Широкосмуговий фазовий радіопеленгатор
Номер патенту: 64705
Опубліковано: 10.11.2011
Автори: Охріменко Ярослав Юрійович, Ліпчевська Інна Леонідівна, Ільченко Михайло Юхимович, Авдєєнко Гліб Леонідович, Якорнов Євгеній Аркадійович
Формула / Реферат
Широкосмуговий фазовий радіопеленгатор, що містить три антени, які розміщені в одній площині по прямій лінії на неоднозначних базах, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен та з різницею довжин баз між ними, рівною ![]() , де
, де ![]() - середня довжина хвилі робочого діапазону пеленгатора,
- середня довжина хвилі робочого діапазону пеленгатора, ![]() - задана межа сектора однозначності визначення пеленга, а також містить три ідентичні приймачі, блок демодуляції сигналів, що має чотири входи та блок логічної обробки, причому виходи антен підключені до входів відповідних приймачів, виходи першого і третього приймачів з'єднані з першим і четвертим входами блока демодуляції, а його другий і третій входи з'єднані з виходом другого приймача, який відрізняється тим, що до нього введені частотомір і вісім аналого-цифрових перетворювачів, при цьому блок демодуляції виконаний на двох широкосмугових фазорозщеплювачах і восьми суматорах з двома входами та восьми амплітудних детекторах, а блок логічної обробки виконаний у вигляді мікропроцесора, причому входи блока демодуляції є входами фазорозщеплювачів, шістнадцять виходів яких з'єднані з відповідними входами суматорів, вісім виходів яких з'єднані з входами амплітудних детекторів, а їхні виходи - з входами аналого-цифрових перетворювачів, виходи яких з'єднані з першими вісьма входами мікропроцесора, вхід частотоміра підключений до виходу другого приймача, а його вихід з'єднаний з дев'ятим входом мікропроцесора, вихід якого є виходом пеленгатора.
- задана межа сектора однозначності визначення пеленга, а також містить три ідентичні приймачі, блок демодуляції сигналів, що має чотири входи та блок логічної обробки, причому виходи антен підключені до входів відповідних приймачів, виходи першого і третього приймачів з'єднані з першим і четвертим входами блока демодуляції, а його другий і третій входи з'єднані з виходом другого приймача, який відрізняється тим, що до нього введені частотомір і вісім аналого-цифрових перетворювачів, при цьому блок демодуляції виконаний на двох широкосмугових фазорозщеплювачах і восьми суматорах з двома входами та восьми амплітудних детекторах, а блок логічної обробки виконаний у вигляді мікропроцесора, причому входи блока демодуляції є входами фазорозщеплювачів, шістнадцять виходів яких з'єднані з відповідними входами суматорів, вісім виходів яких з'єднані з входами амплітудних детекторів, а їхні виходи - з входами аналого-цифрових перетворювачів, виходи яких з'єднані з першими вісьма входами мікропроцесора, вхід частотоміра підключений до виходу другого приймача, а його вихід з'єднаний з дев'ятим входом мікропроцесора, вихід якого є виходом пеленгатора.
Текст
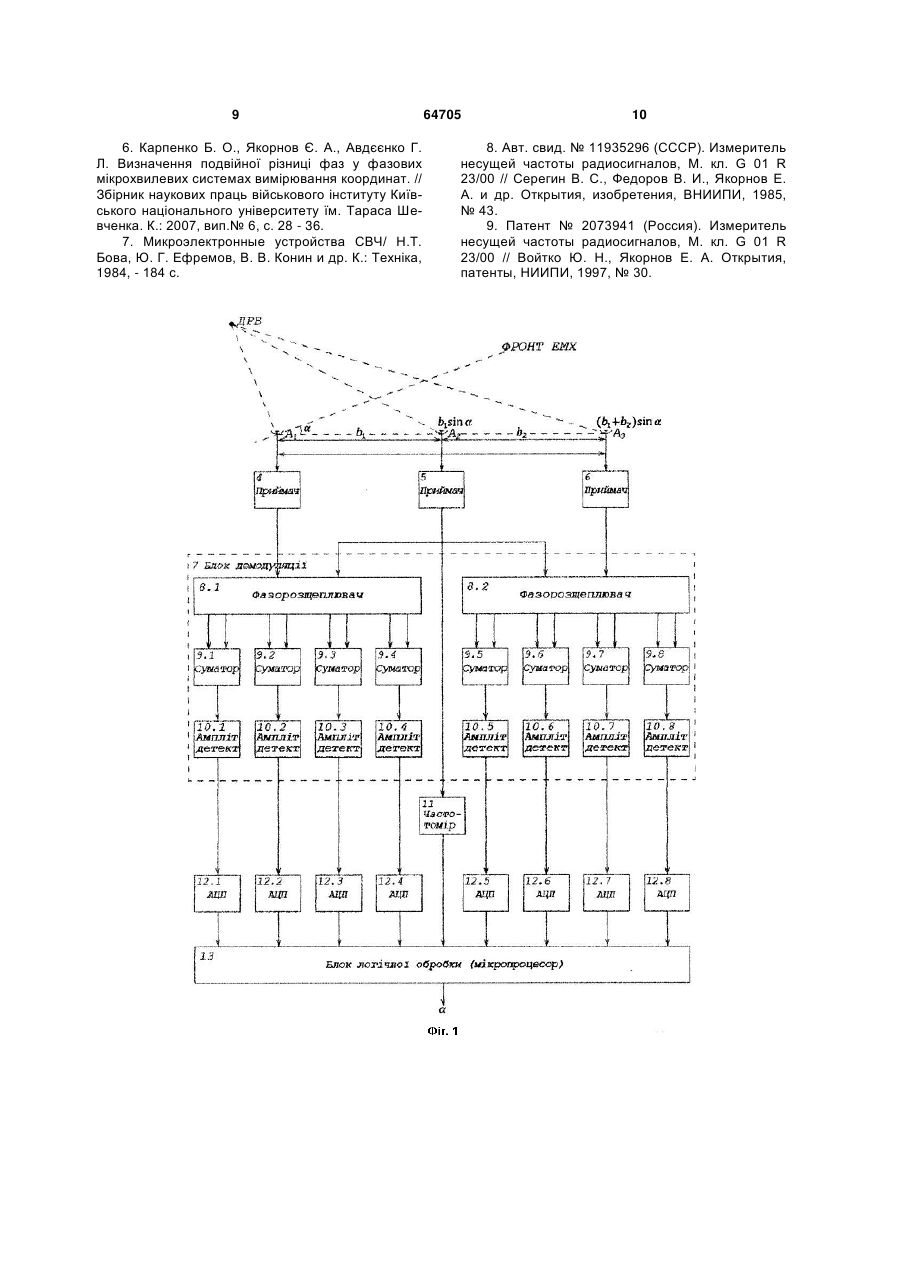
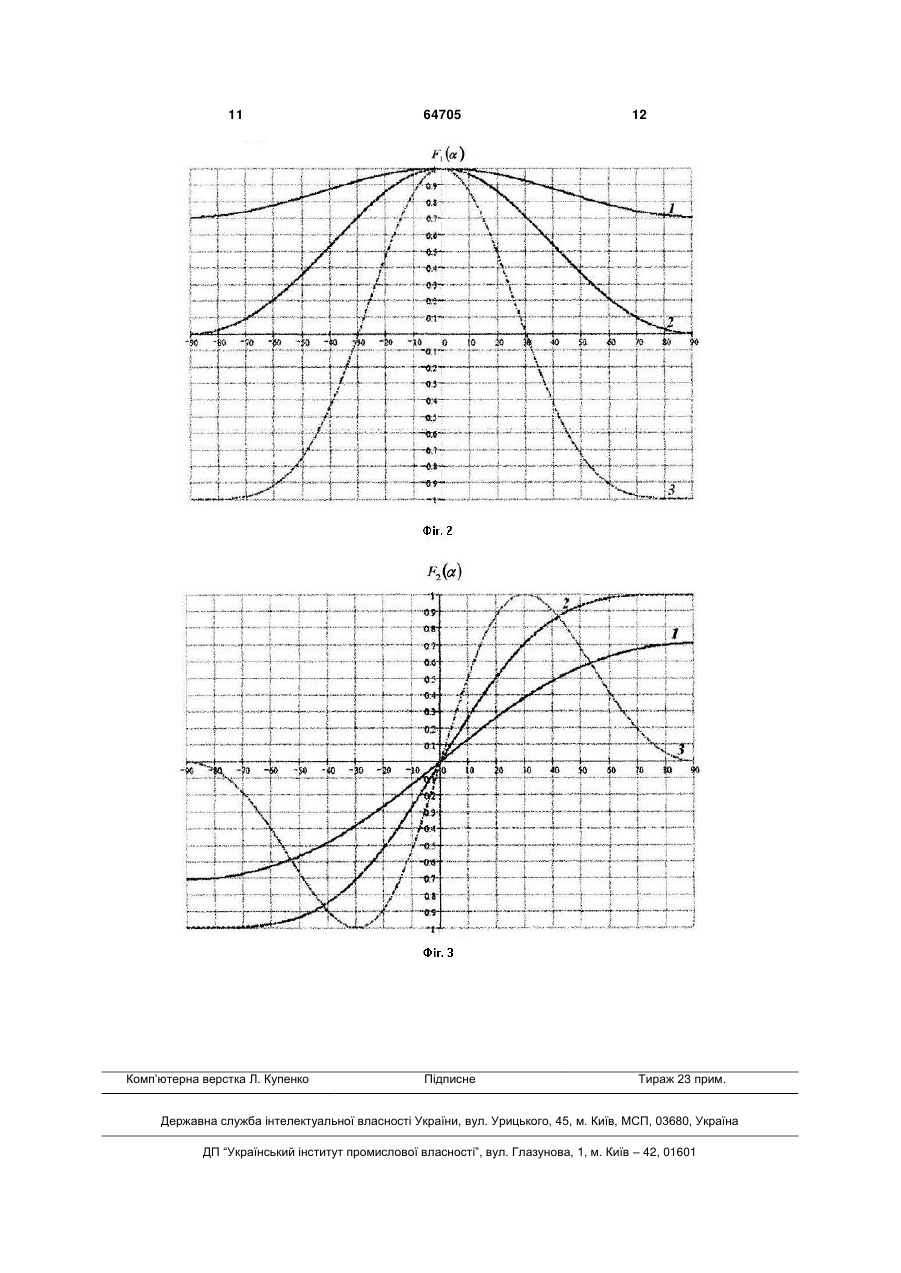
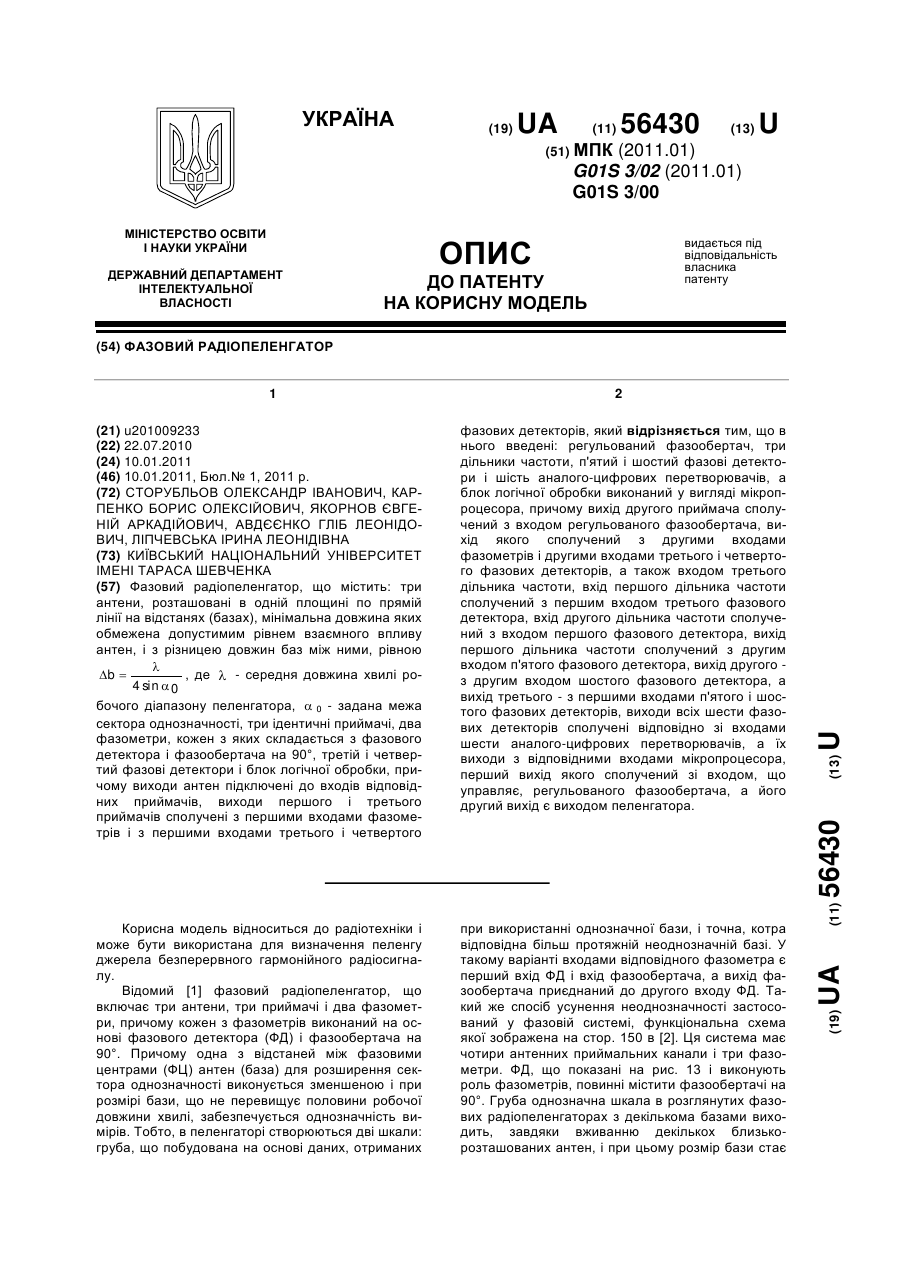
Широкосмуговий фазовий радіопеленгатор, що містить три антени, які розміщені в одній площині по прямій лінії на неоднозначних базах, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен та з різницею довжин баз між ними, рівною b , де - серед4 sin 0 2 (19) 1 3 та чотирьох ФД, і блок логічної обробки сигналів. Проте такий ФРП є вузькосмуговим і має помилки вимірювання пеленгу, обумовлені дрейфом характеристик фазообертачів і пеленгаційною характеристикою (ПХ) у вигляді тангенсоїди. Найближчим аналогом до запропонованого ФРП є патент [3]. Відомий ФРП, обраний в якості найближчого аналога, містить три антени, розташовані в одній площині на прямій лінії на відстанях (базах), мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, і з різницею довжин неоднозначних баз між ними рівною b , де - середня довжина хвилі ро4 sin 0 бочого діапазону пеленгатора, 0 - задана границя сектора однозначності виміру пеленга, три ідентичні приймачі, блок демодуляції сигналів, що має чотири входи та складається з двох фазообертачів на 90° та чотирьох ФД, і блок логічної обробки, причому виходи антен підключені до входів відповідних приймачів, виходи першого і третього приймачів сполучені з першими входами фазометрів і першими входами третього і четвертого ФД, а виходи другого приймача з'єднані з другими входами фазометрів і другими входами третього і четвертого ФД. Основним недоліком найближчого аналога є помилки виміру пеленга, зв'язані з відхиленням частоти джерела радіовипромінювання (ДРВ) від середньої, дрейфом характеристик фазообертачів і ПХ у вигляді тангенсоїди. Останній недолік полягає в наступному: 1) через непарність функції тангенса при знаходженні ДРВ на нульовому пеленгу рівень ПХ на виході ФРП дорівнює нулю, що призводить до невизначеності при виявленні ДРВ; 2) в пограничній області чисельне значення знаменника ПХ наближується до нуля, що призводить до виникнення значних помилок вимірювання пеленга при додаванні до знаменника навіть шумів малого рівня. В основу корисної моделі поставлено завдання визначити пеленг в широкому діапазоні радіочастот при відсутності невизначеності в випадку знаходження ДРВ на нульовому пеленгу, виключення помилок при вимірюваннях в пограничній області ПХ та виключення систематичної помилки вимірювань, що обумовлена з дрейфом характеристик фазообертачів. Поставлена задача вирішується наступним чином: в ФРП, що містить три антени, які розташовані в одній площині по прямій лінії на відстанях (базах), мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен і з різницею довжин неоднозначних баз між ними рівною b , три ідентичні приймачі, блок демодуляції сигналів, що має чотири входи та блок логічної обробки, причому виходи антен підключені до входів відповідних приймачів, виходи першого і третього приймачів з'єднані з першим та четвертим входами блока демодуляції, а його другий та третій входи з'єднані з виходом другого приймача, новим є те, що до нього введені частотомір та вісім аналого-цифрових перетворювачів (АЦП), блок демодуляції виконаний на двох широкосмугових фазоро 64705 4 зщеплювачах, восьми суматорах з двома входами та восьми амплітудних детекторах (АД), а блок логічної обробки виконаний у вигляді мікропроцесора; причому входи блока демодуляції є входами фазорозщеплювачів, шістнадцять виходів яких з'єднані з відповідними входами суматорів, вісім виходів яких з'єднані з входами АД, а їхні виходи з входами АЦП, виходи яких з'єднані з першими вісьма входами мікропроцесора; вхід частотоміра підключений до виходу другого приймача, його вихід з'єднано з дев'ятим входом мікропроцесора, вихід якого є виходом пеленгатора. На фіг. 1 наведена структурна схема широкосмугового ФРП, а на фіг. 2, 3 - вигляд його ПХ в залежності від різниці довжин неоднозначних баз b . Широкосмуговий фазовий радіопеленгатор (фіг. 1) містить: три антени A1, A2, A3, встановлені на одній лінії, перпендикулярній осям симетрії їх характеристик направленості, і на неоднозначних базах b1 , та b 2 , що відрізняються на величину b , з мінімальними довжинами баз, обмеженими допустимим рівнем взаємного впливу антен; три ідентичні приймачі 4 - 6; блок демодуляції сигналів 7, що має чотири входи, в складі: двох широкосмугових фазорозщеплювачів 8.1, 8.2, восьми широкосмугових суматорів 9.1 - 9.8 з двома входами та восьми АД 10.1 - 10.2; частотомір 11; вісім АЦП 12.1 - 12.2 і блок логічної обробки (мікропроцесор) 13. Причому виходи антен A1, A2, A3 підключені до входів відповідних приймачів 4 - 6, виходи першого 4 і третього приймачів 6 з'єднані з першим і четвертими входами блока демодуляції 7, а його другий та третій входи з'єднані з виходом другого приймача 5, входи блока демодуляції 7 є входами фазорозщеплювачів 8.1, 8.2, шістнадцять виходів яких з'єднані з відповідними входами суматорів 9.1 - 9.8, вісім виходів яких з'єднані з входами АД 10.1 - 10.8, а їх виходи - з входами АЦП 12.1 - 12.8, виходи яких з'єднані з першими вісьма входами мікропроцесора 13; вхід частотоміра 11 підключено до виходу другого приймача 5, його вихід з'єднаний з дев’ятим входом мікропроцесора 13, вихід якого є виходом пеленгатора. Широкосмуговий фазовий радіопеленгатор працює наступним чином. При дії фронту ЕМХ на виходах антен А1 - А3 утворюються сигнали, які підсилюються приймачами 4 - 6, перетворюються за допомогою блока демодуляції 7 в напругу, що несе інформацію про пеленг ( ) на ДРВ і надходять після АЦП 12.1 - 12.8 в цифровому вигляді в мікропроцесор 13. У мікропроцесорі 13 на першому етапі на відміну від найближчого аналога введена обов'язкова процедура перевірки частоти сигналів, що приймаються, за допомогою частотоміра 11, яка враховується як вим при визначенні пеленгу. Далі для усунення вказаних в аналогу недоліків в мікропроцесорі 13 на основі напруг на виходах демодулятора 7 реалізується алгоритм визначення пеленга за косинусною та синусною ПХ 5 64705 b F1 cos b sin cos sin , 4 2вим (1) b F2 sin b sin sin sin , (2) 4 2вим де - коефіцієнт фази, b b1 b2 - різниця довжин баз (фіг. 1). Наприклад, при b / 2 ПХ (1) - (2) можна записати у вигляді b b 12 23 , F1 cos 1 2 sin cos (1. a) 2вим 4 b b 12 23 F2 sin 1 2 sin sin , (2. а) 2вим 4 6 де 12 b1 sin - фазовий зсув між першою (А1) та другою (А2) антенами ФРП, а 23 b2 sin - фазовий зсув між другою (А2) та третьою (А3) антенами ФРП. Вигляд ПХ F1 та F2 згідно виразів (1) і (2) в залежності від для середньої частоти робочого діапазону ФРП приведений на фіг. 2, 3, де крива 1 - при b / 2 , крива 2 – при b , крива 3 при b 2 , які дозволяють обрати різницю довжин баз при заданому однозначному значенні 0 . Розрахункові співвідношення для ПХ при найбільш вживаних на практиці різницях довжин баз для середньої частоти робочого діапазону ФРП мають наступний вигляд: b / 8 : 2 F cos b sin cos12 23 cos 12 cos 23 sin 12 sin 23 S12S12 S S , 1 34 34 (3) 2 34 F2 sin b sin sin12 23 sin 12 cos 23 cos 12 sin 23 S S12 S12S , 34 (4) b / 4 : 1 S 23 ,(5) F1 cos b sin 12 2 2 де S cos12 23 cos sin S12S12 S S ; 34 34 2 2 sin b sin F2 sin b sin 2 cos b sin 2 sin b sin 2 1 cos b sin 2 2 ˆ S 1 S 2 , (6) 2 ˆ де S sin12 23 sin b sin sin sin S S12 S12S34 ; 34 2 b / 2 : 23 F1 cos b sin cos 12 4 2 23 1 S 1 cos 12 1 2 2 , 2 2 (7) 7 64705 8 sin b sin F2 sin b sin 2 2 cos b sin 2 sin b sin 1 cos b sin 4 cos b sin 2 2 sin b sin ˆ S 2 2 1 S 1 1 S 1 cos b sin 2 2 2 1 cos b sin 1 2 1 cos b sin 2 2 2 sin b sin В виразах (3) - (8) S12 U1 U / U1 U cos12 , 2 2 (9) S U U / U1 U sin12 , 34 3 4 2 (10) S12 U1 U / U1 U cos23 , 2 2 (11) S U U / U1 U sin23 , 34 3 4 2 (12) U1 kU 0 1 cos12 kU 0 1 cosb1 sin , (13) U kU 0 1 cos12 kU 0 1 cosb1 sin , 2 (14) U kU 0 1 sin12 kU 0 1 sinb1 sin , 3 (15) U kU 0 1 sin12 kU 0 1 sinb1 sin , 4 (16) U1 kU 0 1 cos23 kU 0 1 cosb2 sin , (17) U kU 0 1 cos23 kU 0 1 cosb2 sin , (18) 2 U kU 0 1 sin23 kU 0 1 sinb2 sin , 3 U kU 0 1 sin23 kU 0 1 sinb2 sin , 4 (19) (20) де k - коефіцієнт передачі фазорозщеплювача, суматора і амплітудного детектора, U0 - напруга сигнала на виході приймача. Напруги на виходах АД 10.1, 10.8, що описуються співвідношеннями (13) - (20), отримані за результатами робіт [4 - 6] при виконанні фазорозщеплювачів 8.1, 8.2 і суматорів 9.1 - 9.8 з двома входами на основі широкосмугових квадратурних мостів. Принципові відмінності запропонованого широкосмугового ФРП полягають у удосконалюванні обробки сигналів при більш високих характеристиках щодо точності визначення пеленга в діапазоні радіочастот. (8) Розглянемо варіанти схемної реалізації основних елементів запропонованого ФРП. У якості антен А1 - A3 можна використовувати ненаправлені антени, розташовані в одній площині по прямій лінії на відстанях, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен і може складати одиниці або десятки довжин хвиль. Приймачі 4 - 6 – стандартні підсилювачі високої частоти. У якості широкосмугових квадратурних мостів можуть бути використані мости Ланге [7]. У якості частотоміра 11 може бути застосований будь-який частотомір діапазону хвиль, що використовується, у тому числі й частотоміри авторів [8, 9]. АЦП 12.1 - 12.8 та мікропроцесор 13 зі спеціальним програмним забезпеченням є стандартними цифровими пристроями і підбираються окремо під параметри пеленгатора. Проведений аналіз відомих технічних рішень у даній галузі техніки показав, що сукупність ознак, яка відрізняє корисну модель від найближчого аналога, не була виявлена, отже широкосмуговий фазовий радіопеленгатор, що заявляється, має істотні відмінності. Джерела інформації: 1. Теоретические основы радиолокации. Под ред. Ширмана Я. Д. Учеб. пособие для вузов. М.:Сов. Радио, 1970. - аналог. 2. Справочник по радиолокации. Под. ред. М. Сколника. - М.; Сов. радио, 1978. - аналог. 3. Патент № 2138061 (Россия) Фазовый радиопеленгатор. М. кл. G 01 S 3/48, //Беспалов Е. С., Кургин В. В. Открытия, патенты, НИИПИ, 1999, № 26. - прототип. 4. Гранкин И. М., Ищенко В. А., Ясинский В. Л. К анализу широкополосных четырехдетекторных фазоизмерительных систем. // «Известия ВУЗов, Радиоэлектроника» К.: 1968, № 4 с. 332. 5. Войтко Ю. Н., Якорнов Е. А. Определение фазовых сдвигов в широкополосных четырехдетекторных фазоизмерительных схемах. // «Известия ВУЗов, - Радиоэлектроника» К.: 1995, № 5, с. 57 61. 9 6. Карпенко Б. О., Якорнов Є. А., Авдєєнко Г. Л. Визначення подвійної різниці фаз у фазових мікрохвилевих системах вимірювання координат. // Збірник наукових праць військового інституту Київського національного університету їм. Тараса Шевченка. К.: 2007, вип.№ 6, с. 28 - 36. 7. Микроэлектронные устройства СВЧ/ Н.Т. Бова, Ю. Г. Ефремов, В. В. Конин и др. К.: Техніка, 1984, - 184 с. 64705 10 8. Авт. свид. № 11935296 (СССР). Измеритель несущей частоты радиосигналов, М. кл. G 01 R 23/00 // Серегин B. C., Федоров В. И., Якорнов Е. А. и др. Открытия, изобретения, ВНИИПИ, 1985, № 43. 9. Патент № 2073941 (Россия). Измеритель несущей частоты радиосигналов, М. кл. G 01 R 23/00 // Войтко Ю. Н., Якорнов Е. А. Открытия, патенты, НИИПИ, 1997, № 30. 11 Комп’ютерна верстка Л. Купенко 64705 Підписне 12 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюBroadband phase radio direction finder
Автори англійськоюAvdeenko Hlib Leonidovych, Ilchenko Mykhailo Yukhymovych, Lipchevska Inna Leonidivna, Okhrimenko Yaroslav Yuriiovych, Yakornov Yevhenii Arkadiiovych
Назва патенту російськоюШирокополосный фазовый радиопеленгатор
Автори російськоюАвдеенко Глеб Леонидович, Ильченко Михаил Ефимович, Липчевская Инна Леонидовна, Охрименко Ярослав Юрьевич, Якорнов Евгений Аркадиевич
МПК / Мітки
МПК: G01S 3/00
Мітки: радіопеленгатор, фазовий, широкосмуговий
Код посилання
<a href="https://ua.patents.su/6-64705-shirokosmugovijj-fazovijj-radiopelengator.html" target="_blank" rel="follow" title="База патентів України">Широкосмуговий фазовий радіопеленгатор</a>
Фазовий радіопеленгатор
Номер патенту: 56430
Опубліковано: 10.01.2011
Автори: Карпенко Борис Олексійович, Сторубльов Олександр Іванович, Авдєєнко Гліб Леонідович, Ліпчевська Ірина Леонідівна, Якорнов Євгеній Аркадійович
Мітки: радіопеленгатор, фазовий
Формула / Реферат:
Фазовий радіопеленгатор, що містить: три антени, розташовані в одній площині по прямій лінії на відстанях (базах), мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, і з різницею довжин баз між ними, рівною , де - середня довжина хвилі робочого діапазону пеленгатора,
Фазовий радіопеленгатор
Номер патенту: 57200
Опубліковано: 10.02.2011
Автори: Ліпчевська Інна Леонідівна, Коломицев Максим Олександрович, Якорнов Євгеній Аркадійович, Ільченко Михайло Юхимович, Авдєєнко Гліб Леонідович
МПК: G01S 3/00
Мітки: радіопеленгатор, фазовий
Формула / Реферат:
Фазовий радіопеленгатор що містить: три антени, розміщені в одній площині по прямій лінії на неоднозначних базах, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, та з різницею довжин баз між ними, рівною , де λ середня довжина хвилі робочого діапазону пеленгатора, α0 - задана границя сектора однозначності визначення пеленга; три...
Широкосмуговий спектрометр підвищеної точності
Номер патенту: 93096
Опубліковано: 10.01.2011
Автори: Моісєєв Дмитро Володимирович, Сапожніков Микола Євгенович
МПК: G01T 1/00
Мітки: широкосмуговий, підвищеної, спектрометр, точності
Формула / Реферат:
Широкосмуговий гамма-спектрометр, що містить сцинтилятор, фотоелектронний помножувач в імпульсному режимі роботи, підключений до багатоканального амплітудного аналізатора, який включає блок логічних елементів підсумовування по модулю 2 та блок регістрів пам'яті, а його вихід є виходом всієї схеми, який відрізняється тим, що багатоканальний амплітудний аналізатор додатково містить блок віднімальних лічильників, генератор тактових імпульсів та...
Перетворювач змін частоти сигналу у фазовий зсув
Номер патенту: 36610
Опубліковано: 16.04.2001
Автор: Рапін Володимир Васильович
МПК: H03L 7/00
Мітки: зсув, фазовий, змін, частоти, сигналу, перетворювач
Текст:
...до входу др угого підсилювача з автоматичним регулюванням підсилення 7, вихід цього підсилювача з'єднаний з другими входами блоків формування сигналу синхронізації 2, 3, 4 (n+1 блок). Структурна схема блоку формування сигналу синхронізації містить послідовно з'єднані суматор 8 і підсилювач з автоматичним регулюванням підсилення 9, причому перший та другий входи суматора 8 є також першим та другим входами блоку формування сигналу...
Фазовий модулятор
Номер патенту: 83668
Опубліковано: 11.08.2008
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: H04L 27/20, H04L 27/18
Формула / Реферат:
Фазовий модулятор, що містить послідовно з'єднані вхідний суматор (1), перемножувач (2), проміжний суматор (3), елемент затримки (4) та компаратор (5), який відрізняється тим, що два входи вхідного суматора (1) є входами сигналу несучої частоти, а третій його вхід є входом інверсного сигналу і з'єднаний з виходом елемента затримки (4), при цьому другий вхід перемножувача (2) є входом вхідного сигналу X, другий вхід проміжного суматора...
Попередній патент: Спосіб корекції токсичних уражень печінки
Наступний патент: Спосіб енергетичного виявлення радіосигналів при впливі активних маскуючих перешкод
Випадковий патент: Кулемет