Спосіб регулювання та регулятор для гідромеханічної системи
Номер патенту: 93514
Опубліковано: 25.02.2011
Автори: Шлахер Курт, Грабмаір Гернот, Кайнтцель Джордж

Формула / Реферат
1. Спосіб регулювання гідромеханічної системи, яка як об'єкт регулювання містить принаймні один гідравлічний виконавчий орган з одним степенем вільності, згідно з яким стабілізують створюване гідравлічним виконавчим органом зусилля шляхом зміни гідравлічного тиску за допомогою контуру регулювання, який відрізняється тим, що у контурі регулювання використовують заданий тиск ![]() гідравлічної системи переважно у вигляді похибки, представленої у формі терму
гідравлічної системи переважно у вигляді похибки, представленої у формі терму ![]() ), а швидкість
), а швидкість ![]() гідравлічного виконавчого органу (3) після математичної обробки використовують у контурі регулювання як сигнал демпфірування, причому задане значення тиску
гідравлічного виконавчого органу (3) після математичної обробки використовують у контурі регулювання як сигнал демпфірування, причому задане значення тиску ![]() та швидкості
та швидкості ![]() гідравлічного виконавчого органу визначають за допомогою блока спостереження, а швидкість
гідравлічного виконавчого органу визначають за допомогою блока спостереження, а швидкість ![]() гідравлічного виконавчого органу після математичної обробки додають до вихідного сигналу регулятора (R).
гідравлічного виконавчого органу після математичної обробки додають до вихідного сигналу регулятора (R).
2. Спосіб регулювання за п. 1, який відрізняється тим, що для блока спостереження використовують математичну модель об'єкта регулювання, у якій вхідну величину піддають перетворенню регулюючої величини на нову вхідну величину ![]() таким чином, щоб математична модель об'єкта регулювання була лінійною для блока спостереження.
таким чином, щоб математична модель об'єкта регулювання була лінійною для блока спостереження.
3. Спосіб регулювання за п. 1 або 2, який відрізняється тим, що механічну систему навантаження представляють як математичну модель, причому систему рівнянь представляють за допомогою методів аналітичної механіки, зокрема за допомогою формального методу Лагранжа із залученням матриці мас m(q)
![]()
![]() ,
,
де
![]() - похідна по часу від узагальнених координат,
- похідна по часу від узагальнених координат,
![]() - швидкість
- швидкість
![]() - кількість руху
- кількість руху
![]() - маса
- маса
![]() - частинна похідна по узагальнених координатах q
- частинна похідна по узагальнених координатах q
![]() - узагальнена матриця мас,
- узагальнена матриця мас,
![]() - потенціал
- потенціал
![]() - поточне положення
- поточне положення
![]() - гідравлічне зусилля
- гідравлічне зусилля
4. Спосіб регулювання за п. 3, який відрізняється тим, що у випадку несталої матриці мас для проектування блока спостереження перетворення координат та перетворення регулюючої величини (наприклад, на нову вхідну величину ![]() здійснюють таким чином, щоб матриця мас у перетворених координатах була сталою.
здійснюють таким чином, щоб матриця мас у перетворених координатах була сталою.
5. Спосіб регулювання за п. 4, який відрізняється тим, що у випадку несталої матриці мас використовують нелінійний блок спостереження, у якому перетворення координат та регулюючої величини за п. 4 формули враховують неявно.
6. Спосіб регулювання за будь-яким із пп. 1-5, який відрізняється тим, що заданий тиск ![]() визначають шляхом зворотного перетворення за допомогою параметра
визначають шляхом зворотного перетворення за допомогою параметра ![]() стану, визначеного блоком спостереження при реєстрації збурювальних чинників .
стану, визначеного блоком спостереження при реєстрації збурювальних чинників .
7. Спосіб регулювання за будь-яким із пп. 1-6, який відрізняється тим, що за допомогою блока спостереження визначають кількість руху ![]() , а за нею швидкість
, а за нею швидкість ![]() .
.
8. Спосіб регулювання за будь-яким із пп. 1-7, який відрізняється тим, що швидкість ![]() гідравлічного виконавчого органу вводять до замкнутого контуру регулювання після математичної обробки з використанням загальної функції передачі С3 (наприклад, у найпростішому випадку, пропорційний терм
гідравлічного виконавчого органу вводять до замкнутого контуру регулювання після математичної обробки з використанням загальної функції передачі С3 (наприклад, у найпростішому випадку, пропорційний терм ![]() ).
).
9. Спосіб регулювання за будь-яким із пп. 1-8, який відрізняється тим, що виміряне прискорення ![]() гідравлічного виконавчого органу вводять до замкнутого контуру регулювання після математичної обробки з використанням загальної функції передачі С4.
гідравлічного виконавчого органу вводять до замкнутого контуру регулювання після математичної обробки з використанням загальної функції передачі С4.
10. Регулятор для гідромеханічної системи, яка як об'єкт регулювання має принаймні один гідравлічний виконавчий орган з одним степенем вільності, який містить вимірювальний датчик (6) для вимірювання тиску ![]() гідравлічної системи, наприклад гідравлічного циліндра (3), і вимірювальний датчик (8) для вимірювання положення
гідравлічної системи, наприклад гідравлічного циліндра (3), і вимірювальний датчик (8) для вимірювання положення ![]() гідравлічного виконавчого органу, наприклад поршня гідравлічного циліндра (3), який відрізняється тим, що містить регулювальний блок, який має входи для сигналів датчиків гідравлічного тиску
гідравлічного виконавчого органу, наприклад поршня гідравлічного циліндра (3), який відрізняється тим, що містить регулювальний блок, який має входи для сигналів датчиків гідравлічного тиску ![]() та положення
та положення ![]() гідравлічного виконавчого органу, а також містить блок спостереження, виконаний з можливістю формування значень заданого тиску
гідравлічного виконавчого органу, а також містить блок спостереження, виконаний з можливістю формування значень заданого тиску ![]() гідравлічної системи та швидкості
гідравлічної системи та швидкості ![]() гідравлічного виконавчого органу (3), причому регулятор виконаний з можливістю використання у замкнутому контурі регулювання математично обробленого сигналу заданого тиску
гідравлічного виконавчого органу (3), причому регулятор виконаний з можливістю використання у замкнутому контурі регулювання математично обробленого сигналу заданого тиску ![]() , переважно у вигляді похибки, представленої у формі терму
, переважно у вигляді похибки, представленої у формі терму ![]() , а також з можливістю додавання до вихідного сигналу регулювального блока (R) математично обробленого сигналу швидкості vh, гідравлічного виконавчого органу як сигналу демпфірування.
, а також з можливістю додавання до вихідного сигналу регулювального блока (R) математично обробленого сигналу швидкості vh, гідравлічного виконавчого органу як сигналу демпфірування.
11. Регулятор за п. 10, який відрізняється тим, що регулюючий блок виконаний з можливістю використання у контурі регулювання виміряного прискорення ![]() гідравлічного виконавчого органу, математично обробленого у модулі реалізації загальної функції передачі (С4).
гідравлічного виконавчого органу, математично обробленого у модулі реалізації загальної функції передачі (С4).
12. Регулятор за п. 10 або 11, який відрізняється тим, що регулюючий блок виконаний з можливістю використання у замкнутому контурі регулювання швидкості ![]() гідравлічного виконавчого органу, математично обробленої у модулі реалізації загальної функції передачі (С3) .
гідравлічного виконавчого органу, математично обробленої у модулі реалізації загальної функції передачі (С3) .
13. Регулятор за будь-яким із пп. 10-12, який відрізняється тим, що виконаний з можливістю перемикання в різних напрямках між кількома режимами регулювання, у яких реалізовані різні види демпфірування.
Текст
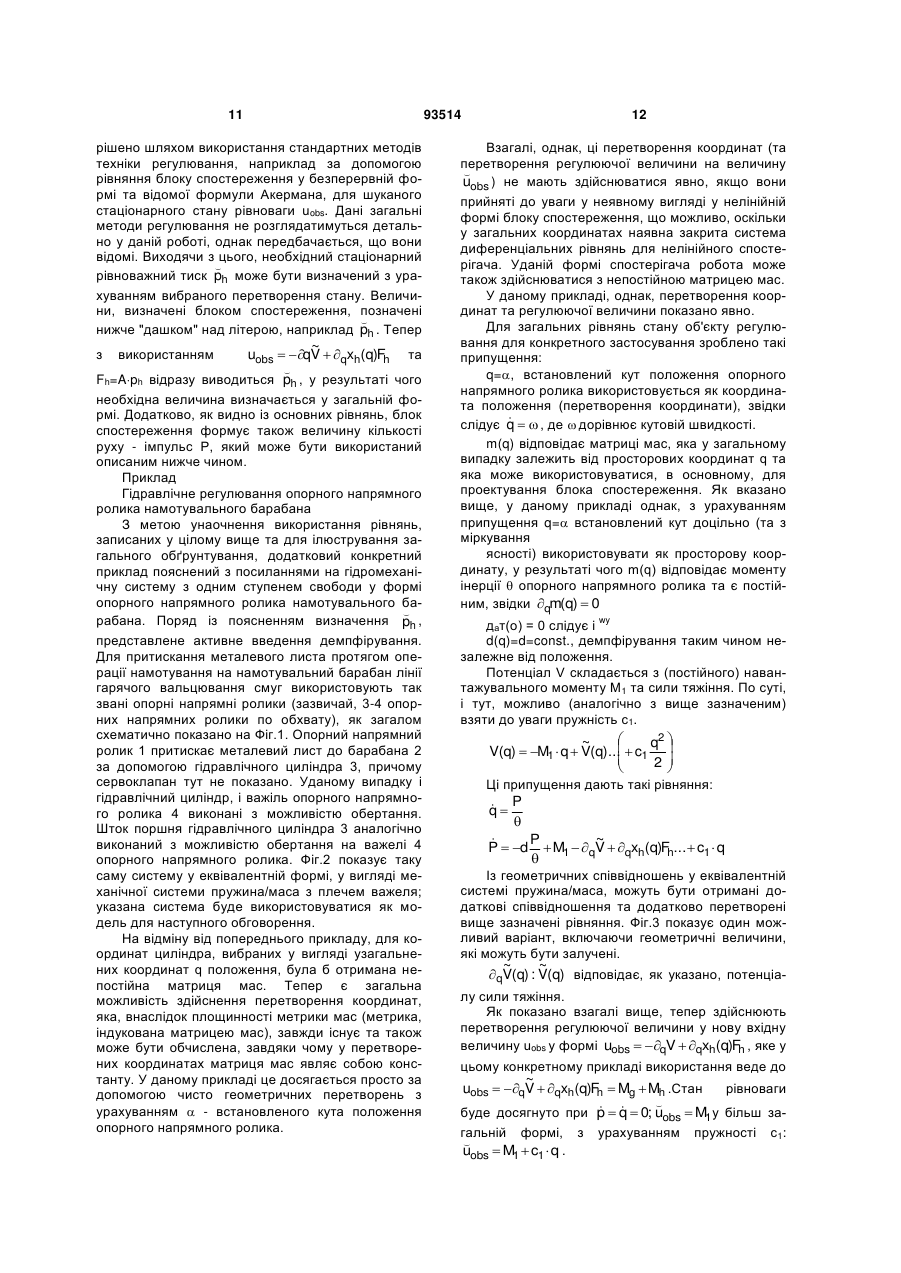
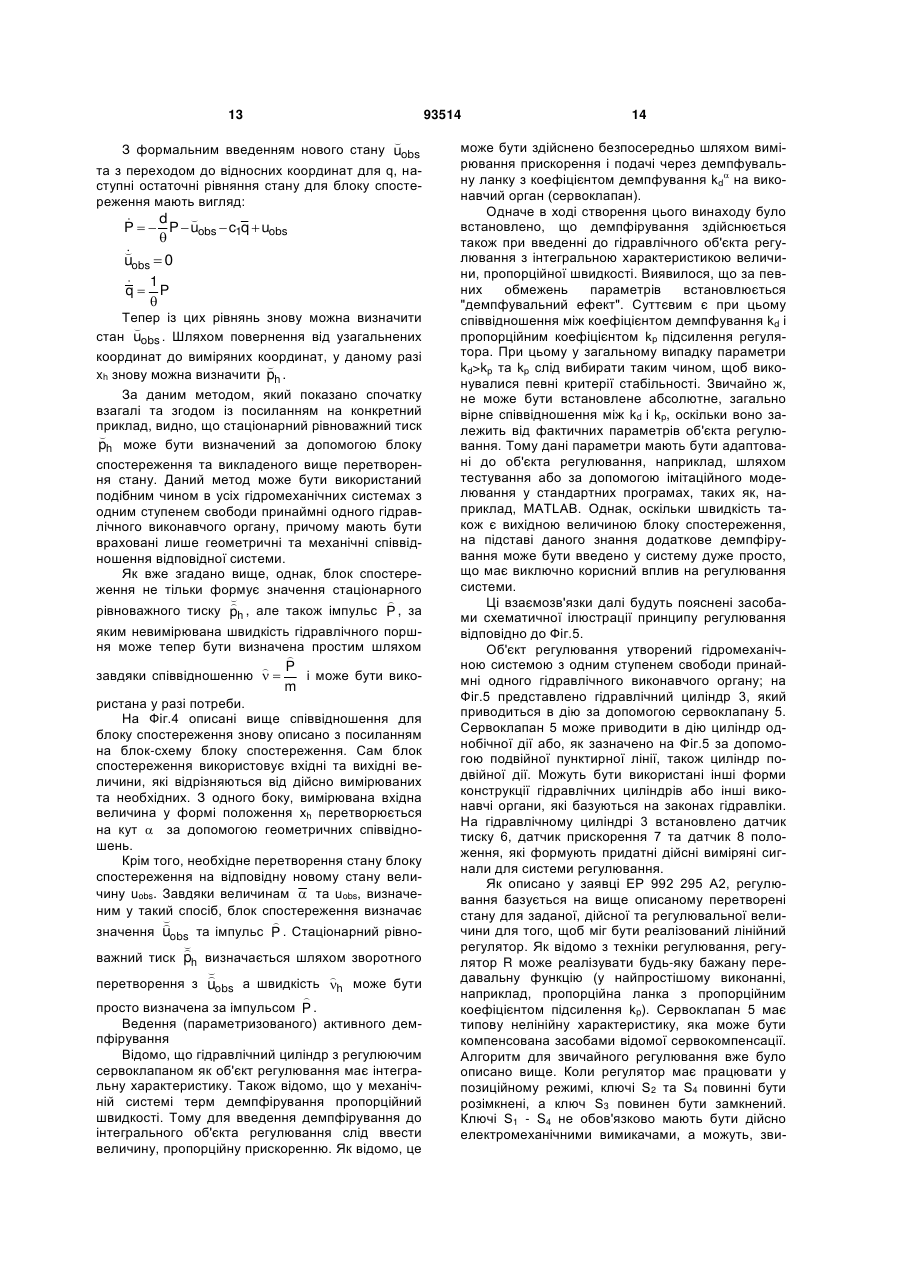
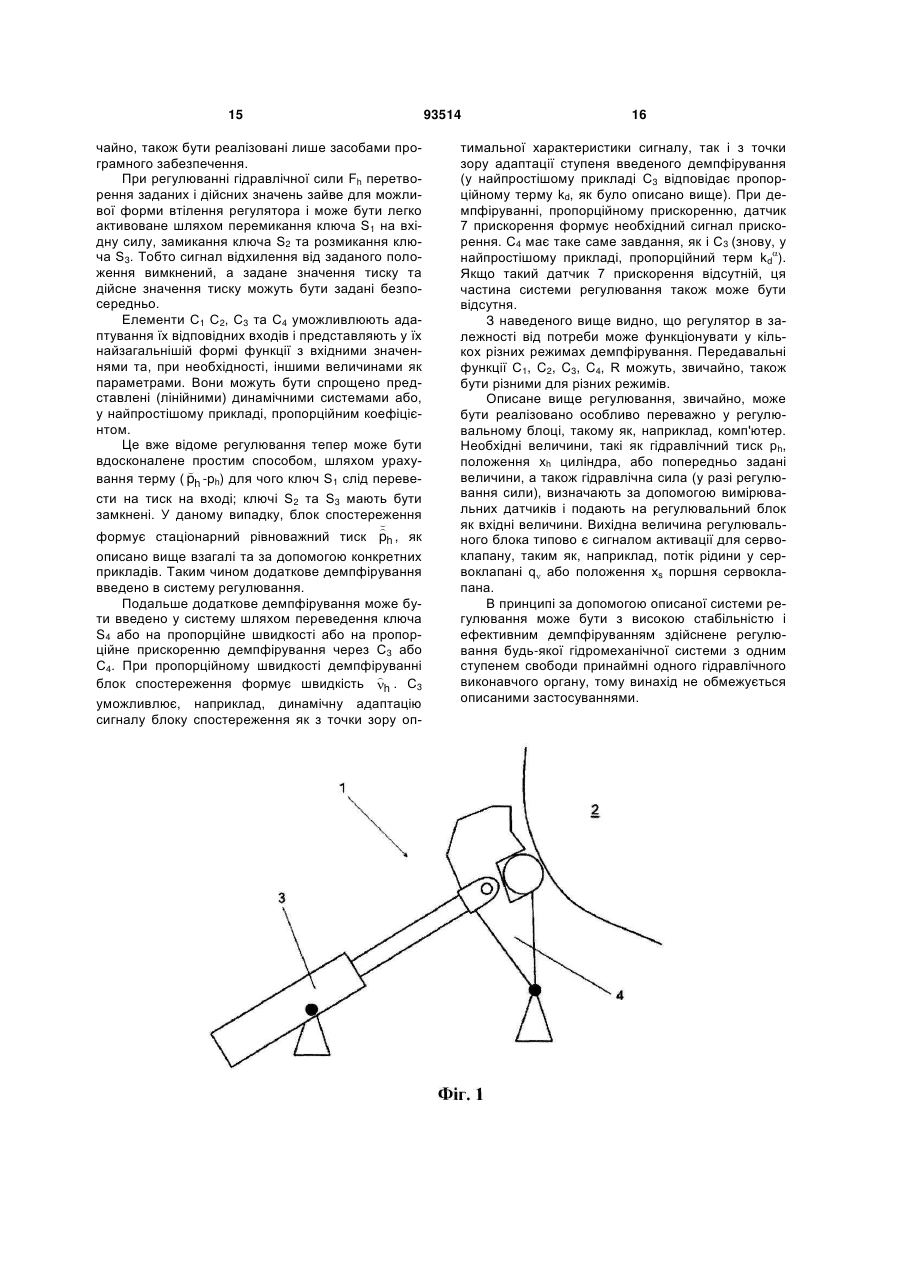
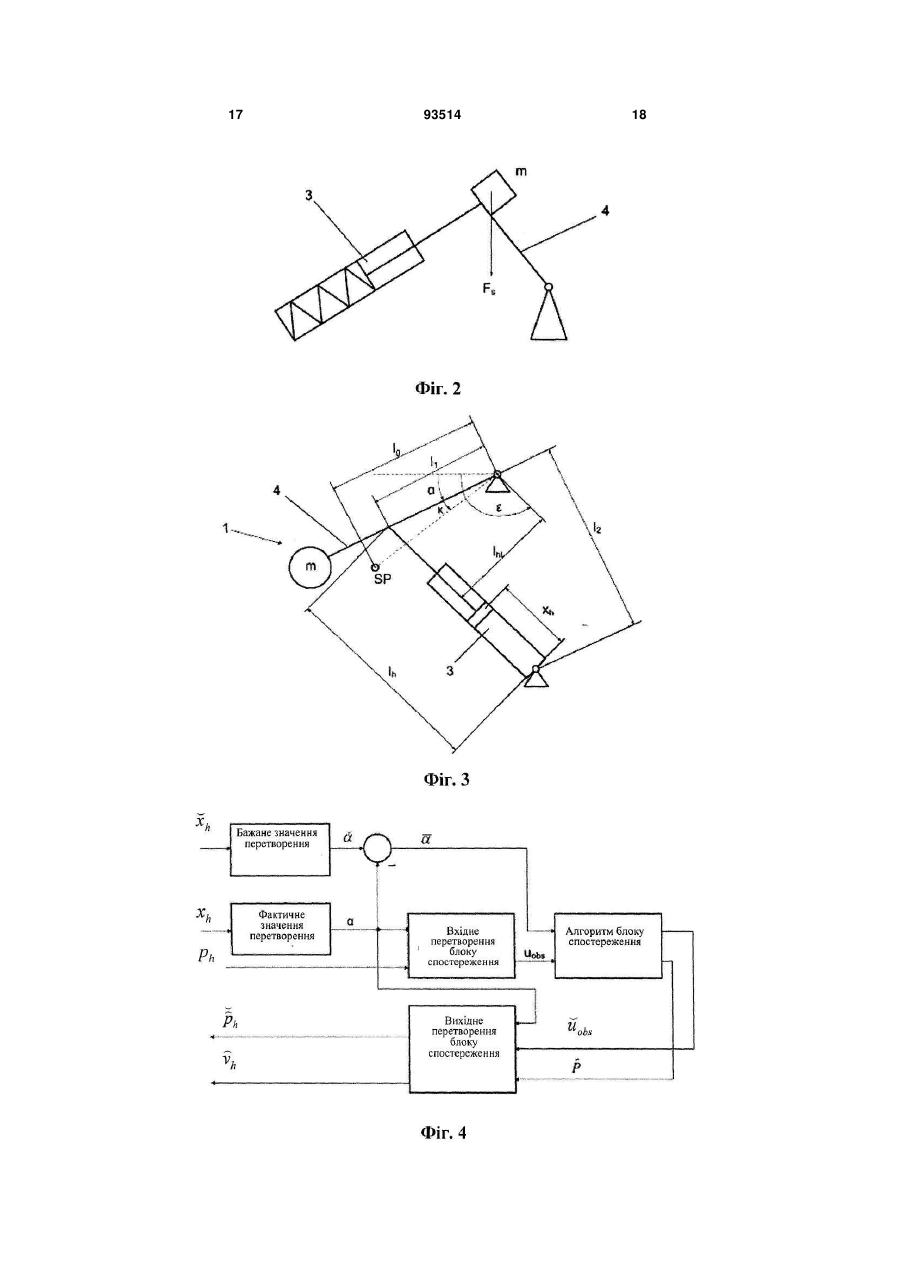
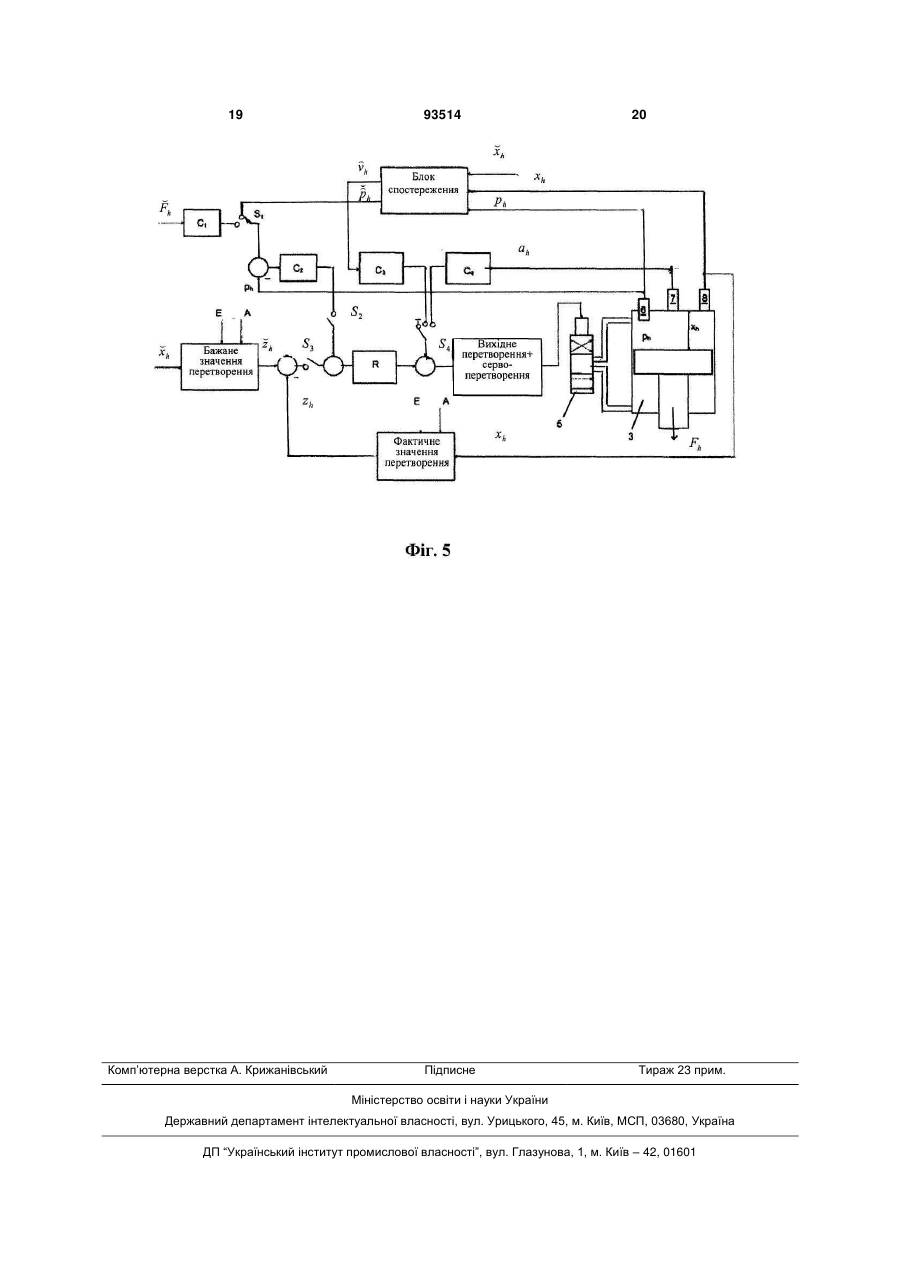
1. Спосіб регулювання гідромеханічної системи, яка як об'єкт регулювання містить принаймні один гідравлічний виконавчий орган з одним степенем вільності, згідно з яким стабілізують створюване гідравлічним виконавчим органом зусилля шляхом зміни гідравлічного тиску за допомогою контуру регулювання, який відрізняється тим, що у контурі регулювання використовують заданий тиск Ph гідравлічної системи переважно у вигляді 3 93514 стереження визначають кількість руху P , а за нею швидкість h . 8. Спосіб регулювання за будь-яким із пп. 1-7, який відрізняється тим, що швидкість h гідравлічного виконавчого органу вводять до замкнутого контуру регулювання після математичної обробки з використанням загальної функції передачі С3 (наприклад, у найпростішому випадку, пропорційний терм kd ). 9. Спосіб регулювання за будь-яким із пп. 1-8, який відрізняється тим, що виміряне прискорення h гідравлічного виконавчого органу вводять до замкнутого контуру регулювання після математичної обробки з використанням загальної функції передачі С4. 10. Регулятор для гідромеханічної системи, яка як об'єкт регулювання має принаймні один гідравлічний виконавчий орган з одним степенем вільності, який містить вимірювальний датчик (6) для вимірювання тиску Ph гідравлічної системи, наприклад гідравлічного циліндра (3), і вимірювальний датчик (8) для вимірювання положення xh гідравлічного виконавчого органу, наприклад поршня гідравлічного циліндра (3), який відрізняється тим, що містить регулювальний блок, який має входи для сигналів датчиків гідравлічного тиску Ph та положення Xh гідравлічного виконавчого органу, а також містить блок спостереження, виконаний з мо Даний винахід належить до способу регулювання гідромеханічної системи з одним ступенем свободи принаймні одного гідравлічного виконавчого органу, який функціонує як об'єкт регулювання та пристрою для здійснення даного способу. Гідромеханічна система з одним (механічним) ступенем свободи, інакше кажучи система у якій, наприклад, механічна частина з одним ступенем свободи (система навантаження) приводиться у дію через гідравлічний циліндр (виконавчий орган), яка зустрічається на практиці у багатьох різних можливих конструкціях, таких, наприклад, як опорний напрямний ролик для моталки, тримач петель між двома клітями прокатного стану або гідравлічний регулятор кліті прокатного стану, але також у загальних пристроях, таких як координатний стіл, вібростенд, і т.д. Загальним для цих систем є те, що вони схильні до коливань, в основному, за рахунок стовпа гідравлічної рідини у гідравлічному циліндрі або у інших рухомих елементах системи навантаження. Наведені системи повинні розглядатися як приклади і ніяк не обмежувати загальну значимість втілень, у яких, наприклад, гідравлічний лінійний циліндр рухає вільно обертову масу, наприклад опорний напрямний ролик, тримач петель, і т.д. В системах даного типу виражена коливальна характеристика зумовлена стовпом гідравлічної рідини, який діє так само, як пружина. Це виражається у небажаній схильності комплексної системи коли 4 жливістю формування значень заданого тиску Ph гідравлічної системи та швидкості h гідравлічного виконавчого органу (3), причому регулятор виконаний з можливістю використання у замкнутому контурі регулювання математично обробленого сигналу заданого тиску Ph , переважно у вигляді похибки, представленої у формі терму (Ph Ph ) , а також з можливістю додавання до вихідного сигналу регулювального блока (R) математично обробленого сигналу швидкості vh, гідравлічного виконавчого органу як сигналу демпфірування. 11. Регулятор за п. 10, який відрізняється тим, що регулюючий блок виконаний з можливістю використання у контурі регулювання виміряного прискорення h гідравлічного виконавчого органу, математично обробленого у модулі реалізації загальної функції передачі (С4). 12. Регулятор за п. 10 або 11, який відрізняється тим, що регулюючий блок виконаний з можливістю використання у замкнутому контурі регулювання швидкості h гідравлічного виконавчого органу, математично обробленої у модулі реалізації загальної функції передачі (С3) . 13. Регулятор за будь-яким із пп. 10-12, який відрізняється тим, що виконаний з можливістю перемикання в різних напрямках між кількома режимами регулювання, у яких реалізовані різні види демпфірування. ватися у певних точках частотної характеристики. Резонансні частоти, які виникають у даному випадку, визначаються в основному еквівалентною масою механічної системи,геометричними співвідношеннями та еквівалентною пружною жорсткістю еластичних елементів, таких як, наприклад, здатний до стискання стовп гідравлічної рідини, та/або пружна кліть прокатного стану, і т.д. Для таких систем з вираженими резонансними частотами типовою є схильність до (затухаючих) коливань при дії зовнішніх регулюючих впливів. В процесі регулювання, наприклад, при переході на нову робочу точку, або відпрацьовуванні зовнішньої перешкоди, такі коливання зумовлюють вкрай небажані неусталені зміни фізичних величин. У вищезазначеному прикладі тримача петель це призводить до коливання натягу смуги, що веде, в свою чергу, до небажаних звужень внаслідок надмірного розтягу. У разі регулювання опорних напрямних роликів ці коливання тиску опорних напрямних роликів на стрічку призводять до пошкоджень поверхні у вигляді вм'ятин. Отже, у даний час регулятори найчастіше усталюються дуже повільно з метою утримання збудження цих небажаних коливань на настільки низькому рівні, наскільки це можливо. Одна можливість, що відома з літератури, відноситься до використання так званого "фільтра-пробки", вузькосмугового режекторного фільтру, який призначений для запобігання збудження коливань регу 5 лятором шляхом цілеспрямованого "вирізання" діапазону частот навколо резонансної частоти регульованої системи. Великий недолік даного способу, особливо у вище згаданих застосуваннях, полягає у тому, що характеристика механічної системи залишається незмінною та, навіть якщо регулятор самостійно запобігає збудженню внутрішніх коливань, не відпрацьовані зовнішні перешкоди призводять, як і раніше, до коливання системи. Також резонансні частоти залежать від вибраної робочої точки. Більш великий вплив на такі системи, однак, має те, що вони є, як правило, як зазначено вище, нелінійними. Відомі способи, такі як використання фільтрів-пробок, є способами техніки регулювання лінійного процесу і у випадку нелінійних систем, є адекватними лише у діапазоні поблизу робочої точки, для якого нелінійний регульований елемент апроксимується лінійною системою. Одначе, зрозуміло на прикладі гідравлічного лінійного приводу, що зі зміною положення поршня гідравлічного виконавчого органу і відповідно рівня гідравлічної рідини, резонансна частота також змінюється. У описаному вище способі є можливість вибору фільтра-пробки дуже широкою смугою частот, який, в свою чергу, значно обмежить динаміку усієї системи. У такому випадку, задачею винаходу є удосконалення способу регулювання або регулятора, який стабілізує механічну систему з одним ступенем свободи принаймні одного гідравлічного виконавчого органу, інакше кажучи у цілому нелінійну комплексну систему, в усьому робочому діапазоні та одночасно поліпшує коливальну характеристику гідромеханічної системи та частково зменшує схильність механічної системи до коливань шляхом застосування активного демпфірування. Поставлена задача для способу регулювання вирішується за допомогою ознак за пунктом 1 та для регулятора за допомогою ознак за пунктом 10 формули винаходу. У способі регулювання гідромеханічної системи, яка як об'єкт регулювання містить принаймні один гідравлічний виконавчий орган з одним ступенем свободи, згідно з яким стабілізують створюване гідравлічним виконавчим органом зусилля шляхом зміни гідравлічного тиску за допомогою контуру регулювання, згідно з винаходом у контурі регулювання використовують за даний тиск ph гідравлічної системи переважно у формі терму ( ph -ph) а швидкість h гідравлічного виконавчого органу (3) після обробки використовують у контурі регулювання як сигнал демпфіру вання, причому задане значення тиску ph та швидкість h гідравлічного виконавчого органу визначають за допомогою блоку спостереження, а швидкість h гідравлічного виконавчого органу після обробки залучають до вихідного сигналу регулятора (R). Регулятор для гідромеханічної системи, яка як об'єкт регулювання має принаймні один гідравлічний виконавчий орган з одним ступенем свободи, який містить вимірювальний датчик (6) для вимірювання тиску ph гідравлічної системи, наприклад гідравлічного циліндра (3), і вимірювальний датчик 93514 6 (8) для вимірювання положення xh гідравлічного виконавчого органу, наприклад поршня гідравлічного циліндра (3), згідно з винаходом містить регулювальний блок, який має входи для сигналів датчиків гідравлічного тиску ph та положення xh гідравлічного виконавчого органу, а також містить блок спостереження, виконаний зі здатністю фор мування значень заданого тиску ph гідравлічної системи та швидкості h гідравлічного виконавчого органу (3), причому регулятор виконаний зі здатністю залучення до замкнутого контуру регулювання математично обробленого сигналу заданого тиску ph , переважно у формі терму ( ph -ph), а також зі здатністю залучення до вихідного сигналу регулювального блока (R) математично обробленого сигналу швидкості h гідравлічного виконавчого органу як сигналу демпфірування. Отже немає необхідності безпосереднього ви мірювання значень ph або h, але коли вони є, вони, звичайно, можуть бути використані. У винаході або лише заданий тиск ph гідравлічної системи, або лише швидкість h гідравлічного виконавчого органу, або обидві величини можуть впливати на регулювання. Даний спосіб регулювання або даний регулятор стабілізує комплексну гідромеханічну систему з одним ступенем свободи, незалежно від вибору регульованої величини, такої як, наприклад, положення або тиск (або регулююча сила). На додаток, вони здатні ефективно демпфірувати систему, тому що вони належним чином відбирають енергію зі здатної до коливань системи. Вони таким чином активно зменшують схильність регульованої системи до коливання або, в ідеалі, в значній мірі гасять коливання системи. Спосіб регулювання надає можливості введення в систему активного демпфірування у різному виконанні, у результаті чого ефективне демпфірування системи може бути також виконано гнучко. Спосіб регулювання відрізняється, більш того, винятковою стійкістю до небажаних впливів. Навіть у випадку відхилення у фізичних параметрах, таких як, наприклад, стисливість стовпа гідравлічної рідини та у разі виникнення витоку у гідравлічному виконавчому органі, регулятор здатний стабілізувати комплексну систему (систему навантаження плюс гідравліку) надійно у повному діапазоні, який обмежений лише механічною конструкцією. Отже, небажані зміни регульованих величин, таких як, наприклад, натяг стрічки або тиск на стрічку прокатного стану, що, в свою чергу, відбивається у втратах якості, ефективно зменшуються або виключаються. Додатково контур регулювання, оптимізований шляхом введення активного демпфірування, усталюється (досягає сталого стану після дії збурювальних впливів) набагато швидше, що, в свою чергу, може внести поліпшення якості або підвищення випуску продукції, оскільки, з одного боку, збурення можуть бути відпрацьовані більш швидко і таким чином більш ефективно та, з іншого боку, задані значення будуть досягнуті більш швидко. 7 Додаткові надзвичайно корисні покращення можуть бути отримані з незалежних пунктів формули винаходу та з даного опису винаходу. Даний винахід описаний нижче спочатку для загальної гідромеханічної системи з одним ступенем свободи принаймні одного гідравлічного виконавчого органу, а потім, із посиланням на два особливі варіанти застосування, які є прикладами та не обмежують винахід, за допомогою фігур 1-5, які є прикладами і не обмежують винахід; на них схематично представлені: Фіг.1 Спрощене зображення опорного напрямного ролика; Фіг.2 Еквівалентна схема опорного напрямного ролика як система пружина / маса; Фіг.3 Геометричні співвідношення в опорному напрямному ролику; Фіг.4 Блок-схема блоку спостереження, та Фіг.5 Блок-схема контуру регулювання. Загальне представлення У загальному вигляді гідромеханічна система з одним ступенем свободи може бути розглянута, з точки зору моделювання, як скомпонована із нелінійної системи механічного навантаження (наприклад, опорний ролик, рука робота, демпферна система пружина/маса, і так далі, але, наприклад, також лише маса циліндра самого виконавчого органу) та найчастіше нелінійної виконавчої системи (створення тиску або тисків), яка приводиться в дію через один або кілька гідравлічних клапанів. Для надання комплексній системі бажаної регулювальної характеристики попередньо відповідним чином задають кількість гідравлічної рідини, що перебуває у виконавчому органі, і подають через один чи кілька гідроклапанів. При цьому відповідним чином враховують еластичний характер гідравлічної рідини. Якщо фізичні умови системи навантаження, а отже і значення заданого тиску ph не відомі досить точно, і наприклад діє невідома зовнішня узагальнена сила, неможливо попередньо безпосередньо передбачити кількість рідини. Виходячи з цього, для визначення кількості рідини, яка необхідна для досягнення бажаного стану системи навантаження, розроблено блок спостереження. Цей у загальному випадку нелінійний блок спостереження може бути навіть виконаний без вимірювання узагальненої швидкості системи навантаження, без погіршення його функцій. Регулятор сам, таким чином, використовує відому інформацію, або отриману від блоку спостереження інформацію стосовно необхідної кількості рідини, з метою усталення бажаного стану комплексної системи. Якщо механічне демпфірування системи навантаження недостатнє або має бути належним чином попередньо задане, це може бути поєднано описаним вище способом. З цією метою до регулюючого сигналу згаданого вище регулятора або частини регулятора належним чином додають сигнал, залежний від узагальненої швидкості системи навантаження. Цей вплив демпфірування може також бути здійснений шляхом апроксимації узагальненої швидкості, виконаної у вказаному вище або в іншому придатному блоці спостереження. 93514 8 Для усіх наведених варіантів регулювання є надійний доказ стабільності регульованої системи. Коригувальний терм для урахування заданого тиску ph Основне рівняння гідравлічного циліндра однобічної дії (singl acting), що приводиться в дію одним сервоклапаном, достатньо відоме і з урахуванням певних фізичних припущень має вигляд: xh h E hA qv C1ph ph Vact Де ph - тиск у активованій сервоклапаном камері циліндра; A - площа поршня; h - швидкість поршня; qv - потік від сервоклапану у гідравлічний циліндр; C1 - витік у гідравлічному циліндрі; Е - модуль пружності гідравлічної рідини; Vact - об’єм гідравлічної рідини у регульованій камері. Вказане рівняння може також відноситись до інших варіантів гідравлічних виконавчих органів (таких як, наприклад, циліндрів двобічної дії), також достатньо відомих з літератури. З метою ілюстрування винаходу, однак, буде достатньо описати його лише на прикладі циліндра однобічної дії. Отже, як очевидно з вище наведеного рівняння, зміни тиску відбуваються від змін об'єму через переміщення поршня, змін у стисканні гідравлічної рідини внаслідок її подачі (при сталому положенні поршня) та можливих витоків у циліндрі. Зміна як така залежить від поточного об'єму камери або від позиції поршня. Як можна легко побачити, вище наведене основне рівняння є нелінійним. Крім того, дане рівняння містить швидкість поршня яка, на відміну від позиції поршня, як правило, безпосередньо не вимірюється або не може бути виміряна. На додаток, диференціювання виміряного положення поршня внаслідок шумів квантування та вимірювання перешкод не дає практично придатного результату. Тому у типових застосуваннях як придатні для лінеаризації безпосередні і прийнятні виміряні значення використовують дійсне положення поршня і дійсний тиск регульованої гідравлічної камери. Шляхом використання нелінійних методів техніки регулювання, які відомі з літератури, може бути здійснена точна лінеаризація на основі цього обмеженого набору виміряних даних. В такому алгоритмі регулювання, таким чином, може виникати відносна похибка гідравлічного тиску регу льованої камери відносно заданого тиску ( ph -ph) (причому цей заданий тиск визначається попередньо заданим положенням та системою навантаження). Дані методи та такий алгоритм регулювання детально описані у наступних публікаціях. G. Grabmair, K. Schlacher, A. Kugi (2003): "Geometric Energy Based Analysis and Controlled Design of Hydraulic Actuators Applied in Rolling 9 Mills", ECC03 CD publication, 421.pdf, Cambridge, Great Brirain. Kugi A.: "Nonlinear Control based on Physical Models", Lecture Notes in Control and Information Sciences 260, Springer, 2000. Крім того, це також описано заявниками у публікації ЕР992295А2, що є частиною даного опису. При здійсненні гідравлічного регулювання методом позиційного регулювання задане значення тиску зазвичай апріорі не відоме (оскільки воно має, наприклад, значну залежність від зовнішніх діючих сил, які не відомі апріорі, або від пружності, точне числове значення якої невідоме). Якщо цей заданий тиск ph , невідомий, то терм ( ph -ph) повинен ігноруватися. Одначе, дослідження, проведені заявником за допомогою моделювання та теоретичних міркувань, показали, що таке ігнорування має дестабілізуючу дію. Навпаки, при врахуванні цього терму замкнений контур регулювання має кращу характеристику демпфірування, завдяки чому регулятор може швидше досягати усталеного стану. Це також може бути видно з аналізу енергетичних співвідношень комплексної системи, де механічне демпфірування погіршується без цього терму. Опис винаходу, наведений нижче, таким чи ном, показує шляхи визначення змінної ph . Для цієї мети, по-перше, математична модель (або опис стану) об'єкту регулювання, інакше кажучи гідромеханічної системи з одним ступенем свободи, прийнята у загальному вигляді. Така загальна модель може бути отримана, наприклад, з достатньо відомого формального методу Лагранжа, який регулярно використовують в техніці регулювання, інакше кажучи через терми енергії. Відома функція L Лагранжа для гідромеханічної системи з одним ступенем свободи може бути записана як різниця кінетичної та потенціальної ене 1 m(q)(q)2 v(q) . Де m(q) - узагальнена 2 матриця маси, q - узагальнені координати, q ргії, L похідна по часу від узагальнених координат, а V(q) - потенціал. З використанням гідравлічної сили Fh як вхідної величини отримано загальне рівняння стану об'єкту регулювання, з узагальненими координатами q та кількістю руху (імпульсом) Р як величинами стану, які становлять основу для усіх пристроїв гідромеханічних систем з одним ступенем свободи принаймні одного гідравлічного виконавчого органу. P q m 1 m(q)2 V d(q) x (q)F P q q q h h 2 Умовне позначення q у цьому випадку означає частинну похідну по узагальнених координатах q. Це загальне пояснення рівняння стану гідромеханічної системи з одним ступенем свободи має бути адаптовано належним чином для відповідного пристрою, інакше кажучи слід зробити деякі припущення, які мають бути адаптовані для різних 93514 10 застосувань. Наступний приклад призначений, без будь-якого обмеження загального принципу, для опису такої адаптації та для пояснення алгоритму визначення ph . Приклад Гідравлічне (однобічної дії) регулювання кліті прокатного стану: Нижче описана гідравлічна система, відмінна від лінійної системи пружина/маса. Тому прийнято такі припущення: Маса та демпфірування не залежать від положення. Загальний потенціал V(q) може бути явно розділений на потенціал пружності c1 q2 потенціал 2 сили постійно діючого навантаження F1q та сформульований тут ще у загальному вигляді залишко ~ вий терм V . З цього витікає загальне рівняння стану для об'єкту регулювання, а саме: P q m P ~ P F d c1q qV qxh(q)Fh 1 m Дане рівняння стану є тепер основою для мо жливості визначення заданого тиску ph за допомогою блоку спостереження. З цією метою було застосовано перетворення стану, для того, щоб модель блоку спостереження стала лінійною, щоб стало можливим лінійне конструктивне виконання блоку спостерігача. Як результат перетворення стану, складові частини, отримані із сили тяжіння та гідравлічної сили, об'єднанні у нову вхідну ве ~ личину uobs, uobs qV qxh(q)Fh . Отже, тепер, як описано нижче, блок спостереження може бути спроектовано для стаціонарного стану рівноваги величини uobs. Для стану рівноваги, звичайно, має бути дійсною умова p q 0 . Перехід від q до різниці q (для q q q .) дає консистентний набір рівнянь стану. Формально може бути записане ще й третє рівняння стану для величини uobs. d P P uobs c1q uobs m u 0 obs 1 q P m Таким чином може бути явно залучена у блок спостереження (який, звичайно, може бути сформульований довільним чином) сі як константа пружності системи навантаження (наприклад, пружність матеріалу). Отже, блок спостереження стає стійким до коливань/неточностей, наприклад пружності матеріалу. Сила навантаження приймається тут сталою, для того, щоб міг бути спроектований лінійний блок спостереження. Одночасно досягають "інтегральної дії" блоку спостереження, який сприяє наближенню похибки до нуля. Тепер дане рівняння стану блоку спостереження з перетвореним станом uobs може бути ви 11 рішено шляхом використання стандартних методів техніки регулювання, наприклад за допомогою рівняння блоку спостереження у безперервній формі та відомої формули Акермана, для шуканого стаціонарного стану рівноваги uobs. Дані загальні методи регулювання не розглядатимуться детально у даній роботі, однак передбачається, що вони відомі. Виходячи з цього, необхідний стаціонарний рівноважний тиск ph може бути визначений з урахуванням вибраного перетворення стану. Величини, визначені блоком спостереження, позначені нижче "дашком" над літерою, наприклад ph . Тепер ~ uobs qV qxh(q)Fh та Fh=Aph відразу виводиться ph , у результаті чого з використанням необхідна величина визначається у загальній формі. Додатково, як видно із основних рівнянь, блок спостереження формує також величину кількості руху - імпульс Р, який може бути використаний описаним нижче чином. Приклад Гідравлічне регулювання опорного напрямного ролика намотувального барабана З метою унаочнення використання рівнянь, записаних у цілому вище та для ілюстрування загального обґрунтування, додатковий конкретний приклад пояснений з посиланнями на гідромеханічну систему з одним ступенем свободи у формі опорного напрямного ролика намотувального ба рабана. Поряд із поясненням визначення ph , представлене активне введення демпфірування. Для притискання металевого листа протягом операції намотування на намотувальний барабан лінії гарячого вальцювання смуг використовують так звані опорні напрямні ролики (зазвичай, 3-4 опорних напрямних ролики по обхвату), як загалом схематично показано на Фіг.1. Опорний напрямний ролик 1 притискає металевий лист до барабана 2 за допомогою гідравлічного циліндра 3, причому сервоклапан тут не показано. Уданому випадку і гідравлічний циліндр, і важіль опорного напрямного ролика 4 виконані з можливістю обертання. Шток поршня гідравлічного циліндра 3 аналогічно виконаний з можливістю обертання на важелі 4 опорного напрямного ролика. Фіг.2 показує таку саму систему у еквівалентній формі, у вигляді механічної системи пружина/маса з плечем важеля; указана система буде використовуватися як модель для наступного обговорення. На відміну від попереднього прикладу, для координат циліндра, вибраних у вигляді узагальнених координат q положення, була б отримана непостійна матриця мас. Тепер є загальна можливість здійснення перетворення координат, яка, внаслідок площинності метрики мас (метрика, індукована матрицею мас), завжди існує та також може бути обчислена, завдяки чому у перетворених координатах матриця мас являє собою константу. У даному прикладі це досягається просто за допомогою чисто геометричних перетворень з урахуванням - встановленого кута положення опорного напрямного ролика. 93514 12 Взагалі, однак, ці перетворення координат (та перетворення регулюючої величини на величину uobs ) не мають здійснюватися явно, якщо вони прийняті до уваги у неявному вигляді у нелінійній формі блоку спостереження, що можливо, оскільки у загальних координатах наявна закрита система диференціальних рівнянь для нелінійного спостерігача. Уданій формі спостерігача робота може також здійснюватися з непостійною матрицею мас. У даному прикладі, однак, перетворення координат та регулюючої величини показано явно. Для загальних рівнянь стану об'єкту регулювання для конкретного застосування зроблено такі припущення: q=, встановлений кут положення опорного напрямного ролика використовується як координата положення (перетворення координати), звідки слідує q , де дорівнює кутовій швидкості. m(q) відповідає матриці мас, яка у загальному випадку залежить від просторових координат q та яка може використовуватися, в основному, для проектування блока спостереження. Як вказано вище, у даному прикладі однак, з урахуванням припущення q= встановлений кут доцільно (та з міркування ясності) використовувати як просторову координату, у результаті чого m(q) відповідає моменту інерції опорного напрямного ролика та є постійним, звідки qm(q) 0 дат(о) = 0 слідує і wy d(q)=d=const., демпфірування таким чином незалежне від положення. Потенціал V складається з (постійного) навантажувального моменту M1 та сили тяжіння. По суті, і тут, можливо (аналогічно з вище зазначеним) взяти до уваги пружність c1. q2 ~ V(q) M1 q V(q)... c1 2 Ці припущення дають такі рівняння: P q P ~ P d M1 qV qxh(q)Fh... c1 q Із геометричних співвідношень у еквівалентній системі пружина/маса, можуть бути отримані додаткові співвідношення та додатково перетворені вище зазначені рівняння. Фіг.3 показує один можливий варіант, включаючи геометричні величини, які можуть бути залучені. ~ ~ qV(q) : V(q) відповідає, як указано, потенціа лу сили тяжіння. Як показано взагалі вище, тепер здійснюють перетворення регулюючої величини у нову вхідну величину uobs у формі uobs qV qxh(q)F , яке у h цьому конкретному прикладі використання веде до ~ uobs qV qxh(q)Fh Mg Mh .Стан рівноваги буде досягнуто при p q 0; uobs M у більш за1 гальній формі, uobs M1 c1 q . з урахуванням пружності с 1: 13 93514 З формальним введенням нового стану uobs та з переходом до відносних координат для q, наступні остаточні рівняння стану для блоку спостереження мають вигляд: d P P uobs c1q uobs u 0 obs 1 q P Тепер із цих рівнянь знову можна визначити стан uobs . Шляхом повернення від узагальнених координат до виміряних координат, у даному разі xh знову можна визначити ph . За даним методом, який показано спочатку взагалі та згодом із посиланням на конкретний приклад, видно, що стаціонарний рівноважний тиск ph може бути визначений за допомогою блоку спостереження та викладеного вище перетворення стану. Даний метод може бути використаний подібним чином в усіх гідромеханічних системах з одним ступенем свободи принаймні одного гідравлічного виконавчого органу, причому мають бути враховані лише геометричні та механічні співвідношення відповідної системи. Як вже згадано вище, однак, блок спостереження не тільки формує значення стаціонарного рівноважного тиску ph , але також імпульс P , за яким невимірювана швидкість гідравлічного поршня може тепер бути визначена простим шляхом завдяки співвідношенню P і може бути викоm ристана у разі потреби. На Фіг.4 описані вище співвідношення для блоку спостереження знову описано з посиланням на блок-схему блоку спостереження. Сам блок спостереження використовує вхідні та вихідні величини, які відрізняються від дійсно вимірюваних та необхідних. З одного боку, вимірювана вхідна величина у формі положення xh перетворюється на кут за допомогою геометричних співвідношень. Крім того, необхідне перетворення стану блоку спостереження на відповідну новому стану величину uobs. Завдяки величинам та uobs, визначеним у такий спосіб, блок спостереження визначає значення uobs та імпульс P . Стаціонарний рівно важний тиск ph визначається шляхом зворотного перетворення з uobs а швидкість h може бути просто визначена за імпульсом P . Ведення (параметризованого) активного демпфірування Відомо, що гідравлічний циліндр з регулюючим сервоклапаном як об'єкт регулювання має інтегральну характеристику. Також відомо, що у механічній системі терм демпфірування пропорційний швидкості. Тому для введення демпфірування до інтегрального об'єкта регулювання слід ввести величину, пропорційну прискоренню. Як відомо, це 14 може бути здійснено безпосередньо шляхом вимірювання прискорення і подачі через демпфувальну ланку з коефіцієнтом демпфування kd на виконавчий орган (сервоклапан). Одначе в ході створення цього винаходу було встановлено, що демпфірування здійснюється також при введенні до гідравлічного об'єкта регулювання з інтегральною характеристикою величини, пропорційної швидкості. Виявилося, що за певних обмежень параметрів встановлюється "демпфувальний ефект". Суттєвим є при цьому співвідношення між коефіцієнтом демпфування kd і пропорційним коефіцієнтом kp підсилення регулятора. При цьому у загальному випадку параметри kd>kp та kp слід вибирати таким чином, щоб виконувалися певні критерії стабільності. Звичайно ж, не може бути встановлене абсолютне, загально вірне співвідношення між kd і kp, оскільки воно залежить від фактичних параметрів об'єкта регулювання. Тому дані параметри мають бути адаптовані до об'єкта регулювання, наприклад, шляхом тестування або за допомогою імітаційного моделювання у стандартних програмах, таких як, наприклад, MATLAB. Однак, оскільки швидкість також є вихідною величиною блоку спостереження, на підставі даного знання додаткове демпфірування може бути введено у систему дуже просто, що має виключно корисний вплив на регулювання системи. Ці взаємозв'язки далі будуть пояснені засобами схематичної ілюстрації принципу регулювання відповідно до Фіг.5. Об'єкт регулювання утворений гідромеханічною системою з одним ступенем свободи принаймні одного гідравлічного виконавчого органу; на Фіг.5 представлено гідравлічний циліндр 3, який приводиться в дію за допомогою сервоклапану 5. Сервоклапан 5 може приводити в дію циліндр однобічної дії або, як зазначено на Фіг.5 за допомогою подвійної пунктирної лінії, також циліндр подвійної дії. Можуть бути використані інші форми конструкції гідравлічних циліндрів або інші виконавчі органи, які базуються на законах гідравліки. На гідравлічному циліндрі 3 встановлено датчик тиску 6, датчик прискорення 7 та датчик 8 положення, які формують придатні дійсні виміряні сигнали для системи регулювання. Як описано у заявці ЕР 992 295 А2, регулювання базується на вище описаному перетворені стану для заданої, дійсної та регулювальної величини для того, щоб міг бути реалізований лінійний регулятор. Як відомо з техніки регулювання, регулятор R може реалізувати будь-яку бажану передавальну функцію (у найпростішому виконанні, наприклад, пропорційна ланка з пропорційним коефіцієнтом підсилення kp). Сервоклапан 5 має типову нелінійну характеристику, яка може бути компенсована засобами відомої сервокомпенсації. Алгоритм для звичайного регулювання вже було описано вище. Коли регулятор має працювати у позиційному режимі, ключі S2 та S4 повинні бути розімкнені, а ключ S3 повинен бути замкнений. Ключі S1 - S4 не обов'язково мають бути дійсно електромеханічними вимикачами, а можуть, зви 15 93514 чайно, також бути реалізовані лише засобами програмного забезпечення. При регулюванні гідравлічної сили Fh перетворення заданих і дійсних значень зайве для можливої форми втілення регулятора і може бути легко активоване шляхом перемикання ключа S1 на вхідну силу, замикання ключа S2 та розмикання ключа S3. Тобто сигнал відхилення від заданого положення вимкнений, а задане значення тиску та дійсне значення тиску можуть бути задані безпосередньо. Елементи С1 С2, С3 та С4 уможливлюють адаптування їх відповідних входів і представляють у їх найзагальнішій формі функції з вхідними значеннями та, при необхідності, іншими величинами як параметрами. Вони можуть бути спрощено представлені (лінійними) динамічними системами або, у найпростішому прикладі, пропорційним коефіцієнтом. Це вже відоме регулювання тепер може бути вдосконалене простим способом, шляхом ураху вання терму ( ph -ph) для чого ключ S1 слід перевести на тиск на вході; ключі S2 та S3 мають бути замкнені. У даному випадку, блок спостереження формує стаціонарний рівноважний тиск ph , як описано вище взагалі та за допомогою конкретних прикладів. Таким чином додаткове демпфірування введено в систему регулювання. Подальше додаткове демпфірування може бути введено у систему шляхом переведення ключа S4 або на пропорційне швидкості або на пропорційне прискоренню демпфірування через С3 або С4. При пропорційному швидкості демпфіруванні блок спостереження формує швидкість h . С3 уможливлює, наприклад, динамічну адаптацію сигналу блоку спостереження як з точки зору оп 16 тимальної характеристики сигналу, так і з точки зору адаптації ступеня введеного демпфірування (у найпростішому прикладі С3 відповідає пропорційному терму kd, як було описано вище). При демпфіруванні, пропорційному прискоренню, датчик 7 прискорення формує необхідний сигнал прискорення. С4 має таке саме завдання, як і С3 (знову, у найпростішому прикладі, пропорційний терм kd). Якщо такий датчик 7 прискорення відсутній, ця частина системи регулювання також може бути відсутня. З наведеного вище видно, що регулятор в залежності від потреби може функціонувати у кількох різних режимах демпфірування. Передавальні функції C1, C2, C3, C4, R можуть, звичайно, також бути різними для різних режимів. Описане вище регулювання, звичайно, може бути реалізовано особливо переважно у регулювальному блоці, такому як, наприклад, комп'ютер. Необхідні величини, такі як гідравлічний тиск ph, положення xh циліндра, або попередньо задані величини, а також гідравлічна сила (у разі регулювання сили), визначають за допомогою вимірювальних датчиків і подають на регулювальний блок як вхідні величини. Вихідна величина регулювального блока типово є сигналом активації для сервоклапану, таким як, наприклад, потік рідини у сервоклапані q або положення xs поршня сервоклапана. В принципі за допомогою описаної системи регулювання може бути з високою стабільністю і ефективним демпфіруванням здійснене регулювання будь-якої гідромеханічної системи з одним ступенем свободи принаймні одного гідравлічного виконавчого органу, тому винахід не обмежується описаними застосуваннями. 17 93514 18 19 Комп’ютерна верстка А. Крижанівський 93514 Підписне 20 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl method and control device for hydromechanical system
Автори англійськоюGrabmair Gernot, Keintzel George, Schlacher Kurt
Назва патенту російськоюСпособ регулирования и регулятор для гидромеханической системы
Автори російськоюГрабмаир Гернот, Кайнтцель Джордж, Шлахер Курт
МПК / Мітки
МПК: G05B 13/04, F15B 9/09
Мітки: регулятор, гідромеханічної, системі, спосіб, регулювання
Код посилання
<a href="https://ua.patents.su/10-93514-sposib-regulyuvannya-ta-regulyator-dlya-gidromekhanichno-sistemi.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання та регулятор для гідромеханічної системи</a>
Гідравлічний регулятор стоку дренажно-модульної системи
Номер патенту: 46436
Опубліковано: 25.12.2009
Автори: Ткачук Руслан Миколайович, Ткачук Микола Микитович, Кухнюк Наталія Василівна
МПК: E02B 11/00
Мітки: гідравлічний, стоку, регулятор, системі, дренажно-модульної
Формула / Реферат:
1. Гідравлічний регулятор стоку дренажно-модульної системи, який має чутливий елемент у вигляді поплавка, що є приводом запірного органу, та містить напрямну у вигляді трубчастого штока, який закріплюється на колекторі, який відрізняється тим, що запірний орган складається з двох робочих заслінок, які рухомо (шарнірно) закріплені на верхній частині водовипускної труби, розміщені під кутом до дрени та зв'язані гнучкими стрічками з траверсою,...
Спосіб регулювання режиму роботи електроенергетичної системи
Номер патенту: 29420
Опубліковано: 10.01.2008
Автори: Рубаненко Олена Олександрівна, Лежнюк Петро Дем'янович
МПК: H02J 3/24
Мітки: системі, режиму, роботи, регулювання, спосіб, електроенергетичної
Формула / Реферат:
Спосіб регулювання режиму роботи електроенергетичної системи, який включає вимірювання величини напруги в контрольованих вузлах електричної мережі, вимірювання струмів в перерізах та частоти в системі, визначення чутливості параметрів режиму роботи системи до зміни вузлових потужностей формування сигналу, пропорційного до економічного збитку від роботи системи до зміни вузлових потужностей, додавання його з сигналом, пропорційним до збитків...
Спосіб регулювання режиму роботи електроенергетичної системи

Номер патенту: 51198
Опубліковано: 12.07.2010
Автори: Лежнюк Петро Дем'янович, Рубаненко Олена Олександрівна
МПК: H02J 3/24
Мітки: спосіб, електроенергетичної, регулювання, режиму, системі, роботи
Формула / Реферат:
Спосіб регулювання режиму роботи електроенергетичної системи, який включає вимірювання величини напруги в контрольованих вузлах електричної мережі, вимірювання струмів в перерізах та частоти в системі, визначення чутливості параметрів режиму роботи системи до зміни вузлових потужностей формування сигналу, пропорційного до економічного збитку від роботи системи до зміни вузлових потужностей, додавання його з сигналом, пропорційним до збитків...
Спосіб регулювання роботи системи вентиляції піддахового простору
Номер патенту: 39349
Опубліковано: 25.02.2009
Автори: Жван Віктор Денисович, Семеніхіна Вікторія Петрівна
МПК: E04D 11/00, E04B 7/00
Мітки: системі, роботи, вентиляції, піддахового, простору, спосіб, регулювання
Формула / Реферат:
Спосіб регулювання роботи системи вентиляції піддахового простору похилого даху суміщеного типу, що включає перешкоджання доступу зовнішнього повітря у піддашшя під час несприятливих температурно-вологісних атмосферних умов, що характеризуються коливанням зовнішніх температур від 0 до -10 °С, який відрізняється тим, що перешкоджання доступу повітря здійснюється із використанням механізму, що складається із лопаті, яка обертається навколо...
Спосіб регулювання витрати рідини в трубопроводі та регулятор витрати
Номер патенту: 21829
Опубліковано: 30.04.1998
Автори: Жук Володимир Михайлович, Чернюк Володимир Васильович
МПК: G05D 7/00
Мітки: витрати, рідини, трубопроводі, спосіб, регулювання, регулятор
Формула / Реферат:
1. Спосіб регулювання витрати рідини в трубопроводі, який полягає у тому, що в потік рідини вводять домішку, який відрізняється тим, що в якості домішки використовують гідродинамічне активну рідину, витрату якої змінюють в залежності від зміни напору на вході у трубопровід.2. Спосіб регулювання по п. 1, який відрізняється тим, що в якості гідродинамічне активної рідини використовується розчин високомолекулярного . полімера з...
Попередній патент: Пристрій, спосіб та установка для піднімання залізничної рейки
Наступний патент: Медикаментозний засіб на основі рутину
Випадковий патент: Електроліт для нанесення сплавів вольфраму з металами родини феруму на пасивні метали та їх сплави