Система контролю і керування шахтною підйомною установкою
Номер патенту: 101731
Опубліковано: 25.04.2013
Автори: Молчанов Сергій Юрійович, Кодолов Едуард Вікторович, Максимов Євген Валерійович, Смовж Олександр Леонідович
Формула / Реферат
1. Система контролю і керування шахтною підйомною установкою, що включає центральний процесорний блок з функціями забезпечення завдання, керування, індикації параметрів та реєстрації збереження і відтворення архівної інформації про роботу системи, датчики положення посудин, блок визначення положення посудин і напрямку руху, блок контролю і керування електроприводом шахтної підйомної установки з датчиками вимірювання струму і напруги, блок визначення завантаження підйомної установки, блок самодіагностики, графічний інтерфейс для відображення на моніторі інформації про параметри системи у формі мнемосхеми, яка відрізняється тим, що додатково містить блок контролю і керування завантаженням гірничої маси в бункер дозатора, блок керування і контролю рівня заповнення розвантажувального бункера, блок шахтної стволової сигналізації та зв'язку, що включає інтерфейс з функціями забезпечення обміну інформаційними посилками з усіма блоками та пристроями системи, пристрої голосового двостороннього гучномовного зв'язку та пристрої сигналізації горизонту, до яких підключені датчики контролю стану стволового обладнання на горизонті, при цьому блок контролю і керування завантаженням гірничої маси в бункер дозатора містить пристрій вимірювання ваги гірничої маси в бункері дозатора і пристрій керування дозатором, а блок керування і контролю рівня заповнення розвантажувального бункера містить пристрій вимірювання рівня гірничої маси в розвантажувальному бункері і пристрій формування сигналів попередження про досягнення контрольних рівнів заповнення розвантажувального бункера.
2. Система за п. 1, яка відрізняється тим, що блок керування і контролю рівня заповнення розвантажувального бункера як пристрій вимірювання рівня гірничої маси в розвантажувальному бункері містить пристрій безконтактного зчитування рівня гірничої маси в розвантажувальному бункері, наприклад ультразвуковий датчик рівня.
3. Система за п. 1, яка відрізняється тим, що блок визначення завантаження підйомної установки виконано з можливістю контролю ваги гірничої маси в посудині, що рухається на підйом, і розрахунку ваги гірничої маси, що залишилася в посудині, що рухається на спуск, з подальшим формуванням відповідних інформаційних і керуючих посилок у блок контролю і керування завантаженням гірничої маси в бункер дозатора.
4. Система за п. 1, яка відрізняється тим, що датчики контролю стану стволового обладнання на горизонті містять датчики точного зупину, стану стволових дверей, кулаків, ляд, майданчиків, що гойдаються, гальмівних і врівноважуючих канатів.
5. Система за п. 1, яка відрізняється тим, що графічний інтерфейс для відображення на моніторі інформації про параметри системи містить програмний засіб для екранної форми основної мнемосхеми технологічного процесу Шахтної Підйомної Установки ШПУ та екранних форм детального стану окремих цільових параметрів системи.
6. Система за п. 5, яка відрізняється тим, що як окремі цільові параметри системи відображають наступну інформацію: режим роботи системи, швидкість підйомної установки, положення посудин у стволі шахти, ваги гірничої маси, що завантажена в посудину, стан дозатора, стан розвантажувального бункера, стан ланцюга гальма запобіжного, струм і напругу двигунів і генераторів підйомної установки, інформацію про продуктивність ШПУ за будь-який проміжок часу.
Текст
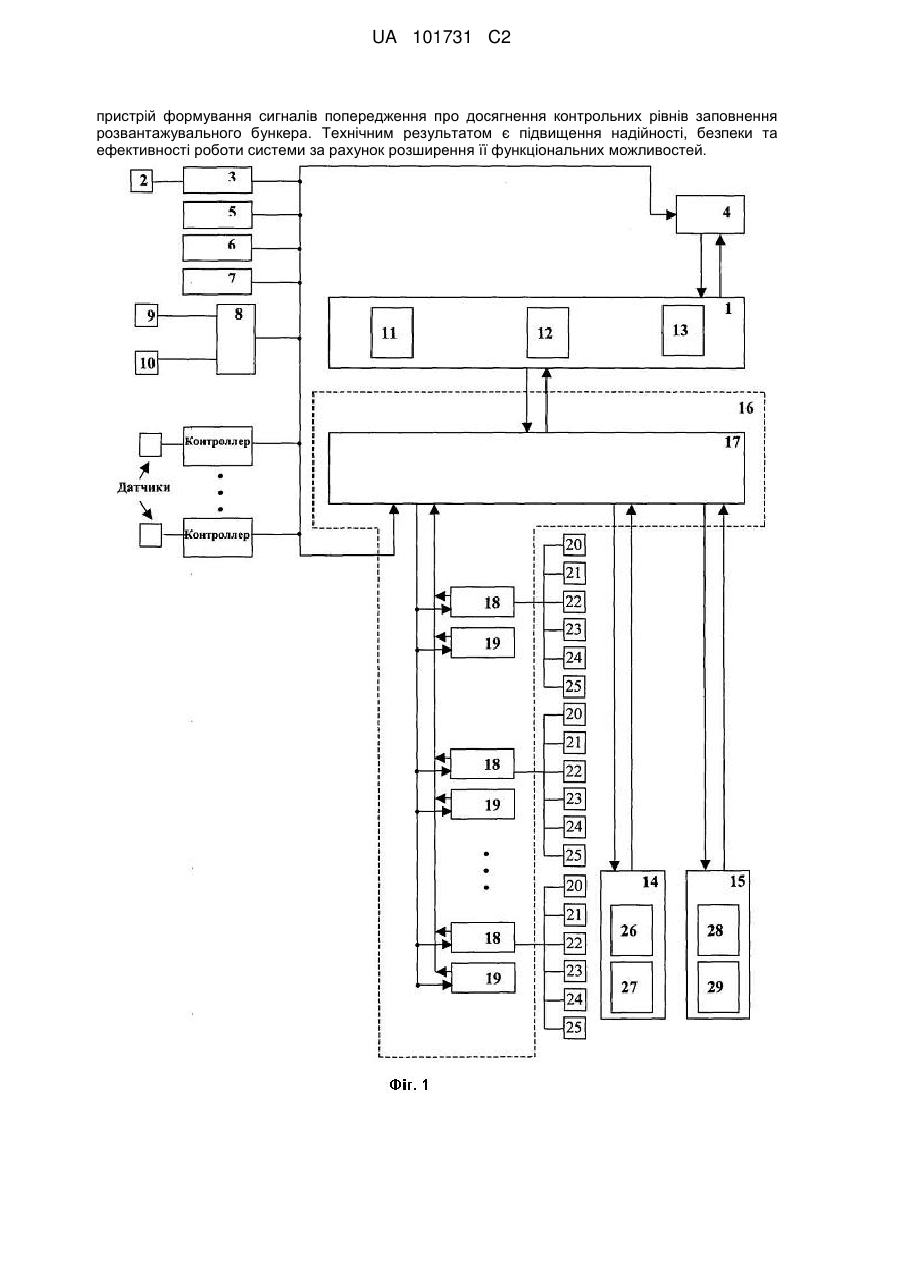
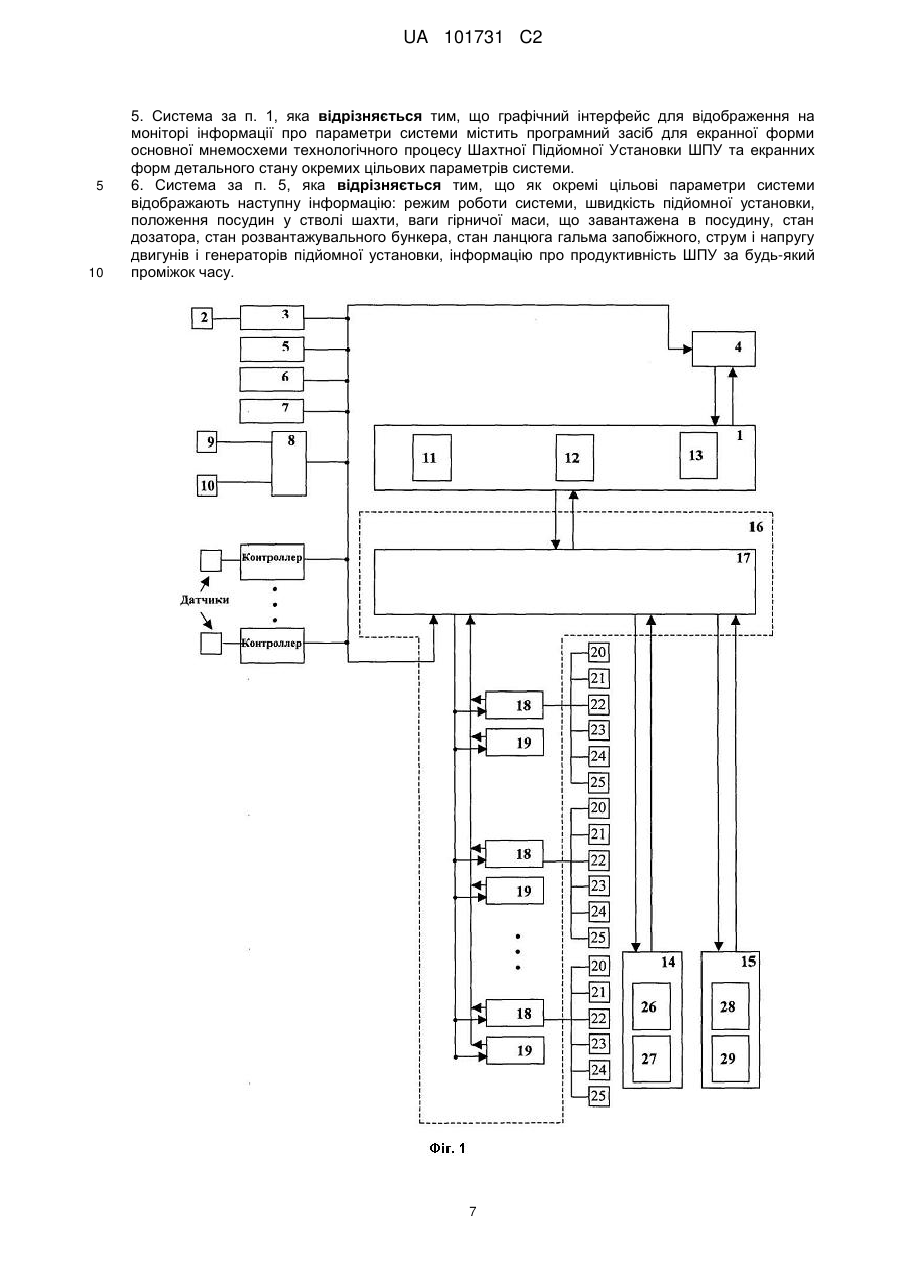
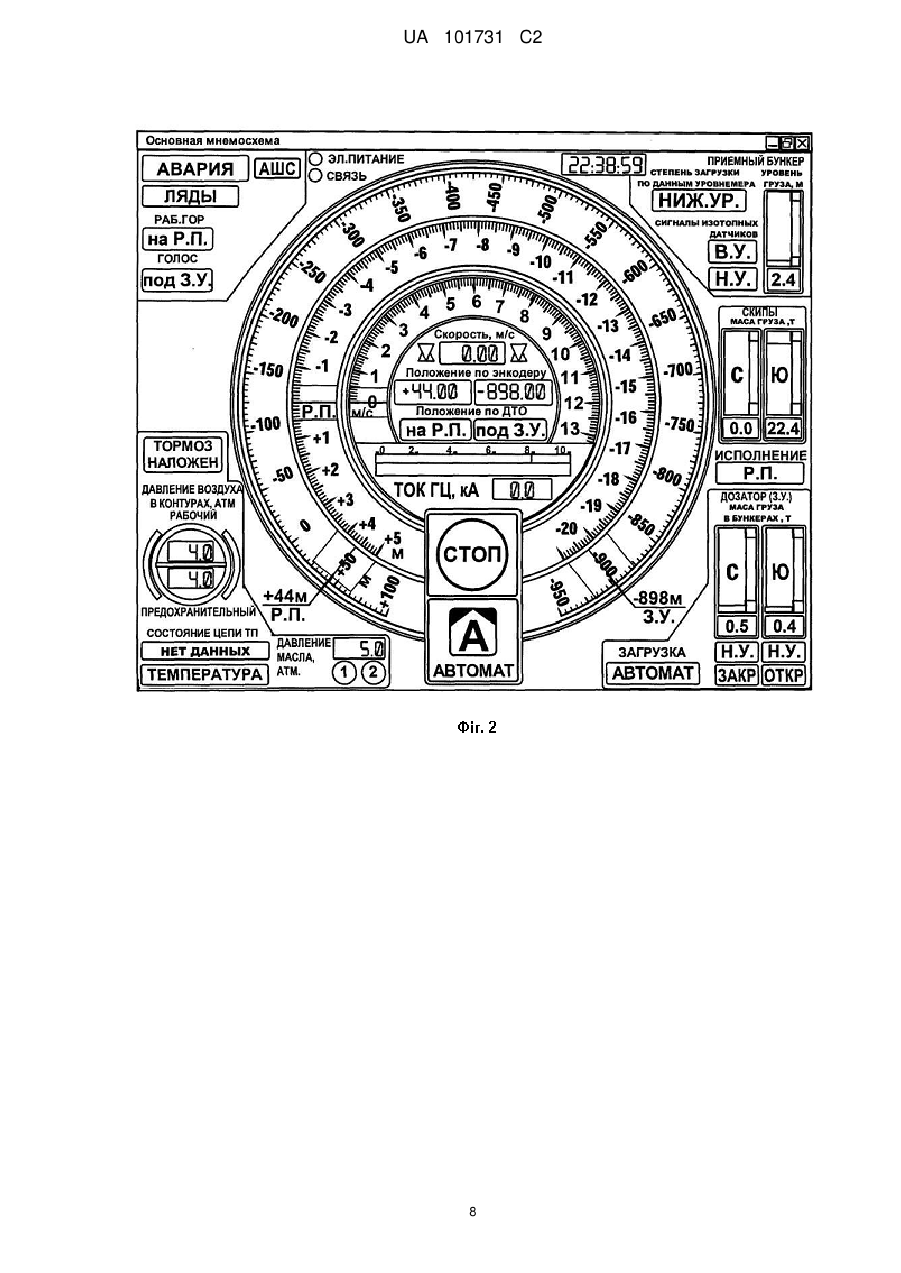
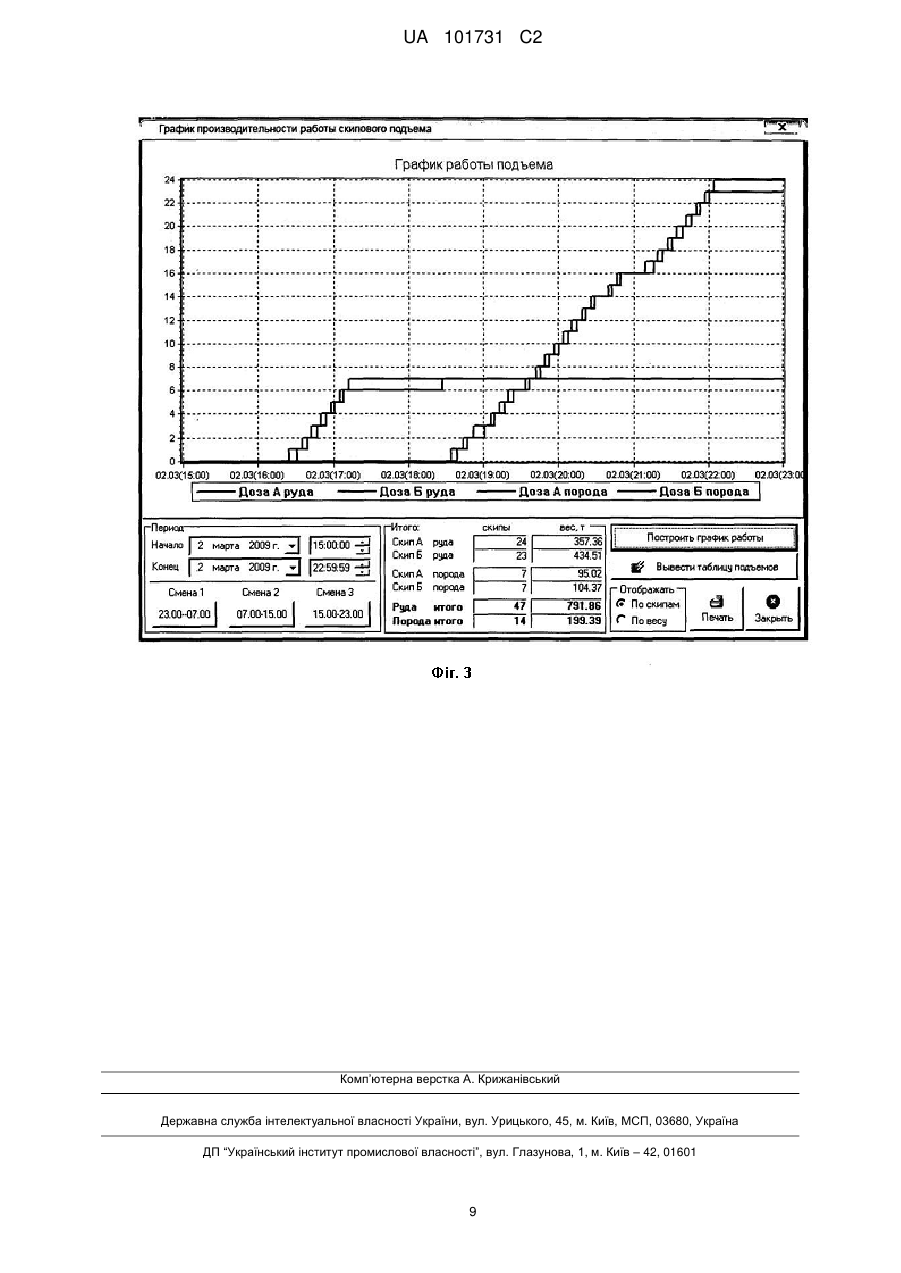
Реферат: Система контролю і керування шахтною підйомною установкою належить до керування підйомниками, зокрема до автоматизованих систем керування контролю та технологічних захистів шахтної підйомної установки. Система містить центральний процесорний блок з функціями забезпечення завдання, керування, індикації параметрів та реєстрації збереження і відтворення архівної інформації про роботу системи, датчики положення посудин блок визначення положення посудин і напрямку руху, блок контролю і керування електроприводом шахтної підйомної установки з датчиками вимірювання струму і напруги, блок визначення завантаження підйомної установки, блок самодіагностики, графічний інтерфейс для відображення на моніторі інформації про параметри системи у формі мнемосхеми, блок контролю і керування завантаженням гірничої маси в бункер дозатора, блок керування і контролю рівня заповнення розвантажувального бункера, блок шахтної стволової сигналізації та зв'язку, що включає інтерфейс з функціями забезпечення обміну інформаційними посилками з усіма блоками та пристроями системи, пристрій голосового двостороннього гучномовного зв'язку та пристрої сигналізації горизонту, до яких підключені датчики контролю стану стволового обладнання на горизонті. Блок контролю і керування завантаженням гірничої маси в бункер дозатора містить пристрій вимірювання ваги гірничої маси в бункері дозатора і пристрій керування дозатором. Блок керування і контролю рівня заповнення розвантажувального бункера містить пристрій вимірювання рівня гірничої маси в розвантажувальному бункері і UA 101731 C2 (12) UA 101731 C2 пристрій формування сигналів попередження про досягнення контрольних рівнів заповнення розвантажувального бункера. Технічним результатом є підвищення надійності, безпеки та ефективності роботи системи за рахунок розширення її функціональних можливостей. UA 101731 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі управління підйомниками, зокрема до автоматизованих систем управління контролю та технологічних захистів шахтної підйомної установки (ШПУ). Необхідність комплексної автоматизації сучасного шахтного виробництва виникла внаслідок особливої технологічної важливості поряд з високими показниками ефективності максимально забезпечити рівень безпеки. Одним з основних вимог до подібних об'єктів в даний час є широкий обсяг функцій системи автоматичного управління, що дозволяє забезпечити належні параметри безпеки та ефективності ШПУ, у тому числі і для зниження впливу людського фактора. Для цієї мети в область контролю, візуалізації та управління системи слід включати якнайбільше необхідних параметрів стану обладнання на всіх робочих горизонтах протягом усього циклу роботи ШПУ - від моменту дозування гірничої маси у посудину (скіп) підйомної машини на горизонті, де розташований дозатор, до моменту розвантаження посудини (скіпу) в розвантажувальний бункер з подальшою евакуацією гірничої маси за межі ШПУ. Відома система контролю і управління шахтною підйомною установкою згідно з SU А.с. № 765173 від 09.11.1978 р. МПК В66В 1/ 06 "Цифровое устройство для автоматического управления движением шахтной подъемной машины", що включає блок керування з функціями завдання тахограми руху підйомної машини (період розгону, рівномірного руху і уповільнення), блок запуску підйомної установки, блок управління гальмуванням, датчик шляху для формування сигналів проходження підйомними посудинами одиничних відрізків шляху, схему порівняння реальних параметрів руху завантаженої посудини ШПУ в заданих відрізках шляху з параметрами заданої тахограми, схему формування сигналів неузгодженості для блока управління, який корегує програму завдання швидкості руху. Таким чином, відома система формує керуючий сигнал корекції швидкості руху підйомної установки, як функції параметра (лінійної координати) шляху, розділеного на певні ділянки. У результаті реальну, виміряну на певній ділянці шляху швидкість обертання приводу підйомної машини, шляхом керуючого впливу наближають до заданої, відповідно до тахограми. Пристрій дозволяє контролювати зниження фактичної швидкості руху підйомної машини нижче допустимої і перевищення швидкості руху вище допустимої на кожній з ділянок шляху руху. Рішення направлено на підвищення безпеки роботи ШПУ. Очевидним недоліком відомої системи є її недостатні функціональні можливості. Це полягає у відсутності контролю багатьох параметрів, які впливають на надійність і безпеку роботи ШПУ, наприклад - ваги гірничої маси в посудині (скіпу), процесу дозування гірничої маси та його розвантаження, електричних параметрів підйомної установки. Відома система контролю і управління шахтною підйомною установкою згідно з патентом RU № 2010766 від 15.04.1994 р. МПК В66В 1/28 "Устройство для управления шахтной подъемной установкой". Відоме технічне рішення включає блок вимірювання швидкості обертання приводу, блок вимірювання положення посудини в стовбурі шахти, блок вибору напрямку руху, блок управління пусковим і гальмівним механізмами підйомної машини, блок вимірювання величини крутного моменту на валу двигуна підйомної установки і блок керування швидкості руху підйомної установки. Відома система формує керуючий вплив на швидкість обертання приводу підйомної установки в залежності від величини крутного моменту на валу двигуна. Це дозволяє деякою мірою оптимізувати енергоспоживання за рахунок регулювання навантаження підйомної установки з урахуванням періодів більшого чи меншого навантаження на електроенергетичну систему, однак не вирішує багатьох проблем надійності і безпеки, пов'язаних з контролем та управлінням навантаженням, підйомом і розвантаженням гірничої маси. Відома система контролю і управління шахтною підйомною установкою згідно з патентом RU № 2314990 від 10.07. 2007 р. МПК В66В 5/04, В66В 1/24 "Устройство управления, контроля движения и технологических защит шахтной подъемной установки" (найближчий аналог). Відома система включає центральний блок управління, блок контролю електричних параметрів підйомної установки, блок визначення положення посудин і вибору напрямку руху, блок управління гальмуванням, блок визначення електричних параметрів двигуна підйомної машини, при якому посудина вважається навантаженою, блок контролю і управління швидкістю підйомної установки, блок самодіагностики, блок реєстрації, зберігання і відтворення архівної інформації про роботу системи, графічний інтерфейс для відображення на моніторі інформації про параметри системи у формі мнемосхеми. Відома система, в порівнянні з вищерозглянутими аналогами, має більш широкі функціональні можливості. Проте функціональні можливості відомої системи не дозволяють контролювати і, що особливо важливо, керувати процесами дозування гірничої маси у посудину (скіп) на горизонті і 1 UA 101731 C2 5 10 15 20 25 30 35 40 45 50 55 60 розвантаження посудини на підставі інформації про стан розвантажувального бункера. Відсутність таких функцій знижує рівень безпеки та ефективності ШПУ. Крім того, у відомій системі не передбачено постійний контроль за станом технологічного обладнання на всіх робочих горизонтах (стволового обладнання) і відображення цієї інформації на мнемосхемі, що також знижує інформативність системи і знижує рівень безпеки ШПУ. Задачею цього винаходу є підвищення надійності, безпеки та ефективності роботи системи контролю та управління шахтної підйомної установкою за рахунок розширення її функціональних можливостей. Поставлена задача вирішується тим, що система контролю і управління шахтною підйомною установкою, що включає центральний процесорний блок з функціями забезпечення завдання, управління, індикації параметрів та реєстрації, збереження і відтворення архівної інформації про роботу системи, датчики положення посудин, блок визначення положення посудин і напрямку руху, блок контролю і управління електроприводом шахтної підйомної установки з датчиками вимірювання струму і напруги, блок визначення завантаження підйомної установки, блок самодіагностики, графічний інтерфейс для відображення на моніторі інформації про параметри системи у формі мнемосхеми, згідно з винаходом, додатково містить блок контролю і управління завантаженням гірничої маси в бункер дозатора, блок управління і контролю рівня заповнення розвантажувального бункера, блок шахтної стволової сигналізації та зв'язку, що включає інтерфейс з функціями забезпечення обміну інформаційними посилками з усіма блоками та пристроями системи, пристрої голосового двостороннього гучномовного зв'язку та пристрої сигналізації горизонту, до яких підключені датчики контролю стану стволового обладнання на горизонті, при цьому блок контролю і управління завантаженням гірничої маси в бункер дозатора, включає пристрій вимірювання ваги гірничої маси в бункері дозатора і пристрій управління дозатором, а блок управління і контролю рівня заповнення розвантажувального бункера включає пристрій вимірювання рівня гірничої маси в розвантажувальному бункері і пристрій формування сигналів попередження про досягнення контрольних рівнів заповнення розвантажувального бункера. Блок управління і контролю рівня заповнення розвантажувального бункера як пристрій вимірювання рівня гірничої маси в розвантажувальному бункері містить пристрій безконтактного зчитування рівня гірничої маси в розвантажувальному бункері, наприклад ультразвуковий датчик рівня. Блок визначення завантаження підйомної установки виконано з можливістю контролю ваги гірничої маси в посудині, що рухається на підйом, і розрахунку ваги гірничої маси, що залишилася (залипла) в посудині, що рухається на спуск, з подальшим формуванням відповідних інформаційних і керуючих посилок у блок контролю та управління завантаженням гірничої маси в бункер дозатора. Датчики контролю стану стволового обладнання на горизонті включають датчики точного зупину, стану стволових дверей, кулаків, ляд, майданчиків, що гойдаються, гальмівних і врівноважуючих канатів. Графічний інтерфейс для відображення на моніторі інформації про параметри системи включає програмний засіб для екранної форми основної мнемосхеми технологічного процесу ШПУ та екранних форм детального стану окремих цільових параметрів системи. Як окремі цільові параметри системи відображають наступну інформацію: режим роботи системи, швидкість підйомної установки, положення посудин у стволі шахти, ваги гірничої маси, що завантажена в посудину, стан дозатора, стан розвантажувального бункера, стан ланцюга гальма запобіжного, струм і напругу двигунів і генераторів підйомної установки, інформацію про продуктивність ШПУ за будь-який проміжок часу. Суть технічного рішення, що заявляється, полягає в розширенні функціональних можливостей системи, які дозволяють контролювати і керувати параметрами системи від моменту дозування гірничої маси в посудину підйомної машини на горизонті, де розташований дозатор, його підйому на горизонт, де розташований приймальний майданчик, до моменту розвантаження гірничої маси з посудини в розвантажувальний бункер з подальшою евакуацією гірничої маси за межі ШПУ. Реалізація нових функціональних можливостей забезпечується введенням в систему додаткових блоків - блока контролю та управління завантаженням гірничої маси в бункер дозатора, блока управління та контролю рівня заповнення розвантажувального бункера, блока шахтної стволової сигналізації та зв'язку, що включає інтерфейс з функціями забезпечення обміну інформаційними посилками з усіма блоками і пристроями системи, пристрій голосового двостороннього гучномовного зв'язку та пристрої сигналізації горизонту, до яких підключені датчики контролю стану стволового обладнання на горизонті. Це дозволяє контролювати, 2 UA 101731 C2 5 10 15 20 25 30 35 40 45 50 55 60 формувати керуючі сигнали, оперативно реагувати на ситуації, що виникають, відображати всю необхідну інформацію про стан технологічного обладнання і всього технологічного циклу роботи ШПУ. Блок шахтної стволової сигналізації та зв'язку, що включає інтерфейс з функціями забезпечення обміну інформаційними посилками з усіма блоками та пристроями системи, пристрої голосового двостороннього гучномовного зв'язку та пристрої сигналізації горизонту, до яких підключені датчики контролю стану стволового обладнання на горизонті, забезпечує надійний обмін інформацією між усіма блоками, які входять до складу системи, в тому числі між пристроями вимірювання, контролю та управління, розташованими на віддалених горизонтах шахти, і центральним блоком управління. Виконання блока шахтної стволової сигналізації та зв'язку розгалуженим по горизонтах для забезпечення обміну інформаційними посилками з усіма блоками і пристроями системи, в тому числі і пристроями сигналізації горизонту, є новою, порівняно з аналогами, і ключовою системною функціональною можливістю, завдяки якій можливе необмежене нарощування нових локальних функціональних можливостей системи контролю і управління шахтною підйомною установкою. Датчики контролю стану стволового обладнання на горизонті формують інформаційні посилки про стан стволового обладнання - пристроїв контролю точного зупину, стану стволових дверей, кулаків, ляд, майданчиків, що гойдаються, гальмівних і врівноважуючих канатів. Поточна інформація передається через пристрій сигналізації горизонту та інтерфейс блока шахтної стволової сигналізації та зв'язку до центрального процесорного блока. У випадку нештатного (аварійного) стану стволового обладнання, на підставі одержаної інформації система забезпечує автоматичне блокування відповідного режиму роботи підйомної установки і ініціює зміну режиму, що виключає аварію. Блок контролю та управління завантаженням гірничої маси в бункер дозатора, що включає пристрій вимірювання ваги гірничої маси в бункері дозатора і пристрій управління дозатором, забезпечує контроль і керування дозуванням гірничої маси в скіп на горизонті. При цьому функціональна можливість системи формування дози в посудину з урахуванням інформації про наявність гірничої маси, що залишилася після розвантаження (залипла) в посудині, забезпечує підвищення надійності, достовірності та безпеки роботи ШПУ, що по кінцевому рахунку підвищує продуктивність ШПУ. Блок управління і контролю рівня заповнення розвантажувального бункера, що включає пристрій вимірювання рівня гірничої маси в розвантажувальному бункері і пристрій формування сигналів попередження при контрольних рівнях заповнення розвантажувального бункера забезпечує підвищення рівня безпеки та ефективності ШПУ, оскільки при досягненні допустимої межі верхнього рівня заповнення розвантажувального бункера для запобігання пересипу формується попереджувальний сигнал, який можна використовувати для організації більш інтенсивного розвантаження або, в разі нештатних ситуацій заборонити підйом гірничої маси, тобто зупинити ШПУ, а при досягненні допустимої межі нижнього рівня заповнення, для запобігання руйнування розвантажувального вузла бункера формується попереджувальний сигнал для тимчасового призупинення процесу розвантаження до моменту, поки межа нижнього рівня дозволить продовжити розвантаження без загрози руйнування розвантажувального вузла. Функціонально блок управління і контролю стану рівня заповнення розвантажувального бункера дозволяє організувати безупинну роботу підйомної установки, оскільки інформація про стан розвантажувального бункера дозволяє своєчасно прийняти рішення про евакуацію гірничої маси з розвантажувального бункера і запобігти частим зупинкам підйомної машини. Це не тільки підвищує ресурс її експлуатації і параметри надійності, але й істотно впливає на продуктивність ШПУ. Таким чином, істотні ознаки винаходу, що заявляється, забезпечують нові, у порівнянні з найближчим аналогом, функціональні можливості системи, які дозволяють радикально підвищити надійність і безпеку роботи системи за рахунок запобігання перевантаження скіпа і непередбачених зупинок підйомної машини у разі переповненого розвантажувального бункера, а також за рахунок контролю стану стволового обладнання на всіх горизонтах. Крім того, система дозволяє отримувати і відображати на мнемосхемі точну інформацію про поточні робочі параметри системи, підняту вагу гірничої маси, продуктивність підйомної установки. Пристрій безконтактного зчитування рівня гірничої маси в розвантажувальному бункері, наприклад ультразвуковий датчик рівня, дозволяє отримати інформацію про стан розвантажувального бункера в оптимальній для роботи формі. Виконання блока визначення завантаження підйомної установки з можливістю контролю ваги гірничої маси в посудині, що рухається на підйом, і розрахунку ваги гірничої маси, що 3 UA 101731 C2 5 10 15 20 25 30 35 40 45 50 55 залишилася (залипла) в посудині, що рухається на спуск, з подальшим формуванням відповідних інформаційних і керуючих посилок у блок контролю та управління завантаженням гірничої маси в бункер дозатора, дозволяє корегувати завантаження гірничої маси в посудину з метою підвищення безпеки та продуктивності підйомної установки. Графічний інтерфейс користувача у заявленому технічному рішенні визначається як будьякий комп'ютерний інтерактивний інтерфейс, який замінює символи графічними зображеннями, і яким керують за допомогою координатно-вказівного пристрою, наприклад "миші". Є можливість відображення детального стану окремих цільових параметрів системи. Цільові параметри і форма їх подання на мнемосхемі забезпечують відображення всієї необхідної для контролю і прийняття рішень інформації компактно, в зручному для користувачів форматі. Таким чином, технічне рішення, що заявляється, системи контролю та управління шахтною підйомною установкою дозволяє вирішити поставлену задачу підвищення надійності, інформативності та безпечності роботи ШПУ за рахунок розширення її функціональних можливостей. При цьому обсяг функцій за участю людини зводяться до загального контролю за ситуацією і прийняття тільки передбачених екстрених заходів, що дозволяє обмежити вплив людського чинника в штатному режимі роботи. Це підтверджується прикладом конкретного виконання системи. На фіг. 1 представлена блок-схема системи контролю та управління шахтною підйомною установкою; На фіг. 2 - приклад екранної форми основної мнемосхеми технологічного процесу ШПУ; На фіг. 3 - екранна форма мнемосхеми графіка роботи скіпового підйому; Система контролю і управління шахтною підйомною установкою, що включає центральний процесорний блок 1 з функціями забезпечення завдання, управління, індикації параметрів та реєстрації збереження і відтворення архівної інформації про роботу системи, датчики 2 положення посудин, блок 3 визначення положення посудин і напрямку руху, блок 4 релейнокомутаційний, пристрій 5 управління реверсом, пристрій 6 управління попереднім гальмом і пристрій 7 контролю прослизання канатів, блок 8 контролю та управління електроприводом шахтної підйомної установки з датчиками 9, 10 вимірювання струму і напруги, блок 11 визначення завантаження підйомної установки, блок 12 самодіагностики, графічний інтерфейс 13 для відображення на моніторі інформації про параметри системи у формі мнемосхеми, блок 14 контролю та управління завантаженням гірничої маси в бункер дозатора, блок 15 управління і контролю рівня заповнення розвантажувального бункера і блок 16 шахтної стволової сигналізації та зв'язку, що включає інтерфейс 17 з функціями забезпечення обміну інформаційними посилками з усіма блоками та пристроями системи, пристрої 18 сигналізації горизонту та пристрої 19 голосового двостороннього гучномовного зв'язку. До пристроїв 18 сигналізації горизонту підключені датчики контролю стану стволового обладнання на горизонті: датчики 20 контролю точного зупину, датчики 21 стану стволових дверей, датчики 22, 23, 24, 25 кулаків, ляд, майданчиків, що гойдаються, гальмівних і врівноважуючих канатів (відповідно). Блок 14 контролю та управління завантаженням гірничої маси в бункер дозатора включає пристрій 26 вимірювання ваги гірничої маси в бункері дозатора і пристрій 27 управління дозатором, а блок 15 управління і контролю рівня заповнення розвантажувального бункера включає пристрій 28 вимірювання рівня гірничої маси в розвантажувальному бункері і пристрій 29 формування сигналів попередження про досягнення контрольних рівнів заповнення розвантажувального бункера. Блок 15 управління і контролю рівня заповнення розвантажувального бункера як пристрій 28 вимірювання рівня гірничої маси в розвантажувальному бункері містить ультразвуковий датчик рівня. Блок 11 визначення завантаження підйомної установки виконано з можливістю контролю ваги гірничої маси в посудині, що рухається на підйом, і розрахунку ваги гірничої маси, що залишилася (залипла) в посудині, що рухається на спуск, з можливістю формування, при залипанні, інформаційних посилок у блок 14 контролю та управління завантаженням гірничої маси в бункер дозатора з метою корегування ваги гірничої маси, що завантажується в посудину. Графічний інтерфейс 13 для відображення на моніторі інформації про параметри системи виконано як будь-який комп'ютерний інтерактивний інтерфейс, який замінює символи графічними зображеннями, і яким керують за допомогою координатно-вказівного пристрою, наприклад "миші". У системі використовують стандартні інтерфейси та протоколи обміну інформацією. Наведені 2 екранні форми мнемосхеми графічного інтерфейсу. 4 UA 101731 C2 5 10 15 20 25 30 35 40 45 50 55 Блок самодіагностики 12 виконаний у формі контролера з тестовими відгуками на стан контрольних сигналів. Блок реєстрації, зберігання та відтворення архівної інформації про роботу системи виконаний у формі зовнішнього накопичувача захищеної оперативної пам'яті. Система контролю і управління шахтної підйомної установкою працює наступним чином. При включенні системи підключається блок 12 самодіагностики і перевіряються тестові відгуки на контрольні сигнали. Всі необхідні технологічні параметри завантажуються в оперативну пам'ять центрального процесорного блока 1, де виділена область поточних параметрів захисної та робочої тахограми, область технологічних параметрів підйомної установки в робочому режимі і в режимах максимального і мінімального допуску змін параметрів (напруга і струм двигуна, тестові відгуки на певні сигнали). Функціонування кожного з блоків забезпечується локальним мікроконтролерним модулем з відповідним програмним забезпеченням і програмним забезпеченням верхнього рівня центрального процесорного блока 1. Структурно система виконана з розподіленим управлінням, що робить її відкритою для підключення додаткових функціональних модулівконтролерів, датчиків. На фіг. 1 показано підключення додаткових контролерів з датчиками. Наприклад, це може бути контролер з датчиками для вимірювання і контролю температури вкладишів підшипників підйомної установки. Для обміну інформаційними посилками між блоками системи використовується цифровий двопровідний інтерфейс 17. На кожному з обслуговуваних горизонтів встановлюється блок живлення (не показаний) і пристрій 18 сигналізації горизонту з датчиками 20-25 та пристрій 19 голосового двостороннього гучномовного зв'язку. Датчики є джерелами формування первинних сигналів про стан стволового обладнання. Подальше формування інформаційних посилок здійснюється контролером пристрою 18, звідки вони надходять за допомогою блока 17 в блок 1 і блок 4 для відпрацювання відповідних керуючих сигналів і блокувань як на горизонті, так і в схемі управління підйомною установкою. Блок 3 визначення положення посудин і напрямку руху отримує первинну інформацію від датчиків 2 положення посудин, за які використовуються поворотні шифратори, вал яких зв'язаний з валом підйомної установки. Програма завдання руху обчислюється в блоці 1 відповідно до параметрів тахограми і як керуючі сигнали надходить у блок 8. В блоці 1 обробляється інформація від блока 3, обчислюється реальна швидкість посудин і зрівнюється зі швидкістю, що задається, відповідно до параметрів тахограми. В разі неузгодженості програма завдання руху корегується. Від датчиків 9 і 10 вимірювання струму і напруги надходить інформація, що дозволяє сформувати оптимальну діаграму розгону двигуна підйомної установки і керувати параметрами швидкості і прискорення. Блок 14 контролю та управління завантаженням гірничої маси в бункер дозатора включає пристрій 27 управління дозатором у формі контролера дозування, куди надходить інформація від блока 11 і блока 1 про вагу залипання, з урахуванням якої корегується заздалегідь введений рівень завантаження бункера дозатора. Рівень завантаження бункера дозатора визначається характеристиками підйомної установки. Завантаження бункера дозатора припиниться коли вага гірничої маси, яка завантажена в бункер дозатора, досягне рівня завантаження бункера дозатора. Інформація про вагу гірничої маси надходить в пристрій 27 управління дозатором від пристрою 26 вимірювання ваги гірничої маси в бункері дозатора (тензодатчика). Таким чином завантаження гірничої маси в посудину здійснюється з урахуванням інформації від блока 11 визначення завантаження підйомної установки, що виконаний з можливістю контролю ваги гірничої маси в посудині, що рухається на підйом, і розрахунку ваги гірничої маси, що залишилася (залипла) в посудині, що рухається на спуск, і з подальшим формуванням, при залипанні, інформаційних посилок у блок 14 контролю та управління завантаженням гірничої маси в бункер дозатора з метою корегування ваги гірничої маси, що завантажується в бункер дозатора. Для розрахунку ваги гірничої маси, що залишилася (залипла) в посудині, що рухається на спуск, необхідно передчасно зафіксувати еталонну модель процесу підйому завантаженої посудини при гарантовано розвантаженій посудині, що рухається на спуск. Для цього вимірюють струм на клемах двигуна І1, І2, … Іn, при відповідному навантаженні на підйом посудини вагою Р1, Р2,…Рn, (при цьому виміри проводять двічі - спершу одна з посудин завантажена, а інша гарантовано розвантажена, а потім навпаки). Далі встановлюють 5 UA 101731 C2 5 10 15 20 25 кореляційні залежності між струмом та вагою (для обох посудин), вираховують коефіцієнти кореляції. В робочому режимі з блока 14 контролю та управління завантаженням гірничої маси в бункер дозатора в блок 11 визначення завантаження підйомної установки надходить інформація про вагу гірничої маси, яку завантажили в посудину для подальшого підйому і розвантаження в розвантажувальний бункер. Під час підйому вимірюють струм на клемах двигуна і визначають (відповідно з кореляційною залежністю) відповідність виміряного значення струму реальному значенню ваги гірничої маси, що піднімається. В разі невідповідності вираховують вагу гірничої маси, що залишилася (залипла) в посудині, що рухається на спуск, з подальшим формуванням, інформаційних посилок у блок 14 контролю та управління завантаженням гірничої маси в бункер дозатора з метою корегування ваги гірничої маси, що завантажується в бункер дозатора, для попередження перевантаження посудини. Така реалізація процесу дозування підвищує точність, інформативність і безпеку роботи системи, що заявляється. Блок 15 управління і контролю рівня заповнення розвантажувального бункера включає пристрій 28 вимірювання рівня гірничої маси в розвантажувальному бункері (безконтактний датчик рівня) і пристрій 29 формування сигналів попередження про досягнення контрольних рівнів заповнення розвантажувального бункера (контролер рівня). Така реалізація блока 15 управління і контролю рівня заповнення розвантажувального бункера дозволяє підвищити безпеку, надійність і продуктивність системи, що заявляється. Графічний інтерфейс 13 відображає інформацію у формі мнемосхем - основної мнемосхеми і мнемосхем детальної інформації про стан цільових груп параметрів роботи ШПУ. Компонування мнемосхеми виконане таким чином, щоб усі необхідні індикатори та мнемознаки, що відображають інформацію про сигнали і параметри роботи системи, перебували б у межах поля зору оператора. ФОРМУЛА ВИНАХОДУ 30 35 40 45 50 55 1. Система контролю і керування шахтною підйомною установкою, що включає центральний процесорний блок з функціями забезпечення завдання, керування, індикації параметрів та реєстрації збереження і відтворення архівної інформації про роботу системи, датчики положення посудин, блок визначення положення посудин і напрямку руху, блок контролю і керування електроприводом шахтної підйомної установки з датчиками вимірювання струму і напруги, блок визначення завантаження підйомної установки, блок самодіагностики, графічний інтерфейс для відображення на моніторі інформації про параметри системи у формі мнемосхеми, яка відрізняється тим, що додатково містить блок контролю і керування завантаженням гірничої маси в бункер дозатора, блок керування і контролю рівня заповнення розвантажувального бункера, блок шахтної стволової сигналізації та зв'язку, що включає інтерфейс з функціями забезпечення обміну інформаційними посилками з усіма блоками та пристроями системи, пристрої голосового двостороннього гучномовного зв'язку та пристрої сигналізації горизонту, до яких підключені датчики контролю стану стволового обладнання на горизонті, при цьому блок контролю і керування завантаженням гірничої маси в бункер дозатора містить пристрій вимірювання ваги гірничої маси в бункері дозатора і пристрій керування дозатором, а блок керування і контролю рівня заповнення розвантажувального бункера містить пристрій вимірювання рівня гірничої маси в розвантажувальному бункері і пристрій формування сигналів попередження про досягнення контрольних рівнів заповнення розвантажувального бункера. 2. Система за п. 1, яка відрізняється тим, що блок керування і контролю рівня заповнення розвантажувального бункера як пристрій вимірювання рівня гірничої маси в розвантажувальному бункері містить пристрій безконтактного зчитування рівня гірничої маси в розвантажувальному бункері, наприклад ультразвуковий датчик рівня. 3. Система за п. 1, яка відрізняється тим, що блок визначення завантаження підйомної установки виконано з можливістю контролю ваги гірничої маси в посудині, що рухається на підйом, і розрахунку ваги гірничої маси, що залишилася в посудині, що рухається на спуск, з подальшим формуванням відповідних інформаційних і керуючих посилок у блок контролю і керування завантаженням гірничої маси в бункер дозатора. 4. Система за п. 1, яка відрізняється тим, що датчики контролю стану стволового обладнання на горизонті містять датчики точного зупину, стану стволових дверей, кулаків, ляд, майданчиків, що гойдаються, гальмівних і врівноважуючих канатів. 6 UA 101731 C2 5 10 5. Система за п. 1, яка відрізняється тим, що графічний інтерфейс для відображення на моніторі інформації про параметри системи містить програмний засіб для екранної форми основної мнемосхеми технологічного процесу Шахтної Підйомної Установки ШПУ та екранних форм детального стану окремих цільових параметрів системи. 6. Система за п. 5, яка відрізняється тим, що як окремі цільові параметри системи відображають наступну інформацію: режим роботи системи, швидкість підйомної установки, положення посудин у стволі шахти, ваги гірничої маси, що завантажена в посудину, стан дозатора, стан розвантажувального бункера, стан ланцюга гальма запобіжного, струм і напругу двигунів і генераторів підйомної установки, інформацію про продуктивність ШПУ за будь-який проміжок часу. 7 UA 101731 C2 8 UA 101731 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of monitoring and control of mine winder
Автори англійськоюSmovzh Oleksandr Leonidovych, Maksymov Yevhen Valeriiovych, Kodolov Eduard Viktorovych, Molchanov Serhii Yuriiovych
Назва патенту російськоюСистема контроля и управления шахтной подъемной установкой
Автори російськоюСмовж Александр Леонидович, Максимов Евгений Валерьевич, Кодолов Эдуард Викторович, Молчанов Сергей Юрьевич
МПК / Мітки
Мітки: установкою, контролю, підйомною, керування, система, шахтною
Код посилання
<a href="https://ua.patents.su/11-101731-sistema-kontrolyu-i-keruvannya-shakhtnoyu-pidjjomnoyu-ustanovkoyu.html" target="_blank" rel="follow" title="База патентів України">Система контролю і керування шахтною підйомною установкою</a>
Пристрій керування шахтною підйомною установкою
Номер патенту: 6106
Опубліковано: 29.12.1994
Автори: Матвієнко Микола Павлович, Літягін Володимир Федорович, Марищенко Олександр Іванович
МПК: B66B 1/00
Мітки: керування, підйомною, шахтною, установкою, пристрій
Формула / Реферат:
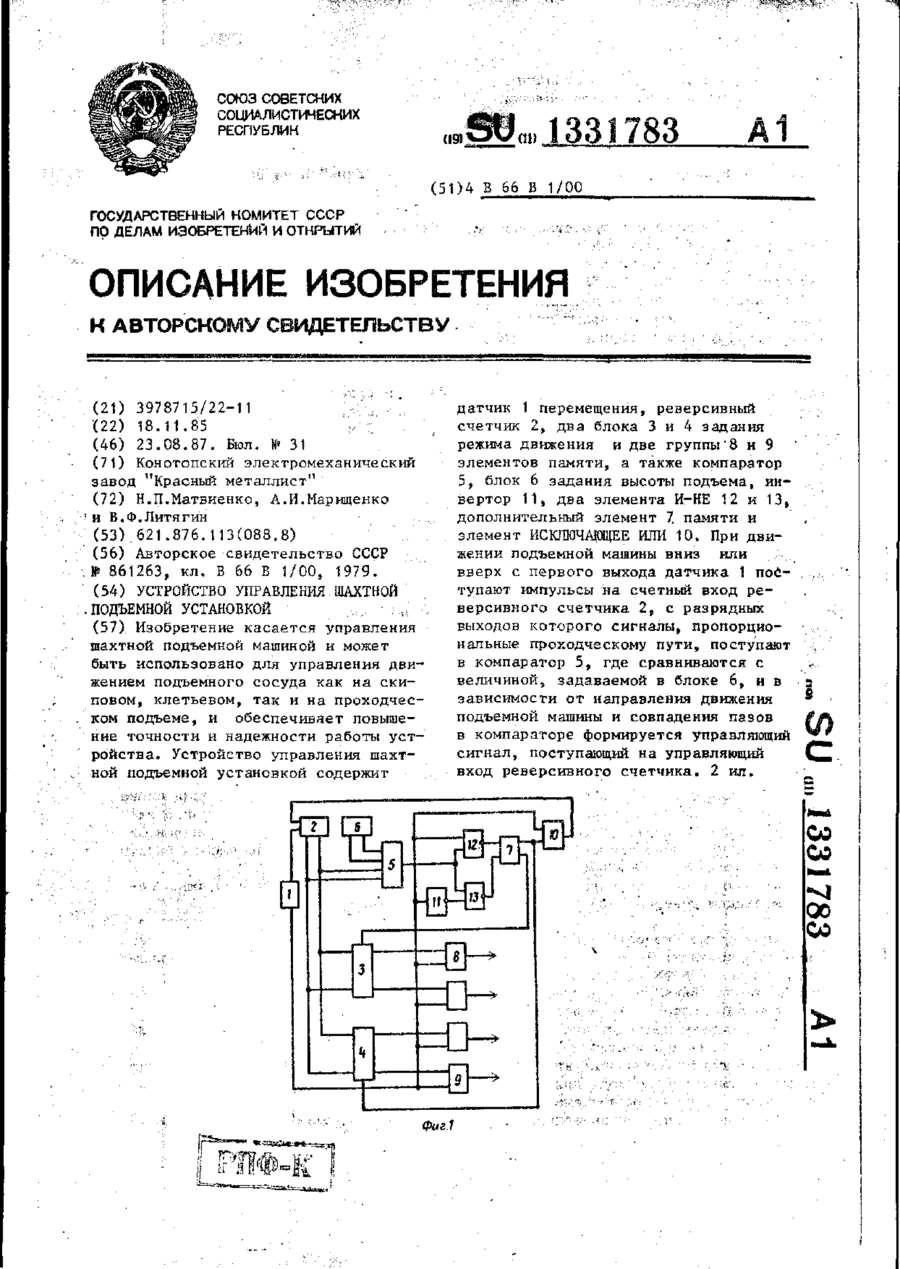
Устройство управлення шахтной подъемной установкой, содержащее датчик перемещения и направления движения, первый выход которого соединен со счетным входом реверсивного счетчика, разрядные выходы которого соединены с первыми входами первого и второго блоков задания режима движения, выходы которых соединены с входами синхронизации элементов памяти соответственно первой и второй группы, выходы которых являются выходами устройства, отличающееся...
Система керування двигуновою установкою літального апарата
Номер патенту: 61817
Опубліковано: 17.11.2003
Автори: Кулік Анатолій Степанович, Дигало Оксана Миколаївна, Лазоркін Юрій Юрійович, Цехмейстер Олена Олексіївна, Бандура Іван Миколайович
МПК: B64D 31/00
Мітки: керування, установкою, літального, двигуновою, апарата, система
Формула / Реферат:
Система керування двигуновою установкою літального апарата, що містить датчик частоти обертання ротора двигуна, електричний привід паливного агрегату, з'єднаний з паливним агрегатом, яка відрізняється тим, що в неї введені датчик тиску повітря за компресором, послідовно з'єднаний з блоком регулювань точності датчика тиску, датчик температури повітря за вентилятором, послідовно з'єднаний із блоком регулювань точності датчика температури, блок...
Комп’ютерна система контролю і керування мікрокліматом робочого місця
Номер патенту: 23908
Опубліковано: 11.06.2007
Автори: Шабатура Максим Юрійович, Шабатура Юрій Васильович
МПК: F24F 11/00
Мітки: мікрокліматом, місця, система, комп'ютерна, контролю, робочого, керування
Формула / Реферат:
Комп'ютерна система контролю і керування мікрокліматом робочого місця, що містить комп'ютер з програмами контролю та керування, які зберігаються в його пам'яті, блок керування, інтерфейс зв'язку, сенсори температури та вологості, яка відрізняється тим, що в неї введено мікроконтролерний інформаційно-вимірювальний блок, сенсор освітлення, причому сенсор освітлення зв'язаний з входом мікроконтролерного інформаційно-вимірювального блока, вихід...
Система керування дизель-генераторною установкою тепловоза
Номер патенту: 34136
Опубліковано: 25.07.2008
Автори: Баранніков Олександр Олександрович, Дорошко Василь Іванович, Гатченко Вікторія Олександрівна, Кривошея Юрій Володимирович
МПК: F02D 1/08
Мітки: тепловоза, система, керування, установкою, дизель-генераторною
Формула / Реферат:
1. Система керування дизель-генераторною установкою тепловоза, що містить послідовно з'єднані пульт машиніста, електричний реверсивний сервопривод і всережимний регулятор обертів з кулачком, що задає оберти, яка відрізняється тим, що кулачок всережимного регулятора обертів виконаний безперервним, а пульт машиніста виконаний з можливістю безпосереднього керування напрямком обертання сервопривода.2. Система керування за п. 1, яка...
Система керування дизель-генераторною установкою тепловоза
Номер патенту: 50972
Опубліковано: 25.06.2010
Автори: Дорошко Василь Іванович, Кривошея Юрій Володимирович, Гатченко Вікторія Олександрівна
Мітки: керування, тепловоза, дизель-генераторною, система, установкою
Формула / Реферат:
1. Система керування дизель-генераторною установкою тепловоза, що містить пульт машиніста, електричний реверсивний сервопривід, що з'єднаний з пультом машиніста з можливістю безпосереднього керування напрямком обертання сервоприводу, і всережимний регулятор обертів дизеля з безперервним задавальним кулачком, що закріплений на валу сервоприводу, яка відрізняється тим, що містить блок дискретних резисторів, який включений в ланцюг обмотки...
Попередній патент: Засув
Наступний патент: Напій, збагачений фітохімічними речовинами цитрусових (варіанти), та спосіб його одержання
Випадковий патент: Балон тиску