Позиційний привід
Номер патенту: 100603
Опубліковано: 10.01.2013
Автори: Галецький Олександр Сергійович, Узунов Олександр Васильович, Ночніченко Ігор Вікторович
Формула / Реферат
1. Позиційний привід, що містить блок програмного управління (ПУ) з електричними виходами, блок дискретного розподілення з електричним керуючими входами (ДРЕК), що має канали живлення, зливу та робочі канали, блок дозування робочої рідини (ДРР), що має канали нагнітання, зливу та робочі канали, блок реверсу з електричними керуючими входами (РЕК), що має канали нагнітання, зливу та робочі канали, та виконавчий пристрій з рухомим елементом та двома робочими каналами, причому до каналів живлення та зливу блока ДРЕК приєднано відповідно вихід та вхід джерела живлення робочого тіла, робочі канали блока ДРЕК приєднано до робочих каналів блока ДРР, нагнітальний канал блока ДРР приєднано до каналу нагнітання блока РЕК, а зливний канал блока ДРР приєднано до каналу зливу блока РЕК, робочі канали блока РЕК приєднано до робочих каналів виконавчого пристрою, а електричні виходи блока ПУ зв'язані з електричними керуючими входами блоків ДРЕК та РЕК, який відрізняється тим, що блок ДРЕК виконано у вигляді трипозиційного чотириканального розподільника, а блок ДРР виконано у вигляді мультиплікатора, функцію блока РЕК виконує трипозиційний чотириканальний гідророзподільник, а до зливного каналу блока ДРР приєднано підживлювальний бак.
2. Позиційний привід за одним з п. 1, який відрізняється тим, що рухомий елемент виконавчого пристрою зв'язано здатчиком положення, вихід якого приєднано до блока ПУ.
3. Позиційний привід, що містить блок програмного управління (ПУ) з електричними виходами, блок дискретного розподілення з електричним керуючими входами (ДРЕК), що має канали живлення, зливу та робочі канали, блок дозування робочої рідини (ДРР), що має канали нагнітання, зливу та робочі канали, блок реверсу з електричними керуючими входами (РЕК), що має канали нагнітання, зливу та робочі канали, та виконавчий пристрій з рухомим елементом та двома робочими каналами, причому до каналів живлення та зливу блока ДРЕК приєднано відповідно вихід та вхід джерела живлення робочого тіла, робочі канали блока ДРЕК приєднано до робочих каналів блока ДРР, нагнітальний канал блока ДРР приєднано до каналу нагнітання блока РЕК, а зливний канал блока ДРР приєднано до каналу зливу блока РЕК, робочі канали блока РЕК приєднано до робочих каналів виконавчого пристрою, а електричні виходи блока ПУ зв'язані з електричними керуючими входами блоків ДРЕК та РЕК, який відрізняється тим, що блок ДРЕК виконано у вигляді трипозиційного чотириканального розподільника, функцію блока РЕК виконує трипозиційний чотириканальний гідророзподільник, блок ДРР виконано у вигляді двотактного мультиплікатора, що має корпус, в якому співвісно встановлені поршень зворотно поступальної дії та два плунжери, кожний з яких виконаний з забезпеченням контакту внутрішньої торцевої поверхні з одною з зовнішніх торцевих поверхонь поршня, кожна з яких утворює сумісно з корпусом вхідну робочу камеру, а зовнішня торцева поверхня кожного плунжера сумісно з корпусом утворює плунжерну камеру, причому кожна плунжерна камера сполучається з діагоналлю гідравлічного мосту, який утворюють зворотні клапани, напрямок підключення яких забезпечує можливість руху робочої рідини від зливного каналу до нагнітального каналу двотактного мультиплікатора які є каналами зливу та нагнітання блока ДРР, причому поршень виконано з двох взаємно рухомих частин з обмеженим відносно однієї до іншої ходом, величина якого є менше ходу плунжера, а порожнина між частинами поршня приєднана до додаткового каналу управління з можливістю подачі тиску від додатково встановленого розподільника з електричним керуючим входом, що з'єднаний з блоком ПУ, а до зливного каналу блока ДРР приєднано підживлювальний бак.
4. Привід за п. 3, який відрізняється тим, що контакт внутрішньої торцевої поверхні кожного з плунжерів з одною з зовнішніх торцевих поверхонь поршня забезпечується пружинами, встановленими у плунжерних камерах.
5. Привід за п. 3, який відрізняється тим, що контакт внутрішньої торцевої поверхні кожного плунжера з одною з зовнішніх торцевих поверхонь поршня забезпечується шарніром, що фіксує взаємне положення поршня і плунжера в осьовому напрямку.
6. Привід за одним з пп. 3-6 який відрізняється тим, що рухомий елемент виконавчого пристрою зв'язано з датчиком положення, вихід якого приєднано до блока ПУ.
Текст
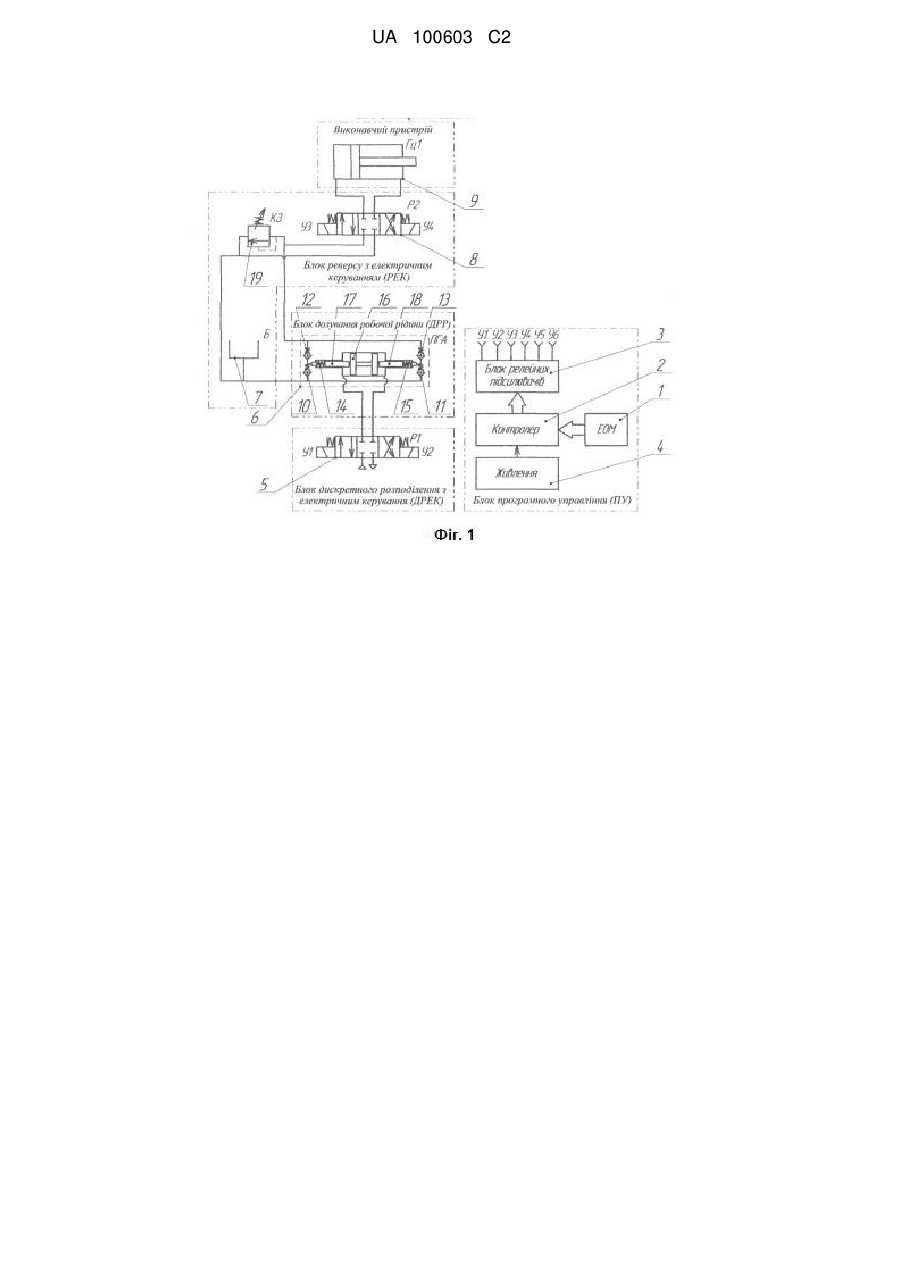
Реферат: Позиційний привід, що містить блок програмного управління (ПУ) з електричними виходами, блок дискретного розподілення з електричним керуючими входами (ДРЕК), що має канали живлення, зливу та робочі канали, блок дозування робочої рідини (ДРР), що має канали нагнітання, зливу та робочі канали, блок реверсу з електричними керуючими входами (РЕК), що має канали нагнітання, зливу та робочі канали, та виконавчий пристрій з рухомим елементом та двома робочими каналами, причому до каналів живлення та зливу блока ДРЕК приєднано відповідно вихід та вхід джерела живлення робочого тіла, робочі канали блока ДРЕК приєднано до робочих каналів блока ДРР, нагнітальний канал блока ДРР приєднано до каналу нагнітання блока РЕК, а зливний канал блока ДРР приєднано до каналу зливу блока РЕК, робочі канали блока РЕК приєднано до робочих каналів виконавчого пристрою, а електричні виходи блока ПУ зв'язані з електричними керуючими входами блоків ДРЕК та РЕК. Для забезпечення вищої точності управління і її незалежності від потрібної позиції рухомого елементу виконавчого пристрою, спрощення конструкції, збільшення зусилля на рухомому елементі та забезпечення незалежності цього зусилля від сигналу управління блок ДРЕК виконано у вигляді трипозиційного чотириканального розподільника, а блок ДРР виконано у вигляді мультиплікатора, функцію блока РЕК виконує трипозиційний чотириканальний гідророзподільник, а до зливного каналу блока ДРР приєднано підживлювальний бак. UA 100603 C2 (12) UA 100603 C2 UA 100603 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до позиційних приводів систем електро-, пневмо- та/або гідроавтоматики і може бути використаний в механізмах дискретного позиціонування робочого органу. Для позиціонування робочого органу в гідро- та/або пневмоприводах автоматичних систем використовують два типи управління: дросельне та об'ємне. Приводи з дросельним типом регулювання є відносно прості за конструкцією, але мають низький ККД (В.А. Лещенко, Гидравлические следящие приводы станков с программным управлением, М. Машиностроение, 1975, стр.77, рис.36), а приводи з об'ємним управлінням дозволяють отримати вищий ККД (В.А. Лещенко, Гидравлические следящие приводы станков с программным управлением, М. Машиностроение, 1975, стр.62, рис.27), але мають складну конструкцію через використання регульованих насосів або гідро двигунів. Використання пневматичних приводів з об'ємним принципом регулювання для позиціонування робочого органу не дозволяє отримати високу точність з причини малої жорсткості робочого тіла - повітря. Використання з цією ж метою гідравлічних приводів з більш жорстким робочим тілом - дозволяє отримати високу точність та жорсткість приводу. Використання для позиціонування комбінованих приводів - пневмогідравлічних, з використанням пневмогідравлічних перетворювачів, дозволяє отримати переваги пневматичного і гідравлічного приводів. Такими перевагами є можливість використання пневматичної енергії від джерела низького тиску для живлення приводу і можливість точного та жорсткого позиціонування робочого органу. Створення позиційного приводу на основі об'ємного принципу управління дозволить отримати привод з високими точністю, жорсткістю та ККД. Найбільш близьким за сукупністю ознак до винаходу, що заявляється, є багатопозиційний пневмогідравлічний привод із об'ємним принципом управління (Патент України №27812. Багатопозиційний пневмогідравлічний привод. МПК F15В 7/00, опубл. 12.11.2007.). Позиційний привід, що містить блок програмного управління (ПУ) з електричними виходами, блок дискретного розподілення з електричним керуючими входами (ДРЕК), що має канали живлення, зливу та робочі канали, блок дозування робочої рідини (ДРР), що має канали нагнітання, зливу та робочі канали, блок реверсу з електричними керуючими входами (РЕК), що має канали нагнітання, зливу та робочі канали, та виконавчий пристрій з рухомим елементом та двома робочими каналами, причому до каналів живлення та зливу блока ДРЕК приєднано відповідно вихід та вхід джерела живлення робочого тіла, робочі канали блоку ДРЕК приєднано до робочих каналів блока ДРР, нагнітальний канал блока ДРР приєднано до каналу нагнітання блока РЕК, а зливний канал блока ДРР приєднано до каналу зливу блока РЕК, робочі канали блока РЕК приєднано до робочих каналів виконавчого пристрою, а електричні виходи блока ПУ зв'язані з електричними керуючими входами блоків ДРЕК та РЕК. Недоліками цього приводу є: складний закон управління, низька і неоднакова точність позіціонування, складна конструктивна реалізація, мале зусилля на штоку виконавчого пристрою і його залежність від сигналу керування. Пояснюється це тим, що для позиціонування рухомого елемента виконавчого пристрою за об'ємним принципом, у блоці ДРР, використано розрядне управління, яке складне за конструкцією і логічною реалізацією тому, що потребує подачу робочої рідини від тієї або іншої комбінації керуючих камер блока ДРР з різним об'ємом робочої рідини до гідравлічної порожнини виконавчого пристрою відповідно до потрібної позиції рухомого елемента. Для управління керуючими камерами блока ДРР у блоці ДРЕК використовують значну кількість розподільників, що відповідає кількості керуючих камер, що також ускладнює конструкцію приводу. Низька і неоднакова точність приводу в залежності від потрібного положення рухомого елемента виконавчого пристрою обумовлена більшими розмірами поршнів керуючих камер першого розряду по відношенню до камер другого, третього і наступних вищих розрядів у блоці ДРР. Це обумовлено різними і більшими за величиною витоками крізь зазори у блоці ДРР, через більші розміри зазорів між поршнями і боковими стінками керуючих камер для більших управляючих розрядів. Мале і змінне зусилля на рухомому елементі виконавчого пристрою є наслідком малого значення співвідношення площ поршнів керуючих камер у блоці ДРР і площі поршня виконавчого пристрою і залежності зусилля від цього співвідношення, яке змінюється відповідно до розряду керуючої камери, яка активізується сигналом управління. В основу винаходу по першому незалежному пункту формули поставлена задача створення приводу з об'ємним принципом управління, що забезпечує: вищу точність і її незалежність від потрібної позиції рухомого елементу виконавчого пристрою, спрощення конструкції, збільшення зусилля на рухомому елементі виконавчого пристрою та забезпечення незалежності цього зусилля від сигналу управління за рахунок використання послідовного управління та введення додаткової мультиплікації за рахунок введення в блок ДРР мультиплікатора, використання 1 UA 100603 C2 5 10 15 20 25 30 35 40 45 50 55 60 розподільника в блоці ДРЕК, гідророзподільника в блоці РЕК та встановлення нових зв'язків між елементами позиційного приводу. Для цього позиційний привід містить блок програмного управління (ПУ) з електричними виходами, блок дискретного розподілення з електричним керуючими входами (ДРЕК), що має канали живлення, зливу та робочі канали, блок дозування робочої рідини (ДРР), що має канали нагнітання, зливу та робочі канали, блок реверсу з електричними керуючими входами (РЕК), що має канали нагнітання, зливу та робочі канали, та виконавчий пристрій з рухомим елементом та двома робочими каналами, причому до каналів живлення та зливу блока ДРЕК приєднано відповідно вихід та вхід джерела живлення робочого тіла, робочі канали блока ДРЕК приєднано до робочих каналів блока ДРР, нагнітальний канал блока ДРР приєднано до каналу нагнітання блока РЕК, а зливний канал блока ДРР приєднано до каналу зливу блока РЕК, робочі канали блока РЕК приєднано до робочих каналів виконавчого пристрою, а електричні виходи блока ПУ зв'язані з електричними керуючими входами блоків ДРЕК та РЕК. Згідно з винаходом, блок ДРЕК виконано у вигляді трипозиційного чотириканального розподільника, а блок ДРР виконано у вигляді мультиплікатора, функцію блоку РЕК виконує трипозиційний чотириканальний гідророзподільник, а до зливного каналу блока ДРР приєднано підживлювальний бак. Виконання блока ДРР позиційного приводу у вигляді мультиплікатора замість набору керуючих камер забезпечує всмоктування робочої рідини з зливного каналу мультиплікатора (блоку ДРР) її дозування і подачі цих доз до нагнітального каналу мультиплікатора (блока ДРР). Це забезпечується завдяки зворотно-поступальному руху поршня мультиплікатора за рахунок послідовного приєднання робочих каналів мультиплікатора за допомогою розподільника блоку ДРЕК до вихідного та вхідного каналів джерела живлення. Дози робочої рідини з виходу блока ДРР послідовно подаються до порожнини виконавчого пристрою, що забезпечує рух і позиціонування його рухомого елементу. Використання послідовного закону управління забезпечує однакову точність позиціонування незалежно від потрібної позиції рухомого елемента виконавчого пристрою, а також збільшення зусилля на рухомому елементі виконавчого пристрою і його незалежність від закону керування. Виконання блока ДРЕК у вигляді трипозиційного чотириканального розподільника, а блока РЕК у вигляді трипозиційного чотириканального гідророзподільника дозволяє спростити конструкцію позиційного приводу. Приєднання до зливного каналу блока ДРР підживлювального бака забезпечує збереження роботоздатності приводу у разі використання виконавчого пристрою як з одностороннім, так і двостороннім штоком, а також у разі наявності витоків робочої рідини. Більше зусилля в порівнянні з найближчим аналогом, при однаковому з ним значенні тиску живлення, досягається за рахунок введення додаткової мультиплікації (забезпечення відповідного співвідношення площ торцевих поверхонь поршня мультиплікатора та його плунжерів), а незалежність зусилля від закону управління забезпечується незмінністю коефіцієнту мультиплікації за рахунок використання плунжерів одного діаметра. Згідно з винаходом, рухомий елемент виконавчого пристрою зв'язано з датчиком положення, вихід якого приєднано до блока ПУ. Застосування датчика положення забезпечує додаткове підвищення точності позиціонування приводу за рахунок подачі корегувального сигналу від системи керування при наявності розбіжності між потрібним і дійсним положеннями рухомого елемента. В основу винаходу по другому незалежному пункту формули поставлена задача створення позиційного приводу з об'ємним принципом управління, що забезпечує: ще вищу точність і її незалежність від потрібної позиції штоку виконавчого пристрою, дає можливість отримання максимальної швидкості руху штока і максимальної точності позиціонування, спрощення конструкції, збільшення зусилля на рухомому елементі виконавчого пристрою та забезпечення незалежності цього зусилля від сигналу управління за рахунок використання послідовного управління та введення додаткової мультиплікації за рахунок введення в блок ДРР мультиплікатора, використання розподільника в блоці ДРЕК, гідророзподільника в блоці РЕК та встановлення нових зв'язків між елементами позиційного приводу. Згідно з винаходом, по другому варіанта виконання позиційного приводу блок ДРЕК виконано у вигляді трипозиційного чотириканального розподільника, функцію блока РЕК виконує трипозиційний чотириканальний гідророзподільник, блок ДРР виконано у вигляді двотактного мультиплікатора, що має корпус, в якому співвісно встановлені поршень зворотно поступальної дії та два плунжери, кожний з яких виконаний з забезпеченням контакту внутрішньої торцевої поверхні з одною з зовнішніх торцевих поверхонь поршня, кожна з яких утворює сумісно з корпусом вхідну робочу камеру, а зовнішня торцева поверхня кожного 2 UA 100603 C2 5 10 15 20 25 30 35 40 45 50 55 60 плунжера сумісно з корпусом утворює плунжерну камеру, причому кожна плунжерна камера сполучається з діагоналлю гідравлічного мосту, який утворюють зворотні клапани, напрямок підключення яких забезпечує можливість руху робочої рідини від зливного каналу до нагнітального каналу двотактного мультиплікатора які є каналами зливу та нагнітання блоку ДРР, причому поршень виконано з двох взаємно рухомих частин з обмеженим по відношенню однієї до іншої ходом, величина якого є менше ходу плунжера, а порожнина між частинами поршня приєднана до додаткового каналу управління з можливістю подачі тиску від додатково встановленого розподільника з електричним керуючим входом, що з'єднаний з блоком ПУ, а до зливного каналу блока ДРР приєднано підживлювальний бак. Виконання блока ДРР позиційного приводу у вигляді двотактного мультиплікатора замість набору керуючих камер забезпечує всмоктування робочої рідини з зливного каналу мультиплікатора (блоку ДРР) її дозування і подачі цих доз до нагнітального каналу мультиплікатора (блоку ДРР). Це забезпечується завдяки зворотно-поступальному руху поршня мультиплікатора за рахунок послідовного приєднання робочих каналів мультиплікатора за допомогою розподільника блока ДРЕК до вихідного та вхідного каналів джерела живлення. Дози робочої рідини з виходу блока ДРР послідовно подаються до порожнини виконавчого пристрою, що забезпечує рух і позиціонування його рухомого елементу. Виконання мультиплікатора двотактним дозволяє одночасно з використанням порції робочої рідини з першої плунжерної камери, яка забезпечує роботу першого такту, заповнювати порожнину другої плунжерної камери для підготовки порції робочої рідини для роботи на другому такті, що збільшує досяжну швидкість руху рухомого елементу у два рази в порівнянні з однотактним мультиплікатором. Виконання поршня двотактного мультиплікатора з двох частин з можливістю взаємного руху з обмеженим ходом дозволяє утворити між ними порожнину, яка забезпечує можливість управління довжиною поршня шляхом подачі до порожнини робочого тіла під тиском від додатково встановленого розподільника блоку ДРЕК. У разі подачі тиску у порожнину між частинами вказаного поршня його довжина збільшиться на величину можливого взаємного переміщення його частин. У випадку приєднання цієї порожнини до зливного каналу, тиск який діє на зовнішні поверхні поршня притисне обидві частини поршня одну до одної і його довжина зменшиться до мінімальної. Це дозволяє керувати довжиною поршня в процесі роботи приводу. Зміна довжини поршня дозволяє змінювати величину робочого ходу плунжерів, що забезпечує можливість управління об'ємом доз робочої рідини, що подається у порожнини виконавчого пристрою і відповідно можливість управління швидкістю рухомого елементу виконавчого пристрою та дискретністю і відповідно точністю його позиціонування. Зміна довжини поршня від мінімальної (при русі рухомого елемента до моменту підходу до заданої позиції) до максимальної (при підході до заданої позиції), забезпечує можливість отримання максимальної швидкості руху штока і мінімальної дискретності позиціонування. Це збільшує швидкість рухомого елемента і підвищую точність позиціонування в порівняння з найближчим аналогом. Згідно з винаходом, контакт внутрішньої торцевої поверхні кожного з плунжерів з одною з зовнішніх торцевих поверхонь поршня забезпечується пружинами встановленими у плунжерних камерах. Це спрощує технологію виготовлення елементів мультиплікатора. Згідно з винаходом, контакт внутрішньої торцевої поверхні кожного плунжера з одною з зовнішніх торцевих поверхонь поршня забезпечується шарніром, що фіксує взаємне положення поршня і плунжера в осьовому напрямку. Це дозволяє зменшити вимоги до технології виготовлення елементів мультиплікатора при збережені його роботоспроможності. Суть винаходу пояснюється кресленнями, де на фіг. 1 наведено схему позиційного приводу за п.1 формули; фіг. 2 - схема приводу з датчиком положення рухомого елемента виконавчого пристрою за п. 2 формули; фіг. 3 - схема приводу за п. 3 формули; фіг. 4 - двотактний мультиплікатор зі зворотними пружинами; фіг. 5 - двотактний мультиплікатор з осьовою фіксацією плунжера відносно поршня за допомогою шарнірного з'єднання плунжера із поршнем; фіг. 6 - привід за п. 6 формули. Позиційний привід (фіг. 1) по першому варіанту виконання пристрою містить блок програмного управління (ПУ); блок дискретного розподілення з електричним керуванням (ДРЕК), блок дозування робочої рідини (ДРР); блок реверсу з електричним керуванням (РЕК) та виконавчий пристрій. Блок програмного управління (ПУ) складається з ЕОМ 1, що зв'язана, на період програмування, з контролером 2. Контролер зв'язаний з блоком релейних підсилювачів 3 та джерелом живлення 4. Виходи релейного підсилювача блока ПУ зв'язані з чотириканальним трипозиційним розподільником 5 блока ДРЕК та гідророзподільником 8 блока РЕК. Робочі канали розподільника 5 зв'язані з робочими каналами мультиплікатора 6 блока ДРР, що може 3 UA 100603 C2 5 10 15 20 25 30 35 40 45 50 55 бути виконаний, як однотактним (на кресленні не показаний) так і двотактним. Нагнітальний та зливний канали мультиплікатора блоку ДРР зв'язані відповідно з нагнітальним і зливним каналами гідророзподільника 8 блока РЕК, а його робочі канали приєднано до робочих каналів виконавчого пристрою 9, а в зливний канал блока ДРР підключено підживлювальний бак 7. Нагнітальний канал блока ДРР зв'язано зі зливним каналом блоку ДРР через запобіжний клапан 19. На фіг. 2 приведена схема приводу по першому варіанту виконання пристрою, що відрізняється від схеми на фіг. 1, додатково введеним датчиком положення 20. Датчик зв'язаний з рухомим елементом виконавчого пристрою 9, що контролює його положення та передає інформацію про стан на блок ПУ. На фіг. 3 приведена схема приводу по другому варіанту виконання пристрою, що відрізняється від схеми на фіг. 1 та фіг, 2, конструкцією поршня 16 двотактного мультиплікатора 6, який виконано з двох частин із можливістю обмеженого взаємного руху, що дозволяє утворити між ними порожнину яка забезпечує можливість управління довжиною поршня 16 шляхом подачі стисненого робочого тіла через розподільник 21 блокa ДРЕК. Двотактний мультиплікатор 6 (фіг. 4) по другому варіанту виконання пристрою складається зі зворотних клапанів всмоктування 10, 11 та нагнітання 12, 13, що підключені відповідно до схеми гідравлічного мосту, напрямок підключення забезпечує можливість руху робочої рідини від зливного каналу до нагнітального каналу, пружин рівних за жорсткістю та довжиною 14, 15, які розташовані в плунжерних порожнинах і підтискають плунжери 17, 18 до бокових зовнішніх поверхонь поршня 16 блока ДРР. Двотактний мультиплікатор 6 (фіг. 5) по другому варіанту виконання пристрою складається з зворотних клапанів всмоктування 10, 11 та нагнітання 12, 13, плунжерів 17, 18, які зафіксовані відносно до поршня 16 в осьовому напрямку за допомогою шарніра. При цьому шарніри виконують функцію забезпечення контакту між плунжерами і поршнем. Шарнір забезпечує фіксацію плунжера відносно поршня в осьовому напрямку і свободу їх відносного руху в інших напрямках. На фіг. 6 по другому варіанту виконання пристрою приведена схема приводу, що відрізняється від схеми на фіг. 3, додатково введеним датчиком положення 20. Датчик зв'язаний з рухомим елементом виконавчого пристрою 9, що контролює його положення та передає інформацію про стан на блок ПУ. Позиційний привід працює наступним чином. У блоці ПУ за допомогою ЕОМ 1 програмують контролер 2, який відповідно до програми керує блоком релейних підсилювачів 3, виходи якого з'єднані з входами електричного керування розподільників 5 та 8 блоків ДРЕК та РЕК. У вихідному стані розподільники 5 та 8 знаходяться в середньому положенні, а поршень та два плунжера двотактного мультиплікатора 6 блока ДРР знаходяться в лівому крайньому положенні, рухомий елемент виконавчого пристрою втягнуто. При подачі сигналу з релейного підсилювача 3 на електромагніти Y1 та Y3 розподільник 5 і гідророзподільник 8 переходять у крайнє ліве положення. Стиснене робоче тіло подається в ліву вхідну робочу камеру двотактного мультиплікатора 6, в результаті чого відбувається переміщення його поршня 16, який переміщує плунжер 18, що стискає пружину 15 і відповідно робочу рідину яку подається через зворотний клапан 13, в нагнітальний канал блока ДРР, при цьому зворотні клапани 11 та 12 закриті, а через зворотній клапан 10 робоча рідина всмоктується, завдяки пружині 14, що переміщує плунжер 17 вправо і створює розрідження в плунжерній камері. Стиснена рідина, що проходить через зворотний клапан 13, через розподільник 8 блока РЕК подається в поршневу порожнину виконавчого пристрою 9, що спричиняє переміщення рухомого елемента виконавчого пристрою на величину, яка пропорційна об'єму витісненої рідини з плунжерної камери двотактного мультиплікатора. Рідина, що витискується з штокової порожнини виконавчого пристрою через гідророзподільник 8 блока РЕК подається у зливний канал двотактного мультиплікатора 6, що через зворотній клапан 10 потрапляє в плунжерну камеру плунжера 17. При знятті сигналу з електромагніту Y1 і поданні сигналу на електромагніт Y2, розподільник 5 блоку ДРЕК переходить в крайнє праве положення. Це призводить до підводу стисненого повітря до правої робочої камери двотактного мультиплікатора 6, а його ліва робоча камера сполучається зі зливом. В наслідок цього поршень 16 починає рухатися вліво і переміщує плунжер 17 та стискає пружину 14, витискуючи робочу рідину через клапан 12 в нагнітальний канал блоку ДРР, при цьому пружина 15 діє на плунжер 18 і через клапан 11 робоча рідина заповнює плунжерну робочу камеру. Клапани 10 і 13 закриті. Далі рух робочої рідини по нагнітальному та зливному каналам блока ДРР відбувається так само як описано вище. 4 UA 100603 C2 5 10 15 20 25 30 35 40 45 50 При відпрацюванні заданої кількості імпульсів управління, завдяки роботі електромагнітів Y1 та Y2 розподільника 5 і двотактного мультиплікатора, через нагнітальний канал порції робочої рідини під тиском будуть подаватися у порожнину виконавчого пристрою, що буде призводити до позиціонування рухомого елементу виконавчого пристрою 9 у потрібну позицію. При цьому швидкість руху рухомого елемента буде відповідати частоті слідування імпульсів, які подаються на електромагніти Y1 та Y2. При використанні у позиційному приводі датчика положення 20, сигнал від нього використовується для формування корегувального управляючого сигналу на привід в залежності від дійсного положення рухомого елемента в порівнянні з бажаним положенням. Робота позиційного приводу, що відповідає другому варіанту виконання пристрою, відрізняється тим, що у програмі управління приводом враховується можливість управління дискретністю дозування робочої рідини. При відпрацюванні програми управління від блока ПУ і відсутності при цьому команди від блока ПУ на переключення електромагніта Y5 розподільника 21 блока ДРЕК рух рухомого елемента виконавчого пристрою відбувається з максимально досяжною, при заданих параметрах приводу, швидкістю. При подачі команди від блоку ПУ на переключення електромагніта Y5 розподільника 21 блока ДРЕК (при підході до заданої позиції рухомого елементa), тиск повітря подається у порожнину між рухомими частинами поршня 16. Це призводить до збільшення довжини поршня до максимально можливої, зменшення величини ходу поршня 16 і відповідно зменшення ходу плунжерів 17 та 18 і доз робочої рідини, що надходять до порожнини виконавчого пристрою 9. Зменшення величини доз робочої рідини забезпечує можливість отримання більшої точності позиціонування рухомого елементу. В кінцевому результаті це дозволяє отримувати максимальну ефективність від використання позиційного приводу. Напрямок руху штока виконавчого пристрою змінюється при перемиканні електромагнітів Y3 та Y4 гідророзподільника 8 блока РЕК. Запобіжний клапан 19 запобігає пошкодженню каналів та апаратів позиційного приводу при значному навантаженні на рухомому елементі. При збільшенні тиску вище максимального клапан 19 скидає частину робочої рідини у зливний канал, що призводить до зменшення тиску. Перевагами запропонованого приводу по першому і другому варіантах виконання є спрощена конструкція, за рахунок зменшення кількості елементів та спрощення закону управління, більше досяжне зусилля на рухомому елементі, його незалежність від управляючого сигналу та більша точність позиціонування. Двотактна дія мультиплікатора забезпечує заповнення робочою рідиною одної плунжерної камери при одночасній подачі рідини з іншої плунжерної камери, що дозволяє отримати більшу в порівнянні з прототипом швидкість руху штоку і плавність ходу. Дискретність позиційного приводу при прямому ход обчислюється за залежністю: (h hz ) f , H' SП де h - хід плунжера мультиплікатора, що дорівнює ходу його поршню; h z - величина зміни довжини поршню; f - площа плунжера мультиплікатора; SП - площа поршня виконавчого пристрою в поршневій камері. Зусилля, що виникає на рухомому елементі, при прямому ході, виконавчого пристрою розраховується з рівняння: p f ' FШТ в х nn SП pв с SШП , f де pв х - тиск в пневматичній лінії; fnn - площа поршня мультиплікатора, pв с - тиск всмоктування мультиплікатора, SШП - площа поршня виконавчого пристрою в штоковій порожнині. Дискретність та зусилля при зворотному ході визначають аналогічно: (h h z ) f ; H'' SШП p f ' FШП в х nn SШП pв х SП f При визначенні дискретності та зусилля для позиційного приводу відповідно до першого варіанту винаходу величина h z приймається рівною нулю. Таким чином, запропонована схема позиційного приводу забезпечує позиціонування робочого органу з більшою точністю, незалежності цієї точності від потрібної позиції штоку 5 UA 100603 C2 виконавчого пристрою, підвищення швидкості руху штоку виконавчого пристрою, спрощення конструкції, збільшення зусилля та забезпечення його незалежності від сигналу управління, що вирішує поставлену технічну задачу. 5 10 15 20 25 30 35 40 45 50 55 ФОРМУЛА ВИНАХОДУ 1. Позиційний привід, що містить блок програмного управління (ПУ) з електричними виходами, блок дискретного розподілення з електричним керуючими входами (ДРЕК), що має канали живлення, зливу та робочі канали, блок дозування робочої рідини (ДРР), що має канали нагнітання, зливу та робочі канали, блок реверсу з електричними керуючими входами (РЕК), що має канали нагнітання, зливу та робочі канали, та виконавчий пристрій з рухомим елементом та двома робочими каналами, причому до каналів живлення та зливу блока ДРЕК приєднано відповідно вихід та вхід джерела живлення робочого тіла, робочі канали блока ДРЕК приєднано до робочих каналів блока ДРР, нагнітальний канал блока ДРР приєднано до каналу нагнітання блока РЕК, а зливний канал блока ДРР приєднано до каналу зливу блока РЕК, робочі канали блока РЕК приєднано до робочих каналів виконавчого пристрою, а електричні виходи блока ПУ зв'язані з електричними керуючими входами блоків ДРЕК та РЕК, який відрізняється тим, що блок ДРЕК виконано у вигляді трипозиційного чотириканального розподільника, а блок ДРР виконано у вигляді мультиплікатора, функцію блока РЕК виконує трипозиційний чотириканальний гідророзподільник, а до зливного каналу блока ДРР приєднано підживлювальний бак. 2. Позиційний привід за одним з п. 1, який відрізняється тим, що рухомий елемент виконавчого пристрою зв'язано з датчиком положення, вихід якого приєднано до блока ПУ. 3. Позиційний привід, що містить блок програмного управління (ПУ) з електричними виходами, блок дискретного розподілення з електричним керуючими входами (ДРЕК), що має канали живлення, зливу та робочі канали, блок дозування робочої рідини (ДРР), що має канали нагнітання, зливу та робочі канали, блок реверсу з електричними керуючими входами (РЕК), що має канали нагнітання, зливу та робочі канали, та виконавчий пристрій з рухомим елементом та двома робочими каналами, причому до каналів живлення та зливу блока ДРЕК приєднано відповідно вихід та вхід джерела живлення робочого тіла, робочі канали блока ДРЕК приєднано до робочих каналів блока ДРР, нагнітальний канал блока ДРР приєднано до каналу нагнітання блока РЕК, а зливний канал блока ДРР приєднано до каналу зливу блока РЕК, робочі канали блока РЕК приєднано до робочих каналів виконавчого пристрою, а електричні виходи блока ПУ зв'язані з електричними керуючими входами блоків ДРЕК та РЕК, який відрізняється тим, що блок ДРЕК виконано у вигляді трипозиційного чотириканального розподільника, функцію блока РЕК виконує трипозиційний чотириканальний гідророзподільник, блок ДРР виконано у вигляді двотактного мультиплікатора, що має корпус, в якому співвісно встановлені поршень зворотно поступальної дії та два плунжери, кожний з яких виконаний з забезпеченням контакту внутрішньої торцевої поверхні з одною з зовнішніх торцевих поверхонь поршня, кожна з яких утворює сумісно з корпусом вхідну робочу камеру, а зовнішня торцева поверхня кожного плунжера сумісно з корпусом утворює плунжерну камеру, причому кожна плунжерна камера сполучається з діагоналлю гідравлічного мосту, який утворюють зворотні клапани, напрямок підключення яких забезпечує можливість руху робочої рідини від зливного каналу до нагнітального каналу двотактного мультиплікатора які є каналами зливу та нагнітання блока ДРР, причому поршень виконано з двох взаємно рухомих частин з обмеженим відносно однієї до іншої ходом, величина якого є менше ходу плунжера, а порожнина між частинами поршня приєднана до додаткового каналу управління з можливістю подачі тиску від додатково встановленого розподільника з електричним керуючим входом, що з'єднаний з блоком ПУ, а до зливного каналу блока ДРР приєднано підживлювальний бак. 4. Привід за п. 3, який відрізняється тим, що контакт внутрішньої торцевої поверхні кожного з плунжерів з одною з зовнішніх торцевих поверхонь поршня забезпечується пружинами, встановленими у плунжерних камерах. 5. Привід за п. 3, який відрізняється тим, що контакт внутрішньої торцевої поверхні кожного плунжера з одною з зовнішніх торцевих поверхонь поршня забезпечується шарніром, що фіксує взаємне положення поршня і плунжера в осьовому напрямку. 6. Привід за одним з пп. 3-6, який відрізняється тим, що рухомий елемент виконавчого пристрою зв'язано з датчиком положення, вихід якого приєднано до блока ПУ. 6 UA 100603 C2 7 UA 100603 C2 8 UA 100603 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюPosition drive
Автори англійськоюUzunov Oleksandr Vasyliovych, Haletskyi Oleksandr Serhiiovych, Nochnichenko Ihor Viktorovych
Назва патенту російськоюПозиционный привод
Автори російськоюУзунов Александр Васильевич, Галецкий Александр Сергеевич, Ночниченко Игорь Викторович
МПК / Мітки
МПК: F15B 9/00
Мітки: привід, позиційний
Код посилання
<a href="https://ua.patents.su/11-100603-pozicijjnijj-privid.html" target="_blank" rel="follow" title="База патентів України">Позиційний привід</a>
Позиційний привід
Номер патенту: 64197
Опубліковано: 25.10.2011
Автори: Ночніченко Ігор Вікторович, Узунов Олександр Васильович, Галецький Олександр Сергійович
МПК: F15B 9/00
Мітки: привід, позиційний
Формула / Реферат:
1. Позиційний привід, що містить блок програмного керування (ПК) з електричними виходами, блок дискретного розподілення з електричним керуючими входами (ДРЕК), що має канали живлення, зливу та робочі канали, блок дозування робочої рідини (ДРР), що має канали нагнітання, зливу та робочі канали, блок реверса з електричними керуючими входами (РЕК), що має канали нагнітання, зливу та робочі канали, та виконавчий пристрій з рухомим елементом та...
Пневматичний позиційний регулятор нечіткої логіки
Номер патенту: 52905
Опубліковано: 15.01.2003
Автори: Прач Станислав Юрьевич, Коваленко Алім Олексійович, Мушкаєв Ярослав Володимирович, Баранич Юлія Вікторівна, Шакурова Екатерина Володимирівна
МПК: F15C 1/00
Мітки: нечіткої, пневматичний, позиційний, регулятор, логіки
Формула / Реферат:
Пневматичний позиційний регулятор нечіткої логіки, що містить елемент порівняння мембранного типу, задатчик пневматичного сигналу, пневматичний підсилювач потужності та лінії зв'язку, який відрізняється тим, що регулятор оснащений блоком підготовки сигналу управління, а елемент порівняння виконано на двох одномембранних елементах НЕМП.
Слідкуючий електрогідравлічний привід
Номер патенту: 69233
Опубліковано: 16.08.2004
Автори: Нарожний Віталій Васильович, Кулік Анатолій Степанович, Фірсов Сергій Миколайович, Лученко Олег Олексійович, Таран Олександр Миколайович
МПК: F15B 9/00
Мітки: слідкуючий, привід, електрогідравлічний
Формула / Реферат:
Слідкуючий електрогідравлічний привід, який складається з послідовно з'єднаних задатчика, порівнюючого пристрою, гідропідсилювача і виконавчого гідродвигуна з потенціометром зворотного зв'язку, підключеного через буферний блок фазової корекції до порівнюючого пристрою та схеми корекції, підключеної через перемикаючий пристрій до гідропідсилювача, який відрізняється тим, що до схеми додано блок діагностування потенціометра зворотного зв'язку,...
Привід генератора спеціального призначення
Номер патенту: 59150
Опубліковано: 15.08.2003
Автор: Гільов Олександр Олександрович
МПК: H02K 33/00
Мітки: привід, призначення, спеціального, генератора
Формула / Реферат:
1. Привід генератора спеціального призначення, що складається з рукоятки, мультиплікатора і регулятора обертів , який відрізняється тим, що між рукояткою і мультиплікатором розміщений пружинний нагромаджувач мускульної енергії з храповим механізмом.2. Привід генератора по п. 1, який відрізняється тим, що пружини нагромаджувача з'єднані послідовно за схемою "початок - кінець".
Пневматичний позиційний регулятор
Номер патенту: 35340
Опубліковано: 15.03.2001
Автори: Коваленко Алім Олексійович, Сорока Сергій Іванович, Кондауров Євген Миколайович, Соснов Ігор Ігорович
МПК: F15C 3/00
Мітки: регулятор, позиційний, пневматичний
Формула / Реферат:
Пневматичний позиційний регулятор, що містить задатчик тиску, елемент порівняння, пристрій предваріння та підсилювач потужності, який відрізняється тим, що поточний тиск надходить в елемент порівняння пневматичного позиційного регулятора через додатково введений пневматичний логічний елемент "АБО" нечіткої логіки.
Попередній патент: Аераційна труба водоприймача електростанції, що гідроакумулює
Наступний патент: Спосіб визначення температури і теплового опору випромінюючої поверхні кристала світлодіода
Випадковий патент: Композиція трав'яного чаю для профілактики та лікування алергії "продукт дієтичного харчування №15"