Система самозахисту системи автомобільної коробки передач та спосіб керування нею
Формула / Реферат
1. Система самозахисту системи автомобільної коробки передач, яка відрізняється тим, що містить блок керування коробкою передач, систему
керування двигуном, модуль приладової панелі та шину CAN, при цьому:
блок керування коробкою передач являє собою основний блок керування та є використовуваним для здійснення керування коробкою передач і самозахисту коробки передач;
система керування двигуном є використовуваною для здійснення керування крутним моментом на виході згідно з запитом захисту крутного моменту, відправленим блоком керування коробкою передач;
модуль приладової панелі є використовуваним для керування індикаторною лампою коробки передач згідно з запитом індикаторної лампи коробки передач, відправленим блоком керування коробкою передач;
блок керування коробкою передач, система керування двигуном і модуль приладової панелі з'єднані для передачі даних через шину CAN;
при цьому згідно з вхідними сигналами таких систем, як педаль акселератора, педаль гальма, частота обертів проміжного вала, частота обертів ведучого вала, важіль положення передач, тиск ведучого вала та тиск проміжного вала разом зі здійсненням керування гідравлічним тиском в гідроциліндрі ведучого та веденого пасових шківів за допомогою кола керування проміжного вала початкового тиску та кола керування коефіцієнта передачі ведучого вала в коло керування гідравлічної системи, при цьому блок керування коробкою передач використовують для здійснення певної кількості осьових переміщень ведучого та веденого робочих пасових шківів.
2. Система самозахисту системи автомобільної коробки передач за п. 1, яка відрізняється тим, що система автомобільної коробки передач з системою CVT з металевим пасом.
3. Система самозахисту системи автомобільної коробки передач за п. 1 або 2, яка відрізняється тим, що потужність на виході двигуна передається на ведучий робочий пасовий шків системи коробки передач через зубчасту муфту переднього/заднього ходу, яка складається з перетворювача крутного моменту та планетарного механізму, потім вона передається на ведений робочий пасовий шків через клиноподібний металевий пас та потім передається на колеса автомобіля через проміжний редуктор, основну знижувальну передачу та диференціальний механізм, при цьому в процесі роботи коробки передач ведучий та ведений робочі пасові шківи відповідно здійснюють осьове переміщення, змінюючи робочий радіус металевого паса, для зміни коефіцієнта передачі.
4. Спосіб керування, застосований для системи самозахисту системи автомобільної коробки передач за пп. 1-3, який відрізняється тим, що керування самозахистом системи коробки передач в блоці керування коробкою передач передбачає три режими захисту: розрахунок захисту зусилля затиснення ведучого вала, розрахунок захисту зусилля затискання проміжного вала та захист від буксування сталевого паса, при цьому захист підвищується від одного рівня до наступного.
5. Спосіб керування системою самозахисту системи автомобільної коробки передач за п. 4, який відрізняється тим, що режим розрахунку захисту зусилля затиснення ведучого вала являє собою керування захистом бічного зусилля затиснення ведучого пасового шківа, яке реалізують в наступних етапах:
етап 1: розраховують необхідне зусилля затиснення на стороні ведучого пасового шківа за допомогою вхідних сигналів розрахунку крутного моменту на виході та коефіцієнта передачі в системі регулювання крутного моменту двигуна, а також характеристичних параметрів;
етап 2: порівнюють фактичний тиск мастила ведучого вала з необхідним зусиллям затиснення для оцінювання;
етап 3: розраховують тиск мастила додаткового захисту;
етап 4: покращують зусилля затиснення ведучого вала за допомогою збільшення бічного тиску веденого пасового шківа.
6. Спосіб керування системою самозахисту системи автомобільної коробки передач за п. 4 або 5, який відрізняється тим, що режим розрахунку захисту зусилля затиснення проміжного вала являє собою керування захистом бічного зусилля затиснення веденого пасового шківа, яке реалізують в наступних етапах:
етап A: розраховують зусилля затиснення, необхідне на стороні веденого пасового шківа в наступний момент за допомогою розрахунку цільового крутного моменту, розрахунку коефіцієнта передачі, розрахунку захисту зусилля затиснення ведучого вала в системі регулювання крутного моменту двигуна, а також характеристичних параметрів;
етап В: розраховують крутний момент захисту згідно з вхідними сигналами, такими як частота обертів ведучого вала, тиск мастила проміжного вала та частота обертів двигуна, а також характеристичних параметрів, розраховують максимальний допустимий вхідний крутний момент згідно з запитом системи коробки передач на даний момент;
етап С: завершують керування крутним моментом згідно з запитом за допомогою розподілення крутного моменту та крутного моменту на виході системи керування двигуном.
7. Спосіб керування системою самозахисту системи автомобільної коробки передач за п. 4 або 5, який відрізняється тим, що режим захисту від буксування сталевого паса являє собою керування захистом від відмов в роботі пасового шківа коробки передач, яке реалізують в наступних етапах:
етап а: оцінюють ступінь буксування при поточних робочих умовах за допомогою розрахунку коефіцієнта передачі, сигналів крутного моменту згідно запиту коробки передач та крутного моменту двигуна;
етап b: зупиняють передачу потужності або переходять в аварійний режим одночасно із запалюванням індикаторної лампи коробки передач для створення попереднього попередження про несправність.
8. Спосіб керування системою самозахисту системи автомобільної коробки передач за п. 7, який відрізняється тим, що на етапі b через шину CAN блок керування коробкою передач відправляє запит увімкнення індикаторної лампи коробки передач, так що елемент керування сигнальною лампою коробки передач на модулі приладової панелі запалює індикаторну лампу коробки передач для забезпечення попереднього попередження про несправність.
Текст
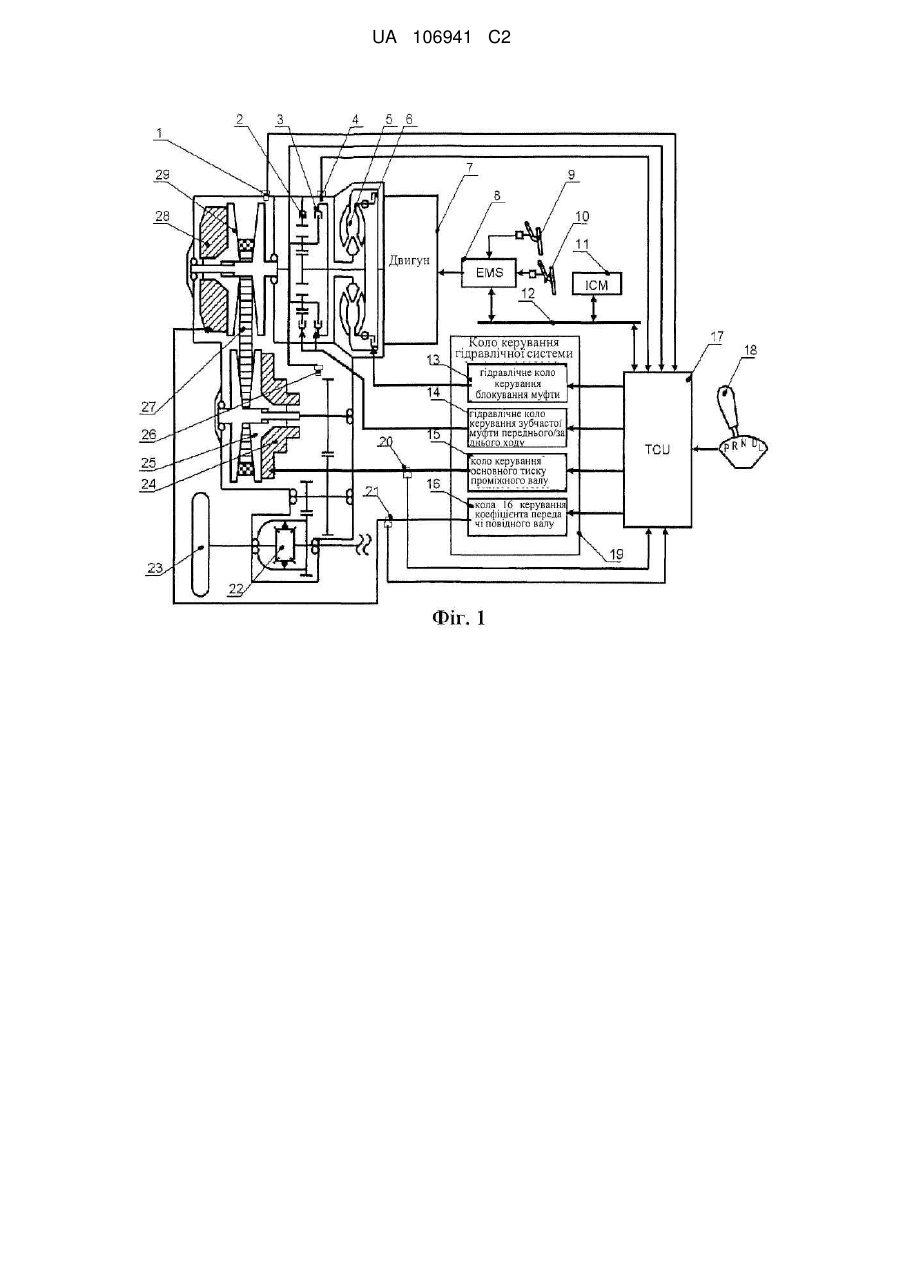
Реферат: Даний винахід належить до системи самозахисту системи автомобільної коробки передач та способу керування нею, містить блок керування коробкою передач (TCU), систему керування двигуном (EMS), модуль приладової панелі (ІСМ) та шину CAN. TCU є основним блоком керування та використовується для здійснення керування коробкою передач та самозахисту на коробці передач. EMS використовують для здійснення керування крутним моментом на виході згідно з запитом захисту крутного моменту, відправленим TCU. ІСМ використовується для керування індикаторною лампою коробки передач згідно з запитом індикаторної лампи коробки передач, відправленим TCU. TCU, EMS та ІСМ з'єднані для передачі даних через шину CAN. Спосіб керування передбачає три режими захисту: розрахунок захисту зусилля затиснення ведучого вала, розрахунок зусилля затиснення проміжного вала та захист від буксування сталевого паса, при цьому захист підвищується від одного рівня до наступного. UA 106941 C2 (12) UA 106941 C2 UA 106941 C2 5 10 15 20 25 30 35 40 45 50 55 60 Галузь техніки Даний винахід відноситься до галузі керування самозахистом для безступінчастої коробки передач (скорочено CVT) та, зокрема, до системи самозахисту автомобільної коробки передач та способу керування нею. Передумови створення винаходу З початку 1990-х рр. у сфері автомобільної промисловості велику увагу приділяють науководослідним роботам у сфері CVT технологій. Зокрема, в технічній галузі проектування мікрокарів CVT розглядають як найважливіша технологія. З швидким розвитком світових технологій в CVT постійно застосовують нові створювані електронні технології та технології керування для автомобілів. CVT з металевим клиновидним пасом представляє собою варіатор з пасовим приводом, призначений для передачі потужності за допомогою сили тертя. Його коефіцієнт передачі регулюється за допомогою автоматичної зміни діаметрів повідного пасового шківа та веденого пасового шківа. Оскільки передатне число можна безступінчасто змінювати від мінімального значення до максимального значення, таким чином досягають ефекту надзвичайно плавної зміни швидкостей. Завдяки розвинутій технології CVT та широкому визнанню на ринку в майбутньому споживачі будуть вимагати більш швидкого та точного керування передатним числом, кількістю обертів, тиском та крутним моментом CVT. Елемент керування CVT та елемент керування електроприводом будуть разом вбудовані в усю силову систему для забезпечення різних режимів водіння, таких як інтенсивний режим, комфортний режим та круїзконтроль, так що користувач зможе отримувати максимальну насолоду від водіння. Крім того, функція керування самозахистом системи CVT повинна перевірятись і відповідати вимогам до випробувань в різних складних та жорстких робочих умовах, гарантуючи, що основна функція керування передачі CVT є надійною та безпечною. Коли система CVT працює в робочих умовах з підвищеним навантаженням або в умовах з раптовими змінами, наприклад в умовах високої температури та нерівної поверхні дороги, внаслідок охолодження та неефективного змащування системи CVT або надмірного протікання гідравлічної системи та заїдання тарілки клапана, тиск робочого мастила системи керування швидкістю може раптово знижуватись, або крутний момент двигуна буде нерегульованим, що може спричинити нетипове перемикання передач та буксування сталевого паса. Такі повторювані несправності можуть призвести до невідновлюваних пошкоджень важливих компонентів, таких як металевий пас та пасовий шків. Такі пошкодження не тільки стануть причиною значних економічних втрат для споживачів, але й вплинуть на безпеку та на маневреність усього автомобіля у процесі керування. Стислий опис винаходу Метою даного винаходу є забезпечення системи самозахисту системи автомобільної коробки передач та спосіб керування нею, використовуваний для запобігання неправильного перемикання передач або буксування сталевого паса системи автомобільної коробки передач у разі виникнення таких робочих умов, як раптове зменшення тиску робочого мастила системи автомобільної коробки передач або нерегульований крутний момент двигуна, з метою забезпечення безпечного та надійного захисту системи CVT та гарантування нормального функціонування CVT з металевим пасом. Система самозахисту системи автомобільної коробки передач та спосіб керування нею відноситься до трьох основних блоків керування, а саме до блоку керування коробкою передач (TCU), системи керування двигуном (EMS) та модуля приладової панелі (ICM), де TCU представляє собою основний блок керування та в основному використовуваний для здійснення функцій безпосередньо коробки передач, в тому числі автомобільної коробки передач та керування самозахистом. EMS використовують для здійснення керування крутним моментом на виході згідно із запитом захисту крутного моменту, відправленим TCU. ICM використовують для керування індикаторною лампою коробки передач згідно із запитом індикаторної лампи коробки передач, відправленим TCU. Завдяки передачі даних від трьох блоків керування в їх відповідному режимі нормального функціонування та роботи програми керування самозахистом системи блока керування TCU коробкою передач, система самозахисту системи автомобільної коробки передач та спосіб керування нею забезпечує систему коробки передач всебічним моніторингом безпеки, захистом у реальному часі та своєчасною сигналізацією з метою захисту системи коробки передач від створення неправильного перемикання передач або буксування сталевого паса. Система самозахисту системи автомобільної коробки передач та спосіб керування нею може повністю застосовуватись у масовому виробництві CVT з металевим пасом. Особливе технічне рішення забезпечується наступним чином. 1 UA 106941 C2 5 10 15 20 25 30 35 40 45 50 55 60 Система самозахисту системи автомобільної коробки передач даного винаходу містить блок керування коробкою передач (TCU), систему керування двигуном (EMS), модуль приладової панелі (ICM) та шину CAN, де: TCU представляє собою основний блок керування та використовуваний для здійснення керування коробкою передач та самозахисту коробки передач. EMS використовують для здійснення керування крутним моментом на виході згідно із запитом захисту крутного моменту, відправленим TCU. ICM використовують для керування індикаторною лампою коробки передач згідно із запитом індикаторної лампи коробки передач, відправленим TCU. TCU, EMS та ICM з'єднані для передачі даних через шину CAN. Більш того, система автомобільної коробки передач представляє собою систему CVT з металевим пасом. Більш того, згідно з вхідними сигналами таких систем як педаль акселератора, педаль гальма, частота обертів проміжного валу, частота обертів повідного валу, важіль положення передач, тиск на повідному валу та тиск на проміжному валу, разом зі здійсненням керування гідравлічним тиском в гідроциліндрі повідного та веденого пасового шківа за допомогою кола керування основним тиском проміжного валу та кола керування коефіцієнтом передачі повідного валу в колі керування гідравлічної системи на блок керування коробкою передач TCU використовують для здійснення певної кількості вісних переміщень повідного та веденого робочих пасових шківів. Більш того, потужність на виході двигуна передається на повідний робочий пасовий шків системи коробки передач через зубчасту муфту переднього/заднього ходу, яка складається з перетворювача крутного моменту та планетарного механізму,потім передається на ведений робочий пасовий шків через клиновидний металевий пас та потім передається на колеса автомобіля через проміжний редуктор, основну знижувальну передачу та диференціальний механізм. При роботі коробки передач повідний та ведений робочі пасові шківи відповідно виконують вісне переміщення, змінюючи робочий радіус металевого паса, таким чином змінюючи коефіцієнт передачі. Також даний винахід забезпечує спосіб керування, застосовуваний для системи самозахисту системи автомобільної коробки передач, при цьому керування самозахистом системи коробки передач у TCU передбачає три режими захисту: розрахунок захисту зусилля затиснення повідного валу, розрахунок захисту зусилля затиснення проміжного валу та захист від буксування сталевого паса, при цьому захист збільшується від одного рівня до наступного. Крім того, режим розрахунку захисту зусилля затиснення повідного валу представляє собою керування захистом бічного зусилля затиснення повідного пасового шківа, яке здійснюється в наступних етапах: етап 1: за допомогою вхідних сигналів розрахунку крутного моменту на виході та коефіцієнта передачі в системі регулювання крутного моменту двигуна, а також характеристичних параметрів розраховують необхідне зусилля затиснення на стороні повідного пасового шківа; етап 2: порівнюють фактичний тиск мастила повідного валу з необхідним зусиллям затиснення для оцінювання; етап 3: розраховують тиск мастила для додаткового захисту; етап 4: покращують зусилля затиснення повідного валу за допомогою підвищення бічного тиску веденого пасового шківа. Крім того, режим розрахунку захисту зусилля затиснення проміжного валу представляє собою керування захистом бічного зусилля затиснення веденого пасового шківа, здійснюване в наступних етапах: етап A: за допомогою розрахунку цільового крутного моменту, розрахунку коефіцієнта передачі, розрахунку захисту зусилля затиснення повідного валу в системі регулювання крутного моменту двигуна, а також характеристичних параметрів розраховують зусилля затиснення, необхідного на стороні веденого пасового шківа в наступний момент; етап B: згідно з вхідними сигналами, такими як частота обертів повідного валу, тиск мастила проміжного валу та оберти двигуна, а також характеристичних параметрів в ході операції розрахунку захисту крутного моменту здійснюється розрахунок максимального допустимого вхідного крутного моменту згідно з запитом системи коробки передач на даний момент; етап C: за допомогою розподілення крутного моменту та крутного моменту на виході системи керування двигуном завершують керування крутним моментом згідно з запитом. Крім того, режим захисту від буксування сталевого паса представляє собою керування захистом від відмов в роботі коробки передач з пасовим шківом, яке реалізується в наступних етапах: 2 UA 106941 C2 5 10 15 20 25 30 35 40 45 50 55 60 етап a: оцінювання ступеня буксування при поточних робочих умовах за допомогою розрахунку коефіцієнта передачі, сигналів крутного моменту згідно з запитом в коробці передач і крутного моменту двигуна; етап b: виконання відключення передачі потужності або переходу в аварійний режим, одночасного запалювання індикаторної лампи коробки передач, створюючи попереднє попередження про несправність. Крім того, на етапі b через шину CAN блок керування коробкою передач TCU відправляє запит увімкнення індикаторної лампи коробки передач, так що елемент керування сигнальної лампи коробки передач на модулі приладової панелі ICM запалює індикаторну лампу коробки передач, створюючи попереднє попередження про несправність. В коробці передач система силової передачі через пасові шківи є основною деталлю. При роботі коробки передач повідний та ведений робочі пасові шківи відповідно здійснюють вісне переміщення, змінюючи робочий радіус металевого паса, таким чином змінюючи коефіцієнт передачі. Величина вісного переміщення пасового шківа здійснюється системою електрогідравлічного керування CVT, яка здійснює керування гідравлічним тиском в гідроциліндрах повідного та веденого пасового шківа згідно з різноманітними вхідними сигналами системи. У зв'язку з цим, моніторинг безпеки, керування самозахистом та точністю тиску мастила в гідроциліндрах повідного та веденого робочих пасових шківів являються основним функціями алгоритму системи коробки передач. Спосіб керування системою самозахисту системи CVT з металевим пасом даного винаходу в основному реалізований за допомогою передачі даних та скоординованої роботи трьох компонентів, а саме: блоку керування коробкою передач TCU, системою керування двигуном EMS та модуля приладової панелі ICM. Керування самозахистом системи коробки передач відповідно до даного винаходу в основному розділене на три режими захисту, а саме: на розрахунок захисту зусилля затиснення повідного валу, розрахунок захисту зусилля затиснення проміжного валу та захист від буксування сталевого паса, при цьому рівень захисту збільшується від одного рівня до наступного. Режим розрахунку захисту зусилля затиснення повідного валу представляє собою керування захистом бічного зусилля затиснення повідного пасового шківа. За допомогою вхідних сигналів, таких як крутний момент двигуна та коефіцієнт передачі, а також характеристичних параметрів здійснюють розрахунок зусилля затиснення, необхідного на стороні повідного пасового шківа, його порівняння з фактичним тиском мастила повідного вала для оцінювання, розрахунок додаткового тиску мастила для захисту та покращення зусилля затиснення повідного валу, збільшуючи основний тиск (бічний тиск веденого пасового шківа). Режим розрахунку захисту зусилля затиснення проміжного валу представляє собою керування захистом бічного зусилля затиснення веденого пасового шківа. За допомогою розрахунку цільового крутного моменту, розрахунку коефіцієнта передачі, результатів розрахунку захисту затиснення проміжного валу, а також характеристичних параметрів здійснюють розрахунок зусилля затиснення, необхідного на стороні веденого пасового шківа в наступний момент; при розрахунку захисту крутного моменту отримують максимальний допустимий вхідний крутний момент згідно з запитом системи коробки передач на даний момент; за допомогою завершення керування крутним моментом згідно з запитом через елемент керування системи регулювання крутного моменту двигуна реалізують захист зусилля затиснення проміжного валу. Режим захисту від буксування сталевого паса представляє собою керування захистом пасового шківа коробки передач від відмов в роботі. Металевий пас є ключовою деталлю для повідного та веденого пасових шківів для передачі крутного моменту. У разі, коли початковий тиск на веденому пасовому шківі системи коробки передач раптово стає занадто низьким або граничне значення крутного моменту стає недієвим, осьове стискальне зусилля на стороні повідного/веденого пасового шківа в системі коробки передач не відповідає передачі поточного крутного моменту за проміжок часу, сталевий пас буде буксувати на повідному/веденому робочому пасовому шківі. У серйозних випадках таке буксування сталевого паса може викликати непоправне пошкодження сталевого паса або сторони пасового шківа, що зрештою призводить до відмови в роботі силової передачі. За допомогою таких сигналів, як розрахунок коефіцієнта передачі, крутний момент коробки передач згідно з запитом та крутний момент двигуна система, захисту від буксування сталевого паса оцінює ступінь буксування при поточних робочих умовах, обумовлює відімкнення передачі потужності або увімкнення аварійного режиму та одночасно запалює індикаторну лампу коробки передач для створення попереднього попередження про несправність, допомагаючи водієві здійснювати обережне керування та своєчасне усунення несправності. 3 UA 106941 C2 5 10 15 20 25 30 35 40 45 50 55 60 Опис супровідних графічних матеріалів На фіг. 1 зображена діаграма принципу дії системи автомобільної коробки передач та електрогідравлічної системи керування згідно з даним винаходом. На фіг. 2 зображена основна схема керування системи самозахисту системи автомобільної коробки передач згідно з даним винаходом. На фіг. 3 зображена блок-схема програмного забезпечення модуля керування системи самозахисту системи автомобільної коробки передач згідно з даним винаходом. Детальний опис переважних варіантів здійснення Даний винахід додатково описаний більш детально згідно з супровідними графічними матеріалами. Представлений один переважний з декількох варіантів здійснення даного винаходу. На фіг. 1 зображена діаграма принципу дії системи автомобільної коробки передач та електрогідравлічної система керування згідно з даним винаходом. Як зображено на фіг. 1, потужність на виході двигуна 7 передається на повідний робочий пасовий шків 29 системи коробки передач через муфту 3 переднього ходу/зубчасту муфту 2 заднього ходу, яка складається з перетворювача 5 крутного моменту та планетарного механізму,потім передається на ведений робочий пасовий шків 25 через клиновидний металевий пас 27, та потім передається на колеса 23 автомобіля через проміжний редуктор, основну знижувальну передачу та диференціальний механізм 22. В коробці передач системи коробки передач з пасовим шківом представляє її основну деталь. В процесі роботи коробки передач повідний робочий пасовий шків 29 та ведений робочий пасовий шків 25 відповідно виконують вісне переміщення, змінюючи робочий радіус металевого паса, тим самим змінюючи коефіцієнт передачі. Згідно з вхідними сигналами таких систем, як педаль 9 акселератора, педаль 10 гальма, частота обертів проміжного валу 26, частота обертів повідного валу 1, важіль 18 положення передач, тиск 21 повідного валу та тиск 20 проміжного валу разом зі здійсненням керування гідравлічним тиском в гідроциліндрі 28 повідного пасового шківа та гідроциліндрі 24 веденого пасового шківа за допомогою кола 15 керування основним тиском проміжного валу та кола 16 керування коефіцієнтом передачі повідного валу в блоці 17 керування коробкою передач та кола 19 керування гідравлічної системи використовують для здійснення певної кількості вісних переміщень повідного та веденого робочих пасових шківів. Комбінація перемикання передач зубчастої муфти переднього/заднього ходу в коробці передач реалізується блоком керування коробкою передач TCU та гідравлічним колом 14 керування зубчастої муфти переднього/заднього ходу за допомогою здійснення керування гідравлічним тиском у муфті 3 переднього ходу/зубчастій муфті 2 заднього ходу згідно з вхідними сигналами, такими як частота 1 обертів повідного валу, частота 4 обертів турбіни та важіль 18 положення передач. Система 8 керування двигуном EMS, блок 17 керування коробкою передач TCU та модуль 11 приладової панелі ICM з'єднані через шину 12 CAN. TCU представляє собою основний блок керування та в основному використовується для здійснення функцій коробки передач, у тому числі плавного керування швидкістю та керування самозахистом. EMS використовується для здійснення керування крутним моментом на виході згідно з запитом захисту крутного моменту, відправленим TCU. Модуль приладової панелі ICM використовується для здійснення керування індикаторної лампи коробки передач згідно з запитом індикаторної лампи коробки передач, відправленим TCU. На фіг. 2 зображена основна схема керування системи самозахисту системи автомобільної коробки передач згідно з даним винаходом; спосіб керування системи самозахисту системи CVT з металевим клиновидним пасом в основному реалізують за допомогою передачі даних та скоординованої роботи трьох компонентів, а саме: блоку керування коробкою передач TCU, системи керування двигуном EMS та модуля приладової панелі ICM. Керування 31 самозахистом системи коробки передач в TCU може бути розділене на три режими захисту, а саме: розрахунок 37 захисту зусилля затиснення повідного валу, розрахунок 38 захисту зусилля затиснення проміжного валу та захист 36 від буксування сталевого паса, при цьому рівень захисту підвищується від одного рівня до наступного. Ці три режими захисту, а також функціональні модулі системи керування двигуном EMS та модуль приладової панелі ICM описані нижче. 1. Режим розрахунку захисту зусилля затиснення повідного валу представляє собою керування захистом бічного зусилля затиснення повідного пасового шківа. За допомогою вхідних сигналів крутного моменту 33 на виході та розрахунку 40 коефіцієнта передачі в системі керування 32 крутним моментом двигуна, а також характеристичних параметрів розраховують необхідне зусилля затиснення на стороні повідного пасового шківа; порівнюють необхідне зусилля затиснення та фактичний тиск мастила повідного валу для оцінювання; розраховують 4 UA 106941 C2 5 10 15 20 25 30 35 40 45 50 55 60 тиск мастила для додаткового захисту; покращують зусилля затиснення повідного валу за допомогою підвищення початкового тиску (бічний тиск веденого пасового шківа). 2. Режим розрахунку захисту зусилля затиснення проміжного валу представляє собою керування захистом бічного зусилля затиснення веденого пасового шківа. За допомогою розрахунку 34 ці крутного моменту, розрахунку коефіцієнта передачі, розрахунку захисту затиснення повідного валу в системі регулювання крутного моменту двигуна, а також характеристичних параметрів розраховують зусилля затиснення, необхідне на стороні веденого пасового шківа в наступний момент; згідно з вхідними сигналами, такими як частота обертів повідного валу, тиск мастила проміжного валу та частота обертів двигуна, а також характеристичними параметрами на етапі розрахунку 39 захисту крутного моменту здійснюють розрахунок максимального допустимого вхідного крутного моменту згідно з запитом системи коробки передач на даний момент; за допомогою розподілення 35 крутного моменту та крутного моменту на виході 33 системи керування двигуном завершують керування крутним моментом згідно з запитом. Необхідно гарантувати, що в системі коробки передач в будь-який момент створюється адекватне зусилля затиснення для здійснення надійної передачі крутного моменту двигуна. 3. Режим захисту від буксування сталевого паса представляє собою керування захистом від відмови в роботі пасового шківа коробки передач. Металевий пас є ключовою деталлю для повідного та веденого пасових шківів для передачі крутного моменту. У випадку, коли початковий тиск у веденому пасовому шківі системи коробки передач раптово стає занадто низьким або граничне значення крутного моменту стає недієвим, осьове стискальне зусилля на стороні повідного/веденого пасового шківа в системі коробки передач не відповідає передачі поточного крутного моменту у заданий проміжок часу, за допомогою таких сигналів, як розрахунок коефіцієнта передачі, крутний момент коробки передач згідно з запитом та крутний момент двигуна, захист від буксування сталевого паса оцінюють рівень небезпеки при поточних робочих умовах та обумовлюють відімкнення передачі необхідної потужності або перехід в аварійний режим. Через шину CAN TCU відправляє запит на увімкнення індикаторної лампи коробки передач, елемент керування індикаторної лампи 41 коробки передач ICM запалює індикаторну лампу коробки передач для створення попереднього попередження про несправність, допомагаючи водієві здійснювати обережне керування та своєчасне усунення несправності. На фіг. 3 зображена блок-схема програмного забезпечення модуля керування системи самозахисту системи автомобільної коробки передач згідно з даним винаходом. Як зображено на фіг. 3, після початку дії програми система спочатку зчитує такі сигнали, як тиск мастила повідного валу, тиск мастила проміжного валу, частота обертів повідного валу, частота обертів проміжного валу та крутний момент двигуна; після розрахунку коефіцієнта передачі CVT програма починає впроваджувати перший режим захисту: розрахунок захисту зусилля затиснення повідного валу – за допомогою судження "зусилля затискання повідного валу занадто низьке?” – визначає, чи перевіряти тиск мастила проміжного валу. Потім програма впроваджує другий режим захисту: розрахунок захисту зусилля затиснення проміжного валу. Згідно з результатом розрахунку захисту крутного моменту виконують судження "зусилля затиснення проміжного валу занадто низьке?” визначають, чи здійснювати граничне значення крутного моменту через двигун. Зрештою, згідно із судженням "сталевий пасок буксує, якщо граничне значення крутного моменту є недієздатним?" програма впроваджує третій режим захисту: захист від буксування сталевого паса – здійснюють усунення несправності для попередження буксування сталевого паса, потім виконують запит індикаторної лампи коробки передач для завершення попереднього попередження про несправність. Спосіб керування системи самозахисту системи автомобільної коробки передач за даним винаходом може не тільки здійснювати моніторинг в режимі реального часу того, чи необхідний тиск у гідроциліндрі повідного/веденого пасового шківа є занадто низьким і чи сталевий пас буксує при особливих робочих умовах, але також здійснює керування захистом зусилля затиснення повідного та проміжного валу та керування захистом від буксування сталевого паса. Цей спосіб керування успішно реалізує функцію самозахисту та моніторингу безпеки системи автомобільної коробки передач, та може повністю застосовуватись для масового виробництва виробів CVT з металевим пасом. Ілюстративний опис даного винаходу представлений з посиланнями на супровідні графічні матеріали. Зрозуміло, що особливе виконання даного винаходу не обмежено зазначеними варіантами здійснення. Усі модифікації, виконані на основі ідеї способу та технічного рішення даного винаходу, або безпосередні застосування даного винаходу в інших випадках без модифікацій знаходяться в межах формули даного винаходу. 5 UA 106941 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 30 35 40 45 50 55 1. Система самозахисту системи автомобільної коробки передач, яка відрізняється тим, що містить блок керування коробкою передач, систему керування двигуном, модуль приладової панелі та шину CAN, при цьому: блок керування коробкою передач являє собою основний блок керування та є використовуваним для здійснення керування коробкою передач і самозахисту коробки передач; система керування двигуном є використовуваною для здійснення керування крутним моментом на виході згідно з запитом захисту крутного моменту, відправленим блоком керування коробкою передач; модуль приладової панелі є використовуваним для керування індикаторною лампою коробки передач згідно з запитом індикаторної лампи коробки передач, відправленим блоком керування коробкою передач; блок керування коробкою передач, система керування двигуном і модуль приладової панелі з'єднані для передачі даних через шину CAN; при цьому згідно з вхідними сигналами таких систем, як педаль акселератора, педаль гальма, частота обертів проміжного вала, частота обертів ведучого вала, важіль положення передач, тиск ведучого вала та тиск проміжного вала разом зі здійсненням керування гідравлічним тиском в гідроциліндрі ведучого та веденого пасових шківів за допомогою кола керування проміжного вала початкового тиску та кола керування коефіцієнта передачі ведучого вала в коло керування гідравлічної системи, при цьому блок керування коробкою передач використовують для здійснення певної кількості осьових переміщень ведучого та веденого робочих пасових шківів. 2. Система самозахисту системи автомобільної коробки передач за п. 1, яка відрізняється тим, що система автомобільної коробки передач з системою CVT з металевим пасом. 3. Система самозахисту системи автомобільної коробки передач за п. 1 або 2, яка відрізняється тим, що потужність на виході двигуна передається на ведучий робочий пасовий шків системи коробки передач через зубчасту муфту переднього/заднього ходу, яка складається з перетворювача крутного моменту та планетарного механізму, потім вона передається на ведений робочий пасовий шків через клиноподібний металевий пас та потім передається на колеса автомобіля через проміжний редуктор, основну знижувальну передачу та диференціальний механізм, при цьому в процесі роботи коробки передач ведучий та ведений робочі пасові шківи відповідно здійснюють осьове переміщення, змінюючи робочий радіус металевого паса, для зміни коефіцієнта передачі. 4. Спосіб керування, застосований для системи самозахисту системи автомобільної коробки передач за пп. 1-3, який відрізняється тим, що керування самозахистом системи коробки передач в блоці керування коробкою передач передбачає три режими захисту: розрахунок захисту зусилля затиснення ведучого вала, розрахунок захисту зусилля затискання проміжного вала та захист від буксування сталевого паса, при цьому захист підвищується від одного рівня до наступного. 5. Спосіб керування системою самозахисту системи автомобільної коробки передач за п. 4, який відрізняється тим, що режим розрахунку захисту зусилля затиснення ведучого вала являє собою керування захистом бічного зусилля затиснення ведучого пасового шківа, яке реалізують в наступних етапах: етап 1: розраховують необхідне зусилля затиснення на стороні ведучого пасового шківа за допомогою вхідних сигналів розрахунку крутного моменту на виході та коефіцієнта передачі в системі регулювання крутного моменту двигуна, а також характеристичних параметрів; етап 2: порівнюють фактичний тиск мастила ведучого вала з необхідним зусиллям затиснення для оцінювання; етап 3: розраховують тиск мастила додаткового захисту; етап 4: покращують зусилля затиснення ведучого вала за допомогою збільшення бічного тиску веденого пасового шківа. 6. Спосіб керування системою самозахисту системи автомобільної коробки передач за п. 4 або 5, який відрізняється тим, що режим розрахунку захисту зусилля затиснення проміжного вала являє собою керування захистом бічного зусилля затиснення веденого пасового шківа, яке реалізують в наступних етапах: етап A: розраховують зусилля затиснення, необхідне на стороні веденого пасового шківа в наступний момент за допомогою розрахунку цільового крутного моменту, розрахунку 6 UA 106941 C2 5 10 15 20 коефіцієнта передачі, розрахунку захисту зусилля затиснення ведучого вала в системі регулювання крутного моменту двигуна, а також характеристичних параметрів; етап В: розраховують крутний момент захисту згідно з вхідними сигналами, такими як частота обертів ведучого вала, тиск мастила проміжного вала та частота обертів двигуна, а також характеристичних параметрів, розраховують максимальний допустимий вхідний крутний момент згідно з запитом системи коробки передач на даний момент; етап С: завершують керування крутним моментом згідно з запитом за допомогою розподілення крутного моменту та крутного моменту на виході системи керування двигуном. 7. Спосіб керування системою самозахисту системи автомобільної коробки передач за п. 4 або 5, який відрізняється тим, що режим захисту від буксування сталевого паса являє собою керування захистом від відмов в роботі пасового шківа коробки передач, яке реалізують в наступних етапах: етап а: оцінюють ступінь буксування при поточних робочих умовах за допомогою розрахунку коефіцієнта передачі, сигналів крутного моменту згідно запиту коробки передач та крутного моменту двигуна; етап b: зупиняють передачу потужності або переходять в аварійний режим одночасно із запалюванням індикаторної лампи коробки передач для створення попереднього попередження про несправність. 8. Спосіб керування системою самозахисту системи автомобільної коробки передач за п. 7, який відрізняється тим, що на етапі b через шину CAN блок керування коробкою передач відправляє запит увімкнення індикаторної лампи коробки передач, так що елемент керування сигнальною лампою коробки передач на модулі приладової панелі запалює індикаторну лампу коробки передач для забезпечення попереднього попередження про несправність. 7 UA 106941 C2 8 UA 106941 C2 Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюSelf-protection system of automotive transmission system and control method thereof
Автори англійськоюNi, Bin
Автори російськоюНи Бинь
МПК / Мітки
МПК: F16H 59/00, F02N 99/00, B60W 10/02, B60W 10/10, F16H 63/00, F16H 61/00, F16H 9/00
Мітки: керування, спосіб, коробки, самозахисту, автомобільної, передач, система, нею, системі
Код посилання
<a href="https://ua.patents.su/11-106941-sistema-samozakhistu-sistemi-avtomobilno-korobki-peredach-ta-sposib-keruvannya-neyu.html" target="_blank" rel="follow" title="База патентів України">Система самозахисту системи автомобільної коробки передач та спосіб керування нею</a>
Спосіб керування поступальним перемиканням передаточного числа коробки передач і коробка передач транспортного засобу для здійснення способу
Номер патенту: 58496
Опубліковано: 15.08.2003
Автор: Антонов Румен
МПК: F16H 61/02
Мітки: передач, коробка, перемиканням, числа, спосіб, способу, транспортного, коробки, поступальним, передаточного, засобу, керування, здійснення
Формула / Реферат:
1. Спосіб керування поступальним переходом від одного передаточного числа до іншого у коробці передач з щонайменше двома передаточними числами, яка має у складі привід (44, 46; А1), що селективно вводить у дію селективний засіб (18, 118) зчеплення у цій коробці передач, у якому після початку операції зміни передаточного числа визначено щонайменше одну фізичну величину, зв'язану з цією операцією, а керування приводом (44, 46; А1) здійснюється...
Механізм включення передач коробки передач транспортного засобу
Номер патенту: 39927
Опубліковано: 16.07.2001
Автори: Колесник Валентин Миколайович, Шейко Микола Федорович, Чурилов Віктор Олексійович, Бондаренко Євген Андрійович
МПК: B60K 20/04
Мітки: транспортного, механізм, передач, засобу, коробки, включення
Формула / Реферат:
Механизм включения передач коробки передач транспортного средства, содержащий расположенные под крышкой коробки передач и соединенные планкой фланцы с установленными в них с возможностью осевого перемещения валиками, расположенное в одном из фланцев фиксирующее устройство валиков, жестко закрепленные на валиках вилки и поводки, отличающийся тем, что фланцы и планка жестко связаны между собой и образуют кронштейн, снабженный съемным монтажным...
Механізм зміни крутного моменту коробки передач мотоцикла
Номер патенту: 24234
Опубліковано: 25.06.2007
Автор: Фомін Валерій Євгенович
МПК: B62M 11/00
Мітки: механізм, моменту, крутного, мотоцикла, коробки, зміни, передач
Формула / Реферат:
1. Механізм зміни крутного моменту коробки передач мотоцикла, що містить паралельно розташовані первинний вал, виконаний разом з вінцем шестірні заднього ходу та вінцями І та II передач, з насадженими на них шестернями III, IV та V передач, вторинний вал з розташованими на ньому, з можливістю вільного обертання, шестернями І-IV передач та напресованими між шестернями І та II передач і шестернями III, IV та V передач трьома шліцьовими муфтами,...
Система управління фрікційними гідромуфтами двохпоточної коробки передач транспортного засобу
Номер патенту: 11824
Опубліковано: 25.12.1996
Автори: Ілющенко Микола Васильович, Каменев Василь Ніонілович
МПК: B60W 10/10
Мітки: передач, фрікційними, система, управління, транспортного, двохпоточної, гідромуфтами, коробки, засобу
Формула / Реферат:
Система управлення фрикционными гидромуфтами двухпоточпой коробки передач транспортного средства, содержащая гидронасос, соединенный через перепускной клапан и гидрораспределители магистралями с силовыми гидроцилиндрами фрикционных гидромуфт коробки передач, обратный клапан, сообщенный через пневмораспределитель с ресивером пневмосистемы, отличающаяся тем, что, с целью обеспечения запуска двигателя путем буксировки транспортного средства...
Гідророзподільник коробки передач транспортного засобу

Номер патенту: 84444
Опубліковано: 27.10.2008
Автори: Кулаков Леонід Никифорович, Трофімченко Олександр Олександрович
МПК: F16H 47/00, B60K 17/00
Мітки: передач, гідророзподільник, транспортного, засобу, коробки
Формула / Реферат:
1. Гідророзподільник коробки передач транспортного засобу, обладнаної встановленими на валу гідропідтискними фрикційними муфтами, що містить корпус із розточенням, який відрізняється тим, що в розточенні з можливістю обертання встановлений маслопровід з поздовжніми каналами, що з'єднані з поздовжніми каналами вала коробки передач, при цьому маслопровід оснащений з'єднувальними трубками, які встановлені своїми кінцями в розточеннях, виконаних...
Попередній патент: Спосіб та система для виробництва заліза прямого відновлення та/або рідкого металу з використанням бурого вугілля
Наступний патент: Широкосмугова рупорна антена
Випадковий патент: Спосіб визначення форми профіля робочої поверхні грунтообробних знарядь