Спосіб механічного балансування надпровідникового градієнтометра магнітного поля
Номер патенту: 19997
Опубліковано: 15.01.2007


Формула / Реферат
Спосіб механічного балансування надпровідникового градієнтометра магнітного поля, який включає переміщення в магнітному полі балансуючого елемента, який відрізняється тим, що в ньому на початку балансування балансуючий елемент розміщують посередині між компенсаційними котушками, а балансування надпровідникового градієнтометра магнітного поля здійснюють переміщенням балансуючого елемента вздовж осі циліндричного корпусу в межах відстані між компенсаційними котушками.
Текст
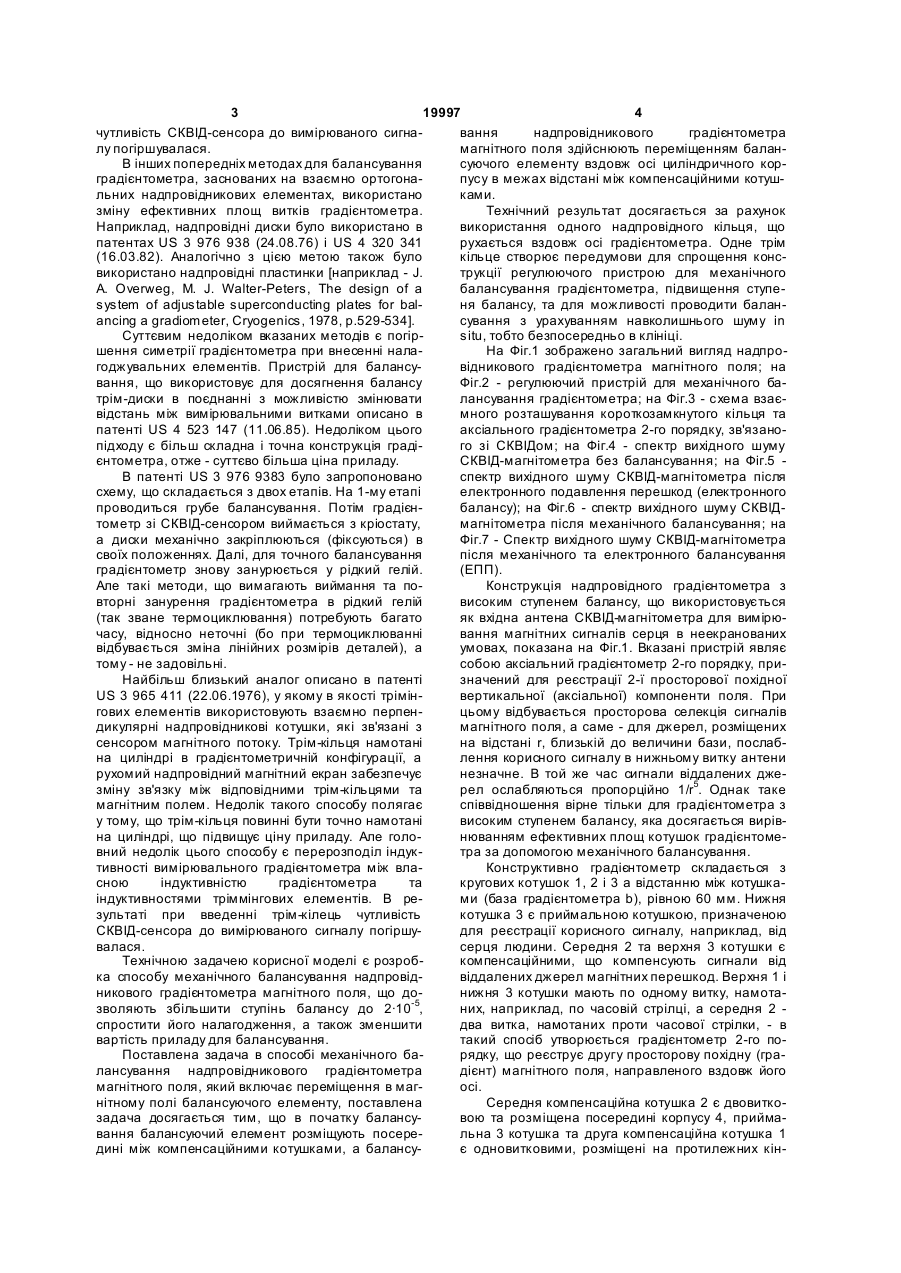
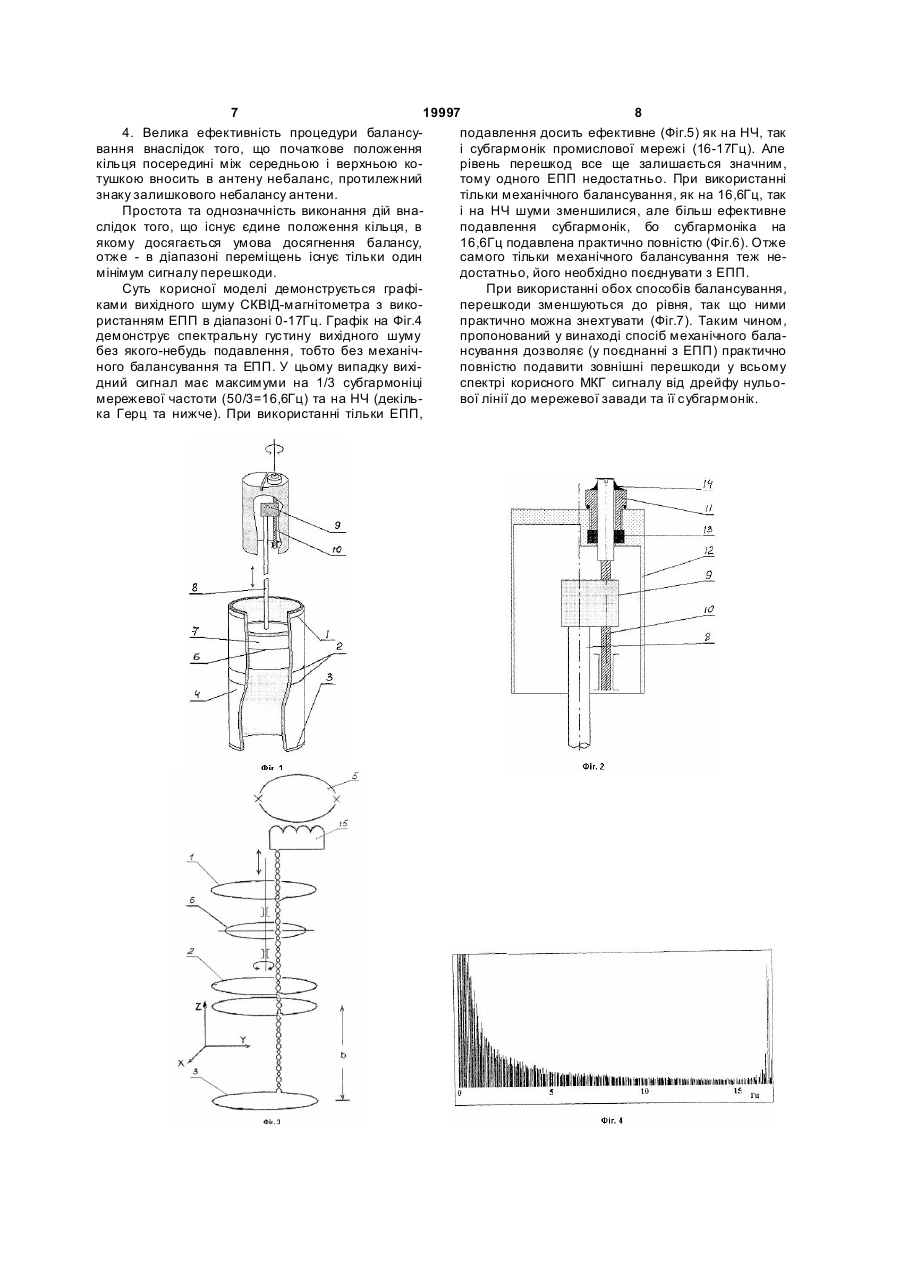
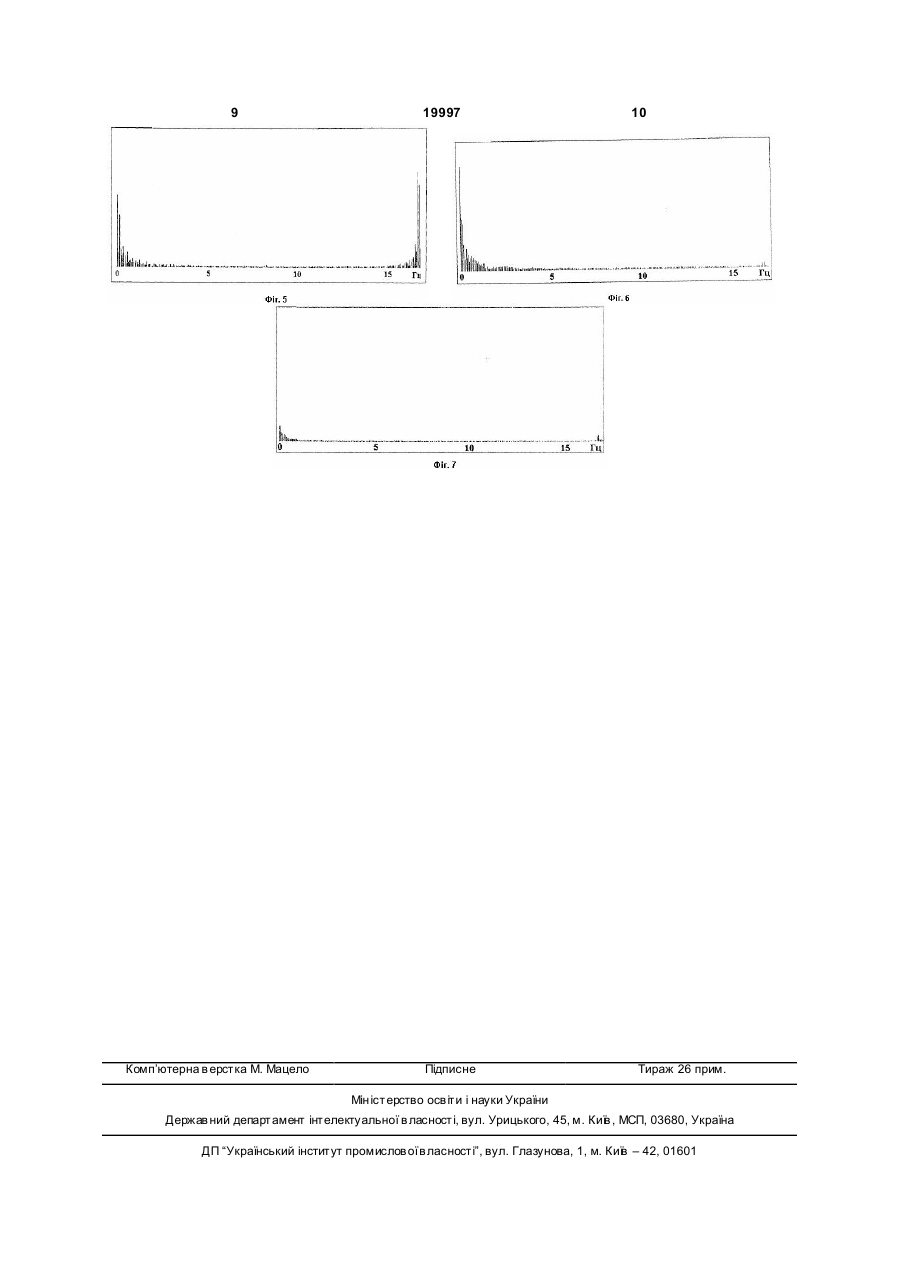
Спосіб механічного балансування надпровідникового градієнтометра магнітного поля, який 3 19997 4 чутливість СКВІД-сенсора до вимірюваного сигнавання надпровідникового градієнтометра лу погіршувалася. магнітного поля здійснюють переміщенням баланВ інших попередніх методах для балансування суючого елементу вздовж осі циліндричного корградієнтометра, заснованих на взаємно ортогонапусу в межах відстані між компенсаційними котушльних надпровідникових елементах, використано ками. зміну ефективних площ витків градієнтометра. Технічний результат досягається за рахунок Наприклад, надпровідні диски було використано в використання одного надпровідного кільця, що патентах US 3 976 938 (24.08.76) і US 4 320 341 рухається вздовж осі градієнтометра. Одне трім (16.03.82). Аналогічно з цією метою також було кільце створює передумови для спрощення консвикористано надпровідні пластинки [наприклад - J. трукції регулюючого пристрою для механічного A. Overweg, М. J. Walter-Peters, The design of a балансування градієнтометра, підвищення ступеsystem of adjustable superconducting plates for balня балансу, та для можливості проводити баланancing a gradiometer, Cryogenics, 1978, p.529-534]. сування з урахуванням навколишнього шуму in Суттєвим недоліком вказаних методів є погірsitu, тобто безпосередньо в клініці. шення симетрії градієнтометра при внесенні налаНа Фіг.1 зображено загальний вигляд надпрогоджувальних елементів. Пристрій для балансувідникового градієнтометра магнітного поля; на вання, що використовує для досягнення балансу Фіг.2 - регулюючий пристрій для механічного батрім-диски в поєднанні з можливістю змінювати лансування градієнтометра; на Фіг.3 - схема взаєвідстань між вимірювальними витками описано в много розташування короткозамкнутого кільця та патенті US 4 523 147 (11.06.85). Недоліком цього аксіального градієнтометра 2-го порядку, зв'язанопідходу є більш складна і точна конструкція градіго зі СКВІДом; на Фіг.4 - спектр вихідного шуму єнтометра, отже - суттєво більша ціна приладу. СКВІД-магнітометра без балансування; на Фіг.5 В патенті US 3 976 9383 було запропоновано спектр вихідного шуму СКВІД-магнітометра після схему, що складається з двох етапів. На 1-му етапі електронного подавлення перешкод (електронного проводиться грубе балансування. Потім градієнбалансу); на Фіг.6 - спектр вихідного шуму СКВІДтометр зі СКВІД-сенсором виймається з кріостату, магнітометра після механічного балансування; на а диски механічно закріплюються (фіксуються) в Фіг.7 - Спектр вихідного шуму СКВІД-магнітометра своїх положеннях. Далі, для точного балансування після механічного та електронного балансування градієнтометр знову занурюється у рідкий гелій. (ЕПП). Але такі методи, що вимагають виймання та поКонструкція надпровідного градієнтометра з вторні занурення градієнтометра в рідкий гелій високим ступенем балансу, що використовується (так зване термоциклювання) потребують багато як вхідна антена СКВІД-магнітометра для вимірючасу, відносно неточні (бо при термоциклюванні вання магнітних сигналів серця в неекранованих відбувається зміна лінійних розмірів деталей), а умовах, показана на Фіг.1. Вказані пристрій являє тому - не задовільні. собою аксіальний градієнтометр 2-го порядку, приНайбільш близький аналог описано в патенті значений для реєстрації 2-ї просторової похідної US 3 965 411 (22.06.1976), у якому в якості трімінвертикальної (аксіальної) компоненти поля. При гових елементів використовують взаємно перпенцьому відбувається просторова селекція сигналів дикулярні надпровідникові котушки, які зв'язані з магнітного поля, а саме - для джерел, розміщених сенсором магнітного потоку. Трім-кільця намотані на відстані r, близькій до величини бази, послабна циліндрі в градієнтометричній конфігурації, а лення корисного сигналу в нижньому витку антени рухомий надпровідний магнітний екран забезпечує незначне. В той же час сигнали віддалених джезміну зв'язку між відповідними трім-кільцями та рел ослабляються пропорційно 1/r5. Однак таке магнітним полем. Недолік такого способу полягає співвідношення вірне тільки для градієнтометра з у тому, що трім-кільця повинні бути точно намотані високим ступенем балансу, яка досягається вирівна циліндрі, що підвищує ціну приладу. Але голонюванням ефективних площ котушок градієнтомевний недолік цього способу є перерозподіл індуктра за допомогою механічного балансування. тивності вимірювального градієнтометра між влаКонструктивно градієнтометр складається з сною індуктивністю градієнтометра та кругових котушок 1, 2 і 3 а відстанню між котушкаіндуктивностями тріммінгових елементів. В реми (база градієнтометра b), рівною 60 мм. Нижня зультаті при введенні трім-кілець чутливість котушка 3 є приймальною котушкою, призначеною СКВІД-сенсора до вимірюваного сигналу погіршудля реєстрації корисного сигналу, наприклад, від валася. серця людини. Середня 2 та верхня 3 котушки є Технічною задачею корисної моделі є розробкомпенсаційними, що компенсують сигнали від ка способу механічного балансування надпровідвіддалених джерел магнітних перешкод. Верхня 1 і никового градієнтометра магнітного поля, що донижня 3 котушки мають по одному витку, намотазволяють збільшити ступінь балансу до 2·10-5, них, наприклад, по часовій стрілці, а середня 2 спростити його налагодження, а також зменшити два витка, намотаних проти часової стрілки, - в вартість приладу для балансування. такий спосіб утворюється градієнтометр 2-го поПоставлена задача в способі механічного барядку, що реєструє другу просторову похідну (гралансування надпровідникового градієнтометра дієнт) магнітного поля, направленого вздовж його магнітного поля, який включає переміщення в магосі. нітному полі балансуючого елементу, поставлена Середня компенсаційна котушка 2 є двовиткозадача досягається тим, що в початку балансувою та розміщена посередині корпусу 4, приймавання балансуючий елемент розміщують посерельна 3 котушка та друга компенсаційна котушка 1 дині між компенсаційними котушками, а балансує одновитковими, розміщені на протилежних кін 5 19997 6 цях корпусу 4, а саме: приймальна 3 - внизу, а кою градієнтометра. Ефективність пропонованого друга компенсаційна 1 - зверху. Всі котушки намометоду забезпечується тим, що трім-кільце 6 внотані цільним відрізком надпровідного дроту з ніосить в антену позитивний небаланс, який приблизбію, та з'єднані за допомогою прямого і зворотного но рівний по величині, але протилежний по знаку відрізків дроту, скручених та вкладених у вертикатехнологічному небалансу. При переміщенні трімльну канавку (Фіг.3). кільця вниз ефективна індуктивність верхньої коКорпус 4 має циліндричну форму і виготовлетушки 1 збільшується, а нижньої 3 - зменшується ний з немагнітного матеріалу (графіту) з коефіцієтак, що в антену вноситься додатковий позитивний нтом лінійного розширення, рівним такому у ніобію небаланс, і таким чином, початковий технологіч(матеріал проволоки). Витки котушок 1, 2 и 3 вміний баланс компенсується. щені в кільцеві проточки глибиною 0,2 мм, розтаТому в даної корисної моделі для подавлення шовані в поперечній площині. Корисний сигнал зовнішніх перешкод, спочатку трім-кільце 6 зміщувводиться в СКВІД 5 за допомогою сигнальної коється вниз до тих пір, поки вихідний сигнал СКВІДтушки 3, яка разом із градієнтометром утворює магнітометра 5 не досягне мінімуму. Якщо цього трансформатор магнітного потоку. не станеться, кільце 6 зміщується вниз до тих пір, Досягнення високого ступеня балансу такого поки вказаний сигнал не досягне мінімуму. Мінімум типу градієнтометрів обмежено 2-ма факторами: сигналу відповідає найкращому балансу градієн1) спіральною формою проточок та 2) магнітним тометра. Коли балансування завершено, трімзв'язком між витками середньої котушки 2. Причикільце 6 надійно фіксується за допомогою фіксуюна в тому, що проточки в циліндричному корпусі 4 чого лаку (позиція 14, Фіг.2), що наноситься між градієнтометра спіральної форми розташовані в гвинтом 10 та муфтою 11. Може бути використано площині, нахиленій до його осі, отже не є точно лак Red Tamper Evident Seal [ELECTROLUBE ® перпендикулярні до осі. В результаті в антену буAd vision ofH.K., Wentworth Limited, Blake House, де проникати паразитне магнітне поле, яке ствоWargrave, Berkshire, England]. рить суттєвий небаланс по поперечній компоненті У пропонованій реалізації балансування антеполя. Наявність магнітного зв'язку між витками ни виконується одним надпровідниковим короткосередньої котушки 2 приводить до збільшення її замкнутим трім-кільцем 6. Трім-кільце 6 виготовсумарної індуктивності. Тому, щоб досягти високолене з тонкого дроту діаметром 50 мікрон, з якої го технологічного балансу, градієнтометр в даній виготовлено і градієнтометр, яке не спотворює реалізації має такі відмінності: 1) проточки мають магнітний потік всередині градієнтометра. Вказане кільцеву форму, 2) відстань між витками середньої кільце 6 при виготовленні розміщується еквідистакотушки дорівнює 5мм. В результаті конструкція нтно між верхньою та середньою котушками в забезпечує початковий (технологічний) небаланс площині витків. Для уникнення фазових спотвопо аксіальній компоненті поля в діапазоні 4÷8·10-4 і рень, кільце 6 виготовлено з того ж матеріалу, з поперечній 2÷4·10-4. якого виготовлено і градієнтометр, тобто ніобія. Регулюючий пристрій для механічного баланПричина дії кільця на витки градієнтометра сування градієнтометра (Фіг.2) складається з одполягає в тому, що під дією ефекту квантування ного короткозамкнутого трім-кільця 6 змонтованого магнітного потоку у кільці наводиться екрануючий на немагнітному тримачі. Вказаний тримач забезструм, що прагне компенсувати внесений градієнпечує стабільну фіксацію трім-кільця в поперечній тометром магнітний потік. При внесенні кільця між площині, сформований циліндричним каркасом 7, котушками градієнтометра за рахунок магнітного тягою 8 та повзуном 9. Кільце 6 намотано і призв'язку відбувається взаємне екранування струмів. клеєно до немагнітного каркасу 7, який зв'язаний з Згідно пропонованого способу, спочатку необповзуном 9 через тягу 8. Повзун 9 кріпиться на хідно зміщувати трім-кільце вниз, бо, як правило, силовому гвинті 10 з точною різьбою і переміщутехнологічний небаланс перевищує (по величині) ється всередині градієнтометра в аксіальному нанебаланс, який вноситься кільцем. Проте, ефектипрямі за рахунок обертання гвинта 10. вність балансування ґрунтується саме на тому, що Силовий гвинт 10 є основною частиною прив початковому положенні (посередині між котушводу переміщення, що забезпечує плавний рух ками) позитивний небаланс трім-кільця по порядку каркасу 7 та трім-кільця 6 в аксіальному напрямі. величини дорівнює, а по знаку - протилежний заНа Фіг.2 схематично показує конструкцію приводу лишковому негативному небалансу антени. переміщення, що складається з гвинта 10, вставТаким чином, запропонований спосіб балансуленого в отвір різьбової муфти 11. Ця муфта 11 вання має ряд переваг перед відомими: вставлена в отвір корпусу зонду 12, а гвинт 10 1. Балансування здійснюється тільки одним рухається в ній. Між гвинтом 10 та кришкою кріобалансуючим елементом - короткозамкнутим кільстату встановлено силіконове ущільнення 13. цем. Обертання гвинта 10 приводить до руху вздовж осі 2. Відсутність паразитних спотворень горизонвверх і вниз повзуна 9, вісі тяги 5 і трім-кільця 6. тальних компонент поля перешкоди внаслідок маШвидкість руху визначається кроком різьби, і в лих розмірів кільця, обумовлених малим діаметданій реалізації становить 5 оборотів на 1мм. ром дроту, що зменшує взаємний вплив між В даній реалізації для подавлення зовнішніх каналами. перешкод пропонується простий спосіб з викорис3. Сильна чутливість до поля перешкоди внатанням трім-кільця 6. Цей спосіб ґрунтується на слідок великого діаметра трім-кільця, приблизно зміні ефективної індуктивності котушок градієнторівного діаметру антени, що визначає малий діаметра внаслідок взаємного магнітного зв'язку між пазон необхідного його переміщення (між середтрім-кільцем 6 та верхньою 1 і середньою 2 котушньою і верхньою котушками). 7 19997 8 4. Велика ефективність процедури балансуподавлення досить ефективне (Фіг.5) як на НЧ, так вання внаслідок того, що початкове положення і субгармонік промислової мережі (16-17Гц). Але кільця посередині між середньою і верхньою корівень перешкод все ще залишається значним, тушкою вносить в антену небаланс, протилежний тому одного ЕПП недостатньо. При використанні знаку залишкового небалансу антени. тільки механічного балансування, як на 16,6Гц, так Простота та однозначність виконання дій внаі на НЧ шуми зменшилися, але більш ефективне слідок того, що існує єдине положення кільця, в подавлення субгармонік, бо субгармоніка на якому досягається умова досягнення балансу, 16,6Гц подавлена практично повністю (Фіг.6). Отже отже - в діапазоні переміщень існує тільки один самого тільки механічного балансування теж немінімум сигналу перешкоди. достатньо, його необхідно поєднувати з ЕПП. Суть корисної моделі демонструється графіПри використанні обох способів балансування, ками вихідного шуму СКВІД-магнітометра з викоперешкоди зменшуються до рівня, так що ними ристанням ЕПП в діапазоні 0-17Гц. Графік на Фіг.4 практично можна знехтувати (Фіг.7). Таким чином, демонструє спектральну густину вихідного шуму пропонований у винаході спосіб механічного балабез якого-небудь подавлення, тобто без механічнсування дозволяє (у поєднанні з ЕПП) практично ного балансування та ЕПП. У цьому випадку вихіповністю подавити зовнішні перешкоди у всьому дний сигнал має максимуми на 1/3 субгармоніці спектрі корисного МКГ сигналу від дрейфу нульомережевої частоти (50/3=16,6Гц) та на НЧ (декільвої лінії до мережевої завади та її субгармонік. ка Герц та нижче). При використанні тільки ЕПП, 9 Комп’ютерна в ерстка М. Мацело 19997 Підписне 10 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for mechanically balancing a semiconductor magnetic field gradiometer
Автори англійськоюMinov Yurii Dmytrovych, Budnyk Mykola Mykolaiovych
Назва патенту російськоюСпособ механической балансировки полупроводникового градиентометра магнитного поля
Автори російськоюМинов Юрий Дмитриевич, Будник Николай Николаевич
МПК / Мітки
МПК: G01R 33/035, G03G 19/00
Мітки: балансування, механічного, надпровідникового, поля, градієнтометра, магнітного, спосіб
Код посилання
<a href="https://ua.patents.su/5-19997-sposib-mekhanichnogo-balansuvannya-nadprovidnikovogo-gradiehntometra-magnitnogo-polya.html" target="_blank" rel="follow" title="База патентів України">Спосіб механічного балансування надпровідникового градієнтометра магнітного поля</a>
Надпровідниковий градієнтометр магнітного поля
Номер патенту: 16882
Опубліковано: 15.08.2006
Автори: Мінов Юрій Дмитрович, Будник Микола Миколайович
МПК: G01R 33/035, G03G 19/00
Мітки: магнітного, надпровідниковий, поля, градієнтометр
Формула / Реферат:
1. Надпровідниковий градієнтометр магнітного поля, що включає циліндричний корпус, приймальну та дві компенсаційні котушки, намотані на циліндричний корпус цільним відрізком надпровідного дроту та з'єднані за допомогою прямого і зворотного відрізків дроту, скручених разом та вкладених у вертикальну проточку, причому перша компенсаційна котушка виконана двовитковою та розміщена посередині корпусу, а приймальна та друга компенсаційні котушки...
Сигналізатор магнітного поля
Номер патенту: 30541
Опубліковано: 15.11.2000
Автори: Бабиченко Владислав Михайлович, Хохряков Володимир Васильович, Руденко Михайло Васильович
МПК: G01R 33/02
Мітки: поля, сигналізатор, магнітного
Формула / Реферат:
1. Сигналізатор магнітного поля, що містить активну конструктивну частину із феромагнітного матеріалу, який відрізняється тим, що активна частина рухомо розміщена на нерухомій пасивній частині з діамагнітного матеріалу так, що під дією постійного магнітного поля активна частина зміщується і втрачає можливість повернення в початкове положення, сигналізуючи про факт дії магнітного поля.2. Сигналізатор магнітного поля по п.1, який...
Спосіб визначення абсолютної величини градієнта магнітного поля
Номер патенту: 17647
Опубліковано: 16.10.2006
Автори: Фенченко Володимир Миколайович, Рябовол Віктор Васильович
МПК: G01R 33/035, H01L 39/02
Мітки: визначення, поля, магнітного, спосіб, градієнта, величини, абсолютної
Формула / Реферат:
Спосіб визначення абсолютної величини градієнта магнітного поля за допомогою надпровідникового магнітоградієнтометра шляхом вимірювання різниці струму, наведеного в надпровідникових приймальних навоях вище вказаного магнітоградієнтометра чутливим елементом, - контактом Джозефсона, який відрізняється тим, що перед початком вимірювання встановлюють нульову точку шкали відліку шляхом переведення екрана з надпровідникового матеріалу, у внутрішній...
Вимірювач магнітного поля і температури
Номер патенту: 28393
Опубліковано: 16.10.2000
Автори: Прохорович Анатолій Вікторович, Венгер Євген Федорович, Варшава Славомир Степанович, Ющук Степан Іванович, Байцар Роман Іванович
МПК: H01L 43/08, G01K 7/32
Мітки: магнітного, поля, вимірювач, температури
Формула / Реферат:
Вимірювач магнітного поля і температури, що містить датчик магнітного поля з напівпровідникового монокристала InSb, терморезистор з напівпровідникового ниткоподібного монокристала, розташовані на підкладці, який відрізняється тим, що датчик магнітного поля виконано у вигляді магніторезистора з питомим опором матеріалу 0,01 Ом.см, терморезистор - з твердого розчину Si-Ge<Zn> з питомим опором 0,6-1,0 Oм.cм, а підкладку - з...
Датчик для вимірювання температури і магнітного поля
Номер патенту: 33148
Опубліковано: 15.02.2001
Автори: Варшава Славомир Степанович, Венгер Евген Федорович, Ющук Степан Іванович, Прохорович Анатолій Вікторович
МПК: G01K 7/00, H01L 43/00
Мітки: поля, температури, датчик, вимірювання, магнітного
Текст:
...Х-и,5 з питомим опором 5ии-Іши Омш контакти створені з привареного лудженого мідного дроту, закріпленого ІНДІЄМ. встановлено, що виготовлення чутливого елемента датчика а пресованого марганець-цинкового фериту даного складу І питомого опору *абе»~ печуе добру температурну чутливість датчика в Інтервалі U».,+IOU°C s коефіцієнтом тК0-£ 5&/R, а також його чутливість до магнітних полів s коефіцієнтом^^ Ом /тл дз Оскільки...
Попередній патент: Пристрій для електрогідроімпульсного калібрування трубчастих деталей
Наступний патент: Стабілізатор полум`я
Випадковий патент: Набір фасонних обкатних фрез для обробки зубчастих коліс