Маніпуляційний пристрій для елементів розливних жолобів
Номер патенту: 88235
Опубліковано: 25.09.2009
Автори: Таугербек Ральф, Кройц Ганс-Отто, Горза Роберт

Формула / Реферат
1. Маніпуляційний пристрій (10) для елементів розливних жолобів шахтної печі, особливо, для кришок жолобів (70, 70'), що включає в себе несучу основу (12), розташовану збоку від вищевказаного розливного жолоба, раму (14), що підтримується вищевказаною несучою основою (12) і з'єднана з нею за допомогою підшипника (38), що визначає собою першу вісь обертання (А), розташовану по суті вертикально, причому вищевказана рама (14) установлена з можливістю обертання навколо першої осі обертання щодо вищевказаного несучої основи (12), піднімальний важіль (16), що має першу кінцеву ділянку (18) і другу кінцеву ділянку (20), при цьому вищевказана перша кінцева ділянка (18) з'єднана з вищевказаною рамою (14) за допомогою щонайменше першого поворотного зчленування (22), що визначає собою другу вісь обертання (В), розташовану по суті горизонтально, причому вищевказаний піднімальний важіль (16) установлений з можливістю повороту навколо другої осі обертання для опускання або піднімання його другої кінцевої ділянки (20), маніпуляційний елемент (24), з'єднаний з вищевказаною другою кінцевою ділянкою (20) вищевказаного піднімального важеля (16) за допомогою другого поворотного зчленування (54), що визначає собою третю вісь обертання (С), що лежить у площині, по суті перпендикулярній вищевказаній другій осі обертання (В), причому вищевказаний маніпуляційний елемент (24) виконаний з можливістю повороту щодо вищевказаного піднімального важеля (16) навколо другої осі обертання (В), і вилковий захват (26), з'єднаний з вищевказаним маніпуляційним елементом (24) і розташований з можливістю захоплювання, переміщення й опускання таких елементів.
2. Пристрій за п. 1, який відрізняється тим, що вищевказана рама (14) містить у собі поворотний елемент (28), при цьому вищевказаний поворотний елемент (28) з'єднаний з вищевказаною рамою (14) за допомогою третього поворотного зчленування (30), що визначає собою четверту вісь обертання (D), паралельну вищевказаній другій осі обертання (В), у якому вищевказаний піднімальний важіль (16) з'єднаний з вищевказаним поворотним елементом (28) з можливістю виконання вищевказаним піднімальним важелем (16) переміщення вперед/назад відносно вищевказаної рами (14).
3. Пристрій за п. 1, який відрізняється тим, що включає в себе прямолінійно ковзне зчленування (135), що з'єднує вищевказаний вилковий захват (126) з вищевказаним маніпуляційним елементом (124) таким чином, що вищевказаний вилковий захват (126) може переміщатися вперед/назад щодо вищевказаного піднімального важеля (116).
4. Пристрій за п. 1, який відрізняється тим, що включає в себе перший піднімальний штир (227) і другий піднімальний штир (229), при цьому зазначені перший й другий піднімальні штирі (227, 229) прикріплені по суті перпендикулярно до першого й другого зубців (272) вищевказаного вилкового захвата (226) таким чином, що вищевказаний маніпуляційний пристрій (210) виконано з можливістю захвату таких елементів за рахунок обертання вищевказаної рами (214) навколо першої осі обертання й/або обертання вищевказаного маніпуляційного елемента (222) навколо третьої осі обертання.
5. Пристрій за будь-яким із пп. 1-4, який відрізняється тим, що включає в себе перший гідравлічний циліндр (32), шарнірно з'єднаний з вищевказаною рамою (14) і вищевказаним піднімальним важелем (16) і призначений для піднімання й опускання вищевказаної другої кінцевої ділянки (20) вищевказаного піднімального важеля (16).
6. Пристрій за будь-яким із пп. 1-5, який відрізняється тим, що включає в себе перший сервопривід (44), прикріплений до вищевказаної рами (14), і перший зубчастий вінець (46) внутрішнього зачеплення, прикріплений до вищевказаної несучої основи (12) і співвісний з першою віссю обертання (А), при цьому вищевказаний перший сервопривід (44) містить у собі зубчасте колесо (48), що входить у зачеплення з першим зубчастим вінцем (46) і призначене для обертання вищевказаної рами (14) щодо вищевказаної несучої основи (12).
7. Пристрій за п. 6, який відрізняється тим, що вищевказаний маніпуляційний пристрій (10), вищевказаний перший сервопривід (44) і вищевказаний перший зубчастий вінець (46) забезпечують поворот вищевказаної рами (14) на кут, більший за 200°.
8. Пристрій за будь-яким з пп. 1-7, який відрізняється тим, що включає в себе другий сервопривід (68), прикріплений до вищевказаного піднімального важеля (16), і другий зубчастий вінець (66) внутрішнього зачеплення, прикріплений до вищевказаного маніпуляційного елемента (24) і центрований по вищевказаній третій осі обертання (С), при цьому другий сервопривід (68) містить у собі зубчасте колесо (70), що входить у зачеплення із другим зубчастим вінцем (66) і призначене для обертання вищевказаного маніпуляційного елемента (24) щодо вищевказаного піднімального важеля (16).
9. Пристрій за п. 8, який відрізняється тим, що вищевказаний маніпуляційний пристрій (10), вищевказаний другий сервопривід (68) і вищевказаний другий зубчастий вінець (66) забезпечують поворот вищевказаного маніпуляційного елемента (24) на кут, що приблизно дорівнює 180°.
10. Пристрій за п. 2, який відрізняється тим, що включає в себе другий гідравлічний циліндр (34), шарнірно з'єднаний з вищевказаною рамою (14) і вищевказаним поворотним елементом (28) і призначений для виконання вищевказаного переміщення вперед/назад вищевказаного піднімального важеля (16) за рахунок обертання вищевказаного поворотного елемента (28).
11. Пристрій за п. 3, який відрізняється тим, що включає в себе другий гідравлічний циліндр (134), з'єднаний з вищевказаним вилковим захватом (26) і вищевказаним маніпуляційним елементом (24) і призначений для виконання вищевказаного переміщення вперед/назад вищевказаного вилкового захвата (26).
12. Використання маніпуляційного пристрою за будь-яким із пп. 1-11 в установці доменної печі, при якому маніпуляційний пристрій (10, 110, 210) розміщують між двома сусідніми головними жолобами (76, 78), які виходять в радіальному напрямку з вищевказаної доменної печі (75), для зняття, установки в стоянкове положення, установки на місце й/або заміни обох кришок (70, 70') двох головних жолобів (76, 78) доменної печі.
13. Установка доменної печі, що включає в себе маніпуляційний пристрій (10, 110, 210) за будь-яким із пп. 1-10 і щонайменше два розташованих поруч розливних жолоби (76, 78), які виходять в радіальному напрямку від вищевказаної доменної печі (75), причому вищевказана несуча основа (12) розташована на підлозі ливарного двору вищевказаної установки доменної печі по суті на лінії бісектриси кута, утвореного двома вищевказаними розливними жолобами.
14. Установка за п. 13, яка відрізняється тим, що робочий діапазон вищевказаного маніпуляційного пристрою (10, 110, 210) перевищує відстань між вищевказаною першою віссю обертання (А) і центральними осями вищевказаних розливних жолобів (76, 78).
15. Установка за п. 13 або 14, яка відрізняється тим, що вищевказана несуча основа (12) розташована на підлозі ливарного двору на відстані від зовнішнього корпусу вищевказаної доменної печі (75), що перевищує робочий діапазон вищевказаного маніпуляційного пристрою (10, 110, 210).
Текст
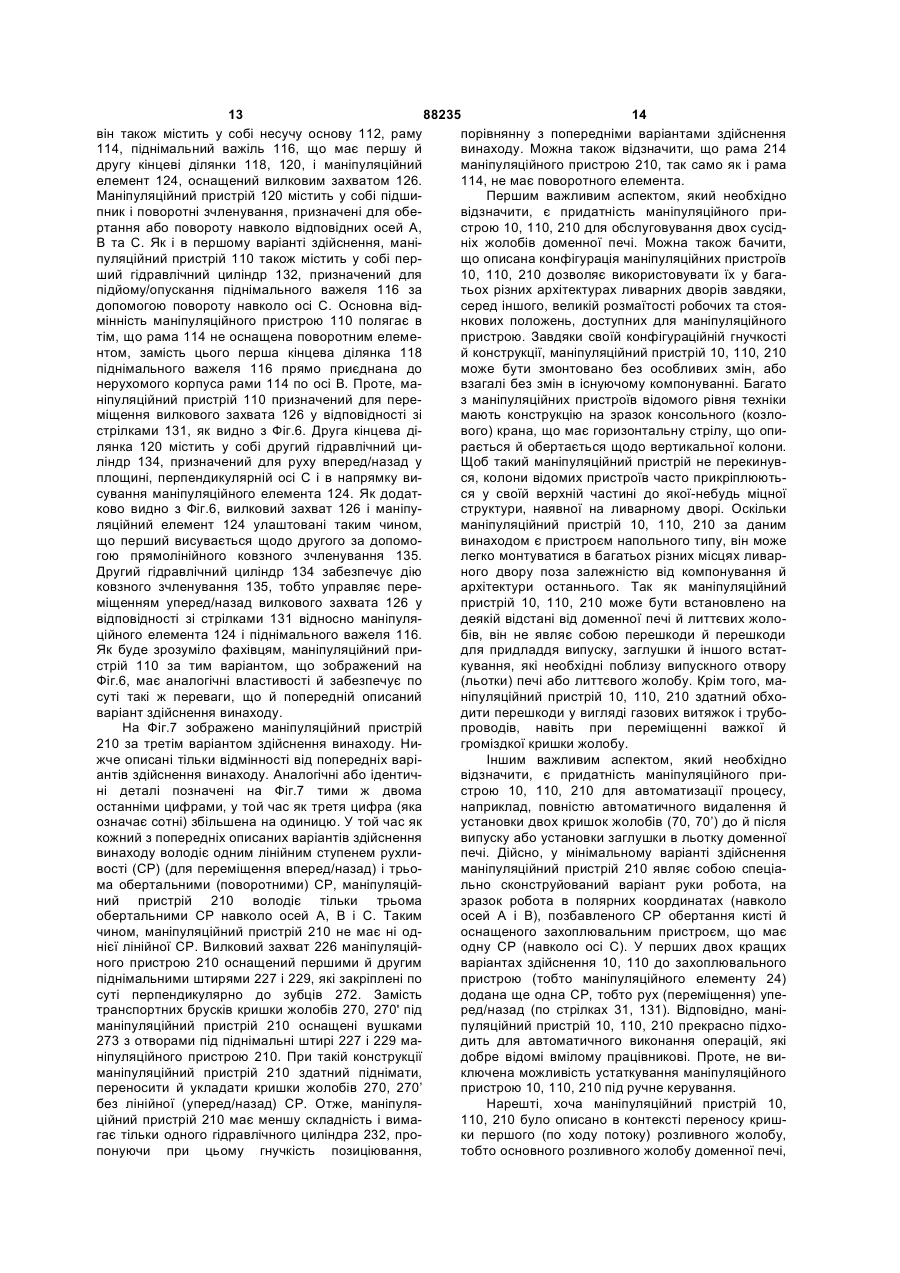
1. Маніпуляційний пристрій (10) для елементів розливних жолобів шахтної печі, особливо, для кришок жолобів (70, 70'), що включає в себе несучу основу (12), розташовану збоку від вищевказаного розливного жолоба, раму (14), що підтримується вищевказаною несучою основою (12) і з'єднана з нею за допомогою підшипника (38), що визначає собою першу вісь обертання (А), розташовану по суті вертикально, причому вищевказана рама (14) установлена з можливістю обертання навколо першої осі обертання щодо вищевказаного несучої основи (12), піднімальний важіль (16), що має першу кінцеву ділянку (18) і другу кінцеву ділянку (20), при цьому вищевказана перша кінцева ділянка (18) з'єднана з вищевказаною рамою (14) за допомогою щонайменше першого поворотного зчленування (22), що визначає собою другу вісь обертання (В), розташовану по суті горизонтально, причому вищевказаний піднімальний важіль (16) установлений з можливістю повороту навколо другої осі обертання для опускання або піднімання його другої кінцевої ділянки (20), маніпуляційний елемент (24), з'єднаний з вищевказаною другою кінцевою ділянкою (20) вищевказаного піднімального важеля (16) за допомогою другого поворотного зчленування (54), що визначає собою третю вісь обертання (С), що лежить у площині, по суті перпендикулярній вищевказаній другій осі обертання (В), причому вищевказаний маніпуляційний елемент (24) виконаний з можливістю повороту щодо вищевказаного піднімального важеля 2 (19) 1 3 88235 4 від (44), прикріплений до вищевказаної рами (14), і важеля (16) за рахунок обертання вищевказаного перший зубчастий вінець (46) внутрішнього зачепповоротного елемента (28). лення, прикріплений до вищевказаної несучої ос11. Пристрій за п. 3, який відрізняється тим, що нови (12) і співвісний з першою віссю обертання включає в себе другий гідравлічний циліндр (134), (А), при цьому вищевказаний перший сервопривід з'єднаний з вищевказаним вилковим захватом (26) (44) містить у собі зубчасте колесо (48), що вхоі вищевказаним маніпуляційним елементом (24) і дить у зачеплення з першим зубчастим вінцем (46) призначений для виконання вищевказаного переі призначене для обертання вищевказаної рами міщення вперед/назад вищевказаного вилкового (14) щодо вищевказаної несучої основи (12). захвата (26). 7. Пристрій за п. 6, який відрізняється тим, що 12. Використання маніпуляційного пристрою за вищевказаний маніпуляційний пристрій (10), вибудь-яким із пп. 1-11 в установці доменної печі, щевказаний перший сервопривід (44) і вищевказапри якому маніпуляційний пристрій (10, 110, 210) ний перший зубчастий вінець (46) забезпечують розміщують між двома сусідніми головними жолоповорот вищевказаної рами (14) на кут, більший за бами (76, 78), які виходять в радіальному напрям200°. ку з вищевказаної доменної печі (75), для зняття, 8. Пристрій за будь-яким з пп. 1-7, який відрізняустановки в стоянкове положення, установки на ється тим, що включає в себе другий сервопривід місце й/або заміни обох кришок (70, 70') двох го(68), прикріплений до вищевказаного піднімальноловних жолобів (76, 78) доменної печі. го важеля (16), і другий зубчастий вінець (66) вну13. Установка доменної печі, що включає в себе трішнього зачеплення, прикріплений до вищевкаманіпуляційний пристрій (10, 110, 210) за будьзаного маніпуляційного елемента (24) і яким із пп. 1-10 і щонайменше два розташованих центрований по вищевказаній третій осі обертання поруч розливних жолоби (76, 78), які виходять в (С), при цьому другий сервопривід (68) містить у радіальному напрямку від вищевказаної доменної собі зубчасте колесо (70), що входить у зачепленпечі (75), причому вищевказана несуча основа (12) ня із другим зубчастим вінцем (66) і призначене розташована на підлозі ливарного двору вищевкадля обертання вищевказаного маніпуляційного заної установки доменної печі по суті на лінії бісекелемента (24) щодо вищевказаного піднімального триси кута, утвореного двома вищевказаними розважеля (16). ливними жолобами. 9. Пристрій за п. 8, який відрізняється тим, що 14. Установка за п. 13, яка відрізняється тим, що вищевказаний маніпуляційний пристрій (10), виробочий діапазон вищевказаного маніпуляційного щевказаний другий сервопривід (68) і вищевказапристрою (10, 110, 210) перевищує відстань між ний другий зубчастий вінець (66) забезпечують вищевказаною першою віссю обертання (А) і поворот вищевказаного маніпуляційного елемента центральними осями вищевказаних розливних (24) на кут, що приблизно дорівнює 180°. жолобів (76, 78). 10. Пристрій за п. 2, який відрізняється тим, що 15. Установка за п. 13 або 14, яка відрізняється включає в себе другий гідравлічний циліндр (34), тим, що вищевказананесуча основа (12) розташошарнірно з'єднаний з вищевказаною рамою (14) і вана на підлозі ливарного двору на відстані від вищевказаним поворотним елементом (28) і призовнішнього корпусу вищевказаної доменної печі значений для виконання вищевказаного перемі(75), що перевищує робочий діапазон вищевказащення вперед/назад вищевказаного піднімального ного маніпуляційного пристрою (10, 110, 210). Даний винахід відноситься до маніпуляційного пристрою для елементів розливних жолобів шахтної печі, а саме, кришок головних жолобів доменної печі. Відомо, що для того, щоб зменшити викид шкідливих речовин і зменшити теплове випромінювання в ливарному дворі доменної печі, розливний жолоб (також називаний лоток або тигель) накривають, щонайменше, одним знімним захисним елементом (кришкою). Такі кришки жолобів являють собою подовжені металеві короби, оснащені зсередини вогнетривкою футеровкою. Їхні розміри можуть становити кілька метрів у довжину й кілька метрів завширшки, а маса може значно перевищувати 10000кг. Проте, для того, щоб відкривати й закривати розливний отвір, необхідно забирати верхню (на початку потоку) кришку жолобів, тобто ту кришку жолобів, що розташована безпосередньо під розливним отвором. Звичайно верхню кришку жолобів забирають у стоянкове положення, а потім устано влюють назад перед розливним отвором. Проведення таких операцій утруднено через звичайні розміри й масу кришки жолобів. Тому до теперішнього часу було розроблено кілька пристроїв, спеціально призначених для виконання цієї операції. Патент US 4 786 250 описує транспортний пристрій для переміщення знімного кожуха (кришки) розливного жолобу з метою звільнення місця для розміщення встаткування для випуску плавки й стопоріння. Пристрій містить у собі візок, що переміщається по рейках, підвісний і піднімальний механізм, а також рамкову структуру, на яку укладаються рейки. Підвісний і піднімальний механізм для підйому й опускання кожуха встановлюється на візок, що може переміщатися по рейках для транспортування знімного кожуха. Заявка WO 01/79565 описує пристрій для виконання маніпуляцій із кришкою розливного лотка (жолобу) доменної печі. Він містить у собі несучу конструкцію, розташовану пов'язаною з лотком з головним опорним важелем, з'єднаним з несучою 5 88235 6 конструкцією циліндричним зчленуванням. Втоі раму, що опирається на несучу підставу й приєдринний маніпулятор приєднується до головного нується до нього за допомогою підшипника, що опорного важеля, а несучий елемент до другого визначає собою першу вісь обертання, по суті веропорного важеля, кожне відповідне зчленування є тикальну, навколо якого рама може обертатися циліндричним. Тристороннє й паралельне циліндщодо несучої основи. Пристрій додатково містить ричне зчленування пристрою дозволяє переміщау собі піднімальний важіль, що має першу кінцеву ти першу (по ходу потоку) кришку, наприклад, у ділянку й другу кінцеву ділянку, при цьому перша напрямку, паралельному площині кришки, у стоянкінцева ділянка приєднана до рами за допомогою, кове положення над розташованою нижче по ходу щонайменше, першого поворотного зчленування, потоку кришкою. що визначає собою другу вісь обертання, по суті Патент DE 39 33 894 описує поворотний і підгоризонтальну, навколо якої піднімальний важіль німальний пристрій для кришки жолобу доменної може обертатися для того, щоб опускати й підніпечі. Пристрій містить у собі вертикальну стійку, мати другу кінцеву ділянку. Маніпуляційний елещо пристиковується до розливного отвору та обемент приєднаний до другої кінцевої ділянки підніртається навколо поздовжньої осі. До вертикальмального важеля за допомогою другого ної стійки кріпиться консольний важіль, вільний поворотного зчленування, що визначає собою кінець якого оснащений піднімальним пристроєм зі третю вісь обертання, що лежить у площині, по спеціальним пристосуванням для підхоплення суті перпендикулярної другої осі обертання, накришки жолобу. вколо якої маніпуляційний елемент може обертаВсі відомі пристрої, зазначені вище, мають тися щодо піднімального важеля. Крім того, маніодин загальний недолік - відносно обмежена мапуляційний пристрій за даним винаходом містить у невреність при установці й переміщенні кришки собі вилковий захват, з'єднаний з маніпуляційним жолобу. Крім того, вони призначені для роботи із елементом і розташований таким чином, щоб закришкою тільки окремо взятого, одного жолобу. безпечувати захоплювання, переміщення й опусОтже, при експлуатації стандартної доменної печі, кання елементів жолобів. що включає в себе безліч жолобів, такі пристрої Такий пристрій забезпечує приєднандоводиться розміщати в кожному жолобі. ня/від'єднання елемента жолобу, такого, як кришка JP 10-317026 описує пристрій, принципово жолобу, без додаткового ручного втручання. Він аналогічний пристрою, описаному в патенті DE 39 дозволяє піднімати, переміщати з робочого поло33 894, але призначений для обслуговування двох ження в стоянкове положення й назад і опускати жолобів, розташованих у різних місцях. Таким читакі елементи без використання додаткових інном, кількість пристроїв, необхідних для доменної струментів і операцій. Крім того, такий пристрій печі, у якій є кілька жолобів, може бути зменшено, забезпечує високу маневреність при установці й що веде до відповідного скорочення витрат (див. переміщенні елементів жолобу, а саме, кришок Фіг.1 і Фіг.4 в JP 10-317026). Проте, можливості по жолобів. Зокрема, це дозволяє використати один установці й маніпулюванню такою кришкою жолопристрій для обслуговування двох сусідніх жолобу, що описується в JP 10-317026, також обмежебів. Крім того, такий пристрій відносно універсальні. ний за місцем свого монтажу. Він може бути доВільний простір ливарного двору, у якому мосить легко автоматизованим, тому що має жна розміщати додаткові пристрої, звичайно дуже конструкцію спеціалізованої руки робота. Відповіобмежений. Це - ще одна причина для зменшення дно, можна досягти економії трудових витрат і підкількості маніпуляційних пристроїв. Через обмевищення безпеки праці. Пристрій є автономним, жений простір ті стоянкові положення, які можуть підлоговим і, за винятком несучої основи, не вимабути досягнуті пристроями з відомого рівня технігає додаткових точок кріплення на ливарному двоки, часто важкодоступні. Крім того, ці відомі прирі. Він може мати відносно невелику середню вистрої мають відносно громіздку конструкцію й, як соту, навіть у повністю піднятому положенні, так правило, потрібне спеціальне пристосування для що може монтуватися під відносно невисокими їхнього кріплення над підлогою ливарного двору. службовими містками. Нарешті, до головного жолобу часто примикають За першим варіантом здійснення винаходу різні об'єкти, наприклад, інше встаткування або рама містить у собі поворотний елемент, що з'єднерухомі конструкції, які необхідно обходити при наний з рамою за допомогою третього поворотнопереміщенні кришки жолобу з робочого положення го зчленування, що визначає собою четверту вісь в стоянкове положення. обертання, що паралельна другої осі обертання. Відповідно, метою даного винаходу є створенПри цьому піднімальний важіль з'єднаний з повоня маніпуляційного пристрою для елементів розротним елементом таким чином, що піднімальний ливних жолобів, а саме, для кришок жолобів, що важіль може робити рух уперед/назад щодо рами. дозволяє робити маніпуляції із кришками декількох За другим варіантом здійснення винаходу мажолобів, що має компактну конструкцію й забезпеніпуляційний пристрій містить у собі прямолінійно чує високу маневреність при установці й орієнтації ковзне зчленування, що з'єднує вилковий захват з кришки жолобу. маніпуляційним елементом таким чином, що вилДля досягнення цієї мети даний винахід проковий захват може виконувати поступальне перепонує маніпуляційний пристрій для елементів розміщення вперед/назад щодо піднімального важеливних жолобів шахтної печі, а саме, для кришок ля. Замість того щоб переміщати вперед/назад жолобів. Такий пристрій містить у собі несучу освесь піднімальний, важіль, у даному варіанті здійнову, що розташовується на підлозі ливарного снення винаходу переміщається тільки вилковий двору доменної печі, збоку від розливного жолобу, захват. 7 88235 8 За третім варіантом здійснення винаходу маВідповідно, даний винахід також описує устаніпуляційний пристрій містить у собі перший підніновку доменної печі, що включає в себе маніпулямальний штифт і другий піднімальний штифт, приційний пристрій за даним винаходом й, щонаймекріплені по суті перпендикулярно до першого й нше, два розташованих недалеко один від одного другого зубців вилкового захвата відповідно. Тарозливних жолоба, що відходять у радіальному ким чином, маніпуляційний пристрій здатний захонапрямку від доменної печі. При цьому несуча плювати жолобні елементи винятково за рахунок основа маніпуляційного пристрою розташована на обертання рами навколо першої осі обертання підлозі ливарного двору доменної печі по суті на й/або обертання маніпуляційного елемента навколінії бісектриси кута, утвореного поздовжніми осяло третьої осі обертання. Отже, немає необхідносми двох розливних жолобів. Переважно, щоб у ті в переміщенні вперед/назад вилкового захвата, такій установці ширина робочого діапазону манів умовах, при яких такий варіант здійснення має пуляційного пристрою перевищувала відстань між достатню маневреність. першою віссю обертання й центральною віссю Переважно, щоб маніпуляційний пристрій місрозливних жолобів. Крім того, переважно, щоб тив у собі перший гідравлічний циліндр, шарнірно несуча основа розташовувалася на підлозі ливарз'єднаний з рамою й піднімальним важелем і приного двору на відстані від зовнішнього корпуса значений для підйому й опускання другої кінцевої доменної печі, що перевищує ширину робочого ділянки піднімального важеля. діапазону маніпуляційного пристрою. Для забезпечення великого кута повороту раДаний винахід і його переваги пояснені більш ми маніпуляційний пристрій може містити в собі докладно в наступному описі, який не обмежує перший сервопривод, прикріплений до рами, і печисла варіантів здійснення, з посиланням на прирший зубчастий вінець внутрішнього зачеплення, кладені фігури. На малюнках для позначення тих прикріплений до несучої основи й центрований по самих або аналогічних елементів використовуютьпершій осі обертання, при цьому перший сервопся ті самі цифри. ривод містить у собі зубчасте колесо, що перебуФіг.1. Вид збоку маніпуляційного пристрою за ває в зачепленні з першим зубчастим вінцем і припершим варіантом здійснення; значене для обертання рами щодо несучої основи. Фіг.2. Вид зверху маніпуляційного пристрою, У такому випадку, маніпуляційний пристрій, перзображеного на Фіг.1; ший сервопривод і перший зубчастий вінець заФіг.3. Поздовжній поперечний переріз по осі IIІбезпечують кут повороту рами, щонайменше, в ІII Фіг.2, маніпуляційний пристрій перебуває у ви200°. сунутому вперед положенні; У кращій конструкції другого поворотного Фіг.4. Поздовжній поперечний переріз по осі зчленування маніпуляційний пристрій має другий IV-IV Фіг.2, маніпуляційний пристрій перебуває в сервопривод, прикріплений до піднімального ваположенні переміщення кришки жолобу; желя, і другий зубчастий вінець внутрішнього заФіг.5. Вид зверху підлоги ливарного двору дочеплення, прикріплений до маніпуляційного елеменної печі з маніпуляційним пристроєм, зображемента й центрований по третій осі обертання, при ним на Фіг.1, у різних положеннях; цьому другий сервопривод містить у собі зубчасте Фіг.6. Вид збоку маніпуляційного пристрою за колесо, що перебуває в зачепленні із другим зудругим варіантом здійснення; бчастим вінцем і призначене для обертання маніФіг.7. Вид зверху маніпуляційного пристрою за пуляційного елемента щодо піднімального важеля. третім варіантом здійснення. При такій конструкції маніпуляційний пристрій, На Фіг.1 і 2 зображено маніпуляційний придругий сервопривод і другий зубчастий вінець застрій, позначений цифрою 10. Маніпуляційний безпечують кут повороту маніпуляційного елеменпристрій 10 містить у собі несучу основу 12 і раму та приблизно в 180°. 14. Несуча основа 12 прикріплена до підлоги лиУ першому варіанті здійснення винаходу маніварного двору відповідними пристосуваннями й пуляційний пристрій переважно містить у собі друслужить стійкою площадкою для розміщення манігий гідравлічний циліндр, шарнірно з'єднаний з пуляційного пристрою 10. Рама 14 з'єднана з нерамою й поворотним елементом і призначений сучою основою 12 за допомогою підшипника (опидля переміщення вперед/назад піднімального васаний нижче), що визначає собою першу вісь желя за рахунок обертання поворотного елемента. обертання А, по суті вертикальну. Отже, рама 14 У другому варіанті здійснення винаходу маніпідтримується несучою основою 12 і обертається пуляційний пристрій переважно містить у собі друщодо нього навколо осі А. Фахівцям буде зрозумігий гідравлічний циліндр, з'єднаний з вилковим ло, що несуча основа 12 і рама 14 можуть бути захватом і маніпуляційним елементом і призначесконструйовані таким чином, щоб забезпечувати ний для переміщення вперед/назад вилкового заобертання на 360°. Кут повороту, однак, може бути хвата. обмежений конструктивними вимогами, наприМаніпуляційний пристрій за дійсним винахоклад, необхідністю запобігання зіткнення з іншими дом призначено для використання в установці нерухомими конструкціями. Маніпуляційний придоменної печі із двома розташованими недалеко стрій 10 додатково містить у собі піднімальний друг від друга головними жолобами, що радіально важіль 16, що має першу кінцеву ділянку 18 і провиходять із доменної печі, для видалення, примітилежну другу кінцеву ділянку 20. Перша кінцева щення в стоянкове положення, установки й/або ділянка 18 піднімального важеля 16 з'єднана з заміни двох кришок двох вищевказаних жолобів. рамою 14 за допомогою першого поворотного При цьому маніпуляційний пристрій установлюєтьзчленування 22, що визначає собою другу вісь ся між цими двома жолобами. обертання В, по суті горизонтальну. Перше пово 9 88235 10 ротне зчленування 22 має стандартну конструкцію, тобто складної в таку конфігурацію, коли піднімазнайому будь-якому кваліфікованому фахівцеві. льний важіль 16 лежить на верхньому краї рами Таким чином, піднімальний важіль 16 може обер14. Як можна бачити, піднімальний важіль 16 і рататися навколо осі В у вертикальної площини й ма 14 утворять, разом з поворотним елементом 28 призначений для опускання й підйому другої кіні гідравлічним циліндром 32, кінематичний ланцюг, цевої ділянки 20 у напрямку стрілок 23. Маніпуляу якій рама 14 є нерухомою ланкою. Такий ланцюг ційний пристрій 10 також містить у собі маніпулявизначає хід для підйому й опускання в напрямку ційний елемент 24, з'єднаний із другою кінцевою стрілок 23 і переміщення вперед/назад у напрямку ділянкою 20 піднімального важеля 16 за допомострілок 31. гою другого поворотного зчленування (описаний На Фіг.3 зображено маніпуляційний пристрій нижче), що визначає собою третю вісь обертання 10 у конфігурації, при якій піднімальний важіль 16 С, що лежить у геометричній площині, перпендиповністю висунуто уперед, якщо порівнювати з кулярній осі В, і проходить через вісь А (насправді, Фіг.1 і Фіг.2. Це досягається за рахунок повного вісь С нахилена в цій площині за рахунок піднімавтягування гідравлічного циліндра 34, що повертає льного важеля 16, що обертається навколо осі В). поворотний елемент 28 у положення, зображене Отже, маніпуляційний елемент 24 обертається на Фіг.3. навколо осі С відносно піднімального важеля 16 у На Фіг.3 більш докладно зображений підшипнапрямку стрілок 25. Крім того, маніпуляційний ник 38, що визначає собою вісь А. Підшипник 38 є елемент 24 може підніматися й опускатися в нароликовим, тобто підшипником антифрикційного прямку стрілок 23, як описано вище. Вилковий затипу, і містить у собі внутрішню обойму 40 і зовніхват 26 прикріплений до маніпуляційного елеменшню обойму 42, між якими перебувають металеві та 24 і призначений для захоплювання й кульки. Внутрішня обойма 40 міцно з'єднана з неутримання елементів розливних жолобів, зокрема, сучою основою 12, тоді як зовнішня обойма 42 кришок жолобів. міцно з'єднана з рамою 14. Обидві обойми 40, 42 Як видно з Фіг.1 і 2, рама 14 містить у собі порозташовані центровано й коаксиально по осі А. воротний елемент 28, ділянка нижнього кінця якого Таке розташування дозволяє підшипнику 38 виз'єднується з рамою 14 за допомогою третього тримувати навантаження, що падають на витягнуповоротного зчленування 30. Третє поворотне того вилкового захвата 26, що становлять 20 000кг зчленування 30 має стандартну конструкцію, анаі більше. На Фіг.3 також зображений перший серлогічну конструкції поворотного зчленування 22, і вопривод 44, прикріплений до рами 14, і перший визначає собою четверту вісь обертання D, паразубчастий вінець 46, що має внутрішнє зачеплення лельну осі В, тобто по суті горизонтальну. Підній прикріплений до несучої основи 12, наприклад, мальний важіль 16 з'єднується з рамою 14 ділянза допомогою приварювання його до внутрішньої кою верхнього кінця поворотного елемента 28. За обойми 40. Сервопривод 44 і зубчастий вінець 46 рахунок обертання поворотного елемента 28 напускають у хід підшипник 38. Зубчастий вінець 46 вколо осі D піднімальний важіль 16 переміщається центрований по першій осі обертання А. Сервопвперед/назад щодо рами 14 у напрямку стрілок 31. ривод 44 закріплений усередині передньої частини Як далі видно з Фіг. 1 і 2, маніпуляційний прирами 14 і надає руху зубчастому колесу 48, що стрій 10 містить у собі перший гідравлічний циперебуває в зачепленні із зубчастим вінцем 46. ліндр 32, призначений для підйому й опускання Запуск сервопривода 44 забезпечує обертання піднімального важеля 16. Нижній кінець корпуса рами 14, а також піднімального важеля 16, маніпупершого гідравлічного циліндра 32 шарнірно з'єдляційного елемента 24 і вилкового захвата 26 нананий з ділянкою переднього кінця рами 14, а вервколо осі А. Таке розташування сервопривода 44 і хній кінець його поршня шарнірно з'єднаний із підшипника 38 дозволяє повертати раму 14 на, центральною ділянкою піднімального важеля 16. приблизно, 360° щодо несучої основи 12. Варто Лінія дії першого гідравлічного циліндра 32 лежить відмітити, що маніпуляційний пристрій 10 перевау площині, паралельної або компланарної з вищежно містить у собі додатковий сервопривод, закрівказаною площиною осі С (дивися розріз по осі IIIплений усередині рами 14, аналогічний сервоприIIІ). Межі ходу першого гідравлічного циліндра 32 воду 44, і призначений для розподілу визначають межі підйому й опускання у відповіднавантаження й створення запасу (надмірності) по ності зі стрілками 23. Маніпуляційний пристрій 10 потужності. Як буде зрозуміло фахівцям, установдодатково містить у собі другий гідравлічний цика першого сервопривода 44 усередині обертової ліндр 34, призначений для переміщення вперами 14 і зубчастого вінця 46 на несучій підставі ред/назад піднімального важеля 16. Нижній кінець 12, а не навпаки, скорочує обсяг конструктивних корпуса другого гідравлічного циліндра 34 шарнірзмін, необхідних на рівні підлоги ливарного двору, но з'єднаний з передньою ділянкою рами 14, а і дозволяє створити компактну конструкцію маніверхній кінець його поршня шарнірно з'єднаний із пуляційного пристрою 10. центральною ділянкою поворотного елемента 28. На Фіг.3 далі зображена муфта 50 передачі Другий гідравлічний циліндр 34 надає руху підніпотужності, призначена для передачі гідравлічної мальному важелю 16 за рахунок обертання повой електричної потужності й керування від закріпротного елемента 28. Тут також межі переміщення леного несучої основи 12 на обертову раму 14. у відповідності зі стрілками 31 визначаються консМуфта 50 передачі потужності утворює інтерфейс трукцією другого гідравлічного циліндра 34. При для підведення живлення й керування до перших і необхідності маніпуляційний пристрій 10 може другому гідравлічних циліндрів 32, 34 і першому бути сконструйовано, залежно від загального ходу сервоприводу 44 (а також другому сервоприводу гідравлічних циліндрів 32, 34, повністю складним, 68, що буде описаний далі). Муфта 50 передачі 11 88235 12 потужності містить у собі нерухому вісь 51, устажолобу 70, як видно з Фіг.4, то вона може бути новлену на опорній плиті 52 несучої основи 12, і піднята за рахунок висування гідравлічного цилінвтулку 53, що обертається навколо осі 51. Варто дра 32. Таким чином, кришку жолобу 70 можна відмітити, що додаткова функція осі 51 і втулки 53 перенести в інше місце, наприклад, у стоянкове полягає в герметичній передачі гідравлічної рідини положення за рахунок відповідних обертань навід нерухомих елементів конструкції до рухомих. вколо осей А, В, С і D. Можливі, безумовно, і рухи На Фіг.4 більш докладно зображене друге поу зворотному напрямку. воротне зчленування 54, що визначає собою вісь Фіг.5 являє собою вид у плані різних положень С. Якщо дивитися зверху, то друга кінцева ділянка маніпуляційного пристрою 10 за першим варіан20 піднімального важеля 16 нагадує брус автозчетом здійснення винаходу в установці доменної плення із причепом, тобто він сходить на конус у печі. На Фіг.5 схематично показані доменна піч 75 і напрямку закругленого наконечника (див. також перший й другий жолоби 76, 78, розташовані поФіг.5). Наконечник другої кінцевої ділянки 20 сконблизу друг від друга й які виходять радіально з струйовано як опорну головку 56 для другого подоменної печі 75. Доменна піч 75 може містити в воротного зчленування 54. Як видно з Фіг.4, що собі, наприклад, ще два жолоби й відповідний їм несе головка 56 має зменшену висоту в порівнянні додатковий маніпуляційний пристрій із протилежз іншою частиною другої кінцевої ділянки 20. Неної сторони (не показані). Перша кришка жолобу суча головка 56 має циліндричний наскрізний 70 показана в робочому положенні 81 і в стоянкоотвір, утворюючи втулку підшипника 58 для вала вому (гаражному) положенні 82. Друга кришка жо60, що має цільну з ним верхню головку. Нижній лобу 70’ також показана в робочому положенні 83 і фланець прикріплений знизу вала 60 і служить для в гаражному положенні 84. На Фіг.5 для кожного з його осьового кріплення усередині втулки підшипположень 81, 82, 83 і 84 показане відповідне поника 58. Друге поворотне зчленування 54 додатложення маніпуляційного пристрою 10. Немає ково містить у собі верхній і нижній роликопідшипсумнівів у тім, що маніпуляційний пристрій 10 зданики 62, розташовані у відповідних канавках, тний обслуговувати безліч інших позицій у межах передбачених у несучій головці 56. свого робочого діапазону залежно від реальної Як видно з Фіг.4, маніпуляційний елемент 24 архітектури установки доменної печі. Таким чином, обертово закріплений на валу 60. У своїй верхній один єдиний маніпуляційний пристрій 10 здатний частині маніпуляційний елемент 24 містить у собі переносити як першу кришку жолобу 70, так і другу планшайбу 64, що також кріпиться на валу 60. До кришку жолобу 70' з робочого положення в гаражзахищеної внутрішньої сторони планшайби 64 кріне й навпаки. питься другий зубчастий вінець 66 внутрішнього Як додатково видно з Фіг.5, маніпуляційний зачеплення, центрований по осі С. Другий сервоппристрій 10 розташований на підлозі доменного ривод 68 закріплений у порожнині піднімального двору збоку від кришок жолобів 76, 78 і, по суті, на важеля 16 таким чином, що зубчасте колесо 70 на бісектрисі кута між (центральними осями) двох його провідній осі входить у зачеплення із другим кришок жолобів 76, 78. Крім того, робочий діапазон зубчастим вінцем 66. Таке розташування пускає в маніпуляційного пристрою 10 більше відстані між хід друге поворотне зчленування 54, тобто обервіссю обертання А і центральними осями кришок тає маніпуляційний елемент 24 щодо піднімальножолобів 76, 78. Крім того несуча основа 12 маніпуго важеля 16. Завдяки описаній вище формі другої ляційного пристрою 10 установлена на такій відкінцевої ділянки 20 і формі маніпуляційного елестані від зовнішнього контуру доменної печі 75, що мента 24, маніпуляційний елемент може повертабільше робочого діапазону маніпуляційного притися навколо осі С на кут головним чином в 180°. строю 10. За рахунок цього зовсім виключається Як видно з Фіг.4, описаний вище кінематичний зіткнення, наприклад, із зовнішньою стінкою печі. ланцюг, що включає також у себе піднімальний Як видно з Фіг.5 (особливо, у позиції 82), маніпуважіль 16, улаштовано таким чином, що маніпуляляційний елемент 24 може повертатися у своє ційний елемент 24, точніше - центральна вісь вилграничне положення, у якому він перебуває під кового захвата 26, має по суті горизонтальну орієпрямим кутом, тобто під кутом 90° щодо піднімантацію в тій конфігурації, що показано на Фіг.4. льного важеля 16. Як буде зрозуміло фахівцям, Таким чином, здійснення руху по стрілках 31’ дає описана конфігурація забезпечує поворот маніпуможливість взяти кришку жолобу 70 (показану в ляційного елемента 24 у діапазоні 180° навіть рарозрізі на Фіг.4). По суті, у ході такого руху обидва зом зі переносною кришкою жолобу 70, 70'. Перезубці 72 вилкового захвата 26 підводять під трансважно, щоб хід підйому, забезпечуваний портні штирі 74, передбачені на кришці жолобу 70, гідравлічним циліндром 32, забезпечував висоту як видно з Фіг.4. Рух уперед у відповідності зі стріпідйому на вилковому захваті 26, що перевищує лками 31’ містить у собі опускання вилкового зазагальну висоту кришки жолобу. Така міра забезхвата 26 на деяку величину за рахунок фіксованопечує, при необхідності, заміну кришок жолобу 70, го радіуса поворотного елемента 28 і, якщо 70', наприклад, переміщаючи кришку жолобу 70 необхідно, за рахунок першого гідравлічного цилібезпосередньо з позиції 81 у позицію 83. ндра 32. Залежно від положення маніпуляційного На Фіг.6 зображено мантійний пристрій 110 по пристрою 10 і/або положення й орієнтації кришки другому варіанту здійснення винаходу. Для стисжолобу 70, для правильного підведення зубців 72 лості нижче будуть описані тільки відмінності друпід транспортні штирі 74 можуть знадобитися одне гого варіанта здійснення від вищеописаного перабо більше регулювальних рухів маніпуляційного шого. Дійсно, маніпуляційний пристрій 110, елемента 24 (навколо осі С) і/або рами 14 (навкозображений на Фіг.6, у більшості своїх аспектів ло осі А). Коли вилковий захват 26 бере кришку аналогічно маніпуляційного пристрою 10. А саме, 13 88235 14 він також містить у собі несучу основу 112, раму порівнянну з попередніми варіантами здійснення 114, піднімальний важіль 116, що має першу й винаходу. Можна також відзначити, що рама 214 другу кінцеві ділянки 118, 120, і маніпуляційний маніпуляційного пристрою 210, так само як і рама елемент 124, оснащений вилковим захватом 126. 114, не має поворотного елемента. Маніпуляційний пристрій 120 містить у собі підшиПершим важливим аспектом, який необхідно пник і поворотні зчленування, призначені для обевідзначити, є придатність маніпуляційного приртання або повороту навколо відповідних осей А, строю 10, 110, 210 для обслуговування двох сусідВ та С. Як і в першому варіанті здійснення, манініх жолобів доменної печі. Можна також бачити, пуляційний пристрій 110 також містить у собі перщо описана конфігурація маніпуляційних пристроїв ший гідравлічний циліндр 132, призначений для 10, 110, 210 дозволяє використовувати їх у багапідйому/опускання піднімальноговажеля 116 за тьох різних архітектурах ливарних дворів завдяки, допомогою повороту навколо осі С. Основна відсеред іншого, великій розмаїтості робочих та стоямінність маніпуляційного пристрою 110 полягає в нкових положень, доступних для маніпуляційного тім, що рама 114 не оснащена поворотним елемепристрою. Завдяки своїй конфігураційній гнучкості нтом, замість цього перша кінцева ділянка 118 й конструкції, маніпуляційний пристрій 10, 110, 210 піднімального важеля 116 прямо приєднана до може бути змонтовано без особливих змін, або нерухомого корпуса рами 114 по осі В. Проте, мавзагалі без змін в існуючому компонуванні. Багато ніпуляційний пристрій 110 призначений для перез маніпуляційних пристроїв відомого рівня техніки міщення вилкового захвата 126 у відповідності зі мають конструкцію на зразок консольного (козлострілками 131, як видно з Фіг.6. Друга кінцева дівого) крана, що має горизонтальну стрілу, що опилянка 120 містить у собі другий гідравлічний цирається й обертається щодо вертикальної колони. ліндр 134, призначений для руху вперед/назад у Щоб такий маніпуляційний пристрій не перекинувплощині, перпендикулярній осі С і в напрямку вися, колони відомих пристроїв часто прикріплюютьсування маніпуляційного елемента 124. Як додатся у своїй верхній частині до якої-небудь міцної ково видно з Фіг.6, вилковий захват 126 і маніпуструктури, наявної на ливарному дворі. Оскільки ляційний елемент 124 улаштовані таким чином, маніпуляційний пристрій 10, 110, 210 за даним що перший висувається щодо другого за допомовинаходом є пристроєм напольного типу, він може гою прямолінійного ковзного зчленування 135. легко монтуватися в багатьох різних місцях ливарДругий гідравлічний циліндр 134 забезпечує дію ного двору поза залежністю від компонування й ковзного зчленування 135, тобто управляє переархітектури останнього. Так як маніпуляційний міщенням уперед/назад вилкового захвата 126 у пристрій 10, 110, 210 може бути встановлено на відповідності зі стрілками 131 відносно маніпулядеякій відстані від доменної печі й литтєвих жолоційного елемента 124 і піднімального важеля 116. бів, він не являє собою перешкоди й перешкоди Як буде зрозуміло фахівцям, маніпуляційний придля придладдя випуску, заглушки й іншого встатстрій 110 за тим варіантом, що зображений на кування, які необхідні поблизу випускного отвору Фіг.6, має аналогічні властивості й забезпечує по (льотки) печі або литтєвого жолобу. Крім того, масуті такі ж переваги, що й попередній описаний ніпуляційний пристрій 10, 110, 210 здатний обховаріант здійснення винаходу. дити перешкоди у вигляді газових витяжок і трубоНа Фіг.7 зображено маніпуляційний пристрій проводів, навіть при переміщенні важкої й 210 за третім варіантом здійснення винаходу. Нигроміздкої кришки жолобу. жче описані тільки відмінності від попередніх варіІншим важливим аспектом, який необхідно антів здійснення винаходу. Аналогічні або ідентичвідзначити, є придатність маніпуляційного прині деталі позначені на Фіг.7 тими ж двома строю 10, 110, 210 для автоматизації процесу, останніми цифрами, у той час як третя цифра (яка наприклад, повністю автоматичного видалення й означає сотні) збільшена на одиницю. У той час як установки двох кришок жолобів (70, 70’) до й після кожний з попередніх описаних варіантів здійснення випуску або установки заглушки в льотку доменної винаходу володіє одним лінійним ступенем рухлипечі. Дійсно, у мінімальному варіанті здійснення вості (СР) (для переміщення вперед/назад) і трьоманіпуляційний пристрій 210 являє собою спеціама обертальними (поворотними) СР, маніпуляційльно сконструйований варіант руки робота, на ний пристрій 210 володіє тільки трьома зразок робота в полярних координатах (навколо обертальними СР навколо осей А, В і С. Таким осей А і В), позбавленого СР обертання кисті й чином, маніпуляційний пристрій 210 не має ні одоснащеного захоплювальним пристроєм, що має нієї лінійної СР. Вилковий захват 226 маніпуляційодну СР (навколо осі С). У перших двох кращих ного пристрою 210 оснащений першими й другим варіантах здійснення 10, 110 до захоплювального піднімальними штирями 227 і 229, які закріплені по пристрою (тобто маніпуляційного елементу 24) суті перпендикулярно до зубців 272. Замість додана ще одна СР, тобто рух (переміщення) упетранспортних брусків кришки жолобів 270, 270' під ред/назад (по стрілках 31, 131). Відповідно, маніманіпуляційний пристрій 210 оснащені вушками пуляційний пристрій 10, 110, 210 прекрасно підхо273 з отворами під піднімальні штирі 227 і 229 мадить для автоматичного виконання операцій, які ніпуляційного пристрою 210. При такій конструкції добре відомі вмілому працівникові. Проте, не виманіпуляційний пристрій 210 здатний піднімати, ключена можливість устаткування маніпуляційного переносити й укладати кришки жолобів 270, 270’ пристрою 10, 110, 210 під ручне керування. без лінійної (уперед/назад) СР. Отже, маніпуляНарешті, хоча маніпуляційний пристрій 10, ційний пристрій 210 має меншу складність і вима110, 210 було описано в контексті переносу кришгає тільки одного гідравлічного циліндра 232, проки першого (по ходу потоку) розливного жолобу, понуючи при цьому гнучкість позиціювання, тобто основного розливного жолобу доменної печі, 15 88235 16 але не виключено, що пристрій можна використати ний, паралельний і т.д. використовуються для для переміщення інших елементів жолобу, наприопису кращих варіантів здійснення, фахівцям поклад, кришки основного нижнього (по ходу потоку) винно бути зрозуміло, що, залежно від місцевих жолобу або приладь чавунного або шлакового умов, відхилення на кілька кутових градусів (°) або жолобів. Крім того, кутові значення, наведені в навіть до 30° від такого кутового значення може кращих варіантах здійснення, можуть відрізнятися бути можливо або навіть необхідно без виходу за від значень в інших варіантах здійснення даного межі концепції маніпуляційного пристрою за даним винаходу. Таким чином, там, де такі терміни як винаходом. вертикальний, горизонтальний, перпендикуляр 17 88235 18 19 Комп’ютерна верстка В. Мацело 88235 Підписне 20 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюHandling device for elements of tapping runners
Автори англійськоюGorza Robert, Kreuz Hans-Otto, Taugerbeck Ralf
Назва патенту російськоюМанипуляционное устройство для элементов разливочных желобов
Автори російськоюГорза Роберт, Кройц Ганс-Отто, Таугербек Ральф
МПК / Мітки
Мітки: жолобів, розливних, елементів, маніпуляційний, пристрій
Код посилання
<a href="https://ua.patents.su/10-88235-manipulyacijjnijj-pristrijj-dlya-elementiv-rozlivnikh-zholobiv.html" target="_blank" rel="follow" title="База патентів України">Маніпуляційний пристрій для елементів розливних жолобів</a>
Система головних жолобів ливарного двору доменної печі
Номер патенту: 2300
Опубліковано: 15.01.2004
Автори: Івлєв Валерій Павлович, Легкий Олександр Миколайович, Павлічев Олександр Іванович, Ковтун Костянтин Володимирович, Дрейко Олексій Іванович, Байструченко Олександр Савелович, Бугаков Ігор Володимирович, Замуруєв Валерій Михайлович, Замура Сергій Михайлович
Мітки: головних, печі, система, двору, жолобів, доменної, ливарного
Формула / Реферат:
Система головних жолобів ливарного двору доменної печі, що містить два головних жолоби для приймання й транспортування з печі продуктів плавки, яка відрізняється тим, що кожен головний жолоб у напрямі випуску чавуну виконаний прямоточним, а у напрямі випуску шлаку має боковий отвір, направлений у загальну для обох жолобів і розташовану між ними сторону.
Спосіб виготовлення зношуваного шару вогнетривкої футерівки в розливних ковшах і розливних формах
Номер патенту: 86263
Опубліковано: 10.04.2009
Автор: Сейнар Слагнес
МПК: B22D 41/02
Мітки: зношуваного, розливних, ковшах, спосіб, вогнетривкої, виготовлення, формах, футерівки, шару
Формула / Реферат:
1. Спосіб виготовлення зношуваного шару (6, 9, 11) вогнетривкої футерівки в розливних ковшах і розливних формах (1), призначених для лиття металу, причому зношуваний шар (6, 9, 11) футерівки утворюють декількома шарами сипучих сумішей на основі ряду різних гранульованих вогнетривких матеріалів з низькою теплопровідністю, причому кожна із згаданих сумішей містить щонайменше 4 мас. % натрієвого або калієвого рідкого скла, який відрізняється...
Спосіб безцентрового шліфування жолобів на круглій деталі
Номер патенту: 11073
Опубліковано: 15.12.2005
Автори: Кальченко Володимир Віталійович, Осипенко Андрій Валентинович
МПК: B24B 19/02
Мітки: жолобів, круглій, шліфування, безцентрового, спосіб, деталі
Формула / Реферат:
Спосіб безцентрового шліфування жолобів на круглій деталі, згідно з яким деталі надають обертання навколо власної осі, шліфувальний круг подають на врізання в радіальному напрямку та одночасно повертають навколо його осі симетрії, яка перпендикулярна до його осі обертання, а радіус профілю шліфувального круга в осьовому перерізі менший за радіус жолоба на деталі, який відрізняється тим, що вісь повороту шліфувального круга, яка проходить...
Вогнетривка маса “nrg-белокамит-дж” для футерівки жолобів доменних печей
Номер патенту: 83754
Опубліковано: 11.08.2008
Автори: Романовський Лев Борисович, Огородній Дмитро Вікторович
МПК: C04B 33/22, C04B 35/10, C04B 14/32, C04B 35/66
Мітки: жолобів, вогнетривка, маса, футерівки, печей, доменних, nrg-белокамит-дж
Формула / Реферат:
1. Вогнетривка маса для футерівки жолобів доменних печей, яка містить у шихті високоглиноземний шамот, карбід кремнію, високоглиноземний цемент, яка відрізняється тим, що фракції компонентів шихти знаходяться в наступному співвідношенні:шамот фракції менше ніж 6,0 мм у співвідношенні до фракції більше ніж 3,0 мм і менше ніж 0,5 мм, як 1:3,5, карбід кремнію фракції менше ніж 150 мкм у співвідношенні до фракції 100-150 мкм і...
Вогнетривка маса для футерівки жолобів доменних печей
Номер патенту: 62653
Опубліковано: 15.12.2003
Автори: Белкін Олексій Іванович, Гладкий Павло Анатолійович, Бердник Володимир Петрович, Назюта Людмила Юріївна, Кравченко Петро Якович, Чалий Віктор Олексійович, Косолап Микола Володимирович
МПК: C04B 35/565, C04B 35/63
Мітки: печей, футерівки, доменних, вогнетривка, маса, жолобів
Формула / Реферат:
Вогнетривка маса для футерівки жолобів доменних печей, що містить глину вогнетривку, пек кам'яновугільний та вуглевмісний матеріал, яка відрізняється тим, що як вуглевмісний застосовано матеріал на основі відходів графітації електродного виробництва, що містить у своєму складі карбід кремнію та графіт при їх співвідношенні 1:(1,5-2,2), що введений до складу при такому співвідношенні компонентів, мас. %: глина вогнетривка ...
Попередній патент: Кристалічна потрійна сіль ортофосфату аквааміннікелю(іі)-цинку-кадмію та спосіб її одержання
Наступний патент: Подовий електрод електропечі
Випадковий патент: Накопичувач жетонів вузла подачі стріляючого пристрою ігрового автомата "російська рулетка"