Позиційний привід
Номер патенту: 64197
Опубліковано: 25.10.2011
Автори: Ночніченко Ігор Вікторович, Галецький Олександр Сергійович, Узунов Олександр Васильович

Формула / Реферат
1. Позиційний привід, що містить блок програмного керування (ПК) з електричними виходами, блок дискретного розподілення з електричним керуючими входами (ДРЕК), що має канали живлення, зливу та робочі канали, блок дозування робочої рідини (ДРР), що має канали нагнітання, зливу та робочі канали, блок реверса з електричними керуючими входами (РЕК), що має канали нагнітання, зливу та робочі канали, та виконавчий пристрій з рухомим елементом та двома робочими каналами, причому до каналів живлення та зливу блока ДРЕК приєднано відповідно вихід та вхід джерела живлення робочого тіла, робочі канали блока ДРЕК приєднано до робочих каналів блока ДРР, нагнітальний канал блока ДРР приєднано до каналу нагнітання блока РЕК, а зливний канал блока ДРР приєднано до каналу зливу блока РЕК, робочі канали блока РЕК приєднано до робочих каналів виконавчого пристрою, а електричні виходи блока ПК зв'язані з електричними керуючими входами блоків ДРЕК та РЕК, який відрізняється тим, що блок ДРЕК виконано у вигляді трипозиційного чотириканального розподільника, а блок ДРР виконано у вигляді мультиплікатора, функцію блока РЕК виконує трипозиційний чотириканальний гідророзподільник, а до зливного каналу блока ДРР приєднано підживлювальний бак.
2. Позиційний привід за п. 1, який відрізняється тим, що мультиплікатор виконано двотактним.
3. Позиційний привід за пп. 1, 2, який відрізняється тим, що рухомий елемент виконавчого пристрою зв'язано з датчиком положення, вихід якого приєднано до блока ПК.
Текст
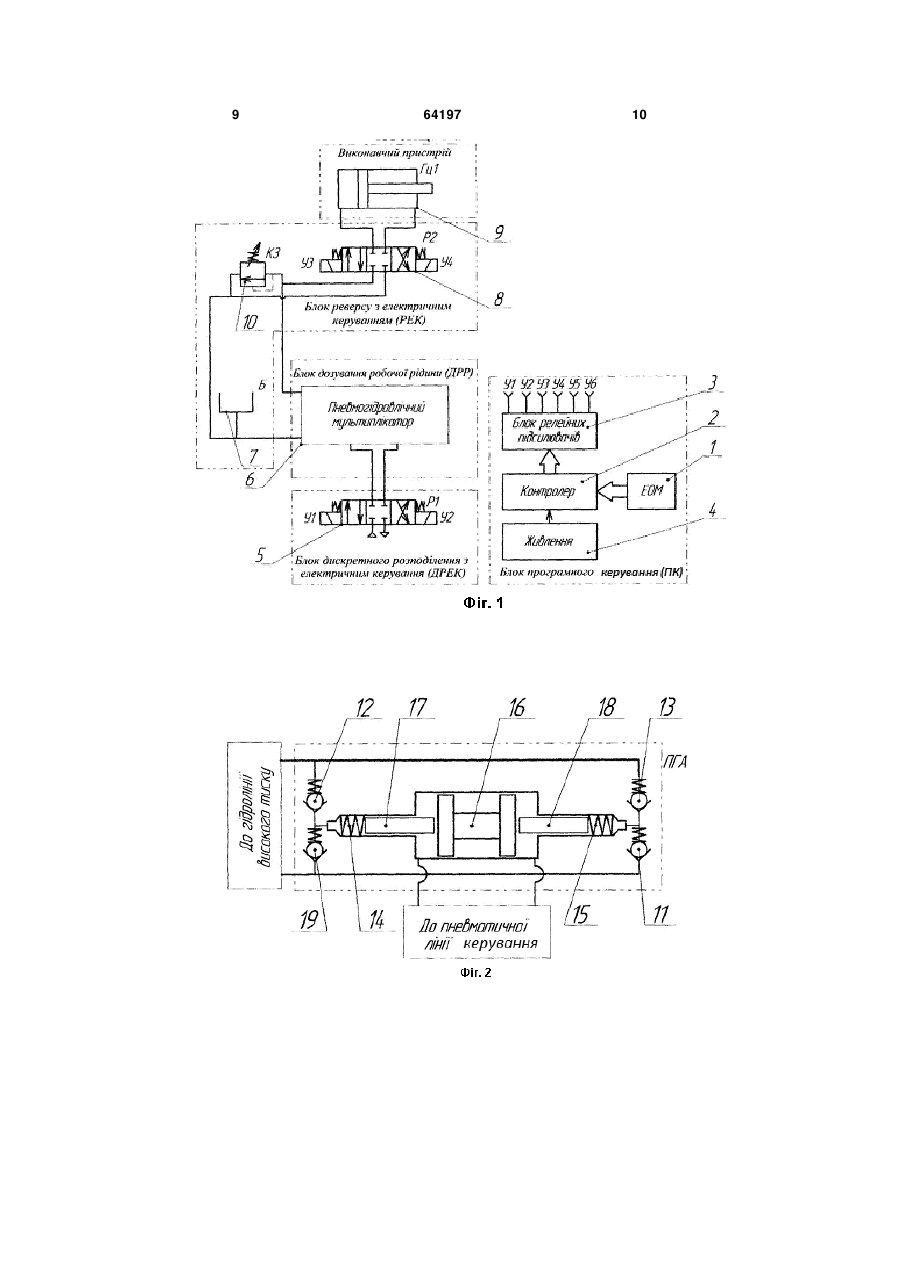
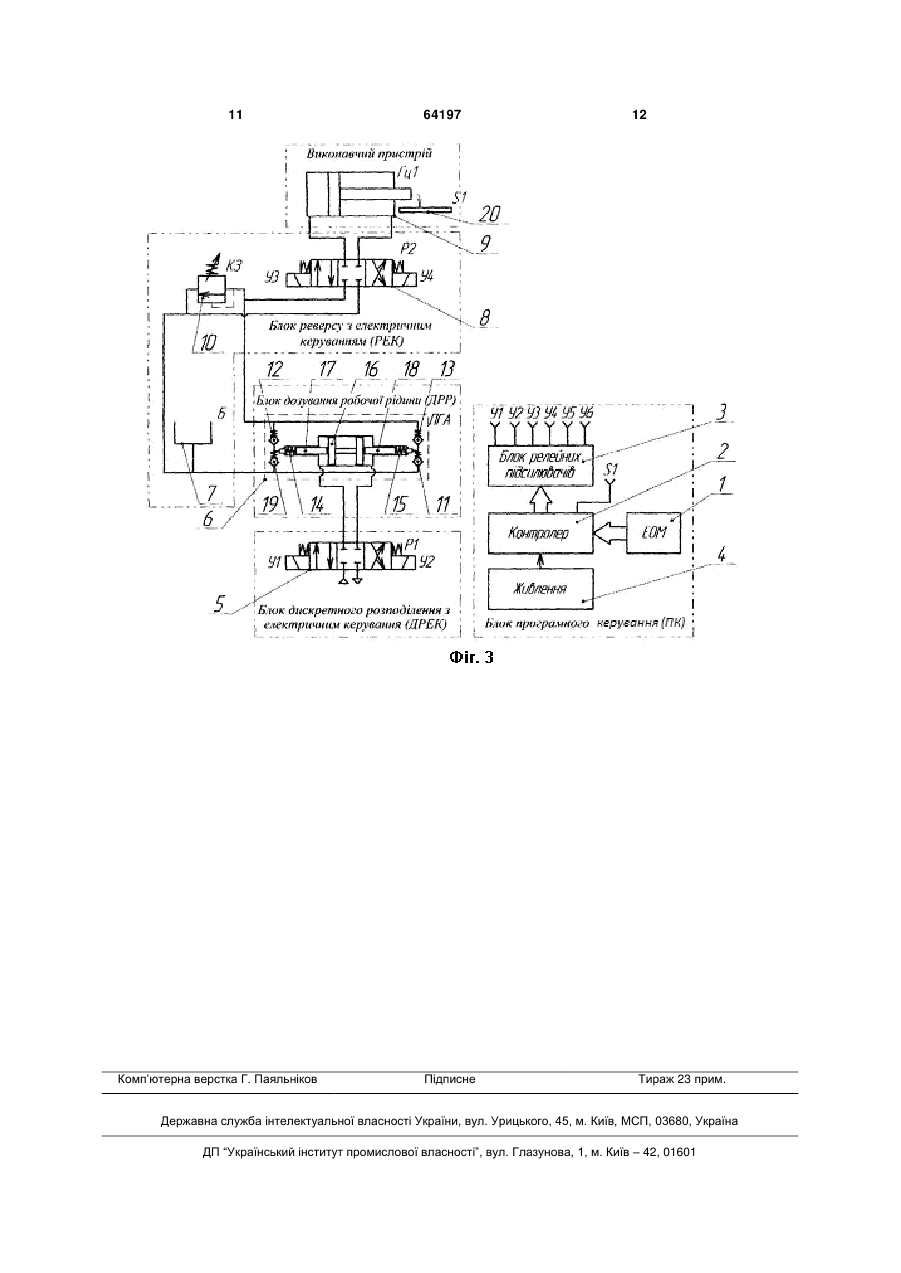
1. Позиційний привід, що містить блок програмного керування (ПК) з електричними виходами, блок дискретного розподілення з електричним керуючими входами (ДРЕК), що має канали живлення, зливу та робочі канали, блок дозування робочої рідини (ДРР), що має канали нагнітання, зливу та робочі канали, блок реверса з електричними керуючими входами (РЕК), що має канали нагнітання, зливу та робочі канали, та виконавчий пристрій з рухомим елементом та двома робочими каналами, причому до каналів живлення та зливу U 1 3 F15В7/00, опубл. 12.11.2007.]. Позиційний привід, що містить блок програмного керування (ПК) з електричними виходами, блок дискретного розподілення з електричним керуючими входами (ДРЕК), що має канали живлення, зливу та робочі канали, блок дозування робочої рідини (ДРР), що має канали нагнітання, зливу та робочі канали, блок реверсу з електричними керуючими входами (РЕК), що має канали нагнітання, зливу та робочі канали, та виконавчий пристрій з рухомим елементом та двома робочими каналами, причому до каналів живлення та зливу блока ДРЕК приєднано відповідно вихід та вхід джерела живлення робочого тіла, робочі канали блока ДРЕК приєднано до робочих каналів блока ДРР, нагнітальний канал блока ДРР приєднано до каналу нагнітання блока РЕК, а зливний канал блока ДРР приєднано до каналу зливу блока РЕК, робочі канали блока РЕК приєднано до робочих каналів виконавчого пристрою, а електричні виходи блока ПУ зв'язані з електричними керуючими входами блоків ДРЕК та РЕК, Недоліками цього приводу є: складний закон керування, низька і неоднакова точність позиціювання, складна конструктивна реалізація, мале зусилля на штоку виконавчого пристрою і його залежність від сигналу керування. Пояснюється це тим, що для позиціювання рухомого елементу виконавчого пристрою за об'ємним принципом, у блоці ДРР, використано розрядне керування, яке складне за конструкцією і логічною реалізацією тому, що потребує подачу робочої рідини від тієї або іншої комбінації керуючих камер блока ДРР з різним об'ємом робочої рідини до гідравлічної порожнини виконавчого пристрою відповідно до потрібної позиції рухомого елементу. Для керування керуючими камерами блока ДРР у блоці ДРЕК використовують значну кількість розподільників, що відповідає кількості керуючих камер, що також ускладнює конструкцію приводу. Низька і неоднакова точність приводу в залежності від потрібного положення рухомого елементу виконавчого пристрою обумовлена більшими розмірами поршнів керуючих камер першого розряду по відношенню до камер другого, третього і наступних вищих розрядів у блоці ДРР. Це обумовлено різними і більшими за величиною витоками крізь зазори у блоці ДРР, через більші розміри зазорів між поршнями і боковими стінками керуючих камер для більших керуючих розрядів. Мале і змінне зусилля на рухомому елементі виконавчого пристрою є наслідком малого значення співвідношення площ поршнів керуючих камер у блоці ДРР і площі поршня виконавчого пристрою і залежності зусилля від цього співвідношення, яке змінюється відповідно до розряду керуючої камери, яка активізується сигналом керування. В основу корисної моделі поставлена задача створення приводу з об'ємним принципом керування, що забезпечує: вищу точність і її незалежність від потрібної позиції рухомого елемента виконавчого пристрою, спрощення конструкції, збільшення зусилля на рухомому елементі виконавчого пристрою та забезпечення незалежності цього зусилля від сигналу керування за рахунок 64197 4 використання послідовного керування та введення додаткової мультиплікації за рахунок введення в блок ДРР мультиплікатора, використання розподільника в блоці ДРЕК, гідророзподільника в блоці РЕК та встановлення нових зв'язків між елементами позиційного приводу. Для цього позиційний привід містить блок програмного керування (ПК) з електричними виходами, блок дискретного розподілення з електричним керуючими входами (ДРЕК), що має канали живлення, зливу та робочі канали, блок дозування робочої рідини (ДРР), що має канали нагнітання, зливу та робочі канали, блок реверсу з електричними керуючими входами (РЕК), що має канали нагнітання, зливу та робочі канали, та виконавчий пристрій з рухомим елементом та двома робочими каналами, причому до каналів живлення та зливу блока ДРЕК приєднано відповідно вихід та вхід джерела живлення робочого тіла, робочі канали блока ДРЕК приєднано до робочих каналів блока ДРР, нагнітальний канал блока ДРР приєднано до каналу нагнітання блока РЕК, а зливнийканал блока ДРР приєднано до каналу зливу блока РЕК, робочі канали блока РЕК приєднано до робочих каналів виконавчого пристрою, а електричні виходи блока ПК зв'язані з електричними керуючими входами блоків ДРЕК та РЕК. Згідно з корисною моделлю блок ДРЕК виконано у вигляді трипозиційного чотириканального розподільника, а блок ДРР виконано у вигляді мультиплікатора, функцію блока РЕК виконує трипозиційний чотириканальний гідророзподільник, а до зливного каналу блока ДРР приєднано підживлювальний бак. Згідно з корисною моделлю мультиплікатор виконано двотактним. Виконання блока ДРР позиційного приводу у вигляді мультиплікатора замість набору керуючих камер забезпечує всмоктування робочої рідини з зливного каналу мультиплікатора (блока ДРР), її дозування і подачі цих доз до нагнітального каналу мультиплікатора (блока ДРР). Це забезпечується завдяки зворотно-поступальному руху поршня мультиплікатора за рахунок послідовного приєднання робочих каналів мультиплікатора за допомогою розподільника блока ДРЕК до вихідного та вхідного каналів джерела живлення. Дози робочої рідини з виходу блока ДРР послідовно подаються до порожнини виконавчого пристрою, що забезпечує рух і позиціювання його рухомого елемента. Використання послідовного закону керування забезпечує однакову точність позиціювання незалежно від потрібної позиції рухомого елемента виконавчого пристрою, а також збільшення зусилля на рухомому елементі виконавчого пристрою і його незалежність від закону керування. Виконання блока ДРЕК у вигляді трипозиційного чотириканального розподільника, а блока РЕК у вигляді трипозиційного чотириканального гідророзподільника дозволяє спростити конструкцію позиційного приводу. Приєднання до зливного каналу блока ДРР підживлювального бака забезпечує збереження роботоспроможності приводу у разі використання виконавчого пристрою як з од 5 ностороннім, так і двостороннім штоком, а також у разі наявності витоків робочої рідини. Більше зусилля в порівнянні з прототипом, при однаковому з ним значенні тиску живлення, досягається за рахунок введення додаткової мультиплікації (забезпечення відповідного співвідношення площ торцевих поверхонь поршня мультиплікатора та його плунжерів), а незалежність зусилля від закону керування забезпечується незмінністю коефіцієнта мультиплікації за рахунок використання плунжерів одного діаметра. Виконання блока ДРР позиційного приводу у вигляді двотактного мультиплікатора замість набору керуючих камер забезпечує всмоктування робочої рідини з зливного каналу мультиплікатора (блока ДРР), її дозування і подачі цих доз до нагнітального каналу мультиплікатора (блока ДРР). Це забезпечується завдяки зворотно-поступальному руху поршня мультиплікатора за рахунок послідовного приєднання робочих каналів мультиплікатора за допомогою розподільника блока ДРЕК до вихідного та вхідного каналів джерела живлення. Дози робочої рідини з виходу блока ДРР послідовно подаються до порожнини виконавчого пристрою, що забезпечує рух і позиціювання його рухомого елементу. Виконання мультиплікатора двотактним дозволяє одночасно з використанням порції робочої рідини з першої плунжерної камери, яка забезпечує роботу першого такту, заповнювати порожнину другої плунжерної камери для підготовки порції робочої рідини для роботи на другому такті, що збільшує досяжну швидкість руху рухомого елементу у два рази в порівнянні з однотактним мультиплікатором. Згідно з корисною моделлю рухомий елемент виконавчого пристрою зв'язано з датчиком положення, вихід якого приєднано до блока ПК. Застосування датчика положення забезпечує додаткове підвищення точності позиціювання приводу за рахунок подачі корегувального сигналу від системи керування при наявності розбіжності між потрібним і дійсним положеннями рухомого елемента. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 наведено схему позиційного приводу за п. 1 формули; фіг. 2 - схема приводу з датчиком положення рухомого елемента виконавчого пристрою за п. 2 формули. Позиційний привід (фіг. 1) по першому варіанту виконання пристрою містить блок програмного керування (ПК); блок дискретного розподілення з електричним керуванням (ДРЕК), блок дозування робочої рідини (ДРР); блок реверсу з електричним керуванням (РЕК) та виконавчий пристрій. Блок програмного керування (ПК) складається з ЕОМ 1, що зв'язана, на період програмування, з контролером 2. Контролер зв'язаний з блоком релейних підсилювачів 3 та джерелом живлення 4. Виходи релейного підсилювача блока ПК зв'язані з чотириканальним трипозиційним розподільником 5 блока ДРЕК та гідророзподільником 8 блока РЕК. Робочі канали розподільника 5 зв'язані з робочими каналами мультиплікатора 6 блока ДРР, що може бути виконаний як однотактним (на кресленні не показаний), так і двотактним. Нагнітальний та зли 64197 6 вний канали мультиплікатора блока ДРР зв'язані відповідно з нагнітальним і зливним каналами гідророзподільника 8 блока РЕК, а його робочі канали приєднано до робочих каналів виконавчого пристрою 9, а в зливний канал блока ДРР підключено підживлювальний бак 7. Нагнітальний канал блока ДРР зв'язано зі зливним каналом блока ДРР через запобіжний клапан 19. На фіг. 2 приведена схема приводу по першому варіанту виконання пристрою, що відрізняється від схеми на фіг. 1 додатково введеним датчиком положення 20. Датчик зв'язаний з рухомим елементом виконавчого пристрою 9, що контролює його положення та передає інформацію про стан на блок ПК. Позиційний привід працює наступним чином. У блоці ПК за допомогою ЕОМ 1 програмують контролер 2, який відповідно до програми керує блоком релейних підсилювачів 3, виходи якого з'єднані з входами електричного керування розподільників 5 та 8 блоків ДРЕК та РЕК. У вихідному стані розподільники 5 та 8 знаходяться в середньому положенні, а поршень та два плунжера двотактного мультиплікатора 6 блока ДРР знаходяться в лівому крайньому положенні, рухомий елемент виконавчого пристрою втягнуто. При подачі сигналу з релейного підсилювача 3 на електромагніти Y1 та Y3 розподільник 5 і гідророзподільник 8 переходять у крайнє ліве положення. Стиснене робоче тіло подається в ліву вхідну робочу камеру двотактного мультиплікатора 6, в результаті чого відбувається переміщення його поршня 16, який переміщує плунжер 18, що стискає пружину 15 і відповідно робочу рідину, яка подається через зворотний клапан 13, в нагнітальний канал блока ДРР, при цьому зворотні клапани 11 та 12 закриті, а через зворотний клапан 10 робоча рідина всмоктується, завдяки пружині 14, що переміщує плунжер 17 вправо і створює розрідження в плунжерній камері. Стиснена рідина, що проходить через зворотний клапан 13, через розподільник 8 блока РЕК подається в поршневу порожнину виконавчого пристрою 9, що спричиняє переміщення рухомого елементу виконавчого пристрою на величину, яка пропорційна об'єму витісненої рідини з плунжерної камери двотактного мультиплікатора. Рідина, що витискується з штокової порожнини виконавчого пристрою через гідророзподільник 8 блока РЕК, подається у зливний канал двотактного мультиплікатора 6, що через зворотний клапан 10 потрапляє в плунжерну камеру плунжера 17. При знятті сигналу з електромагніта Y1 і поданні сигналу на електромагніт Y2, розподільник 5 блока ДРЕК переходить в крайнє праве положення. Це призводить до підводу стисненого повітря до правої робочої камери двотактного мультиплікатора 6, а його ліва робоча камера сполучається зі зливом. Внаслідок цього поршень 16 починає рухатися вліво і переміщує плунжер 17 та стискає пружину 14, витискуючи робочу рідину через клапан 12 в нагнітальний канал блока ДРР, при цьому пружина 15 діє на плунжер 18 і через клапан 11 робоча рідина заповнює плунжерну робочу камеру. Клапани 10 і 13 закриті. Далі рух робочої рідини по нагніта 7 льному та зливному каналам блока ДРР відбувається так само як описано вище. При відпрацюванні заданої кількості імпульсів керування, завдяки роботі електромагнітів Y1 та Y2 розподільника 5 і двотактного мультиплікатора, через нагнітальний канал порції робочої рідини під тиском будуть подаватися у порожнину виконавчого пристрою, що буде призводити до позиціювання рухомого елементу виконавчого пристрою 9 у потрібну позицію. При цьому швидкість руху рухомого елементу буде відповідати частоті слідування імпульсів, які подаються на електромагніти Y1 та Y2. При використанні у позиційному приводі датчика положення 20 сигнал від нього використовується для формування корегувального керуючого сигналу на привід в залежності від дійсного положення рухомого елементу в порівнянні з бажаним положенням. Напрямок руху штока виконавчого пристрою змінюється при перемиканні електромагнітів Y3 та Y4 гідророзподільника 8 блока РЕК. Запобіжний клапан 19 запобігає пошкодженню каналів та апаратів позиційного приводу при значному навантаженні на рухомому елементі. При збільшенні тиску вище максимального клапан 19 скидає частину робочої рідини у зливний канал, що призводить до зменшення тиску. Перевагами запропонованого приводу є спрощена конструкція, за рахунок зменшення кількості елементів та спрощення закону керування, більш досяжне зусилля на рухомому елементі, його незалежність від керуючого сигналу та більша точність позиціювання. Двотактна дія мультиплікатора забезпечує заповнення робочою рідиною одної плунжерної камери при одночасній подачі рідини з іншої плунжерної камери, що дозволяє отримати більшу в порівнянні з прототипом швидкість руху штока і плавність ходу. Дискретність позиційного приводу при прямому ході обчислюється за залежністю: 64197 8 H' hf , SП де h - хід плунжера мультиплікатора, що дорівнює ходу його поршня; f - площа плунжера мультиплікатора; SП - площа поршня виконавчого пристрою в поршневій камері. Зусилля, що виникає на рухомому елементі, при прямому ході, виконавчого пристрою, розраховується з рівняння: p f ' FШТ вх nn SП pвc SШП , f де pвх - тиск в пневматичній лінії; fnn - площа поршня мультиплікатора, pвc - тиск всмоктування мультиплікатора, SШП - площа поршня виконавчого пристрою в штоковій порожнині. Дискретність та зусилля при зворотному ході визначають аналогічно: hf H'' ; SШП pвх fnn SШП pвc SП . f Таким чином, запропонована схема позиційного приводу забезпечує позиціювання робочого органу з більшою точністю, незалежності цієї точності від потрібної позиції штока виконавчого пристрою, підвищення швидкості руху штока виконавчого пристрою, спрощення конструкції, збільшення зусилля та забезпечення його незалежності від сигналу керування, що вирішує поставлену технічну задачу. ' FШТ 9 64197 10 11 Комп’ютерна верстка Г. Паяльніков 64197 Підписне 12 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPosition drive
Автори англійськоюUzunov Oleksandr Vasyliovych, Haletskyi Oleksandr Serhiiovych, Nochnichenko Ihor Viktorovych
Назва патенту російськоюПозиционный привод
Автори російськоюУзунов Александр Васильевич, Галецкий Александр Сергеевич, Ночниченко Игорь Викторович
МПК / Мітки
МПК: F15B 9/00
Мітки: позиційний, привід
Код посилання
<a href="https://ua.patents.su/6-64197-pozicijjnijj-privid.html" target="_blank" rel="follow" title="База патентів України">Позиційний привід</a>
Гідравлічний привід робочих органів машини
Номер патенту: 7462
Опубліковано: 15.06.2005
Автори: Рибалко Вячеслав Миколайович, Ярошенко Володимир Федорович, Шостак Анатолій Вікторович, Ловейкін Вячеслав Сергійович
МПК: A01D 69/00
Мітки: робочих, гідравлічний, органів, привід, машини
Формула / Реферат:
Гідравлічний привід робочих органів машини, що містить гідравлічний насос, гідравлічний бак з робочою рідиною, виконуючі гідроциліндри, гідромотори, розподілювач потоку рідини, запобіжний і переливний клапани, фільтри, напірний та зливний трубопроводи, шланги і рукави, який відрізняється тим, що в напірному трубопроводі додатково вмонтовано датчик тиску робочої рідини та двопозиційний розподілювач з керуванням електромагнітом за допомогою...
Слідкуючий електрогідравлічний привід
Номер патенту: 69233
Опубліковано: 16.08.2004
Автори: Кулік Анатолій Степанович, Лученко Олег Олексійович, Таран Олександр Миколайович, Нарожний Віталій Васильович, Фірсов Сергій Миколайович
МПК: F15B 9/00
Мітки: привід, слідкуючий, електрогідравлічний
Формула / Реферат:
Слідкуючий електрогідравлічний привід, який складається з послідовно з'єднаних задатчика, порівнюючого пристрою, гідропідсилювача і виконавчого гідродвигуна з потенціометром зворотного зв'язку, підключеного через буферний блок фазової корекції до порівнюючого пристрою та схеми корекції, підключеної через перемикаючий пристрій до гідропідсилювача, який відрізняється тим, що до схеми додано блок діагностування потенціометра зворотного зв'язку,...
Привід гідравлічного ковальського преса
Номер патенту: 17617
Опубліковано: 16.10.2006
Автори: Шинкаренко Олег Михайлович, Корчак Олена Сергіївна
МПК: B21J 9/00
Мітки: преса, привід, ковальського, гідравлічного
Формула / Реферат:
Привід гідравлічного ковальського преса, що містить робочі, зворотні та зрівноважувальні циліндри, траверсу, стіл преса, наповнювально-зливний клапан з сервоприводом, наповнювально-зливний бак, акумулятор, гідророзподільники керування робочими та зворотними циліндрами з регулюючими клапанами та системою керування їх дією, систему гідроліній, який відрізняється тим, що наповнювально-зливний клапан оснащений індивідуальним слідкуючим...
Привід генератора спеціального призначення
Номер патенту: 59150
Опубліковано: 15.08.2003
Автор: Гільов Олександр Олександрович
МПК: H02K 33/00
Мітки: генератора, привід, спеціального, призначення
Формула / Реферат:
1. Привід генератора спеціального призначення, що складається з рукоятки, мультиплікатора і регулятора обертів , який відрізняється тим, що між рукояткою і мультиплікатором розміщений пружинний нагромаджувач мускульної енергії з храповим механізмом.2. Привід генератора по п. 1, який відрізняється тим, що пружини нагромаджувача з'єднані послідовно за схемою "початок - кінець".
Гідравлічний привід преса від відцентрового насоса
Номер патенту: 10213
Опубліковано: 15.11.2005
Автори: Корчак Олена Сергіївна, Роганов Лев Леонідович, Роганов Максим Львович
МПК: B30B 15/16
Мітки: насоса, відцентрового, гідравлічний, преса, привід
Формула / Реферат:
Гідравлічний привід преса від відцентрового насоса, що містить мультиплікатор, робочий та зворотні циліндри, наповнювальний бак, наповнювально-зливний клапан, розподільник керування, трубопроводи, який відрізняється тим, що підпоршнева порожнина гідравлічного мультиплікатора зв'язана через чотириклапанний розподільник з відцентровим насосом низького тиску, надпоршнева - зі зливом, а штокова - з робочим циліндром через наповнювально-зливний...
Попередній патент: Спосіб визначення фунгіцидів класу триазолів у повітрі
Наступний патент: Малогабаритна голографічна установка
Випадковий патент: Пристрій для кріплення скляних панелей до конструкції будівлі при безрамному заскленні