Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти
Номер патенту: 99509
Опубліковано: 27.08.2012
Автори: Борисюк Михайло Дем'янович, Магерамов Лютфалій Курбан-Аліевич, Лещенко Олег Іванович, Поповіченко Олександр Вікторович, Беліков Віктор Тріфонович, Дяченко Олександр Феодосійович
Формула / Реферат
1. Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти, що містить броньований корпус, усередині якого розміщені один або декілька джерел енергії і її перетворювачів, гарматна башта з артилерійським і стрілецьким озброєнням, закріплена на корпусі з можливістю електромеханічного повороту навколо вертикальної осі, і що знаходиться поза корпусом закріплений на ньому гусеничний рушій, яка відрізняється тим, що як електромеханічний приводний силовий елемент повороту башти застосований електродвигун трансверсального типу, постійні магніти збудження основного магнітного поля якого рівномірно закріплені по всьому колу корпусу гарматної башти, а статор з якірними обмотками управління жорстко прикріплений до елементів внутрішньої або зовнішньої поверхні корпуса.
2. Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти за п. 1, яка відрізняється тим, що магнітопровід статора приводного трансверсального електричного двигуна виконаний у вигляді суцільної кільцевої конструкції Ш-подібного поперечного перерізу і вертикально закріплений на горизонтальному кільцевому майданчику, встановленому на кронштейнах, жорстко прикріплених до внутрішньої поверхні корпусу військової гусеничної машини, причому постійні магніти вказаного приводного двигуна закріплені на вертикальному феромагнітному кільці, яке закріплене на верхньому погоні башти.
3. Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти за п. 1, яка відрізняється тим, що магнітопровід статора приводного трансверсального електричного двигуна виконаний у вигляді суцільної кільцевої конструкції Ш-подібного поперечного перерізу, встановленої під кутом до горизонту на вертикальних кронштейнах, закріплених на внутрішній поверхні корпусу військової гусеничної машини, причому постійні магніти вказаного приводного двигуна закріплені під таким же кутом нахилу до горизонту на внутрішній поверхні башти.
4. Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти за п. 1, яка відрізняється тим, що кільцевий Ш-подібний магнітопровід статора приводного трансверсального електродвигуна встановлений горизонтально на суцільному кільцевому Г-подібному кронштейні, закріпленому на зовнішній поверхні корпусу поза гарматною баштою військової гусеничної машини, причому комплект постійних магнітів двигуна так само розміщений горизонтально і жорстко встановлений на горизонтальному кільці верхнього погона башти.
5. Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти за пп. 1, 2, 3, і 4, яка відрізняється тим, що електричний привід доповнений цівковим механічним приводом, в якому приводне колесо має механічне зачеплення з постійними магнітами приводного електродвигуна.
6. Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти за пп. 1, 2, 3, і 4, яка відрізняється тим, що магнітопровід статора приводного трансверсального електродвигуна виконаний у вигляді набору дискретних дугових елементів, мінімальна кількість яких може бути рівна одному.
Текст
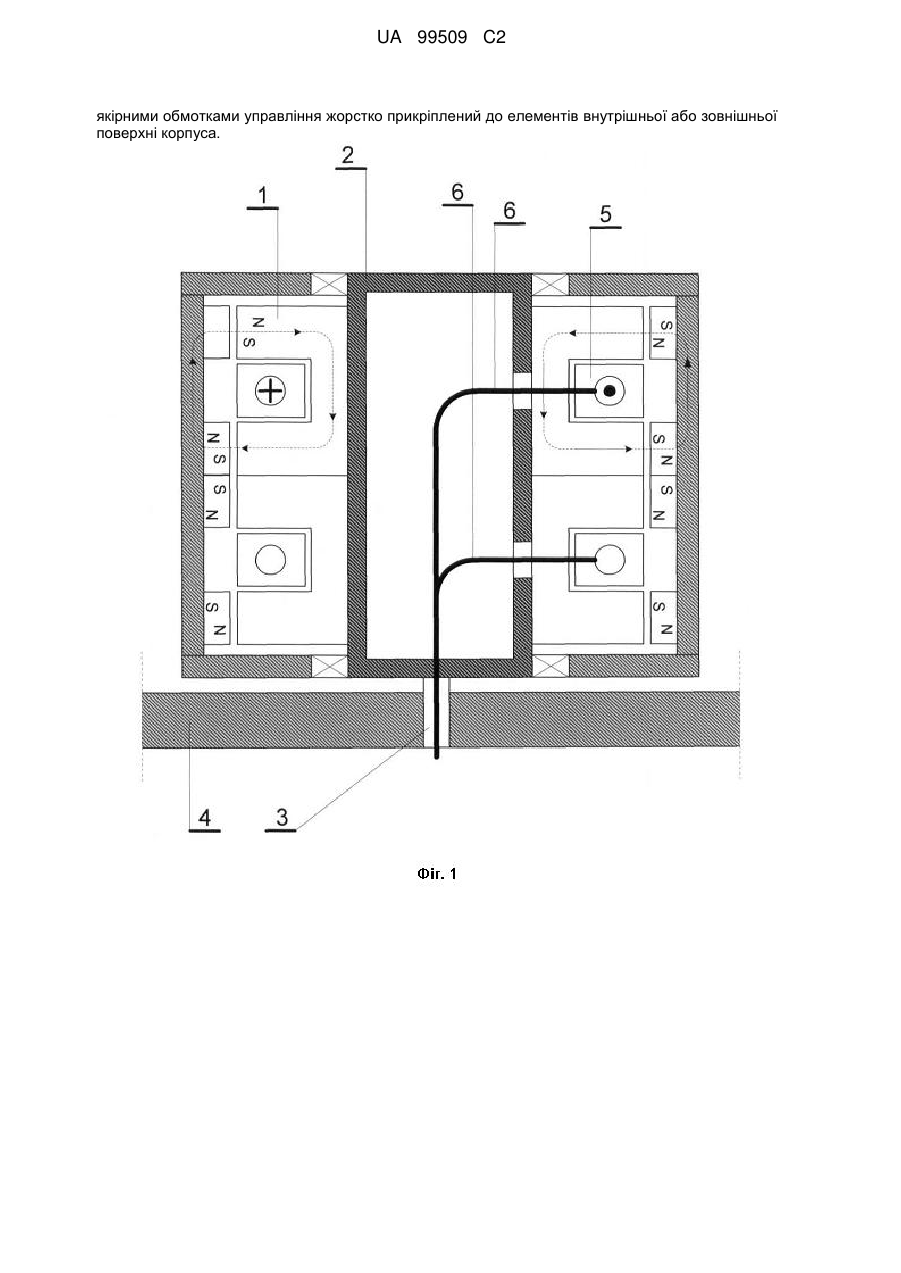
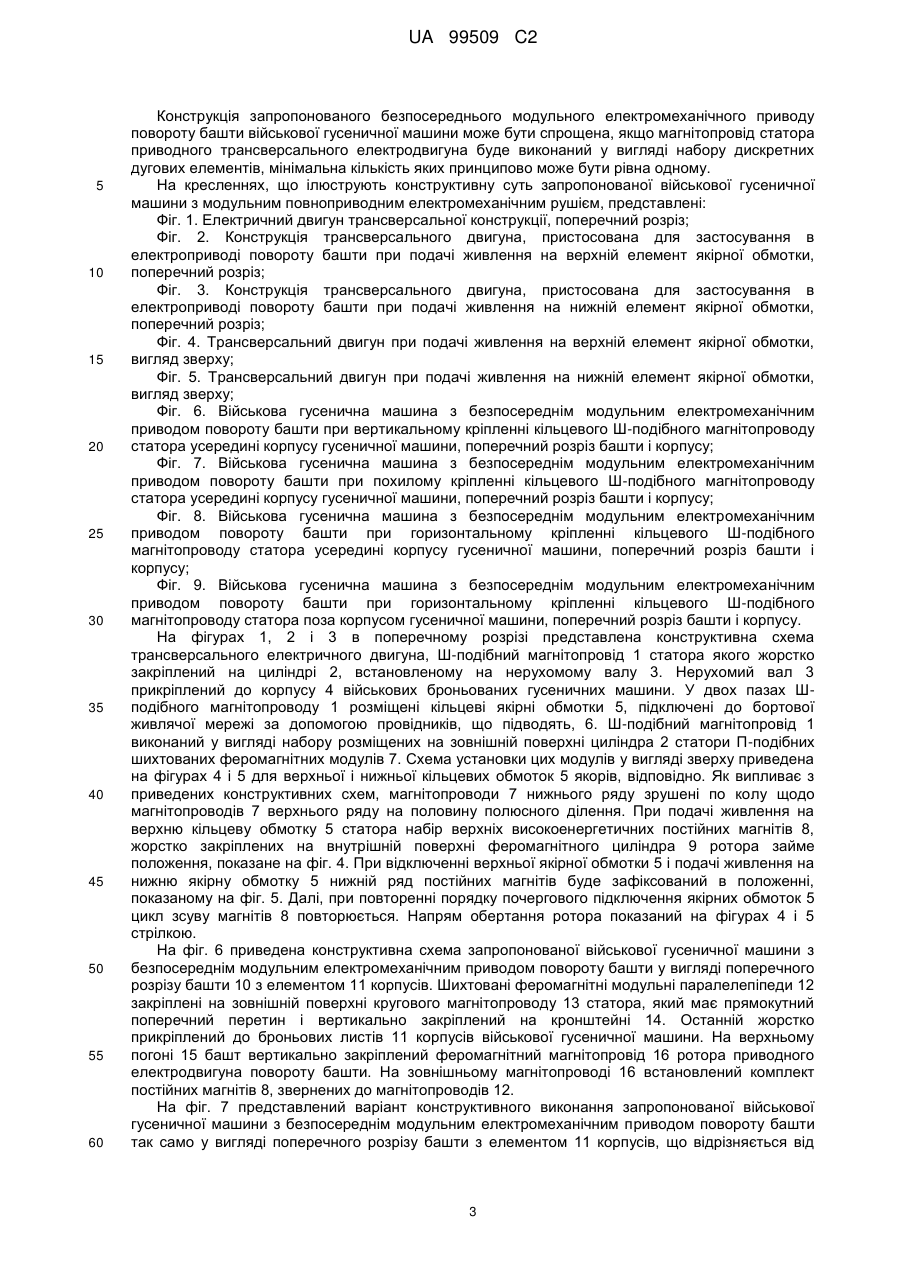
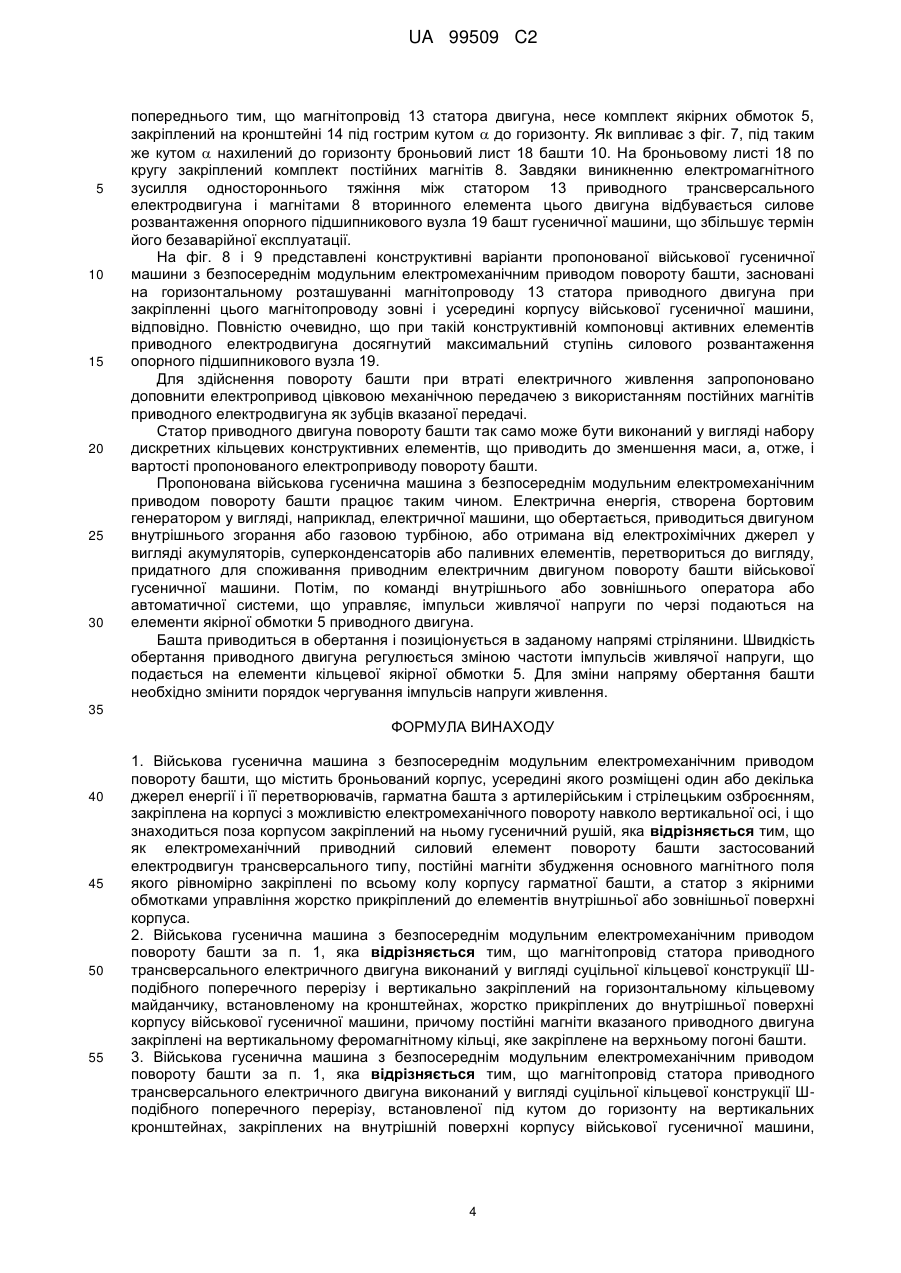
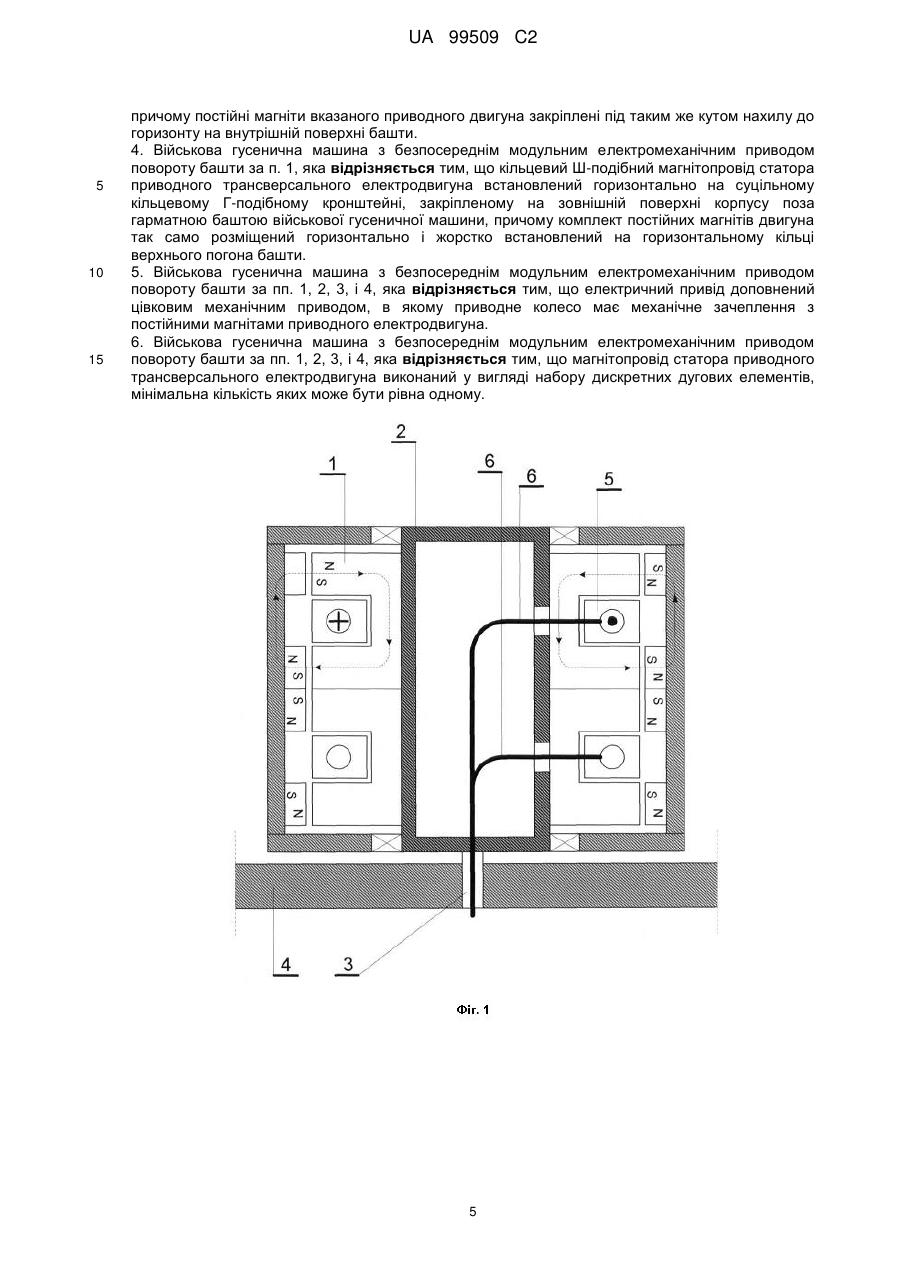
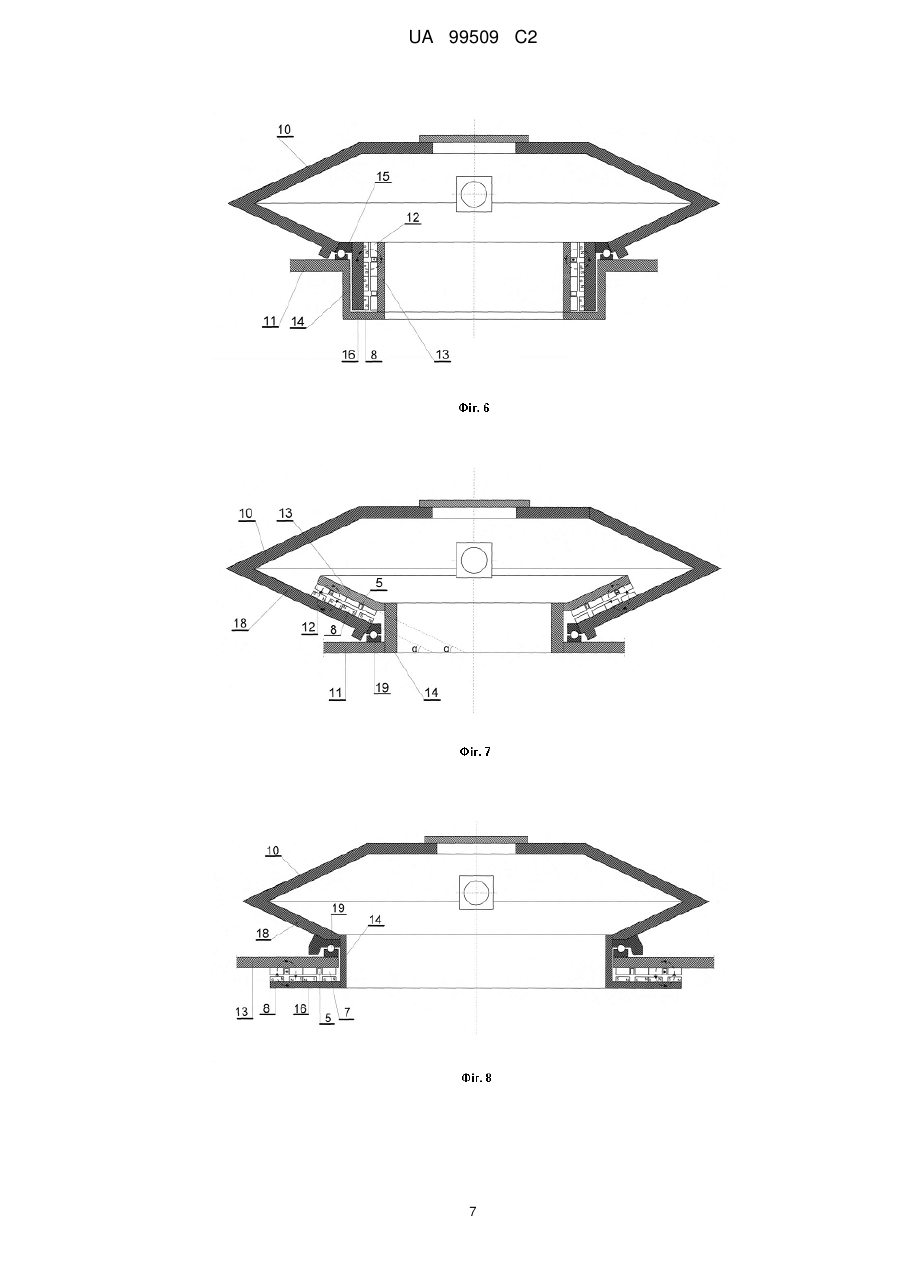
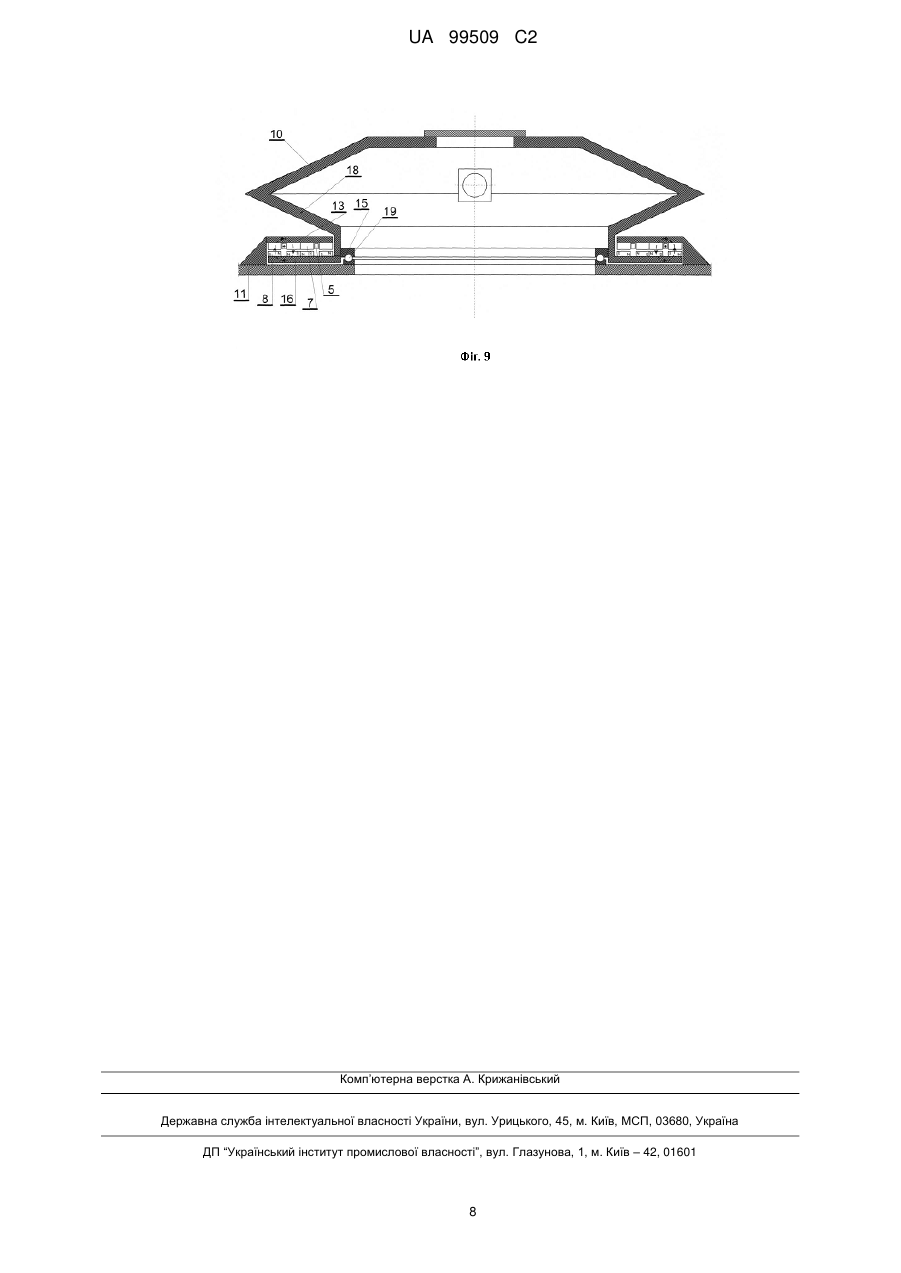
Реферат: Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти містить броньований корпус, усередині якого розміщені один або декілька джерел енергії і її перетворювачів, гарматна башта з артилерійським і стрілецьким озброєнням, закріплена на корпусі з можливістю електромеханічного повороту навколо вертикальної осі, і що знаходиться поза корпусом закріплений на ньому гусеничний рушій. Для створення додаткового значного ефекту магнітного розвантаження опорних підшипників гарматної башти та підвищення живучості як електромеханічний приводний силовий елемент повороту башти застосований електродвигун трансверсального типу, постійні магніти збудження основного магнітного поля якого рівномірно закріплені по всьому колу корпуса гарматної башти, а статор з UA 99509 C2 (12) UA 99509 C2 якірними обмотками управління жорстко прикріплений до елементів внутрішньої або зовнішньої поверхні корпуса. UA 99509 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області військової бронетанкової техніки, а саме до військових броньованих гусеничних і колісних машин, для повороту гарматних башт яких використовуються електричні двигуни. Застосування електричних двигунів для приведення в рух транспортних систем і механізмів, у яких основними джерелами енергії служать двигуни внутрішнього згоряння, або електрохімічні її джерела, є однією з принципових тенденцій розвитку сучасної техніки. Відомо, що велика увага розробкам в області електричних приводів для забезпечення функціонування практично всього комплексу механізмів бронетанкової техніки приділяється фахівцями всіх розвинених у військово-технічному відношенні країн, що виробляють гусеничну бронетанкову техніку. У цьому плані великий інтерес представляють практичні реалізації подібних електромеханічних систем в США, ФРН, Великобританії і Ізраїлі. Зусилля більшості розробників гусеничної бронетанкової техніки направлені на досягнення науково-технічного прориву в цій області військової техніки в принципово новому напрямі, який полягає в концепції створення повністю електричних танків AET (All Electric Tank) і інших бойових броньованих машин. Перші результати досліджень і розробок в цьому напрямі були представлені в статті полковника О. Іванова "Американський електричний танк АЕТ" [див. журнал "Зарубіжний військовий огляд". - М., 1997. - № 4. - С. 25-29]. Разом з тим слід зазначити, що аж до найостаннішого часу електромеханічний привід повороту башти танка складається з прикріпленого до корпусу танка електричного двигуна, у ряді випадків забезпеченого вбудованим редуктором, і зубчатого колеса, що закріплено в нижній частині гарматної башти і приводиться в обертання шестірнею, що знаходиться або безпосередньо на валу двигуна, або на вихідному валу його редуктора [див., наприклад, А.С. Антонов, Б.А. Артамонов, Б.М. Коробков, Е.І. Магидович. Танк. Москва: Воениздат, 1954, 608 с; под ред. маршала А.Х. Бабаджаняна. Танки и танковые войска. - М.: Воениздат, 1980.-432 с.]. Як прототип винаходу, що заявляється, прийнятий "Бойовий модуль" згідно з патентом України № 25671 від 10.08.2007 р. Тут, подібно до інших, достатньо широко поширеним технічним рішенням приведення гарматної башти в обертання проводиться за допомогою закріпленого на корпусі модуля електричного двигуна обертального типу, ротор якого через систему зубчатих передач пов'язаний із зубчатим вінцем, жорстко закріпленим в нижній частині гарматної башти. Недоліки прототипу якраз і обумовлені наявністю системи проміжних механічних передач між ротором електродвигуна, на який впливає створюване в результаті електромеханічного перетворення енергії електромагнітне зусилля, і корпусом гарматної башти. Наявність таких передач не тільки збільшує вартість приводу, але і знижує надійність його експлуатації, що особливо важливо для механізмів, що розробляються для використання у військовій техніці. Саме тому найсучасніші тенденції розвитку електромеханічних приводів у всіх без виключення областях техніки, включаючи, природно, військову, припускають застосування прямих, безпосередніх, безпередатних електроприводів. Електромеханічні приводи такого типу засновані на тому, що електромеханічне перетворення енергії відбувається практично в безпосередній близькості від зон основних технологічних процесів, в даному випадку, - в зоні повороту гарматної башти. Очевидно, що в прямих, безпосередніх, безпередатних електромеханічних приводах повністю усунені проміжні передачі будь-якого вигляду, оскільки конструктивні елементи ротора, що фізично створюють електромагнітне зусилля двигуна, безпосереднім чином, тобто механічно жорстко, об'єднуються з тими деталями механізму, які повинні бути приведені в рух. Завдяки цьому різко спрощується конструкція всього пристрою, знижується його вартість і, відповідно, підвищується надійність механізму. Завдяки цьому конструкція всього приводу стає значно більш простою, знижується його загальна вартість, що у відповідній мірі підвищує експлуатаційну надійність механізму. Проте існує ще одна важлива принципова особливість прямих, безпосередніх приводів повороту башти військових гусеничних машин, визначувана специфікою конструкції приводного електричного двигуна. Ряд конструктивних виконань таких двигунів дає можливість використовувати вельми значні зусилля одностороннього магнітного тяжіння, що виникають між рухомим і нерухомим елементами приводного електродвигуна, для розвантаження підшипникового опорного вузла, на якому обертається башта, що приводиться двигуном. Саме, виходячи з вищезгаданих міркувань, з метою усунення недоліків прототипу, в винаході, що заявляється, нами запропоновано забезпечити військову гусеничну машину безпосереднім модульним електромеханічним приводом повороту башти. Для цього запропоновано використовувати електродвигуни з поперечним контуром замикання основного магнітного потоку, тобто електричні двигуни трансверсального типу, розроблені в Німеччині співробітниками Військового інституту Бундесверу [див., наприклад, H.Weh, H.Mosebach: 1 UA 99509 C2 5 10 15 20 25 30 35 40 45 50 55 60 "Transversalflussmaschinen", Wehrtechnisches Symposium "Moderne elektrische Energietechnik in der Bundeswehr", 27-29.11.1989; H.Weh, H.May, M.Shalaby: "Highly Effective Magnetic Circuits Permanent Magnet Exited Synchronous machines", Proc. ICEM 1990, Cambridge, USA]. Крім простоти конструкції електричні двигуни трансверсального типу в тих же габаритах, що і звичайні електричні двигуни обертального типу з постійними магнітами, розвивають потужності, великі на 40-45 %. Це є особливо важливим чинником для приводних електричних двигунів таких механізмів, робота яких проходить в динамічно форсованих режимах, особливо характерних для пристроїв повороту башт бойових гусеничних машин. Простота конструкції трансверсальних електричних двигунів, з одного боку, обумовлена тим, що їх якірні обмотки виконані у вигляді кільцевих обмоток, які у двигунів трансверсальної конструкції, на відміну від секцій якірних обмоток електродвигунів звичайного виконання, позбавлені елементів, що безпосередньо не беруть участь в електромеханічному перетворенні енергії. З іншого боку, простота конструкції вказаних двигунів обумовлена застосуванням високоенергетичних постійних магнітів простої прямокутної форми для створення основного магнітного поля. З метою застосування описаних вище електричних двигунів у військовій гусеничній машині з безпосереднім модульним електромеханічним приводом повороту башти запропоновано жорстко закріпити на башті гусеничної машини висококоерцітивні постійні магніти збудження основного магнітного поля приводного трансверсального електродвигуна, рівномірно розподіливши їх по всьому колу її корпусу. Таким чином, корпусний елемент гарматної башти в електромагнітному плані стає ротором приводного двигуна повороту башти. Статор приводного двигуна повороту башти з кільцевою якірною обмоткою може бути встановлений як у внутрішній частині корпусу військової гусеничної машини, так і ззовні нього. У обох випадках комплект модульних блоків-модулів, що входять до складу статора приводного двигуна, повинен бути жорстко закріплений на монтажних елементах конструкції зовні або усередині корпусу танка. Перший варіант безпосереднього модульного електромеханічного приводу повороту башти військової гусеничної машини містить приводний трансверсальний електричний двигун, статор якого виконаний у вигляді суцільної кільцевої конструкції Ш-подібного поперечного перерізу і вертикально закріплений на горизонтальної кільцевої площадці, встановленої на кронштейнах, жорстко прикріплених до внутрішньої поверхні корпусу військової гусеничної машини, причому постійні магніти вказаного приводного двигуна закріплені на вертикальному феромагнітному кільці, яке, у свою чергу, закріплене на верхньому погоні башти. У другому конструктивному варіанті безпосереднього модульного електромеханічного приводу повороту башти військової гусеничної машини магнітопровід статора приводного трансверсального електричного двигуна так само запропоновановиконати у вигляді суцільної кільцевої конструкції Ш-подібного поперечного перерізу, але, на відміну від першого варіанта, встановленою під кутом до горизонту на вертикальних кронштейнах, закріплених на внутрішній поверхні корпусу військової гусеничної машини. В цьому випадку постійні магніти вказаного приводного двигуна необхідно так само закріпити під таким же кутом нахилу до горизонту на внутрішній поверхні башти. Таке конструктивне виконання приводного трансверсального електродвигуна дозволяє корисно використовувати зусилля одностороннього магнітного тяжіння між рухомою і нерухомою частинами приводного двигуна для магнітного розвантаження опорного підшипникового вузла повороту башти. Розрахунки зусилля тяжіння показують, що при куті нахилу, рівному 30 градусів, сила одностороннього магнітного тяжіння складе 5,0 т, що розвантажить опорний вузол башти приблизно на 30 %. При цьому застосування високоенергетичних постійних магнітів забезпечує постійне розвантаження опор незалежно від того, підключений приводний електродвигун до живлячої електромережі чи ні. Конструктивне виконання третього варіанта запропонованого безпосереднього модульного електромеханічного приводу повороту башти військової гусеничної машини відрізняється тим, що кільцевий Ш-подібний магнітопровід статора приводного трансверсального електродвигуна встановлений горизонтально на суцільному кільцевому Г-подібному кронштейні, закріпленому на зовнішній поверхні корпусу поза гарматною баштою військової гусеничної машини, причому комплект постійних магнітів двигуна так само розміщений горизонтально і жорстко встановлений на горизонтальному кільці верхнього погона башти. Розрахунки показують, що в цьому випадку розвантажувальне зусилля зменшить навантаження на опорний вузол вже на 60 %. Для реалізації можливості повороту башти при відмові системи електроживлення запропоновано доповнити безпосередній електричний привід механічним приводом з цівковим зачепленням, в якому додаткове колесо, що приводиться уручну, має механічне зачеплення з постійними магнітами приводного електродвигуна, які виконують роль зубців цівкової передачи. 2 UA 99509 C2 5 10 15 20 25 30 35 40 45 50 55 60 Конструкція запропонованого безпосереднього модульного електромеханічного приводу повороту башти військової гусеничної машини може бути спрощена, якщо магнітопровід статора приводного трансверсального електродвигуна буде виконаний у вигляді набору дискретних дугових елементів, мінімальна кількість яких принципово може бути рівна одному. На кресленнях, що ілюструють конструктивну суть запропонованої військової гусеничної машини з модульним повноприводним електромеханічним рушієм, представлені: Фіг. 1. Електричний двигун трансверсальної конструкції, поперечний розріз; Фіг. 2. Конструкція трансверсального двигуна, пристосована для застосування в електроприводі повороту башти при подачі живлення на верхній елемент якірної обмотки, поперечний розріз; Фіг. 3. Конструкція трансверсального двигуна, пристосована для застосування в електроприводі повороту башти при подачі живлення на нижній елемент якірної обмотки, поперечний розріз; Фіг. 4. Трансверсальний двигун при подачі живлення на верхній елемент якірної обмотки, вигляд зверху; Фіг. 5. Трансверсальний двигун при подачі живлення на нижній елемент якірної обмотки, вигляд зверху; Фіг. 6. Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти при вертикальному кріпленні кільцевого Ш-подібного магнітопроводу статора усередині корпусу гусеничної машини, поперечний розріз башти і корпусу; Фіг. 7. Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти при похилому кріпленні кільцевого Ш-подібного магнітопроводу статора усередині корпусу гусеничної машини, поперечний розріз башти і корпусу; Фіг. 8. Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти при горизонтальному кріпленні кільцевого Ш-подібного магнітопроводу статора усередині корпусу гусеничної машини, поперечний розріз башти і корпусу; Фіг. 9. Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти при горизонтальному кріпленні кільцевого Ш-подібного магнітопроводу статора поза корпусом гусеничної машини, поперечний розріз башти і корпусу. На фігурах 1, 2 і 3 в поперечному розрізі представлена конструктивна схема трансверсального електричного двигуна, Ш-подібний магнітопровід 1 статора якого жорстко закріплений на циліндрі 2, встановленому на нерухомому валу 3. Нерухомий вал 3 прикріплений до корпусу 4 військових броньованих гусеничних машини. У двох пазах Шподібного магнітопроводу 1 розміщені кільцеві якірні обмотки 5, підключені до бортової живлячої мережі за допомогою провідників, що підводять, 6. Ш-подібний магнітопровід 1 виконаний у вигляді набору розміщених на зовнішній поверхні циліндра 2 статори П-подібних шихтованих феромагнітних модулів 7. Схема установки цих модулів у вигляді зверху приведена на фігурах 4 і 5 для верхньої і нижньої кільцевих обмоток 5 якорів, відповідно. Як випливає з приведених конструктивних схем, магнітопроводи 7 нижнього ряду зрушені по колу щодо магнітопроводів 7 верхнього ряду на половину полюсного ділення. При подачі живлення на верхню кільцеву обмотку 5 статора набір верхніх високоенергетичних постійних магнітів 8, жорстко закріплених на внутрішній поверхні феромагнітного циліндра 9 ротора займе положення, показане на фіг. 4. При відключенні верхньої якірної обмотки 5 і подачі живлення на нижню якірну обмотку 5 нижній ряд постійних магнітів буде зафіксований в положенні, показаному на фіг. 5. Далі, при повторенні порядку почергового підключення якірних обмоток 5 цикл зсуву магнітів 8 повторюється. Напрям обертання ротора показаний на фігурах 4 і 5 стрілкою. На фіг. 6 приведена конструктивна схема запропонованої військової гусеничної машини з безпосереднім модульним електромеханічним приводом повороту башти у вигляді поперечного розрізу башти 10 з елементом 11 корпусів. Шихтовані феромагнітні модульні паралелепіпеди 12 закріплені на зовнішній поверхні кругового магнітопроводу 13 статора, який має прямокутний поперечний перетин і вертикально закріплений на кронштейні 14. Останній жорстко прикріплений до броньових листів 11 корпусів військової гусеничної машини. На верхньому погоні 15 башт вертикально закріплений феромагнітний магнітопровід 16 ротора приводного електродвигуна повороту башти. На зовнішньому магнітопроводі 16 встановлений комплект постійних магнітів 8, звернених до магнітопроводів 12. На фіг. 7 представлений варіант конструктивного виконання запропонованої військової гусеничної машини з безпосереднім модульним електромеханічним приводом повороту башти так само у вигляді поперечного розрізу башти з елементом 11 корпусів, що відрізняється від 3 UA 99509 C2 5 10 15 20 25 30 попереднього тим, що магнітопровід 13 статора двигуна, несе комплект якірних обмоток 5, закріплений на кронштейні 14 під гострим кутом до горизонту. Як випливає з фіг. 7, під таким же кутом нахилений до горизонту броньовий лист 18 башти 10. На броньовому листі 18 по кругу закріплений комплект постійних магнітів 8. Завдяки виникненню електромагнітного зусилля одностороннього тяжіння між статором 13 приводного трансверсального електродвигуна і магнітами 8 вторинного елемента цього двигуна відбувається силове розвантаження опорного підшипникового вузла 19 башт гусеничної машини, що збільшує термін його безаварійної експлуатації. На фіг. 8 і 9 представлені конструктивні варіанти пропонованої військової гусеничної машини з безпосереднім модульним електромеханічним приводом повороту башти, засновані на горизонтальному розташуванні магнітопроводу 13 статора приводного двигуна при закріпленні цього магнітопроводу зовні і усередині корпусу військової гусеничної машини, відповідно. Повністю очевидно, що при такій конструктивній компоновці активних елементів приводного електродвигуна досягнутий максимальний ступінь силового розвантаження опорного підшипникового вузла 19. Для здійснення повороту башти при втраті електричного живлення запропоновано доповнити електропривод цівковою механічною передачею з використанням постійних магнітів приводного електродвигуна як зубців вказаної передачі. Статор приводного двигуна повороту башти так само може бути виконаний у вигляді набору дискретних кільцевих конструктивних елементів, що приводить до зменшення маси, а, отже, і вартості пропонованого електроприводу повороту башти. Пропонована військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти працює таким чином. Електрична енергія, створена бортовим генератором у вигляді, наприклад, електричної машини, що обертається, приводиться двигуном внутрішнього згорання або газовою турбіною, або отримана від електрохімічних джерел у вигляді акумуляторів, суперконденсаторів або паливних елементів, перетвориться до вигляду, придатного для споживання приводним електричним двигуном повороту башти військової гусеничної машини. Потім, по команді внутрішнього або зовнішнього оператора або автоматичної системи, що управляє, імпульси живлячої напруги по черзі подаються на елементи якірної обмотки 5 приводного двигуна. Башта приводиться в обертання і позиціонується в заданому напрямі стрілянини. Швидкість обертання приводного двигуна регулюється зміною частоти імпульсів живлячої напруги, що подається на елементи кільцевої якірної обмотки 5. Для зміни напряму обертання башти необхідно змінити порядок чергування імпульсів напруги живлення. 35 ФОРМУЛА ВИНАХОДУ 40 45 50 55 1. Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти, що містить броньований корпус, усередині якого розміщені один або декілька джерел енергії і її перетворювачів, гарматна башта з артилерійським і стрілецьким озброєнням, закріплена на корпусі з можливістю електромеханічного повороту навколо вертикальної осі, і що знаходиться поза корпусом закріплений на ньому гусеничний рушій, яка відрізняється тим, що як електромеханічний приводний силовий елемент повороту башти застосований електродвигун трансверсального типу, постійні магніти збудження основного магнітного поля якого рівномірно закріплені по всьому колу корпусу гарматної башти, а статор з якірними обмотками управління жорстко прикріплений до елементів внутрішньої або зовнішньої поверхні корпуса. 2. Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти за п. 1, яка відрізняється тим, що магнітопровід статора приводного трансверсального електричного двигуна виконаний у вигляді суцільної кільцевої конструкції Шподібного поперечного перерізу і вертикально закріплений на горизонтальному кільцевому майданчику, встановленому на кронштейнах, жорстко прикріплених до внутрішньої поверхні корпусу військової гусеничної машини, причому постійні магніти вказаного приводного двигуна закріплені на вертикальному феромагнітному кільці, яке закріплене на верхньому погоні башти. 3. Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти за п. 1, яка відрізняється тим, що магнітопровід статора приводного трансверсального електричного двигуна виконаний у вигляді суцільної кільцевої конструкції Шподібного поперечного перерізу, встановленої під кутом до горизонту на вертикальних кронштейнах, закріплених на внутрішній поверхні корпусу військової гусеничної машини, 4 UA 99509 C2 5 10 15 причому постійні магніти вказаного приводного двигуна закріплені під таким же кутом нахилу до горизонту на внутрішній поверхні башти. 4. Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти за п. 1, яка відрізняється тим, що кільцевий Ш-подібний магнітопровід статора приводного трансверсального електродвигуна встановлений горизонтально на суцільному кільцевому Г-подібному кронштейні, закріпленому на зовнішній поверхні корпусу поза гарматною баштою військової гусеничної машини, причому комплект постійних магнітів двигуна так само розміщений горизонтально і жорстко встановлений на горизонтальному кільці верхнього погона башти. 5. Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти за пп. 1, 2, 3, і 4, яка відрізняється тим, що електричний привід доповнений цівковим механічним приводом, в якому приводне колесо має механічне зачеплення з постійними магнітами приводного електродвигуна. 6. Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти за пп. 1, 2, 3, і 4, яка відрізняється тим, що магнітопровід статора приводного трансверсального електродвигуна виконаний у вигляді набору дискретних дугових елементів, мінімальна кількість яких може бути рівна одному. 5 UA 99509 C2 6 UA 99509 C2 7 UA 99509 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюMilitary caterpillar machine with direct modular electromechanical turret traverse drive
Автори англійськоюBelikov Viktor Tryfonovych, Borysiuk Mykhailo Demianovych, Diachenko Oleksandr Feodosiovych, Leschenko Oleh Ivanovych, Maheramov Liutfalii Kurban-Aliievych, Popovichenko Oleksandr Viktorovych
Назва патенту російськоюВоенная гусеничная машина с непосредственным модульным электромеханическим приводом поворота башни
Автори російськоюБеликов Виктор Трифонович, Борисюк Михаил Демьянович, Дьяченко Александр Феодосиевич, Лещенко Олег Иванович, Магерамов Лютфалий Курбан-Алиевич, Поповиченко Александр Викторович
МПК / Мітки
МПК: F41A 27/00, F41H 7/00
Мітки: башти, безпосереднім, гусенична, машина, електромеханічним, військова, повороту, модульним, приводом
Код посилання
<a href="https://ua.patents.su/10-99509-vijjskova-gusenichna-mashina-z-bezposerednim-modulnim-elektromekhanichnim-privodom-povorotu-bashti.html" target="_blank" rel="follow" title="База патентів України">Військова гусенична машина з безпосереднім модульним електромеханічним приводом повороту башти</a>
Військова гусенична машина з модульним повноприводним електромеханічним рушієм
Номер патенту: 94824
Опубліковано: 10.06.2011
Автори: Магерамов Лютфалій Курбан-Алієвич, Дяченко Олександр Феодосійович, Поповіченко Олександр Вікторович, Беліков Віктор Тріфонович, Борисюк Михайло Дем'янович, Лещенко Олег Іванович
Мітки: модульним, рушієм, повноприводним, військова, гусенична, машина, електромеханічним
Формула / Реферат:
1. Військова гусенична машина з модульним повноприводним електромеханічним рушієм, що містить броньований корпус, усередині якого розміщені один або декілька джерел енергії, і закріплений на корпусі гусеничний рушій, який знаходиться поза корпусом і складається з пари гусениць, розміщених по обидві сторони корпусу на колесах, щонайменше одна пара яких приводиться в рух силовими елементами, яка відрізняється тим, що як приводні силові...
Склоочисник транспортних засобів з лінійним модульним електромеханічним приводом
Номер патенту: 94669
Опубліковано: 25.05.2011
Автори: Беліков Віктор Тріфонович, Толстой Олексій Володимирович, Поповіченко Олександр Вікторович, Васильєв Валерій Валентинович
МПК: B60S 1/00
Мітки: засобів, транспортних, склоочисник, лінійним, приводом, електромеханічним, модульним
Формула / Реферат:
1. Склоочисник транспортних засобів з лінійним модульним електромеханічним приводом, що складається з щіткотримача у вигляді жорсткого стрижня, в пазах якого, звернених до поверхні скла транспортного засобу, закріплено одна або декілька гнучких щіток, встановлених з можливістю ковзання по поверхні скла, що очищається, і встановленого на корпусі транспортного засобу приводного електричного двигуна, рухомий елемент якого механічно пов'язаний з...
Військова гусенична машина з електрохімічною енергетичною установкою
Номер патенту: 83016
Опубліковано: 10.06.2008
Автори: Розвод Руслан Степанович, Дяченко Олександр Феодосійович, Борисюк Михайло Дем'янович, Бєліков Віктор Трифонович, Головань Вячеслав Грігорійович
МПК: F41H 7/00
Мітки: установкою, машина, військова, електрохімічною, енергетичною, гусенична
Формула / Реферат:
1. Військова гусенична машина з електрохімічною енергосиловою установкою, що складається з корпусу, енергосилової установки, електромеханічної трансмісії та гусеничної ходової частини, яка відрізняється тим, що енергосилова установка складається з електрохімічного генератора та блока накопичувачів електроенергії.2. Військова гусенична машина з електрохімічною енергосиловою установкою за п. 1, яка відрізняється тим, що блок...
Механізм повороту башти танка
Номер патенту: 50875
Опубліковано: 15.11.2002
Автори: Синюгін Анатолій Михайлович, Андрус Сергій Григорович, Гутніченко Євген Опанасович
МПК: F41A 27/00
Мітки: башти, повороту, танка, механізм
Формула / Реферат:
1. Механізм повороту башти танка, що містить два вали, вихідне люфтовибиральне колесо, з'єднане з шестірнею, яка кінематично зв'язана з валом виконавчого двигуна і з ручним приводом, який відрізняється тим, що люфтовибиральне колесо встановлене на ексцентриковій осі, шестірня встановлена на першому валу і з'єднана із зубчастим вінцем, виконаним на валу виконавчого двигуна за допомогою конічної передачі, конічне колесо якої встановлене на...
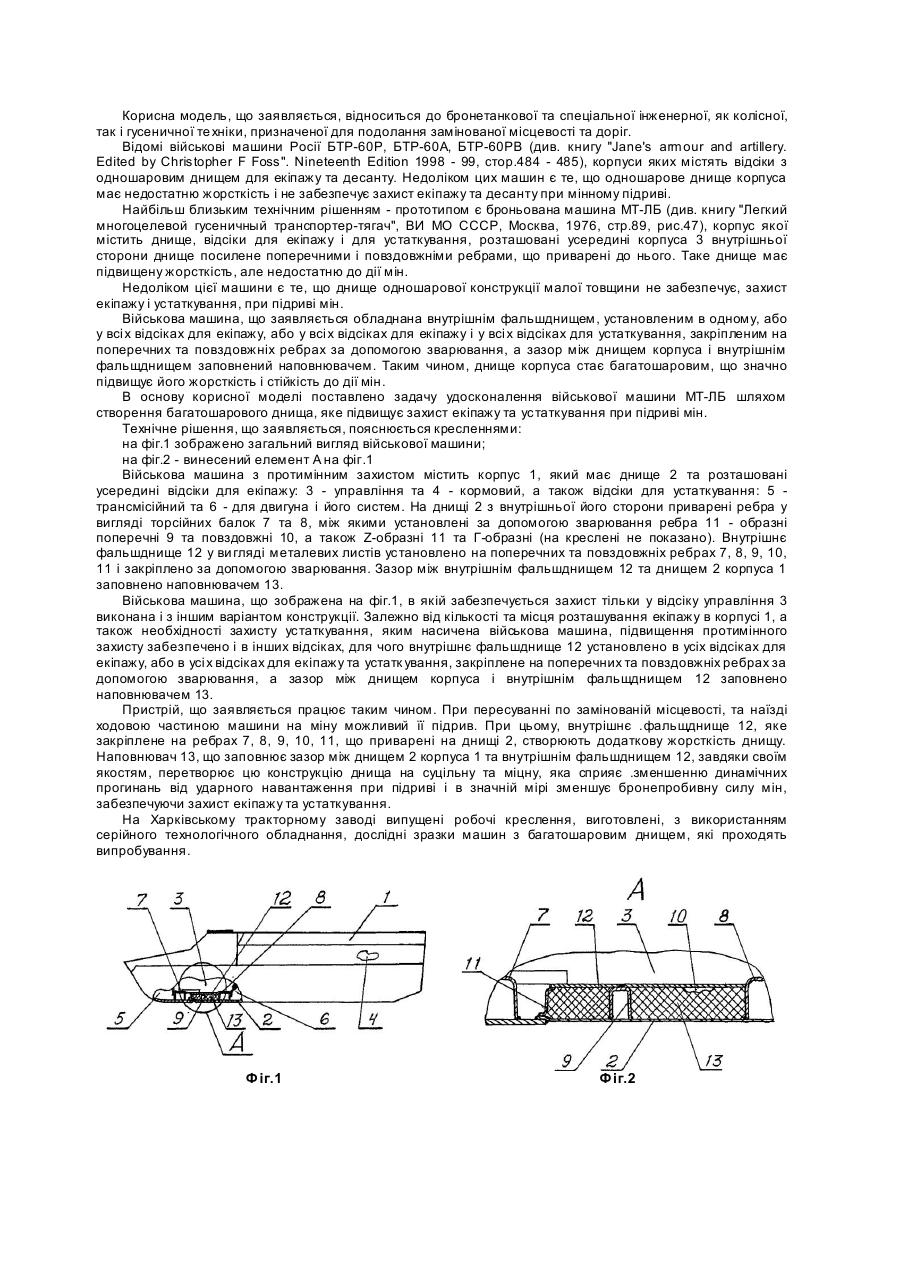
Військова машина з протимінним захистом
Номер патенту: 1698
Опубліковано: 17.03.2003
Автори: Щербак Сергій Борисович, Писаренко Анатолій Євменович, Балюк Анатолій Леонтійович
МПК: F41H 7/00
Мітки: захистом, військова, протимінним, машина
Формула / Реферат:
1. Військова машина з протимінним захистом, що містить корпус з днищем, відсіки для екіпажу та для устаткування, поперечні і повздовжні ребра, що приварені з внутрішньої сторони днища, яка відрізняється тим, що вона обладнана внутрішнім фальшднищем, установленим у відсіку керування для екіпажу, закріпленим на поперечних та повздовжніх ребрах за допомогою зварювання, а зазор між днищем корпуса і внутрішнім фальшднищем заповнений...
Попередній патент: Спосіб відкритої розробки горизонтальних і пологих кар’єрів корисних копалин
Наступний патент: Комбінація біс-тіазолієвої солі або одного з її попередників і артемізиніну і одного з його похідних для лікування важкої форми малярії
Випадковий патент: Спосіб діагностики прихованих форм сифілісу