Пристрій розпізнавання радіолокаційних об’єктів
Номер патенту: 9978
Опубліковано: 30.09.1996
Автори: Кулько Аркадій В'ячеславович, Новіков Володимир Пилипович, Берека Валерій Веніамінович, Гребенюк Андрій Юрійович



Формула / Реферат
Устройство распознавания радиолокационных объектов, содержащее N каналов обработки, каждый из которых включает блок задержки, приемник и ключ, причем информационные выходы первых блоков сдвигающих регистров соединены с адресными входами блоков постоянных запоминающих устройств, информационные выходы которых соединены с соответствующими входами вторых блоков сдвигающих регистров, выходы которых соединены с соответствующими входами блока устройств выбора максимума, последовательно соединенные вторые блоки сумматоров, устройство выбора максимума, блок логических элементов ИЛИ и индикатор, причем вход блока задержки соединен с входом синхронизации первых блоков сдвигающих регистров, входы установки в нуль которых объединены и соединены с выходом установки в нуль блока управления, выход блока задержки соединен с объединенными входами синхронизации вторых блоков сдвигающих регистров, вторые входы ключей каналов обработки объединены и соединены с вторым выходом блока управления, входы фазирования приемников объединены и соединены с первым выходом блока управления, первый вход блока управления соединен с шиной импульса запуска передатчика РЛС, выходы кодов дальности целей и ширины стробов блока управления соединены с интерфейсной шиной РЛС, отличающееся тем, что в него дополнительно введены N блоков фазовой обработки, N блоков схем выбора максимума и N формирователей квадратурных составляющих, причем входы блоков формирователей квадратурных составляющих соединены с соответствующими выходами ключей, а выходы соединены с информационными входами первых блоков сдвигающих регистров и с информационными входами блоков фазовой обработки, выходы которых соединены с соответствующими первыми входами блоков схем выбора максимума, вторые входы которых соединены с соответствующими выходами блоков устройств выбора максимума, соответствующие выходы блоков схем выбора максимума соединены с соответствующими входами вторых блоков сумматоров, причем первые входы блоков фазовой обработки соединены с входом синхронизации первых блоков сдвигающих регистров, а вторые входы с входом установки в нуль первых блоков сдвигающих регистров, входы установки в нуль которых объединены и соединены с входами установки в нуль вторых блоков сдвигающих регистров, при этом шины синхронизирующих сигналов блоков формирования квадратурных составляющих объединены и соединены с шиной синхронизации блока управления, причем информационный выход приемника соединен с информационным входом ключа.
Текст
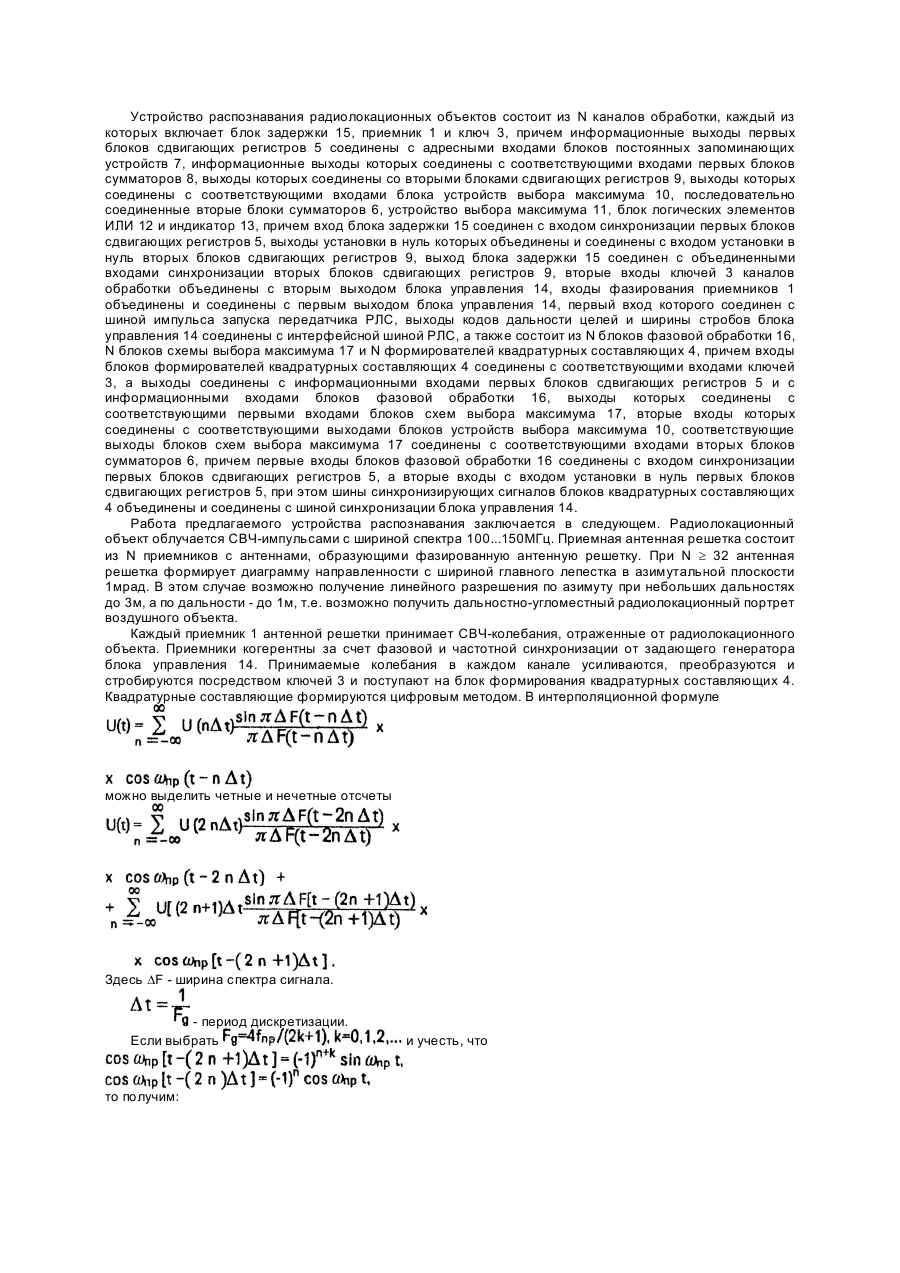
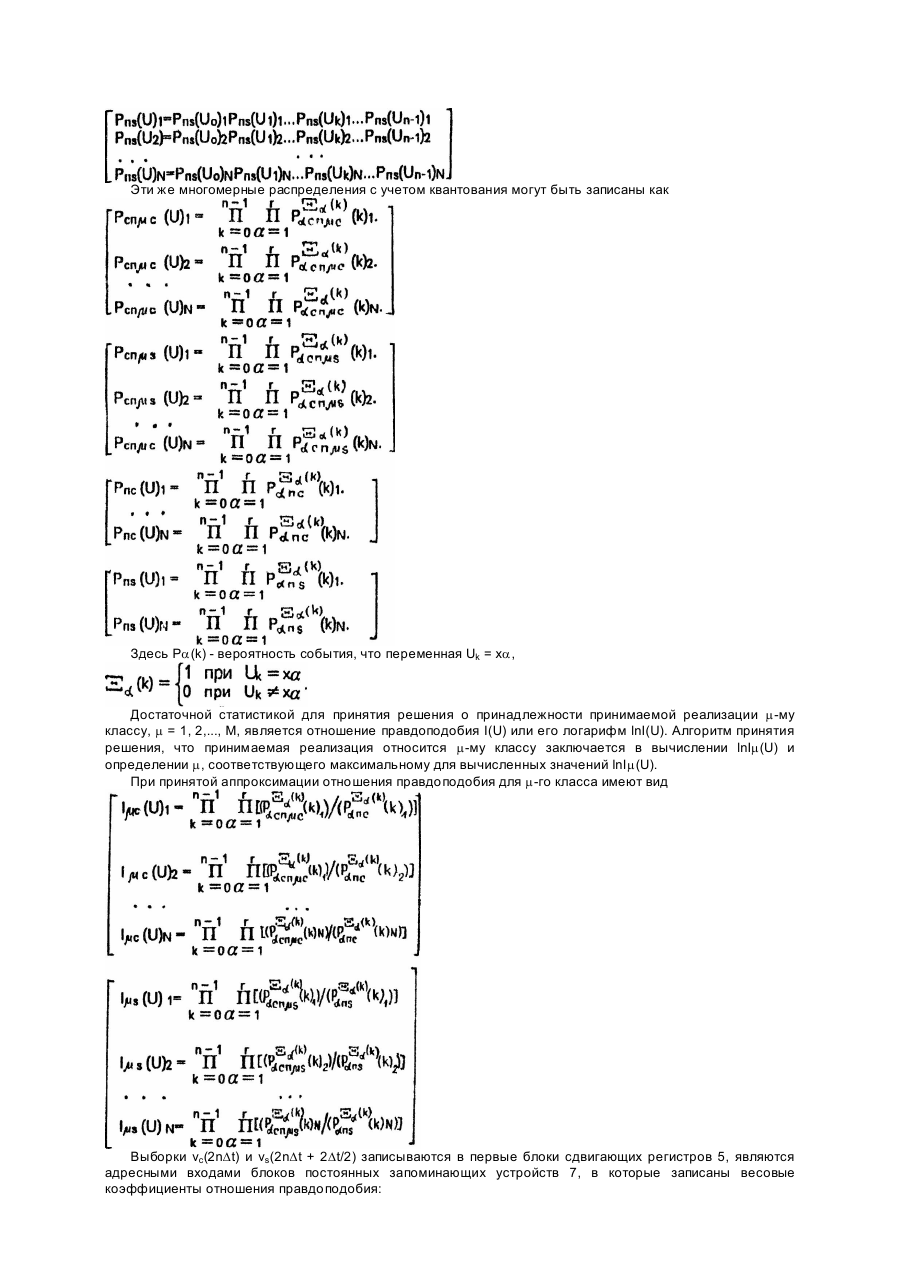
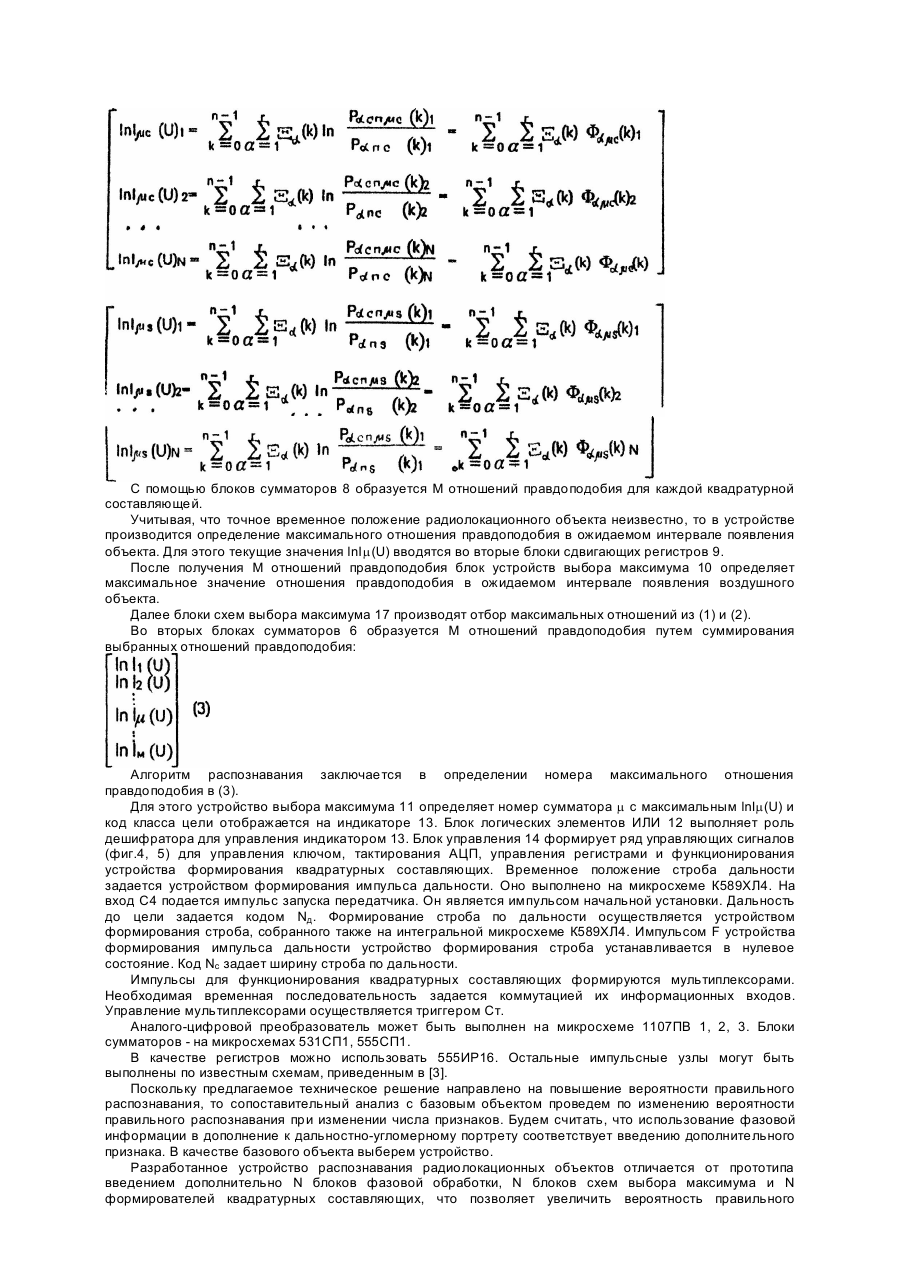
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС) с широкополосными линейно частотно-модулированными (ЛЧМ) сигналами и фазированной антенной решеткой для обработки радиолокационные сигналов в интересах распознавания классов воздушных объектов. Наиболее близким техническим решением к изобретению является устройство для распознавания радиолокационных целей, содержащее N каналов обработки, каждый из которых включает в себя: блок задержки, последовательно соединенные приемник, детектор, ключ, АЦП и первые блоки сдвигающих регистров, причем информационные выходы первых блоков сдвигающих регистров соединены с адресными входами блоков постоянных запоминающих устройств (ПЗУ), информационные выходы которых соединены с соответствующими входами первых блоков сумматоров, выходы которых соединены с соответствующими входами вторых блоков сдвигающих регистров, входы которых соединены с соответствующими входами блока устройств выбора максимума, последовательно соединенных устройства выбора максимума, блок логических элементов ИЛИ и индикатор, причем вход блока задержки соединен с тактирующим входом АЦП и входом синхронизации вторых блоков сдвигающих регистров, входы установки в нуль которых объединены и соединены с выходом установки в нуль первых блоков сдвигающих регистров, при этом выходы блоков устройств выбора максимума каналов обработки соединены с соответствующими входами блоков сумматоров, выходы которых соединены с входами устройств выбора максимума, кроме того, тактирующие входы АЦП каналов обработки объединены с первым выходом блока управления, вторые входы ключей каналов обработки объединены и соединены с вторым выходом блока управления, входы фазирования приемников объединены и соединены с первым выходом блока управления, входы установки в нуль первых блоков сдвигающих регистров каналом обработки объединены и соединены с четвертым выходом блока управления, первый вход блока управления соединен с шиной импульса запуска передатчика РЛС, выходы кодов дальности цели и ширины строба блока управления соединены с интерфейсной шиной РЛС. Работа известного устройства распознавания радиолокационных сигналов заключается в следующем: Цель облучается СВЧ импульсами с полосой спектра Df = 100... 150МГц. Элемент разрешения по дальности - порядка 1м. Приемная антенная решетка состоит из N приемников с антеннами, образующими фазированную антенную решетку с расстояниями между облучателями примерно 1м. При N ³ 32 антенная решетка формирует диаграмму направленности с шириной главного лепестка в азимутальной плоскости 1мрад. В этом случае возможно получение линейного разрешения по азимуту - 3м при небольших дальностях. Каждый приемник антенной решетки принимает высокочастотное колебание, отраженное от цели. Приемники когерентны за счет фазовой и частотной синхронизации от задающего генератора блока управления. Принимаемые колебания в каждом канале усиливаются, преобразуются, и на выходе детекторов формируются радиолокационные портреты. Они подвергаются аналого-цифровому преобразованию, результаты которого записываются в блоки сдвигающих регистров. Таким образом, на выходах приемников формируется дальностно-азимутальный радиолокационный портрет. Последовательность дискретных переменных Uk, k = 0, 1,..., n-1, на выходах аналого-цифровых преобразователей, принимающих значения xa, a = 1, 2,…, r, при независимых отсчетах можно аппроксимировать неоднородными n = 0 - связными цепями Маркова с r - состояниями. Здесь n - число отсчетов радиолокационного портрета в стробе дальности. В этом случае многомерные распределения вероятностей, радиолокационного портрета с шумом для m-го класса, m = 1, 2,..., M и шума можно записать следующим образом: Эти многомерные распределения с учетом квантования в аналого-цифровых преобразователях записываются как Здесь Pa(k) - вероятность события, что переменная Uk = xa; Достаточной статистикой для принятия решения о принадлежности принимаемой реализации к m-му классу, m = 1, 2,..., M, является отношение правдоподобия I(U) или его логарифм lnI(U). Алгоритм принятия решения, что принимаемая реализация относится m-му классу заключается в вычислении lnIm(U) и определения m, соответствующего максимальному из вычисленных значений lnIm(U). При принятой аппроксимации отношения правдоподобия для m-го класса имеют вид: Логарифмы отношений правдоподобия можно записать, как Выборки Uk с выходов аналого-цифровых преобразователей записываются в первые блоки сдвигающих регистров. Разрядные выходы блоков сдвигающих регистров являются адресными входами блоков постоянных запоминающих устройств, в которых записаны весовые коэффициенты В j-ом канале в каждом из n постоянных запоминающих устройств хранятся 2nx разрядных весов для m-го класса. Здесь nx - разрядность аналого-цифровых преобразователей. Весовые коэффициенты вычисляются по обучающей выборке. С помощью блоков сумматоров образуется M отношений правдоподобия для M классов радиолокационных целей. Учитывая, что точное временное положение цели неизвестно, то в устройстве производится определение максимального отношения правдоподобия в ожидаемом интервале появления цели. Для этого текущие значения lnIm(U) вводятся во вторые блоки сдвигающих регистров. После получения M отношений правдоподобия блок устройств выбора максимума 10 определяет максимальное значение отношения правдоподобия в ожидаемом интервале появления цели, которые подаются на вторые блоки сумматоров. Путем суммирования по N в матрице во вторых блоках сумматоров образуется M отношений правдоподобия Алгоритм распознавания заключается в определении номера максимального отношения правдоподобия. Для этого устройство выбора максимума определяет номер сумматора m с максимальным lnIm(U) и код класса цели отображается на индикаторе. Блок элементов ИЛИ выполняет роль дешифратора для управления индикатором. В данном устройстве используется информация о радиолокационной цели в виде дальностного и угломестного радиолокационного портрета. Однако вероятность правильного распознавания можно повысить, если использовать фазовую информацию отраженных сигналов. Таким образом, недостатком известного устройства является недостаточно высокий показатель качества правильного распознавания из-за неиспользования фазовой информации. Задачей изобретения является повышение вероятности правильного распознавания за счет использования фазовой информации отраженных сигналов. Поставленная задача достигается тем, что в известное устройство, содержащее N каналов обработки, каждый из которых включает блок задержки, приемник, ключ, причем информационные выходы первых блоков сдвигающих регистров соединены с адресными входами блоков постоянных запоминающих устройств, информационные выходы которых соединены с соответствующими входами первых блоков сумматоров, выходы которых соединены с соответствующими входами вторых блоков сдвигающих регистров, выходы которых соединены с соответствующими входами блока устройств выбора максимума, последовательно соединенные вторые блоки сумматоров, устройство выбора максимума, блок логических элементов ИЛИ и индикатор, причем вход блока задержки соединен с входом синхронизации первых блоков сдвигающих регистров, выход блока задержки соединен с объединенными входами синхронизации вторых блоков сдвигающих регистров, вторые входы ключей каналов обработки объединены и соединены с вторым входом блока управления, входы фазирования приемников объединены и соединены с первым входом блока управления, первый вход блока управления соединен с шиной импульса запуска передатчика РЛС, выходы кодов дальности цели и ширины стробов блока управления соединены с интерфейсной шиной РЛС. дополнительно введены N блоков фазовой обработки, N блоков схем выбора максимума и N формирователей квадратурных составляющих, причем входы блоков формирователей квадратурных составляющих соединены с соответствующими выходами ключей, а выходы соединены с информационными входами первых блоков сдвигающих регистров и с информационными входами блоков фазовой обработки, выходы которых соединены с соответствующими первыми входами блоков схем выбора максимума, вторые входы которых соединены с соответствующими выходами блоков устройств выбора максимума, соответствующие выходы блоков схем выбора максимума соединены с соответствующими входами вторых блоков сумматоров, причем первые входы блоков фазовой обработки соединены с входом синхронизации первых блоков сдвигающих регистров, а вторые входы с входом установки в нуль первых блоков сдвигающих регистров, входы установки в нуль которых объединены и соединены с входом установки в нуль блока управления и входом установки в нуль вторых блоков сдвигающих регистров, при этом шины синхронизирующих сигналов блоков формирования квадратурных составляющих объединены и соединены с шиной синхронизации блока управления. На фиг.1 представлена структурная схема устройства распознавания. На фиг.2 приведена структурная схема блока фазовой обработки. На фиг.3 представлена структурная схема блока формирования квадратурных составляющих. На фиг.4 приведена структурная схема блока управления. На фиг.5 приведены эпюры напряжений блока управления. Устройство распознавания радиолокационных объектов содержит (см. фиг.1): приемник 1, ключ 3, блок формирования квадратурных составляющих 4, первые блоки сдвигающих регистров 5, вторые блоки сумматоров 6, блоки постоянных запоминающих устройств 7, первые блоки сумматоров 8, вторые блоки сдвигающих регистров 9, блок устройств выбора максимума 10, устройство выбора максимума 11, блок логических элементов ИЛИ 12, индикатор 13, блок управления 14, блок задержки 15, блок фазовой обработки 16, блоки схем выбора максимума 17. Устройство распознавания радиолокационных объектов состоит из N каналов обработки, каждый из которых включает блок задержки 15, приемник 1 и ключ 3, причем информационные выходы первых блоков сдвигающих регистров 5 соединены с адресными входами блоков постоянных запоминающих устройств 7, информационные выходы которых соединены с соответствующими входами первых блоков сумматоров 8, выходы которых соединены со вторыми блоками сдвигающих регистров 9, выходы которых соединены с соответствующими входами блока устройств выбора максимума 10, последовательно соединенные вторые блоки сумматоров 6, устройство выбора максимума 11, блок логических элементов ИЛИ 12 и индикатор 13, причем вход блока задержки 15 соединен с входом синхронизации первых блоков сдвигающих регистров 5, выходы установки в нуль которых объединены и соединены с входом установки в нуль вторых блоков сдвигающих регистров 9, выход блока задержки 15 соединен с объединенными входами синхронизации вторых блоков сдвигающих регистров 9, вторые входы ключей 3 каналов обработки объединены с вторым выходом блока управления 14, входы фазирования приемников 1 объединены и соединены с первым выходом блока управления 14, первый вход которого соединен с шиной импульса запуска передатчика РЛС, выходы кодов дальности целей и ширины стробов блока управления 14 соединены с интерфейсной шиной РЛС, а также состоит из N блоков фазовой обработки 16, N блоков схемы выбора максимума 17 и N формирователей квадратурных составляющих 4, причем входы блоков формирователей квадратурных составляющих 4 соединены с соответствующими входами ключей 3, а выходы соединены с информационными входами первых блоков сдвигающих регистров 5 и с информационными входами блоков фазовой обработки 16, выходы которых соединены с соответствующими первыми входами блоков схем выбора максимума 17, вторые входы которых соединены с соответствующими выходами блоков устройств выбора максимума 10, соответствующие выходы блоков схем выбора максимума 17 соединены с соответствующими входами вторых блоков сумматоров 6, причем первые входы блоков фазовой обработки 16 соединены с входом синхронизации первых блоков сдвигающих регистров 5, а вторые входы с входом установки в нуль первых блоков сдвигающих регистров 5, при этом шины синхронизирующих сигналов блоков квадратурных составляющих 4 объединены и соединены с шиной синхронизации блока управления 14. Работа предлагаемого устройства распознавания заключается в следующем. Радиолокационный объект облучается СВЧ-импульсами с шириной спектра 100...150МГц. Приемная антенная решетка состоит из N приемников с антеннами, образующими фазированную антенную решетку. При N ³ 32 антенная решетка формирует диаграмму направленности с шириной главного лепестка в азимутальной плоскости 1мрад. В этом случае возможно получение линейного разрешения по азимуту при небольших дальностях до 3м, а по дальности - до 1м, т.е. возможно получить дальностно-угломестный радиолокационный портрет воздушного объекта. Каждый приемник 1 антенной решетки принимает СВЧ-колебания, отраженные от радиолокационного объекта. Приемники когерентны за счет фазовой и частотной синхронизации от задающего генератора блока управления 14. Принимаемые колебания в каждом канале усиливаются, преобразуются и стробируются посредством ключей 3 и поступают на блок формирования квадратурных составляющих 4. Квадратурные составляющие формируются цифровым методом. В интерполяционной формуле можно выделить четные и нечетные отсчеты Здесь DF - ширина спектра сигнала. - период дискретизации. Если выбрать то получим: и учесть, что Сравнивая с полученным выражением, получим Следовательно, квадратурные составляющие могут быть сформированы путем отнесения четных выборок к синусной составляющей, а нечетных - к косинусной. Причем, знаки четных выборок косинусной и нечетных синусной составляющих надо изменить на обратные. Отнесение четных и нечетных выборок соответственно к синусной и косинусной составляющим осуществляется путем поочередной записи выборок с выхода аналого-цифрового преобразователя в регистры 18 и 19 (см. фиг.3). В полученных составляющих формируется знаковый разряд. Формирование осуществляется первым 20 и вторым 21 компараторами. В компараторах осуществляется сравнение текущей выборки Ak с A0. Здесь A0 - код, соответствующий средине характеристики преобразования аналого-цифрового преобразователя. Для четных выборок косинусной составляющей. если Ak > A0, то на выходе в знаковом разряде формируется уровень логической единицы. Если же Ak A0, то знаковый разряд равен уровню логического нуля, в противном случае - уровню логической единицы. Для нечетных выборок с синусной составляющей выполняется следующий алгоритм формирования знакового разряда: Для нечетных выборок синусной составляющей знаковый разряд формируется по условию: Данные логические операции выполняются посредством логических элементов 22, 23, 24, 25 и 26, 27, 28, 29. Логические элементы 23, 25, 27, 29 имеют третье (высокоимпедансное) состояние. Это позволяет объединить их выходы. Управление их состоянием осуществляется импульсами с блока управления 14. Последовательности дискретных переменных vc(2nDt) и vs(2nDt + 2Dt/2), принимающих значение xa, a = 1, 2,..., r можно аппроксимировать неоднородными нуль-связными цепями Маркова с r - состояниями. Здесь r - число уровней квантования АЦП. В этом случае многомерные распределения вероятностей квадратурных составляющих радиолокационного портрета с шумом для m-го класса m = 1, 2,..., M и шума можно записать следующим образом: Эти же многомерные распределения с учетом квантования могут быть записаны как Здесь Pa(k) - вероятность события, что переменная Uk = xa, Достаточной статистикой для принятия решения о принадлежности принимаемой реализации m-му классу, m = 1, 2,..., M, является отношение правдоподобия I(U) или его логарифм lnI(U). Алгоритм принятия решения, что принимаемая реализация относится m-му классу заключается в вычислении lnIm(U) и определении m, соответствующего максимальному для вычисленных значений lnIm(U). При принятой аппроксимации отношения правдоподобия для m-го класса имеют вид Выборки vc(2nDt) и vs(2nDt + 2Dt/2) записываются в первые блоки сдвигающих регистров 5, являются адресными входами блоков постоянных запоминающих устройств 7, в которые записаны весовые коэффициенты отношения правдоподобия: С помощью блоков сумматоров 8 образуется M отношений правдоподобия для каждой квадратурной составляющей. Учитывая, что точное временное положение радиолокационного объекта неизвестно, то в устройстве производится определение максимального отношения правдоподобия в ожидаемом интервале появления объекта. Для этого текущие значения lnIm(U) вводятся во вторые блоки сдвигающих регистров 9. После получения M отношений правдоподобия блок устройств выбора максимума 10 определяет максимальное значение отношения правдоподобия в ожидаемом интервале появления воздушного объекта. Далее блоки схем выбора максимума 17 производят отбор максимальных отношений из (1) и (2). Во вторых блоках сумматоров 6 образуется M отношений правдоподобия путем суммирования выбранных отношений правдоподобия: Алгоритм распознавания заключается в определении номера максимального отношения правдоподобия в (3). Для этого устройство выбора максимума 11 определяет номер сумматора m с максимальным lnIm(U) и код класса цели отображается на индикаторе 13. Блок логических элементов ИЛИ 12 выполняет роль дешифратора для управления индикатором 13. Блок управления 14 формирует ряд управляющих сигналов (фиг.4, 5) для управления ключом, тактирования АЦП, управления регистрами и функционирования устройства формирования квадратурных составляющих. Временное положение строба дальности задается устройством формирования импульса дальности. Оно выполнено на микросхеме К589ХЛ4. На вход C4 подается импульс запуска передатчика. Он является импульсом начальной установки. Дальность до цели задается кодом Nд. Формирование строба по дальности осуществляется устройством формирования строба, собранного также на интегральной микросхеме К589ХЛ4. Импульсом F устройства формирования импульса дальности устройство формирования строба устанавливается в нулевое состояние. Код Nc задает ширину строба по дальности. Импульсы для функционирования квадратурных составляющих формируются мультиплексорами. Необходимая временная последовательность задается коммутацией их информационных входов. Управление мультиплексорами осуществляется триггером Ст. Аналого-цифровой преобразователь может быть выполнен на микросхеме 1107ПВ 1, 2, 3. Блоки сумматоров - на микросхемах 531СП1, 555СП1. В качестве регистров можно использовать 555ИР16. Остальные импульсные узлы могут быть выполнены по известным схемам, приведенным в [3]. Поскольку предлагаемое техническое решение направлено на повышение вероятности правильного распознавания, то сопоставительный анализ с базовым объектом проведем по изменению вероятности правильного распознавания при изменении числа признаков. Будем считать, что использование фазовой информации в дополнение к дальностно-угломерному портрету соответствует введению дополнительного признака. В качестве базового объекта выберем устройство. Разработанное устройство распознавания радиолокационных объектов отличается от прототипа введением дополнительно N блоков фазовой обработки, N блоков схем выбора максимума и N формирователей квадратурных составляющих, что позволяет увеличить вероятность правильного распознавания. Для оценки изменения вероятности правильного распознавания воспользуемся графиком на с. 120 (Зимин Г.В. Справочник офицера ПВО. М., Военное изд-во, 1987г), при D = (m1 - m2)/2s = 0,75. Из графика видно, что при одном признаке вероятность правильного распознавания равна 0,7, а при двух - 0,85. Следовательно, ориентировочный анализ показывает, что использование фазовой информации в дополнение к дальностно-угломестному портрету позволяет повысить вероятность правильного распознавания минимум на 0,15 при заданном отношении сигнал/шум.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for recognition of radar objects
Автори англійськоюKulko Arkadii Viacheslavovych, Bereka Valerii Veniaminovych, Hrebeniuk Andrii Yuriiovych
Назва патенту російськоюУстройство распознавания радиолокационных объектов
Автори російськоюКулько Аркадий Вячеславович, Берека Валерий Вениаминович, Гребенюк Андрей Юрьевич
МПК / Мітки
МПК: G01S 13/78, G01S 13/02
Мітки: об'єктів, розпізнавання, радіолокаційних, пристрій
Код посилання
<a href="https://ua.patents.su/10-9978-pristrijj-rozpiznavannya-radiolokacijjnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій розпізнавання радіолокаційних об’єктів</a>
Пристрій множення елементів скінченних полів
Номер патенту: 4046
Опубліковано: 27.12.1994
Автори: Варіченко Леонід Вікторович, Кодров Віктор Іванович
МПК: G06F 7/52, G06F 7/49, G06F 7/496
Мітки: множення, елементів, полів, скінченних, пристрій
Формула / Реферат:
Устройство для умножения элементов конечных полей GF (2n), содержащее блок формирования частичных произведений, состоящий из n групп по n элементов И в каждой, (n-1) блоков матричного преобразования и блок суммирования, выходы которого соединены с выходом результата устройства, вход i-го разряда, (і = 1, ..., n) первого сомножителя которого соединен с объединенными первыми входами элементов И i-ой группы блока формирования частичных...
Спосіб розпізнавання симетричності зображень об’єктів і пристрій для його реалізації
Номер патенту: 3741
Опубліковано: 27.12.1994
Автори: Кожем'яко Володимир Прокопович, КРАСИЛЕНКО ВОЛОДИМИР ГРИГОРОВИЧ, Мартинюк Тетяна Борисівна, Буда Антоніна Георгіївна
МПК: G06K 11/00, G06K 9/58, G06K 9/52
Мітки: зображень, розпізнавання, пристрій, спосіб, об'єктів, симетричності, реалізації
Формула / Реферат:
1. Способ распознавания симметричности изображений объектов, включающий формирование светового потока исходного изображения в неподвижной системе координат с первой и второй ортогональными осями, разделение сформированного светового потока на два одинаковых равноинтенсивных световых потока, пространственную модуляцию первого и второго разделенных световых потоков вдоль одноименной координатной оси с симметрией относительно другой...
Пристрій для формування залишків по модулю
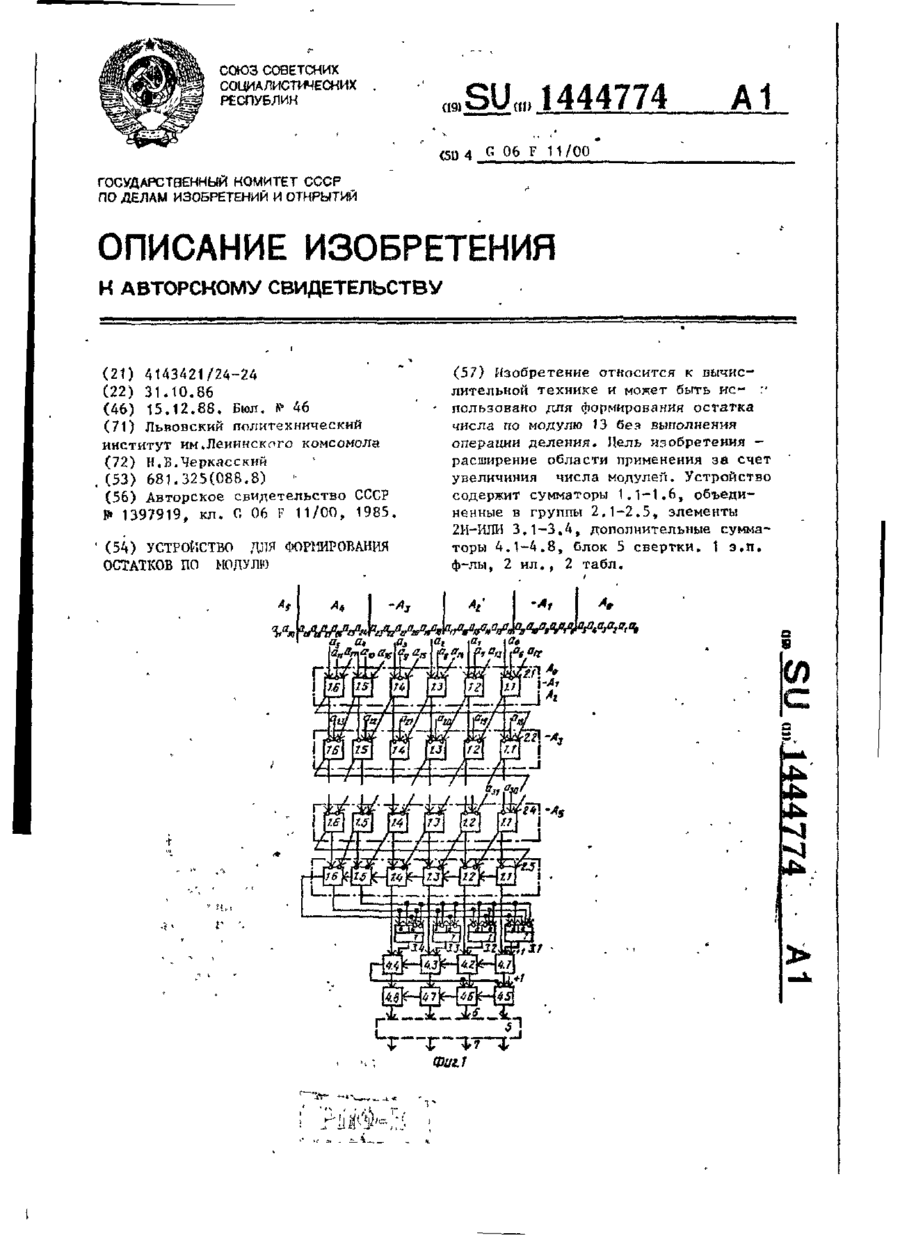
Номер патенту: 614
Опубліковано: 15.12.1993
Автор: Черкаський Микола Вячеславович
МПК: G06F 7/60, G06F 11/00
Мітки: модулю, пристрій, формування, залишків
Формула / Реферат:
Формула изобретения1. Устройство для формирования остатков по модулю, содержащее 1-1 группу сумматоров (1 = n/q, n - разрядность числа, q - число сумматоров в группе) и блок свертки, выходы которого являются выходами устройства, прямые входы первого слагаемого и входы переноса сумматоров первой группы являются первой, второй и третьей группами информационного входов устройства, прямые входы первого слагаемого сумматоров (і-й группы. (і...
Пристрій для формування залишків по модулю
Номер патенту: 612
Опубліковано: 15.12.1993
Автор: Черкаський Микола Вячеславович
МПК: H03M 7/14
Мітки: модулю, пристрій, залишків, формування
Формула / Реферат:
Формула изобретения1. Устройство для формирования остатков по модулю, содержащее (1-1) групп одноразрядных сумматоров (1= n/q, где n - разрядность числа, q - число сумматоров в группах) и блок свертки, причем прямые входы первого слагаемого одноразрядных сумматоров і-й группы (I = 1 - 1 - 1) соединены с входами соответствующих разрядов (і+1)-й группы информационного входа устройства, выход переноса к-го одноразрядного сумматора і-й...
Пристрій для з’єднання процесорів через спільну пам’ять у багатопроцесорній системі
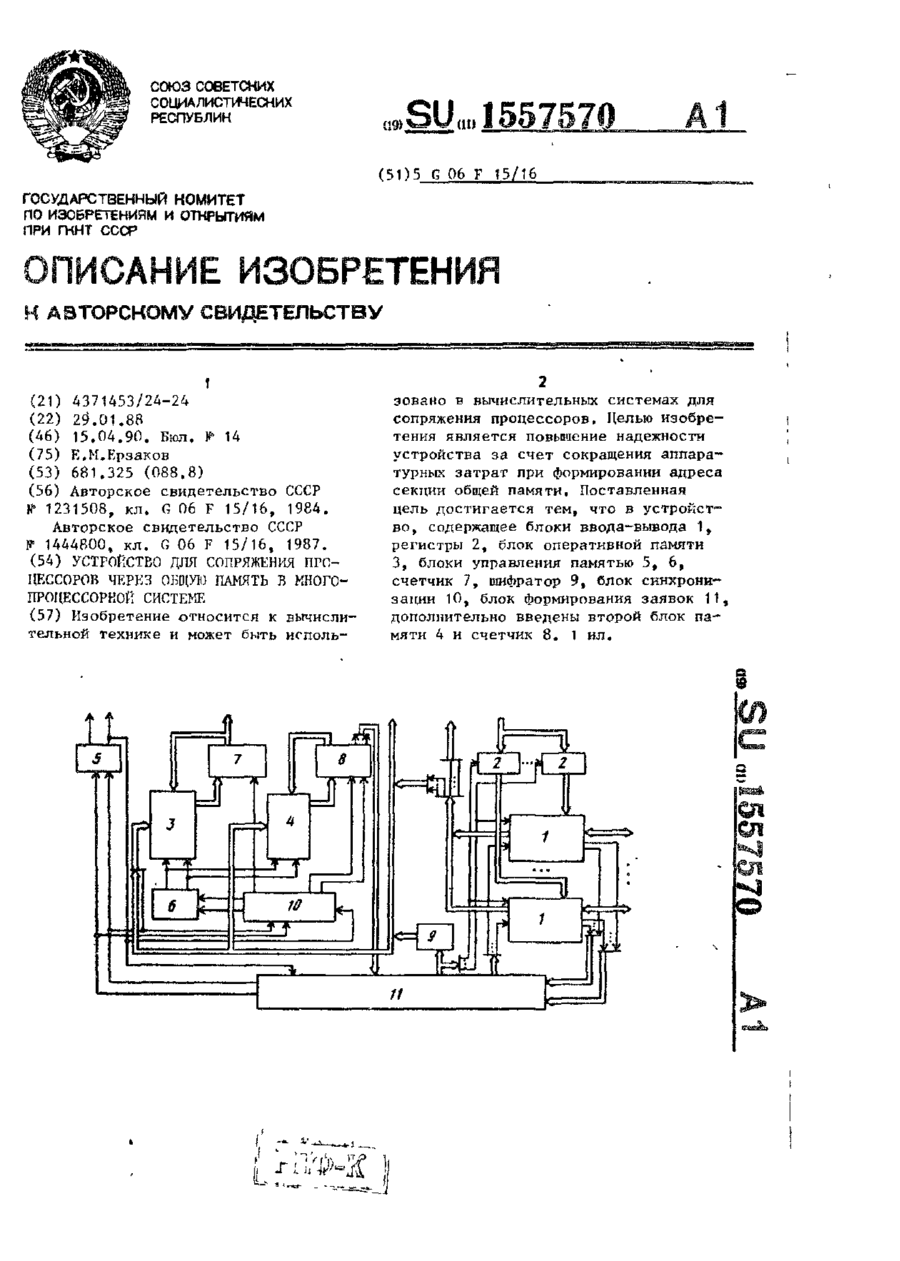
Номер патенту: 1662
Опубліковано: 25.10.1994
Автор: Єрзаков Євген Михайлович
МПК: G05B 21/00, G06F 15/16, H03K 17/00
Мітки: пристрій, з'єднання, пам'ять, процесорів, спільну, багатопроцесорній, системі
Формула / Реферат:
Устройство для сопряжения процессоров через общую память в многопроцессорной системе, содержащее N блоков ввода-вывода, N регистров, блок памяти, первый и второй блоки управления памятью, первый и второй счетчики, шифратор, блок синхронизации и блок формирования заявок, информационные входы-выходы блоков ввода-вывода являются входами-выходами обмена устройства, выходы квитирования записи всех блоков ввода-вывода подключены соответственно к...
Попередній патент: Спосіб фармакологічного захисту від ціанідів
Наступний патент: Нейрокомп’ютерний пристрій розпізнавання повітряних об’єктів
Випадковий патент: Пристрій для вимірювання витрати газу