Спосіб перетворення сил інерції в сили тяги

Формула / Реферат
Спосіб перетворення сил інерції в сили тяги, в якому два тягарці встановлені кожний на своїй індивідуальній кулісі, кожна куліса з'єднана із своїм індивідуальним валом, два вали паралельні між собою, на носку кожного вала встановлена індивідуальна циліндрична зубчата шестірня, зуби двох шестірень зачеплені між собою, в якому обертають один з індивідуальних валів, через зубчаті шестерні обертання передають другому валу, у результаті цього два вали обертають разом з кулісами та тягарцями з однаковою кутовою швидкістю в протилежних напрямках у протифазі щодо площини симетрії двох валів, і в результаті обертання тягарців на тягарці діють нормальні радіально направлені сили інерції, векторну суму яких одержують у вигляді направленого вектора сил інерції, лінія дії якого проведена через лінію симетрії двох тягарців, а величину вектора сумарних сил інерції гармонічно змінюють, який відрізняється тим, що підшипникові опори валів установлені на рамі, пов'язаній з ексцентриковою шийкою ексцентрикового вала, зуби одної із шестерень зачеплені із зубами колеса, встановленого на ділянці ексцентрикової шийки, розташованої поза ділянкою між двома щоками ексцентрикового вала, і для перетворення в обертаючі сили (тяги) рама шарнірно встановлена на ексцентриковій шийці ексцентрикового вала та шарнірно встановлена на ексцентриковій шийці другого ексцентрикового вала, а колесо закріплене на ексцентриковій шийці ексцентрикового вала, а для перетворення в переміщаючі сили (тяги) рама закріплена на ексцентриковій шийці ексцентрикового вала, а колесо посаджене з можливістю обертання на ексцентрикову шийку ексцентрикового вала та маточина колеса з'єднана з маточиною другого колеса, посадженого на цю ексцентрикову шийку ексцентрикового вала, та зуби другого колеса зачеплені із зубами третього колеса, посадженого з можливістю обертання на корінну шийку цього ексцентрикового вала, але третє колесо загальмоване, в якому обертають ексцентриковий вал навколо осі його корінних шийок і через зубчате колесо та шестерні обертання ексцентрикового вала передають валам і кулісам з тягарцями на рамі, і від руху тягарців одержують направлені сили інерції, і при перетворенні в обертаючі сили (тяги) при обертанні ексцентрикового вала лінію дії сумарних сил інерції плоско-паралельно переміщають по окружності щодо осі обертання ексцентрикового вала, з рухом лінії дії сил інерції, кінематично пов'язаної з обертанням ексцентрикового вала та передачею на ексцентрикову шийку ексцентрикового вала сумарних сил інерції, причому при зміні напрямку вектора сумарних сил інерції на протилежне в системі відліку рами раму переміщають у системі відліку опор ексцентрикового вала так, що напрямок проекції вектора швидкості руху ексцентрикової шийки ексцентрикового вала на лінію дії вектора сумарних сил інерції постійно збігається з напрямком вектора сумарних сил інерції, а при перетворенні в переміщаючі сили (тяги) при обертанні ексцентрикового вала лінію дії сумарних сил інерції обертають щодо осі обертання ексцентрикового вала, з обертанням лінії дії сил інерції кінематично пов'язаної з обертанням ексцентрикового вала та передачею на корінні опори ексцентрикового вала сумарних сил інерції, причому при зміні напрямку вектора сумарних сил інерції на протилежний в системі відліку рами, раму з її системою відліку також повертають у системі відліку опор корінних шийок ексцентрикового вала зі зміною напрямку проекції на вісь симетрії годографа вектора сумарних сил інерції, пов'язаного із системою відліку рами так, що напрямок проекції вектора сумарних сил інерції на лінію симетрії годографа завжди направлено в одну сторону.
Текст
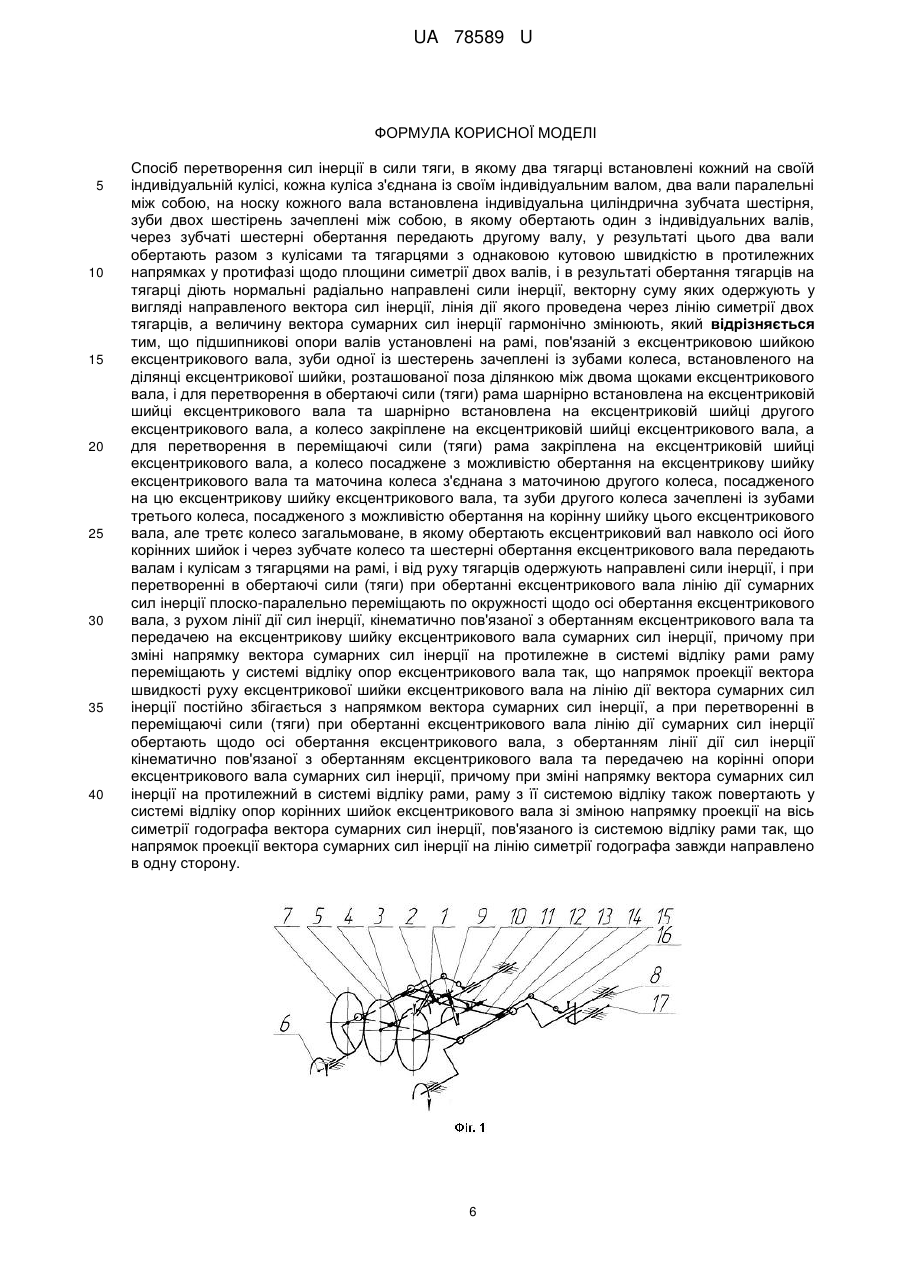
Реферат: UA 78589 U сумарних сил інерції, причому при зміні напрямку вектора сумарних сил інерції на протилежний в системі відліку рами, раму з її системою відліку також повертають у системі відліку опор корінних шийок ексцентрикового вала зі зміною напрямку проекції на вісь симетрії годографа вектора сумарних сил інерції, пов'язаного із системою відліку рами так, що напрямок проекції вектора сумарних сил інерції на лінію симетрії годографа завжди направлено в одну сторону. UA 78589 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до інерційних двигунів, які перетворюють виникаючі при рухові її елементів сили інерції в механічні сили тяги. Загальновідомий спосіб одержання направлених сил інерції Лончестера, застосовуваний для взаємного знищення одержуваних направлених сил інерції з неврівноваженими силами інерції, що виникають при рухові елементів кривошипно-шатунного механізму в поршневих двигунах, у якому два тягарці встановлених кожний на своєму важелі (кулісі), кожна куліса з'єднана з індивідуальним валом, два вали паралельні між собою, на носку кожного вала встановлена циліндрична зубчата шестерня, зуби шестерень двох валів зачеплені між собою, у якому обертають один з валів, через зубчаті шестерні обертання передають другому валу, у результаті цього два вали обертають разом з кулісами та тягарцями з однаковою кутовою швидкістю в протилежних напрямках у протифазі, і в результаті обертання тягарців на тягарці діють нормальні радіально направлені сили інерції, а векторну суму двох сил інерції від двох тягарців одержують у вигляді направленого вектора сил інерції, лінія дії якого проведена через лінію симетрії двох тягарців, а величину вектора сумарних сил інерції гармонічно змінюють. Докладніше див. книгу за редакцією Орліна А.С. Двигуни внутрішнього згоряння. Конструювання та розрахунки поршневих і комбінованих двигунів. - М. Машинобудування. 1985. див. текст Розділ 1 Сили та моменти, діючі в поршневих і комбінованих двигунах. Сили та моменти в однорядному двигуні. - С. 70 і Рис. 38 на С. 70 Недоліком загальновідомого способу одержання направлених сил інерції Лончестера є нерухомість лінії дії гармонічно змінюваних сил інерції щодо осей обертання рухомих елементів. Наслідком зазначеного недоліку є відсутність можливості впливу виникаючих при рухові тягарців гармонійно змінюваних сил інерції на можливість руху, тому що середня за період руху тягарців скалярна величина сил інерції відмінна від нуля при середній векторній величині сил інерції рівній нулю. В основу корисної моделі поставлена задача одержання способу перетворення сил інерції в сили тяги, в якому два тягарці встановлені кожний на своїй індивідуальній кулісі, кожна куліса з'єднана із своїм індивідуальним валом, два вали паралельні між собою, на носку кожного вала встановлена індивідуальна циліндрична зубчата шестерня, зуби двох шестерень зачеплені між собою, в якому обертають один з індивідуальних валів, через зубчаті шестерні обертання передають другому валу, у результаті цього два вали обертають разом з кулісами та тягарцями з однаковою кутовою швидкістю в протилежних напрямках у протифазі щодо площини симетрії двох валів, і в результаті обертання тягарців на грузи діють нормальні радіально направлені сили інерції, векторну суму яких одержують у вигляді направленого вектора сил інерції, лінія дії якого проведена через лінію симетрії двох тягарців, а величину вектора сумарних сил інерції гармонічно змінюють, в якому завдяки тому, що підшипникові опори валів установлені на рамі пов'язаній з ексцентриковою шийкою ексцентрикового пала, зуби одної із шестерень зачеплені із зубами колеса встановленого на ділянці ексцентрикової шийки розташованої поза ділянкою між двома щоками ексцентрикового вала, і для перетворення в обертаючі сили (тяги) рама шарнірно встановлена на ексцентриковій шийці ексцентрикового вала та шарнірно встановлена на ексцентриковій шийці другого ексцентрикового вала, а колесо закріплене на ексцентриковій шийці ексцентрикового вала, а для перетворення в переміщаючі сили (тяги) рама закріплена на ексцентриковій шийці ексцентрикового вала а колесо посаджене з можливістю обертання на ексцентрикову шийку ексцентрикового вала та маточина колеса з'єднана з маточиною другого колеса посадженого на цю ексцентрикову шийку ексцентрикового вала та зуби другого колеса зачеплені із зубами третього колеса посадженого з можливістю обертання на корінну шийку цього ексцентрикового вала, але третє колесо загальмоване, в якому обертають ексцентриковий вал навколо осі його корінних шийок і через зубчате колесо та шестерні обертання ексцентрикового вала передають валам і кулісам з тягарцями на рамі, і від руху тягарців одержують направлені сили інерції, і при перетворенні в обертаючі сили (тяги) при обертанні ексцентрикового вала лінію дії сумарних сил інерції плоско-паралельно переміщають по окружності щодо осі обертання ексцентрикового вала, з рухом лінії дії сил інерції кінематично пов'язаної з обертанням ексцентрикового вала та передачею на ексцентрикову шийку ексцентрикового вала сумарних сил інерції, причому при зміні напрямку вектора сумарних сил інерції на протилежне в системі відліку рами раму переміщають у системі відліку опор ексцентрикового вала так, що напрямок проекції вектора швидкості руху ексцентрикової шийки ексцентрикового вала на лінію дії вектора сумарних сил інерції постійно збігається з напрямком вектора сумарних сил інерції, а при перетворенні в переміщаючі сили (тяги) при обертанні ексцентрикового вала лінію дії сумарних сил інерції обертають щодо осі обертання ексцентрикового вала, з обертанням лінії дії сил інерції кінематично пов'язаної з обертанням ексцентрикового вала та передачею на корінні опори ексцентрикового вала сумарних сил 1 UA 78589 U 5 10 15 20 25 30 35 40 45 50 55 60 інерції, причому при зміні напрямку вектора сумарних сил інерції на протилежний в системі відліку рами, раму з її системою відліку також повертають у системі відліку опор корінних шийок ексцентрикового вала зі зміною напрямку проекції на вісь симетрії годографа вектора сумарних сил інерції, пов'язаного із системою відліку рами так, що напрямок проекції вектора сумарних сил інерції на лінію симетрії годографа завжди направлено в одну сторону, забезпечується збільшення швидкості обертання або підтримка швидкості обертання на заданому рівні силами інерції та левітація руху машин, і за рахунок цього отримане джерело обертання, що не робить вплив на навколишнє середовище, отримана левітація силами інерції для руху машин. Поставлена задача вирішується способом перетворення сил інерції в сили тяги, у якому два тягарці встановлених кожний на своїй індивідуальній кулісі, кожна куліса з'єднана із своїм індивідуальним валом, два вали паралельні між собою, на носку кожного вала встановлена індивідуальна циліндрична зубчата шестерня, зуби двох шестерень зачеплені між собою, в якому обертають один з індивідуальних валів, через зубчаті шестерні обертання передають другому валу, у результаті цього два вали обертають разом з кулісами та тягарцями з однаковою кутовою швидкістю в протилежних напрямках у протифазі щодо площини симетрії двох валів, і в результаті обертання тягарців на грузи діють нормальні радіально направлені сили інерції, векторну суму яких одержують у вигляді направленого вектора сил інерції, лінія дії якого проведена через лінію симетрії двох тягарців, а величину вектора сумарних сил інерції гармонічно змінюють, в якому відповідно до корисної моделі, підшипникові опори валів установлені на рамі пов'язаній з ексцентриковою шийкою ексцентрикового вала, зуби одної із шестерень зачеплені із зубами колеса встановленого на ділянці ексцентрикової шийки розташованої поза ділянкою між двома щоками ексцентрикового вала, і для перетворення в обертаючі сили (тяги) рама шарнірно встановлена на ексцентриковій шийці ексцентрикового вала та шарнірно встановлена на ексцентриковій шийці другого ексцентрикового вала, а колесо закріплене на ексцентриковій шийці ексцентрикового вала, а для перетворення в переміщаючі сили (тяги) рама закріплена на ексцентриковій шийці ексцентрикового вала а колесо посаджене з можливістю обертання на ексцентрикову шийку ексцентрикового вала та маточина колеса з'єднана з маточиною другого колеса посадженого на цю ексцентрикову шийку ексцентрикового вала та зуби другого колеса зачеплені із зубами третього колеса посадженого з можливістю обертання на корінну шийку цього ексцентрикового вала, але третє колесо загальмоване, в якому обертають ексцентриковий вал навколо осі його корінних шинок і через зубчате колесо та шестерні обертання ексцентрикового вала передають валам і кулісам з тягарцями на рамі, і від руху тягарців одержують направлені сили інерції, і при перетворенні в обертаючі сили (тяги) при обертанні ексцентрикового вала лінію дії сумарних сил інерції плоско-паралельно переміщають по окружності щодо осі обертання ексцентрикового вала, з рухом лінії дії сил інерції кінематично-пов'язаної з обертанням ексцентрикового вала та передачею на ексцентрикову шийку ексцентрикового вала сумарних сил інерції, причому при зміні напрямку вектора сумарних сил інерції на протилежне в системі відліку рами раму перемішають у системі відліку опор ексцентрикового вала так, що напрямок проекції вектора швидкості руху ексцентрикової шийки ексцентрикового вала на лінію дії вектора сумарних сил інерції постійно збігається з напрямком вектора сумарних сил інерції, а при перетворенні в переміщаючі сили (тяги) при обертанні ексцентрикового вала лінію дії сумарних сил інерції обертають щодо осі обертання ексцентрикового вала, з обертанням лінії дії сил інерції кінематично пов'язаної з обертанням ексцентрикового вала та передачею на корінні опори ексцентрикового вала сумарних сил інерції, причому при зміні напрямку вектора сумарних сил інерції на протилежний в системі відліку рами, раму з її системою відліку також повертають у системі відліку опор корінних шийок ексцентрикового вала зі зміною напрямку проекції на вісь симетрії годографа вектора сумарних сил інерції, пов'язаного із системою відліку рами так, що напрямок проекції вектора сумарних сил інерції на лінію симетрії годографа завжди направлено в одну сторону. Спосіб перетворення сил інерції в сили тяги реалізується в інерційній машині обертання та Інерційній машині переміщення. Корисна модель пояснюється графічними матеріалами, у яких показано на Фіг. 1 Інерційна машина обертання, на Фіг. 2 і Фіг. 3 схема дії сил інерції на механізм Інерційної машини обертання, на Фіг. 4 інерційна машина переміщення, на Фіг. 5 і Фіг. 6 схема дії сил інерції на механізм інерційної машини переміщення, на Фіг. 7 годограф вектора сил інерції діючих в інерційній машині переміщення, на Фіг. 8 схема дії сил інерції у левітуючій платформі. В інерційну машину обертання включені: (див. Фіг. 1) два тягарці - 1, кожний з тягарців - 1 посаджений на індивідуальну кулісу - 2, куліса - 2 виконана разом з індивідуальним валом - 3, опори кожного вала - 3 розташовані в рамі - 4, на носок кожного вала - 3 посаджена індивідуальна циліндрична зубчата шестерня - 5, зуби двох шестерень - 5 зачеплені між собою, 2 UA 78589 U 5 10 15 20 25 30 35 40 45 50 55 60 рама - 4 шарнірно встановлена на ексцентрикову шийку ексцентрикового вала - 6, опори корінних шийок якого нерухомі, крім того, на ексцентрикову шийку ексцентрикового вала - 6 ділянка якої розташований поза простором між щоками ексцентрикового вала - 6 посаджене зубчате циліндричне колесо - 7, яке закріплено на ексцентриковій шийці ексцентрикового вала 6, крім цього рама - 4 шарнірно з'єднана з ексцентриковою шийкою ексцентрикового вала - 8. з можливістю обертання вала - 6 з передачею руху вала - 6 через раму - 4 валу - 8 із плоскопаралельним переміщенням рами - 4 з валами - 3 і з кулісами - 2 а також з тягарцями - 1 по окружності, с одночасною передачею обертання вала - 6 через колесо - 7 одній із шестерень - 5. а від одної шестерні - 5 і іншій шестерні - 5, з обертанням двох валів - 3 з кулісами - 2 і з тягарцями - 1 з однаковою кутовою швидкістю в протилежні сторони в протифазі щодо площини симетрії проведеної між валами - 3. кожний тягарець - 1 посаджений на кулісу - 2 і з'єднаний індивідуальною штангою повзуна - 9, посаджені на кулісу - 2, кожний повзун - 9 шарнірно з'єднаний індивідуальним важелем - 10 з індивідуальним повзуном - 11 посадженим на свій вал - 3, кожний повзун - 11 виконаний з кільцевим замком, у який введена індивідуальна вилка зв'язку - 12 з'єднуюча два повзуни - 13 посаджені на напрямні рами - 4 паралельні осям валів 3, кожний з повзунів-13 з'єднаний індивідуальною штангою - 14, кінець кожної штанги - 14 шарнірно з'єднаний індивідуальним важелем - 15 з індивідуальним повзуном - 16, посадженим на свою корінну шийку ексцентрикового вала - 6, 8 один з повзунів - 16 виконаний з кільцевим замком, у який введена вилка - 17 управління, з можливістю переміщення тягарців - 1 по кулісі 2 разом з повзунами - 9 від повороту важелів - 10 при переміщенні повзунів - 11 по валах - 3 разом з переміщенням зв'язку - 12 з повзунами - 13 і штангами - 14 при повороті важелів - 15 від переміщення повзунів - 16 з вилкою управління - 17. Інерційна машина обертання працює в такий спосіб. При рівномірному обертанні ексцентрикового вала - 6 рух ексцентрикової шийки ексцентрикового вала - 6 через раму - 4 передається ексцентриковій шийці ексцентрикового вала - 8 і ексцентриковий вал - 8 обертається синхронно з ексцентриковим валом - 6, а рама - 4 рухається пласко-паралельно по окружності. Обертання колеса - 7, маточина якого закріплена на ексцентриковому валу - 6 зуби якого зачеплені із зубами шестерні - 5 передається суміжній з ним шестерні - 5 з валом - 3 і кулісою - 2 з тягарцем - 1, а від суміжної з колесом - 7 шестерні - 5 обертання передається другій шестерні - 5 із другим валом - 3 із другою кулісою - 2 і другим тягарцем - 1. У результаті цього друга шестерня - 5 з другим валом - 3 і з другою кулісою - 2 із другим тягарцем - 1 обертаються в протилежну сторону в протилежній фазі руху щодо обертання першого вала - 3 з першою кулісою - 2 і першим тягарцем - 1. У результаті рівномірного обертання кожного тягарця - 1 на тягарець - 1 діють нормальні сили інерції Fiн, які прикладені із центра тягарця - 1 і направлені по радіусу від осі обертання свого вала – 3, векторна сума яких FiнΣ прикладена до рами - 4 (і ексцентрикової шийки ексцентрикового вала - 6) і направлена по осі симетрії двох тягарців - 1 а величина гармонічно змінюється (як у методу одержання направлених сил інерції Лончестера). Тому що лінію дії вектора сумарних сил інерції FiнΣ плоско-паралельно переміщають разом з рамою - 4 по окружності, фази руху яких відповідають фазам повороту ексцентрикових валів 6, 8 то при зміні напрямку вектора сумарних сил інерції FiнΣ на протилежний напрямок проекції вектора швидкості руху ексцентрикових шийок ексцентрикових валів - 6, 8 на лінію дії сумарних сил інерції FiнΣ також змінюється на протилежне, у наслідку чого напрямок проекція вектора швидкості завжди збігається з напрямком вектора сумарних сил інерції FiнΣ, що збільшує або підтримує на заданому рівні швидкість обертання ексцентрикових валів - 6, 8 силами інерції FiнΣ. Для регулювання одержуваних сил інерції FiнΣ вилкою управління - 17 переміщають повзуни - 16 уздовж корінних шийок ексцентрикових валів - 6, 8, які повертають важелі - 15 з переміщенням штанг - 14 з повзунами - 13 і зв'язком - 12 з повзунами - 11 уздовж валів - 3 з поворотом важелів - 10 і з переміщенням повзунів - 9 з тягарцями - 1 уздовж куліс - 2, що змінює величину радіуса обертання тягарців - 1 зі зміною величини одержуваних сил інерції FiнΣ, у тому числі й таким чином, що сили інерції FiнΣ можуть змінити напрямок своїх дій на протилежні (діяти проти руху валів - 6, 8 з рамою - 4) і гальмувати обертання. На Фіг. 2 і Фіг. 3 представлені положення векторна сума сил інерції FiнΣ і напрямок швидкості ексцентрикових шийок ексцентрикових валів - 6, 8 з рамою - 4 (проекція якої постійно направлена убік напрямку вектора сумарних сил інерції FiнΣ) На Фіг. 2 при напрямку вектора сумарних сил інерції FiнΣ направленого вгору, а на Фіг. 3 униз. Ефективність використання наявних потенціалів Інерційної машини обертання можна порівняти з ефективністю використання наявних потенціалів найпоширенішого джерела обертання - чотиритактного двигуном внутрішнього згоряння. У чотиритактного двигуна 3 UA 78589 U 5 10 15 20 25 30 35 40 45 50 55 60 внутрішнього згоряння максимальний тиск спалаху становить (виходячи з вимоги надійності 2 роботи двигуна) 60 кг/см (докладніше див. книгу за редакцією Моргулиса Ю.Л. Двигуни внутрішнього згоряння. - М. Машинобудування 1959. див. текст на стор. 228) при середньому 2 індикаторному тиску 3 кг/см , (докладніше див. книгу Орлина А.С. Двигуни внутрішнього згоряння. Конструювання та розрахунки поршневих і комбінованих двигунів. - М. Машинобудування. 1985. див. таблицю на С. 17) що складає 3/60=1/20. Маючи чотиритактний цикл роботи, в якому тільки один з тактів є робочим, а три інші с службовими для створення можливості здійснення робочого такту, що складає 1/20 * 1/4=1/80. Тепловий ккд двигуна внутрішнього згоряння складає 1/2, у такий спосіб 1/80 * 1/2=1/160. Саме через занадто низьку ефективність використання наявних потенціалів 1/160=0,00625 машин - джерел енергії пояснюється повне виснаження запасів органічних паливних ресурсів за 100 років їх активного використання, які були накопичені біосферою планети за мільйони років. В інерційній машині обертання величина сил інерції гармонічно змінюється, що складає від максимального значення, 1/3, 14. Величина максимальних значень сил інерції становить 1/5 від максимальних навантажень при спалаху палива в циліндрі двигуна внутрішнього згоряння, що з урахуванням надійності роботи машини цілком прийнятне 1/3,149 * 1/5=1/15,7=0,0637. Інерційна машина обертання має один робочий такт, таким чином, порівняльна ефективність використання наявних потенціалів складе 1/15,7/ 1 /160=10. Інерційна машина обертання в 10 разів більш ефективно використовує наявний у неї потенціал для здійснення своєї роботи. У наш час широке розповсюдження одержала практика використання як багатоциліндрового рядного, так і багатоциліндрового V-подібного двигунів із числом циліндрів у рядному двигуні 2, 4, 8, а в V-подібному двигуні 6, 8, 10, 16 для автомобілів і до 20 циліндрів і більше у тепловозному двигуні. При цьому частка вартості кожного із циліндрів у багатоциліндровому двигуні зменшується в 1,5 рази при збільшенні числа циліндрів від 1 до 2 і далі від 2 до 4, та від 4 до 8 зменшується в 1,3 разу, як і при переході від рядного до V-подібного (в 1,5 рази). У такий спосіб рядний 2-циліндровий двигун має вартість в 1,5 рази більшу вартості одноциліндрового двигуна, рядний 4-циліндровий двигун в 2 рази більшу, V-подібний 6-циліндровий в 3 рази більшу, а V-подібний 8-циліндровий 4 рази більшу вартість у порівнянні з одноциліндровим двигуном. Крім того, у вартості одержуваної механічної енергії вартість (одноциліндрового) двигуна становить 60 % а вартість споживаного двигуном палива становить 40 %. Вартість експлуатації одноциліндрового двигуна складає 1,6 від вартості одноциліндрового двигуна. 4циліндрового рядного двигуна складає 4,4 від вартості одноциліндрового двигуна при вартості експлуатації 4 одноциліндрових двигунів 6,4 від вартості одноциліндрового двигуна, а вартість експлуатації V-подібного 8-циліндрового складає 8,8 від вартості одноциліндрового двигуна при вартості експлуатації 8 одноциліндрових двигунів 12,8 вартості одноциліндрового двигуна. У стільки - же як і вартість багатоциліндрових двигунів зростають їхні розміри та їх вага. Саме високою ефективністю за критерієм вартості 8-циліндрового V-подібного двигуна пояснюється їхнє часте використання, у якого вартість споживаного палива вище вартості самого двигуна. В інерційній машині обертання паливо відсутнє взагалі, але її механізм за складністю зіставлюваний з механізмами 8-циліндрового V-подібного двигуна, як її розміри з вагою та вартістю (рівна вартості 4 одноциліндрових двигунів), але маючи в 10 разів вищу ефективність використання наявного потенціалу при однаковій одержуваній потужності. Інерційна машина обертання, у якої представлений пристрій, рівнозначний 8-циліндровому V-подібному двигуну, і з цієї причини (високої ефективності) нема зиску робити її багатовідсіковою, а у автономній (без мережі заправних станцій) експлуатація її вартості щодо зростаючої вартості експлуатації 8циліндрового V-подібного двигуна. В інерційну машину переміщення включені: два тягарці - 1, встановлені кожний на своїй індивідуальній кулісі - 2, кожна куліса - 2 виконана разом з валом - 3, опори якого розташовані в рамі - 18, на носок вала - 3 посаджена шестерня - 5, зуби двох шестерень - 5 зачеплені між собою, рама - 18 закріплена на ексцентриковій шийці ексцентрикового вала - 6, на ексцентриковій шийці ексцентрикового вала - 6 посаджене з можливістю обертання колесо - 7, яке посаджено на ділянку розташовану поза ділянкою між щоками ексцентрикового вала - 6, маточина колеса - 7 з'єднана з маточиною колеса - 19, зуби колеса - 19 зачеплені із зубами колеса - 20, посадженого з можливістю обертання на корінну шийку ексцентрикового вала - 6, і маточина колеса - 20 загальмована, з можливістю обертання вала - 6 з рамою - 18 з 4 UA 78589 U 5 10 15 20 25 30 35 40 45 50 55 60 одночасною передачею обертання вала - 6 через колесо - 7, 19, 20 одної із шестерень - 5, а від неї й іншій шестірні - 5, з обертанням двох валів - 3 з кулісами - 2 і з тягарцями - 1 з однаковою кутовою швидкістю в протилежні сторони в протифазі щодо площини симетрії проведеної між осями валів - 3, кожний тягарець - 1 посаджений на кулісу - 2 і з'єднаний зі штангою повзуна - 9, посаджених на кулісу - 2, повзун - 9 шарнірно з'єднаний важелем - 10 з повзуном - 11, посадженим на вал - 3, і повзун - 11 виконаний з кільцевим замком, у який введена вилка зв'язку - 12 з'єднуюча два повзуни - 13, посаджені на напрямні рами - 18, паралельні осям валів - 3, один з повзунів - 13 з'єднаний зі штангою - 14, кінець штанги - 14 шарнірно з'єднаний важелем 15 з повзуном - 16, повзун - 16 посаджений на корінну шийку ексцентрикового вала - 6, повзун 16 виконаний з кільцевим замком, у який введена вилка - 17 управління, з можливістю переміщення тягарців - 1 по кулісі - 2 разом з повзунами - 9 від повороту важелів - 10 при переміщенні повзунів - 11 по валах - 3 разом з переміщенням зв'язку - 12 з повзунами - 13 і штангою - 14 при повороті важеля - 15 від переміщення повзуна - 16 з вилкою управління - 17. Інерційна машина переміщення працює в такий спосіб. При рівномірному обертанні ексцентрикового вала - 6 разом з рамою - 18 обертання ексцентрикового вала - 6 щодо нерухомого колеса - 20 передається від колеса - 19 через колесо - 7 одній шестерні - 5 з валом - 3 і кулісою - 2 з тягарцем - 1, а від неї й другій шестерні 5 із другим валом - 3 із другою кулісою - 2 і другим тягарцем - 1. У результаті цього друга шестерня - 5 із другим валом - 3 і із другою кулісою - 2 і із другим тягарцем - 1 обертаються в протилежну сторону в протилежній фазі руху щодо обертання першого вала - 3 з першою кулісою - 2 і першим тягарцем - 1. У результаті рівномірного обертання кожного тягарця - 1 на тягарці - 1 діють нормальні сили інерції Fiн, які прикладені із центра тягарця - 1 і направлені по радіусу з осі обертання свого вала - 3, векторна сума яких FiнΣ направлена по осі симетрії двох тягарців - 1, а величина гармонічно змінюється (як у методу одержання направлених сил інерції Лончестера). Тому що лінію дії вектора сумарних сил інерції FiнΣ повертають разом з рамою - 18, фази руху яких відповідають фазам повороту ексцентрикового вала - 6, і при зміні напрямку вектора сумарних сил інерції FiнΣ на протилежний проекція на лінію симетрії годографа - 21 сумарних сил інерції FiнΣ напрямку одиничного вектора системи відліку, пов'язаної з рамою - 18, також зміниться на протилежний разом із проекцією вектора сумарних сил інерції FiнΣ на лінію симетрії годографа - 21 завжди направлена в одну сторону. Фіг. 5 і Фіг. 6 - показаний напрямок векторної суми сил інерції FiнΣ при різних положеннях ексцентрикового вала - 6. На Фіг. 7 показаний годограф вектора сумарних сил інерції FiнΣ. Регулювання величини переміщуваних сил - 22 аналогічне регулюванню інерційної машини обертання. Інерційну машину переміщення можна застосовувати на левітуючій платформі, яка являє собою трикутну основу, на якій закріплено 6 інерційних машин переміщення, розташованих по дві у вершинах трикутника, і в кожній вершині вектори сил інерції направлені на вершину піраміди, утворену трикутною основою, та у кожній парі сил інерції у вершинах основи вектора двох сил інерції нахилено один до другого та одна інерційна машина обертання для одержання обертання. Левітуюча платформа працює в такий спосіб. Інерційна машина обертання є джерелом обертання та обертає вали 6 інерційних машин переміщення. Управлінням величинами одержуваних сил інерції здійснене управління рухом левітуючої платформи. При нахилі левітуючої платформи вона починає переміщатися в горизонтальній площині у бік нахилу або сповільнювати свій рух при її нахилі у бік, протилежний напрямку горизонтального руху. При зменшенні величин сил інерції кожної парної сторони кута трикутника зі збільшенням величини кожної непарної сторони трикутника левітуюча платформа буде обертатися навколо своєї вертикальної осі. При збільшенні величин всіх сил інерції левітуюча платформа буде переміщатися вгору, а при зменшенні - униз. У процесі своєї роботи левітуюча платформа не взаємодіє для можливості свого руху з навколишнім середовищем, по цьому вона може переміщатися в атмосфері-стратосфері, атмосфері-тропосфері, гідросфері, космосі із значними швидкостями, а негативний вплив навколишнього середовища цілком переборний для її безпечної експлуатації. Ефективність левітуючої платформи неможливо оцінити у наслідку повної відсутності навіть віддалених аналогів. Техніко-економічний ефект використання способу перетворення сил інерції в сили тяги полягає в розширенні технічних можливостей важільних механізмів, отриманні необмеженого джерело механічних сил, що не робить виливу на навколишнє середовище, що значно підвищує ефективність використання машин - джерел енергії, отримана можливість використання левітації для руху машин. 5 UA 78589 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 25 30 35 40 Спосіб перетворення сил інерції в сили тяги, в якому два тягарці встановлені кожний на своїй індивідуальній кулісі, кожна куліса з'єднана із своїм індивідуальним валом, два вали паралельні між собою, на носку кожного вала встановлена індивідуальна циліндрична зубчата шестірня, зуби двох шестірень зачеплені між собою, в якому обертають один з індивідуальних валів, через зубчаті шестерні обертання передають другому валу, у результаті цього два вали обертають разом з кулісами та тягарцями з однаковою кутовою швидкістю в протилежних напрямках у протифазі щодо площини симетрії двох валів, і в результаті обертання тягарців на тягарці діють нормальні радіально направлені сили інерції, векторну суму яких одержують у вигляді направленого вектора сил інерції, лінія дії якого проведена через лінію симетрії двох тягарців, а величину вектора сумарних сил інерції гармонічно змінюють, який відрізняється тим, що підшипникові опори валів установлені на рамі, пов'язаній з ексцентриковою шийкою ексцентрикового вала, зуби одної із шестерень зачеплені із зубами колеса, встановленого на ділянці ексцентрикової шийки, розташованої поза ділянкою між двома щоками ексцентрикового вала, і для перетворення в обертаючі сили (тяги) рама шарнірно встановлена на ексцентриковій шийці ексцентрикового вала та шарнірно встановлена на ексцентриковій шийці другого ексцентрикового вала, а колесо закріплене на ексцентриковій шийці ексцентрикового вала, а для перетворення в переміщаючі сили (тяги) рама закріплена на ексцентриковій шийці ексцентрикового вала, а колесо посаджене з можливістю обертання на ексцентрикову шийку ексцентрикового вала та маточина колеса з'єднана з маточиною другого колеса, посадженого на цю ексцентрикову шийку ексцентрикового вала, та зуби другого колеса зачеплені із зубами третього колеса, посадженого з можливістю обертання на корінну шийку цього ексцентрикового вала, але третє колесо загальмоване, в якому обертають ексцентриковий вал навколо осі його корінних шийок і через зубчате колесо та шестерні обертання ексцентрикового вала передають валам і кулісам з тягарцями на рамі, і від руху тягарців одержують направлені сили інерції, і при перетворенні в обертаючі сили (тяги) при обертанні ексцентрикового вала лінію дії сумарних сил інерції плоско-паралельно переміщають по окружності щодо осі обертання ексцентрикового вала, з рухом лінії дії сил інерції, кінематично пов'язаної з обертанням ексцентрикового вала та передачею на ексцентрикову шийку ексцентрикового вала сумарних сил інерції, причому при зміні напрямку вектора сумарних сил інерції на протилежне в системі відліку рами раму переміщають у системі відліку опор ексцентрикового вала так, що напрямок проекції вектора швидкості руху ексцентрикової шийки ексцентрикового вала на лінію дії вектора сумарних сил інерції постійно збігається з напрямком вектора сумарних сил інерції, а при перетворенні в переміщаючі сили (тяги) при обертанні ексцентрикового вала лінію дії сумарних сил інерції обертають щодо осі обертання ексцентрикового вала, з обертанням лінії дії сил інерції кінематично пов'язаної з обертанням ексцентрикового вала та передачею на корінні опори ексцентрикового вала сумарних сил інерції, причому при зміні напрямку вектора сумарних сил інерції на протилежний в системі відліку рами, раму з її системою відліку також повертають у системі відліку опор корінних шийок ексцентрикового вала зі зміною напрямку проекції на вісь симетрії годографа вектора сумарних сил інерції, пов'язаного із системою відліку рами так, що напрямок проекції вектора сумарних сил інерції на лінію симетрії годографа завжди направлено в одну сторону. 6 UA 78589 U 7 UA 78589 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for transformation of forces of inertia to driving force
Автори англійськоюChuhui Volodymyr Leonidovych
Назва патенту російськоюСпособ преобразования сил инерции в силу тяги
Автори російськоюЧугуй Владимир Леонидович
МПК / Мітки
МПК: F03G 3/08
Мітки: перетворення, спосіб, тяги, сили, сіль, інерції
Код посилання
<a href="https://ua.patents.su/10-78589-sposib-peretvorennya-sil-inerci-v-sili-tyagi.html" target="_blank" rel="follow" title="База патентів України">Спосіб перетворення сил інерції в сили тяги</a>
Спосіб перетворення сил інерції в крутний момент
Номер патенту: 45581
Опубліковано: 15.04.2002
Автор: Чугуй Володимир Леонідович
МПК: F03G 3/00
Мітки: інерції, спосіб, крутний, перетворення, момент, сіль
Формула / Реферат:
Спосіб перетворення сил інерції в крутний момент, в якому отримують сили інерції з середніми за період руху кривошипно-коромислового механізму векторними величинами, більшими нуля, для чого здійснюють обертання кривошипного вала навколо осі корінних шийок кривошипного вала, разом зі зворотно-кутовим поворотом шатуна, кривошипна голівка якого досаджена на шатунну шийку кривошипного вала, а коромислова голівка якого посаджена на шатунний...
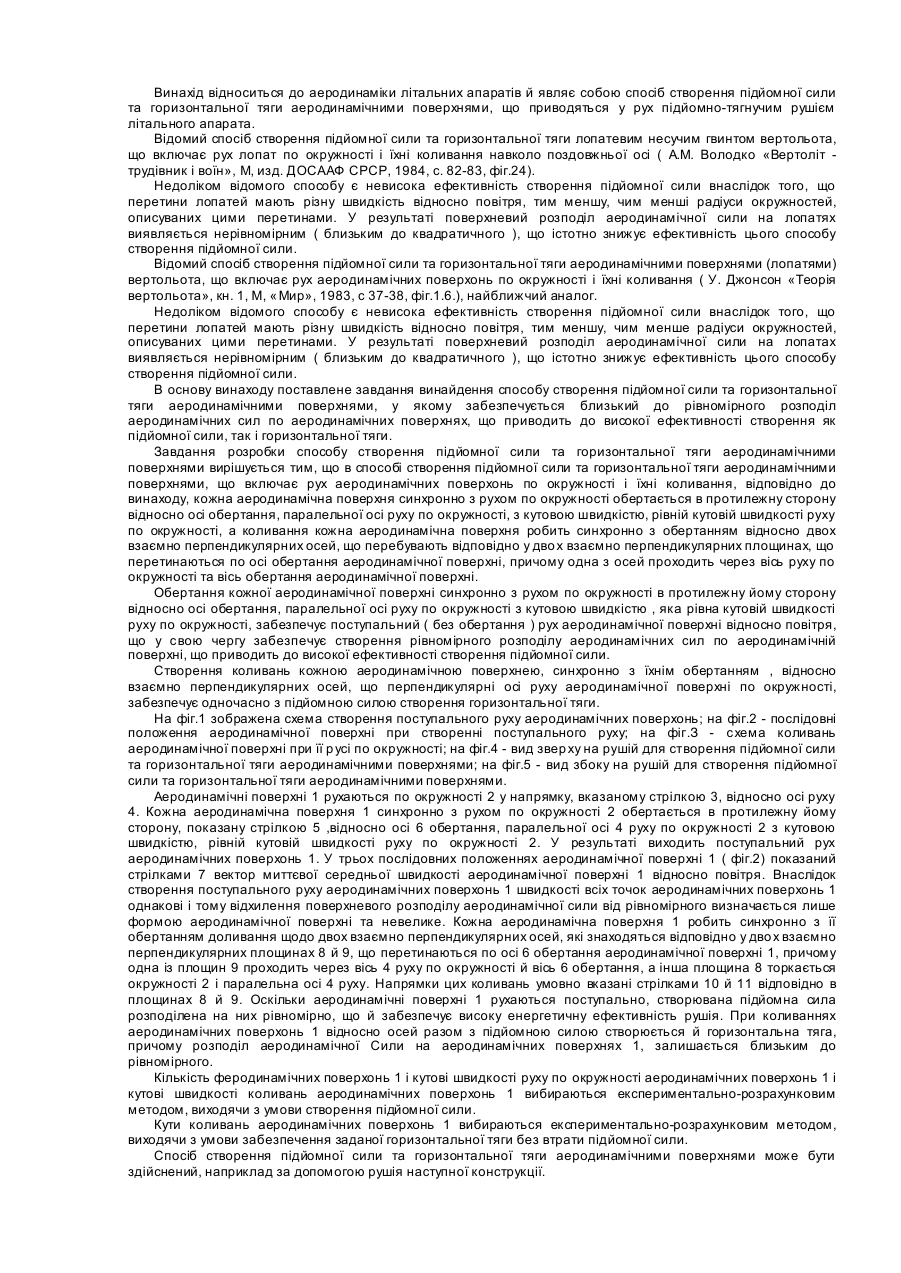
Спосіб створення піднімальної сили і горизонтальної тяги
Номер патенту: 74513
Опубліковано: 15.12.2005
Автори: Дєнісов Анатолій Алєксєєвіч, Акаро Андрєй Ігорєвіч, Мєдвєдєв Міхаіл Міхайловіч, Зєлінскій Анатолій Міхайловіч
МПК: B64C 27/00, B64C 11/00
Мітки: піднімальної, сили, тяги, горизонтально, спосіб, створення
Формула / Реферат:
Спосіб створення піднімальної сили й горизонтальної тяги аеродинамічними поверхнями, що включає рух аеродинамічних поверхонь по окружності і їхні коливання, який відрізняється тим, що кожну аеродинамічну поверхню синхронно з рухом по окружності обертають в протилежну йому сторону відносно осі обертання, паралельної осі руху по окружності, з кутовою швидкістю, рівною кутовій швидкості руху по окружності, а коливання кожної аеродинамічної...
Спосіб збільшення сили тяги судна
Номер патенту: 78298
Опубліковано: 15.03.2007
Автори: Чорний Анатолій Петрович, Хільський В'ячеслав Петрович, Петросов Валерій Альбертович, Казакевіч Андрєй Вячеслав
МПК: B63B 1/16
Мітки: сили, судна, тяги, збільшення, спосіб
Формула / Реферат:
1. Спосіб збільшення сили тяги судна, що полягає у обладнанні його крім рушія додатковим пристроєм, який відрізняється тим, що додатковий пристрій виконують у вигляді крил, які розташовують зовні корпусу судна у вертикальних площинах нижче ватерлінії по потоку обтікання і на криволінійних у горизонтальній площині частинах бортів, закріплюючи згадані крила до бортів на відстані від них та між собою.2. Спосіб за п. 1, який відрізняється...
Пристрій для виміру сили тяги
Номер патенту: 82848
Опубліковано: 26.05.2008
Автор: Бугрін Володимир Миколайович
МПК: G01L 5/13, G01L 1/22, B64D 27/26
Мітки: пристрій, виміру, сили, тяги
Формула / Реферат:
1. Пристрій для виміру сили тяги, що містить порожню циліндричну пружно деформовану деталь, що сприймає навантаження, у порожнині якої розташовані тензорезистори, який відрізняється тим, що порожнина деталі виконана у вигляді поперечного наскрізного паза, який асиметричний відносно її подовжньої осі, причому тензорезистори закріплені на поверхнях цього паза і орієнтовані уздовж цієї осі.2. Пристрій для виміру сили тяги за п. 1, який...
Спосіб перетворення вітродвигуном додаткової енергії повітряних потоків природної тяги в електричну або інші види енергії і пристрій для його здійснення
Номер патенту: 88388
Опубліковано: 12.10.2009
Автор: Рибак Володимир Васильович
МПК: F03D 1/00, F03D 9/00, F03D 7/00
Мітки: повітряних, додаткової, види, тяги, потоків, інші, електричну, здійснення, енергії, природної, перетворення, вітродвигуном, пристрій, спосіб
Формула / Реферат:
1. Спосіб перетворення вітродвигуном додаткової енергії повітряних потоків природної тяги в електричну або інші види енергії, який відрізняється тим, що струмені тягових повітряних потоків через повітроводи всередині обертової головки вітродвигуна та всередині лопатей вітрового колеса вітродвигуна спрямовують для їх витоку з кінців лопатей вітродвигуна в сторону, протилежну обертовому руху лопатей вітрового колеса вітродвигуна, яке збільшує...
Попередній патент: Спосіб прогнозування перебігу вагітності у жінок з прееклампсією
Наступний патент: Спосіб інгібування активності staphylococcus aureus лінкоміцином
Випадковий патент: Передній коток посівної секції