Спосіб діагностики зубів шестерень зубчастих передач
Номер патенту: 114251
Опубліковано: 10.05.2017
Автори: Журавльов Володимир Миколайович, Жеманюк Павло Дмитрович, Папчонков Олександр Вікторович, Єдинович Андрій Борисович, Кравченко Ігор Федорович

Формула / Реферат
1. Спосіб діагностики зубів шестерень зубчастих передач, згідно з яким для шестірні, яку діагностують, попередньо визначають період ![]() обертання вхідного вала, розраховують зубцеву частоту
обертання вхідного вала, розраховують зубцеву частоту ![]() , визначають частоту вибірки аналого-цифрових перетворювачів
, визначають частоту вибірки аналого-цифрових перетворювачів ![]() , де
, де ![]() - період вибірки, а з датчика вібрацій, який встановлюють на корпусі редуктора поблизу до опори вала шестірні, знімають вібраційний акустичний сигнал
- період вибірки, а з датчика вібрацій, який встановлюють на корпусі редуктора поблизу до опори вала шестірні, знімають вібраційний акустичний сигнал ![]() , де
, де ![]() - поточний час, який відрізняється тим, що визначають технічний стан зубів шестірні під експлуатаційним навантаженням, для чого порівнюють екстремальні значення функції лінійної деформації
- поточний час, який відрізняється тим, що визначають технічний стан зубів шестірні під експлуатаційним навантаженням, для чого порівнюють екстремальні значення функції лінійної деформації ![]() кожного із зубів у фазовій області вібраційного акустичного сигналу, обчислені на основі функції приросту повної фази
кожного із зубів у фазовій області вібраційного акустичного сигналу, обчислені на основі функції приросту повної фази ![]() сигналу зубцевої частоти на інтервалі часу, що є кратним періоду
сигналу зубцевої частоти на інтервалі часу, що є кратним періоду ![]() частоти вибірки, із припустимим параметром деформації зубів
частоти вибірки, із припустимим параметром деформації зубів ![]() , визначеним раніше за результатами типових випробувань технічних і експлуатаційних параметрів зубчастої передачі.
, визначеним раніше за результатами типових випробувань технічних і експлуатаційних параметрів зубчастої передачі.
2. Спосіб за п. 1, який відрізняється тим, що для обчислення значень функції лінійної деформації зубів за допомогою генератора синусних та косинусних сигналів формують синусні ![]() й косинусні
й косинусні ![]() сигнали, частоти яких строго дорівнюють розрахованій зубцевій частоті
сигнали, частоти яких строго дорівнюють розрахованій зубцевій частоті ![]() , а фази зсунуті між собою на кут 90°, одночасно, використовуючи генератор частоти вибірки, формують сигнал вибірки
, а фази зсунуті між собою на кут 90°, одночасно, використовуючи генератор частоти вибірки, формують сигнал вибірки ![]() , частота
, частота ![]() якого більше зубцевої частоти
якого більше зубцевої частоти ![]() як мінімум у двадцять разів
як мінімум у двадцять разів![]() , далі, використовуючи аналого-цифрові перетворювачі, вібраційний акустичний сигнал, синусні й косинусні сигнали дискретизують із частотою вибірки, рівномірно квантують, і вибирають аналізований сигнал на інтервалі часу
, далі, використовуючи аналого-цифрові перетворювачі, вібраційний акустичний сигнал, синусні й косинусні сигнали дискретизують із частотою вибірки, рівномірно квантують, і вибирають аналізований сигнал на інтервалі часу ![]() періоду обертання вхідного вала;
періоду обертання вхідного вала;
за тим, використовуючи обчислювальний засіб, дискретизований аналізований сигнал ![]() помножують на дискретизовані сигнали синусних
помножують на дискретизовані сигнали синусних ![]() та косинусних
та косинусних ![]() сигналів, що вибрані на інтервалі часу
сигналів, що вибрані на інтервалі часу ![]() , одержуючи сигнали синусних
, одержуючи сигнали синусних ![]() і косинусних
і косинусних ![]() добутків сигналів, які містять зміни фази сигналу зубцевої частоти
добутків сигналів, які містять зміни фази сигналу зубцевої частоти ![]() , пропорційні до лінійної деформації зубів шестірні, після цього кожний сигнал синусних
, пропорційні до лінійної деформації зубів шестірні, після цього кожний сигнал синусних ![]() та косинусних
та косинусних ![]() добутків сигналів обробляють цифровими фільтрами п'ятого порядку із частотою зрізу, яка дорівнює зубцевій частоті
добутків сигналів обробляють цифровими фільтрами п'ятого порядку із частотою зрізу, яка дорівнює зубцевій частоті ![]() , одержуючи відфільтровані сигнали зубцевої частоти
, одержуючи відфільтровані сигнали зубцевої частоти ![]() й
й ![]() , які мають зсув один до одного на кут 90°, а далі роблять обчислення функції повної фази
, які мають зсув один до одного на кут 90°, а далі роблять обчислення функції повної фази ![]() зубцевої частоти за формулою:
зубцевої частоти за формулою:
 ,
,
де ![]() - величина відфільтрованого сигналу синусного добутку;
- величина відфільтрованого сигналу синусного добутку;
![]() - величина відфільтрованого сигналу косинусного добутку;
- величина відфільтрованого сигналу косинусного добутку;
обчислюють кожний i-й приріст сигналу повної фази ![]() зубцевої частоти на інтервалі часу
зубцевої частоти на інтервалі часу ![]() періоду частоти вибірки:
періоду частоти вибірки:
![]() ,
,
після чого обчислюють значення функції лінійної деформації ![]() зуба на інтервалі часу
зуба на інтервалі часу ![]() на радіусі
на радіусі ![]() ділильної окружності шестірні:
ділильної окружності шестірні:
![]() .
.
3. Спосіб за п. 2, який відрізняється тим, що кількість рівнів квантування вибирають, виходячи з мінімальних лінійних розмірів дефектів, що зароджуються, які визначаються параметром радіуса ![]() ділильної окружності шестірні.
ділильної окружності шестірні.
Текст
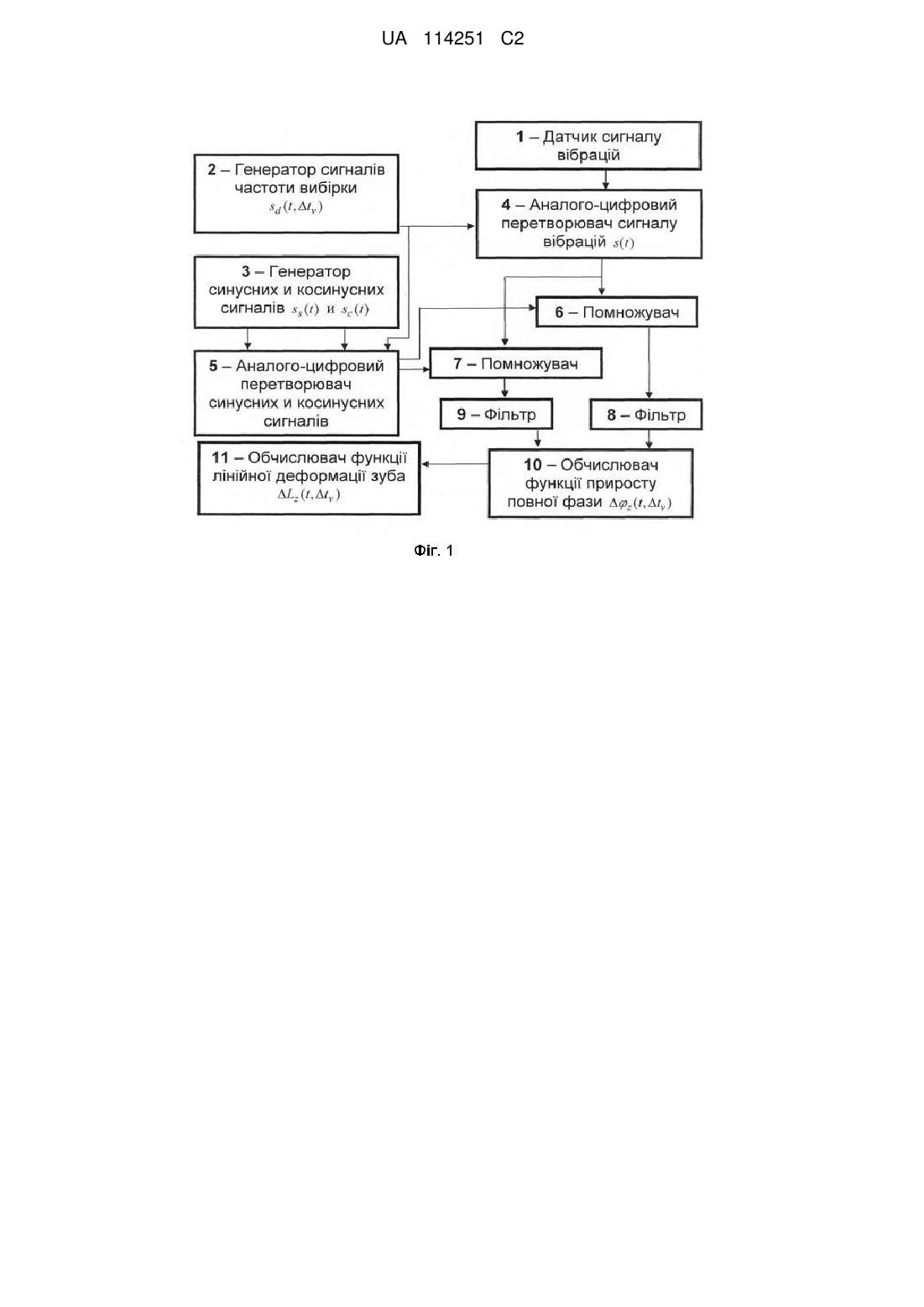
Реферат: Винахід належить до способу вібраційної акустичної діагностики. Може мати широке застосування, зокрема, для діагностики в експлуатаційних умовах дефектів деформації, що зароджуються в зубах шестерень. Технічним результатом винаходу є надійне виділення у вібраційному акустичному сигналі, який знімають з корпусу редуктора двигуна, характеристик відхилень зубів шестерень від штатного стану. Такою характеристикою є обчислені екстремальні значення функції лінійної деформації Lz (t, t v ) кожного із зубів, що є основною відмінною ознакою винаходу. UA 114251 C2 (12) UA 114251 C2 UA 114251 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області діагностики деталей машин, а саме до способу вібраційної акустичної діагностики. Може мати широке застосування, зокрема, для діагностики найбільш напружених вузлів - зубчастих передач редукторів газотурбінних двигунів (ГТД). Ефективним напрямком експлуатаційного технічного діагностування зубчастих передач редукторів ГТД є методи аналізу сигналу вібрацій опор валів зубчастих передач редукторів. Традиційні методи вібраційної діагностики переважно ґрунтуються на аналізі інформаційного сигналу в спектральній області й виконуються шляхом фільтрації або спектрального розкладання з інформаційним аналізом амплітудного спектра перетворення Фур'є або спектральної щільності потужності [1]. Наприклад, відомий спосіб вібраційної діагностики машин [2], який полягає в тому, що здійснюють виділення n періодичних й шумову компоненти вібраційного акустичного сигналу, з подальшою побудовою діагностичного вектора, по напрямку й розміру якого судять про вид і ступінь дефекту, причому шумову компоненту виділяють шляхом послідовного усунення відомих періодичних компонент. Частоти відомих виділених n періодичних компонент, обумовлених по частоті 1-ї гармоніки, що є у кожній компоненті, встановлюють пропорційно частоті опорної періодичної компоненти, які знаходять шляхом пошуку в заданому діапазоні частот, з коефіцієнтами пропорційності, обумовленими конструкцією машини. Визначають відхилення фактичного значення частоти кожної періодичної компоненти від розрахункового значення й також включають його до складу діагностичного вектора. Причому фактичне значення частоти кожної періодичної компоненти визначають як середнє значення фактичних частот, гармонік, що входять у неї, та наведених до першої гармоніки, з виправленням на коефіцієнти корекції, що обумовлені видом функції вікна перетворення Фур'є по відповідних математичних формулах. Недоліком способу є застосування емпіричних коефіцієнтів, які визначаються конкретною реалізацією конструкції машини, що обумовлює низьку точність обробки вібраційних акустичних сигналів шляхом перетворення Фур'є, та має недоліки, обґрунтовані в джерелі [1]. Операції інтегрування, які виконуються при застосуванні методів фільтрації й розкладання в ряд Фур'є, нестаціонарного вібраційного акустичного сигналу на інтервалі тривалості вікна аналізу, визначають, через усереднення сигналу дефекту на інтервалі вікна аналізу, надмірну дисперсію інформаційних параметрів у часовій і частотній областях. Внаслідок цього, історично доведена незадовільна чутливість, щодо задачі діагностування, математичних моделей, які працюють у частотній області, до сигналів дефектів, що зароджуються у зубах, які мають малу амплітуду й велику шпаруватість на часовому інтервалі аналізу. Відоме застосування статистичних методів обробки вібраційного акустичного сигналу для аналізу дефектів зубчастих передач редукторів вертольотів [3]. Ці методи не локалізовані в спектральній області, що визначає їх низьку граничну чутливість до дефектів, що зароджуються, та до внутрішніх перешкод складних систем та механізмів, до яких належать ГТД. Відомий, наприклад, спосіб вібраційної діагностики передач зачепленням [4]. Спосіб полягає в тому, що попередньо фіксують частоту обертання вхідного вала передачі, яку діагностують, розраховують зубцеві частоти, по них настроюють вузькосмужкові фільтри, знімають сигнал з датчика вібрацій, встановленого на корпусі передачі, фільтрують його згаданими вузькосмужковими фільтрами. Отримані діагностичні дані фіксують у пам'яті обчислювального засобу в реальному масштабі часу у вигляді цифрової послідовності. В останній вибирають масиви даних, що відповідають часу повних обертів коліс, які діагностують, на яких потім виділяють ділянки, що відповідають коливанням, які генерують окремі зуби. Після чого, по параметрах коливань оцінюють технічний стан зубчастих коліс та зубів. При цьому знімання даних здійснюють при різних моментах навантаження на вихідному валу передачі. Для кожного зуба визначають середнє значення розмаху коливань вібраційного акустичного сигналу, а як діагностичні параметри використовують їхню зміну при збільшенні моментів навантаження і їхнє відношення до моментів навантаження на вихідному валу передачі. Операція вузькосмужкової фільтрації передбачає осереднення діагностичних даних постійною часу фільтра, що приводить до похибок визначення дефектів, що зароджуються. Операція осереднення, що застосовується в способі, визначає статистичну обробку результатів і має недоліки характерні для статистичних методів. Таким чином, важливим і актуальним завданням сучасного двигунобудування є розробка ефективних методів експлуатаційного діагностування зубчастих передач [5], що дозволяють більш надійно виділити у вібраційному акустичному сигналі опор валів зубчастих передач редукторів двигуна ознаки відхилення характеристик деталей редуктора від штатного стану й доповнити автоматичну систему аналізу технічного стану роторних деталей ГТД п'ятого й шостого поколінь. 1 UA 114251 C2 5 10 15 20 25 30 35 40 Відомий спосіб діагностики зубчастих передач на основі вібраційної діагностики [6], обраний за прототип на підставі подібності основних ознак. Відповідно до способу попередньо визначають частоту обертання вхідного вала передачі, яку діагностують, розраховують зубчасті частоти, по них настроюють вузькосмужкові фільтри, знімають сигнал з датчика вібрацій, установленого на корпусі передачі. Датчик вібраційного акустичного сигналу встановлюють на корпусі обертового підшипника або на поверхні одного з необертових кілець підшипника, що встановлений на валу з шестірнею, яку діагностують. Визначають у заданій смузі частот від 30 до 300 кГц, в рівні послідовні проміжки часу, із частотою вибірки від 50 до 0,1 мкс, значення викиду максимальних амплітуд вібраційних акустичних сигналів, що є послідовними й нерозривними у часі. Визначають час тривалості викиду максимальних послідовних і нерозривних за часом вібраційних акустичних сигналів, та інтервал часу між викидами максимальних нерозривних за часом вібраційних акустичних сигналів, за час не менш одного обороту колеса зубчастої передачі. На підставі встановленого інтервалу часу між викидами максимальних нерозривних за часом вібраційних акустичних сигналів і часу тривалості викиду максимальних вібраційних акустичних сигналів розраховують по наведеним в описі формулам розмір дефекту і його місце розташування. Про технічний стан зубчастої передачі судять шляхом порівняння визначеного діагностикою розміру дефекту із припустимим розміром дефекту, виходячи з технічних та експлуатаційних характеристик зубчастої передачі за час не менш одного обороту колеса. Недоліком відомого способу (прототипу), у зв'язку з роботою його в спектральній області, є неможливість виявлення дефектів, що зароджуються, часові параметри яких сумірні з постійною часу (інтервалу вікна аналізу) фільтрів. Осереднення сигналу дефекту на інтервалі декількох обертів колеса зубчастої передачі й часовий аналіз між викидами максимальних нерозривних за часом сигналів датчику вібрації, в умовах вібраційних і акустичних перешкод працюючого ГТД, який містить деталі, вібраційні й акустичні сигнали яких підсумовуються в часі до сигналів зубів шестерень, визначає граничну чутливість до дефектів, що зароджуються, та незадовільну чутливість до перешкод на інтервалі вікна аналізу. Задачею винаходу є створення способу діагностики зубів шестерень зубчастих передач, за допомогою якого можливо виявляти в експлуатаційних умовах дефекти деформації, що зароджуються в зубах шестерень. Технічним результатом винаходу є надійне виділення у вібраційному акустичному сигналі редуктора двигуна характеристик відхилень зубів шестерень від штатного стану за допомогою автоматичної системи аналізу технічного стану роторних деталей ГТД. Задача вирішується тим, що в способі діагностики зубів шестерень зубчатих передач, згідно з яким, для шестірні, яку діагностують, попередньо визначають період t r обертання вхідного вала, розраховують зубцеву частоту f z , визначають частоту вибірки аналого-цифрових перетворювачів Lmax ( t, t v ) 20 * 10 6 m , де t v - період вибірки, з датчика вібрацій, який z встановлюють на корпусі редуктора поблизу до опори вала шестірні, знімають вібраційний акустичний сигнал s(t ) , де t - поточний час, відповідно до винаходу, технічний стан зубів шестірні під експлуатаційним навантаженням визначають шляхом порівняння екстремальних значень функції лінійної деформації Lz (t, t v ) кожного із зубів у фазовій області вібраційного акустичного сигналу, обчислених на основі функції приросту повної фази z (t, t v ) сигналу зубцевої частоти на інтервалі часу, що є кратним періоду t v частоти вибірки, із припустимим 45 50 55 параметром деформації зубів Lmax ( t, t v ) , який був визначений раніше за результатами z типових випробувань технічних і експлуатаційних параметрів зубчастої передачі. Для визначення обчислених значень функції лінійної деформації зубів виконують наступне. За допомогою генератора синусних і косинусних сигналів формують синусні s s (t ) й косинусні s c (t ) сигнали, частоти яких строго дорівнюють розрахованій зубцевій частоті f z , а фази зсунуті між собою на кут 90°. Водночас, використовуючи генератор частоти вибірки, формують сигнал вибірки sd(t, t v ) , частота fd якого більше зубцевої частоти f z , як мінімум, у двадцять разів f d 20 f z . Така частота забезпечує статистичну точність обчислення функції лінійної деформації в 10 %-ному довірчому інтервалі та визначає точність обчислення функції лінійної деформації для кожного зуба шестірні в просторі часу. Вібраційний акустичний сигнал s(t ) з датчика вібрацій, що містить сигнал sz (t ) s(t ) зубцевої частоти, подають на вхід аналого-цифрового перетворювача сигналу вібрацій. А 2 UA 114251 C2 5 синусні s s (t ) й косинусні s c (t ) сигнали та сигнали частоти вибірки sd(t, t v ) подають на відповідні входи аналого-цифрового перетворювача синусних і косинусних сигналів. Використовуючи аналого-цифрові перетворювачі, вібраційний акустичний сигнал, синусні й косинусні сигнали дискретизують із частотою вибірки, рівномірно квантують і вибирають аналізований сигнал на інтервалі часу t r періоду обертання вхідного вала. Кількість рівнів квантування вибирають виходячи з мінімальних лінійних розмірів дефектів, що зароджуються, та умови забезпечення параметрів надійності конкретної зубчастої передачі. Використовуючи обчислювальний засіб, дискретизований аналізований сигнал s(t, t v ) помножують на дискретизовані сигнали синусних s s ( t, t v ) і косинусних s c (t, t v ) сигналів, 10 вибрані на інтервалі часу t r , одержуючи сигнали синусних s sp ( t, t v ) і косинусних s cp ( t, t v ) добутків сигналів, які містять зміни фази сигналу зубцевої частоти f z , пропорційні лінійній деформації зубів шестірні. Кожний сигнал синусних s sp ( t, t v ) і косинусних s cp ( t, t v ) добутків сигналів обробляють 15 20 цифровими фільтрами п'ятого порядку, із частотою зрізу, що дорівнює зубцевій частоті f z , одержуючи відфільтровані сигнали зубцевої частоти s sf (t, t v ) й s cf (t, t v ) , зсунуті один до одного на кут 90°. Частота зрізу повинна строго дорівнювати зубцевій частоті досліджуваної шестірні, що забезпечує метрологічну точність і виключає погрішності аналізу дефектів, що зароджуються. Далі роблять обчислення функції повної фази z (t, t v ) зубцевої частоти, що визначається як арктангенс відношення відфільтрованого сигналу синусного добутку s sf (t, t v ) до відфільтрованого сигналу косинусного добутку s cf (t, t v ) : s ( t, t v ) z ( t, t v ) arctg sf scf ( t, t v ) , (1) t t v , t v tr де s sf (t, t v ) - величина відфільтрованого сигналу синусного добутку; 25 s cf (t, t v ) - величина відфільтрованого сигналу косинусного добутку; Обчислюють кожний i-ий приріст сигналу повної фази z ( ti, t v ) зубцевої частоти на i інтервалі часу t v періоду частоти вибірки: zi ( ti, t v ) zi ( ti t v ) zi 1 ( ti1), , (2) i 2,3,4... Після чого, значення функції лінійної деформації Lz (t, t v ) зуба на інтервалі часу t r на радіусі rz ділильної окружності шестірні обчислюють за формулою: 30 35 40 45 L z ( t, t v ) rz z ( t, t v ) , (3) t t v , t v t r Переважно для забезпечення максимального відношення інформаційного вібраційного акустичного сигналу до сигналу внутрішніх системних перешкод, датчик вібрацій встановлювати таким чином, щоб вісь чутливості датчика була перпендикулярна до осі вала діагностованої шестірні й перпендикулярна прямій, що з'єднує вісь вала шестірні з зубом шестірні, який діагностують. Основною відмінною ознакою винаходу є параметр функції лінійної деформації L z (t ) кожного із зубів під експлуатаційним навантаженням. Цей параметр фазової області вібраційного акустичного сигналу вібрацій опор валів зубчастих передач редукторів є показником втрати енергії при передачі крутного моменту зубчастою парою. Параметр може бути виділений із загального вібраційного акустичного сигналу шляхом обчислень на основі приросту повної фази z (t, t v ) сигналу зубцевої частоти на інтервалі часу t v періоду обертання вала шестірні. Визначення технічного стану зубів шестірні зубчастої передачі шляхом порівняння екстремальних значень згаданої функції лінійної деформації L z (t ) з раніше визначеними припустимими технічними й експлуатаційними характеристиками зубчастої передачі дає можливість виявляти дефекти, що зароджуються, деформації зубів в експлуатаційних умовах, 3 UA 114251 C2 5 10 незважаючи на їхню незначність у загальному сигналі вібрацій опор валів зубчастих передач редукторів двигуна. Заявлений винахід заснований на розширеному аналізі відомого фізичного процесу передачі крутного моменту в зубчастому зачепленні у фазовій області вібраційного акустичного сигналу переспряження зубів. Аналіз фізичного процесу передачі крутного моменту розглядається з урахуванням максимального контактного навантаження пари зубів і параметрів їхніх поверхонь [7]. Протягом одного циклу переспряження міцність пари зубів, які беруть участь у передачі крутного моменту, змінюється кілька разів. При цьому відбувається згинальна деформація зубів у пружній області з відповідною зміною кроків зачеплення. Це, у свою чергу, може привести до пластичної деформації в зоні двопарного зачеплення. У процесі наростання фронту деформації t ф відбувається зміна повної фази z (t, t v ) зубцевої частоти z ( t ), t t ф , що приводить до 2 зміни кінетичної енергії шестірні E Jr 2 , де J - момент інерції шестірні, та ініціює момент імпульсу M Jr . Останній породжує імпульс вібрації P m v 15 20 25 30 35 40 45 50 з енергією Ev m v 2 2 , де: m - активна маса шестірні, v - усереднена на інтервалі t ф швидкість деформації зуба. Сигнал, пропорційний до енергії переспряження, передається на опору вала й поширюється по корпусних деталях двигуна до датчика вібрацій. У випадку експлуатаційного дефекту зуба, як то тріщини, викрашування, зміни маси (зношування, зміни геометрії поверхні), буде змінюватися функція лінійної деформації зуба L z (t ) та змінення фази зубцевої частоти у фазовому просторі, що впливають на енергію вібрацій E v (t ) . На підставі вищесказаного зроблено висновок, який підтверджений експериментально, що основною функцією, яка характеризує енергетичну ефективність передачі крутного моменту і є чутливою до дефектів, що зароджуються, зубів шестерень, можна вважати зміну повної фази d z ( t ) z , t t z миттєвої зубцевої частоти на інтервалі часу t r одного оберту вала dt шестірні, яка є функцією динамічної кінематичної погрішності [5, с.333] у просторі часу. Таким чином, шуканими параметрами, функції яких у просторі часу під експлуатаційним навантаженням вказують на втрати енергії при передачі крутного моменту зубчастою парою, можна вважати величину лінійної деформації зуба L z (t ) . Запропонований спосіб пояснюється функціональною схемою обробки сигналів, що представлено на зображенні - Фіг. 1. А також графіками, на яких зображені результати аналізу параметра величини лінійної деформації зуба L z (t ) зубчастої пари: Фіг. 2 - аналізований сигнал датчика вібрацій s(t); Фіг. 3 - сигнали синусних s sp ( t, t v ) (верхній) і косинусних s cp ( t, t v ) (нижній) добутків сигналів; Фіг. 4 - відфільтровані сигнали синусного s sf (t, t v ) (верхній) і косинусного s cf (t, t v ) (нижній) добутків сигналів; Фіг. 5 - сигнал приросту повної фази z (t, t v ) зубцевої частоти; Фіг. 6 - функція деформації Lz (t, t v ) для кожного зуба шестірні. Приклад здійснення способу. Адекватність способу перевірялася в процесі аналізу сигналу датчика поперечних горизонтальних вібрацій опори ведучої шестірні заднього редуктора двигуна ТВ3-117ВМАСБМ1, що проходив стендові випробування на підприємстві МОТОР СИЧ. Аналізований сигнал вібрацій s(t ) , що містить сигнал зубцевої частоти s z (t ) (файл z zr 317mp ), інтервалом 1 с, був записаний приблизно в середині режиму двигуна "злітний", тривалість якого 5 хв. Датчик вібрацій 1 (фіг. 1) був установлений на корпусі редуктора таким чином, що вісь чутливості датчика була перпендикулярна до осі вала діагностованої шестірні, та розміщений на відстані порядку 100 мм від ведучої шестірні. Датчик має лінійну фазову характеристику перетворення до частоти 20000 Hz . Далі налаштовували генератор 3 синусних і косинусних сигналів на зубцеву частоту fz 10222,6 Hz , зі зсувом фаз вихідних сигналів на кут 90°. Генератор 2 сигналів частоти вибірки 4 UA 114251 C2 5 10 15 20 25 30 35 40 45 налаштовували на частоту дискретизації fd 216000 Hz (20*10222,6 < 216000), кількість рівнів квантування була вибрана n 216 . Процес дискретизації й квантування сигналу вібрацій здійснювали у аналого-цифровому перетворювачі 4 (фіг. 1), а синусних і косинусних сигналів - у аналого-цифровому перетворювачі 5. Дискретизований у аналого-цифровому перетворювачі 4 аналізований сигнал датчика вібрацій (фіг. 2) помножували (блок 6, 7, фіг. 1) на дискретизовані у аналого-цифровому перетворювачі 5 сигнали генератора синусних і косинусних сигналів, вибрані на інтервалі часу одного оберту вала tr 0,0040093 s , одержуючи сигнали синусних і косинусних добутків сигналів (фіг. 3). Кожний сигнал синусних і косинусних добутків сигналів обробляли цифровими фільтрами 8, 9 (фіг. 1) п'ятого порядку із частотою зрізу за рівнем -3дБ, рівною зубцевій частоті fz 10222,6 Hz діагностованої шестірні, одержуючи відфільтровані сигнали косинусного й синусного добутків сигналів (фіг. 4). За допомогою обчислювального засобу автоматичної системи аналізу технічного стану роторних деталей двигуна вироблялися наступні обчислення: - сигналу (фіг. 5) повної фази зубцевої частоти z (t, t v ) шляхом розрахунку арктангенсу відношення відфільтрованого сигналу синусного добутку до відфільтрованого сигналу косинусного добутку за формулою (1), і приріст (блок 10 на фіг. 1) сигналу повної фази z (t, t v ) зубцевої частоти на інтервалі часу t v за формулою (2); - функції лінійної деформації (блок 11 на фіг. 1) для кожного зуба шестірні (фіг. 6) зубчастої передачі L z (t, t v ) за формулою (3). Екстремальні результати обчислення функції деформації, що вказують на появу дефектів, що зароджуються, деформації зубів діагностованої шестірні, відображені на графіку фіг. 6. Технічний стан зубів шестірні зубчастої передачі визначали шляхом порівняння екстремальних обчислених значень функції деформації під експлуатаційним навантаженням (піки на графіку фіг. 5) із припустимим максимальним параметром деформації, що був раніше визначений і дорівнює Lmax ( t, t v ) 20 * 10 6 m . z Джерела інформації: 1. Журавлёв В.Н. Методическая адекватность спектральной модели в задаче технического диагностирования роторных деталей редукторов ГТД [Текст] / В.Н. Журавлёв, А.В. Папченков, С.А. Борзов // "Вестник двигателестроения" - Запорожье, АО "Мотор Сич", 2014. - № 2. - С. 221228. 2. Патент РФ № 2 322 666, МПК G01N 29/00, G01M 15/00, опубл. 20.04.2008. 3. Harry J. Decker. Crack Detection for Aerospace Quality Spur Gears [Text] /Harry J. Decker U.S. Army Research Laboratory Glenn Research Center, Cleveland, Ohio/National Aeronautics and Space Administration. NASA/TM-2002-211492. Prepared for the International 58th Annual Forum and Technology Display sponsored by the American Helicopter Society.- Montreal, Quebec, Canada, June 11-13, 2002. 4. Патент РФ № 2 224 232, МПК GO ЇМ 13/02, опубл. 20.02.2004. 5. Авиационные зубчатые передачи и редукторы: Справочник [Текст] / Под ред. Э.Б. Булгакова. М: Машиностроение, 1981. - 374 с. 6. Патент РФ № 2 337 340, G01M 13/02, опубл. 27.10.2008. 7. Журавлёв В.Н. Виброкинематометрия зубчатых передач [Текст] / В.Н. Журавлёв, А.В. Папченков, А.Б. Единович, А.В. Корнейчук // Вестник НТУ "ХПИ". Серия: Проблемы механического привода. - Х.:НТУ "ХПИ, 2015. - № 35(1144). - С. 56-60. ФОРМУЛА ВИНАХОДУ 50 1. Спосіб діагностики зубів шестерень зубчастих передач, згідно з яким для шестірні, яку діагностують, попередньо визначають період tr обертання вхідного вала, розраховують зубцеву 55 частоту fz , визначають частоту вибірки аналого-цифрових перетворювачів fd 1 t v , де t v період вибірки, а з датчика вібрацій, який встановлюють на корпусі редуктора поблизу до опори вала шестірні, знімають вібраційний акустичний сигнал s(t ) , де t - поточний час, який відрізняється тим, що визначають технічний стан зубів шестірні під експлуатаційним навантаженням, для чого порівнюють екстремальні значення функції лінійної деформації 5 UA 114251 C2 Lz (t, t v ) кожного із зубів у фазовій області вібраційного акустичного сигналу, обчислені на основі функції приросту повної фази z (t, t v ) сигналу зубцевої частоти на інтервалі часу, що є кратним періоду t v 5 10 15 частоти вибірки, із припустимим параметром деформації зубів Lmax ( t, t v ) , визначеним раніше за результатами типових випробувань технічних і z експлуатаційних параметрів зубчастої передачі. 2. Спосіб за п. 1, який відрізняється тим, що для обчислення значень функції лінійної деформації зубів за допомогою генератора синусних та косинусних сигналів формують синусні ss ( t ) й косинусні sc (t ) сигнали, частоти яких строго дорівнюють розрахованій зубцевій частоті fz , а фази зсунуті між собою на кут 90°, одночасно, використовуючи генератор частоти вибірки, формують сигнал вибірки sd(t, t v ) , частота fd якого більше зубцевої частоти fz як мінімум у двадцять разів fd 20fz , далі, використовуючи аналого-цифрові перетворювачі, вібраційний акустичний сигнал, синусні й косинусні сигнали дискретизують із частотою вибірки, рівномірно квантують, і вибирають аналізований сигнал на інтервалі часу t r періоду обертання вхідного вала; за тим, використовуючи обчислювальний засіб, дискретизований аналізований сигнал s( t, t v ) помножують на дискретизовані сигнали синусних ss (t, t v ) та косинусних sc (t, t v ) сигналів, що вибрані на інтервалі часу t r , одержуючи сигнали синусних ssp( t, t v ) і косинусних scp( t, t v ) добутків сигналів, які містять зміни фази сигналу зубцевої частоти fz , пропорційні до лінійної деформації зубів шестірні, після цього кожний сигнал синусних ssp( t, t v ) та косинусних 20 scp( t, t v ) добутків сигналів обробляють цифровими фільтрами п'ятого порядку із частотою зрізу, яка дорівнює зубцевій частоті fz , одержуючи відфільтровані сигнали зубцевої частоти ssf (t, t v ) й scf (t, t v ) , які мають зсув один до одного на кут 90°, а далі роблять обчислення функції повної фази z (t, t v ) зубцевої частоти за формулою: s ( t, t v ) z ( t, t v ) arctg sf s cf ( t, t v ) , 25 t t v , t v t r де ssf (t, t v ) - величина відфільтрованого сигналу синусного добутку; scf (t, t v ) - величина відфільтрованого сигналу косинусного добутку; обчислюють кожний i-й приріст сигналу повної фази zi ( ti, t v ) зубцевої частоти на інтервалі часу t v періоду частоти вибірки: zi ( ti, t v ) zi ( ti t v ) zi 1 ( ti1), 30 , i 2,3,4... після чого обчислюють значення функції лінійної деформації Lz (t, t v ) зуба на інтервалі часу t r на радіусі rz ділильної окружності шестірні: L z ( t, t v ) rz z ( t, t v ) 35 . t t v , t v tr 3. Спосіб за п. 2, який відрізняється тим, що кількість рівнів квантування вибирають, виходячи з мінімальних лінійних розмірів дефектів, що зароджуються, які визначаються параметром радіуса r z ділильної окружності шестірні. 6 UA 114251 C2 7 UA 114251 C2 8 UA 114251 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01M 13/02
Мітки: діагностики, спосіб, шестерен, зубчастих, передач, зубів
Код посилання
<a href="https://ua.patents.su/11-114251-sposib-diagnostiki-zubiv-shesteren-zubchastikh-peredach.html" target="_blank" rel="follow" title="База патентів України">Спосіб діагностики зубів шестерень зубчастих передач</a>
Спосіб ремонту зубчастих передач
Номер патенту: 66399
Опубліковано: 17.05.2004
Автор: Печений Володимир Іванович
МПК: B23P 6/00
Мітки: спосіб, зубчастих, ремонту, передач
Формула / Реферат:
Спосіб ремонту зубчастих передач, що включає механічну обробку зубчастого колеса і шестірні, який відрізняється тим, що в зубчастому колесі з кожного евольвентного зуба виконують увігнутий зуб кругогвинтового точкового зачеплення, а шестірню виконують зі сполучуваними з профілем зубів зубчастого колеса опуклими зубами кругогвинтового точкового зачеплення, з нової заготовки чи з наплавленої наявної шестірні.
Спосіб визначення модуля зубів евольвентних циліндричних зубчастих коліс
Номер патенту: 78075
Опубліковано: 15.02.2007
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Рубен Робертович, Амбарцумянц Карен Робертович
МПК: F16H 1/00
Мітки: коліс, модуля, зубів, зубчастих, спосіб, евольвентних, циліндричних, визначення
Формула / Реферат:
Спосіб визначення модуля зубів евольвентних циліндричних зубчастих коліс по контактних і згинальних напруженнях, що допускаються, враховуючи також згинальні і контактні напруження, зовнішній крутний момент, модулі пружності першого роду матеріалів коліс, відносну ширину коліс, передатне відношення, який відрізняється тим, що модуль зубів зубчастих коліс визначають по формулі:
Вихідний контур зубів циліндричних передач

Номер патенту: 19624
Опубліковано: 15.12.2006
Автори: Муховатий Олександр Анатолійович, Носко Павло Леонідович, Стрельніков Віктор Микитович, Шишов Валентин Павлович
МПК: F16H 1/16
Мітки: зубів, вихідній, циліндричних, контур, передач
Формула / Реферат:
Вихідний контур зубів циліндричних передач, профіль якого містить прямолінійні і криволінійні ділянки, який відрізняється тим, що геометричні параметри вихідного контуру визначені за умови:,, де - відстань від точки...
Спосіб виготовлення зубчастих передач з неевольвентним зачепленням
Номер патенту: 79091
Опубліковано: 10.04.2013
Автори: Бекленіщев Олег Петрович, Бобух Олексій Іванович, Бобух Іван Олексійович, Кльованик Дар'я Станіславівна, Кльованик Олена Анатоліївна
МПК: B23F 21/00
Мітки: передач, неевольвентним, виготовлення, зачепленням, спосіб, зубчастих
Формула / Реферат:
Спосіб виготовлення зубчастих передач з неевольвентним зачепленням, який полягає у виконанні профільних пазів силових деталей під бочкоподібні ролики інструментом зворотного профілю з подачею його до дотику базових поверхонь, який відрізняються тим, що повздовжній профіль та поперечні розміри бочки роликів обробляють після виготовлення профільних увігнутих пазів силових деталей на станках з числовим програмним управлінням згідно...
Вихідний контур зубів гіперболоїдних передач новікова із двома лініями зачеплення
Номер патенту: 40330
Опубліковано: 10.04.2009
Автори: Медінцева Юлія Вікторівна, Ратов Денис Валентинович, Балицька Тетяна Юріївна, Голубенко Олександр Леонідович
МПК: F16H 1/00
Мітки: передач, лініями, зубів, новікова, двома, контур, вихідній, зачеплення, гіперболоїдних
Формула / Реферат:
1. Вихідний контур зубів гіперболоїдних передач із двома лініями зачеплення, профіль якого містить криволінійні області - дуги окружностей, який відрізняється тим, що геометричні параметри визначені з умови:,
Попередній патент: Спосіб захисту замків від несанкціонованого доступу та захисна накладка для його здійснення
Наступний патент: Швидкохідний плаваючий засіб, який глісує, з демпферною лижею
Випадковий патент: Формувач періодичної послідовності з перенастроюваною тривалістю імпульсів і паузи і програмованою затримкою початку формування відносно стартового імпульсу