Спосіб визначення швидкості руху та координат транспортних засобів з подальшою їх ідентифікацією та автоматичною реєстрацією порушень правил дорожнього руху та пристрій для його реалізації
Номер патенту: 105418
Опубліковано: 12.05.2014
Автори: Осіпов Сєргєй Константіновіч, Малінкін Алєксєй Юрьєвіч
Формула / Реферат
1. Спосіб визначення швидкості руху і координат транспортних засобів з подальшою їх ідентифікацією і автоматичною реєстрацією порушень правил дорожнього руху, який передбачає випромінювання у напрямку транспортних засобів, які рухаються по ділянці дорожнього полотна, імпульсів електромагнітного випромінювання, прийом імпульсів відбитого електромагнітного випромінювання, обчислення дальності і швидкості руху транспортного засобу шляхом порівняння параметрів випромінених та прийнятих імпульсів і порівняння визначеної швидкості транспортного засобу з максимально дозволеною на даній ділянці з подальшими формуванням, у випадку реєстрації перевищення швидкості, сигналу для розпізнавання державного реєстраційного знака транспортного засобу - порушника, за допомогою відеокамери з подальшою ідентифікацією транспортного засобу і автоматичною реєстрацією порушень швидкісного режиму, який відрізняється тим, що вказані імпульси випромінюють радіолокатором синхронно з відеозйомкою тієї ж ділянки дорожнього полотна відеокамерою панорамного огляду, яка відкалібрована таким чином, що кожному елементу рядка Yi і кожному елементу стовпчика Хі матриці відеокамери поставлені у відповідність реальні координати відстаней від згаданої відеокамери до відповідних ділянок на дорожньому полотні, при цьому за прийнятими радіолокатором сигналами обчислюють дальності і швидкості всіх транспортних засобів, які знаходяться у даний момент на вибраній ділянці дорожнього полотна протяжністю декілька сотень метрів, і незалежно та синхронно за отриманим за допомогою згаданої відеокамери зображенням транспортного засобу обчислюють координати і швидкості тих же транспортних засобів, які потрапляють в кадр, після чого порівнюють зазначені, отримані незалежно один від одного за допомогою радіолокатора і відеокамери, потоки даних, які містять значення швидкостей і координат всіх транспортних засобів, які перебувають у даний момент на вибраній ділянці дорожнього полотна, причому для отримання метрологічно достовірних даних про швидкості і координати транспортних засобів використовують дані радіолокатора, і для кожного транспортного засобу, який порушує швидкісний режим, забезпечують подальший супровід до моменту розпізнавання державного реєстраційного знака, потім формують кадр зображення транспортного засобу - порушника з чітко видимим розпізнаним державним реєстраційним знаком, датою, часом, зафіксованою швидкістю та ідентифікатором відеокамери, що дозволяє здійснювати автоматичну реєстрацію порушень правил дорожнього руху.
2. Спосіб за п. 1, який відрізняється тим, що порівняння отриманих незалежно один від одного за допомогою радіолокатора і відеокамери потоків даних, які включають швидкості та координати всіх транспортних засобів, які знаходяться у даний момент на вибраній ділянці дорожнього полотна, здійснюють, наприклад, кореляційним методом.
3. Пристрій для визначення швидкості руху і координат транспортних засобів з подальшою їх ідентифікацією і автоматичною реєстрацією порушень швидкісного режиму, який має радіолокатор, принаймні одну відеокамеру для запису і розпізнавання державних реєстраційних знаків транспортних засобів, які порушують швидкісний режим і блок керування та обробки даних, з'єднаний з ними, який відрізняється тим, що використовують радіолокатор, який містить модуль обробки сигналів, який забезпечує обчислення швидкості і дальності всіх транспортних засобів, які знаходяться на вибраній ділянці дорожнього полотна, при цьому в пристрій введено відеокамеру панорамного огляду, яка сполучена з блоком керування і обробки даних, який оснащений програмним забезпеченням для синхронізації роботи радіолокатора і відеокамери панорамного огляду, порівняння їх потоків даних, отримання метрологічно достовірних результатів швидкостей і координат транспортних засобів, які порушили швидкісний режим та передачі даних для автоматичної реєстрації порушень правил дорожнього руху.
4. Пристрій за п. 3, який відрізняється тим, що функції відеокамери панорамного огляду і функції відеокамери розпізнавання державного реєстраційного знака виконує одна ширококутна мегапіксельна відеокамера.
5. Пристрій за п. 3, який відрізняється тим, що для запису і розпізнавання державного реєстраційного знака використовується декілька звичайних відеокамер відповідно до кількості смуг руху.
Текст
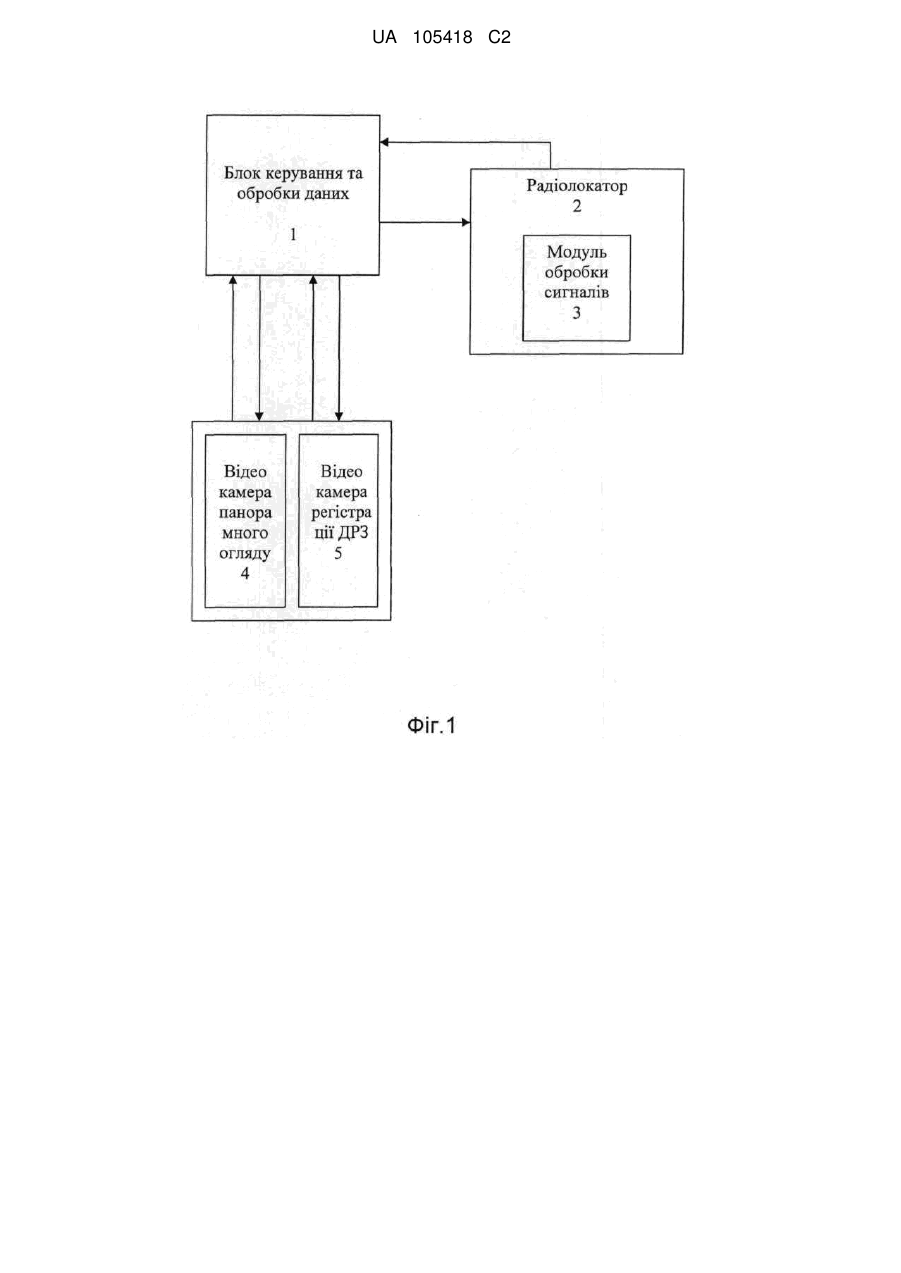
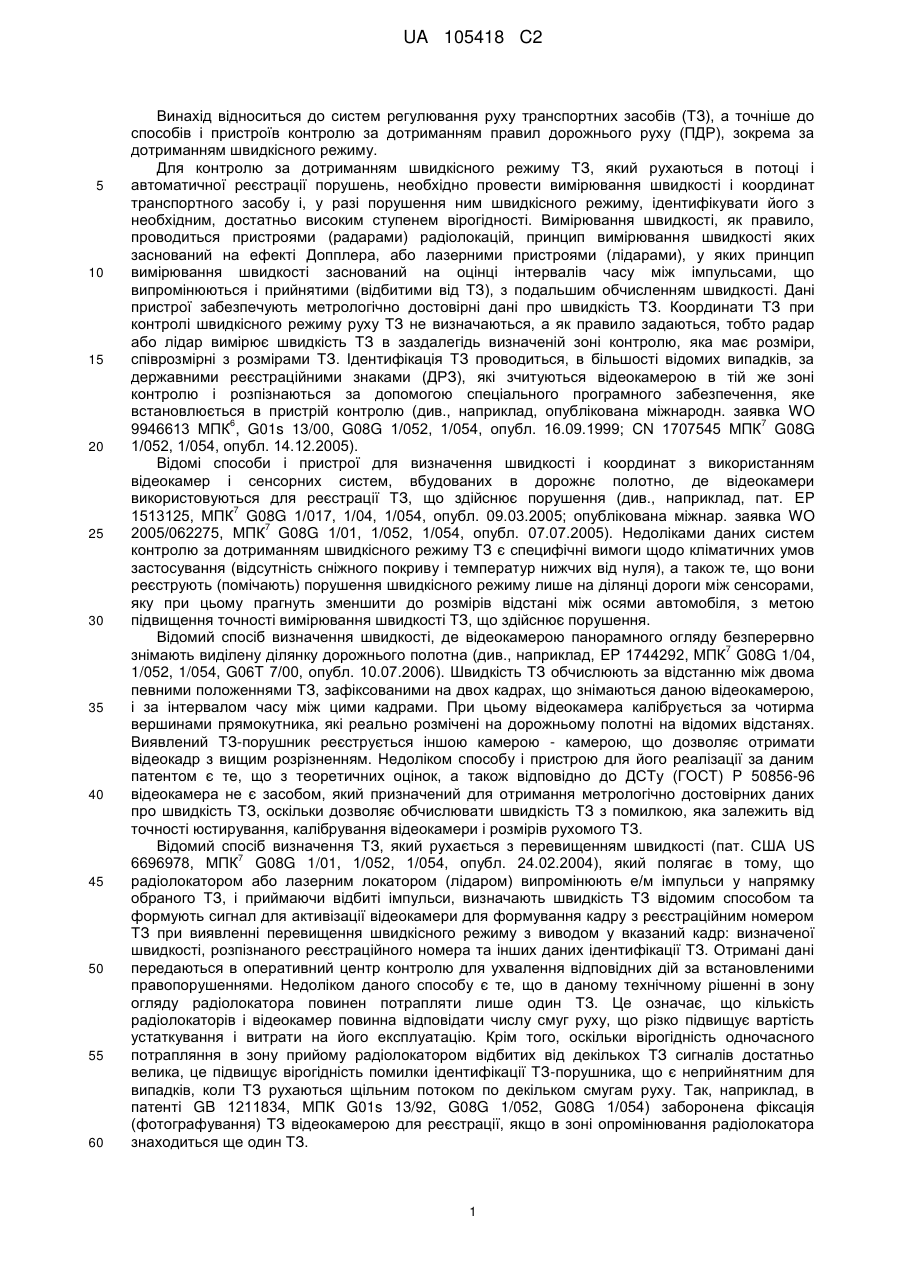
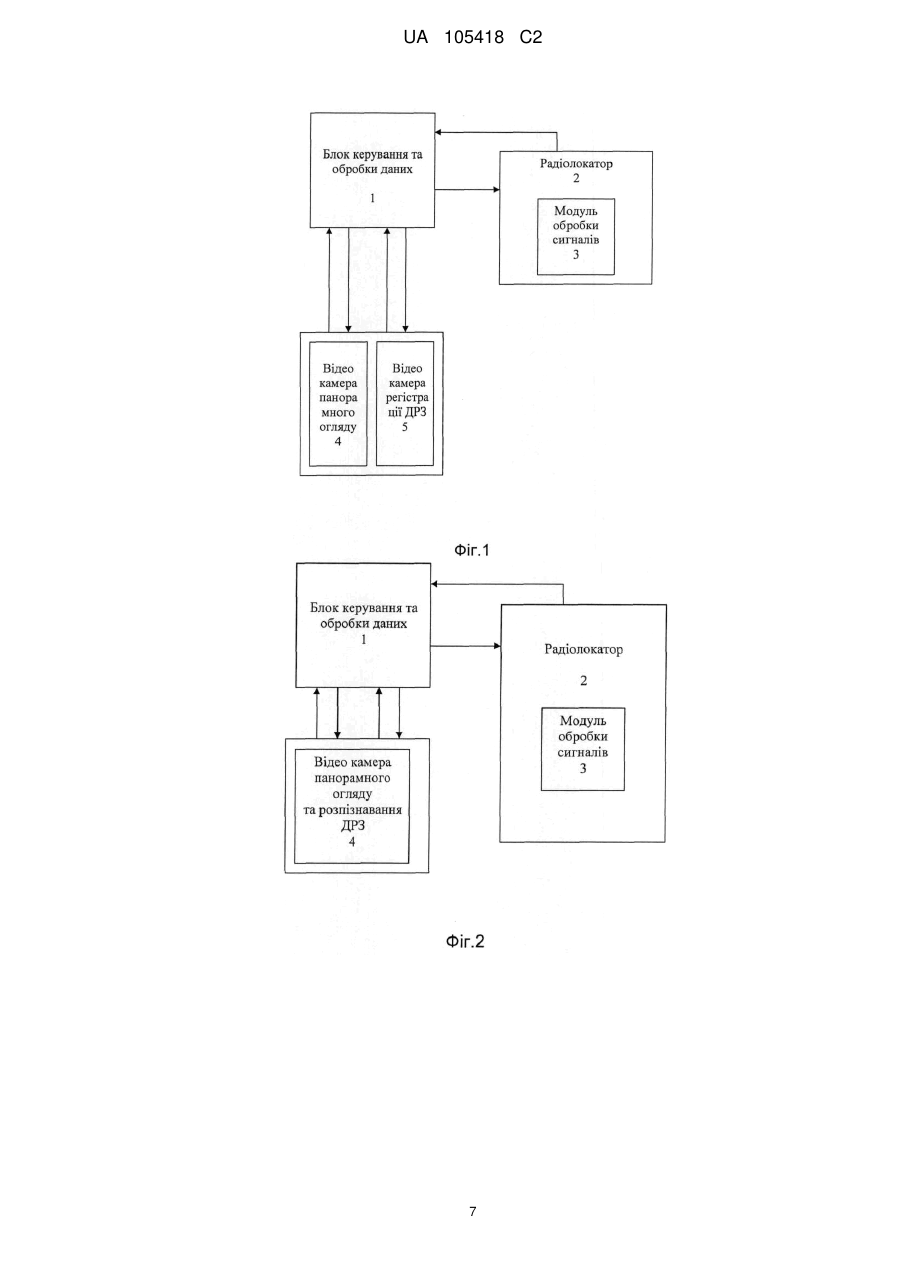
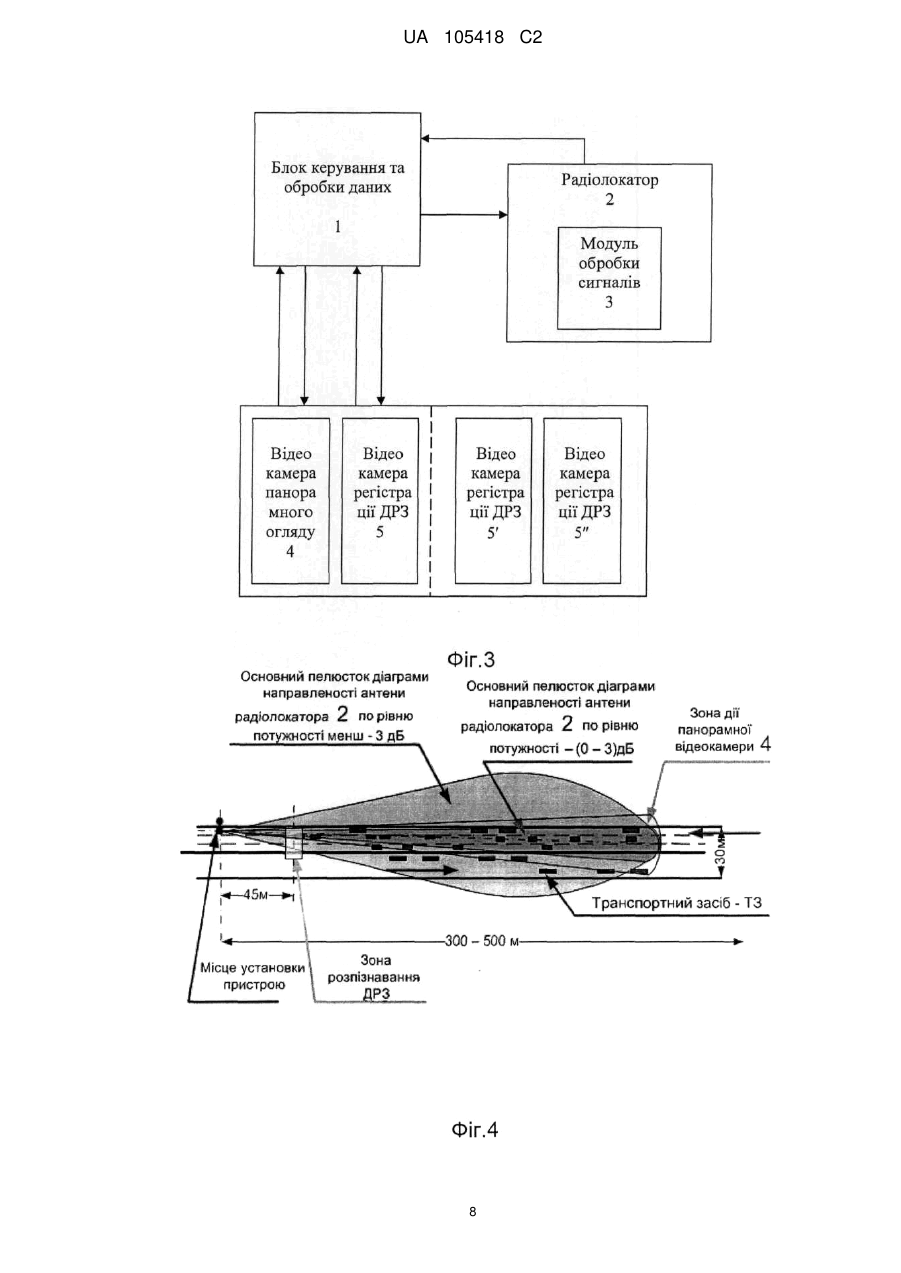
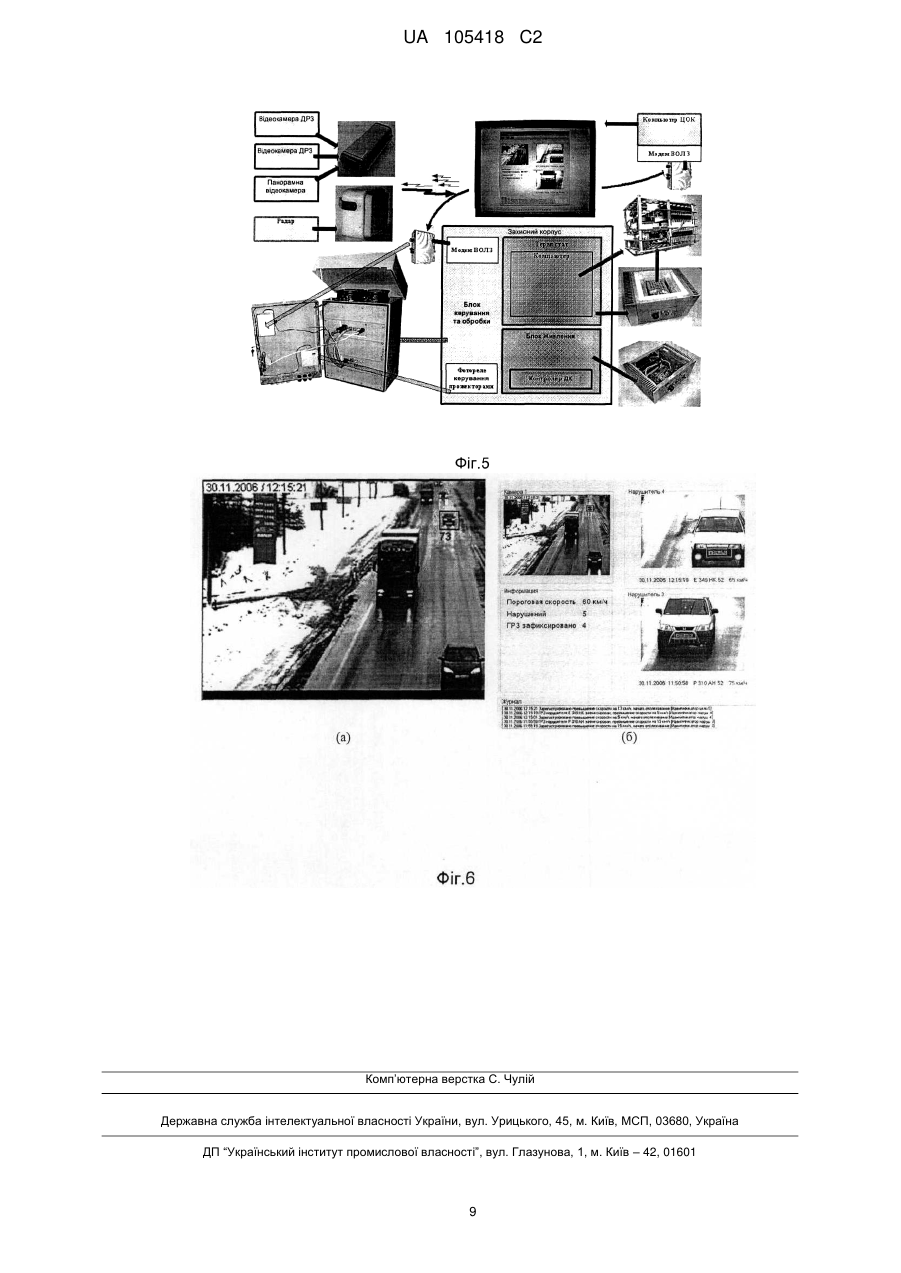
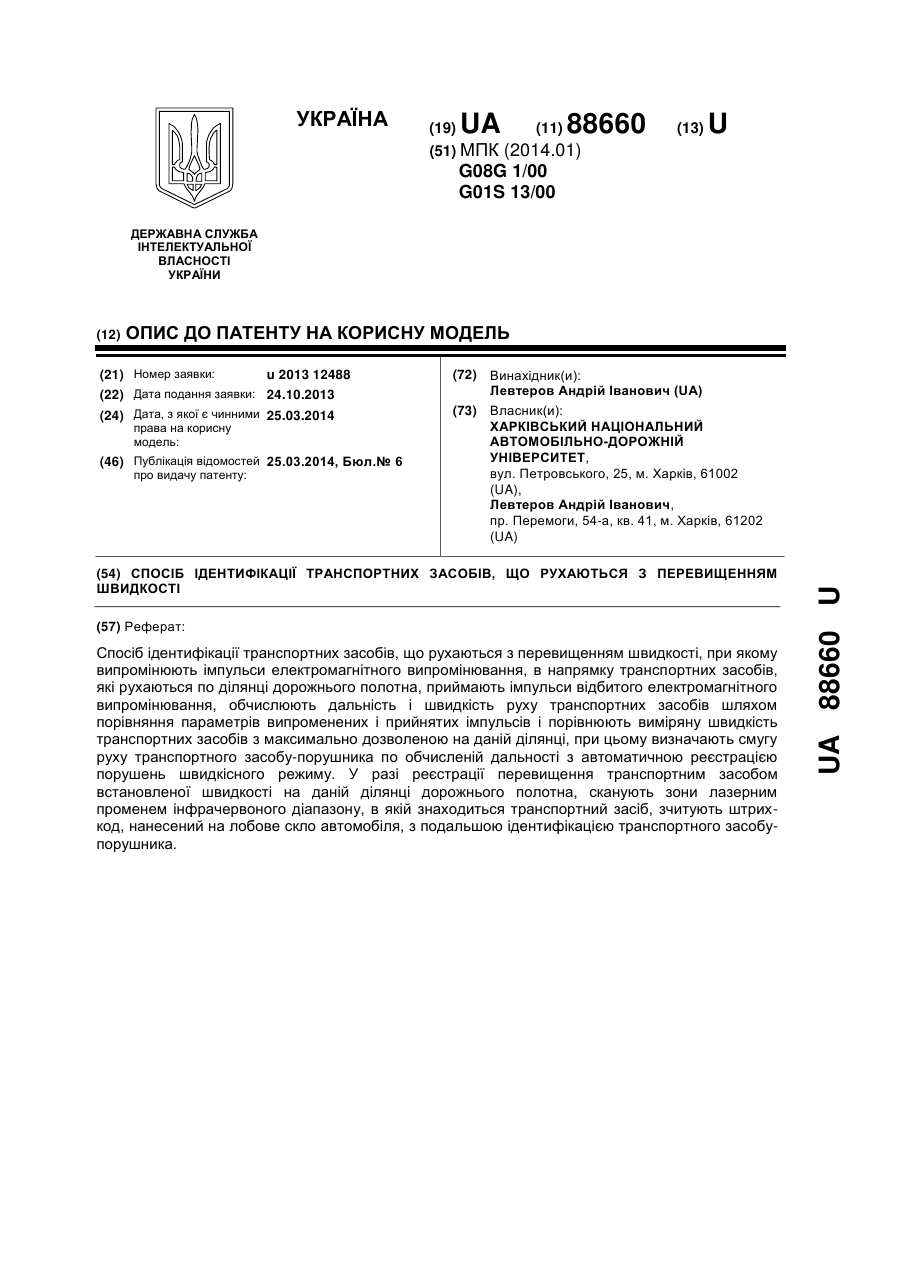
Реферат: Винахід належить до систем регулювання руху транспортних засобів, а точніше до способів і пристроїв контролю за дотриманням правил дорожнього руху, зокрема за дотриманням швидкісного режиму. Розроблена автоматична система забезпечує зменшення ймовірності помилки ідентифікації ТЗ-порушника, збільшує протяжність зони контролю швидкісного режиму руху до декількох сотень - тисячі метрів, дозволяє понизити витрати на будівництво і обслуговування естакад для установки пристроїв контролю швидкісного режиму. Для цього запропонований новий спосіб сумісної обробки сигналів від радіолокатора і відеокамери панорамного огляду, при якому використовуються незалежно отримані потоки даних від відеокамери і радіолокатора, після чого їх порівнюють і отримують дані про швидкості і координати з малою вірогідністю помилки ідентифікації ТЗ-порушника. Пристрій для здійснення запропонованого способу має радіолокатор з модулем обробки сигналів, який забезпечує обчислення швидкості і дальності всіх ТЗ, що знаходяться на вибраній ділянці дорожнього полотна, і відеокамеру панорамного огляду. UA 105418 C2 (12) UA 105418 C2 UA 105418 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід відноситься до систем регулювання руху транспортних засобів (ТЗ), а точніше до способів і пристроїв контролю за дотриманням правил дорожнього руху (ПДР), зокрема за дотриманням швидкісного режиму. Для контролю за дотриманням швидкісного режиму ТЗ, який рухаються в потоці і автоматичної реєстрації порушень, необхідно провести вимірювання швидкості і координат транспортного засобу і, у разі порушення ним швидкісного режиму, ідентифікувати його з необхідним, достатньо високим ступенем вірогідності. Вимірювання швидкості, як правило, проводиться пристроями (радарами) радіолокацій, принцип вимірювання швидкості яких заснований на ефекті Допплера, або лазерними пристроями (лідарами), у яких принцип вимірювання швидкості заснований на оцінці інтервалів часу між імпульсами, що випромінюються і прийнятими (відбитими від ТЗ), з подальшим обчисленням швидкості. Дані пристрої забезпечують метрологічно достовірні дані про швидкість ТЗ. Координати ТЗ при контролі швидкісного режиму руху ТЗ не визначаються, а як правило задаються, тобто радар або лідар вимірює швидкість ТЗ в заздалегідь визначеній зоні контролю, яка має розміри, співрозмірні з розмірами ТЗ. Ідентифікація ТЗ проводиться, в більшості відомих випадків, за державними реєстраційними знаками (ДРЗ), які зчитуються відеокамерою в тій же зоні контролю і розпізнаються за допомогою спеціального програмного забезпечення, яке встановлюється в пристрій контролю (див., наприклад, опублікована міжнародн. заявка WO 6 7 9946613 МПК , G01s 13/00, G08G 1/052, 1/054, опубл. 16.09.1999; CN 1707545 МПК G08G 1/052, 1/054, опубл. 14.12.2005). Відомі способи і пристрої для визначення швидкості і координат з використанням відеокамер і сенсорних систем, вбудованих в дорожнє полотно, де відеокамери використовуються для реєстрації ТЗ, що здійснює порушення (див., наприклад, пат. EP 7 1513125, МПК G08G 1/017, 1/04, 1/054, опубл. 09.03.2005; опублікована міжнар. заявка WO 7 2005/062275, МПК G08G 1/01, 1/052, 1/054, опубл. 07.07.2005). Недоліками даних систем контролю за дотриманням швидкісного режиму ТЗ є специфічні вимоги щодо кліматичних умов застосування (відсутність сніжного покриву і температур нижчих від нуля), а також те, що вони реєструють (помічають) порушення швидкісного режиму лише на ділянці дороги між сенсорами, яку при цьому прагнуть зменшити до розмірів відстані між осями автомобіля, з метою підвищення точності вимірювання швидкості ТЗ, що здійснює порушення. Відомий спосіб визначення швидкості, де відеокамерою панорамного огляду безперервно 7 знімають виділену ділянку дорожнього полотна (див., наприклад, EP 1744292, МПК G08G 1/04, 1/052, 1/054, G06T 7/00, опубл. 10.07.2006). Швидкість ТЗ обчислюють за відстанню між двома певними положеннями ТЗ, зафіксованими на двох кадрах, що знімаються даною відеокамерою, і за інтервалом часу між цими кадрами. При цьому відеокамера калібрується за чотирма вершинами прямокутника, які реально розмічені на дорожньому полотні на відомих відстанях. Виявлений ТЗ-порушник реєструється іншою камерою - камерою, що дозволяє отримати відеокадр з вищим розрізненням. Недоліком способу і пристрою для його реалізації за даним патентом є те, що з теоретичних оцінок, а також відповідно до ДСТу (ГОСТ) P 50856-96 відеокамера не є засобом, який призначений для отримання метрологічно достовірних даних про швидкість ТЗ, оскільки дозволяє обчислювати швидкість ТЗ з помилкою, яка залежить від точності юстирування, калібрування відеокамери і розмірів рухомого ТЗ. Відомий спосіб визначення ТЗ, який рухається з перевищенням швидкості (пат. США US 7 6696978, МПК G08G 1/01, 1/052, 1/054, опубл. 24.02.2004), який полягає в тому, що радіолокатором або лазерним локатором (лідаром) випромінюють е/м імпульси у напрямку обраного ТЗ, і приймаючи відбиті імпульси, визначають швидкість ТЗ відомим способом та формують сигнал для активізації відеокамери для формування кадру з реєстраційним номером ТЗ при виявленні перевищення швидкісного режиму з виводом у вказаний кадр: визначеної швидкості, розпізнаного реєстраційного номера та інших даних ідентифікації ТЗ. Отримані дані передаються в оперативний центр контролю для ухвалення відповідних дій за встановленими правопорушеннями. Недоліком даного способу є те, що в даному технічному рішенні в зону огляду радіолокатора повинен потрапляти лише один ТЗ. Це означає, що кількість радіолокаторів і відеокамер повинна відповідати числу смуг руху, що різко підвищує вартість устаткування і витрати на його експлуатацію. Крім того, оскільки вірогідність одночасного потрапляння в зону прийому радіолокатором відбитих від декількох ТЗ сигналів достатньо велика, це підвищує вірогідність помилки ідентифікації ТЗ-порушника, що є неприйнятним для випадків, коли ТЗ рухаються щільним потоком по декільком смугам руху. Так, наприклад, в патенті GB 1211834, МПК G01s 13/92, G08G 1/052, G08G 1/054) заборонена фіксація (фотографування) ТЗ відеокамерою для реєстрації, якщо в зоні опромінювання радіолокатора знаходиться ще один ТЗ. 1 UA 105418 C2 5 10 15 20 25 30 35 40 45 50 55 Найбільш близьким до запропонованого способу за технічною сутністю є спосіб визначення швидкості руху і координат транспортних засобів з подальшою їх ідентифікацією і автоматичною 7 реєстрацією порушень дорожнього руху відповідно до пат. США US 6266627, МПК G08G 1/00, 1/052, 1/054, G01s 13/00, опубл. 24.07.2001. Даний спосіб полягає в тому, що у напрямку ТЗ, який рухається по ділянці дорожнього полотна випромінюють імпульси е/м випромінювання, приймають імпульси відбитого е/м випромінювання, обчислюють дальність і швидкість руху транспортних засобів шляхом порівняння параметрів випромінюваних і прийнятих імпульсів, і порівнюють визначену швидкість ТЗ з максимально дозволеною на даній ділянці з подальшим формуванням, у разі реєстрації перевищення швидкості, сигналу для фіксації реєстраційного номера ТЗ, що здійснює порушення, за допомогою відеокамери з подальшою ідентифікацією ТЗ і автоматичною реєстрацією порушень швидкісного режиму. При цьому визначають смугу руху ТЗ-порушника за обчисленою дальністю. Даний спосіб також має вищезгаданий недолік - велику вірогідність помилкового визначення ТЗ-порушника при фактичній відсутності порушення, що можна пояснити таким чином. Для пояснення розглянемо реальну ситуацію, показану на Фіг. 1 в описі даного патенту. На представленій в патенті Фіг. 1 промінь радіолокатора показаний таким, що розходиться під кутом 4-5°, що є ідеалізацією, яка використовується в теоретичних розрахунках, і відповідає потужності випромінювання за рівнем -3 дБ основної пелюстки діаграми спрямованості радіолокатора. Реальна діаграма спрямованості антени радіолокатора з урахуванням потужності основної пелюстки за рівнем від -3 дБ до орієнтовно -20 дБ є значно ширшою і завжди містить бічні пелюстки, як показано на Фіг. 1 додаткових матеріалів, що стосуються патенту-прототипу, і виділено рожевим кольором з штрихуванням. Як видно з Фіг. 1, в зоні розкриття діаграми антени (як в основній, так і в бічних пелюстках) присутні сигнали, відбиті від ТЗ. Всі ТЗ, які потрапили на дугу радіусом R (показано на Фіг. 1 у вигляді заштрихованого сектора зеленого кольору) знаходяться на одній відстані від радіолокатора і, отже, імпульси, відбиті від цих ТЗ, прийдуть на радіолокатор одночасно. З Фіг. 1 видно, що, принаймні, три автотранспортні засоби, які рухаються по абсолютно різних смугах руху знаходяться на одній відстані, і відбиті від них сигнали прийдуть в один час, але з різною потужністю. Потужність прийнятих сигналів Pr визначається формулою 2 де Pr - потужність прийнятих сигналів Pt - потужність випромінених сигналів, Ga - квадрат коефіцієнта посилення антени радіолокатора, So - ефективна відзеркалювальна поверхня цілі, 4 R - четвертий ступінь відстані об'єкту від радіолокатора, є функцією декількох параметрів, що змінюються. Таким чином, можливо, що потужність прийнятих сигналів Рr, відбитих від ТЗ з малою So (малі габарити ТЗ) при великій потужності Pt (основна пелюстка діаграми спрямованості радіолокатора) може бути співрозмірною з потужністю Рг прийнятих сигналів, відбитих від ТЗ з великою So (великі габарити ТЗ) при малій потужності Pt (бічні пелюстки діаграми спрямованості радіолокатора), який рухається по іншій смузі руху і який не здійснює порушення швидкісного режиму, що може привести до помилки у визначенні ТЗ-порушника. Приведемо як приклад посилання з вельми авторитетного джерела (Довідник по радіолокації, під редакцією M. Сколніка, т.1, Розділ 9, стор.356): «'"' будь-яке чисельне значення ЕПР (So у вищезгаданій формулі) справедливе тільки для конкретних цілей, комбінації поляризацій, просторового положення і частоти, для якої це значення і було визначене. В більшості випадків, які представляють практичний інтерес, ЕПР цілі може змінюватися в широких межах: на 20-30 дБ і більше при порівняно невеликій зміні будь-якого з цих параметрів». Таким чином, цілком очевидною є ситуація, коли радіолокатор приймає відбиті сигнали як від ТЗ, який рухається по контрольованій смузі руху і чітко розрізняється видеокамерою, так і від ТЗ, який рухається по сусідній смузі руху. Припустивши, що відстані співрозмірні, площа ТЗ, який рухається паралельно до контрольованого ТЗ, у декілька разів більша, а швидкість перевищує дозволену, отримаємо ситуацію, при якій пристрій видасть сигнал про перевищення швидкості ТЗ, який знаходиться в зоні контролю. Якщо вірогідність даних подій велика (насичений трафік руху), то кількість помилково зафіксованих порушень буде надзвичайно великою, що різко понизить експлуатаційні характеристики способу-прототипу. Виходячи з вищенаведеного аналізу, можна стверджувати, що спосіб-прототип має істотний недолік, а саме велику вірогідність помилки ідентифікації ТЗ-порушника, що робить спосібпрототип неприйнятним для використання на дорожньому полотні з великою кількістю смуг руху при щільному транспортному потоці. 2 UA 105418 C2 5 10 15 20 25 30 35 40 45 50 55 Найбільш близьким до запропонованого пристрою за технічною сутністю є пристрій для визначення швидкості руху і координат транспортних засобів з подальшою їх ідентифікацією і автоматичною реєстрацією порушень дорожнього руху відповідно до пат. США US 6266627, 7 МПК G08G 1/00, 1/052, 1/054, G01s 13/00, опубл. 24.07.2001. Пристрій містить радіолокатор, відеокамеру для запису і розпізнавання ДРЗ і блок обробки і керування даними, з'єднаний з ними і який включає сполучений із згаданою відеокамерою засіб для вироблення сигналу - мітки у випадку, коли реєструється порушення швидкісного режиму. Недоліком даного пристрою, що реалізовує вищеописаний спосіб також, як і в попередніх аналогах, є велика вірогідність помилки ідентифікації ТЗ-порушника, що робить неможливим його використання на дорожньому полотні з великою кількістю смуг руху і/або при щільному транспортному потоці. Крім того, недоліком пристрою-прототипу є невелика протяжність зони контролю - не більше 20-30 метрів. Завданнями, на вирішення яких направлений запропонований винахід, є: - розробка способу визначення швидкості руху і координат транспортних засобів і пристрою для його здійснення, які забезпечують зниження вірогідності помилки ідентифікації ТЗпорушника в системах автоматичної реєстрації порушень швидкісного режиму руху ТЗ; - збільшення протяжності зони контролю швидкісного режиму руху з одного - двох десятків метрів до декількох сотень - тисячі метрів; - використання одного, а не декількох пристроїв для контролю ділянок дороги з багатосмуговим рухом. Вирішення даної задачі дозволить різко знизити витрати на будівництво і обслуговування естакад для установки пристроїв контролю швидкісного режиму. Поставлені завдання в частині способу досягаються за рахунок того, що в розробленому способі, як і в способі-прототипі випромінюють у напрямку транспортних засобів, які рухаються по ділянці дорожнього полотна імпульси е/м випромінювання, приймають імпульси відбитого е/м випромінювання, обчислюють дальність і швидкість руху, принаймні, одного транспортного засобу шляхом порівняння параметрів випромінених та прийнятих імпульсів і порівнюють визначену швидкість транспортного засобу з максимально дозволеною на даній ділянці, з подальшим формуванням у випадку реєстрації перевищення швидкості, сигналу для розпізнавання ДРЗ транспортного засобу - порушника за допомогою відеокамери з подальшою ідентифікацією транспортного засобу і автоматичною реєстрацією порушень правил дорожнього руху (ПДР). Новим, в розробленому способі, є те, що згадані імпульси випромінюють радіолокатором синхронно з відеозйомкою тієї ж ділянки дорожнього полотна відеокамерою панорамного огляду, яка відкалібрована таким чином, що кожному елементу рядка Yi і кожному елементу стовпчика Xi матриці відеокамери ставлять у відповідність реальні координати відстаней від згаданої відеокамери до відповідних ділянок на дорожньому полотні. При цьому за прийнятими радіолокатором сигналами обчислюють відстань і швидкість не одного, а всіх транспортних засобів, які знаходяться у даний момент на обраній ділянці дорожнього полотна протяжністю декілька сотень метрів, і, незалежно і синхронно, за отриманим за допомогою згаданої відеокамери зображенням транспортних засобів обчислюють координати і швидкості тих же транспортних засобів, які знаходяться в кадрі. Після чого порівнюють згадані, отримані незалежно один від одного за допомогою радіолокатора і відеокамери потоки даних, які містять значення швидкостей і координат всіх транспортних засобів, які знаходяться у даний момент на обраній ділянці дорожнього полотна. При цьому для отримання метрологічно достовірних значень швидкостей і координат транспортних засобів, використовують дані радіолокатора. Для кожного ТЗ, який порушує ПДР, забезпечується подальший супровід до моменту розпізнавання ДРЗ, потім формують кадр зображення ТЗ-порушника з чітко видимим ДРЗ, розпізнаним ДРЗ, датою, часом і зафіксованою швидкістю і/або координатою, що дозволяє здійснювати автоматичну реєстрацію порушень ПДР. У першому окремому випадку реалізації розробленого способу доцільно здійснювати порівняння згаданих, отриманих незалежно один від одного за допомогою радіолокатора і відеокамери, потоків даних, які містять значення швидкостей і координат всіх транспортних засобів, які знаходяться у даний момент на обраній ділянці дорожнього полотна, наприклад, кореляційним методом. Поставлені завдання в частині пристрою досягаються за рахунок того, що розроблений пристрій, як і пристрій-прототип містить радіолокатор, відеокамеру для запису і розпізнавання ДРЗ транспортних засобів, які порушують ПДР і блок керування і обробки даних, сполучений з ними. 3 UA 105418 C2 5 10 15 20 25 30 35 40 45 50 55 Новим в розробленому пристрої є те, що як радіолокатор використовується радіолокатор, який має модуль обробки сигналів, який здійснює обчислення швидкості і дальності всіх ТЗ, які знаходяться на обраній ділянці дорожнього полотна, при цьому в пристрій введена відеокамера панорамного огляду, що забезпечує зйомку ділянки дороги від 40-50 метрів до декількох сотень метрів, яка сполучена з блоком керування і обробки даних, який оснащений програмним забезпеченням для синхронізації роботи радіолокатора і відеокамери панорамного огляду, порівняння потоків даних, які приймаються від них, отримання метрологічно достовірних результатів вимірювання швидкостей і координат ТЗ, які порушили швидкісний режим руху, і передачі даних для автоматичної реєстрації порушень правил дорожнього руху. У першому окремому випадку реалізації пристрою доцільно функції відеокамери для панорамного огляду і функції відеокамери для розпізнавання ДРЗ виконувати однією ширококутною «мегапіксельною» відеокамерою. У другому окремому випадку реалізації пристрою для запису і розпізнавання ДРЗ доцільно використовувати декілька «звичайних» відеокамер, відповідно до кількості смуг руху. На Фіг. 1 представлена блок-схема розробленого пристрою за п. 3 формули. На Фіг. 2 представлена блок-схема розробленого пристрою за π. 4 формули. На Фіг. 3 представлена блок-схема розробленого пристрою за п. 5 формули з використанням декількох відеокамер для розпізнавання ДРЗ у відповідності до кількості смуг руху. На Фіг. 4 представлена схема, яка пояснює роботу пристрою на контрольованій ділянці дороги. На Фіг. 5 представлений зовнішній вигляд і структура блоків і вузлів, які входять до складу розробленого пристрою. На Фіг. 6 представлений приклад конкретної реалізації відображення результатів роботи пристрою на екрані монітора в оперативному центрі керування дорожнім рухом. Пристрій, представлений на Фіг. 1, містить блок 1 керування і обробки, радіолокатор 2 з модулем 3 обробки сигналів, відеокамеру панорамного огляду 4 і відеокамеру розпізнавання ДРЗ 5. Блоком 1 керування і обробки даних є комп'ютер з програмним забезпеченням, який здійснює: - керування роботою радіолокатора 2 і відеокамер 4, 5 - прийом сигналів від відеокамер 4, 5 - прийом даних від модуля 3 обробки сигналів радіолокатора 2 - формування потоків даних координат і швидкостей ТЗ, які знаходяться в кадрі відеокамери 4 - порівняння потоків даних від модуля 3 радіолокатора 2 і відеокамери 4 - передачу даних на центральний пост (не представлений) керування дорожнім рухом для автоматичної реєстрації порушень правил дорожнього руху. Конкретна реалізація блоку 1 керування і обробки виконана на базі процесора «Інтел Пентіум-М». Блок 1 має високу продуктивність, порівняно низьке енергоспоживання (~40 Bt), конструктивно захищений від механічних впливів оригінальною системою амортизації і призначений для роботи в діапазоні температур від -40 до +60 °C (Див. Фіг. 5). Як радіолокатор 2 використовується радіолокатор виконаний за класичною моноімпульсною схемою з подальшим цифровим накопиченням і обробкою прийнятих імпульсів. Частота несучого випромінювання 24,15 ГГц. Тривалість імпульсу за рівнем 0,5Р випр.=30 нc. Період повторення імпульсів 25 мкс. Модуль 3 обробки сигналів радіолокатора 2 містить процесор, який дозволяє одночасно виділяти, формувати і накопичувати пакети з 256 1024 імпульсів для кожного елементу дальності, виконувати над ними швидке перетворення Фур'є і виявляти відбиті від ТЗ сигнали. Модуль 3 дозволяє також проводити селекцію ТЗ за швидкостями, починаючи з нульових. Роль відеокамери панорамного огляду 4, в одному окремому випадку, виконує ширококутна «мегапіксельна» відеокамера, яка одночасно виконує і функції відеокамери розпізнавання ДРЗ 5, оскільки має характеристики високого розрізнення за рахунок більшого (у 5-10 разів) числа елементів матриці, у порівнянні із звичайною відеокамерою. Застосування такого варіанту є доцільним для ділянок дороги з великим числом смуг руху (більше двох). У іншому окремому випадку як панорамна відеокамера 4 використовуються одна ширококутна відеокамера панорамного огляду 4 і декілька відеокамер 5 для розпізнавання ДРЗ відповідно до кількості смуг руху, що є доцільним для ділянок дороги з малим числом смуг руху, оскільки звичайні відеокамери набагато дешевші мегапіксельної. 4 UA 105418 C2 5 10 15 20 25 30 35 40 45 50 55 60 Розроблений спосіб визначення швидкості руху і координат транспортних засобів з подальшою їх ідентифікацією і автоматичною реєстрацією порушень дорожнього руху відповідно до п. 1 формули реалізують за допомогою пристрою, представленого на Фіг. 1, таким чином. Перед початком роботи пристрою здійснюють його попереднє калібрування, під час якого кожному елементу рядка Yi і кожному елементу стовпчика Xi матриці відеокамери панорамного огляду 4 ставлять у відповідність координати відстаней від згаданої відеокамери 4 до відповідних ділянок на дорожньому полотні. Це необхідно для проведення незалежної оцінки швидкості ТЗ за допомогою відеокамери 4. Далі, як показано на Фіг. 4, радіолокатором 2 випромінюють е/м імпульси у напрямку ТЗ, який рухається на обраній ділянці дорожнього полотна і приймають відбиті імпульси. Синхронно з випромінюванням радіолокатора 2 проводять відеозйомку тієї ж ділянки дорожнього полотна відеокамерою 4. Зона дії основної пелюстки антени радіолокатора 2 конструктивно зв'язана із зоною огляду панорамної відеокамери 4, як показано на Фіг. 4. Після чого, за прийнятим радіолокатором 2 сигналам, за допомогою модуля З обчислюють відстань і швидкість всіх транспортних засобів, які знаходяться у даний момент на обраній ділянці дорожнього полотна, і незалежно і синхронно за отриманим за допомогою відеокамери 4 зображенням транспортних засобів обчислюють, за допомогою блоку 1 керування і обробки, координати і швидкості тих же транспортних засобів. Потім за допомогою блоку 1 порівнюють, наприклад, кореляційним методом відповідно до п. 2 формули, згадані, отримані незалежно один від одного потоки даних, які містять швидкості і координати всіх ТЗ, які знаходяться у даний момент на вибраній ділянці дорожнього полотна. Метрологічно достовірними даними про швидкості і координати Yi транспортних засобів визнаються дані, отримані від радіолокатора 2. Достовірними даними про координати Xi, тих же транспортних засобів, визнаються дані, отримані від відеокамери 4. У випадку перевищення транспортними засобами встановленого порогу швидкості на даній ділянці вони позначаються як ТЗ-порушники швидкісного режиму, і для кожного з них забезпечується подальший супровід блоком 1 керування і обробки до дальності, яка дозволяє провести розпізнавання їх ДРЗ відеокамерою 5. Потім блоком 1 проводиться автоматичне розпізнавання ДРЗ і формування кадру зображення ТЗ-порушника з виразно видимим ДРЗ, результатом розпізнавання ДРЗ, датою, часом, ідентифікатором відеокамери 5 і зафіксованою швидкістю, що дозволяє здійснювати автоматичну реєстрацію порушень ПДР. Таким чином, оскільки в розробленому способі використовуються метрологічно достовірні дані про координати і швидкості ТЗ, які відслідковуються на всіх смугах дорожнього полотна одночасно, то вірогідність помилки ідентифікації ТЗ автоматичної системи реєстрації порушень ПДР є низькою у порівнянні з прототипом. Приклад конкретної реалізації відображення результатів роботи пристрою на екрані монітора в центрі оперативного управління (ЦОУ) дорожнім рухом представлений на Фіг. 6. На Фіг. 6 (а) представлений кадр зйомки панорамної відеокамери, на якому показаний порушник, обведений рамкою і вказана його фактична швидкість 73 км/год. У лівому верхньому кутку кадру вказані дата і час зафіксованого правопорушення. На Фіг. 6 (б) показаний фрагмент журналу подій, що зберігаються в базі даних з історією зафіксованих правопорушень. Задана порогова швидкість 60 км/год. У журнал заносяться всі ТЗ-порушники, швидкість яких перевищує встановлений поріг, при цьому фіксується швидкість, розпізнаний ДРЗ, дата і час порушення. У правому верхньому кутку показано панорамне зображення контрольованої ділянки дороги з порушником, справа показані кадри зйомки автомобіля з розпізнаним ДРЗ. Ці дані передаються в центр оперативного управління, де складається протокол про адміністративне правопорушення. Таким чином, технічний результат, який забезпечується запропонованим способом і пристроєм для його реалізації, полягає в: - зниженні вірогідності помилки ідентифікації ТЗ автоматичною системою реєстрації порушень ПДР, який досягається за рахунок застосування двох незалежних способів визначення швидкостей і координат ТЗ за допомогою відеокамери і радіолокатора з подальшим порівнянням результатів вимірювань, що дозволяє зменшити загальну вірогідність помилки ідентифікації; - збільшенні протяжності зони контролю швидкісного режиму руху від одного - двох десятків метрів до декількох сотень метрів; - використанні одного, а не декількох пристроїв для контролю ділянок дороги з багатосмуговим рухом; що дозволяє вирішити поставлені завдання. 5 UA 105418 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 30 35 40 45 50 55 1. Спосіб визначення швидкості руху і координат транспортних засобів з подальшою їх ідентифікацією і автоматичною реєстрацією порушень правил дорожнього руху, який передбачає випромінювання у напрямку транспортних засобів, які рухаються по ділянці дорожнього полотна, імпульсів електромагнітного випромінювання, прийом імпульсів відбитого електромагнітного випромінювання, обчислення дальності і швидкості руху транспортного засобу шляхом порівняння параметрів випромінених та прийнятих імпульсів і порівняння визначеної швидкості транспортного засобу з максимально дозволеною на даній ділянці з подальшими формуванням, у випадку реєстрації перевищення швидкості, сигналу для розпізнавання державного реєстраційного знака транспортного засобу - порушника, за допомогою відеокамери з подальшою ідентифікацією транспортного засобу і автоматичною реєстрацією порушень швидкісного режиму, який відрізняється тим, що вказані імпульси випромінюють радіолокатором синхронно з відеозйомкою тієї ж ділянки дорожнього полотна відеокамерою панорамного огляду, яка відкалібрована таким чином, що кожному елементу рядка Yi і кожному елементу стовпчика Хі матриці відеокамери поставлені у відповідність реальні координати відстаней від згаданої відеокамери до відповідних ділянок на дорожньому полотні, при цьому за прийнятими радіолокатором сигналами обчислюють дальності і швидкості всіх транспортних засобів, які знаходяться у даний момент на вибраній ділянці дорожнього полотна протяжністю декілька сотень метрів, і незалежно та синхронно за отриманим за допомогою згаданої відеокамери зображенням транспортного засобу обчислюють координати і швидкості тих же транспортних засобів, які потрапляють в кадр, після чого порівнюють зазначені, отримані незалежно один від одного за допомогою радіолокатора і відеокамери, потоки даних, які містять значення швидкостей і координат всіх транспортних засобів, які перебувають у даний момент на вибраній ділянці дорожнього полотна, причому для отримання метрологічно достовірних даних про швидкості і координати транспортних засобів використовують дані радіолокатора, і для кожного транспортного засобу, який порушує швидкісний режим, забезпечують подальший супровід до моменту розпізнавання державного реєстраційного знака, потім формують кадр зображення транспортного засобу - порушника з чітко видимим розпізнаним державним реєстраційним знаком, датою, часом, зафіксованою швидкістю та ідентифікатором відеокамери, що дозволяє здійснювати автоматичну реєстрацію порушень правил дорожнього руху. 2. Спосіб за п. 1, який відрізняється тим, що порівняння отриманих незалежно один від одного за допомогою радіолокатора і відеокамери потоків даних, які включають швидкості та координати всіх транспортних засобів, які знаходяться у даний момент на вибраній ділянці дорожнього полотна, здійснюють, наприклад, кореляційним методом. 3. Пристрій для визначення швидкості руху і координат транспортних засобів з подальшою їх ідентифікацією і автоматичною реєстрацією порушень швидкісного режиму, який має радіолокатор, принаймні одну відеокамеру для запису і розпізнавання державних реєстраційних знаків транспортних засобів, які порушують швидкісний режим і блок керування та обробки даних, з'єднаний з ними, який відрізняється тим, що використовують радіолокатор, який містить модуль обробки сигналів, який забезпечує обчислення швидкості і дальності всіх транспортних засобів, які знаходяться на вибраній ділянці дорожнього полотна, при цьому в пристрій введено відеокамеру панорамного огляду, яка сполучена з блоком керування і обробки даних, який оснащений програмним забезпеченням для синхронізації роботи радіолокатора і відеокамери панорамного огляду, порівняння їх потоків даних, отримання метрологічно достовірних результатів швидкостей і координат транспортних засобів, які порушили швидкісний режим та передачі даних для автоматичної реєстрації порушень правил дорожнього руху. 4. Пристрій за п. 3, який відрізняється тим, що функції відеокамери панорамного огляду і функції відеокамери розпізнавання державного реєстраційного знака виконує одна ширококутна мегапіксельна відеокамера. 5. Пристрій за п. 3, який відрізняється тим, що для запису і розпізнавання державного реєстраційного знака використовується декілька звичайних відеокамер відповідно до кількості смуг руху. 6 UA 105418 C2 7 UA 105418 C2 8 UA 105418 C2 Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюСпособ определения скорости движения и координат транспортных средств с последующей их идентификацией и автоматической регистрацией нарушений правил дорожного движения и устройство для его осуществления
Автори англійськоюOsipov, Sergey Konstantinovich, Malinkin, Aleksey Yurievich
Автори російськоюОсипов Сергей Константинович, Малинкин Алексей Юрьевич
МПК / Мітки
МПК: G08G 1/054, G07C 5/00, G08G 1/017
Мітки: реєстрацією, визначення, транспортних, руху, ідентифікацією, правил, дорожнього, швидкості, спосіб, засобів, координат, пристрій, подальшою, реалізації, автоматичною, порушень
Код посилання
<a href="https://ua.patents.su/11-105418-sposib-viznachennya-shvidkosti-rukhu-ta-koordinat-transportnikh-zasobiv-z-podalshoyu-kh-identifikaciehyu-ta-avtomatichnoyu-reehstraciehyu-porushen-pravil-dorozhnogo-rukhu-ta-pristr.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення швидкості руху та координат транспортних засобів з подальшою їх ідентифікацією та автоматичною реєстрацією порушень правил дорожнього руху та пристрій для його реалізації</a>
Спосіб ідентифікації транспортних засобів, що рухаються з перевищенням швидкості
Номер патенту: 88660
Опубліковано: 25.03.2014
Автор: Левтеров Андрій Іванович
МПК: G08G 1/00, G01S 13/00
Мітки: транспортних, швидкості, ідентифікації, рухаються, засобів, спосіб, перевищенням
Формула / Реферат:
Спосіб ідентифікації транспортних засобів, що рухаються з перевищенням швидкості, при якому випромінюють імпульси електромагнітного випромінювання, що в напрямку транспортних засобів, які рухаються по ділянці дорожнього полотна, приймають імпульси відбитого електромагнітного випромінювання, обчислюють дальність і швидкість руху транспортних засобів шляхом порівняння параметрів випромінених і прийнятих імпульсів і порівнюють виміряну...
Спосіб автоматизованого контролю виконання правил дорожнього руху
Номер патенту: 12164
Опубліковано: 16.01.2006
Автори: Бурачек Всеволод Германович, Васильєв Олександр Павлович, Душник Володимир Феліксович, Ущенко Валентин Іванович, Зайцев Сергій Анатолійович
МПК: G08G 1/01
Мітки: руху, автоматизованого, спосіб, дорожнього, виконання, контролю, правил
Формула / Реферат:
Спосіб автоматизованого контролю виконання Правил дорожнього руху, що включає вимірювання швидкості дорожньо-транспортного засобу (ДТЗ), що контролюється, та урахування супутніх факторів фіксування порушень Правил дорожнього руху з застосуванням процесора, який відрізняється тим, що при встановленні факту порушення швидкісного режиму водієм ДТЗ визначають та вводять в пам'ять процесора номер вимірювача швидкості ДТЗ, дату порушення, код...
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди
Номер патенту: 91792
Опубліковано: 25.08.2010
Автори: Сітенко Олександр Миколайович, Грінченко Олена Володимирівна, Лук'янова Ольга Олексіївна, Лук'янов Олександр Михайлович, Дохов Олександр Іванович
МПК: G08G 1/056, G08G 1/052, G01C 21/26
Мітки: автомобіля, контролю, факту, виникнення, пригоди, система, руху, дорожнього, дотримання, правил, визначення, водієм, автоматизованого, дорожньо-транспортної
Формула / Реферат:
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GPS/GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні...
Система для персоніфікації дотримання правил дорожнього руху (пдпдр) транспортним засобом та спосіб її використання
Номер патенту: 99251
Опубліковано: 10.08.2012
Автор: Денисов Олександр Костянтинович
МПК: G08G 1/052, G08G 1/017
Мітки: дотримання, засобом, пдпдр, правил, персоніфікації, дорожнього, система, спосіб, використання, транспортним, руху
Формула / Реферат:
1. Система для персоніфікації дотримання правил дорожнього руху транспортним засобом, яка містить приймально-передавальний радіокомплекс (1) з блоком енергозабезпечення (2) та антенами (3), блоком зчитування (4), блоком контролю інформації (5), дешифратором (6), перетворювачем коду (7), пристроєм керування зчитування, накопичення і аналізу отриманої через радіомітки інформації, а також передачі цієї інформації на інші системи, блоком...
Спосіб визначення швидкості транспортних засобів у момент зіткнення
Номер патенту: 66462
Опубліковано: 17.05.2004
Автор: Огородніков Віталій Антонович
МПК: G01N 33/20, G01N 19/00
Мітки: засобів, швидкості, зіткнення, транспортних, момент, спосіб, визначення
Формула / Реферат:
Спосіб визначення швидкості транспортних засобів у момент зіткнення, який включає визначення енергетичних витрат на переміщення та на деформування і руйнування елементів конструкцій транспортних засобів після зіткнення, визначення лінійних швидкостей відкидання, еквівалентних цим енергетичним витратам, з яких знаходять шукані швидкості, який відрізняється тим, що для визначення енергетичних витрат на деформування і руйнування елементів...
Попередній патент: Спосіб відновлення симетричного температурного профілю в живильнику на виході з вигину і живильник для здійснення цього способу
Наступний патент: Вузол з’єднання аераторів
Випадковий патент: Гідростатичний водопідіймач с.м. срібнюка