Спосіб перетворення сил інерції в крутний момент
Формула / Реферат
Спосіб перетворення сил інерції в крутний момент, в якому отримують сили інерції з середніми за період руху кривошипно-коромислового механізму векторними величинами, більшими нуля, для чого здійснюють обертання кривошипного вала навколо осі корінних шийок кривошипного вала, разом зі зворотно-кутовим поворотом шатуна, кривошипна голівка якого досаджена на шатунну шийку кривошипного вала, а коромислова голівка якого посаджена на шатунний палець, навколо осі шатунного пальця, і разом зі зворотно-кутовим поворотом коромисла, шатунна голівка якого посаджена на шатунний палець, а голівка основи якого досаджена на коромисловий палець, навколо осі коромислового пальня, який відрізняється тим, що додатково здійснюють обертання коромислового пальця, який посаджений в раму, разом із рамою, навколо осі корінних шийок кривошипного вала, в напрямі: з коромислового пальця-на шатунний палець, з кутовою швидкістю відносно шатунної шийки кривошипного вала, величина якої більша нуля.
Текст
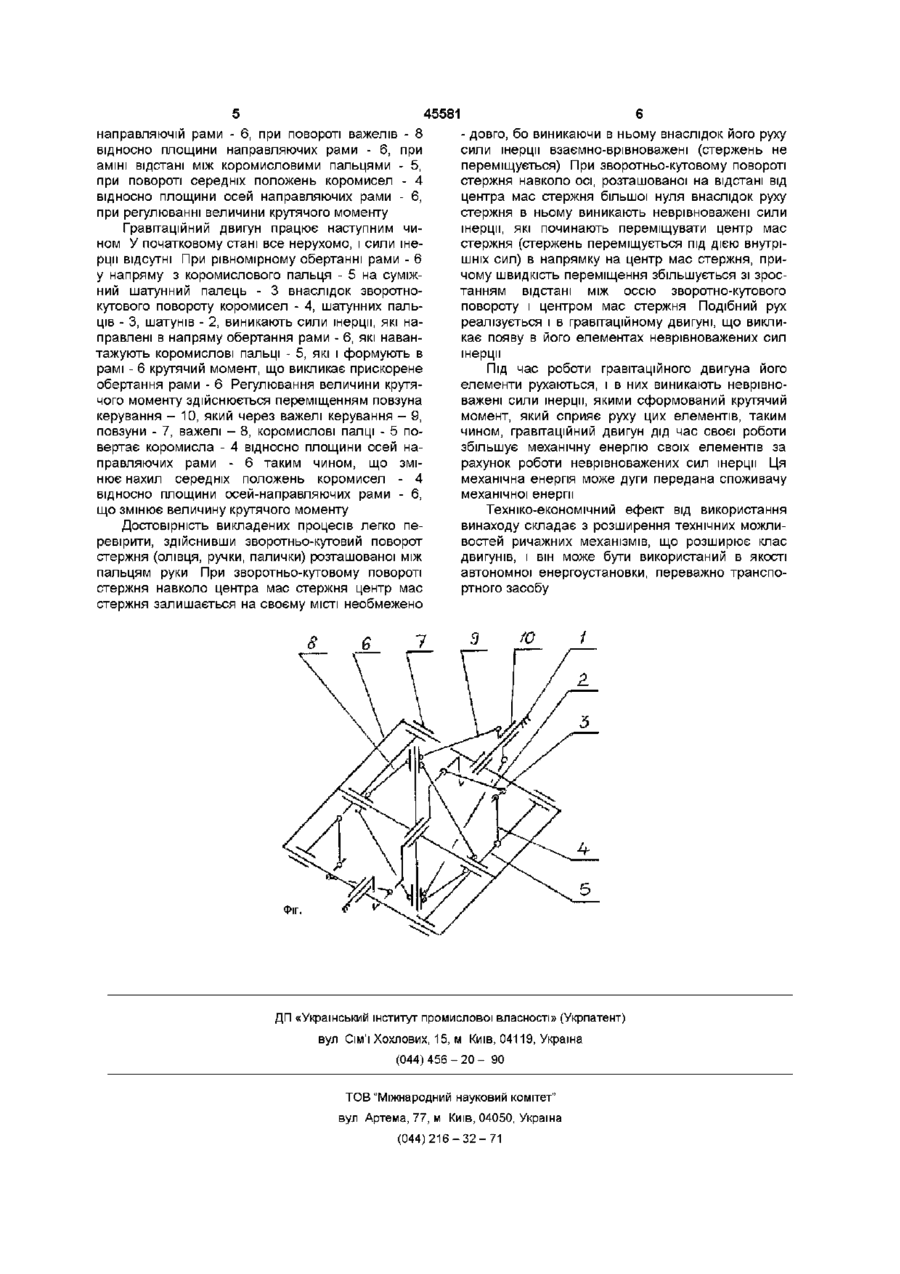
Спосіб перетворення сил інерції в крутний момент, в якому отримують сили інерції з середніми за період руху кривошипно-коромислового механізму векторними величинами, більшими нуля, для чого здійснюють обертання кривошипного вала навколо осі корінних шийок кривошипного вала, разом зі зворотно-кутовим поворотом шатуна, кривошипна голівка якого досаджена на ша тунну шийку кривошипного вала, а коромислова голівка якого посаджена на шатунний палець, навколо осі шатунного пальця, і разом зі зворотнокутовим поворотом коромисла, шатунна голівка якого посаджена на шатунний палець, а голівка основи якого досаджена на коромисловий палець, навколо осі коромислового пальня, який відрізняється тим, що додатково здійснюють обертання коромислового пальця, який посаджений в раму, разом із рамою, навколо осі корінних шийок кривошипного вала, в напрямі з коромислового пальця-на шатунний палець, з кутовою швидкістю відносно шатунної шийки кривошипного вала, величина якої більша нуля Винахід відноситься до гравітаційних двигунів, які перетворюють сили інерції, що виникають під час з во ротно-кутового повороту гравітаційних зарядів (грузів), у механічну енергію, і він може бути використаний в автономній енергоустановці, переважно яка встановлена на транспортному засобі Відомий спосіб перетворення сил від тиску робочого тіла в циліндрі теплового двигуна в крутячий момент, в якому здійснюють обертання кривошипного вала, кривошипно-шатунного механізму навколо осі корінних шийок кривошипного вала, разом зі зворотно-кутовим поворотом шатуна, кривошипна головка якого посаджена на шатунну шийку кривошипного вала, а поршнева голівка якого посаджена на поршневий палець, навколо осі поршневого пальця, який посаджений у поршень, і разом зі зворотно-поступальним переміщенням поршня, якай посаджений в циліндрову втулку, вздовж осі циліндрової втулки Під час реалізації способу перетворення сил від тиску робочого тіла в циліндрі теплового двигуна в крутячий момент поршень навантажують силами від тиску робочого тіла в циліндрі, і величина сил від тиску робочого тіла в циліндрі циклічно змінюється в залежності від кута повороту кривошипного вала, які передають від поршня через поршневий палець і шатун на кривошипний вал, на якому отримують крутячий момент Детальніше дивитись книгу Ю Б Моргуліса "Двигатели внутреннего сгорания", М Машгиз 1959, текст на стр 14 21, §2 "Принцип работы четырехтактного двигателя", фиг 6 на стр 15, фиг7 на стр 17, "Принцип работы двухтактного двигателя" фиг 8 на стр 19 (все по російські) Під час реалізації способу перетворення сил від тиску робочого тіла в циліндрі теплового двигуна в крутячий момент, в наслідок руху кривошипно-шатунного механізму, виникають сили інерції, величини яких змінюються у гармонічних залежностях Детальніше дивитись книгу Ю Б Моргуліса "Двигатели внутреннего сгорания" М Машгиз 1959, текст на стр 266 270 "уравновешивание", фиг 198 на стр 268 (все до російські) Недоліком відомого способу перетворення сил від тиску робочого тіла в циліндрі теплового двигуна в крутний момент, є рівняння нулю середньої за період руху кривошипно-шатунного механізму векторної величини сил інерції, при середній за цей період скалярній величині сил інерції більшої нуля Внаслідок того неможливо використання сил інерції, які виникають під час руху кривошипношатунного механізму, для їх перетворення в крутячий момент Відомий спосіб отримання середніх за період руху кривошипно-коромислового механізму векторних величин сил інерції більших нуля, для чого здійснюють обертання кривошипного вала навко 00 ю ю 45581 ло осі корінних шийок кривошипного вала, разом зі зворотньо-кутовим поворотом шатуна, кривошипна голівка якого посаджена на шатунну шийку кривошипного вала, а коромислова голівка якого посаджена на шатунний палець, навколо осі шатунного пальця, і разом зі зворотно-кутовим поворотом коромисла, шатунна голівка якого посаджена на шатунний палець, а голівка основи посаджена на коромисловий палець Під час реалізації відомого способу отримання середніх за період руху кривошипнокоромислового механізму векторних величин сил інерції більших нуля, сили інерції діють з центру мас коромисла, з центру мас шатунного пальця, з центру мас шатуна, віднесених до шатунного пальця, які направлені від осі коромислового пальця на вказані центри мас, і які передають через коромисло на коромисловий палець Детальніше дивитись книгу під редакцією Н А Анікіна "Справочник для изобретателя и рационализатора" М Машгиз 1959 текст на стр 87, 88 "Четырехзвенные шарнирные механизмы" Фиг 63а на стр 88 (все по російські) Недоліком відомого способу отримання середніх за період руху кривошипно-коромислового механізму сил інерції більших нуля є те, що в кривошипно-коромисловому механізмі, який призначений для перетворення обертання в зворотнокутовий поворот, коромисловий палець нерухомий Внаслідок того неможливо використання сил інерції з середніми за період руху кривошипнокоромислового механізму векторними величинами більшими нуля, для їх перетворення в крутячій момент В основу винаходу поставлена задача здійснення способу перетворення сил інерції в крутячий момент, в якому отримують сили інерції з середнім за період руху кривошипно-коромислового механізму векторними величинами більшими нуля, в якому, завдяки тому, що додатково здійснюють обертання коромислового пальця, який посаджений у раму, разом із рамою, навколо осі корінних шийок кривошипного вала в напряму з коромислового пальця на шатунний палець, з кутовою швидкістю відносно шатунної шийки кривошипного вала величина якої більше нуля, забезпечують отримання крутячого моменту на рамі, що обертається, і за рахунок того внаслідок роботи сил інерції отримують механічну енергію Поставлена задача вирішується способом перетворення сил інерції в крутячий момент, в якому отримують сили інерції з середніми за період руху кривошипно-коромислового механізму векторними величинами більшими нуля, для чого здійснюють обертання кривошипного вала навколо осі корінних шийок кривошипного вала, разом зі зворотнокутовим поворотом шатуна, кривошипна голівка якого посаджена на шатунну шийку кривошипного вала, а коромислова голівка якого посаджена на шатунний палець, навколо осі шатунного пальця, і разом зі зворотно-кутовим поворотом коромисла, шатунна голівка якого посаджена на шатунний палець, а голівка основи якого посаджена на коромисловий палець, навколо осі коромислового пальця, стосовно винаходу, додатково здійснюють обертання коромислового пальця, який посадже ний в раму, разом із рамою, навколо осі корінних шийок кривошипного вала, в напрямку з коромислового пальця на шатунний палець, з кутовою швидкістю відносно шатунної шийки кривошипного вала, величина якої більша нуля Спосіб перетворення сил інерції в крутячий момент реалізується в представленому гравітаційному двигуні Винахід пояснюється малюнком (Фіг), на якому показана кінематична схема гравітаційного двигуна В гравітаційний двигун (дивитись фіг) включені кривошипний вал - 1, два шатуна - 2 два шатунних пальця - 3, два коромисла - 4, два коромислових пальця - 5, рама - 6, ВІСІМ повзунів - 7, чотири важелі - 8, два важелі керування - 9, повзун керування - 10, на кожну шатунну шийку двокривошипного вала - 1 посаджена кривошипна голівка шатуна - 2, коромислова голівка шатуна - 2 посаджена на шатунний палець - 3, на який посаджена шатунна голівка коромисла - 4, голівка основи коромисла - 4 посаджена на коромисловий палець 5, який з'єднаний з трьома повзунами - 7, кожний з яких посаджений у направляючу рами - 6, рама - 6 виконана у вигляді трьох направляючих, осі яких паралельні між собою і розташовані в одній площині, причому через направляючі пропущений кривошипний вал - 1, ось корінних шийок якого перпендикулярна осям трьох направляючих рами 6, і три корінні шийки кривошипного вала - 1 посаджені в три направляючі рами - 6, крім того перпендикулярно площині направляючих рами-6 розташована ось четвертої направляючої рами - 6, яка пересічена з оссю корінних шийок кривошипного вала - 1 на середній корінній шийці, на четвертій направляючій рами - 6 посаджено два повзуни - 7, кожний з повзунів - 7 розташований на середній направляючій рами - 6, притому ця направляюча рами - 6 розташована в площині осей направляючих рами - 6, пов'язана двома важелями - 8 з двома повзунами - 7, які розташовані на четвертій направляючій рами - 6, причому в проекції на площину перпендикулярну осі кривошипного вала - 1 одна група елементів коромисловий палець 5, коромисло - 4, шатунний палець - 3, шатун - 2, два важелі - 8 - розташовані центральносиметрично до другої групи елементів другий коромисловий палець - 5, друге коромисло - 4, другий шатун - 3, два інших важелі - 8, відносно проекції осі корінних шийок кривошипного вала - 1, крім того кожний повзун - 7 на четвертій направляючій рами - 6 пов'язаний важелем керування - 9 з повзуном керування - 10, який посаджений на крайню корінну шийку кривошипного вала - 1, з можливістю обертання рами - 6 з коромисловими пальцями - 5 навколо осі корінних шийок кривошипного вала - 1, одночасно з обертанням кожного шатуна - 2 навколо осі відповідної шатунної шийки кривошипного вала - 1, одночасно з зворотно-кутовим поворотом кожного шатуна - 2 навколо осі ВІДПОВІДНОГО шатунного пальця - 3, одночасно з зворотнокутовим поворотом кожного коромисла - 4 навколо осі ВІДПОВІДНОГО коромислового пальця - 5, з можливістю переміщення повзуна керування - 10 вздовж осі корінних шийок кривошипного вала - 1, при ЗМІНІ відстані між повзунами - 7 на четвертій 45581 направляючій рами - 6, при повороті важелів - 8 відносно площини направляючих рами - 6, при аміні відстані між коромисловими пальцями - 5, при повороті середніх положень коромисел - 4 відносно площини осей направляючих рами - 6, при регулюванні величини крутячого моменту Гравітаційний двигун працює наступним чином У початковому стані все нерухомо, і сили інерції відсутні При рівномірному обертанні рами - 6 у напряму з коромислового пальця - 5 на суміжний шатунний палець - 3 внаслідок зворотнокутового повороту коромисел - 4, шатунних пальців - 3, шатунів - 2, виникають сили інерції, які направлені в напряму обертання рами - 6, які навантажують коромислові пальці - 5, які і формують в рамі - 6 крутячий момент, що викликає прискорене обертання рами - 6 Регулювання величини крутячого моменту здійснюється переміщенням повзуна керування - 10, який через важелі керування - 9, повзуни - 7, важелі - 8, коромислові палці - 5 повертає коромисла - 4 відносно площини осей направляючих рами - 6 таким чином, що змінює нахил середніх положень коромисел - 4 відносно площини осей-направляючих рами - 6, що змінює величину крутячого моменту Достовірність викладених процесів легко перевірити, здійснивши зворотньо-кутовий поворот стержня (олівця, ручки, палички) розташованої між пальцям руки При зворотньо-куто во му повороті стержня навколо центра мас стержня центр мас стержня залишається на своєму МІСТІ необмежено - довго, бо виникаючи в ньому внаслідок його руху сили інерції взаємно-врівноважені (стержень не переміщується) При зворотньо-кутовому повороті стержня навколо осі, розташованої на відстані від центра мас стержня більшої нуля внаслідок руху стержня в ньому виникають неврівноважені сили інерції, які починають переміщувати центр мас стержня (стержень переміщується під дією внутрішніх сил) в напрямку на центр мас стержня, причому швидкість переміщення збільшується зі зростанням відстані між оссю з во ротно-кутового повороту і центром мас стержня Подібний рух реалізується і в гравітаційному двигуні, що викликає появу в його елементах неврівноважених сил інерції Під час роботи гравітаційного двигуна його елементи рухаються, і в них виникають неврівноважені сили інерції, якими сформований крутячий момент, який сприяє руху цих елементів, таким чином, гравітаційний двигун дід час своєї роботи збільшує механічну енергію своїх елементів за рахунок роботи неврівноважених сил інерції Ця механічна енергія може дуги передана споживачу механічної енергії Техніко-економічний ефект від використання винаходу складає з розширення технічних можливостей ричажних механізмів, що розширює клас двигунів, і він може бути використаний в якості автономної енергоустановки, переважно транспортного засобу Фіг. ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044)456-20- 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Автори англійськоюChuhui Volodymyr Leonidovych
Автори російськоюЧугуй Владимир Леонидович
МПК / Мітки
МПК: F03G 3/00
Мітки: інерції, спосіб, перетворення, крутний, момент, сіль
Код посилання
<a href="https://ua.patents.su/3-45581-sposib-peretvorennya-sil-inerci-v-krutnijj-moment.html" target="_blank" rel="follow" title="База патентів України">Спосіб перетворення сил інерції в крутний момент</a>
Пристрій, що збільшує крутний момент, який розвиває педальний привід
Номер патенту: 20408
Опубліковано: 15.07.1997
Автор: Смертенко Арон Захарович
Мітки: збільшує, момент, пристрій, привід, розвиває, крутний, педальний
Формула / Реферат:
1. Устройство, увеличивающее крутящий момент, развиваемый педальным приводом, содержащее рычаг с педалью, установленный на подшипнике на оси, закрепленной в головке кривошипа, отличающееся тем, что в узел сочленения рычага с кривошипом введено устройство, допускающее вращение рычага относительно головки кривошипа лишь в одном направлении. 2. Устройство по п. 1, отличающееся тем, что устройство, допускающее вращение рычага...
Спосіб визначення приведеного моменту інерції механізму
Номер патенту: 42988
Опубліковано: 15.11.2001
Автори: Кулаков Павел Ігоревич, Кучерук Володимир Юрійович, Кухарчук Василь Васильович, Поджаренко Андрій Володимирович
МПК: G01M 1/10
Мітки: механізму, спосіб, визначення, приведеного, моменту, інерції
Формула / Реферат:
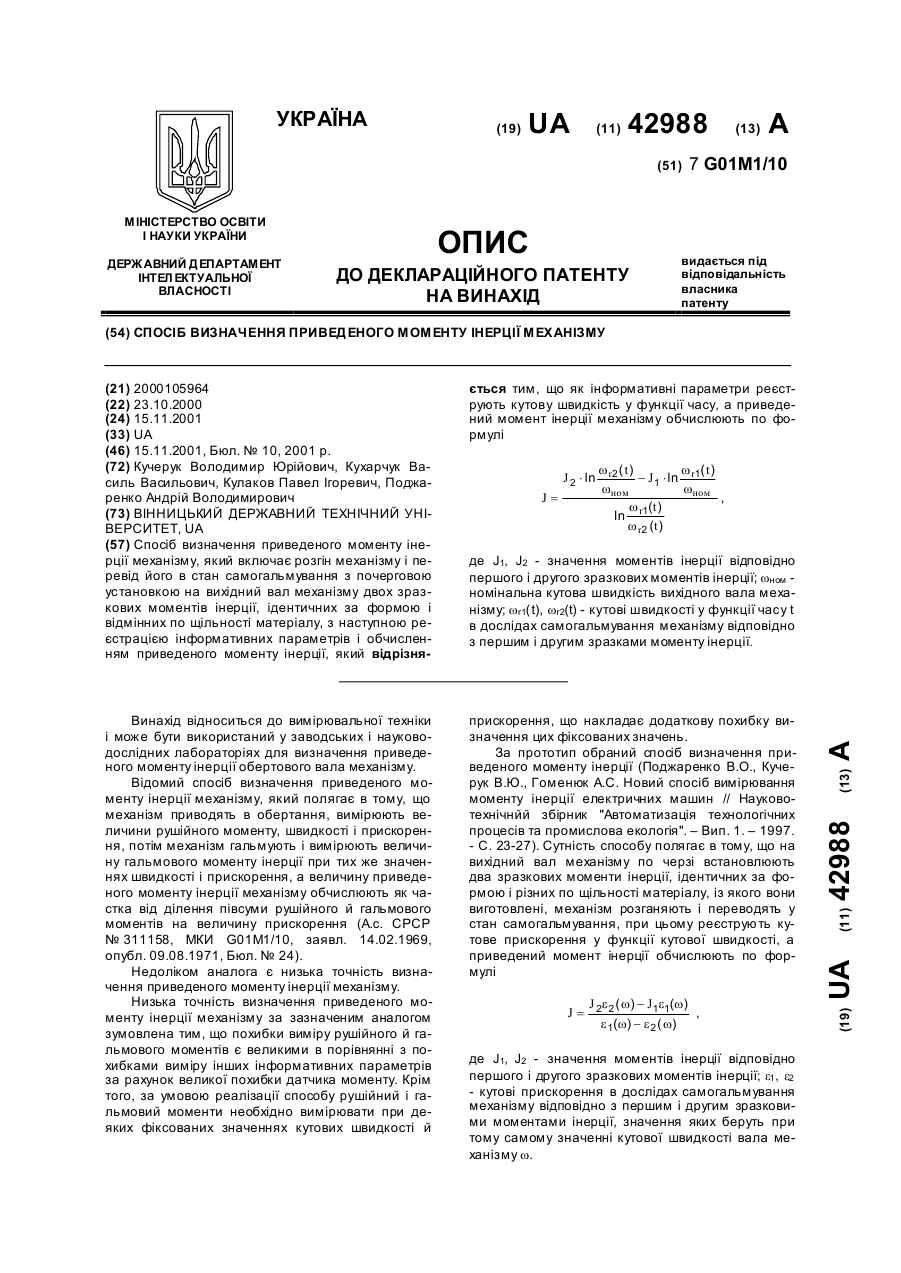
Спосіб визначення приведеного моменту інерції механізму, який включає розгін механізму і перевод його в стан самогальмування з почерговою установкою на вихідний вал механізму двох зразкових моментів інерції, ідентичних за формою і відмінних по щільності матеріалу, з наступною реєстрацією інформативних параметрів і обчисленням приведеного моменту інерції, який відрізняється тим, що як інформативні параметри реєструють кутову швидкість у...
Спосіб визначення моменту інерції ротора асинхронноі машини
Номер патенту: 31973
Опубліковано: 15.12.2000
Автори: Кухарчук Василь Васильович, Козловський Андрій Володимирович
МПК: G01L 3/00
Мітки: інерції, машини, асинхронноі, ротора, визначення, спосіб, моменту
Текст:
...ротора. На фіг. 1 представлено графічне зображення перехідних процесів у перетворювачі без урахування перехідних процесів у ОВ та з урахуванням цих перехідних процесів, на фіг. 2 зображено схему пристрою для реалізації способу, на фіг. З зображено алгоритм виконання способу, на фіг. 4 зображені часові діаграми роботи процесорного засобу вимірювання моменту інерції. Пристрій, який дозволяє реалізувати запропонований спосіб визначення пускового...
Маховик перемінного моменту інерції

Номер патенту: 31186
Опубліковано: 15.12.2000
Автори: Овсієнко Лариса Григорівна, Бондарєв Валентин Степанович, Тарасов Юрій Михайлович, Бондарєв Сергій Валентинович
МПК: F16F 15/30
Мітки: перемінного, моменту, інерції, маховик
Текст:
...аксіально рортзхора нї каналів S. Кгрпус і маховика гакріплений на валу 3 машини. Висота лопаток £ та 6 з одного торца, яка дорівнює h, більше висоти лопаток 3 та 7 а другого торца, яка дорівнює h f t як Ї/. ІНІМ ^ТЙ г" гва рагі;, отж^ h >= 2h^. Б порсжнині маховика анахо Маховик перемінного моменту інерції npsnrce т=:-с:м При пуск/ машини ибзргакгзїй момент від SSLT/ ЧІІНСИ. 9 перелаемся корпусу і маховика, який починає...
Спосіб визначення моменту інерції ротора
Номер патенту: 29304
Опубліковано: 16.10.2000
Автор: Сокол Володимир Моріцевич
МПК: G01M 1/10
Мітки: ротора, визначення, спосіб, інерції, моменту
Формула / Реферат:
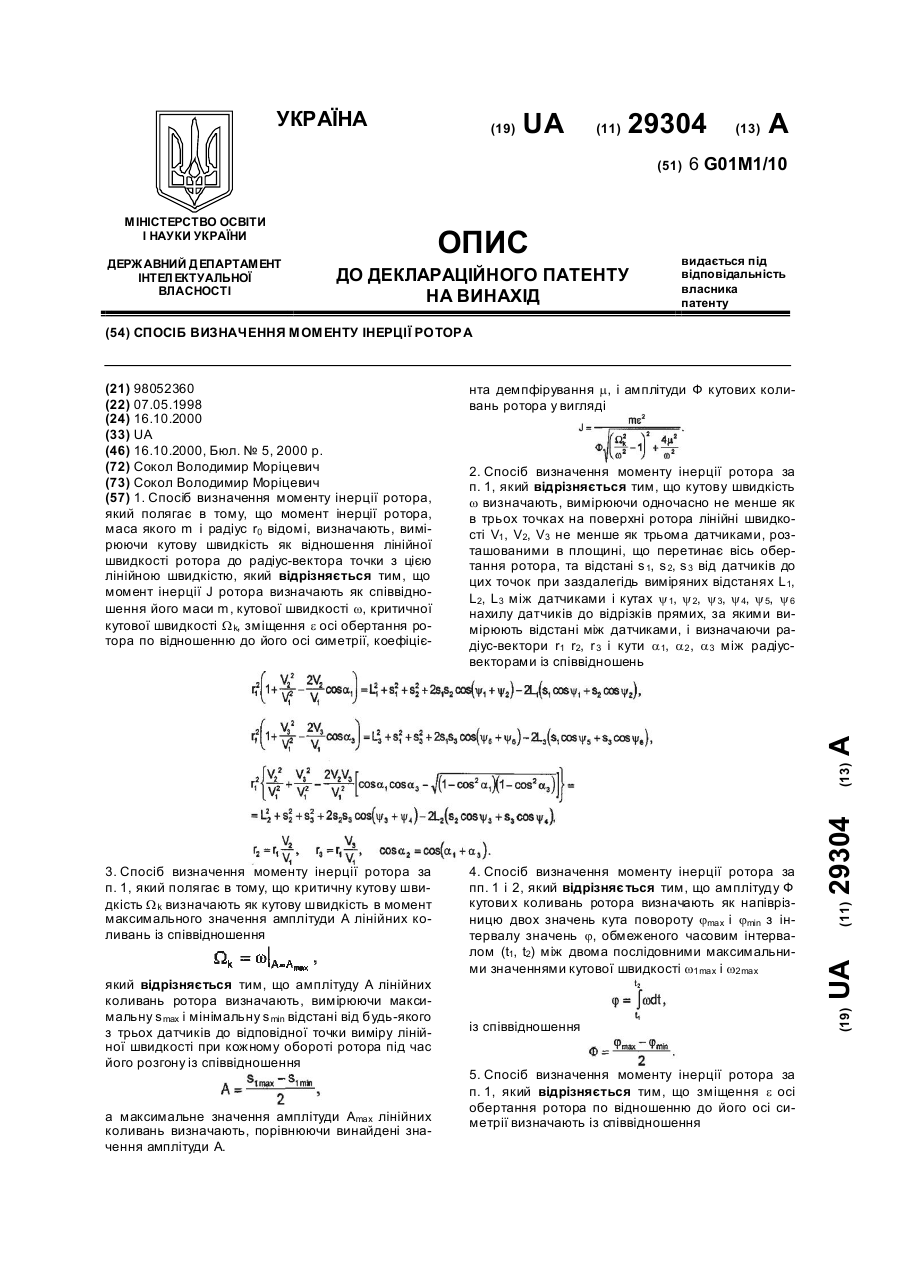
1. Спосіб визначення моменту інерції ротора, який полягає в тому, що момент інерції ротора, маса якого m і радіус r0 відомі, визначають, вимірюючи кутову швидкість як відношення лінійної швидкості ротора до радіус-вектора точки з цією лінійною швидкістю, який відрізняється тим, що момент інерції J ротора визначають як співвідношення його маси m, кутової швидкості, критичної...
Попередній патент: Шлакоутворююча суміш для обробки металевого розплаву
Наступний патент: Електротепловентилятор
Випадковий патент: Очисний комбайн з портальною корпусною підсистемою