Пневматичний позиційний регулятор нечіткої логіки
Номер патенту: 52905
Опубліковано: 15.01.2003
Автори: Мушкаєв Ярослав Володимирович, Баранич Юлія Вікторівна, Шакурова Екатерина Володимирівна, Коваленко Алім Олексійович, Прач Станислав Юрьевич
Формула / Реферат
Пневматичний позиційний регулятор нечіткої логіки, що містить елемент порівняння мембранного типу, задатчик пневматичного сигналу, пневматичний підсилювач потужності та лінії зв'язку, який відрізняється тим, що регулятор оснащений блоком підготовки сигналу управління, а елемент порівняння виконано на двох одномембранних елементах НЕМП.
Текст
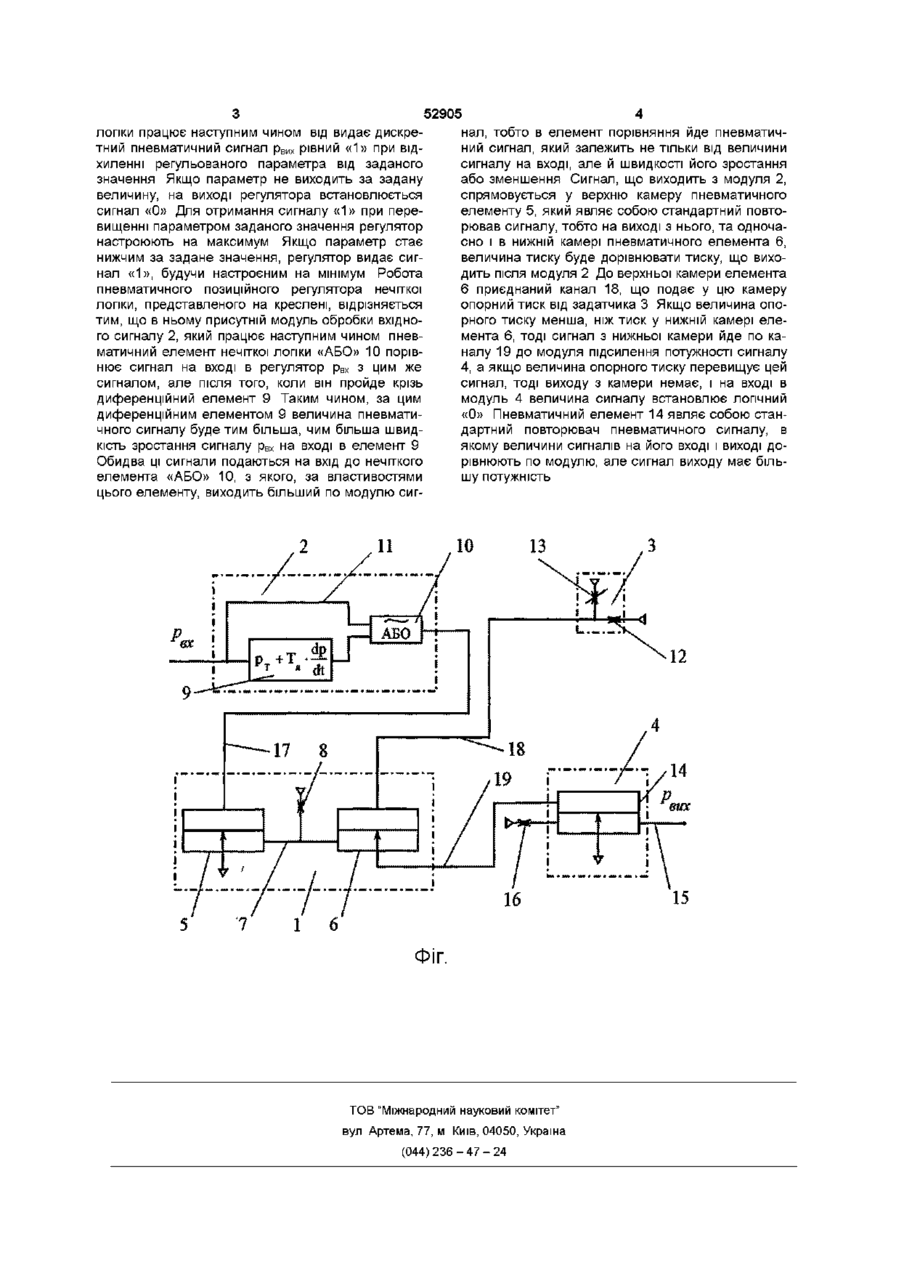
Пневматичний позиційний регулятор нечіткої логіки, що містить елемент порівняння мембранного типу, задатчик пневматичного сигналу, пневматичний підсилювач потужності та лінії зв'язку, який відрізняється тим, що регулятор оснащений блоком підготовки сигналу управління, а елемент порівняння виконано на двох одномембранних елементах НЕМП Пневматичні ЛОГІЧНІ елементи отримали широке розповсюдження в системах управління і регулювання Пневматичні ЛОГІЧНІ елементи використовуються для реалізації алгоритмів роботи виконавчих механізмів в системах управління різноманітними технологічними процесами Відомо пневматичний позиційний регулятор, що містить елемент порівняння мембранного типу, задатчик пневматичного сигналу, пневматичний підсилювач потужності та лінії зв'язку [див книгу Булгаков Б Б , Кубрак А І , «Пневмоавтоматика» К «Техніка», 1977 - 192 с ]-прийнятий за прототип Недоліком цього пневматичного позиційного регулятора є те, що пневматичний сигнал на виході з нього залежить тільки від сигналу на вході, та величини опорного сигналу Це знижує функціональні можливості цього пневматичного позиційного регулятора В основу винаходу поставлено задачу удосконалення пневматичного позиційного регулятора нечіткої логіки шляхом того, що він постачений блоком підготовки сигналу управління, а елемент порівняння виконано на двох одно-мембранних елементах НЕМП, що призведе до реагування регулятора не тільки на величину вхідного сигналу, але й на швидкість його зміни, а також покращить його динамічні показники Поставлена задача вирішується тим, що пневматичний позиційний регулятор, який містить елемент порівняння мембранного типу, задатчик пневматичного сигналу, пневматичний підсилювач потужності та лінії зв'язку, згідно винаходу, постачений блоком підготовки сигналу управління, а елемент порівняння виконано на двох одномемб ранних елементах НЕМП В результаті, пневматичний позиційний регулятор нечіткої логіки реагує не тільки на величину вхідного сигналу, але й на швидкість його зміни Дане технічне рішення пояснюється кресленням Пневматичний позиційний регулятор нечіткої логіки містить чотири модулі обробки пневматичного сигналу модуль порівняння 1, модуль обробки вхідного сигналу 2, модуль завдання опорного тиску 3, модуль підсилення потужності 4 Модуль порівняння 1 для спрощення схеми регулятора виконано на стандартних одномембранних пневматичних елементах НЕМП 5 і 6, які з'єднано за допомогою каналу 7, до якого через дросель 8 подається тиск живлення До складу модуля 2 входять диференціальний елемент 9 та елемент «АБО» нечіткої логіки 10, до яких подається вхідний тиск по каналам 11 Модуль 3, до складу якого входять постійний дросель 12 та перемінний дросель 13, призначені до задания величини опорного тиску Модуль 4 містить елемент порівняння 14, вихідний сигнал з якого береться через канал 15, приєднаний до нижньої камери, причому у цю ж камеру каналу 15 подається тиск живлення через постійний дросель 16, тобто цей пневматичний елемент являє собою стандартний повторювач пневматичного сигналу Усі модулі з'єднано за допомогою ЛІНІЙ зв'язку канал 17 з'єднує верхню камеру елемента порівняння 5 і вихідний сигнал управління, що йде з модуля 2, за допомогою пневматичного каналу 18 у верхню камеру елемента порівняння 6 подається опорний тиск з модуля 3, і, нарешті, по каналу 19 йде сигнал від елемента порівняння 6 до модуля підсилення потужності 4 Пневматичний позиційний регулятор нечіткої ю о о> ю 52905 4 нал, тобто в елемент порівняння йде пневматичлогіки працює наступним чином від видає дискрений сигнал, який залежить не тільки від величини тний пневматичний сигнал рВИх рівний «1» при відсигналу на вході, але й швидкості його зростання хиленні регульованого параметра від заданого або зменшення Сигнал, що виходить з модуля 2, значення Якщо параметр не виходить за задану спрямовується у верхню камеру пневматичного величину, на виході регулятора встановлюється елементу 5, який являє собою стандартний повтосигнал «0» Для отримання сигналу «1» при перерював сигналу, тобто на виході з нього, та одночавищенні параметром заданого значення регулятор сно і в нижній камері пневматичного елемента 6, настроюють на максимум Якщо параметр стає величина тиску буде дорівнювати тиску, що вихонижчим за задане значення, регулятор видає сигдить після модуля 2 До верхньої камери елемента нал «1», будучи настроєним на мінімум Робота 6 приєднаний канал 18, що подає у цю камеру пневматичного позиційного регулятора нечіткої опорний тиск від задатчика 3 Якщо величина опологіки, представленого на креслені, відрізняється рного тиску менша, ніж тиск у нижній камері елетим, що в ньому присутній модуль обробки вхідномента 6, тоді сигнал з нижньої камери йде по каго сигналу 2, який працює наступним чином пневналу 19 до модуля підсилення потужності сигналу матичний елемент нечіткої логіки «АБО» 10 порів4, а якщо величина опорного тиску перевищує цей нює сигнал на вході в регулятор р вх з цим же сигнал, тоді виходу з камери немає, і на вході в сигналом, але після того, коли він пройде крізь модуль 4 величина сигналу встановлює логічний диференційний елемент 9 Таким чином, за цим «0» Пневматичний елемент 14 являє собою стандиференціиним елементом 9 величина пневматидартний повторювач пневматичного сигналу, в чного сигналу буде тим більша, чим більша швидякому величини сигналів на його вході і виході докість зростання сигналу р вх на вході в елемент 9 рівнюють по модулю, але сигнал виходу має більОбидва ці сигнали подаються на вхід до нечіткого шу потужність елемента «АБО» 10, з якого, за властивостями цього елементу, виходить більший по модулю сиг вих 5 7 1 ФІГ. ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюPneumatic position controller with fuzzy logic
Автори англійськоюKovalenko Alim Oleksiiovych, Mushkaiev Yaroslav Volodymyrovych, Baranych Yulia Viktorivna
Назва патенту російськоюПневматический позиционый регулятор нечеткой логики
Автори російськоюКоваленко Алим Алексеевич, Мушкаев Ярослав Владимирович, Баранич Юлия Викторовна
МПК / Мітки
МПК: F15C 1/00
Мітки: позиційний, пневматичний, регулятор, логіки, нечіткої
Код посилання
<a href="https://ua.patents.su/2-52905-pnevmatichnijj-pozicijjnijj-regulyator-nechitko-logiki.html" target="_blank" rel="follow" title="База патентів України">Пневматичний позиційний регулятор нечіткої логіки</a>
Пневматичний позиційний регулятор
Номер патенту: 35340
Опубліковано: 15.03.2001
Автори: Коваленко Алім Олексійович, Соснов Ігор Ігорович, Сорока Сергій Іванович, Кондауров Євген Миколайович
МПК: F15C 3/00
Мітки: регулятор, пневматичний, позиційний
Формула / Реферат:
Пневматичний позиційний регулятор, що містить задатчик тиску, елемент порівняння, пристрій предваріння та підсилювач потужності, який відрізняється тим, що поточний тиск надходить в елемент порівняння пневматичного позиційного регулятора через додатково введений пневматичний логічний елемент "АБО" нечіткої логіки.
Пневматичний елемент “і” нечіткої логіки
Номер патенту: 42506
Опубліковано: 15.10.2001
Автори: Коваленко Алім Олексійович, Мушкаєв Ярослав Володимирович
МПК: F15C 1/00
Мітки: логіки, пневматичний, нечіткої, елемент
Формула / Реферат:
Пневматичний елемент «І» нечіткої логіки, що містить елемент порівняння мембранного типу та лінії зв'язку, який відрізняється тим, що в ньому з обох боків мембрани розташовано верхню та нижню камери елемента порівняння, сопловий вихід, що дотикається до мембрани, з'єднано з атмосферою, а на виході елемента порівняння розташовано стандартний пневматичний повторювач сигналу.
Пневматичний елемент “або” нечіткої логіки
Номер патенту: 45520
Опубліковано: 15.04.2002
Автори: Соснов Ігор Ігорович, Коваленко Алім Олексійович, Сорока Сергій Іванович
МПК: F15C 1/00
Мітки: логіки, нечіткої, елемент, або, пневматичний
Формула / Реферат:
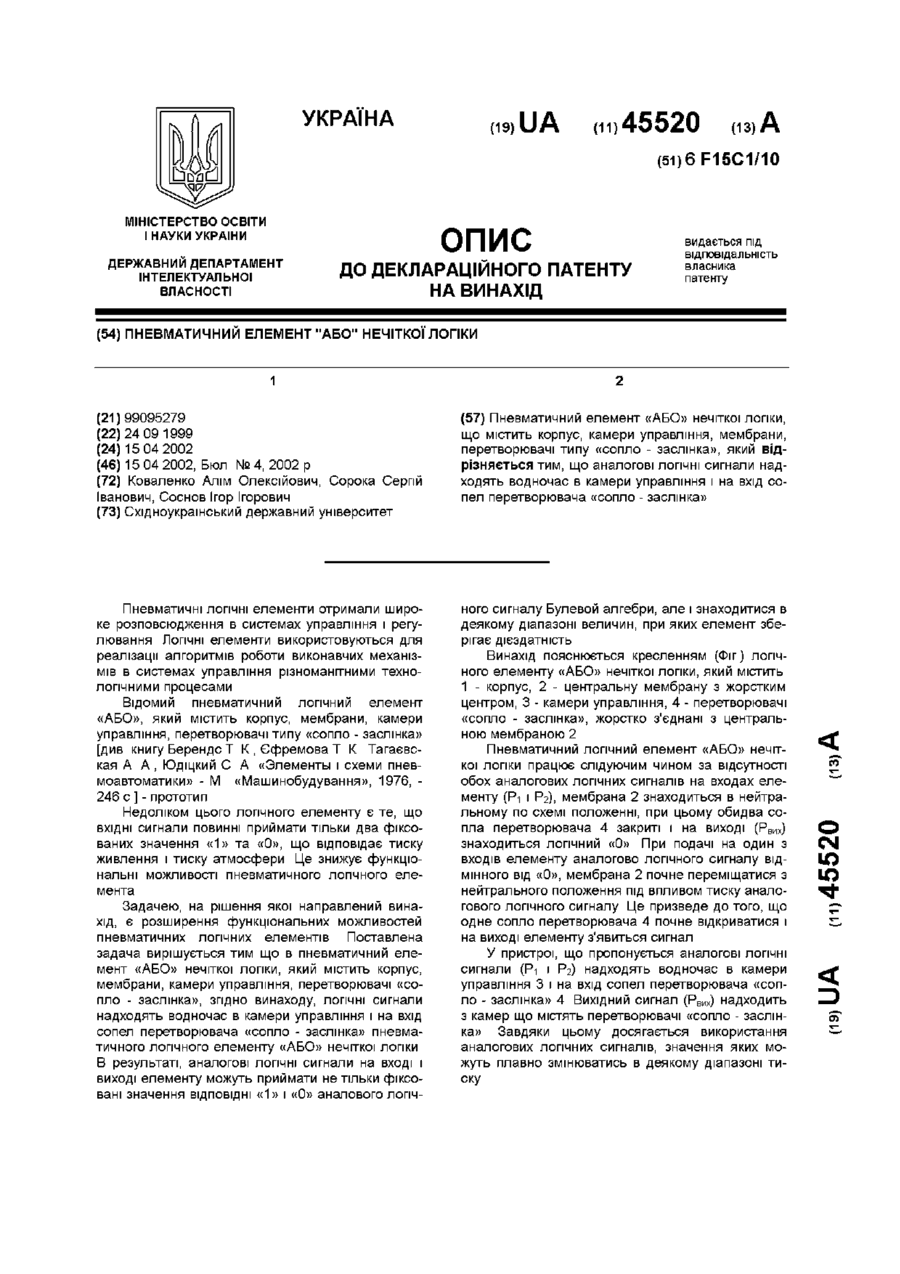
Пневматичний елемент «АБО» нечіткої логіки, що містить корпус, камери управління, мембрани, перетворювачі типу «сопло - заслінка», який відрізняється тим, що аналогові логічні сигнали надходять водночас в камери управління і на вхід сопел перетворювача «сопло - заслінка».
Пневматичний елемент ні нечіткої логіки
Номер патенту: 47578
Опубліковано: 15.07.2002
Автори: Коваленко Алім Олексійович, Соснов Ігор Ігорович, Сорока Сергій Іванович
МПК: F15C 1/00
Мітки: пневматичний, нечіткої, логіки, елемент
Формула / Реферат:
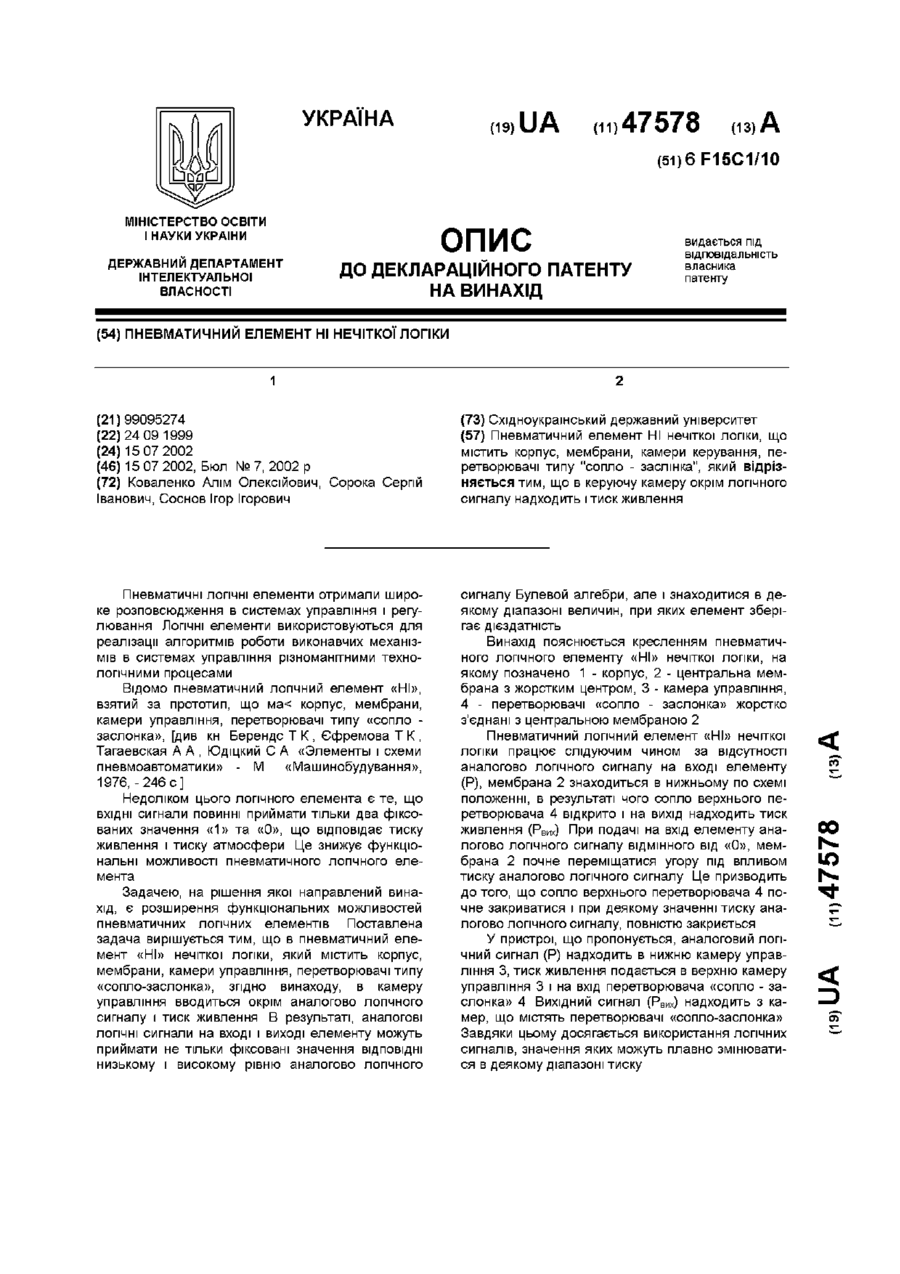
Пневматичний елемент НІ нечіткої логіки, що містить корпус, мембрани, камери керування, перетворювачі типу "сопло - заслінка", який відрізняється тим, що в керуючу камеру окрім логічного сигналу надходить і тиск живлення.
Пневматичний елемент “ні” нечіткої логіки
Номер патенту: 52913
Опубліковано: 15.01.2003
Автори: Соколова Яна Володимирівна, Коваленко Алім Олексійович, Баранич Юлія Вікторівна, Мушкаєв Ярослав Володимирович, Шакурова Катерина Володимирівна
МПК: F15C 1/00
Мітки: нечіткої, логіки, ні, пневматичний, елемент
Формула / Реферат:
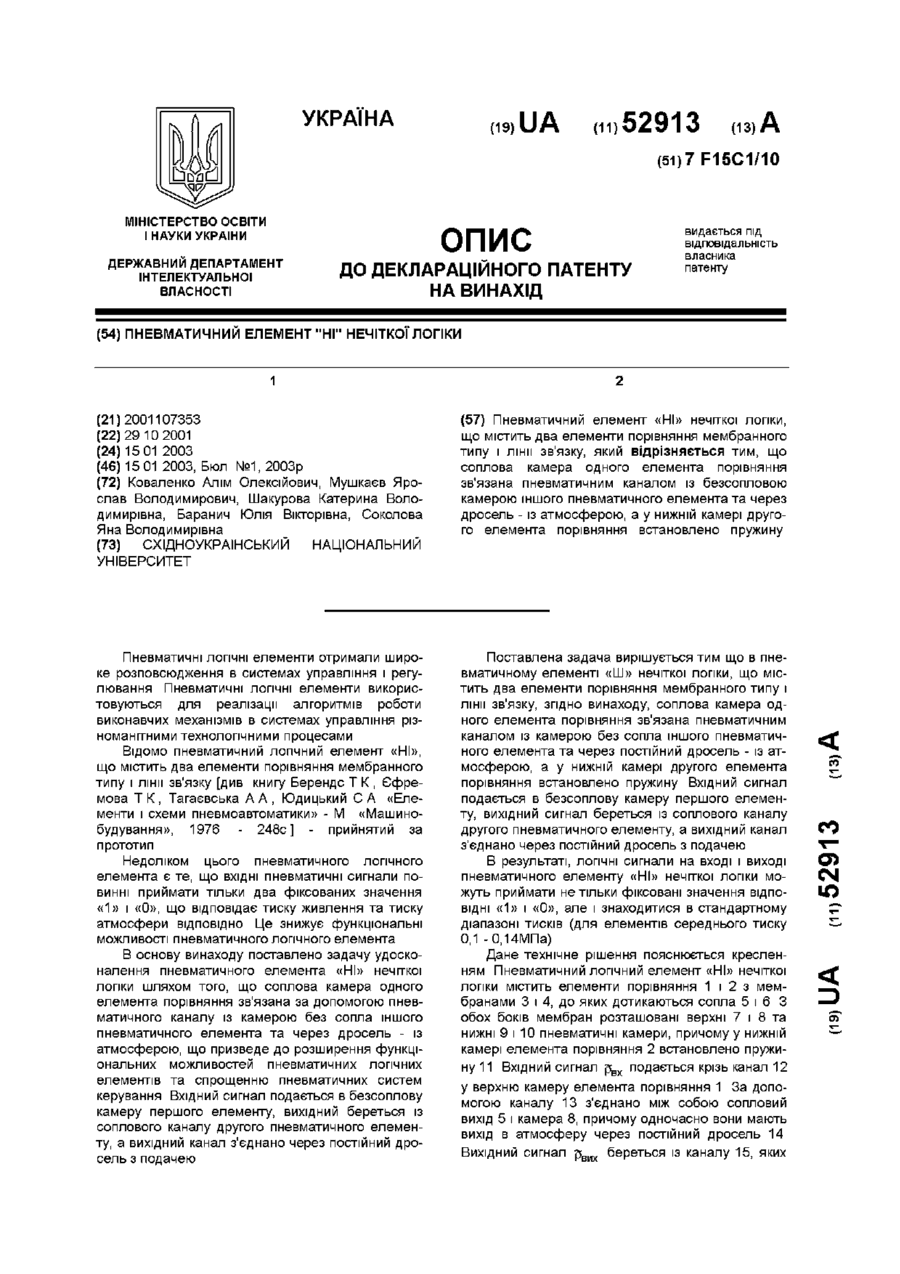
Пневматичний елемент «НІ» нечіткої логіки, що містить два елементи порівняння мембранного типу і лінії зв'язку, який відрізняється тим, що соплова камера одного елемента порівняння зв'язана пневматичним каналом із безсопловою камерою іншого пневматичного елемента та через дросель - із атмосферою, а у нижній камері другого елемента порівняння встановлено пружину.
Попередній патент: Спосіб дроблення неоднорідних гірських порід
Наступний патент: Опалювально-вентиляційний апарат роторного типу
Випадковий патент: Спосіб лікування хворих на вперше діагностований туберкульоз легень