Спосіб безконтактного динамічного визначення профілю твердого тіла
Номер патенту: 86765
Опубліковано: 25.05.2009
Автори: Хоффманн Манфред, Хоффманн Дітер, Вальтер Міхель Й., Брінкманн Андреас
Формула / Реферат
1. Спосіб безконтактного динамічного визначення профілю (Р) твердого тіла (1, 1а), зокрема визначення зносу, що виник на твердому тілі (1, 1а), при цьому тверде тіло (1, 1а) являє собою обертально-симетричне колесо (1а) транспортного засобу, в основному, циліндричної або кільцеподібної основної форми, в якому щонайменше один створений лазерним пристроєм (2) світловий промінь, розширений до лінійної світлової смуги (3, 3а, 3b, 3с, 3c1, 3с2, 3с3), проектують на щонайменше одну ділянку поверхні твердого тіла (1, 1а), яке переміщають по рейках (9) повз лазерний пристрій (2), і відбите від поверхні твердого тіла (1, 1а) світло (RL) фокусують в доданому лазерному пристрою (2) пристрої (5) відображення, оптична вісь (А-А) якого розташована під постійним тріангуляційним кутом (φ) до напрямку (О-О) проекції лазерного пристрою (2) і на постійній базовій відстані (В) від лазерного пристрою (2), і з високою, у порівнянні зі швидкістю (v) руху твердого тіла (1, 1а) частотою (f), реєструють за допомогою поверхневого світлоприймача (6), після чого по сигналах, що подаються світлоприймачем (6), з врахуванням тріангуляційного кута (φ) і базової відстані (В) за допомогою тригонометричних співвідношень і поправкових значень (Kv), які визначають відповідно до швидкості (v) руху твердого тіла (1, 1а), в пристрої обробки даних отримують виміряні значення (zB) профілю (Р), які зберігають в пристрої обробки даних у вигляді профілограми (PG), при цьому визначають часткові профілограми (PGa, PGb, PGc), які співвідносять зі сталою, протягом тривалого часу незмінною геометричною базовою величиною колеса (1а) транспортного засобу і отримують на основі цього загальну профілограму (GPG),
який відрізняється тим, що виміряні значення (zB) профілю (Р) отримують при додатковому зв'язку з поправковими значеннями (Ко), які визначають відповідно до ділянки поверхні твердого тіла (1, 1а), які є векторними, що визначаються в залежності від радіуса (R) твердого тіла коефіцієнтами і/або доданками, і для визначення часткових профілограм (PGa, PGb, PGc) використовують виміряне значення (zk), яке вибирають як максимум з щонайменше трьох виміряних значень (z1 z2, z3), що лежать на одній дузі кола з радіусом (R), які відповідають виміряній довжині лінійної світлової смуги (3с), і виміряні значення (z1 z2, z3) вимірюють на дузі кола, при цьому або
а) одночасно проектують на ділянки поверхні твердого тіла (1, 1а) щонайменше три світлових промені, розширених до лінійної світлової смуги (3c1, 3с2, 3с3) при заданій відстані (N1, N2), або
б) проектують на поверхню твердого тіла (1, 1а) один світловий промінь, розширений до лінійної світлової смуги (3с) із заданими інтервалами (∆t) часу в щонайменше три моменти (t1,t2, t3) часу.
2. Спосіб за п. 1, який відрізняється тим, що колесо (1а) транспортного засобу обертають зі сталою кутовою швидкістю (ω), яка складає менше 15с-1, переважно менше 6с-1.
3. Спосіб за п. 1 або 2, який відрізняється тим, що поправкові значення (Kv), що визначають відповідно до швидкості (v, ω) руху твердого тіла (1, 1а), є векторними, пропорційними швидкості (v, ω) руху коефіцієнтами і/або доданками.
4. Спосіб за п. 1 або 2, який відрізняється тим, що для визначення отриманих відповідно до швидкості (v, ω) руху поправкових значень (Kv) здійснюють корелятивний зв'язок між швидкістю (v, ω) руху і частотою (f) реєстрації відбитого світла (RL).
5. Спосіб за п. 1, який відрізняється тим, що профілограми (PG) визначають як часткові профілограми (PGa, РGb, PGc) з використанням щонайменше трьох лазерних пристроїв (2), що проектують світлові смуги (3, 3а, 3b, 3с, 3c1, 3с2, 3с3) на ділянки, які лежать на різних боках поверхні твердого тіла (1, 1а), і доданих їм пристроїв (5) відображення, часткові профілограми (PGa, PGb, PGc) зберігають в пристрої обробки даних і отримують на основі цього загальну профілограму (GPG).
6. Спосіб за будь-яким з пп. 1-5, який відрізняється тим, що профілограму (PG), часткові профілограми (PGa, PGb, PGc) і/або загальну профілограму (GPG) порівнюють з відповідно однією або декількома еталонними профілограмами (ВР1, ВР2) і реєструють відповідні відхилення (∆PG) від даної еталонної профілограми (ВР1,ВР2).
7. Спосіб за будь-яким з пп. 1-6, який відрізняється тим, що профілограму (PG), часткові профілограми (PGa, PGb, PGc), загальну профілограму (GPG), відповідну еталонну профілограму (ВР1, ВР2) і/або відповідні відхилення (∆РС) співвідносять зі сталою, протягом тривалого часу незмінною геометричною базовою величиною, такою як внутрішній діаметр (2*R) обода колеса, який не зношується.
8. Спосіб за п. 7, який відрізняється тим, що базову величину отримують щонайменше з трьох виміряних значень, які також отримують за допомогою безконтактних динамічних вимірювань на рухомому твердому тілі (1, 1а), здійснюваних так само, як і визначення профілограми (PG) або часткових профілограм (PGa, PGb, PGc).
9. Спосіб за п. 7 або 8, який відрізняється тим, що базовою величиною є радіус (R) обертально-симетричного тіла, що котиться, який визначають з наступної системи рівнянь:
R2=x12+z12 (1)
R2=x22+z22 (2)
R2=x32+z32 (3)
х1-х2=k*(х2-х3) (4),
де z1 z2, z3 є трьома відповідними ординаті (z) декартової системи координат виміряними значеннями довжини лінійної світлової смуги (3, 3а, 3b, 3с, 3c1, 3с2, 3с3), які лежать на одній дузі кола з радіусом (R), які отримані за допомогою однонаправлених світлових смуг (3, 3а, 3b, 3с, 3c1, 3с2, 3с3), які відповідають половині довжини хорди (sl1, sl2, sl3) дуги кола, де x1, х2, х3 - значення (х) абциси, що відповідають цим виміряним значенням, a k - коефіцієнт, що відповідає заданим інтервалам (∆t) часу або відстаням (N1, N2) між ділянками поверхні твердого тіла (1, 1а).
10. Спосіб за будь-яким з пп. 1-9, який відрізняється тим, що профілограму (PG), часткові профілограми (PGa, PGb, PGc), загальну профілограму (GPG), відповідну еталонну профілограму (ВР1, ВР2) і/або відповідні відхилення (∆PG) візуалізують в індикаторному пристрої, наприклад на дисплеї.
11. Спосіб за будь-яким з пп. 1-10, який відрізняється тим, що як світлоприймач (6) використовують пристрій, що подає оцифровані сигнали, такий як ПЗС-камера з тригерним керуванням.
12. Спосіб за будь-яким з пп. 1-11, який відрізняється тим, що як світлоприймач (6) використовують позиційно-чутливий детектор (позиційно-чутливий пристрій), такий як фотодіодна матриця.
13. Спосіб за будь-яким з пп. 1-12, який відрізняється тим, що світлова смуга (3, 3а, 3b, 3с, 3c1, 3с2, 3с3) має ширину (b) в діапазоні 0,3-6,5 мм, зокрема 0,8-2,2 мм.
14. Спосіб за будь-яким з пп. 1-13, який відрізняється тим, що світлова смуга (3, 3а, 3b, 3с, 3c1, 3с2, 3с3) має довжину (LB) в діапазоні 50-750 мм, зокрема 200-400 мм.
15. Спосіб за будь-яким з пп. 1-14, який відрізняється тим, що тріангуляційний кут (φ) має значення в діапазоні 15-40°, зокрема 20-30°.
16. Спосіб за будь-яким з пп. 1-15, який відрізняється тим, що частота (f), з якою за допомогою світлоприймача (6) реєструють відбите від поверхні твердого тіла (1, 1а) світло (RL), лежить в діапазоні 25 Гц-100 кГц, переважно 1-10 кГц.
17. Спосіб за будь-яким з пп. 1-16, який відрізняється тим, що швидкість (v) поступального руху твердого тіла складає менше 3,5 м/с, переважно менше 1,5 м/с.
18. Спосіб за будь-яким з пп. 1-17, який відрізняється тим, що середня робоча відстань (L) між лазерним пристроєм (2) і/або пристроєм (5) відображення і ділянкою поверхні твердого тіла (1, 1а), на яку проектують світлову смугу (3, 3а, 3b, 3с, 3c1, 3с2, 3с3), лежить в діапазоні 20-650 мм, зокрема 150-350 мм.
19. Спосіб за будь-яким з пп. 1-18, який відрізняється тим, що базова відстань (В) між пристроєм (5) відображення, зокрема центром фокусуючої лінзи (4) пристрою (5) відображення, і оптичною віссю (О-О) лазерного пристрою лежить в діапазоні 30-450 мм, зокрема 60-270 мм.
20. Спосіб за будь-яким з пп. 1-19, який відрізняється тим, що профілограма (PG), часткові профілограми (PGa, PGb, PGc), загальна профілограма (GPG), відповідна еталонна профілограма (ВР1, ВР2) і/або відповідні відхилення (∆РС) мають розрізнення (dzA) менше 2 мм, зокрема менше 0,5 мм.
Текст
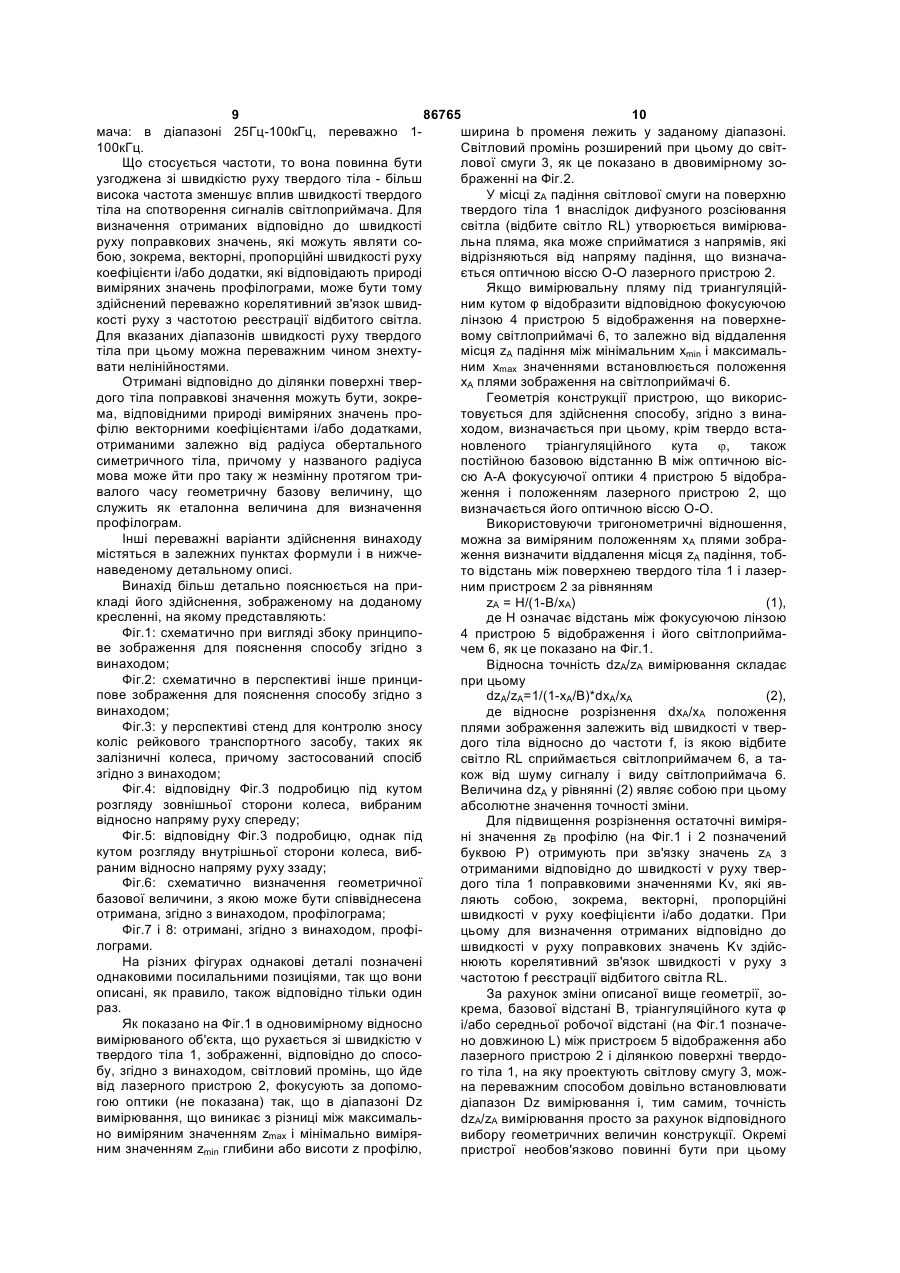
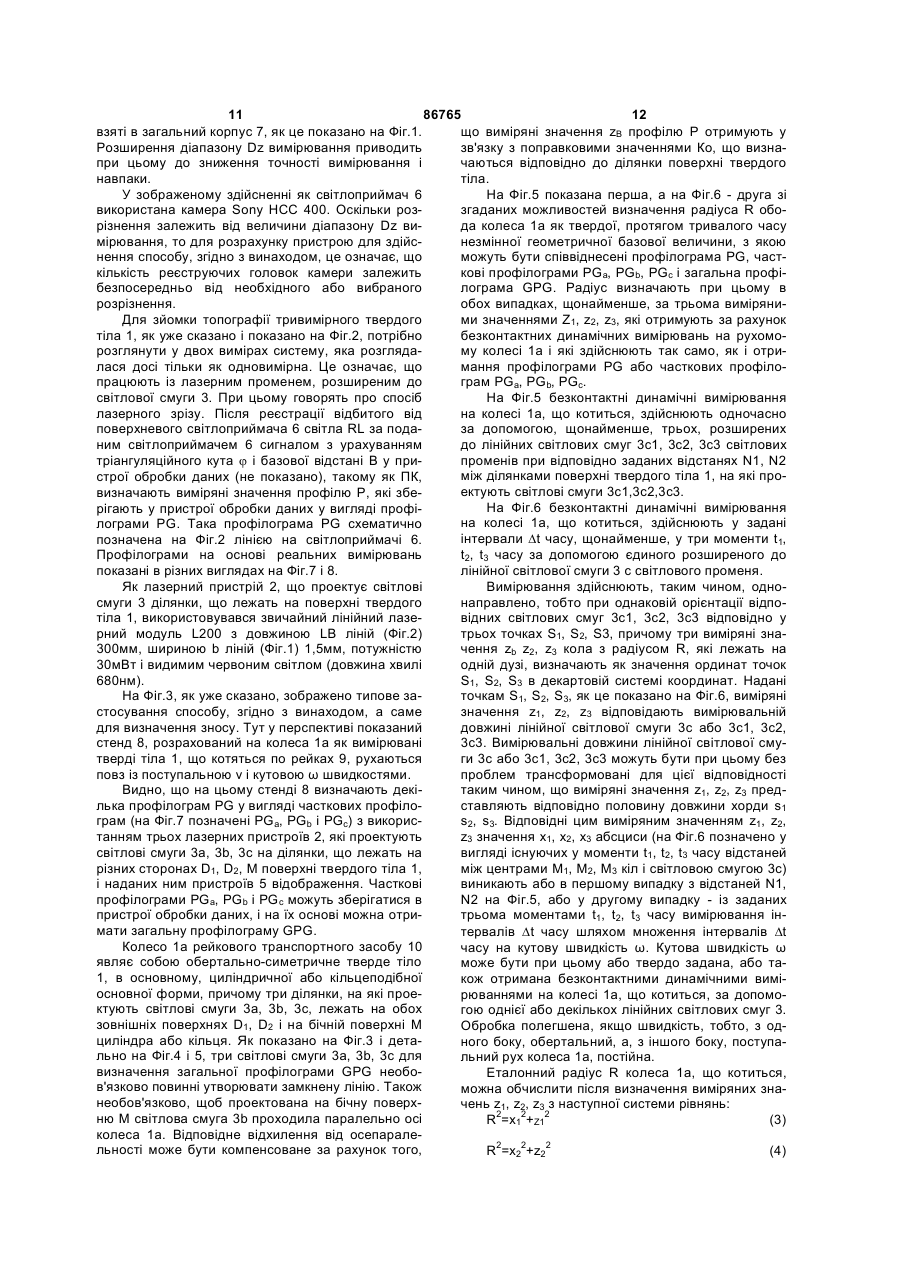
1. Спосіб безконтактного динамічного визначення профілю (Р) твердого тіла (1, 1а), зокрема визначення зносу, що виник на твердому тілі (1, 1а), при цьому тверде тіло (1, 1а) являє собою обертально-симетричне колесо (1а) транспортного засобу, в основному, циліндричної або кільцеподібної основної форми, в якому щонайменше один створений лазерним пристроєм (2) світловий промінь, розширений до лінійної світлової смуги (3, 3а, 3b, 3с, 3c1, 3с2, 3с3), проектують на щонайменше одну ділянку поверхні твердого тіла (1, 1а), яке переміщають по рейках (9) повз лазерний пристрій (2), і відбите від поверхні твердого тіла (1, 1а) світло (RL) фокусують в доданому лазерному пристрою (2) пристрої (5) відображення, оптична вісь (А-А) якого розташована під постійним тріангуляційним кутом (φ) до напрямку (О-О) проекції лазерного пристрою (2) і на постійній базовій відстані (В) від лазерного пристрою (2), і з високою, у порівнянні зі швидкістю (v) руху твердого тіла (1, 1а) частотою (f), реєструють за допомогою поверхневого світлоприймача (6), після чого по сигналах, що подаються світлоприймачем (6), з врахуванням тріангуляційного кута (φ) і базової відстані (В) за допомогою тригонометричних співвідношень і поправкових значень (Kv), які визначають відповідно до швидкості (v) руху твердого тіла (1, 1а), в пристрої обробки даних отримують виміряні зна 2 (19) 1 3 86765 4 ω) руху і частотою (f) реєстрації відбитого світла 10. Спосіб за будь-яким з пп. 1-9, який відрізня(RL). ється тим, що профілограму (PG), часткові профі5. Спосіб за п. 1, який відрізняється тим, що лограми (PGa, PGb, PGc), загальну профілограму профілограми (PG) визначають як часткові профі(GPG), відповідну еталонну профілограму (ВР1, лограми (PGa, РGb, PGc) з використанням щонайВР2) і/або відповідні відхилення (∆PG) візуалізуменше трьох лазерних пристроїв (2), що проектують в індикаторному пристрої, наприклад на диспють світлові смуги (3, 3а, 3b, 3с, 3c1, 3с2, 3с3) на леї. ділянки, які лежать на різних боках поверхні твер11. Спосіб за будь-яким з пп. 1-10, який відрізнядого тіла (1, 1а), і доданих їм пристроїв (5) відоється тим, що як світлоприймач (6) використовубраження, часткові профілограми (PGa, PGb, PGc) ють пристрій, що подає оцифровані сигнали, такий зберігають в пристрої обробки даних і отримують як ПЗС-камера з тригерним керуванням. на основі цього загальну профілограму (GPG). 12. Спосіб за будь-яким з пп. 1-11, який відрізня6. Спосіб за будь-яким з пп. 1-5, який відрізняєтьється тим, що як світлоприймач (6) використовуся тим, що профілограму (PG), часткові профілоють позиційно-чутливий детектор (позиційнограми (PGa, PGb, PGc) і/або загальну профілограму чутливий пристрій), такий як фотодіодна матриця. (GPG) порівнюють з відповідно однією або декіль13. Спосіб за будь-яким з пп. 1-12, який відрізнякома еталонними профілограмами (ВР1, ВР2) і ється тим, що світлова смуга (3, 3а, 3b, 3с, 3c1, реєструють відповідні відхилення (∆PG) від даної 3с2, 3с3) має ширину (b) в діапазоні 0,3-6,5 мм, еталонної профілограми (ВР1,ВР2). зокрема 0,8-2,2 мм. 7. Спосіб за будь-яким з пп. 1-6, який відрізняєть14. Спосіб за будь-яким з пп. 1-13, який відрізняся тим, що профілограму (PG), часткові профілоється тим, що світлова смуга (3, 3а, 3b, 3с, 3c1, грами (PGa, PGb, PGc), загальну профілограму 3с2, 3с3) має довжину (LB) в діапазоні 50-750 мм, (GPG), відповідну еталонну профілограму (ВР1, зокрема 200-400 мм. ВР2) і/або відповідні відхилення (∆РС) співвідно15. Спосіб за будь-яким з пп. 1-14, який відрізнясять зі сталою, протягом тривалого часу незмінється тим, що тріангуляційний кут (φ) має значенною геометричною базовою величиною, такою як ня в діапазоні 15-40°, зокрема 20-30°. внутрішній діаметр (2*R) обода колеса, який не 16. Спосіб за будь-яким з пп. 1-15, який відрізнязношується. ється тим, що частота (f), з якою за допомогою 8. Спосіб за п. 7, який відрізняється тим, що басвітлоприймача (6) реєструють відбите від поверзову величину отримують щонайменше з трьох хні твердого тіла (1, 1а) світло (RL), лежить в діавиміряних значень, які також отримують за допопазоні 25 Гц-100 кГц, переважно 1-10 кГц. могою безконтактних динамічних вимірювань на 17. Спосіб за будь-яким з пп. 1-16, який відрізнярухомому твердому тілі (1, 1а), здійснюваних так ється тим, що швидкість (v) поступального руху само, як і визначення профілограми (PG) або частвердого тіла складає менше 3,5 м/с, переважно ткових профілограм (PGa, PGb, PGc). менше 1,5 м/с. 9. Спосіб за п. 7 або 8, який відрізняється тим, 18. Спосіб за будь-яким з пп. 1-17, який відрізнящо базовою величиною є радіус (R) обертальноється тим, що середня робоча відстань (L) між симетричного тіла, що котиться, який визначають з лазерним пристроєм (2) і/або пристроєм (5) відонаступної системи рівнянь: браження і ділянкою поверхні твердого тіла (1, 1а), R2=x12+z12 (1) на яку проектують світлову смугу (3, 3а, 3b, 3с, R2=x22+z22 (2) 3c1, 3с2, 3с3), лежить в діапазоні 20-650 мм, зокR2=x32+z32 (3) рема 150-350 мм. х1-х2=k*(х2-х3) (4), 19. Спосіб за будь-яким з пп. 1-18, який відрізняде z1 z2, z3 є трьома відповідними ординаті (z) деється тим, що базова відстань (В) між пристроєм картової системи координат виміряними значен(5) відображення, зокрема центром фокусуючої нями довжини лінійної світлової смуги (3, 3а, 3b, лінзи (4) пристрою (5) відображення, і оптичною 3с, 3c1, 3с2, 3с3), які лежать на одній дузі кола з віссю (О-О) лазерного пристрою лежить в діапазорадіусом (R), які отримані за допомогою однонапні 30-450 мм, зокрема 60-270 мм. равлених світлових смуг (3, 3а, 3b, 3с, 3c1, 3с2, 20. Спосіб за будь-яким з пп. 1-19, який відрізня3с3), які відповідають половині довжини хорди (sl1, ється тим, що профілограма (PG), часткові профіsl2, sl3) дуги кола, де x1, х2, х3 - значення (х) абцилограми (PGa, PGb, PGc), загальна профілограма си, що відповідають цим виміряним значенням, a k (GPG), відповідна еталонна профілограма (ВР1, - коефіцієнт, що відповідає заданим інтервалам ВР2) і/або відповідні відхилення (∆РС) мають роз(∆t) часу або відстаням (N1, N2) між ділянками різнення (dzA) менше 2 мм, зокрема менше 0,5 мм. поверхні твердого тіла (1, 1а). Винахід стосується способу безконтактного динамічного визначення профілю твердого тіла, зокрема, з метою визначення виниклого на твердому тілі зносу. Для визначення зносу нерідко використовують так звані модельні випробувальні стенди (Amsler, Laffon-Eichinger та інш.), на яких випробовують зразки матеріалів в утворюваній у певному випад ку застосування парі тертя, відносно до її трибологічних властивостей. Перенесення отриманих у такий спосіб параметрів на конкретний випадок застосування5 наприклад, на тіла тертя набагато більшого розміру, ніж зразки, наражається, однак, на труднощі, які полягають у тому, що випробування можуть давати лише орієнтовні значення, оскільки величини, що впливають на знос, явля 5 86765 6 ють собою комплексну структуру умов, яка на мографії постулюється принципова придатність сподельному випробувальному стенді ніколи точно не собу світлового зрізу для застосування біля безвідповідає реальним умовам. Тому трибологічні перервно рухомих об'єктів, проте щодо дослідження на реальному об'єкті для важливих можливостей застосування і меж відомостей не випадків застосування є неминучими, однак часто міститься. Спосіб динамічного, тобто в реальному наштовхуються на ту проблему, що деталь, знос часі, визначення профілю рухомого твердого тіла якої повинен бути досліджений, після закінчення стикається, однак, на практиці з тією проблемою, певного періоду експлуатації доводиться демонтущо через переміщення вимірюваної поверхні вивати, а потім досліджувати, наприклад, стосовно никають спотворення, які унеможливлюють застовиниклого зносу з визначенням поверхневого сування класичного тріангуляційного способу, профілю, що, як правило, пов'язано зі значними оскільки таким чином не можна отримати відповідвитратами. них реальності даних вимірювань. Визначення профілів твердих тіл, тобто склаВ основі даного винаходу лежить завдання дання профілограм поверхні, може здійснюватися, створення способу безконтактного динамічного як відомо, тактильними способами, наприклад із визначення профілю твердого тіла описаного вивикористанням контактного профілометра, причоще роду, який забезпечував би нетривалий час му щодо останнього мова йде про побудований на вимірювання, охоплював би такий діапазон виміторканні твердого тіла наконечником спосіб, при рювання, що перекривав би, щонайменше, три якому діапазон вимірювання складає менше однопорядки величин, такі як десяті міліметра, міліметго міліметра і при якому, наприклад, у сантиметри і сантиметри, забезпечував би високу точність ровому діапазоні не можна отримати даних вимівимірювання і міг би застосовуватися у тяжких рювань. Час вимірювання складає при цьому умовах експлуатації, зокрема для визначення знодекілька секунд на кожну вимірювану точку, і спосу деталей. сіб не придатний для шорсткого вимірювального Згідно з винаходом, це досягається за допомооточення. гою способу, при якому, щонайменше, один ствоДля статичного визначення профілів твердих рений лазерним пристроєм, розширений, щонайтіл відомі також різні безконтактні оптичні способи. менше, до однієї лінійної світлової смуги світловий Подібні способи і відповідні пристрої, як це описапромінь проектують, щонайменше, на одну ділянку но, наприклад, у монографії Bernd Breuckmann поверхні твердого тіла, причому тверде тіло пере«Bildverarbeitung und optische Messtechnik», міщують повз лазерний пристрій, відбите від діляMunchen: Franzis', 1993, Kapitel 6, об'єднані також нки поверхні твердого тіла світло фокусують у під терміном «телеметрична 3D-вимірювальна пристрої відображення, оптична вісь якого розтатехніка». Як один із топометричних способів опишована під постійним тріангуляційним кутом до сана при цьому лазерна тріангуляція, причому під напряму проекції лазерного пристрою і на постійтерміном «тріангуляція» потрібно розуміти розроній базовій відстані від лазерного пристрою, і з блений уперше Снелліусом у 1615р. для геодезивисокою порівняно зі швидкістю руху твердого тіла чних цілей спосіб вимірювання, при якому вимірючастотою реєструють за допомогою поверхневого вану величину визначають непрямо, за іншими світлоприймача, після чого за сигналами, що повимірюваними величинами з використанням тридаються світлоприймачем, залежно від тріангулягонометричних відношень. ційного кута і базової відстані за допомогою тригоПри лазерній тріангуляції за допомогою лазенометричних відношень й у зв'язку з ра на вимірюваний об'єкт проектують світлову визначуваними відповідно до швидкості руху тверпляму. Відбите від об'єкта світло, зокрема, розсіядого тіла поправковими значеннями у пристрої не світло, відображають на світлоприймачі, такому обробки даних отримують виміряні значення прояк позиційно-чутливий детектор. Подібні детектори філю, які зберігають у пристрої обробки даних у називаються по-англійському PSD - «position вигляді профілограми. sensitive devices» - позиційно-чутливі пристрої. За Тверде тіло може являти собою при цьому геометрією оптичної конструкції, а також кутом між обертальне симетричне тіло, що здійснює постунапрямами освітлення і розгляду за допомогою пальний, обертальний рух або переважно рух котріангуляції визначають положення, зокрема височення, зокрема колесо транспортного засобу. Спотне положення, точки об'єкта, що розглядається. сіб, згідно з винаходом, являє собою, тим самим, Методи лазерної тріангуляції дозволяють сьогодні можливість визначити профілі колеса під час руху і провести безконтактні вимірювання на відстані до зробити з цього висновки про знос. кількох метрів із розрізненням по глибині аж до Додатково до зв'язку з визначуваними згідно зі мкм-діапазону. швидкістю руху твердого тіла поправковими знаМодифікацією лазерної тріангуляції є відомий, ченнями, які переважно забезпечують не «змазатакож описаний у названій монографії спосіб, при не» швидкістю визначення профілю, можна, зокякому лазерний світловий промінь розширюють до рема, в названому як переважний випадку для лінійної світлової смуги, так званого світлового вільного від спотворень визначення профілограми зрізу. Для реєстрації відбитого світла можна викоотримати також дані вимірювань профілю у зв'язку ристовувати при цьому поверхневий детектор, з визначуваними відповідно до ділянки поверхні наприклад відеокамеру. Обробка відбувається твердого тіла поправковими значеннями. також на основі тріангуляції. Характерним для цьоУ розумінні повного визначення профілю пего способу є діапазон вимірювання висоти профіреважно, якщо декілька профілограм визначають лю від 1мм до 1м при розрізненні приблизно від 1 як часткові профілограми з використанням, щодо 50 тисячних цього діапазону. У названій мононайменше, трьох лазерних пристроїв, які проекту 7 86765 8 ють світлові смуги на ділянки, що лежать по різні Що стосується використовуваного лазерного боки від поверхні твердого тіла, і наданих їм припристрою, згідно з винаходом, то особливо перестроїв відображення, часткові профілограми зберіважними виявилися наступні характеристики: гають у пристрої обробки даних і отримують на - з точки зору високої відтворюваності резульоснові цього загальну профілограму. У твердого татів і високої точності вимірювань: довжина хвилі тіла, в основному, циліндричної або кільцеподібної створеної світлової смуги в діапазоні 400-1000нм, основної форми, такого як колесо транспортного зокрема, 650-700нм; засобу, щонайменше, три ділянки, на які проекту- також із цієї точки зору: потужність лазерного ють світлові смуги, можуть лежати при цьому пепристрою в діапазоні 0,5-50мВт; реважно на обох зовнішніх поверхнях або на бічній - з точки зору високої надійності роботи (клас поверхні циліндра або кільця. Профілограму, частлазера 2 по DIN EN 60825-1:2001-11): довжина кові профілограми і/або загальну профілограму хвилі світлової смуги у видимій ділянці і граничне можна потім порівнювати з відповідно однією або значення доступного випромінювання (GZS) лазедекількома еталонними профілограмами і реєстрного пристрою менше за 1мВт, причому потрібно рувати відповідні відхилення від даної еталонної врахувати, що при потужності лазера більше за профілограми, яка є мірилом виникаючого зносу 1мВт за рахунок відповідних заходів граничне знаабо мірилом того, чи перебуває ще виникаючий чення доступного випромінювання може бути знизнос у допустимому діапазоні. За допомогою корежене до необхідного значення; лятивних зв'язків між виникаючою тривалістю на- з точки зору мінімізації витрат на спосіб (вивантаження твердого тіла і зареєстрованим знотрати): використання cw -твердотільного діода сом можна у зв'язку з цим зробити також (діода з незгасаючою хвилею), що складається, екстраполюючий висновок про те, як довго, не наприклад, із напівпровідникового матеріалу, таковикликаючи побоювань, може ще тривати наванго як GaAs, AlGaAs, InGaP, GaAsSb, ІnР, PbSnTe і таження або коли виявиться необхідною повторна т.п., переважно VLD (діод із видимим лазером), перевірка. який аналогічно використовується в лазерному Крім того, переважно, якщо профілограму, чамаркері, - видима світлова смуга полегшує до того сткові профілограми, загальну профілограму, відж юстирування лазерного пристрою відносно виповідну еталонну профілограму і/або відповідні мірюваного твердого тіла. відхилення співвідносять із постійною, протягом Що стосується умов вимірювання способом тривалого часу незмінною геометричною базовою відповідно до винаходу, то особливо переважними величиною, такою як внутрішня периферія обода або оптимальними для профілометрії з метою колеса, що не піддається зносу. Таким чином, поконтролю зносу виявилися наступні характеристиверхню зносу можна зобразити, наприклад, у вики, причому для відповідно отриманої профілогляді розгортки, на якій висотний профіль порівняграми, часткових профілограм і загальної профілоно з базовою величиною відображають грами може бути досягнуте розрізнення менше за відповідними образотворчими засобами. Напри2мм, зокрема, менше за 0,5мм: клад, профілограму, часткові профілограми, зага- ширина світлової смуги: в діапазоні 0,3льну профілограму, відповідну еталонну профіло6,5мм, зокрема 0,8-2,2мм, за рахунок розходження граму і/або відповідні відхилення можна при збільшенні, за необхідності, бажаної середньої візуалізувати в індикаторному пристрої, наприклад робочої відстані (вимірювальної відстані) відбувана дисплеї. ється збільшення ширини світлової смуги, що, одБазову величину можна отримати при цьому нак, знижує точність вимірювань; переважно, щонайменше, із трьох виміряних зна- довжина світлової смуги: в діапазоні 50чень, отримуваних також за допомогою безконтак750мм, зокрема 200-400мм, відповідно до геометтних динамічних вимірювань на рухомому твердорії ділянки поверхні вимірюваного твердого тіла; му тілі, здійснюваних так само, як і визначення - тріангуляційний кут: у діапазоні 15-40°, зокпрофілограми або часткових профілограм. Для рема, 20-30°, збільшення кута підвищує точність цього існує можливість проведення вимірювань на вимірювань, однак зростає також небезпека неодрухомому твердому тілі в задані інтервали часу, норідного освітлення поверхні твердого тіла і вищонайменше, у три моменти часу за допомогою никнення затінення; єдиного розширеного до лінійної світлової смуги - базова відстань між пристроєм відображенсвітлового променя або проведення вимірювань ня, зокрема, центром фокусуючої лінзи пристрою одночасно за допомогою, щонайменше, трьох відображення, і оптичною віссю лазерного прирозширених до лінійних світлових смуг світлових строю в діапазоні 30-450мм, зокрема, 60-270мм; променів при заданій відстані між ділянками пове- середня робоча відстань між лазерним прирхні твердого тіла, на які проектують світлові смустроєм і/або пристроєм відображення і ділянкою ги. поверхні твердого тіла, на яку проектують світлову Як світлоприймачі можуть використовуватися смугу: в діапазоні 20-650мм, зокрема, 150-350мм; переважно пристрої, що подають цифровані сиг- швидкість, за необхідності, поступального нали, такі як ПЗС-камери з тригерним керуванням, руху твердого тіла: менша за 3,5м/с, переважно або позиційно-чутливі детектори (position sensitive менша за 1,5м/с; devices), такі як фотодіодні матриці. У першому - кутова швидкість, за необхідності, обертальвипадку потрібно врахувати, що світлоприймач ного руху твердого тіла: менша за 15с-1, переважчутливий до інтенсивності світла, тоді як у другому но менша за 6с-1 і переважно постійна; випадку він подає еквівалентні кількості світла - частота, з якою відбите від поверхні твердого сигнали. тіла світло реєструють за допомогою світлоприй 9 86765 10 мача: в діапазоні 25Гц-100кГц, переважно 1ширина b променя лежить у заданому діапазоні. 100кГц. Світловий промінь розширений при цьому до світЩо стосується частоти, то вона повинна бути лової смуги 3, як це показано в двовимірному зоузгоджена зі швидкістю руху твердого тіла - більш браженні на Фіг.2. висока частота зменшує вплив швидкості твердого У місці zA падіння світлової смуги на поверхню тіла на спотворення сигналів світлоприймача. Для твердого тіла 1 внаслідок дифузного розсіювання визначення отриманих відповідно до швидкості світла (відбите світло RL) утворюється вимірюваруху поправкових значень, які можуть являти сольна пляма, яка може сприйматися з напрямів, які бою, зокрема, векторні, пропорційні швидкості руху відрізняються від напряму падіння, що визначакоефіцієнти і/або додатки, які відповідають природі ється оптичною віссю O-O лазерного пристрою 2. виміряних значень профілограми, може бути тому Якщо вимірювальну пляму під триангуляційздійснений переважно корелятивний зв'язок швидним кутом φ відобразити відповідною фокусуючою кості руху з частотою реєстрації відбитого світла. лінзою 4 пристрою 5 відображення на поверхнеДля вказаних діапазонів швидкості руху твердого вому світлоприймачі 6, то залежно від віддалення тіла при цьому можна переважним чином знехтумісця zΑ падіння між мінімальним xmin і максимальвати нелінійностями. ним хmах значеннями встановлюється положення Отримані відповідно до ділянки поверхні тверхА плями зображення на світлоприймачі 6. дого тіла поправкові значення можуть бути, зокреГеометрія конструкції пристрою, що викорисма, відповідними природі виміряних значень протовується для здійснення способу, згідно з винафілю векторними коефіцієнтами і/або додатками, ходом, визначається при цьому, крім твердо встаотриманими залежно від радіуса обертального новленого тріангуляційного кута j, також симетричного тіла, причому у названого радіуса постійною базовою відстанню В між оптичною вісмова може йти про таку ж незмінну протягом трисю А-А фокусуючої оптики 4 пристрою 5 відобравалого часу геометричну базову величину, що ження і положенням лазерного пристрою 2, що служить як еталонна величина для визначення визначається його оптичною віссю O-O. профілограм. Використовуючи тригонометричні відношення, Інші переважні варіанти здійснення винаходу можна за виміряним положенням хА плями зобрамістяться в залежних пунктах формули і в нижчеження визначити віддалення місця zΑ падіння, тобнаведеному детальному описі. то відстань між поверхнею твердого тіла 1 і лазерВинахід більш детально пояснюється на приним пристроєм 2 за рівнянням кладі його здійснення, зображеному на доданому zA = H/(1-B/xA) (1), кресленні, на якому представляють: де Η означає відстань між фокусуючою лінзою Фіг.1: схематично при вигляді збоку принципо4 пристрою 5 відображення і його світлоприймаве зображення для пояснення способу згідно з чем 6, як це показано на Фіг.1. винаходом; Відносна точність dzA/zA вимірювання складає Фіг.2: схематично в перспективі інше принципри цьому пове зображення для пояснення способу згідно з dzA/zA=1/(1-xA/B)*dxA/xA (2), винаходом; де відносне розрізнення dxA/xA положення Фіг.3: у перспективі стенд для контролю зносу плями зображення залежить від швидкості ν тверколіс рейкового транспортного засобу, таких як дого тіла відносно до частоти f, із якою відбите залізничні колеса, причому застосований спосіб світло RL сприймається світлоприймачем 6, а тазгідно з винаходом; кож від шуму сигналу і виду світлоприймача 6. Фіг.4: відповідну Фіг.3 подробицю під кутом Величина dzA у рівнянні (2) являє собою при цьому розгляду зовнішньої сторони колеса, вибраним абсолютне значення точності зміни. відносно напряму руху спереду; Для підвищення розрізнення остаточні виміряФіг.5: відповідну Фіг.3 подробицю, однак під ні значення zB профілю (на Фіг.1 і 2 позначений кутом розгляду внутрішньої сторони колеса, виббуквою Р) отримують при зв'язку значень zA з раним відносно напряму руху ззаду; отриманими відповідно до швидкості ν руху тверФіг.6: схематично визначення геометричної дого тіла 1 поправковими значеннями Kv, які явбазової величини, з якою може бути співвіднесена ляють собою, зокрема, векторні, пропорційні отримана, згідно з винаходом, профілограма; швидкості ν руху коефіцієнти і/або додатки. При Фіг.7 і 8: отримані, згідно з винаходом, профіцьому для визначення отриманих відповідно до лограми. швидкості ν руху поправкових значень Kv здійсНа різних фігурах однакові деталі позначені нюють корелятивний зв'язок швидкості ν руху з однаковими посилальними позиціями, так що вони частотою f реєстрації відбитого світла RL. описані, як правило, також відповідно тільки один За рахунок зміни описаної вище геометрії, зораз. крема, базової відстані В, тріангуляційного кута φ Як показано на Фіг.1 в одновимірному відносно і/або середньої робочої відстані (на Фіг.1 позначевимірюваного об'єкта, що рухається зі швидкістю ν но довжиною L) між пристроєм 5 відображення або твердого тіла 1, зображенні, відповідно до спосолазерного пристрою 2 і ділянкою поверхні твердобу, згідно з винаходом, світловий промінь, що йде го тіла 1, на яку проектують світлову смугу 3, можвід лазерного пристрою 2, фокусують за допомона переважним способом довільно встановлювати гою оптики (не показана) так, що в діапазоні Dz діапазон Dz вимірювання і, тим самим, точність вимірювання, що виникає з різниці між максимальdzA/zA вимірювання просто за рахунок відповідного но виміряним значенням zmax і мінімально вимірявибору геометричних величин конструкції. Окремі ним значенням zmin глибини або висоти z профілю, пристрої необов'язково повинні бути при цьому 11 86765 12 взяті в загальний корпус 7, як це показано на Фіг.1. що виміряні значення zΒ профілю Ρ отримують у Розширення діапазону Dz вимірювання приводить зв'язку з поправковими значеннями Ко, що визнапри цьому до зниження точності вимірювання і чаються відповідно до ділянки поверхні твердого навпаки. тіла. У зображеному здійсненні як світлоприймач 6 На Фіг.5 показана перша, а на Фіг.6 - друга зі використана камера Sony HCC 400. Оскільки роззгаданих можливостей визначення радіуса R оборізнення залежить від величини діапазону Dz вида колеса 1а як твердої, протягом тривалого часу мірювання, то для розрахунку пристрою для здійснезмінної геометричної базової величини, з якою нення способу, згідно з винаходом, це означає, що можуть бути співвіднесені профілограма PG, часткількість реєструючих головок камери залежить кові профілограми PGa, PGb, PGc і загальна профібезпосередньо від необхідного або вибраного лограма GPG. Радіус визначають при цьому в розрізнення. обох випадках, щонайменше, за трьома виміряниДля зйомки топографії тривимірного твердого ми значеннями Z1, z2, z3, які отримують за рахунок тіла 1, як уже сказано і показано на Фіг.2, потрібно безконтактних динамічних вимірювань на рухоморозглянути у двох вимірах систему, яка розглядаму колесі 1а і які здійснюють так само, як і отрилася досі тільки як одновимірна. Це означає, що мання профілограми PG або часткових профілопрацюють із лазерним променем, розширеним до грам PGa, PGb, PGc. світлової смуги 3. При цьому говорять про спосіб На Фіг.5 безконтактні динамічні вимірювання лазерного зрізу. Після реєстрації відбитого від на колесі 1а, що котиться, здійснюють одночасно поверхневого світлоприймача 6 світла RL за подаза допомогою, щонайменше, трьох, розширених ним світлоприймачем 6 сигналом з урахуванням до лінійних світлових смуг 3c1, 3с2, 3с3 світлових променів при відповідно заданих відстанях N1, N2 тріангуляційного кута j і базової відстані В у приміж ділянками поверхні твердого тіла 1, на які прострої обробки даних (не показано), такому як ПК, ектують світлові смуги 3с1,3с2,3с3. визначають виміряні значення профілю Р, які збеНа Фіг.6 безконтактні динамічні вимірювання рігають у пристрої обробки даних у вигляді профіна колесі 1а, що котиться, здійснюють у задані лограми PG. Така профілограма PG схематично інтервали Dt часу, щонайменше, у три моменти t1, позначена на Фіг.2 лінією на світлоприймачі 6. Профілограми на основі реальних вимірювань t2, t3 часу за допомогою єдиного розширеного до показані в різних виглядах на Фіг.7 і 8. лінійної світлової смуги 3 с світлового променя. Як лазерний пристрій 2, що проектує світлові Вимірювання здійснюють, таким чином, односмуги 3 ділянки, що лежать на поверхні твердого направлено, тобто при однаковій орієнтації відпотіла 1, використовувався звичайний лінійний лазевідних світлових смуг 3c1, 3с2, 3с3 відповідно у рний модуль L200 з довжиною LB ліній (Фіг.2) трьох точках S1, S2, S3, причому три виміряні зна300мм, шириною b ліній (Фіг.1) 1,5мм, потужністю чення zb z2, z3 кола з радіусом R, які лежать на 30мВт і видимим червоним світлом (довжина хвилі одній дузі, визначають як значення ординат точок 680нм). S1, S2, S3 в декартовій системі координат. Надані На Фіг.3, як уже сказано, зображено типове заточкам S1, S2, S3, як це показано на Фіг.6, виміряні стосування способу, згідно з винаходом, а саме значення z1, z2, z3 відповідають вимірювальній для визначення зносу. Тут у перспективі показаний довжині лінійної світлової смуги 3с або 3c1, 3с2, стенд 8, розрахований на колеса 1а як вимірювані 3с3. Вимірювальні довжини лінійної світлової смутверді тіла 1, що котяться по рейках 9, рухаються ги 3с або 3c1, 3с2, 3с3 можуть бути при цьому без повз із поступальною ν і кутовою ω швидкостями. проблем трансформовані для цієї відповідності Видно, що на цьому стенді 8 визначають декітаким чином, що виміряні значення z1, z2, z3 предлька профілограм PG у вигляді часткових профілоставляють відповідно половину довжини хорди s1 грам (на Фіг.7 позначені PGa, PGb і PGc) з викорисs2, s3. Відповідні цим виміряним значенням z1, z2, танням трьох лазерних пристроїв 2, які проектують z3 значення х1, х2, х3 абсциси (на Фіг.6 позначено у світлові смуги 3а, 3b, 3с на ділянки, що лежать на вигляді існуючих у моменти t1, t2, t3 часу відстаней різних сторонах D1, D2, Μ поверхні твердого тіла 1, між центрами М1, М2, М3 кіл і світловою смугою 3с) і наданих ним пристроїв 5 відображення. Часткові виникають або в першому випадку з відстаней N1, профілограми PGa, PGb і PGc можуть зберігатися в N2 на Фіг.5, або у другому випадку - із заданих пристрої обробки даних, і на їх основі можна отритрьома моментами t1, t2, t3 часу вимірювання інмати загальну профілограму GPG. тервалів Dt часу шляхом множення інтервалів Dt Колесо 1а рейкового транспортного засобу 10 часу на кутову швидкість ω. Кутова швидкість ω являє собою обертально-симетричне тверде тіло може бути при цьому або твердо задана, або та1, в основному, циліндричної або кільцеподібної кож отримана безконтактними динамічними виміосновної форми, причому три ділянки, на які проерюваннями на колесі 1а, що котиться, за допомоктують світлові смуги 3а, 3b, 3с, лежать на обох гою однієї або декількох лінійних світлових смуг 3. зовнішніх поверхнях D1, D2 і на бічній поверхні Μ Обробка полегшена, якщо швидкість, тобто, з одциліндра або кільця. Як показано на Фіг.3 і детаного боку, обертальний, а, з іншого боку, поступально на Фіг.4 і 5, три світлові смуги 3а, 3b, 3с для льний рух колеса 1а, постійна. визначення загальної профілограми GPG необоЕталонний радіус R колеса 1а, що котиться, в'язково повинні утворювати замкнену лінію. Також можна обчислити після визначення виміряних знанеобов'язково, щоб проектована на бічну поверхчень z1, z2, z3 з наступної системи рівнянь: ню Μ світлова смуга 3b проходила паралельно осі R2=x12+Z12 (3) колеса 1а. Відповідне відхилення від осепаралельності може бути компенсоване за рахунок того, R2=x22+z22 (4) 86765 14 випадку подібні відхилення виникають на позначеній штрихпунктиром ділянці. В еталонних профілоx1-x2=k* (х2-х3) (6) грамах ВР1, ВР2 мова може йти перевалено про Величини R, х1, х2 і х3 означають невідоме. допустимі задані розміри, еталонна профілограма Величина k у рівнянні (6) є відомим, відповідним ВР1, ВР2 може бути також запам'ятовуваним набором даних виміряних значень zB з попередньої заданим інтервалам Dt часу або відстаням N1, N2 зміни, так що відповідні відхилення APG дають між ділянками поверхні колеса 1а коефіцієнтом, інформацію про те, наскільки великий знос, що який у переважному випадку постійних інтервалів виник із моменту попереднього вимірювання. Dt часу або еквідистантних відстаней N1, N2 набуУ той час як зображення профілю Ρ на Фіг.7 ває значення 1. лише двовимірне, де виміряні значення zВ профіОтриманий радіус R може служити, з одного лю Ρ показані у вигляді лінії - вектори x, z - по пебоку, основною лінією для виміряних значень zΒ ретину Q колеса 1а, профіль Ρ на Фіг.8 ілюструє висоти профілю, що визначаються на бічній поветривимірний характер способу, згідно з винаходом. рхні Μ колеса 1а, а, з іншого боку, можна залучити На Фіг.8 над отриманою за допомогою згаданого цей радіус R для визначення поправкових значень радіуса R розгорткою зовнішньої поверхні D1 колеКо, що беруться до уваги відповідно до освітлених са 1а різними відтінками сірого зображені виміряні світловою смугою 3с або 3а, 3b, 3с, 3c1, 3с2, 3с3 значення ΖB профілю Ρ у вигляді векторів х, у, z. ділянкою поверхні твердого тіла 1. Необхідність Абсолютне значення точності dzA вимірювання узяти до уваги подібні поправкові значення Ко вивідповідно до рівняння (2) складає біля 0,5мм. Поникає, наприклад, тому, що хорди s1, s2, s3 утвозначена буквою Q, зображена контурна лінія ознарюють відповідно різні центральні кути, внаслідок чає при цьому показаний на Фіг.7 переріз Q колеса чого виникають різні локальні спотворення профі1а, причому тут, як зазначено, є частковий пролю. Центральні кути лежать при цьому між 0° у філь PGa на Фіг.7. Замість відтінків сірого можна першому екстремальному випадку, коли світлова для посилення наочності використовувати на відсмуга 3 с утворює дотичну до периферії розглядуповідному дисплеї також різні кольори. ваної дуги окружності колеса 1а, і 180° в іншому Спосіб, згідно з винаходом, забезпечує переекстремальному випадку, коли світлова смуга 3 с важним чином визначення профілю Ρ у надзвизбігається з діаметром 2R розглядуваної дуги чайно короткий час. Так, протягом 5 секунд за доокружності колеса 1а. Найбільша довжина хорди помогою розташованих з обох боків рейок 9, по s13 містить більшість інформації про визначуваний яких повз котиться рейковий транспортний засіб профіль і має найменше локальне спотворення. 10, лазерних пристроїв 2 і пристроїв 5 відобраЗ цих причин надзвичайно переважно, якщо ження для п'яти возиків, тобто десяти колісних зображену на Фіг.7 загальну профілограму GPG пар, отже, 20 коліс 1а можна скласти відповідну твердого тіла 1, що котиться, у цьому випадку котривимірну загальну профілограму GPG. леса 1а, отримують із трьох часткових профілоДаний винахід не обмежується зображеним грам, що визначаються на обох зовнішніх поверхприкладом його здійснення, а включає в себе всі нях D1, D2 і на бічній поверхні Μ одночасно в один подібно діючі в значенні винаходу засоби і заходи. момент tk часу, причому момент tk часу визначення Так, інша можливість полягає в застосуванні так окремих часткових профілограм вибирають таким званих смугових проекційних способів із викорисчином, що отримане в цей момент tk часу виміряне танням структурованого або кодованого освітлензначення zk - у цьому випадку z3 - щонайменше, із ня. Ці способи засновані також на принципі тріантрьох виміряних значень z1, z2, z3, що лежать на гуляції, причому все тверде тіло 1 освітлюють одній дузі кола з радіусом R на одній із зовнішніх відповідним лазерному пристрою 2 проектором із поверхонь D1, D2, і що визначаються відповідно в заданим розрахунковим шляхом світловим узопослідовні моменти t1, t2, t3 часу і однонаправлено ром. Під час зйомки світловий узор змінюють певпо відповідній довжині LB лінійної світлової смуги ним чином з можливістю визначення топографії за 3с, 3c1, 3с2, 3c3 і відповідних половині довжини результуючим розподілом інтенсивності знятого хорди s1, s2, s3 через дугу кола, набуває максимум. зображення. Само собою, використання цього критерію вибору Крім того, фахівець може доповнити винахід моменту tk часу не обмежується трьома вимірянидодатковими переважними заходами. Так, для ми значеннями z1, z2, z3. Поклавши за основу бівиконання всіх обчислювальних операцій, наприльше трьох виміряних значень z1, z2, z3, можна клад приведених рівнянь (1)-(6), у пристрої обробдосягнути навіть ще кращих результатів, якщо ки даних можуть використовуватися відповідні отримана максимальна половина довжини хорди програмні модулі. sl3 менше відрізняється від радіуса R або приймає Далі винахід не обмежується охарактеризовате ж значення, що й радіус R. ною в п.1 формули винаходу сукупністю ознак, а На Фіг.7 показано далі, що відповідну профіломоже бути охарактеризований також будь-якою граму PG, часткові профілограми PGa, PGb, PGc іншою сукупністю певних ознак зі всіх розкритих, або загальну профілограму GPG можна порівняти загалом, окремих ознак. Це означає, що, в принвідповідно з однією або декількома еталонними ципі, практично будь-яка окрема ознака п.1 може профілограмами - еталонною профілограмою ВР1 бути випущена або замінена, щонайменше, однією для максимальних виміряних значень zB профілю окремою ознакою, розкритою в іншому місці заявΡ і еталонною профілограмою ВР2 для максимаки. У цьому відношенні п.1 потрібно розуміти лише льних виміряних значень zΒ профілю Ρ - і визначияк першу спробу формулювання винаходу. ти відповідні відхилення APG від відповідної етаПерелік посилальних позицій лонної профілограми ВР1, ВР2. У зображеному R2=x32+z32 13 (5) 15 86765 1 - тверде тіло 1а - колесо 2 - лазерний пристрій 3, 3а, 3b, 3с, 3c1, 3с2, 3c3 - світлові смуги 4 - лінза 5 - пристрій відображення 6 - світлоприймач 7 - корпус 8 - стенд для контролю зносу 9 - рейка 10 - рейковий транспортний засіб А-А - оптична вісь В - базова відстань b - ширина Dz - діапазон вимірювання dzA – розрізнення S3 D1, D2 - зовнішні поверхні f- частота GPG - загальна профілографа Η - відстань між 4 і 6 3с Κν - поправкове значення, відповідне ν, ω Ко - поправкове значення, відповідне ділянці/положенню 3, 3а, 3b, 3с, 3c1, 3с2, 3c3 k - коефіцієнт, що відповідає N1, N2 або Dt L - робоча відстань LB - довжина ліній 3, 3а, 3b, 3с, 3c1, 3с2, 3c3 Μ - бічна поверхня N1, N2 - відстані між 3c1, 3с2, 3c3 16 O-O - оптична вісь Ρ - профіль PG - профілограми PGa, PGb, PGc - часткові профілограми R - радіус RL - відбите світло ν - швидкість поступального руху 1,1а tk, t1, t2, t3 - моменти вимірювань S1, S2, S3 - точки на колі навколо R s1, s2, s3 - довжини хорд x - координата довжини хА- положення плями зображення хmах - максимальне значення x хmin - мінімальне значення x x1, x2, х3 - виміряні значення довжини у S1, S2, у - координата довжини z - координата висоти zΑ - виміряне значення, місце падіння 3, 3а, 3b, zΒ - коректоване виміряне значення із zΑ zmax - максимальне значення z zmin - мінімальне значення z z1, z2, z3 - виміряні значення висоти у S1, S2, S3 PG - відхилення профілю t - інтервал часу φ - тріангуляційний кут 17 86765 18 19 Комп’ютерна верстка Л. Купенко 86765 Підписне 20 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for contact-less dynamical determination of profile of solid body
Автори англійськоюHoffmann Manfred, Walter Michel J., Hoffmann Dieter, Brinkmann Andreas
Назва патенту російськоюСпособ бесконтактного динамического определения профиля твердого тела
Автори російськоюХоффманн Манфред, Вальтер Михель Й., Хоффманн Дитер, Бринкманн Андреас
МПК / Мітки
МПК: G01B 11/00, G01B 11/30, G01B 11/24, B61K 9/00
Мітки: твердого, визначення, динамічного, безконтактного, тіла, спосіб, профілю
Код посилання
<a href="https://ua.patents.su/10-86765-sposib-bezkontaktnogo-dinamichnogo-viznachennya-profilyu-tverdogo-tila.html" target="_blank" rel="follow" title="База патентів України">Спосіб безконтактного динамічного визначення профілю твердого тіла</a>
Спосіб визначення зміни внесків структурного та температурного розупорядкування в урбахівську енергію твердого кристалічного тіла при фазовому переході першого роду
Номер патенту: 31018
Опубліковано: 25.03.2008
Автор: Студеняк Ігор Петрович
МПК: G01K 7/00
Мітки: урбахівську, переході, тіла, енергію, розупорядкування, структурного, кристалічного, роду, спосіб, температурного, першого, зміни, внесків, фазовому, твердого, визначення
Формула / Реферат:
Спосіб визначення зміни внесків структурного та температурного розупорядкування в урбахівську енергію твердого кристалічного тіла при фазовому переході першого роду, який включає визначення внесків структурного та температурного розупорядкування шляхом температурних досліджень краю оптичного поглинання твердих кристалічних тіл, який відрізняється тим, що визначають зміну урбахівської енергії DЕU при температурі фазового переходу першого роду...
Спосіб визначення зміни внесків структурного та температурного розупорядкування в урбахівську енергію твердого кристалічного тіла при фазовому переході другого роду
Номер патенту: 25921
Опубліковано: 27.08.2007
Автор: Студеняк Ігор Петрович
МПК: G01K 17/08
Мітки: температурного, спосіб, урбахівську, внесків, кристалічного, енергію, переході, розупорядкування, твердого, другого, фазовому, тіла, визначення, роду, структурного, зміни
Формула / Реферат:
Спосіб визначення зміни внесків структурного та температурного розупорядкування в урбахівську енергію твердого кристалічного тіла при фазовому переході другого роду, що включає визначення внесків температурного та структурного розупорядкування шляхом температурних досліджень краю оптичного поглинання твердих тіл, який відрізняється тим, що додатково визначають урбахівську енергію
Спосіб керування примежовим шаром при обтіканні потоком твердого тіла за рахунок подачі струму газу
Номер патенту: 15562
Опубліковано: 17.07.2006
Автор: Сімаков Микола Андрійович
МПК: F15D 1/00
Мітки: примежовим, спосіб, твердого, струму, газу, керування, потоком, рахунок, обтіканні, подачі, шаром, тіла
Формула / Реферат:
Спосіб керування примежовим шаром при обтіканні потоком твердого тіла за рахунок подачі струму газу, який полягає в тому, що газ підводять до конфузорного сопла, формуюючи струмінь, обертають його і, вприскуючи у потік, стабілізують його, який відрізняється тим, що збільшується довжина активного відрізку струменя у примежовому шарі, турбулентність зменшується, зростає швидкість двофазного потоку і він стає більш стабільним.
Спосіб екстрагування з твердого тіла
Номер патенту: 18460
Опубліковано: 15.11.2006
Автори: Ряшко Галина Михайлівна, Бурдо Олег Григорович
МПК: B01D 11/00
Мітки: твердого, спосіб, тіла, екстрагування
Формула / Реферат:
Спосіб екстрагування з твердого тіла, що передбачає контактування твердого тіла з розчинником та діяння на систему тверде тіло - розчинник при періодичній зміні тиску, який відрізняється тим, що як тверде тіло використовують тверду рослинну сировину, а періодичну зміну тиску в інтервалі від 0,04МПа до 0,16МПа здійснюють шляхом обробки системи імпульсним мікрохвильовим полем з частотою хвиль 2450 ± 0,05Мгц.
Спосіб екстрагування з твердого тіла
Номер патенту: 6651
Опубліковано: 16.05.2005
Автори: Гумницький Ярослав Михайлович, Сеньків Віктор Миколайович, Юрим Микола Федорович
МПК: B01D 11/00
Мітки: твердого, тіла, спосіб, екстрагування
Формула / Реферат:
Спосіб екстрагування з твердого тіла шляхом контактування його з розчинником в основному і додатковому об'ємах при періодичній зміні тиску, який відрізняється тим, що зміну тиску здійснюють в інтервалі від атмосферного до розрідження, а як додатковий об'єм використовують тверде тіло.
Попередній патент: Спосіб одержання керамічного покриття та композитний виріб з керамічним покриттям
Наступний патент: Одноразовий шприц
Випадковий патент: Спосіб виробництва оксидованадієвого каталізатора