Фазовий радіопеленгатор
Номер патенту: 67323
Опубліковано: 10.02.2012
Автори: Авдєєнко Гліб Леонідович, Ільченко Михайло Юхимович, Буділовський Олександр Вікторович, Ліпчевськая Інна Леонідівна, Якорнов Євгеній Аркадійович


Формула / Реферат
Фазовий радіопеленгатор, що містить чотири антени, розташовані в одній площині по прямій лінії з різницею довжин баз ![]() , що дорівнює
, що дорівнює ![]() , де
, де ![]() - середня довжина хвилі робочого діапазону пеленгатора,
- середня довжина хвилі робочого діапазону пеленгатора, ![]() - задана границя сектора однозначності визначення пеленга, а довжина бази
- задана границя сектора однозначності визначення пеленга, а довжина бази ![]() визначається з умови
визначається з умови ![]() , чотири приймачі, з'єднані по входах з антенами, а по виходах - з блоком демодуляції сигналу, включаючі в себе три суматори, три блоки віднімання і шість амплітудних детекторів, та блок логічної обробки, причому виходи першого і четвертого приймачів з'єднані відповідно з першими входами першого і третього суматорів та блоків віднімання, вихід другого приймача з'єднаний з другими виходами і входами першого суматора та блока віднімання і з першими входами другого суматора та блока віднімання, вихід третього приймача з'єднаний з другими входами другого суматора та блока віднімання і з другими входами третього суматора та блока віднімання, вихід кожного з суматорів та блока віднімання підключений до входу відповідного амплітудного детектора, а виходи детекторів є виходами блока демодуляції сигналу, який відрізняється тим, що в нього введені три додаткові антени, три ідентичні приймачі, два фазових детектори та вісім аналого-цифрових перетворювачів, а блок логічної обробки виконаний у вигляді мікропроцесора, причому дві перші введені антени з базою між ними до
, чотири приймачі, з'єднані по входах з антенами, а по виходах - з блоком демодуляції сигналу, включаючі в себе три суматори, три блоки віднімання і шість амплітудних детекторів, та блок логічної обробки, причому виходи першого і четвертого приймачів з'єднані відповідно з першими входами першого і третього суматорів та блоків віднімання, вихід другого приймача з'єднаний з другими виходами і входами першого суматора та блока віднімання і з першими входами другого суматора та блока віднімання, вихід третього приймача з'єднаний з другими входами другого суматора та блока віднімання і з другими входами третього суматора та блока віднімання, вихід кожного з суматорів та блока віднімання підключений до входу відповідного амплітудного детектора, а виходи детекторів є виходами блока демодуляції сигналу, який відрізняється тим, що в нього введені три додаткові антени, три ідентичні приймачі, два фазових детектори та вісім аналого-цифрових перетворювачів, а блок логічної обробки виконаний у вигляді мікропроцесора, причому дві перші введені антени з базою між ними до ![]() розміщені посередині бази
розміщені посередині бази ![]() , а третя введена антена - на відстані до
, а третя введена антена - на відстані до ![]() від третьої антени на базі
від третьої антени на базі ![]() , виходи введених антен з'єднані з входами введених приймачів, а виходи перших двох введених приймачів з'єднані з входами першого фазового детектора, вихід третього введеного приймача з'єднаний з другим входом другого фазового детектора, перший вхід котрого з'єднаний з виходом третього приймача, виходи фазових детекторів та всіх шести амплітудних детекторів з'єднані відповідно з входами восьми аналого-цифрових перетворювачів, а їх виходи - з відповідними входами мікропроцесора, вихід якого є виходом радіопеленгатора.
, виходи введених антен з'єднані з входами введених приймачів, а виходи перших двох введених приймачів з'єднані з входами першого фазового детектора, вихід третього введеного приймача з'єднаний з другим входом другого фазового детектора, перший вхід котрого з'єднаний з виходом третього приймача, виходи фазових детекторів та всіх шести амплітудних детекторів з'єднані відповідно з входами восьми аналого-цифрових перетворювачів, а їх виходи - з відповідними входами мікропроцесора, вихід якого є виходом радіопеленгатора.
Текст
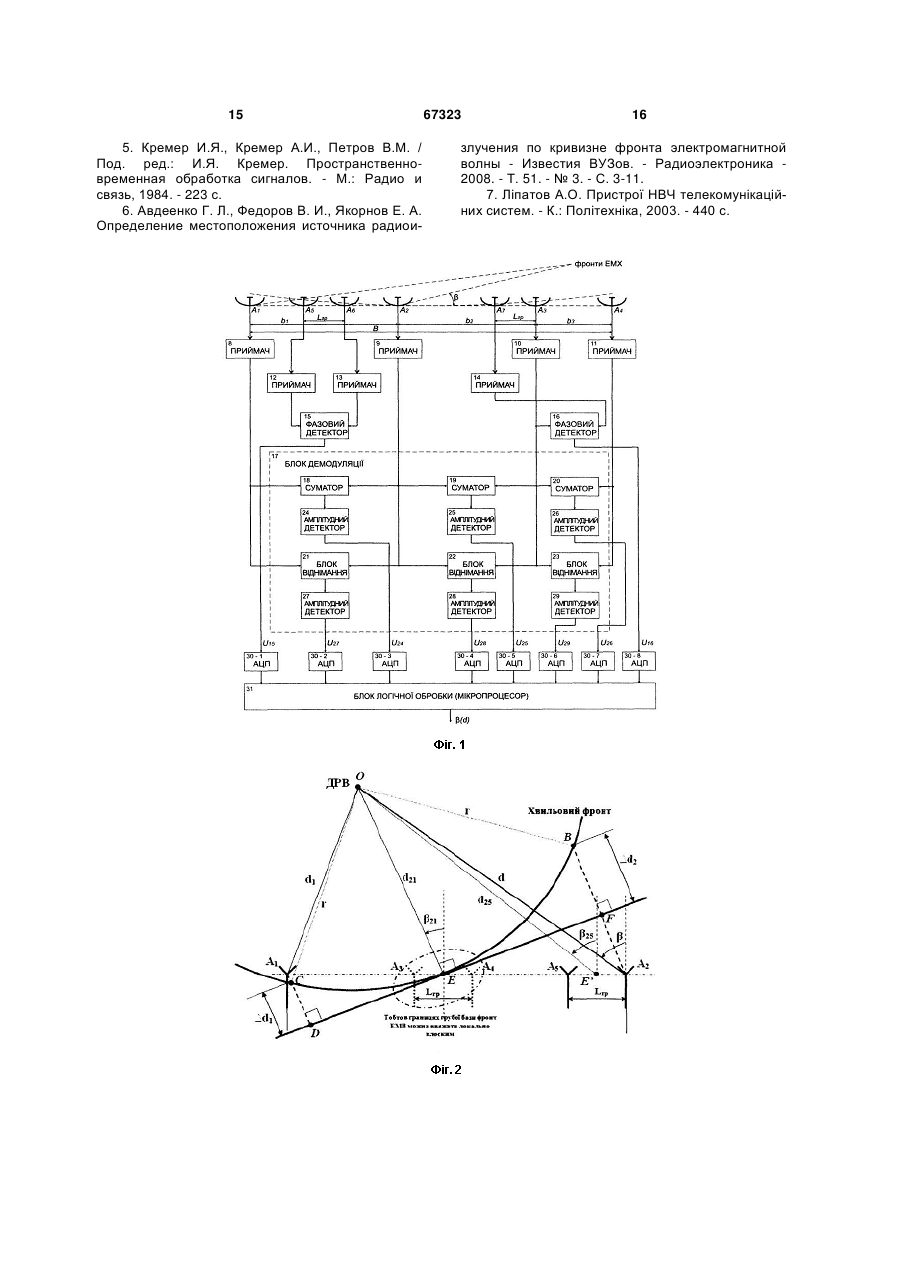
Фазовий радіопеленгатор, що містить чотири антени, розташовані в одній площині по прямій лінії з різницею довжин баз b1 b3 , що дорівнює 2 67323 1 3 характеристики котрих погіршуються, зокрема, спотворюються діаграми направленості та зменшуються вхідні опори антен. Ці недоліки усунені в патенті Російської Федерації [2], у якому при рознесені антен на відстань, яка суттєво перевищує робочу довжину хвилі, область однозначного вимірювання кута приходу площин електромагнітної хвилі (ЕМХ) знаходиться в межах -/2-/2 за рахунок використання не довжин хвиль баз, а різниці цих довжин. Для цього в ФРП, що містить в собі три антени, три ідентичних приймача, два фазометри, кожний з яких складається з ФД та фазообертача на 90°, веденні два додаткових ФД та блок логічної обробки сигналів. Основними недоліками даного аналога є помилки виміру пеленга, які пов'язані з дрейфом характеристик фазообертачів і невизначеності при виявленні джерела радіовипромінювання (ДРВ) із-за тангенсної пеленгаційної характеристики (ПХ), оскільки із-за непарності функції тангенса при розташуванні ДРВ на нульовому пелензі рівень ПХ на виході ФРП дорівнює нулю. Крім того, в граничній області величина знаменника ПХ приближається до нуля, що призводить до появи значних помилок вимірювання пеленга при додаванні до знаменника навіть малих шумів. Вказані недоліки усунені в патенті Російської Федерації [3] за рахунок введення додаткового четвертого антенно-приймального каналу і формування у блоці логічної обробки сигналів замість тангентної, синусної та косинусної ПХ. Однак при збільшенні розмірів баз в [2, 3] зростають помилки вимірювання пеленга, оскільки при певних співвідношеннях між базою, робочою довжиною хвилі і дальності до ДРВ фронт ЕМХ неможливо вважати локально плоским та необхідно враховувати його кривизну (сферичність). Цей недолік усунений в деклараційному патенті на корисну модель [4], виконаному на основі [2], шляхом введення двох однозначних баз [1] симетрично центральній антені. Однак, питання оптимального розміщення баз, особливо для визначення відстані по кривизні фронту ЕМХ, в [4] не розглядалося. Також не розглядалось питання усунення помилок пеленгації із-за тангенсної ПХ [2]. Найбільш близькою по технічній суті до запропонованого ФРП є патент [3]. Відомий ФРП, обраний в якості найближчого аналогу, містить чотири антени, розміщенні в одній площині по прямій лінії на відстанях (базах), мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, і з різницею довжин баз b1 b3 рівній b , де - середня довжина хвилі робо2 sin 0 чого діапазону пеленгатора, 0 - задана границя сектора однозначності визначення пеленга, а довb b3 жина бази b 2 визначається з умови b 2 1 , 2 чотири приймача, з'єднаних по входах з антенами, а по виходам - з блоком демодуляції сигналу, до складу якого входять три суматора, три блока віднімання і шість амплітудних детекторів (АД), та 67323 4 блок логічної обробки, причому виходи першого та четвертого приймачів з'єднані відповідно з першими входами першого і третього суматорів та блоків віднімання, вихід другого приймача з'єднані з другими входами першого суматора і блока віднімання та з першими входами другого суматора і блока віднімання, вихід третього приймача з'єднаний з другими входами другого суматора і блока віднімання та з другими входами третього суматора і блока віднімання, вихід кожного з суматорів та блоків віднімання підключений до входу відповідного АД, а виходи детекторів є виходами блока демодуляції сигналу. Основним недоліком наведеного найближчого аналогу є помилки вимірювання пеленга, пов'язані з неврахування кривизни фронту ЕМХ при розташування ДРВ в проміжній зоні (ПЗ) Френеля. Задачею, на вирішення якої спрямована корисна модель, є підвищення точності визначення пеленга при наявності кривизни фронту ЕМХ, а також вимірювання по кривизні фронту відстані до ДРВ для вказаної зони. Поставлена задача вирішується тим, що в ФРП, який містить чотири антени, розміщенні в одній площині по прямій лінії на базах, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, і з різницею довжин баз b1 b3 рівній b , де - середня до2 sin 0 вжина хвилі робочого діапазону пеленгатора, 0 задана границя сектора однозначності визначення пеленга, а довжина бази b 2 визначається з умови b b3 , чотири приймача, з'єднаних по вхоb2 1 2 дах з антенами, а по виходам - з блоком демодуляції сигналу, до складу якого входять три суматори, три блока віднімання та шість АД, і блок логічної обробки, причому виходи першого і четвертого приймачів з'єднані відповідно з першими входами першого і третього суматорів та блоків віднімання, вихід другого приймача з'єднаний з другими входами першого суматора і блока віднімання та з першими входами другого суматора і блока віднімання, вихід третього приймача з'єднаний з другими входами другого суматора та блока віднімання і з другими входами третього суматора та блока віднімання, вихід кожного з суматорів та блоків віднімання підключений до входу відповідного АД, а виходи детекторів є виходами блока демодуляції сигналу, в який також додатково введені три додаткових антени, три ідентичних приймача, два ФД та вісім аналого-цифрових перетворювачів (АЦП), а блок логічної обробки виконано у вигляді мікропроцесора, причому дві перші введенні антени, з базою між ними до / 2 , розташовані посередині бази b 2 , а третя введена антена на відстані до / 2 від третьої антени на базі b 2 , виходи введених антен з'єднані з входами введених приймачів, а виходи перших двох введених приймачів з'єднані з входами першого ФД, вихід третього введеного приймача з'єднаний з другим входом другого ФД, перший вхід якого з'єднаний з 5 виходом третього приймача, виходи ФД та всіх шести АД з'єднані відповідно з входами восьми АЦП, а їх виходи - з відповідними входами мікропроцесора, вихід котрого є виходом радіопеленгатора. Порівняльний аналіз з найближчим аналогом показує, що запропонований фазовий радіопеленгатор відрізняється наявністю нових блоків і нових зв'язків. У зв'язку з цим запропонований ФРП відповідає критерію корисної моделі "новизна". На фіг.1 наведена структурна схема ФРП; на фіг.2 зображена ліва частина фіг.1 АР ФРП, де штрихуванням позначено класичне [1] положення грубої, але однозначної шкали (база Lгр ), утвореної антенами А3 і А4 (на фіг.1 А5 та А6); на фіг.3 показані графіки залежності помилок гр21 в залежності від дальності d і пеленга ДРВ, відлічуваних від центральної антени А2 ФРП при b1 1000 і 0,03м ; на фіг.4 - помилки в кількості повних періодів фази несучої, що обумовлена "переносом" грубої шкали з центру бази b1 до її границі; на фіг.5 - помилки обчислення фазових зрушень, які обумовлені неправильно розрахованими k 21, k 42 ; на фіг.6 наведені графіки залежності помилки виміру дальності d1, d для випадку симетричного розміщення грубої шкали, а на фіг.7 - графіки залежності помилки виміру дальності d2 , d для випадку несиметричного розміщення грубої шкали від дальності й пеленга ДРВ. Підвищення точності визначення пеленга та вимірювання відстані до ДРВ для сферичного фронту ЕМХ в заявленому ФРП забезпечується за рахунок введення (повернення [1]) симетричних однозначних баз (шкал) визначення пеленга та зміною алгоритму обробки приймальних пеленгатором сигналів в мікропроцесорі. Фазовий радіопеленгатор (фіг.1) містить: чотири антени 1, 2, 3, 4, встановлені на одній лінії, перпендикулярній осям симетрії їх характеристик направленості, і на відстанях b1,b2 і b3 (базах) з довжин баз b1 b3 рівній , де - середня довжина хвилі робоb 2 sin 0 різницею чого діапазону пеленгатора, 0 - задана границя сектора однозначності пеленга, а довжина бази b b3 ; три антеb 2 визначається з умови b 2 1 2 ни 5, 6, 7 з розмірами баз bГР до / 2 між їх ФЦ для забезпечення однозначності вимірів та розташовані посередині бази b1 для А5, А6, а для антен А7, А3 - на відстані до / 2 от А3 на базі b 2 ; сім ідентичних приймача 8-14, причому коефіцієнт підсилення приймача 9 повинен бути в два рази, а приймача 10 в три рази більше від інших; два ФД 15, 16; блок демодуляції сигналу 17, що містить три високочастотних суматора 18, 19, 20, три високочастотних блоки віднімання 21, 22, 23 та шість АД 24-29; вісім АЦП 30.1-30.8 та мікропроцесор 31. 67323 6 Причому виходи антен А1, А2, А3, А4, A5, А6, А7 підключені до входів відповідних приймачів 8-14, виходи першого 8 та четвертого 11 приймачів з'єднані відповідно з першими входами першого 18, 21 і третього 20, 23 суматорів та блоків віднімання, вихід другого 9 приймача з'єднаний з другими входами першого суматора та блока віднімання 18, 21 і з першими входами другого суматора та блока віднімання 19, 22, вихід третього приймача 10 з'єднаний з другими входами другого суматора та блока віднімання 19, 22 і з другими входами третього суматора та блока віднімання 20, 23, вхід кожного з суматорів та блоків віднімання підключений до входу відповідного АД 24-29, а виходи детекторів є виходами блока демодуляції сигналу 17 і з'єднані з входами АЦП 30-2-30-7; виходи приймачів 12, 13 з'єднані з входами першого ФД 15; вихід приймача 14 з'єднаний з другим входом другого ФД16, перший вхід якого з'єднаний з виходом третього приймача 10; виходи ФД 15, 16 з'єднані відповідно з входами АЦП 30-1 і 30-8, а виходи АЦП 30-1-30-8 - з відповідними входами мікропроцесора 31, вихід якого є виходом пеленгатора. Радіопеленгатор працює таким чином. При дії фронту ЕМХ на виходах антен 1-7 (фіг.1) утворюються сигнали, які підсилюються приймачами 8-14, перетворюються за допомогою блока демодуляції 17 і ФД 15, 16 в напруги, що несуть інформацію про пеленг на ДРВ, а також відстань d при наявності кривизни фронту ЕМХ та надходять після АЦП 30-1-30-8 в цифровому вигляді у мікропроцесор 31. В мікропроцесорі 31 на першому етапі на відміну від найближчого аналогу введена обов'язкова процедура перевірки приймальних сигналів на сферичність фронту ЕМХ, оскільки при знаходженні ДРВ в ПЗ (зоні Френеля) на відстанях від ФЦ розрідженої лінійної антенної решітки (АР) d 2B 2 cos2 / , де B b1 b2 b3 - максима льний габарит АР (фіг.1) [5] за рахунок наявності кривизни фронту виникає помилка визначення пеленга тим більша, чим ближче ДРВ до пеленгатору (див. фіг.2 і табл. 1 в [4]). Процедуру перевірки зручніше провести, проаналізувавши різниці фаз між першою А1 і другою А2 21 повн , другою А2 і четвертою А4 42повн парами антен при плоскому хвильовому фронті з урахуванням відмінності в базах b . b1 b 21повн 42повн 41повн 1 (1) b 2 b3 B , Оскільки в більшості практичних випадків розміри баз b1 та b2 b3 набагато перевищують половину довжини робочої хвилі, то при вимірюванні повних фазових зсувів 21 повн та 42повн для перевірки умови (1) виникає неоднозначність оцінки цих фазових зсувів. Усунення даної проблеми здійснюється шляхом використання відомого способу [1], а саме введенням в ФРП декількох пар антен з базою / 2 , тобто застосу 7 67323 ванням грубих, але однозначних шкал виміру фазових зсувів. Тоді, згідно [4] отримаємо, що (2) 21 повн 21 вим 2k 21 , 42повн 42вим 2k 42 , (3) де 21 вим, 42вим - фазові зсуви, що виміряні між антенами А1 і А2, А2 і А4 (тобто на базах b1 та b2 b3 ); k 21, k 42 - кількість періодів фази, що втрачені при вимірюванні, і які відповідно дорівнюють k 21 1 b1 65ГР 21 вим , 2 LГР (4) k 42 1 b 2 b3 37ГР 42вим , L 2 ГР 8 відповідними однозначними базами LГР / 2 (фіг.1), де - операція округлення до найближчого цілого значення. Визначення 21 вим та 42вим виконується у мікропроцесорі 31 з напруг для косинусних та синусних ПХ, які відповідно також як і в пеленгаторі, наведеному в найближчому аналізі для плоского фронту ЕМХ знаходяться з виразів b b3 (6) F C,2C FC cos 1 sin , 1 2 (5) b b3 F1S,2S FS sin 1 sin , 2 (7) У виразах (4), (5) 65ГР , 37ГР - фазові зсуви, виміряні ФД 15, 16 по напругам U15, U16 за де FC F1C при U25 U28 ; або FC F2C при U25 U28 ; FS F1S при U25 U28 ; або FS F2S при U25 U28 ; F1C U24 U26 ; U25 F1S U24 U26 ; U25 F2C U27 U29 ; U25 F2S U29 U27 ; U25 b b b U24 2U0 sin 1 sin ; U25 2U0 sin 2 sin ; U26 2U0 sin 3 sin ; b3 b1 b2 U27 2U0 cos sin ; U28 2U0 cos sin ; U29 2U0 cos sin ; U24 U29 - напруги на виходах АД 24-29; U0 - напруги на виходах приймачів 8-11. При цьому в алгоритмі, закладеному в мікропроцесорі 31, передбачається, що ПХ, яка має високу крутизну F1S,2S забезпечує хорошу точність вимірювання пеленга, а інша ПХ, яка в цей час має високий рівень F1C,2C дозволяє з ве ликою ймовірністю визначити наявність або відсутність ДРВ. При появі кривизни фронту ЕМХ (фіг.2) умова (1) порушується і визначення пеленга за виразами (6), (7) буде проводитися з помилками. Проаналізуємо характер цих помилок і їх величину в залежності від розташування баз Lгр в АР з метою можливої оптимізації (зменшення) кількості функціонально необхідних елементів ФРП для визначення пеленга й дальності при наявності кривизни фронту ЕМХ. Розглянемо як зміниться точність визначення координат ДРВ, що знаходиться в зоні Френеля ФРП, якщо грубу шкалу перемістити до центрального антенного елемента А2 ФРП, тобто скористатися грубою шкалою, сформованої антенними елементами А2 і А5, як показано на фіг.2. Вважаючи хвильовий фронт у межах грубої, але однозначної бази, локально плоским, фазовий зсув при класичній побудові шкал пеленгатора (шкала між А3 і А4) 2L гр sin 21, d (8) , гр21, d а фазовий зсув при "оптимальній" схемі формування грубої шкали (шкала А2 і А5) 2L гр sin 25 , d (9) гр25 , d , Раніше [6] було показано, що для зони Френеля справедливі розкладання b 2 cos 2 21 b , d1 d 2 d 21b1 sin 21 0,5b1 2 d 21 1 sin 21 1 21 2 8d 21 (10) 9 67323 10 b 2 cos 2 21 b d d 2 db1 sin 21 0,5b1 2 d 21 1 sin 21 1 , 21 2 8d 21 Тоді істинне фазове зсув між елементами А1 та А2 2d d1 2b1 sin21, d , 21, d (12) На фіг.2 показана також апроксимація сферичного хвильового фронту на базі b1 плоским хвильовим фронтом, симетричним відносно як бази b1 , так і бази Lгр , при цьому ОС = ОВ = r. Оскільки точка Е - центр бази b1 , a також враховуючи, що DE=EF і ОЕ перпендикулярні до DF, можна стверджувати, що CD BF d1 d2 ; тобто помилки в різницях ходу ЕМХ при апроксимації сферичного фронту плоским однакові, звідси можна стверджувати, що фазове зрушення між сусідніми антенними елементами (у цьому випадку, це А1 і А2) не залежить від дальності d21 до ДРВ, відлічуваної відносно центра бази L21 (і відповідно грубої бази А3 і А4), оскільки через рівність різниць ходу ЕМХ d1 d2 відбувається компенсація квадратичних і більш високого порядку фазових набігів при обчисленні різниці фаз сигналів між А1 і А2, які й спричиняють кривизну фронту. гр21, d гр21, d гр25 , d sin21 , d d2 d2 cos2 21 d2 21 Однак зазначене фазове зрушення лінійно залежить від пеленга 21 , що повинен відлічуватися від центра бази. Таким чином, у цьому випадку вплив сферичного хвильового фронту повністю еквівалентний дії плоского, що надходить не з напрямку , а з напрямку 21 , який у свою чергу залежить від реальних пеленга й дальності d до ДРВ. Аналогічна апроксимація сферичного хвильового фронту плоским хвильовим фронтом несиметрична відносно бази b1 , але симетрична відносно бази антен А2 і А5 показує, що d1 d2 , тобто не відбувається повна компенсація квадратичних фазових набігів і набігів більш високого порядку. І тому така апроксимація сферичного фронту плоским некоректна, оскільки приводить до помилки при обчисленні фазового зрушення. Очевидно, що помилка в обчисленні фазового зсуву на грубій шкалі, утвореної антенами А2 і А5 (несиметрична груба шкала) відносно грубої шкали, утвореної антенами А3 і А4 (симетрична груба шкала) може бути оцінена по формулі 2LГР sin21, d sin25 , d)) , Для знаходження виразу для першого синуса в (13) з трикутника ОА2Е (фіг.2) отримаємо, що d21 d2 db1 sin 0,5b12 , і скористаємось теоремою синусів (11) (14) (13) d21 d . sin90 sin90 21 Звідси cos 21 0,5b12 d2 sin 2 b1d sin , 0,5b12 d2 b1d sin d cos , d21 (15) Аналогічно з трикутника ОА2Е, отримаємо sin25 , d d2 d2 cos2 25 d2 25 0,5LГР 2 d2 sin2 LГР d sin 0,5LГР 2 d2 LГР d sin Відповідно до виразів (13) - (16) на фіг.3 показані графіки залежності помилок гр21 в залежності від дальності d і пеленга ДРВ, відлічуваних від центральної антени ФРП при b1 1000 і 0,03м . Із графіків на фіг.3 видно, що в міру того, як збільшується дальність до ДРВ і хвильовий фронт зі сферичного поступово перетворюється в плоский, помилка обчислення фазового зсуву зменшується, наближуючись до нуля. Розглянемо потенційні помилки при вимірюванні фазових зрушень за рахунок втрачених пов , (16) них періодів фази несучого коливання. Очевидно, що згідно з (2) при використанні симетричної грубої шкали A3, A4 (фіг.2) справедливі співвідношення: 21 СИМ , d 21 вим , d 2k 21 СИМ , d ,(17) 21СИМ , d b1 гр21, d , (18) LГР де 21 вим , d - фазовий зсув сигналу, виміряний між антенами А2 і А1 відповідно, a k 21 СИМ , d - коефіцієнт, що враховує кількість втрачених повних періодів фази несучого коливання. 11 67323 Вираз для цього коефіцієнта згідно з (4) та (17) k 21СИМ , d 12 матиме вигляд 1 L 21 гр21, d 21 вим , d , 2 LГР (19) При використанні несиметричної грубої шкали А2, А5 (фіг.2) можна аналогічно до (17) записати 21 НЕСИМ , d 21 вим , d 2k 21 НЕСИМ , d , 21 НЕСИМ , d k 21 НЕСИМ , d b1 гр25 , d , LГР (21) (20) звідки кількість втрачених повних періодів фази несучого коливання 1 b1 гр25 , d 21 вим , d , 2 LГР Враховуючи, що 21НЕСИМ, d 21СИМ, d , помилка в кількості повних періодів фази несучої, k 21, d k 21СИМ , d k 21 НЕСИМ , d (22) що обумовлена "переносом" грубої шкали з центру бази b1 до її границі, дорівнюватиме 1 b1 гр21, d , 2 LГР Із графіків на фіг.4, побудованих за (23) при L 21 1000 і 0,03м , видно, що характер графіків збігається із графіками на фіг.3, тобто, у міру того, як збільшується дальність до ДРВ і хвильовий фронт зі сферичного поступово перетворюється в плоский, помилка обчислення фазового зрушення й помилка кількості загублених повних періодів зводяться на ні, наближуючись до нуля. Результати аналогічного проведеному вище аналізу помилок для правої частини (фіг.1) АР ФРП ідентичні. Помилка вимірювання пеленга для несиметричних грубих шкал ФРП (24) , d 1, d , де - дійсний пеленг ДРВ, 1, d - пеленг ДРВ, розрахований з врахуванням помилок в повних фазових зсувах поміж відповідними елементами ФРП, тобто 2 2 42несим, db1 21несим, db 2 b 3 , 1, d arcsin 2b1b1 b 3 B Помилка вимірювання дальності між дійсним d і розрахованим d1, d значенням дальності до ДРВ при використанні симетричних грубих шкал d1, d d d1, d , d2 , d d d2 , d (28) де d2 , d обчислюється так само, як й (27), але необхідно змінити 21 сим на 21 несим, а 42сим на 42несим. З фіг.5 видно, що помилки обчислення фазових зрушень (які обумовлені неправильно розра (25) (26) де 2 42b2 b2 b3 2 B2 2 42сим, db2 21сим, db2 b3 2 1 1 , d1, d 2 4b2 b3 B 42сим, db 21сим, db1b2 b3 1 Аналогічно, помилка вимірювання дальності при використанні несиметричних грубих шкал (23) (27) хованими k 21, k 42 ) для несиметричної шкали не впливають на точність обчислення пеленга ДРВ. На наш погляд, це можна пояснити різнополярним характером зміни помилок k 21, d і k 42 , d , що у свою чергу веде до їхньої взаємної компенсації під знаком арксинуса у формулі (25). На фіг.6 наведені відповідно графіки залежності помилки виміру дальності d1, d для випадку симетричного розміщення грубої шкали, з якого видно, що 13 67323 помилка виміру дальності дуже мала, практично дорівнює нулю. На фіг.7 показані графіки залежності помилки виміру дальності d2 , d для випадку несиметричного розміщення грубої шкали від дальності й пеленга ДРВ, з якого видно, що помилка виміру d дуже велика, але починаючи з деякого значення критичного значення d , що залежить від , помилка виміру дальності різко падає до нуля. Таким чином, результати математичного моделювання показують, що для зони Френеля несиметричне розміщення грубих баз для мінімізації числа задіяних антен і вимірювального устаткування дозволяє практично без помилок визначати при наявності кривизни фронту ЕМХ пеленг, що й 14 реалізовано у [4]. Але для виміру дальності по кривизні помилки мінімальні тільки при симетричному розташуванні баз. Тому для виміру дальності будемо використовувати класичну [1] симетричну схему розміщення грубих, але однозначних баз усередині точних (фіг.1), причому для мінімізації кількості антено-приймальних каналів в правій частині АР для створення другої грубої шкали використовується вже наявний третій антеноприймальний канал (А3 - приймач 10). Отже, для випадку симетричного розміщення грубих баз здійснюється перевірка рівності (1) і, якщо воно не виконується, то визначення пеленга й дальності по кривизні фронту ЕМХ здійснюється по наступним співвідношенням 2 2 21повнb1 42повн b 2 b3 arcsin , 2Bb1b 2 b3 d (29) 2 4 2b 2 b 2 b 3 2 B 2 2 42повнb 2 21 повн b 2 b 3 1 1 4b 2 b 3 B 42повнb 2 21 повнb1b 2 b 3 1 де 21 повн і 42повн визначається у мікропроцесорі 31 за співвідношеннями (2) - (5), причому 21 вим знаходиться з напруг U24, U27 як U24 1 tg 21 вим , звідки U27 2 U24 , а 42вим - по зсувам 21 вим 2arctg U 27 фаз на базах b 2 і b3 з наступних напруг U24 U26 1 tg 42вим , звідки U27 U29 4 U24 U26 42вим 4arctg U U . 29 27 Останнє обумовлене тим, що арктангенс - непарна функція, і з цього випливає, що вже на грубій базі дозволяє визначити "полярність" пеленга (позитивний чи негативний), що неможливо отримати з косинусних функцій U27, U28, U29 . Принципові відмінності запропонованого ФРП полягають у вдосконалюванні обробки сигналів при більш високих характеристиках щодо точності визначення пеленга при наявності сферичності фронту ЕМХ, а також можливості визначення відстані до ДРВ для ПЗ. Розглянемо варіанти схемної реалізації основних елементів запропонованого ФРП. У якості антен 1-4 можливо використовувати гостроспрямовані антени, наприклад, параболічні антени, розташовані в одній площині по прямій лінії на відстанях, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен і може складати одиниці або десятки довжин хвиль, а антен 5-7 - ненаправлені з умов мінімізації взає 2 , (30) много впливу антен, а саме: спотворень їх діаграм направленості та зменшення вхідних опорів. Приймача 8-14 - стандартні підсилювачі високої частоти. В якості ФД 15, 16 як і в пеленгаторі - найближчому аналізі [3] можуть бути використанні перемножувачі напруг. В якості суматорів 18-20 та блоків віднімання 21-23 блока демодуляції 17 можуть бути використанні синфазно-противофазні мости [7] (див. там же й опис АД 24-29). АЦП 30-1 - 30-8 і мікропроцесор 31 зі спеціальним програмним забезпеченням є стандартними цифровими пристроями і підбираються окремо під параметри пеленгатора. Проведений аналіз відомих технічних рішень у даній галузі техніки показав, що сукупність ознак, яка відрізняє корисну модель від найближчого аналога, не була виявлена, отже фазовий радіопеленгатор, що заявляється, має істотні відмінності. Джерела інформації: 1. Теоретические основы радиолокации. / Под ред. Ширмана Я.Д. Учеб. пособие для вузов. - М.: Сов. Радио, 1970. - аналог. 2. Патент № 2138061 (Россия) Фазовый радиопеленгатор. М. кл. G01S3/48, //Беспалов Е.С., Кургин В.В. БИ, 1999 г., № 26 - аналог. 3. Патент № 2169377 (Россия) Фазовый радиопеленгатор. М. кл. G01S3/46, 3/48, //Беспалов Е. С., Кургин В.В. БИ, 2001 г., № 17 - найближчий аналог. 4. Деклараційний патент на корисну модель № 57200 (Україна). Фазовий радіопеленгатор. М. кл. G01S3/00 // Авдеенко Г.Л., Ліпчевська І.Л., Якорнов Є.А. та інш. Пром. власність, 2011 р., № 3. - аналог 15 5. Кремер И.Я., Кремер А.И., Петров В.М. / Под. ред.: И.Я. Кремер. Пространственновременная обработка сигналов. - М.: Радио и связь, 1984. - 223 с. 6. Авдеенко Г. Л., Федоров В. И., Якорнов Е. А. Определение местоположения источника радиои 67323 16 злучения по кривизне фронта электромагнитной волны - Известия ВУЗов. - Радиоэлектроника 2008. - Т. 51. - № 3. - С. 3-11. 7. Ліпатов А.О. Пристрої НВЧ телекомунікаційних систем. - К.: Політехніка, 2003. - 440 с. 17 67323 18 19 Комп’ютерна верстка Л. Ціхановська 67323 Підписне 20 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPhase radio direction finder
Автори англійськоюAvdeenko Hlib Leonidovych, Budilovskyi Oleksandr Viktorovych, Ilchenko Mykhailo Yukhymovych, Lipchevskaya Inna Leonidivna, Yakornov Yevhenii Arkadiiovych
Назва патенту російськоюФазовый радиопеленгатор
Автори російськоюАвдеенко Глеб Леонидович, Будиловский Александр Викторович, Ильченко Михаил Ефимович, Липчевская Инна Леонидовна, Якорнов Евгений Аркадиевич
МПК / Мітки
МПК: G01S 3/48
Мітки: фазовий, радіопеленгатор
Код посилання
<a href="https://ua.patents.su/10-67323-fazovijj-radiopelengator.html" target="_blank" rel="follow" title="База патентів України">Фазовий радіопеленгатор</a>
Фазовий радіопеленгатор
Номер патенту: 56430
Опубліковано: 10.01.2011
Автори: Авдєєнко Гліб Леонідович, Сторубльов Олександр Іванович, Карпенко Борис Олексійович, Якорнов Євгеній Аркадійович, Ліпчевська Ірина Леонідівна
Мітки: фазовий, радіопеленгатор
Формула / Реферат:
Фазовий радіопеленгатор, що містить: три антени, розташовані в одній площині по прямій лінії на відстанях (базах), мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, і з різницею довжин баз між ними, рівною , де - середня довжина хвилі робочого діапазону пеленгатора,
Фазовий радіопеленгатор
Номер патенту: 57200
Опубліковано: 10.02.2011
Автори: Якорнов Євгеній Аркадійович, Коломицев Максим Олександрович, Ільченко Михайло Юхимович, Ліпчевська Інна Леонідівна, Авдєєнко Гліб Леонідович
МПК: G01S 3/00
Мітки: фазовий, радіопеленгатор
Формула / Реферат:
Фазовий радіопеленгатор що містить: три антени, розміщені в одній площині по прямій лінії на неоднозначних базах, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, та з різницею довжин баз між ними, рівною , де λ середня довжина хвилі робочого діапазону пеленгатора, α0 - задана границя сектора однозначності визначення пеленга; три...
Широкосмуговий фазовий радіопеленгатор
Номер патенту: 64705
Опубліковано: 10.11.2011
Автори: Авдєєнко Гліб Леонідович, Ліпчевська Інна Леонідівна, Охріменко Ярослав Юрійович, Ільченко Михайло Юхимович, Якорнов Євгеній Аркадійович
МПК: G01S 3/00
Мітки: радіопеленгатор, широкосмуговий, фазовий
Формула / Реферат:
Широкосмуговий фазовий радіопеленгатор, що містить три антени, які розміщені в одній площині по прямій лінії на неоднозначних базах, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен та з різницею довжин баз між ними, рівною , де - середня довжина хвилі робочого діапазону...
Фазовий виявляч цілі
Номер патенту: 43958
Опубліковано: 15.01.2002
Автори: Стахєєв Микола Олександрович, Карлов Володимир Дмитрович, Коваль Олександр Андрійович, Челпанов Володимир Валентинович
МПК: G01S 13/52
Формула / Реферат:
Фазовий виявляч цілі, що має у своєму складі вузол режекції завад, який відрізняється тим, що до його складу додатково введені послідовно з'єднані когерентний компенсатор і виявляч цілі, при цьому когерентний компенсатор містить два блоки аналізу завад, входи яких підключені відповідно до виходів оперативно-запам'ятовуючих пристроїв вузла режекції завад, два блоки віднімання, перші входи яких з'єднані з виходами відповідних блоків аналізу...
Фазовий модулятор
Номер патенту: 83668
Опубліковано: 11.08.2008
Автори: Долгін Володимир Прохорович, Долгін Ігор Володимирович
МПК: H04L 27/18, H04L 27/20
Формула / Реферат:
Фазовий модулятор, що містить послідовно з'єднані вхідний суматор (1), перемножувач (2), проміжний суматор (3), елемент затримки (4) та компаратор (5), який відрізняється тим, що два входи вхідного суматора (1) є входами сигналу несучої частоти, а третій його вхід є входом інверсного сигналу і з'єднаний з виходом елемента затримки (4), при цьому другий вхід перемножувача (2) є входом вхідного сигналу X, другий вхід проміжного суматора...
Попередній патент: Спосіб коронарного шунтування дифузно ураженої по всій довжині правої коронарної артерії у хворих ішемічною хворобою серця із супутнім цукровим діабетом 2 типу
Наступний патент: Пристрій для розмітки лазерним випромінюванням
Випадковий патент: Спосіб діагностики реплікативних безсимптомних форм цитомегаловірусної інфекції у віл-інфікованих жінок репродуктивного віку, вагітних та новонароджених дітей