Пристрій для механічного балансування надпровідникового градієнтометра в неекранованому приміщенні
Номер патенту: 103062
Опубліковано: 10.09.2013
Формула / Реферат
Пристрій для механічного балансування надпровідникового градієнтометра в неекранованому приміщенні за наявності промислових перешкод, який містить три приводи переміщення для балансування градієнтометра по 3-х ортогональних, а саме: поздовжній та двох поперечних компонентах магнітного поля, для здійснення роздільного пересування вздовж осі циліндричного корпусу аксіального дротового градієнтометра 2-го порядку трьох короткозамкнених надпровідних трім-кілець, а саме: одного кільця по повздовжній компоненті та двох кілець по поперечних компонентах, який містить приймальний виток, два середніх і один верхній компенсаційні витки, які розміщені, відповідно, на його нижньому кінці, посередині корпусу, та верхньому кінці на відстані, рівній базі градієнтометра, який відрізняється тим, що трім-кільце по поздовжній компоненті виготовлено із надпровідного дроту, діаметр якого не перевищує діаметра дроту, з якого виготовлено градієнтометр, трім-кільця пo поздовжній та поперечних компонентах виготовлені з різних надпровідних матеріалів, одним з яких є ніобій, трім-кільця орієнтовані так, щоб їх осі були взаємно перпендикулярні, не менш ніж одне трім-кільце виконано іншої форми, відмінної від круглої, приводи переміщення виконані здатними пересувати кожне трім-кільце на відстань, не більшу бази градієнтометра, не менш ніж одне трім-кільце розміщене зовні градієнтометра, одним з яких є трім-кільце по поздовжній компоненті поля, трім-кільце по поздовжній компоненті виконано з можливістю переміщення між приймальним і середніми витками, трім-кільця по поперечних компонентах виконані з можливістю переміщення поблизу верхнього витка на відстань, не більшу половини бази, не менш ніж один привід переміщення виконаний у вигляді електромеханічного пристрою.
Текст
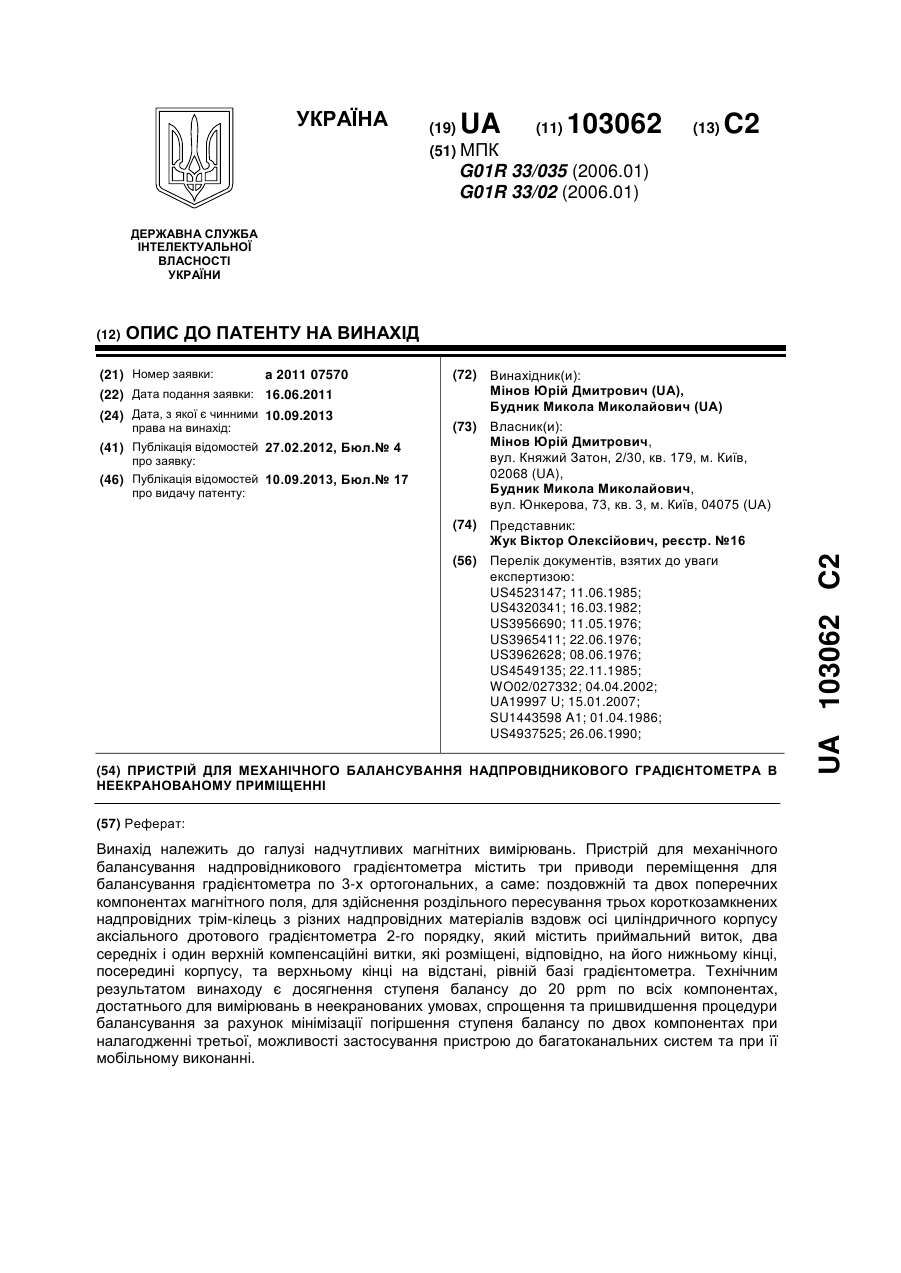
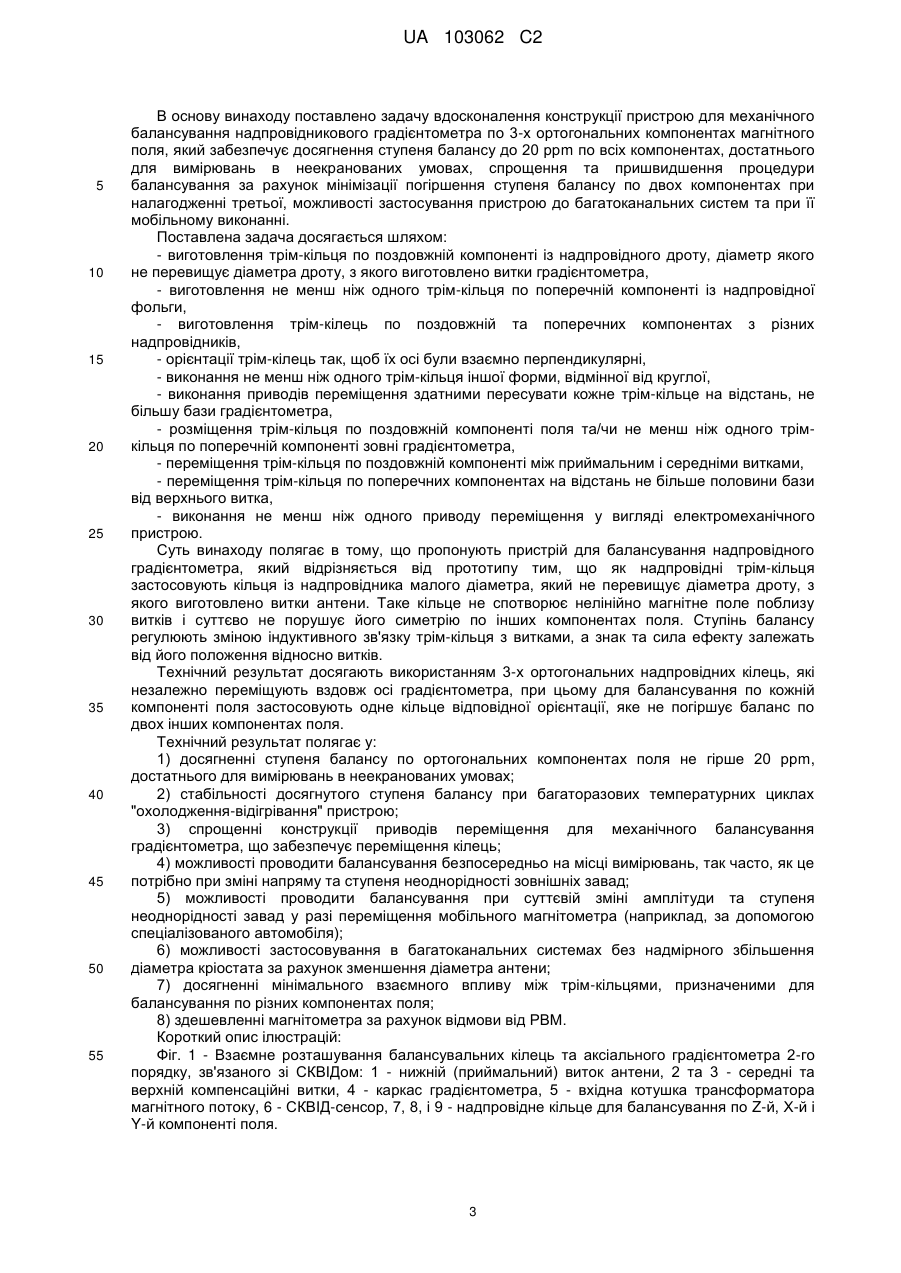
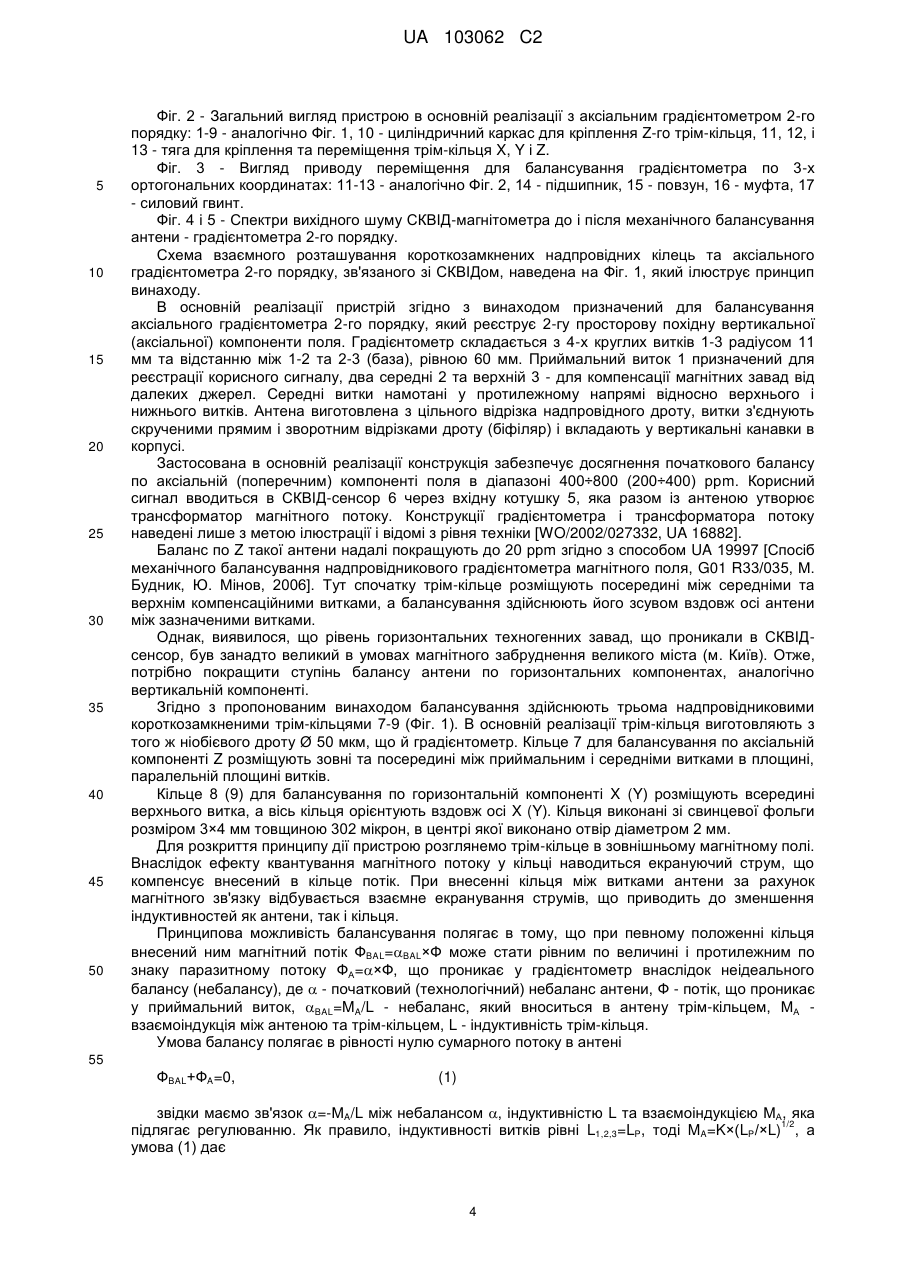
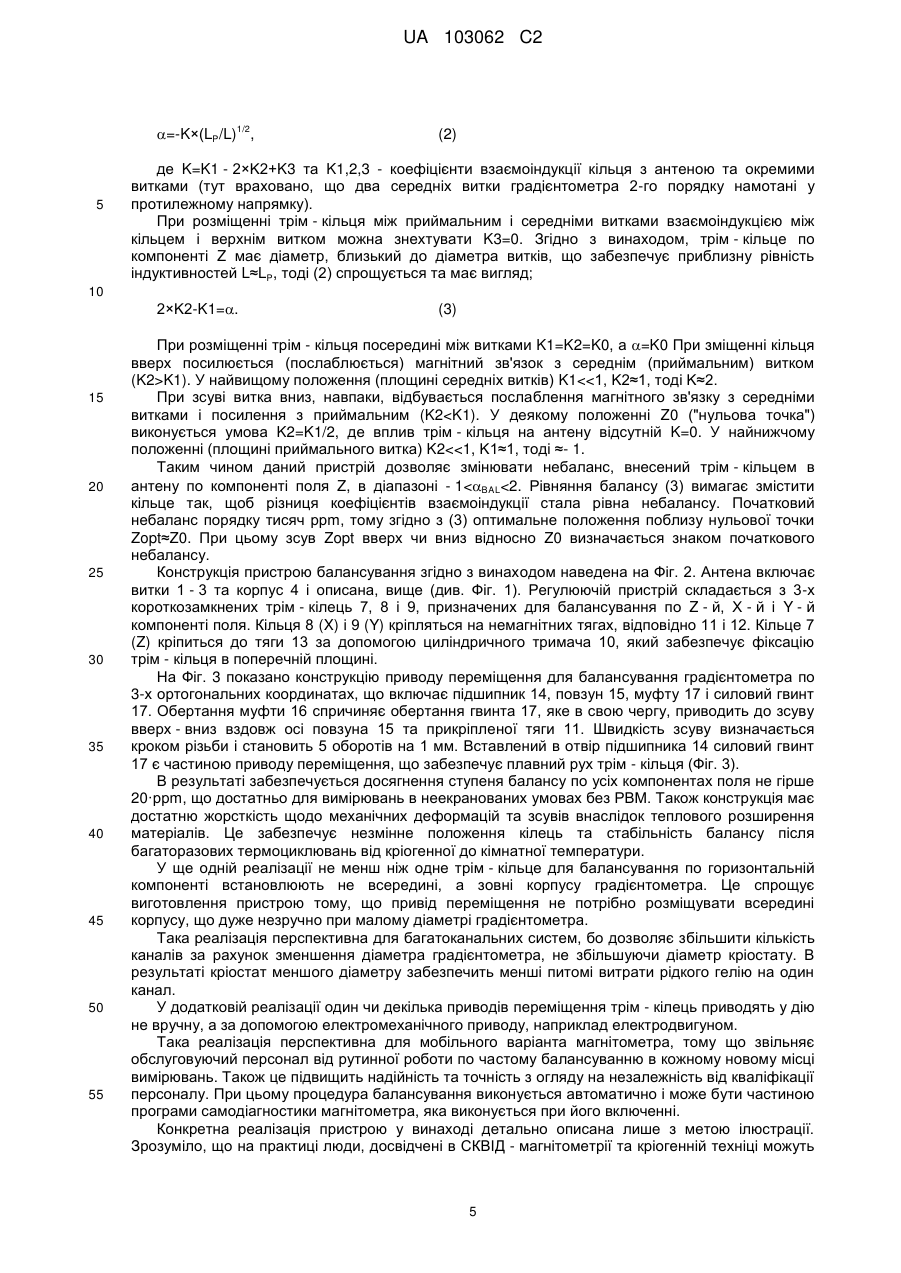
Реферат: Винахід належить до галузі надчутливих магнітних вимірювань. Пристрій для механічного балансування надпровідникового градієнтометра містить три приводи переміщення для балансування градієнтометра по 3-х ортогональних, а саме: поздовжній та двох поперечних компонентах магнітного поля, для здійснення роздільного пересування трьох короткозамкнених надпровідних трім-кілець з різних надпровідних матеріалів вздовж осі циліндричного корпусу аксіального дротового градієнтометра 2-го порядку, який містить приймальний виток, два середніх і один верхній компенсаційні витки, які розміщені, відповідно, на його нижньому кінці, посередині корпусу, та верхньому кінці на відстані, рівній базі градієнтометра. Технічним результатом винаходу є досягнення ступеня балансу до 20 ррm по всіх компонентах, достатнього для вимірювань в неекранованих умовах, спрощення та пришвидшення процедури балансування за рахунок мінімізації погіршення ступеня балансу по двох компонентах при налагодженні третьої, можливості застосування пристрою до багатоканальних систем та при її мобільному виконанні. UA 103062 C2 (12) UA 103062 C2 UA 103062 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до галузі надчутливих магнітних вимірювань і стосується балансування вхідних антен СКВІД-(Надпровідниковий Квантовий Інтерференційний Детектор)-магнітометрів. При реєстрації надслабких магнітних сигналів без послаблення індустріальних завад, вони у тисячі разів більші за корисний сигнал. Для покращення відношення сигнал/шум (ВСШ) на вході магнітометра застосовують спеціальні антени, так звані надпровідні градієнтометри. Для близьких джерел R≈B (база) послаблення корисного сигналу на вході градієнтометра незначне, (3+M) а для далеких сигнал пропорційний 1/R дe M - порядок градієнтометра. Однак сильне послаблення має місце лише при високому ступені балансу, який залежить від конструкції градієнтометра та способу його балансування. Витки градієнтометра відрізняються по площі, формі і паралельності, тому початковий -6 баланс дротових градієнтометрів приблизно рівний 2000÷4000 ppm (part per million=10 ), що недостатньо для послаблення перешкод, породжених потужними джерелами. З іншого боку, надчутливі магнітні вимірювання в неекранованих умовах потребують ступеня балансу не гірше декількох десятків ррm. Для дротових градієнтометрів відомі два шляхи: a) вдосконалення конструкції та технології виготовлення антен; b) вдосконалення засобів механічного балансування антен. По напряму а) протягом останнього 10-річчя відомо, наприклад, конструкції згідно з WO 2002/027332 та патенту UA 18882 (2006). У WO 2002/0227332 запропоновано аксіальні градієнтометри 1÷3-го порядку з корпусом, виготовленим зі скла PYREX, коефіцієнт теплового розширення якого близький до ніобію (матеріалу дроту), на корпусі виточують спіральні та вертикальні канавки, у які з натягом намотують та приклеюють ціаноакриловим клеєм витки дроту, а у вертикальні канавки намотують два скручених дроти (біфіляр). В результаті отримують ступінь балансу, рівний 400÷800 (2000) ррm для вертикальної Z (горизонтальних X та Y) компонент поля. Далі баланс покращують за допомогою електронної системи послаблення шумів (ENSS) на основі референтного векторного магнітометра (РВМ). Проте, лише ENSS без механічного балансу недостатньо для надійної роботи СКВІДмагнітометра без МЕК, наприклад, в медичній клініці. Тому відомо застосування балансувальних (трімінгових) елементів (диски, пластинки та ін.) з надпровідників (напрям b). Їх дія ґрунтується на виштовхуванні магнітного поля з надпровідника, який є ідеальним діамагнетиком. Тому поблизу трім-елемента магнітне поле спотворюється, отже в площині витків антени також змінюється його напрям і амплітуда. В результаті зсуву орієнтованих ортогонально трім-елементів можна вирівняти ефективні площі витків, що дозволяє досягти високого ступеня балансу. Відомі такі пристрої для механічного балансування: 1. US 3,976,938, G01R 33/02, Superconducting magnetic sensor with improved balancing system, W. Hesterman, Supercond. Technology, 1976. 2. US 4,320,341, G01R 33/02, Method and apparatus for balancing the magnetic field detecting loops of a cryogenic gradiometer using trimming coils and superconducting disks, C. Lutes, Sperry Corporation, 1982. 3. US 3,956,690, G05F 7/00, Trimmed superconductive magnetic pickup coil circuits, L. Rorden, Develco Inc., 1976. 4. US 3,965,411, G01R 33/02, Gradient wound trim coil for trimming a primary pickup coil, V. Hesterman, Develco Inc., 1976. 5. US 3,962,628, G01R 33/02, Adjustable magnetic gradiometer, С Rein, US Secretary of the Navy, 1976. 6. US 4,549,135, G01R 33/035, Magnetic field gradiometer with trimming element, A. Vaidya, EMI Limited, 1985. 7. UA 16882. G01 R33/035, Надпровідниковий градієнтометр магнітного поля, Ю. Мінов, М. Будник, 2006. 8. Fine balancing second derivative gradiometer, US 4,523,147, G01R 33/02, S. D'Angelo et al., Consiglio Nazionale Delle Recerche, 1985. Відомі попередні пристрої для балансування по 3-х компонентах поля на основі ортогональних надпровідних трімінгових дисків [US 3,976,938 і US 4,320,341]. Суттєвим недоліком є сильна залежність ступеня балансу від напряму і однорідності магнітної перешкоди, що пояснюється взаємним впливом трім-елементів. В результаті, після балансування антени в заводських умовах в однорідному магнітному полі та переміщення її в місце вимірювань з неоднорідними перешкодами ступінь балансу може погіршитись в 100 і більше разів. 1 UA 103062 C2 5 10 15 20 25 30 35 40 45 50 55 60 Крім того, в US 3,976,938 спочатку проводять грубе балансування, потім градієнтометр виймають з кріостату, диски механічно кріплять та знову занурюють у рідкий гелій для точного балансування. Але внаслідок термоциклювання змінюються розміри деталей антени, тому цей спосіб не може забезпечити достатній ступінь балансу. Також відомо пристрої, які ґрунтуються на інших підходах. Так, в US 3,962,628 пристрій включає кулачковий механізм, у якому за допомогою обертання кулачків деформують витки градієнтометра, внаслідок чого змінюють їх ефективні площі. В патенті US 4,549,135 балансувальний елемент включає електричний нагрівач, який переводить частину надпровідника у резистивний стан. Проте, реалізація обох зазначених пристроїв досить складна і орієнтована на певні типи антен та спеціальні умови вимірювань, а тому сучасний рівень техніки не демонструє їх подальшого розвитку. Більш близький підхід [US 3,965,411 і US 3,956,690] на основі ортогональних надпровідних кілець, гальванічно включених у трансформатор магнітного потоку. Кільця виконують як градієнтометр, а зв'язок з магнітним полем регулюють зсувом надпровідного магнітного екрана. Основним недоліком зазначеного підходу є внесення в трансформатор потоку додаткових індуктивностей, що погіршує чутливість СКВІД-магнітометра до вхідного сигналу. Крім того, трім-кільця повинні бути точно виготовлені та орієнтовані, а у разі градієнтометричної конфігурації також мати власний високий ступінь балансу. В аналізі UA 16882 балансуючий елемент по осі Z виконано у вигляді надпровідного кільця, вміщеного всередині корпусу антени, та приводу переміщення вздовж осі корпусу. Кільце має індуктивний (а не гальванічний) зв'язок з компенсаційними (а не з приймальним) витком антени. Недолік - пристрій призначений для балансування лише по вертикальній компоненті поля. Пристрій-прототип згідно з US 4,523,147 включає дротовий аксіальний градієнтометр 2-го порядку з верхньою, центральною та нижньою (приймальною) котушками. Корпус складається з двох коаксіальних частин, на першій з яких закріплено центральну і нижню котушки, а на другій верхню котушку, при цьому верхня та нижня котушки мають N витків, а центральна - 2xN витків. Корпус антени має 3 вертикальні отвори, в яких розміщені балансувальні механізми по 3-х ортогональних компонентах поля, трім-елементи виконані свинцевими пластинами. Балансування полягає в переміщенні зазначених пластинок відносно котушок для вирівнювання їх ефективних площ. Відмінною рисою прототипу є мікронна зміна відстані між верхньою та центральною котушками шляхом зсуву верхньої частини корпусу відносно нижньої. Для цього слугує тяга та дві гвинтові частини, які перетворюють обертальний рух гвинта у зсув тяги. Балансування здійснюють обертанням гвинта, при цьому змінюють відстань між котушками антени шляхом зсуву вверх-вниз верхньої частини корпусу. Ступінь балансу підвищують за рахунок компенсації вертикального градієнта перешкоди. Результат підтверджено зниженням граничної частоти 1/f шуму на виході магнітометра з 10 Гц до 0,4 Гц. Проте, виконання корпусу з двох частин ускладнює конструкцію та збільшує вартість пристрою. Крім того, недоліки надпровідних пластин аналогічні дискам (див. вище US 3,976,938 та US 4,320,341). При неекранованих вимірюваннях послаблення перешкод може бути здійснено додатковим балансуванням на місці вимірювань. Основним критерієм у цьому випадку є максимальне послаблення перешкоди на виході магнітометра. Проте, таке балансування має сенс лише для стаціонарних вимірювальних систем, розташування яких відносно джерел перешкод тривалий час залишається незмінним. Також в мобільних системах використання надпровідних пластин потребує додаткового балансування в кожному новому місці вимірювань. Крім того, процедура балансування складна і багатоітераційна попри сильний взаємний вплив пластин. Новизна пропонованого винаходу полягає у: 1) поєднанні конструкції пристрою згідно з прототипом US 4,523,147 та аналогом UA 16882; 2) розширенні можливості пристрою для балансування по горизонтальних компонентах поля; 3) відмові від застосування 3-компонентного РВМ і ENSS для знешумлення сигналу; 4) можливості розміщення трім-кільця по вертикальній компоненті поля зовні градієнтометра, що дозволяє застосовувати пристрій до антен діаметром менше 1 см; 5) можливості створення багатоканальних вимірювальних систем з мінімальним взаємним впливом вимірювальних каналів; 6) зміщенні трім-кільця по вертикальній компоненті поля між середніми та приймальним витками; 7) можливості розміщення трім-кільця по горизонтальній компоненті поля зовні градієнтометра. 2 UA 103062 C2 5 10 15 20 25 30 35 40 45 50 55 В основу винаходу поставлено задачу вдосконалення конструкції пристрою для механічного балансування надпровідникового градієнтометра по 3-х ортогональних компонентах магнітного поля, який забезпечує досягнення ступеня балансу до 20 ррm по всіх компонентах, достатнього для вимірювань в неекранованих умовах, спрощення та пришвидшення процедури балансування за рахунок мінімізації погіршення ступеня балансу по двох компонентах при налагодженні третьої, можливості застосування пристрою до багатоканальних систем та при її мобільному виконанні. Поставлена задача досягається шляхом: - виготовлення трім-кільця по поздовжній компоненті із надпровідного дроту, діаметр якого не перевищує діаметра дроту, з якого виготовлено витки градієнтометра, - виготовлення не менш ніж одного трім-кільця по поперечній компоненті із надпровідної фольги, - виготовлення трім-кілець по поздовжній та поперечних компонентах з різних надпровідників, - орієнтації трім-кілець так, щоб їх осі були взаємно перпендикулярні, - виконання не менш ніж одного трім-кільця іншої форми, відмінної від круглої, - виконання приводів переміщення здатними пересувати кожне трім-кільце на відстань, не більшу бази градієнтометра, - розміщення трім-кільця по поздовжній компоненті поля та/чи не менш ніж одного трімкільця по поперечній компоненті зовні градієнтометра, - переміщення трім-кільця по поздовжній компоненті між приймальним і середніми витками, - переміщення трім-кільця по поперечних компонентах на відстань не більше половини бази від верхнього витка, - виконання не менш ніж одного приводу переміщення у вигляді електромеханічного пристрою. Суть винаходу полягає в тому, що пропонують пристрій для балансування надпровідного градієнтометра, який відрізняється від прототипу тим, що як надпровідні трім-кільця застосовують кільця із надпровідника малого діаметра, який не перевищує діаметра дроту, з якого виготовлено витки антени. Таке кільце не спотворює нелінійно магнітне поле поблизу витків і суттєво не порушує його симетрію по інших компонентах поля. Ступінь балансу регулюють зміною індуктивного зв'язку трім-кільця з витками, а знак та сила ефекту залежать від його положення відносно витків. Технічний результат досягають використанням 3-х ортогональних надпровідних кілець, які незалежно переміщують вздовж осі градієнтометра, при цьому для балансування по кожній компоненті поля застосовують одне кільце відповідної орієнтації, яке не погіршує баланс по двох інших компонентах поля. Технічний результат полягає у: 1) досягненні ступеня балансу по ортогональних компонентах поля не гірше 20 ррm, достатнього для вимірювань в неекранованих умовах; 2) стабільності досягнутого ступеня балансу при багаторазових температурних циклах "охолодження-відігрівання" пристрою; 3) спрощенні конструкції приводів переміщення для механічного балансування градієнтометра, що забезпечує переміщення кілець; 4) можливості проводити балансування безпосередньо на місці вимірювань, так часто, як це потрібно при зміні напряму та ступеня неоднорідності зовнішніх завад; 5) можливості проводити балансування при суттєвій зміні амплітуди та ступеня неоднорідності завад у разі переміщення мобільного магнітометра (наприклад, за допомогою спеціалізованого автомобіля); 6) можливості застосовування в багатоканальних системах без надмірного збільшення діаметра кріостата за рахунок зменшення діаметра антени; 7) досягненні мінімального взаємного впливу між трім-кільцями, призначеними для балансування по різних компонентах поля; 8) здешевленні магнітометра за рахунок відмови від РВМ. Короткий опис ілюстрацій: Фіг. 1 - Взаємне розташування балансувальних кілець та аксіального градієнтометра 2-го порядку, зв'язаного зі СКВІДом: 1 - нижній (приймальний) виток антени, 2 та 3 - середні та верхній компенсаційні витки, 4 - каркас градієнтометра, 5 - вхідна котушка трансформатора магнітного потоку, 6 - СКВІД-сенсор, 7, 8, і 9 - надпровідне кільце для балансування по Z-й, Х-й і Y-й компоненті поля. 3 UA 103062 C2 5 10 15 20 25 30 35 40 45 50 Фіг. 2 - Загальний вигляд пристрою в основній реалізації з аксіальним градієнтометром 2-го порядку: 1-9 - аналогічно Фіг. 1, 10 - циліндричний каркас для кріплення Z-гo трім-кільця, 11, 12, і 13 - тяга для кріплення та переміщення трім-кільця X, Y і Z. Фіг. 3 - Вигляд приводу переміщення для балансування градієнтометра по 3-х ортогональних координатах: 11-13 - аналогічно Фіг. 2, 14 - підшипник, 15 - повзун, 16 - муфта, 17 - силовий гвинт. Фіг. 4 і 5 - Спектри вихідного шуму СКВІД-магнітометра до і після механічного балансування антени - градієнтометра 2-го порядку. Схема взаємного розташування короткозамкнених надпровідних кілець та аксіального градієнтометра 2-го порядку, зв'язаного зі СКВІДом, наведена на Фіг. 1, який ілюструє принцип винаходу. В основній реалізації пристрій згідно з винаходом призначений для балансування аксіального градієнтометра 2-го порядку, який реєструє 2-гу просторову похідну вертикальної (аксіальної) компоненти поля. Градієнтометр складається з 4-х круглих витків 1-3 радіусом 11 мм та відстанню між 1-2 та 2-3 (база), рівною 60 мм. Приймальний виток 1 призначений для реєстрації корисного сигналу, два середні 2 та верхній 3 - для компенсації магнітних завад від далеких джерел. Середні витки намотані у протилежному напрямі відносно верхнього і нижнього витків. Антена виготовлена з цільного відрізка надпровідного дроту, витки з'єднують скрученими прямим і зворотним відрізками дроту (біфіляр) і вкладають у вертикальні канавки в корпусі. Застосована в основній реалізації конструкція забезпечує досягнення початкового балансу по аксіальній (поперечним) компоненті поля в діапазоні 400÷800 (200÷400) ррm. Корисний сигнал вводиться в СКВІД-сенсор 6 через вхідну котушку 5, яка разом із антеною утворює трансформатор магнітного потоку. Конструкції градієнтометра і трансформатора потоку наведені лише з метою ілюстрації і відомі з рівня техніки [WO/2002/027332, UA 16882]. Баланс по Z такої антени надалі покращують до 20 ррm згідно з способом UA 19997 [Спосіб механічного балансування надпровідникового градієнтометра магнітного поля, G01 R33/035, М. Будник, Ю. Мінов, 2006]. Тут спочатку трім-кільце розміщують посередині між середніми та верхнім компенсаційними витками, а балансування здійснюють його зсувом вздовж осі антени між зазначеними витками. Однак, виявилося, що рівень горизонтальних техногенних завад, що проникали в СКВІДсенсор, був занадто великий в умовах магнітного забруднення великого міста (м. Київ). Отже, потрібно покращити ступінь балансу антени по горизонтальних компонентах, аналогічно вертикальній компоненті. Згідно з пропонованим винаходом балансування здійснюють трьома надпровідниковими короткозамкненими трім-кільцями 7-9 (Фіг. 1). В основній реалізації трім-кільця виготовляють з того ж ніобієвого дроту Ø 50 мкм, що й градієнтометр. Кільце 7 для балансування по аксіальній компоненті Z розміщують зовні та посередині між приймальним і середніми витками в площині, паралельній площині витків. Кільце 8 (9) для балансування по горизонтальній компоненті X (Y) розміщують всередині верхнього витка, а вісь кільця орієнтують вздовж осі X (Y). Кільця виконані зі свинцевої фольги розміром 3×4 мм товщиною 302 мікрон, в центрі якої виконано отвір діаметром 2 мм. Для розкриття принципу дії пристрою розглянемо трім-кільце в зовнішньому магнітному полі. Внаслідок ефекту квантування магнітного потоку у кільці наводиться екрануючий струм, що компенсує внесений в кільце потік. При внесенні кільця між витками антени за рахунок магнітного зв'язку відбувається взаємне екранування струмів, що приводить до зменшення індуктивностей як антени, так і кільця. Принципова можливість балансування полягає в тому, що при певному положенні кільця внесений ним магнітний потік ФBAL=BAL×Ф може стати рівним по величині і протилежним по знаку паразитному потоку ФА=×Ф, що проникає у градієнтометр внаслідок неідеального балансу (небалансу), де - початковий (технологічний) небаланс антени, Ф - потік, що проникає у приймальний виток, BAL=MA/L - небаланс, який вноситься в антену трім-кільцем, МА взаємоіндукція між антеною та трім-кільцем, L - індуктивність трім-кільця. Умова балансу полягає в рівності нулю сумарного потоку в антені 55 ФBAL+ФA=0, (1) звідки маємо зв'язок =-МA/L між небалансом , індуктивністю L та взаємоіндукцією МА, яка 1/2 підлягає регулюванню. Як правило, індуктивності витків рівні L1,2,3=LP, тоді MA=K×(LP/×L) , а умова (1) дає 4 UA 103062 C2 =-K×(LP/L) , 1/2 5 (2) де K=K1 - 2×K2+K3 та K1,2,3 - коефіцієнти взаємоіндукції кільця з антеною та окремими витками (тут враховано, що два середніх витки градієнтометра 2-го порядку намотані у протилежному напрямку). При розміщенні трім - кільця між приймальним і середніми витками взаємоіндукцією між кільцем і верхнім витком можна знехтувати K3=0. Згідно з винаходом, трім - кільце по компоненті Z має діаметр, близький до діаметра витків, що забезпечує приблизну рівність індуктивностей L≈LP, тоді (2) спрощується та має вигляд; 10 2×K2-K1=. 15 20 25 30 35 40 45 50 55 (3) При розміщенні трім - кільця посередині між витками K1=K2=K0, а =K0 При зміщенні кільця вверх посилюється (послаблюється) магнітний зв'язок з середнім (приймальним) витком (K2>K1). У найвищому положення (площині середніх витків) K1
ДивитисяДодаткова інформація
Автори англійськоюMinov Yurii Dmytrovych, Budnyk Mykola Mykolaiovych
Автори російськоюМинов Юрий Дмитриевич, Будник Николай Николаевич
МПК / Мітки
МПК: G01R 33/035, G01R 33/02
Мітки: надпровідникового, балансування, неекранованому, приміщенні, градієнтометра, механічного, пристрій
Код посилання
<a href="https://ua.patents.su/11-103062-pristrijj-dlya-mekhanichnogo-balansuvannya-nadprovidnikovogo-gradiehntometra-v-neekranovanomu-primishhenni.html" target="_blank" rel="follow" title="База патентів України">Пристрій для механічного балансування надпровідникового градієнтометра в неекранованому приміщенні</a>
Спосіб механічного балансування надпровідникового градієнтометра магнітного поля

Номер патенту: 19997
Опубліковано: 15.01.2007
Автори: Будник Микола Миколайович, Мінов Юрій Дмитрович
МПК: G03G 19/00, G01R 33/035
Мітки: поля, механічного, градієнтометра, спосіб, магнітного, надпровідникового, балансування
Формула / Реферат:
Спосіб механічного балансування надпровідникового градієнтометра магнітного поля, який включає переміщення в магнітному полі балансуючого елемента, який відрізняється тим, що в ньому на початку балансування балансуючий елемент розміщують посередині між компенсаційними котушками, а балансування надпровідникового градієнтометра магнітного поля здійснюють переміщенням балансуючого елемента вздовж осі циліндричного корпусу в межах відстані між...
Універсальний пристрій для автоматичного балансування

Номер патенту: 60848
Опубліковано: 25.06.2011
Автори: Задольський Аркадій Миколайович, Резнік Руслан Юрійович
МПК: G01M 1/38
Мітки: пристрій, автоматичного, балансування, універсальний
Формула / Реферат:
Пристрій для автоматичного балансування, що містить диск з радіальними отворами, де пружини притиснуті гвинтами і з'єднані з металевими кульками, що рухаються при обертанні вала, який відрізняється тим, що балансуючі кульки кріпляться на пружинах.
Пристрій для автоматичного балансування
Номер патенту: 33621
Опубліковано: 15.02.2001
Автори: Сахно Євгеній Юрійович, Федориненко Дмитро Юрійович
МПК: B23B 19/00
Мітки: пристрій, автоматичного, балансування
Текст:
...в корпусі 3. Затиск неврівноваженої деталі відбувається в патроні 11, герметично сполученого з корпусом 3, який після заповнення рідиною виконує роль гідравлічного вузла гальмування. Корегуючі диски 1 і 2 встановлені в корпусі 3 за допомогою підшипників 12. Пристрій автоматичного балансування працює таким чином. При обертанні шпинделя 4 надається обертання корпусу 3 з неврівноваженими дисками 1 і 2 та патрону 11 з неврівноваженою...
Пристрій для автоматичного балансування
Номер патенту: 55264
Опубліковано: 10.12.2010
Автори: Ройзман Вілен Петрович, Ткачук Віталій Павлович, Драч Ілона Володимирівна, Чоловський Роман Геннадійович
МПК: G01M 1/00
Мітки: пристрій, балансування, автоматичного
Формула / Реферат:
Пристрій для автоматичного балансування гнучких роторів із змінним дисбалансом, виконаний у вигляді циліндричної камери, яка частково заповнена рідиною, який відрізняється тим, що камера розділена перегородками в радіальному напрямку, які утворюють декілька камер (посудин), при цьому камери з'єднані між собою вузьким каналом по всій внутрішній поверхні циліндра.
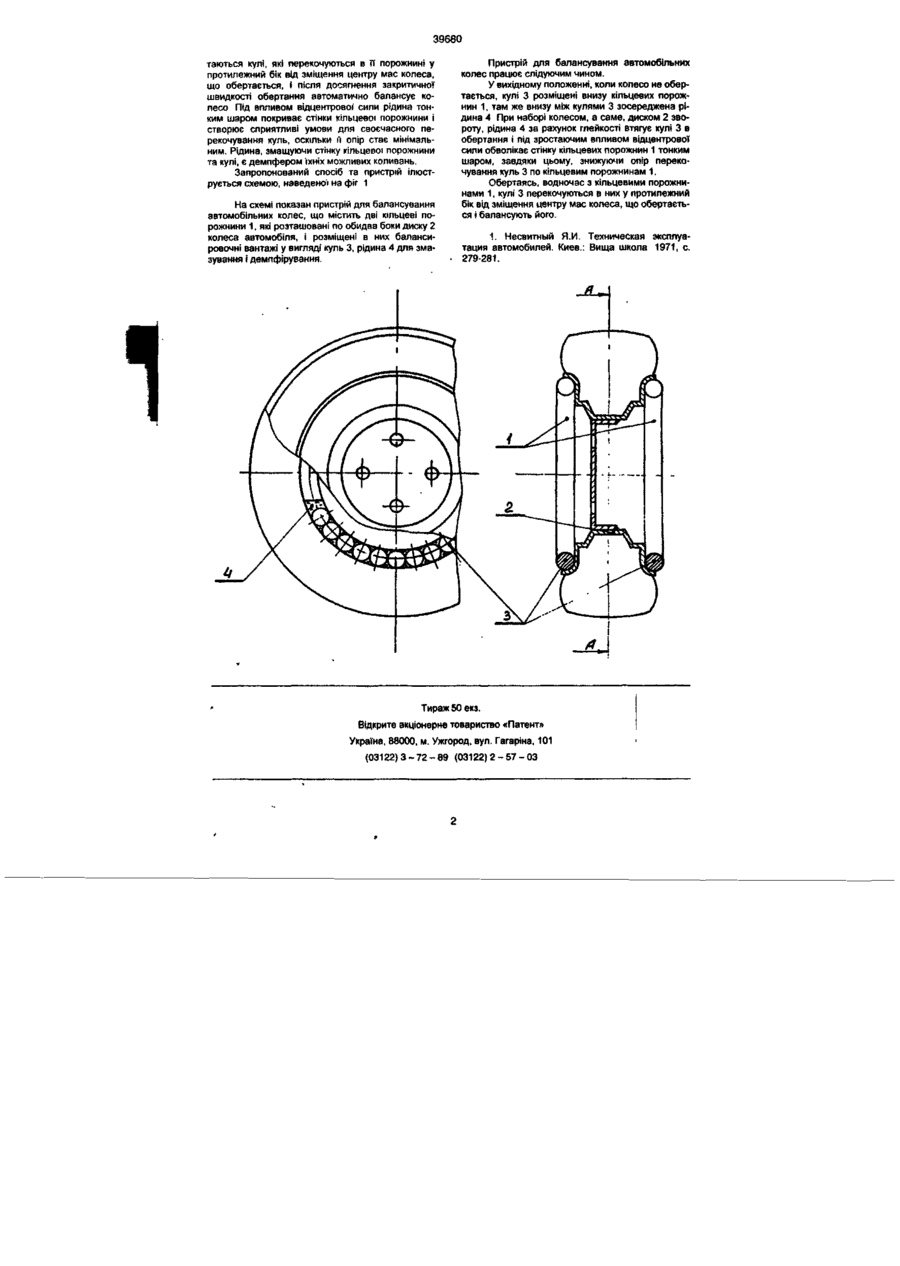
Спосіб балансування автомобільних колес та пристрій для його здійснення
Номер патенту: 39680
Опубліковано: 15.06.2001
Автори: Катчук Анатолій Миколайович, Христофоров Валерій Георгійович, Беліков Валерій Григорійович, Борщ Євген Григорович, Смоловік Олександр Олександровіч
Мітки: балансування, колес, автомобільних, здійснення, спосіб, пристрій
Формула / Реферат:
1. Спосіб балансування автомобільних коліс, що включає вплив балансувальних вантажів певної ваги у певному місці на колесо автомобіля, який відрізняється тим, що під час руху автомобіля балансувальні вантажі автоматично визначають свою вагу та місце розташування на колесі автомобіля.2. Пристрій для балансування автомобільних коліс, що містить балансувальні вантажі, скоби кріплення їх до диска колеса автомобіля, який відрізняється тим,...
Попередній патент: Вібраційна установка для випробувань на втому
Наступний патент: Пристрій для транспортування та зберігання ливарної труби для перенесення рідкого металу
Випадковий патент: Спосіб лікування псоріазу