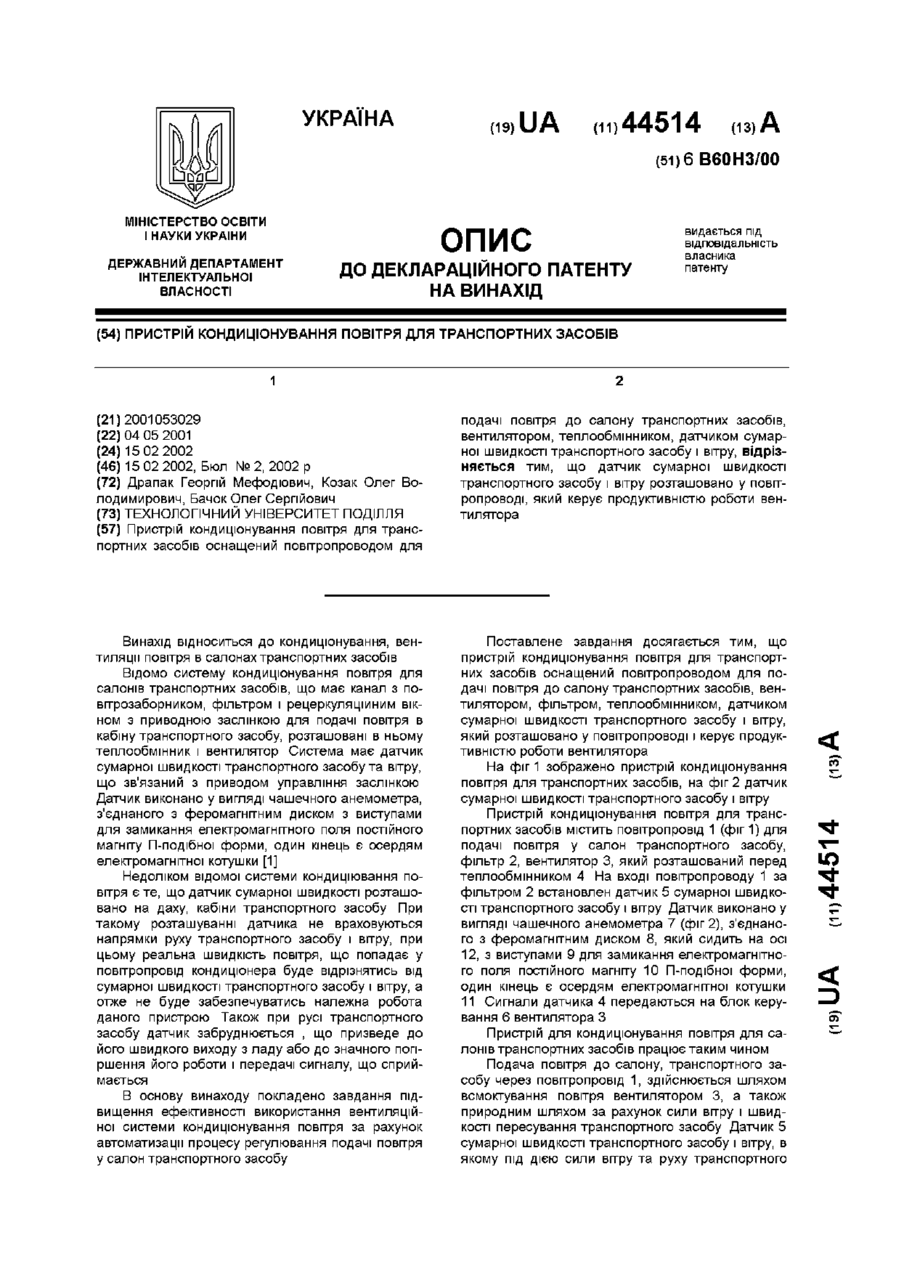
Пристрій кондиціонування повітря для транспортних засобів оснащений повітропроводом для подачі повітря до салону транспортних засобів, вентилятором, теплообмінником, датчиком сумарної швидкості транспортного засобу і вітру, відрізняється тим, що датчик сумарної швидкості транспортного засобу і вітру розташовано у повітропроводі, який керує продуктивністю роботи вентилятора.
Пристрій для опалення салонів колісних транспортних засобів

Номер патенту: 1397
Опубліковано: 16.09.2002
Автори: Любинський Віктор Абрамович, Деречі Олександр Васильович
МПК: B61D 27/00
Мітки: опалення, салонів, колісних, засобів, транспортних, пристрій
Формула / Реферат:
Пристрій для опалення салонів колісних транспортних засобів, який містить нагрівник, опалювальний котел, резервуар для води, розширювальний бачок, циркуляційний насос, трубопроводи і опалювальні батареї, який відрізняється тим, що опалювальні батареї установлені співвісно з підвідними і відвідними трубопроводами і виконані у вигляді труб, на зовнішніх поверхнях яких установлені рознімні основи, причому останні забезпечені ребрами, розміщеними...
Попередній патент: Склад фіточаю №6
Наступний патент: Спосіб підготовки і пуску ракети з корабельної пускової установки
Випадковий патент: Система стабілізованого підвісу магнітолевітуючого транспортного засобу