Автономна якірна гідроакустична буйкова станція
Номер патенту: 93959
Опубліковано: 25.03.2011
Автори: Шамарін Юрій Євгенович, Борецький Олександр Олександрович, Савіна Ірина Володимирівна, Шамарін Олексій Юрійович, Алексеєнко Валерій Миколайович
Формула / Реферат
Автономна якірна гідроакустична буйкова станція, яка містить підводний гідроакустичний буй з апаратурним відсіком та баластом, з'єднаними між собою стойками з прикріпленою до них гідроакустичною антеною, сполучений за допомогою буйрепа з якорем, радіобуї з пусковими пристроями, розміщені в контейнерах, які закріплені до апаратурного відсіку по його твірній, яка відрізняється тим, що гідроакустична антена виконана як комбінована векторно-фазова антена з рухомим корпусом, три складові частини якого з'єднані гнучкими сполученнями, такими як шнури, верхня частина корпусу антени у вигляді диска жорстко з'єднана зі стойками гідроакустичного буя, центральна та нижня частини корпусу антени є рухомі, центральна частина корпусу антени виконана як кільце, по периметру якого розташовані приймачі тиску акустичної хвилі, а саме 4 штуки, у центрі кільця на еластичних елементах кріплення встановлено векторний приймач гідроакустичних хвиль у вигляді сферичної оболонки, всередині якої на ложементі попарно симетрично відносно центру вздовж трьох взаємно перпендикулярних осей у прямокутній системі координат 0, X, Y, Z вмонтовані електродинамічні датчики, корпус кожного з яких має двосторонні шарнірні опори, розташовані вище центру важкості датчика та з'єднані з ложементом сфери, нижня частина корпусу антени виконана як диск і виконує функції рухомої противаги.
Текст
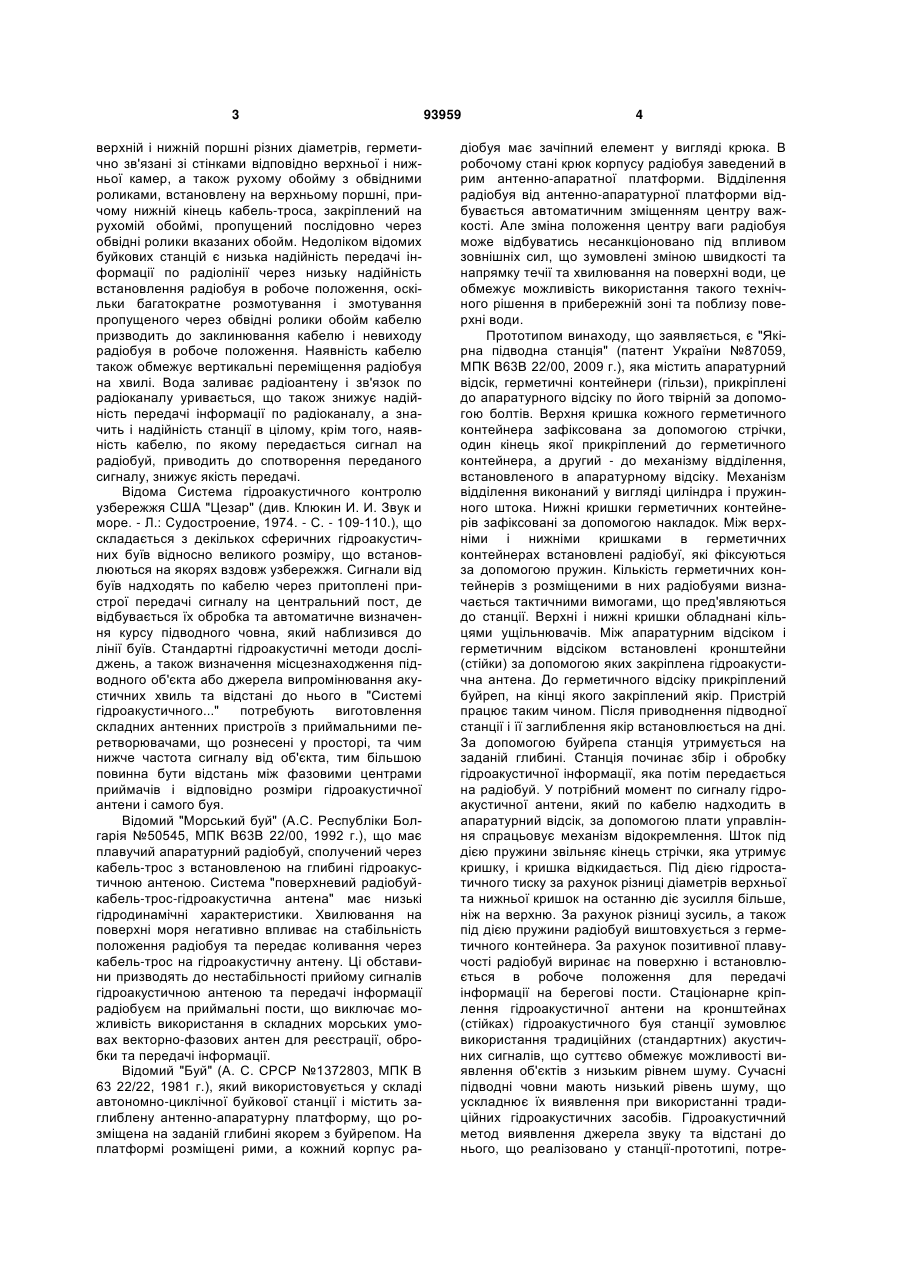
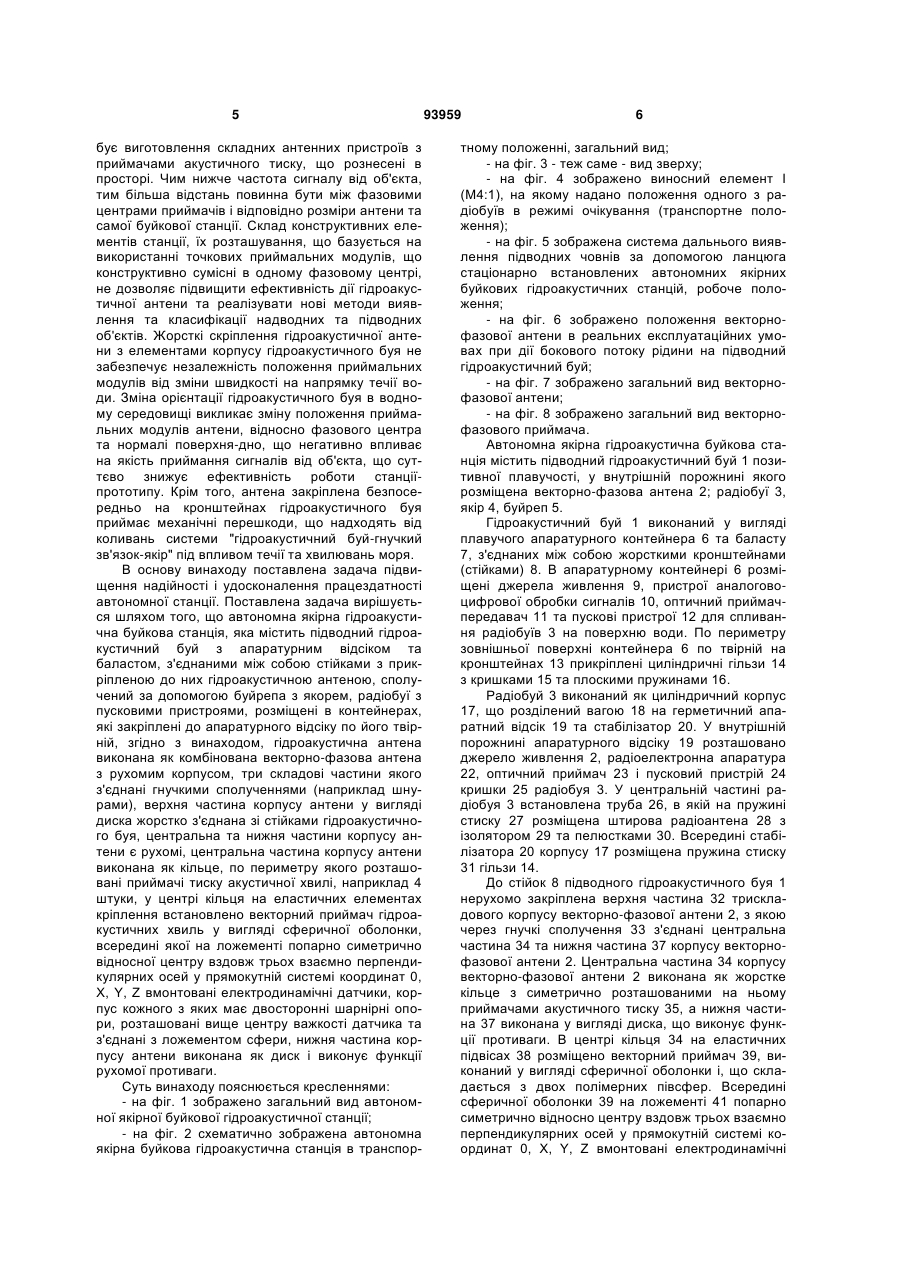
Автономна якірна гідроакустична буйкова станція, яка містить підводний гідроакустичний буй з апаратурним відсіком та баластом, з'єднаними між собою стойками з прикріпленою до них гідроакустичною антеною, сполучений за допомогою буйре C2 2 (19) 1 3 верхній і нижній поршні різних діаметрів, герметично зв'язані зі стінками відповідно верхньої і нижньої камер, а також рухому обойму з обвідними роликами, встановлену на верхньому поршні, причому нижній кінець кабель-троса, закріплений на рухомій обоймі, пропущений послідовно через обвідні ролики вказаних обойм. Недоліком відомих буйкових станцій є низька надійність передачі інформації по радіолінії через низьку надійність встановлення радіобуя в робоче положення, оскільки багатократне розмотування і змотування пропущеного через обвідні ролики обойм кабелю призводить до заклинювання кабелю і невиходу радіобуя в робоче положення. Наявність кабелю також обмежує вертикальні переміщення радіобуя на хвилі. Вода заливає радіоантену і зв'язок по радіоканалу уривається, що також знижує надійність передачі інформації по радіоканалу, а значить і надійність станції в цілому, крім того, наявність кабелю, по якому передається сигнал на радіобуй, приводить до спотворення переданого сигналу, знижує якість передачі. Відома Система гідроакустичного контролю узбережжя США "Цезар" (див. Клюкин И. И. Звук и море. - Л.: Судостроение, 1974. - С. - 109-110.), що складається з декількох сферичних гідроакустичних буїв відносно великого розміру, що встановлюються на якорях вздовж узбережжя. Сигнали від буїв надходять по кабелю через притоплені пристрої передачі сигналу на центральний пост, де відбувається їх обробка та автоматичне визначення курсу підводного човна, який наблизився до лінії буїв. Стандартні гідроакустичні методи досліджень, а також визначення місцезнаходження підводного об'єкта або джерела випромінювання акустичних хвиль та відстані до нього в "Системі гідроакустичного..." потребують виготовлення складних антенних пристроїв з приймальними перетворювачами, що рознесені у просторі, та чим нижче частота сигналу від об'єкта, тим більшою повинна бути відстань між фазовими центрами приймачів і відповідно розміри гідроакустичної антени і самого буя. Відомий "Морський буй" (А.С. Республіки Болгарія №50545, МПК В63В 22/00, 1992 г.), що має плавучий апаратурний радіобуй, сполучений через кабель-трос з встановленою на глибині гідроакустичною антеною. Система "поверхневий радіобуйкабель-трос-гідроакустична антена" має низькі гідродинамічні характеристики. Хвилювання на поверхні моря негативно впливає на стабільність положення радіобуя та передає коливання через кабель-трос на гідроакустичну антену. Ці обставини призводять до нестабільності прийому сигналів гідроакустичною антеною та передачі інформації радіобуєм на приймальні пости, що виключає можливість використання в складних морських умовах векторно-фазових антен для реєстрації, обробки та передачі інформації. Відомий "Буй" (А. С. СРСР №1372803, МПК В 63 22/22, 1981 г.), який використовується у складі автономно-циклічної буйкової станції і містить заглиблену антенно-апаратурну платформу, що розміщена на заданій глибині якорем з буйрепом. На платформі розміщені рими, а кожний корпус ра 93959 4 діобуя має зачіпний елемент у вигляді крюка. В робочому стані крюк корпусу радіобуя заведений в рим антенно-апаратної платформи. Відділення радіобуя від антенно-апаратурної платформи відбувається автоматичним зміщенням центру важкості. Але зміна положення центру ваги радіобуя може відбуватись несанкціоновано під впливом зовнішніх сил, що зумовлені зміною швидкості та напрямку течії та хвилювання на поверхні води, це обмежує можливість використання такого технічного рішення в прибережній зоні та поблизу поверхні води. Прототипом винаходу, що заявляється, є "Якірна підводна станція" (патент України №87059, МПК В63В 22/00, 2009 г.), яка містить апаратурний відсік, герметичні контейнери (гільзи), прикріплені до апаратурного відсіку по його твірній за допомогою болтів. Верхня кришка кожного герметичного контейнера зафіксована за допомогою стрічки, один кінець якої прикріплений до герметичного контейнера, а другий - до механізму відділення, встановленого в апаратурному відсіку. Механізм відділення виконаний у вигляді циліндра і пружинного штока. Нижні кришки герметичних контейнерів зафіксовані за допомогою накладок. Між верхніми і нижніми кришками в герметичних контейнерах встановлені радіобуї, які фіксуються за допомогою пружин. Кількість герметичних контейнерів з розміщеними в них радіобуями визначається тактичними вимогами, що пред'являються до станції. Верхні і нижні кришки обладнані кільцями ущільнювачів. Між апаратурним відсіком і герметичним відсіком встановлені кронштейни (стійки) за допомогою яких закріплена гідроакустична антена. До герметичного відсіку прикріплений буйреп, на кінці якого закріплений якір. Пристрій працює таким чином. Після приводнення підводної станції і її заглиблення якір встановлюється на дні. За допомогою буйрепа станція утримується на заданій глибині. Станція починає збір і обробку гідроакустичної інформації, яка потім передається на радіобуй. У потрібний момент по сигналу гідроакустичної антени, який по кабелю надходить в апаратурний відсік, за допомогою плати управління спрацьовує механізм відокремлення. Шток під дією пружини звільняє кінець стрічки, яка утримує кришку, і кришка відкидається. Під дією гідростатичного тиску за рахунок різниці діаметрів верхньої та нижньої кришок на останню діє зусилля більше, ніж на верхню. За рахунок різниці зусиль, а також під дією пружини радіобуй виштовхується з герметичного контейнера. За рахунок позитивної плавучості радіобуй виринає на поверхню і встановлюється в робоче положення для передачі інформації на берегові пости. Стаціонарне кріплення гідроакустичної антени на кронштейнах (стійках) гідроакустичного буя станції зумовлює використання традиційних (стандартних) акустичних сигналів, що суттєво обмежує можливості виявлення об'єктів з низьким рівнем шуму. Сучасні підводні човни мають низький рівень шуму, що ускладнює їх виявлення при використанні традиційних гідроакустичних засобів. Гідроакустичний метод виявлення джерела звуку та відстані до нього, що реалізовано у станції-прототипі, потре 5 бує виготовлення складних антенних пристроїв з приймачами акустичного тиску, що рознесені в просторі. Чим нижче частота сигналу від об'єкта, тим більша відстань повинна бути між фазовими центрами приймачів і відповідно розміри антени та самої буйкової станції. Склад конструктивних елементів станції, їх розташування, що базується на використанні точкових приймальних модулів, що конструктивно сумісні в одному фазовому центрі, не дозволяє підвищити ефективність дії гідроакустичної антени та реалізувати нові методи виявлення та класифікації надводних та підводних об'єктів. Жорсткі скріплення гідроакустичної антени з елементами корпусу гідроакустичного буя не забезпечує незалежність положення приймальних модулів від зміни швидкості на напрямку течії води. Зміна орієнтації гідроакустичного буя в водному середовищі викликає зміну положення приймальних модулів антени, відносно фазового центра та нормалі поверхня-дно, що негативно впливає на якість приймання сигналів від об'єкта, що суттєво знижує ефективність роботи станціїпрототипу. Крім того, антена закріплена безпосередньо на кронштейнах гідроакустичного буя приймає механічні перешкоди, що надходять від коливань системи "гідроакустичний буй-гнучкий зв'язок-якір" під впливом течії та хвилювань моря. В основу винаходу поставлена задача підвищення надійності і удосконалення працездатності автономної станції. Поставлена задача вирішується шляхом того, що автономна якірна гідроакустична буйкова станція, яка містить підводний гідроакустичний буй з апаратурним відсіком та баластом, з'єднаними між собою стійками з прикріпленою до них гідроакустичною антеною, сполучений за допомогою буйрепа з якорем, радіобуї з пусковими пристроями, розміщені в контейнерах, які закріплені до апаратурного відсіку по його твірній, згідно з винаходом, гідроакустична антена виконана як комбінована векторно-фазова антена з рухомим корпусом, три складові частини якого з'єднані гнучкими сполученнями (наприклад шнурами), верхня частина корпусу антени у вигляді диска жорстко з'єднана зі стійками гідроакустичного буя, центральна та нижня частини корпусу антени є рухомі, центральна частина корпусу антени виконана як кільце, по периметру якого розташовані приймачі тиску акустичної хвилі, наприклад 4 штуки, у центрі кільця на еластичних елементах кріплення встановлено векторний приймач гідроакустичних хвиль у вигляді сферичної оболонки, всередині якої на ложементі попарно симетрично відносної центру вздовж трьох взаємно перпендикулярних осей у прямокутній системі координат 0, X, Y, Z вмонтовані електродинамічні датчики, корпус кожного з яких має двосторонні шарнірні опори, розташовані вище центру важкості датчика та з'єднані з ложементом сфери, нижня частина корпусу антени виконана як диск і виконує функції рухомої противаги. Суть винаходу пояснюється кресленнями: - на фіг. 1 зображено загальний вид автономної якірної буйкової гідроакустичної станції; - на фіг. 2 схематично зображена автономна якірна буйкова гідроакустична станція в транспор 93959 6 тному положенні, загальний вид; - на фіг. 3 - теж саме - вид зверху; - на фіг. 4 зображено виносний елемент І (М4:1), на якому надано положення одного з радіобуїв в режимі очікування (транспортне положення); - на фіг. 5 зображена система дальнього виявлення підводних човнів за допомогою ланцюга стаціонарно встановлених автономних якірних буйкових гідроакустичних станцій, робоче положення; - на фіг. 6 зображено положення векторнофазової антени в реальних експлуатаційних умовах при дії бокового потоку рідини на підводний гідроакустичний буй; - на фіг. 7 зображено загальний вид векторнофазової антени; - на фіг. 8 зображено загальний вид векторнофазового приймача. Автономна якірна гідроакустична буйкова станція містить підводний гідроакустичний буй 1 позитивної плавучості, у внутрішній порожнині якого розміщена векторно-фазова антена 2; радіобуї 3, якір 4, буйреп 5. Гідроакустичний буй 1 виконаний у вигляді плавучого апаратурного контейнера 6 та баласту 7, з'єднаних між собою жорсткими кронштейнами (стійками) 8. В апаратурному контейнері 6 розміщені джерела живлення 9, пристрої аналоговоцифрової обробки сигналів 10, оптичний приймачпередавач 11 та пускові пристрої 12 для спливання радіобуїв 3 на поверхню води. По периметру зовнішньої поверхні контейнера 6 по твірній на кронштейнах 13 прикріплені циліндричні гільзи 14 з кришками 15 та плоскими пружинами 16. Радіобуй 3 виконаний як циліндричний корпус 17, що розділений вагою 18 на герметичний апаратний відсік 19 та стабілізатор 20. У внутрішній порожнині апаратурного відсіку 19 розташовано джерело живлення 2, радіоелектронна апаратура 22, оптичний приймач 23 і пусковий пристрій 24 кришки 25 радіобуя 3. У центральній частині радіобуя 3 встановлена труба 26, в якій на пружині стиску 27 розміщена штирова радіоантена 28 з ізолятором 29 та пелюстками 30. Всередині стабілізатора 20 корпусу 17 розміщена пружина стиску 31 гільзи 14. До стійок 8 підводного гідроакустичного буя 1 нерухомо закріплена верхня частина 32 трискладового корпусу векторно-фазової антени 2, з якою через гнучкі сполучення 33 з'єднані центральна частина 34 та нижня частина 37 корпусу векторнофазової антени 2. Центральна частина 34 корпусу векторно-фазової антени 2 виконана як жорстке кільце з симетрично розташованими на ньому приймачами акустичного тиску 35, а нижня частина 37 виконана у вигляді диска, що виконує функції противаги. В центрі кільця 34 на еластичних підвісах 38 розміщено векторний приймач 39, виконаний у вигляді сферичної оболонки і, що складається з двох полімерних півсфер. Всередині сферичної оболонки 39 на ложементі 41 попарно симетрично відносно центру вздовж трьох взаємно перпендикулярних осей у прямокутній системі координат 0, X, Y, Z вмонтовані електродинамічні 7 датчики 40, корпус кожного з яких має двосторонні шарнірні опори 42, розташовані вище центру важкості датчика та з'єднані з ложементом сфери. Еластичні підвіси 38 закріплені відповідно до верхньої 32, центральної 34 та нижньої 37 складових частин корпусу векторно-фазової антени 2. До стійок 8 гідроакустичного буя 1 прикріплений запобіжник течії 41. В робочому положенні гідроакустичний буй 1 з векторно-фазовою антеною 2 та радіобуями 3 утримується на заданій глибині за допомогою якоря 4 та буйрепа 5, при цьому сферичний векторний приймач 39 векторно-фазової антени 2 разом з блоком електродинамічних датчиків 40 утворює симетричну конструкцію з позитивною плавучістю, у якої центр мас збігається з геометричним центром. Прийняті векторно-фазовою антеною 2 гідроакустичні сигнали від надводних та підводних об'єктів, шуми моря, та ін. перетворюються в електричну напругу, пропорційну рівню отриманих сигналів та чутливості приймачів 39, 40. Далі електричний сигнал надходить до пристрою аналоговоцифрової обробки 10 для аналізу і прийняття рішення про виявлення підводного об'єкта з визначенням дальності та пеленгу. Автономна якірна гідроакустична буйкова станція працює з радіобуями 3 разового використання, які стартують з глибини, на якій встановлена підводний гідроакустичний буй 1, по команді, що надійшла з пристрою аналогово-цифрової обробки 10, при цьому інформація надходить через оптичний приймач-передавач 11 та оптичний приймач 23 до радіоелектронної апаратури 22, а команда на спливання радіобуя 3 - на пусковий пристрій 12 відокремлення кришки 15 плоскою пружиною 16. Під дією пружини стиснення 31 та позитивної плавучості корпусу 17 радіобуя 3 спливає на поверхню води, після чого спрацьовує пусковий пристрій 24 відділення кришки 25 та пружина стиснення 27 виштовхує радіоантену 28 в робоче положення для передачі інформації про підводний об'єкт на приймальний пост. Роз'єднання корпусу 17 радіобуя 3 вагою 18 на герметичний відсік 19 та стабілізатор 20 дозволяє: - в транспортному положенні розмістити всередині стабілізатора 20 пружину стиснення 31; - за рахунок приєднання маси води стабілізатора 20 в стані радіобуя 3 на поверхні води покращує гідродинамічні характеристики радіобуя 3, що суттєво підвищує якість радіосигналу, що передається, і таким чином підвищує ефективність 93959 8 роботи станції в цілому. В робочому положенні підводний гідроакустичний буй 1 під дією змінних сил водного середовища прибережної зони (зміна швидкості та напрямку течії, хвилювання на поверхні) відхиляється від вертикального положення (фіг. 5). Склад елементів векторно-фазової антени 2, їх розташування та взаємодія між собою та корпусом гідроакустичного буя 1 через гнучкі сполучення (наприклад шнури) 33, 36 та еластичні елементи кріплення 38 забезпечує незмінну орієнтацію трьох взаємно перпендикулярних осей X, Y, Z з центром 0 у сферичній оболонці векторного приймача 39 в прямокутній системі координат відносно нормалі N поверхня-дно, за рахунок вільного переміщення під дією сили тяжіння Р рухомих середньої 34 та нижньої 37 складових частин корпусу векторнофазової антени 2 та позитивної пливучості сферичної оболонки 39. Крім того, за рахунок того, що корпуси електродинамічних датчиків 40 мають двосторонні шарнірні опори 42, розташовані вище центру важкості датчика 40, які з'єднані з ложементом 41 сфери 39, кожен датчик у випадку нахилу векторного приймача зберігає стабільне положення відносно нормалі N поверхня-дно. Взаємодія конструктивних елементів гідроакустичної антени, що відслідковує зміну кута нахилу гідроакустичного буя та виключає дестабілізацію положення приймачів 35, 40, дозволяє: - вільне переміщення сферичної оболонки 39 в напрямку діючої гідроакустичної хвилі; - стабільну, відносно нормалі N поверхня-дно, орієнтацію осей X, Y, Z сферичної оболонки векторного приймача 39 векторно-фазової антени 2; - захист датчиків 40 векторного приймача 39 від вібраційних завад. Таким чином, сукупність конструктивних елементів векторно-фазової антени і її датчиків, розміщення та взаємозв'язок між собою та елементами гідроакустичної станції суттєво підвищує ефективність і надійність роботи станції в режимі приймання сигналів та передачі їх на берегові пости в складних морських умовах. В основу винаходу була поставлена задача підвищення надійності, ефективності і удосконалення працездатності автономної якірної гідроакустичної буйкової станції шляхом того, що гідроакустична антена виконана як комбінована векторнофазова антена з рухомим корпусом, сукупність конструктивних елементів якої приводить до підвищення всіх вищеназваних показників. 9 93959 10 11 93959 12 13 93959 14 15 93959 16 17 93959 18 19 Комп’ютерна верстка А. Крулевський 93959 Підписне 20 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAutonomous anchor sonar buoy station
Автори англійськоюShamarin Yurii Yevhenovych, Alekseienko Valerii Mykolaiovych, Boretskyi Oleksandr Oleksandrovych, Shamarin Oleksii Yuriiovych, Savina Iryna Volodymyrivna
Назва патенту російськоюАвтономная якорная гидроакустическая буйковая станция
Автори російськоюШамарин Юрий Евгеньевич, Алексеенко Валерий Николаевич, Борецкий Александр Александрович, Шамарин Алексей Юрьевич, Савина Ирина Владимировна
МПК / Мітки
МПК: B63B 22/00
Мітки: гідроакустична, буйкова, станція, автономна, якірна
Код посилання
<a href="https://ua.patents.su/10-93959-avtonomna-yakirna-gidroakustichna-bujjkova-stanciya.html" target="_blank" rel="follow" title="База патентів України">Автономна якірна гідроакустична буйкова станція</a>
Якірна підводна станція
Номер патенту: 87059
Опубліковано: 10.06.2009
Автори: Шамарін Юрій Євгенович, Лановий Юрій Іванович, Кріпіневіч Валентина Васильєвна, Шамарін Олексій Юрійович, Міронов Юхим Пилипович, Шабазов Володимир Єфремович
МПК: B63B 22/00
Мітки: якірна, станція, підводна
Формула / Реферат:
Якірна підводна станція, яка містить герметичний відсік, сполучений з допомогою буйрепа з якорем, радіобуї і апаратурний відсік, яка відрізняється тим, що радіобуї розміщені в герметичних контейнерах, які прикріплені до апаратурного відсіку по його твірній, верхня кришка кожного герметичного контейнера по діаметру менша за нижню і зафіксована з допомогою стрічки, пов'язаної з механізмом відділення, який виконаний у вигляді циліндра зі штоком,...
Гідроакустична антена

Номер патенту: 87403
Опубліковано: 10.07.2009
Автори: Коцюба Віталій Семенович, Клімов Олександр Євдокимович, Дащенко Валерій Михайлович, Шамарін Олексій Юрійович, Борецький Олександр Олександрович
МПК: G01S 13/00, H04R 1/40
Мітки: антена, гідроакустична
Формула / Реферат:
Гідроакустична антена, що складається із співвісного набору п'єзокерамічних кільцевих перетворювачів, електроди кожного з яких розділені на рівні сектори, яка відрізняється тим, що до торців кожного з сусідніх п'єзокерамічних кільцевих перетворювачів, із забезпеченням однакової орієнтації в просторі однотипних секторів електродів кожного з перетворювачів, виконаних відкритими, попарно в N точках, де N ³ 3, які розташовані з кутовим...
Буйкова гідрофізична станція
Номер патенту: 16832
Опубліковано: 29.08.1997
Автори: Барабаш Валерій Олександрович, Багимов Ігор Сергійович
МПК: B63B 22/00
Мітки: буйкова, гідрофізична, станція
Формула / Реферат:
1 Буйковая гидрофизическая система, содержащая притопленный буй с приборным контейнером, который соединен кабельной линией с аппаратурой надводной платформы, при этом упомянутая кабельная линия образована из двух участков, первый из которых выполнен с отрицательной плавучестью, причем один конец второго участка связан с аппаратурой надводной платформы, а другой с грузом и одним концом первого участка, который снабжен по крайней мере одним...
Підводна буйкова станція

Номер патенту: 16831
Опубліковано: 29.08.1997
Автор: Барабаш Валерій Олександрович
МПК: B63B 22/00
Мітки: станція, підводна, буйкова
Формула / Реферат:
1. Подводная буйковая станция, содержащая сигнальный буй, связанный с модулем правучести, который посредством буйрепа, с закрепленными на нем автономными измерителями и через размыкатель соединен с донным якорем, отличающаяся тем, что, с целью повышения надежности и эффективности работы путем обеспечения возможности измерения в непосредственной близости от дна, буйреп модуля плавучести выполнен из двух частей, при этом конец буйрепа первой...
Морська якірна міна
Номер патенту: 31308
Опубліковано: 10.04.2008
Автори: Черненька Валентина Петрівна, Азаренко Олена Василівна, Дівізінюк Михайло Михайлович, Чернявська Світлана Олексіївна, Шумейка Ірина Петрівна
МПК: F42B 22/00
Формула / Реферат:
Морська якірна міна, що містить корпус, в якому розміщені заряд вибухових речовин, детонатори, запальний пристрій та камера з апаратурою підривного пристрою, при цьому корпус з'єднаний з якорем за допомогою мінрепу, яка відрізняється тим, що корпус міни виготовлений в вигляді дзиґи.
Попередній патент: Монета для жеребу
Наступний патент: Форсунка для впорскування рідкого палива у двигун внутрішнього згоряння
Випадковий патент: Вальцьова дробарка