Фазовий радіопеленгатор
Номер патенту: 57200
Опубліковано: 10.02.2011
Автори: Ільченко Михайло Юхимович, Авдєєнко Гліб Леонідович, Ліпчевська Інна Леонідівна, Якорнов Євгеній Аркадійович, Коломицев Максим Олександрович

Формула / Реферат
Фазовий радіопеленгатор що містить: три антени, розміщені в одній площині по прямій лінії на неоднозначних базах, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, та з різницею довжин баз між ними, рівною ![]() , де λ середня довжина хвилі робочого діапазону пеленгатора, α0 - задана границя сектора однозначності визначення пеленга; три ідентичних приймачі; два фазометри, кожний з яких складається з фазового детектора і фазообертача на 90°, третій та четвертий фазові детектори та блок логічної обробки, причому виходи антен підключені до входів відповідних приймачів, виходи першого и третього приймачів з'єднані з першими входами фазометрів та з першими входами третього та четвертого фазових детекторів, вихід другого приймача з'єднаний з другими входами фазометрів та другими входами третього и четвертого фазових детекторів, який відрізняється тим, що у нього введені дві додаткові антени відносно центральної з однозначними базами розміром до λ/2, два приймачі, п'ятий й шостий фазові детектори та шість аналого-цифрових перетворювачів, а блок логічної обробки виконаний у вигляді мікропроцесора, причому виходи введених антен з'єднані зі входами введених приймачів, а їх виходи з першими входами п'ятого та шостого фазових детекторів, другі входи яких з'єднані з виходом другого приймача, виходи всіх шести фазових детекторів з'єднані відповідно зі входами шести аналого-цифрових перетворювачів, а їх виходи з відповідними входами мікропроцесора, вихід якого є виходом пеленгатора.
, де λ середня довжина хвилі робочого діапазону пеленгатора, α0 - задана границя сектора однозначності визначення пеленга; три ідентичних приймачі; два фазометри, кожний з яких складається з фазового детектора і фазообертача на 90°, третій та четвертий фазові детектори та блок логічної обробки, причому виходи антен підключені до входів відповідних приймачів, виходи першого и третього приймачів з'єднані з першими входами фазометрів та з першими входами третього та четвертого фазових детекторів, вихід другого приймача з'єднаний з другими входами фазометрів та другими входами третього и четвертого фазових детекторів, який відрізняється тим, що у нього введені дві додаткові антени відносно центральної з однозначними базами розміром до λ/2, два приймачі, п'ятий й шостий фазові детектори та шість аналого-цифрових перетворювачів, а блок логічної обробки виконаний у вигляді мікропроцесора, причому виходи введених антен з'єднані зі входами введених приймачів, а їх виходи з першими входами п'ятого та шостого фазових детекторів, другі входи яких з'єднані з виходом другого приймача, виходи всіх шести фазових детекторів з'єднані відповідно зі входами шести аналого-цифрових перетворювачів, а їх виходи з відповідними входами мікропроцесора, вихід якого є виходом пеленгатора.
Текст
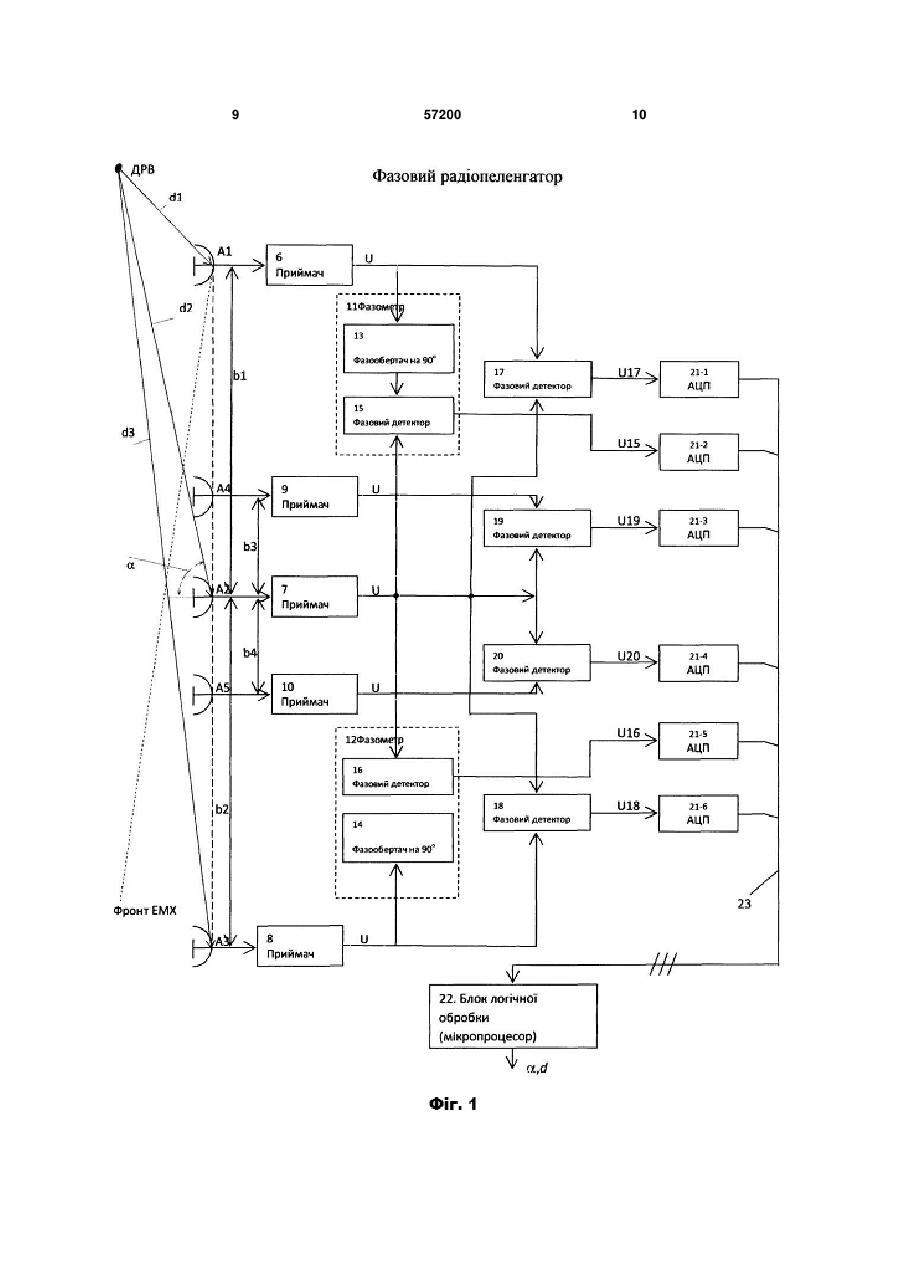
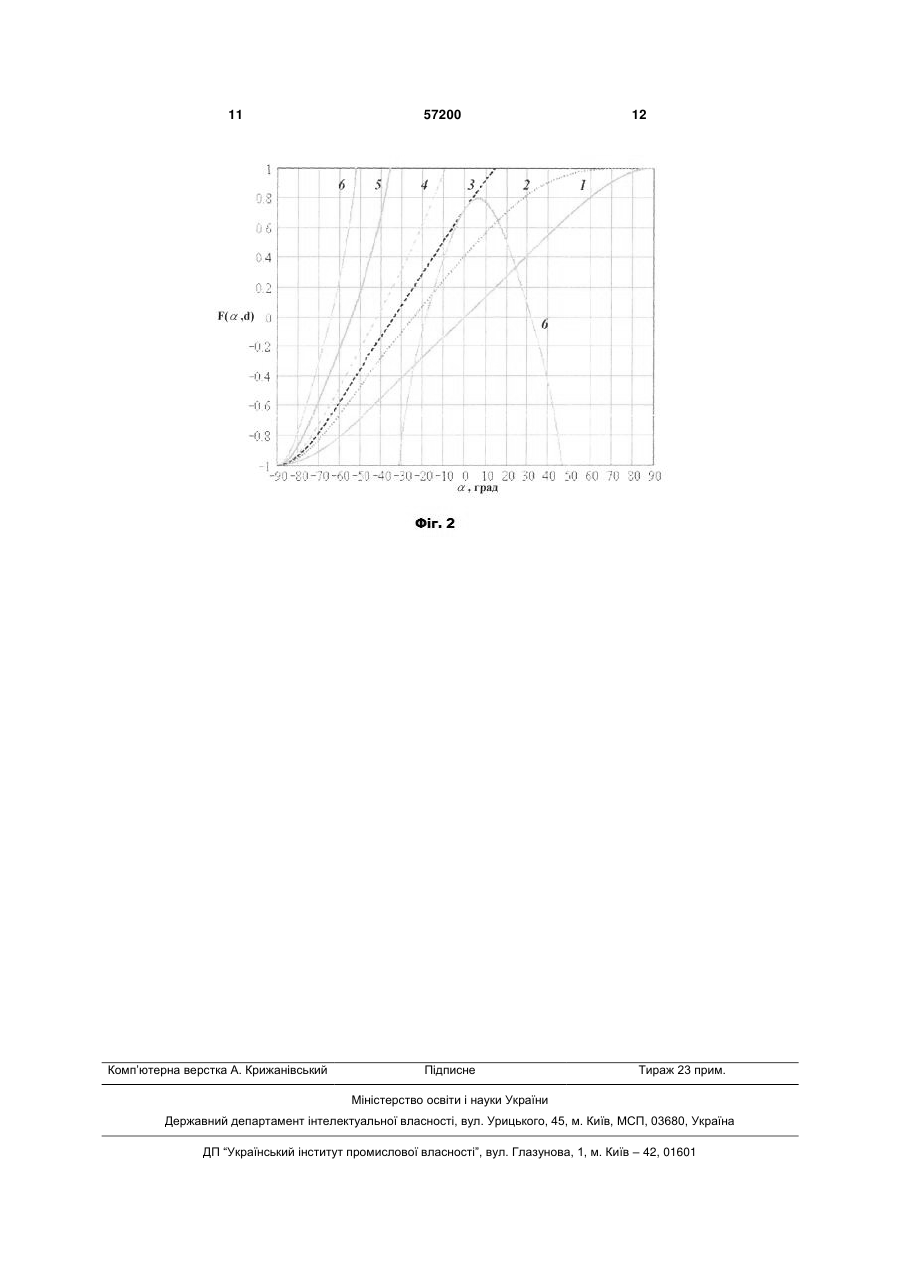
Фазовий радіопеленгатор що містить: три антени, розміщені в одній площині по прямій лінії на неоднозначних базах, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, та з різницею довжин баз між ними, рівною , де середня довжина хвилі робочоb 4 sin 0 2 (19) 1 3 плоскої електромагнітної хвилі (ЕМХ) знаходиться в межах від / 2 до / 2 за рахунок використання не довжин баз, а різниці їх довжин. Для цього у ФРП, що містить три антени, три ідентичні приймачі, два фазометри, що складаються кожен з ФД і фазообертача на 90, введені два додаткових ФД і блок логічної обробки сигналів. Проте при збільшенні розмірів баз зростають помилки виміру пеленга, оскільки при певних співвідношеннях між базою, робочою довжиною хвилі і дальністю до джерела радіовипромінювання (ДРВ) фронт ЕМХ не можна вважати локально плоским і необхідно враховувати його кривизну (сферичність). Найбільш близькою по технічній суті до запропонованого ФРП є патент [3]. Відомий ФРП, обраний в якості найближчого аналога, містить три антени, розташовані в одній площині по прямій лінії на відстанях (базах), мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, і з різницею довжин неоднозначних баз між ними рівною b , де середня довжина 4 sin 0 хвилі робочого діапазону пеленгатора, 0 - задана границя сектора однозначності виміру пеленга, три ідентичні приймачі, два фазометри, кожен з яких складається з ФД і фазообертача на 90, третій і четвертий ФД і блок логічної обробки, причому виходи антен підключені до входів відповідних приймачів, виходи першого і третього приймачів сполучені з першими входами фазометрів і першими входами третього і четвертого ФД. Основним недоліком найближчого аналога є помилки виміру пеленга, зв'язані з не врахуванням кривизни фронту ЕМХ хвилі при знаходженні ДРВ в проміжній зоні (ПЗ) (зоні Френеля). Задачею, на вирішення якої спрямований винахід, є визначення пеленга за наявності кривизни фронту ЕМХ, а також вимір по кривизні фронту дальності до ДРВ для вказаної зони. Поставлена задача вирішується наступним чином: в ФРП що містить три антени, розташовані в одній площині по прямій лінії на відстанях (базах), мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, і з різницею довжин неоднозначних баз між ними рівною b , три ідентичні приймачі, два фазометри, кожен з яких складається з ФД і фазообертача на 90, третій і четвертий ФД і блок логічної обробки, причому виходи антен підключені до входів відповідних приймачів, виходи першого і третього приймачів сполучені з першими входами фазометрів і першими входами третього і четвертого ФД, вихід другого приймача сполучений з другими входами фазометрів і другими входами третього і четвертого ФД, в нього введено дві додаткові антени на відстанях відносно центральної до /2, два приймачі, п'ятий і шостий ФД і шість аналого-цифрових перетворювачів (АЦП), а блок логічної обробки виконаний у вигляді мікропроцесора, причому виходи введених антен сполучені з входами введених приймачів, а їх виходи з першими входами п'ятого і шостого ФД, другі входи яких сполучені з виходом другого приймача, виходи всіх шести ФД 57200 4 сполучені відповідно з входами шести АЦП, а їх виходи - з відповідними входами мікропроцесора, вихід якого є виходом пеленгатора. Порівняльний аналіз з найближчим аналогом показує, що запропонований фазовий радіопеленгатор відрізняється наявністю нових блоків і нових зв'язків. У зв'язку з цим запропонований ФРП відповідає критерію корисної моделі «новизна». На Фіг.1 наведена структурна схема ФРП, а на Фіг.2 - його пеленгаційні характеристики (ПХ) в залежності від дальності до ДРВ. Підвищення точності визначення пеленга і виміру дальності до ДРВ для сферичного фронту ЕМХ в заявленому ФРП забезпечується за рахунок введення [1] однозначних шкал визначення пеленга і зміни алгоритму обробки сигналів, що приймаються пеленгатором, в мікропроцесорі. Фазовий радіопеленгатор (Фіг.1) містить: три антени А1, А2, A3, встановлені на одній лінії, перпендикулярній осям симетрії їх характеристик направленості, і на неоднозначних базах b1 та b 2 , що відрізняються на величину b , з мінімальними довжинами баз, обмеженими допустимим рівнем взаємного впливу антен; дві антени А4, А5 з розмірами бази між ФЦ відносно антени А2, що, для забезпечення однозначності, не перевищує вимірів половини робочої довжини хвилі; п'ять ідентичних приймачів 6-10; два фазометри 11, 12, у складі яких фазообертачі на 90 13, 14 і ФД 15, 16; третій і четвертий ФД 17, 18; п'ятий і шостий ФД 19, 20; шість АЦП 21.1-21.6 і мікропроцесор 22 з вхідною шиною 23. Причому виходи антен А1, А2, A3 А4, А5 підключені до входів відповідних приймачів 6-10, виходи першого і третього приймачів сполучені з першими входами фазометрів 11, 12 і з першими входами третього і четвертого ФД 17, 18, вихід другого приймача 7 сполучений з другими входами фазометрів 11, 12 і другими входами ФД 17-20, виходи приймачів 9,10 сполучені з першими входами п'ятого і шостого ФД; виходи всіх шести ФД 15-20 сполучені відповідно з входами шести АЦП 21.1-21.6, а їх виходи сполучені шиною 23 з відповідними входами мікропроцесора 22, вихід якого є виходом пеленгатора. Радіопеленгатор працює наступним чином. При дії фронту ЕМХ на виходах антен А1-А5 утворюються сигнали, які посилюються приймачами 610, перетворюються за допомогою ФД 17-20 в напругу, що несе інформацію про пеленг ( ) на ДРВ (а також дальності ( d ) за наявності кривизни фронту ЕМХ) і поступають після АЦП 21.1-21.6 в цифровому вигляді по шині 23 в мікропроцесор 22. У мікропроцесорі 22 на першому етапі на відміну від найближчого аналога введена обов'язкова процедура перевірки сигналів, що приймаються, на кривизну (сферичність) фронту ЕМХ, оскільки при знаходженні ДРВ в проміжній зоні (ПЗ) на відстанях від ФЦ антенної системи (AC) d (2B2 cos2 ) / , де B b1 b2 - максимальний розмір лінійного розкриву АС (Фіг.1) в площині якої розглядається ПЗ [4], в ПЗ за рахунок наявності кривизни фронту виникає помилка визначення пеленга тим більша, чим ближче ДРВ до пеленга 5 57200 тора (див. Фіг.2 і таблиця 1, де 1, 2 - пеленгаційна характеристика (ПХ) прототипу для дальньої зоні 6 (ДЗ), а 3-6 для ПЗ). Таблиця 1 Параметри 10 dДЗ 1 № кривої f = 10ГГц, b1 = 1000 = 30м, b2=1000, 25 =30,008 м Відстань, d(dДЗ 240км, = 0°) dДЗ 150 км 100 км 50 км 2 3 4 5 ПХ для ДЗ визначається так як і в пеленгаторі найближчому аналогу по співвідношенню (b2 b1) F1,2 ( ) F( ) tg sin (1) де F( ) F1( ) U17 U18 U15 U16 ; при U16 U15 ; U17 U18 aбо F( ) F2 ( ) F1() F2 () U15 при U17 U18 U15 U16 ; U17 U18 ; U15 U16 2b1 2b2 U17 U cos sin ; U18 U cos sin ; U15, U16, U17, U18 - напруга на виходах ФД 15 18; U - напруги на виходах ідентичних приймачів 6, 7, 8, (а також 9, 10); b1 , b 2 - неоднозначні бази (Фіг.1) для усунення яких береться різниця баз, що визначається різницею довжин неоднозначних баз b 4 sin 0 (при b / 4 границя сектора однозначності виміру пеленга в межах - / 2 0 / 2 ). Для ПЗ у виразі (1) під знаком тангенса відповідно до методики роботи [5] з'являється додатковий доданок, обернено пропорційний дальності до ДРВ, і вираз для ПХ набуває вигляду: F1,2 (, d) F(, d) (b2 b2 ) cos2 2 tg (b1 b2 ) sin 1 2d (2) (при d вираз (2) приводиться до (1)). Процедуру перевірки фронту ЕМХ на кривизну зручніше провести, проаналізувавши рівність або відмінність повних різниць фаз між першою і другою ( 21повн ), другою і третьою ( 32повн ), а також, у разі потреби, між третьою і першою ( 31повн ) парами антен з врахуванням різниці довжин неоднозначних баз b b2 b1 21повн 32повн Повні різниці фаз в рівності (3), у свою чергу, можна записати 21повн 21вим 2k 21 (4. а) 32повн 32вим 2k 32 (4. б) Де 21вим і 32вим - різниці фаз між першою і другою, другою і третьою парами антен, виміряні фазометрами 11 і 12 (Фіг.1); k 21 , k 32 - коефіцієнти, що враховують число повних періодів, втрачених при вимірах різниці фаз по відповідних базах ФРП, які будуть рівні k 21 2b1 2b2 U sin sin ; U16 U sin sin ; b1 b 31повн 1 b2 B (3) 25 км 6 k 32 1 b1 42 21вим 2 b3 (5. а) 1 b2 b 52 32вим 2 4 (5. б) де - операція округлення до найближчого цілого, b3 b 4 / 2 - однозначні бази ФРП. Тут і далі різниці фаз 42 і 52 , виміряні за відповідними однозначними шкалами між четвертою і другою, п'ятою і другою антенами, визначаються в мікропроцесорі 22 з напруг U19 і U20 на виходах ФД 19 і 20 із співвідношень U19 U cos( 42 ) (6. а) U20 U cos( 52 ) (6. б) де U - напруги на виходах ідентичних приймачів 9, 10 (а також 6, 7, 8). При виконанні рівності (3) в мікропроцесорі 22 пеленг визначається з ПХ (1), а при невиконанні із співвідношення b ( 21повн 32повн ) arcsin 1 2(b1 b2 )b2 (7) яке отримане завдяки спільному вирішенню нижченаведених рівнянь 2(d d1) 21повн 2 2 2 b1 sin b1 cos 2d (8. а) 2(d3 d) 32повн 2 2 2 b2 sin b2 cos 2d (8. б) де (Фіг.1) дальність від ДРВ до антени А1 7 57200 отримані по методиці роботи [5] для зони Френеля за умови, що B / d 1 і для нерівних баз між парами антен, де d2 - дальність від ДРВ до антени А2. Дальність до ДРВ для ПЗ визначається в мікропроцесорі 22 по співвідношенню 2 d1 d2 2db1 sin b1 2 2 b1 cos2 2d дальність від ДРВ до антени A3 d2 b1 sin (9. a) d3 d2 2db2 sin b2 2 2 d2 b2 sin d b2 cos2 2 2d (9. б) 2 2 b1 42 b1 b2 b2 2b1 32повн 21повн 2 2 2 2 8 2 2 4(b1 b2 )b2 b1 32повн 21повн b1 b2 b1b2 2 також отриманому шляхом спільного вирішення рівнянь (8). Принципові відмінності запропонованого ФРП полягають у удосконалюванні обробки сигналів при більш високих характеристиках щодо точності визначення пеленга при наявності сферичності фронту ЕМХ, а також можливості визначення дальності до ДРВ для ПЗ. Розглянемо варіанти схемної реалізації основних елементів запропонованого ФРП. У якості антен А1 - A3 можливо використовувати гостро направлені антени, наприклад, параболічні антени, розташовані в одній площині по прямій лінії на відстанях, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен і може складати одиниці або десятки довжин хвиль, а антен А4, А5 - не направлені з умов мінімізації взаємного впливу антен, а саме: спотворення їх діаграм направленості і зменшення вхідних опорів. Приймачі 6 - 10 - стандартні підсилювачі високої частоти. У якості ФД 16 - 20 як і в пеленгаторі найближчому аналога [3] можуть бути використані перемножувачі напруги. Фазообертачі на 90 13 і 14 можуть бути виконані на Д/4 відрізках ліній передачі. (10) АЦП 21.1-21.6 та мікропроцесор 22 зі спеціальним програмним забезпеченням є стандартними цифровими пристроями і підбираються окремо під параметри пеленгатора. Проведений аналіз відомих технічних рішень у даній галузі техніки показав, що сукупність ознак, яка відрізняє корисну модель від найближчого аналога, не була виявлена, отже фазовий радіопеленгатор, що заявляється, має істотні відмінності. Джерела інформації: 1. Теоретические основы радиолокации. Под ред. Ширмана Я. Д. Учеб. пособие для вузов.М.:Сов. Радио, 1970.-аналог. 2. Справочник по радиолокации. Под. ред. М. Сколника.- М.: Сов. радио, 1978. -аналог. 3. Патент № 2138061 (Россия) Фазовый радиопеленгатор. М. кл. G 01 S 3/48, //Беспалов Е. С., Кургин В. В.- прототип. 4. Кремер И. Я., Кремер А. И., Петров В. М.; под. ред. : И. Я. Кремер. Пространственно - временная обработка сигналов. - М.: Радио и связь, 1984. - 223 с. 5. Авдеенко Г. Л., Федоров В. И., Якорнов Е. А. Определение местоположения источника радиоизлучения по кривизне фронта электромагнитной волны - Известия ВУЗов. Радиоэлектроника 2008. -Т.51.-№3.-0.3-11. 9 57200 10 11 Комп’ютерна верстка А. Крижанівський 57200 Підписне 12 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPhase radio direction finder
Автори англійськоюAvdeenko Hlib Leonidovych, Ilchenko Mykhailo Yukhymovych, Kolomitsev Maksym Oleksandrovych, Lipchevska Inna Leonidivna, Yakornov Yevhenii Arkadiiovych
Назва патенту російськоюФазовый радиопеленгатор
Автори російськоюАвдеенко Глеб Леонидович, Ильченко Михаил Ефимович, Коломицев Максим Александрович, Липчевская Инна Леонидовна, Якорнов Евгений Аркадиевич
МПК / Мітки
МПК: G01S 3/00
Мітки: фазовий, радіопеленгатор
Код посилання
<a href="https://ua.patents.su/6-57200-fazovijj-radiopelengator.html" target="_blank" rel="follow" title="База патентів України">Фазовий радіопеленгатор</a>
Фазовий радіопеленгатор
Номер патенту: 56430
Опубліковано: 10.01.2011
Автори: Сторубльов Олександр Іванович, Карпенко Борис Олексійович, Авдєєнко Гліб Леонідович, Ліпчевська Ірина Леонідівна, Якорнов Євгеній Аркадійович
Мітки: фазовий, радіопеленгатор
Формула / Реферат:
Фазовий радіопеленгатор, що містить: три антени, розташовані в одній площині по прямій лінії на відстанях (базах), мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, і з різницею довжин баз між ними, рівною , де - середня довжина хвилі робочого діапазону пеленгатора,
Фазовий далекомір для радіолокатора наведення безупинного випромінювання
Номер патенту: 40134
Опубліковано: 16.07.2001
Автори: Бахвалов Валентин Борисович, Порошин Сергій Михайлович
МПК: G01S 11/00
Мітки: далекомір, випромінювання, наведення, фазовий, радіолокатора, безупинного
Формула / Реферат:
Фазовий далекомір для радіолокатора наведення безупинного випромінювання, що містить передавач безупинного сигналу з генератора безупинного сигналу високої частоти f, генератора низької частоти, що модулюс, F і модулятора, антену, що передає, приймальну антену, приймач із фільтром низької частоти F і фазовимірювач зсуву фаз прийнятого сигналу частоти F щодо сигналу низькочастотного генератора передавача, що відрізняється тим, що приймальна...
Радіолокаційний фазовий вимірювач кутових координат із бе3упинним випромінюванням
Номер патенту: 40133
Опубліковано: 16.07.2001
Автори: Порошин Сергій Михайлович, Бахвалов Валентин Борисович
МПК: G01S 3/14
Мітки: кутових, фазовий, координат, бе3упинним, випромінюванням, вимірювач, радіолокаційний
Формула / Реферат:
Радіолокаційний фазовий вимірювач кутових координат із безупинним випромінюванням, що містить передавач безупинного сигналу, пов'язаний прямокутним хвилеводом із рупорною антеною, що передає, приймальну антенну систему, приймачі і два фазовимірювача, що відрізняються тим, що приймальна антенна система виконана з трьох рупорних антен із двох однакових пірамідальних рупори в кожній антені, розташованих на відстані друг від друга по...
Фазовий гідролокатор бокового огляду
Номер патенту: 74686
Опубліковано: 16.01.2006
Автори: Клочан Юрій Анатолійович, Клочан Валентина Іванівна, Гончар Анатолій Іванович
МПК: G01V 1/38, G01S 15/00
Мітки: огляду, бокового, гідролокатор, фазовий
Формула / Реферат:
Фазовий гідролокатор бокового огляду, який містить формувач основного зондуючого імпульсу, передавальний тракт, випромінюючу антену, першу і другу приймальні антени, перший і другий приймальні тракти, перший і другий смугові фільтри, фазовий детектор, фільтр низьких частот, пристрій відображення інформації і пристрій керування, причому вихід передавального тракту з'єднаний з виходом випромінюючої антени, вихід першої приймальної антени...
Фазовий далекомір
Номер патенту: 76699
Опубліковано: 15.09.2006
Автор: Голуб Владислав Сергійович
МПК: G01S 15/00, G01S 13/32, G01S 17/32
Формула / Реферат:
1. Фазовий далекомір, що містить передавач із двома генераторами коливань, що утворюють двочастотний сигнал, приймач із двочастотним сигналом на виході, два перетворювачі різницевої частоти, перший із яких підключений до виходів генераторів, а другий - до виходу приймача, фазовий детектор, входи якого підключені до виходів обох перетворювачів, а вихід - до вимірювального пристрою, який відрізняється тим, що змішувачем у другому перетворювачі...
Попередній патент: Вологомір кормових матеріалів
Наступний патент: Спосіб відкритої розробки горизонтальних і пологих кар’єрів корисних копалин
Випадковий патент: Спосіб отримання противірусних вакцин