Фазовий радіопеленгатор
Номер патенту: 72448
Опубліковано: 27.08.2012
Автори: Мазуренко Олександр Вікторович, Якорнов Євгеній Аркадійович, Гостєв Володимир Володимирович, Карпенко Борис Олексеевич, Авдєєнко Гліб Леонідович
Формула / Реферат
Фазовий радіопеленгатор, що містить лінійну розріджену антенну решітку з чотирьох антен, розташованих в одній площині по прямій лінії з різницею довжин баз (![]() ), рівною
), рівною ![]() , де
, де ![]() - середня довжина хвилі робочого діапазону пеленгатора,
- середня довжина хвилі робочого діапазону пеленгатора, ![]() - задана межа сектора однозначності визначення пеленга, а довжина бази
- задана межа сектора однозначності визначення пеленга, а довжина бази ![]() визначається за умови
визначається за умови ![]() , чотири приймачі, з'єднані по входах з антенами, а по виходах - з чотирма синфазними дільниками потужності, блок демодуляції сигналу, що містить в собі три суматори, три віднімачі і шість амплітудних детекторів, і блок логічної обробки, причому два виходи першого дільника потужності сполучені відповідно з першими входами першого суматора і віднімача, чотири виходи другого дільника потужності сполучені відповідно з другими входами першого суматора і віднімача і з першими входами другого суматора і віднімача, чотири перших виходи третього дільника потужності сполучені зі другими входами другого суматора і віднімача і з першими входами третього суматора і віднімача, перші два виходи четвертого дільника потужності сполучені з другими входами третього суматора і віднімача, виходи кожного з суматорів і віднімачів підключені до входу відповідного амплітудного детектора, а виходи детекторів є виходами блока демодуляції сигналу, який відрізняється тим, що в нього введені квадратурний дільник потужності і п'ятий синфазний дільник потужності на два виходи, три дільники частоти, два фазових детектори і вісім аналого-цифрових перетворювачів, а блок логічної обробки виконаний у вигляді мікропроцесора, причому вхід квадратурного дільника потужності сполучений з п'ятим виходом третього дільника потужності, а його виходи - відповідно зі входами першого і другого дільника частоти, вхід третього дільника частоти сполучений з третім виходом четвертого дільника потужності, а його вихід - зі входом введеного п'ятого синфазного дільника потужності, виходи якого сполучені з першими входами фазових детекторів, вихід першого дільника частоти сполучений з другим входом першого фазового детектора, вихід другого дільника частоти сполучений з другим входом другого фазового детектора, виходи фазових детекторів і виходи всіх шести амплітудних детекторів сполучені відповідно з входами восьми аналого-цифрових перетворювачів, а їхні виходи - з відповідними входами мікропроцесора, вихід якого є виходом радіопеленгатора.
, чотири приймачі, з'єднані по входах з антенами, а по виходах - з чотирма синфазними дільниками потужності, блок демодуляції сигналу, що містить в собі три суматори, три віднімачі і шість амплітудних детекторів, і блок логічної обробки, причому два виходи першого дільника потужності сполучені відповідно з першими входами першого суматора і віднімача, чотири виходи другого дільника потужності сполучені відповідно з другими входами першого суматора і віднімача і з першими входами другого суматора і віднімача, чотири перших виходи третього дільника потужності сполучені зі другими входами другого суматора і віднімача і з першими входами третього суматора і віднімача, перші два виходи четвертого дільника потужності сполучені з другими входами третього суматора і віднімача, виходи кожного з суматорів і віднімачів підключені до входу відповідного амплітудного детектора, а виходи детекторів є виходами блока демодуляції сигналу, який відрізняється тим, що в нього введені квадратурний дільник потужності і п'ятий синфазний дільник потужності на два виходи, три дільники частоти, два фазових детектори і вісім аналого-цифрових перетворювачів, а блок логічної обробки виконаний у вигляді мікропроцесора, причому вхід квадратурного дільника потужності сполучений з п'ятим виходом третього дільника потужності, а його виходи - відповідно зі входами першого і другого дільника частоти, вхід третього дільника частоти сполучений з третім виходом четвертого дільника потужності, а його вихід - зі входом введеного п'ятого синфазного дільника потужності, виходи якого сполучені з першими входами фазових детекторів, вихід першого дільника частоти сполучений з другим входом першого фазового детектора, вихід другого дільника частоти сполучений з другим входом другого фазового детектора, виходи фазових детекторів і виходи всіх шести амплітудних детекторів сполучені відповідно з входами восьми аналого-цифрових перетворювачів, а їхні виходи - з відповідними входами мікропроцесора, вихід якого є виходом радіопеленгатора.
Текст
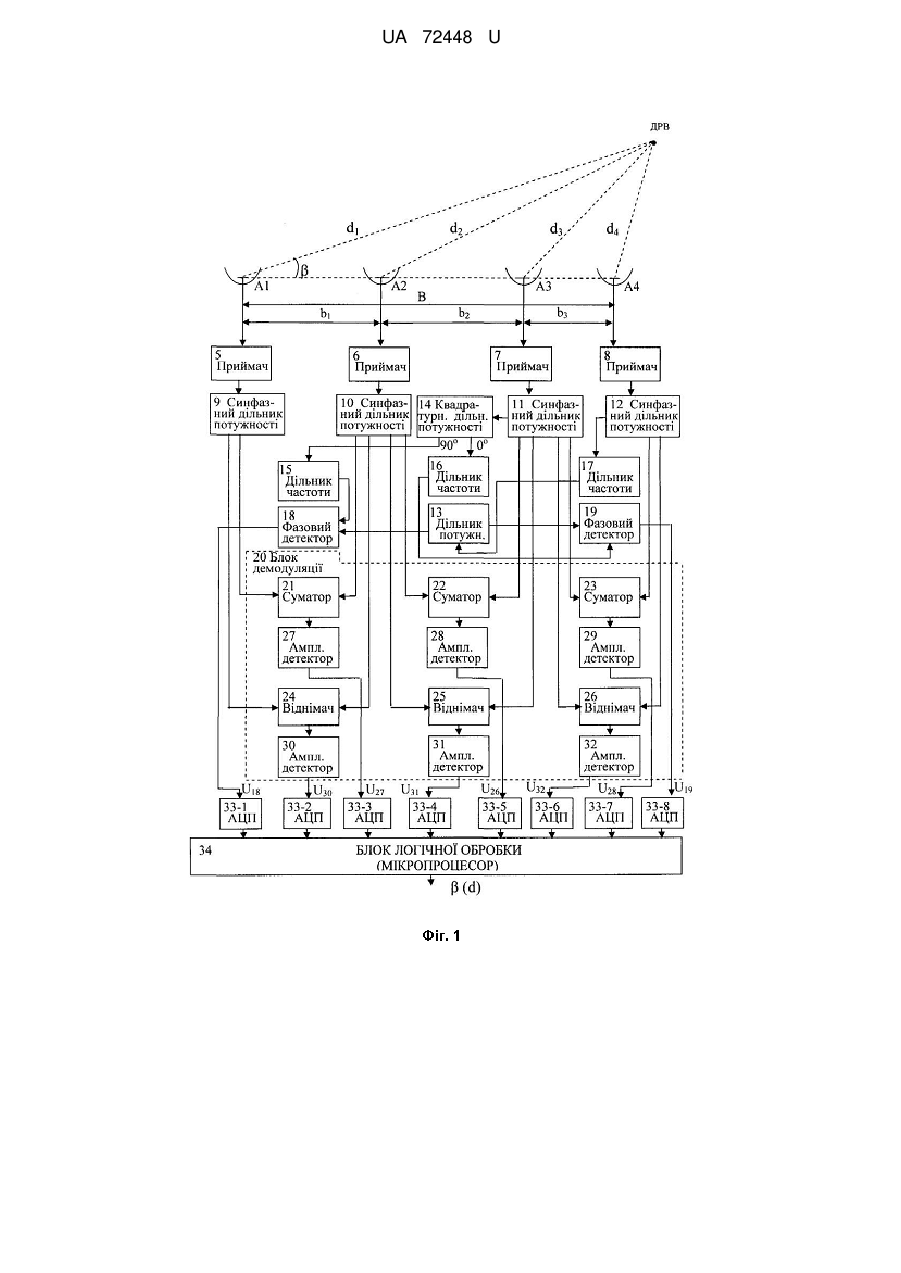
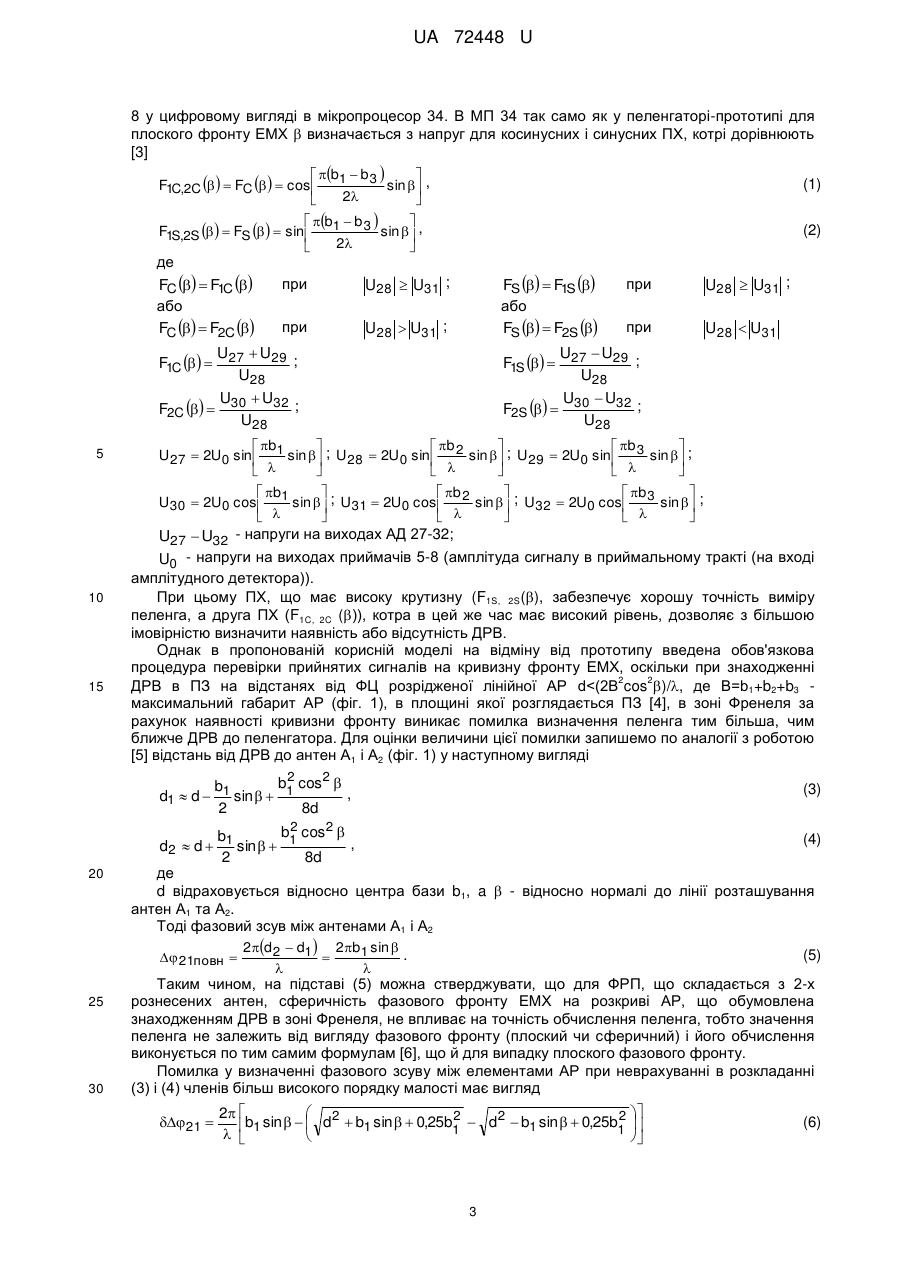
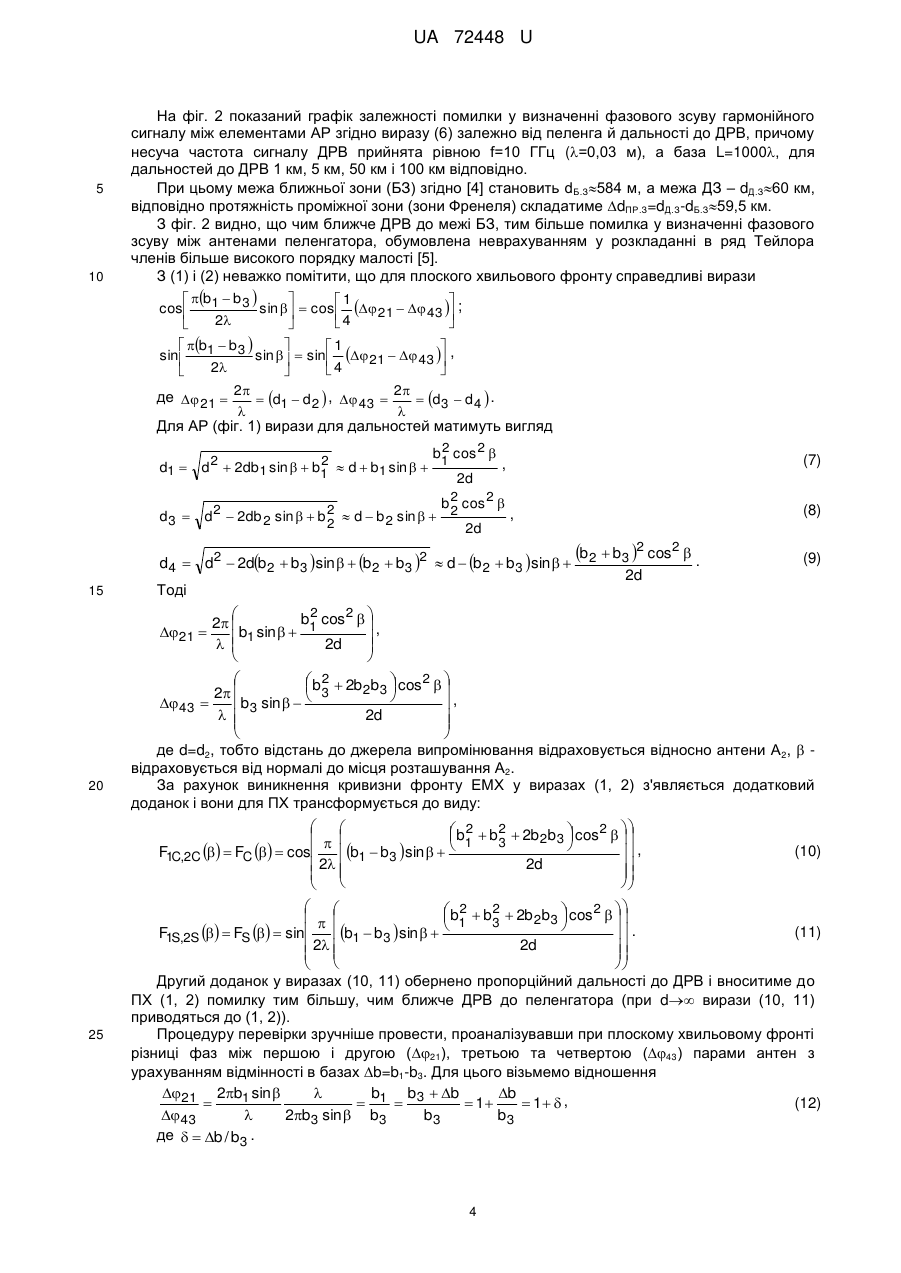
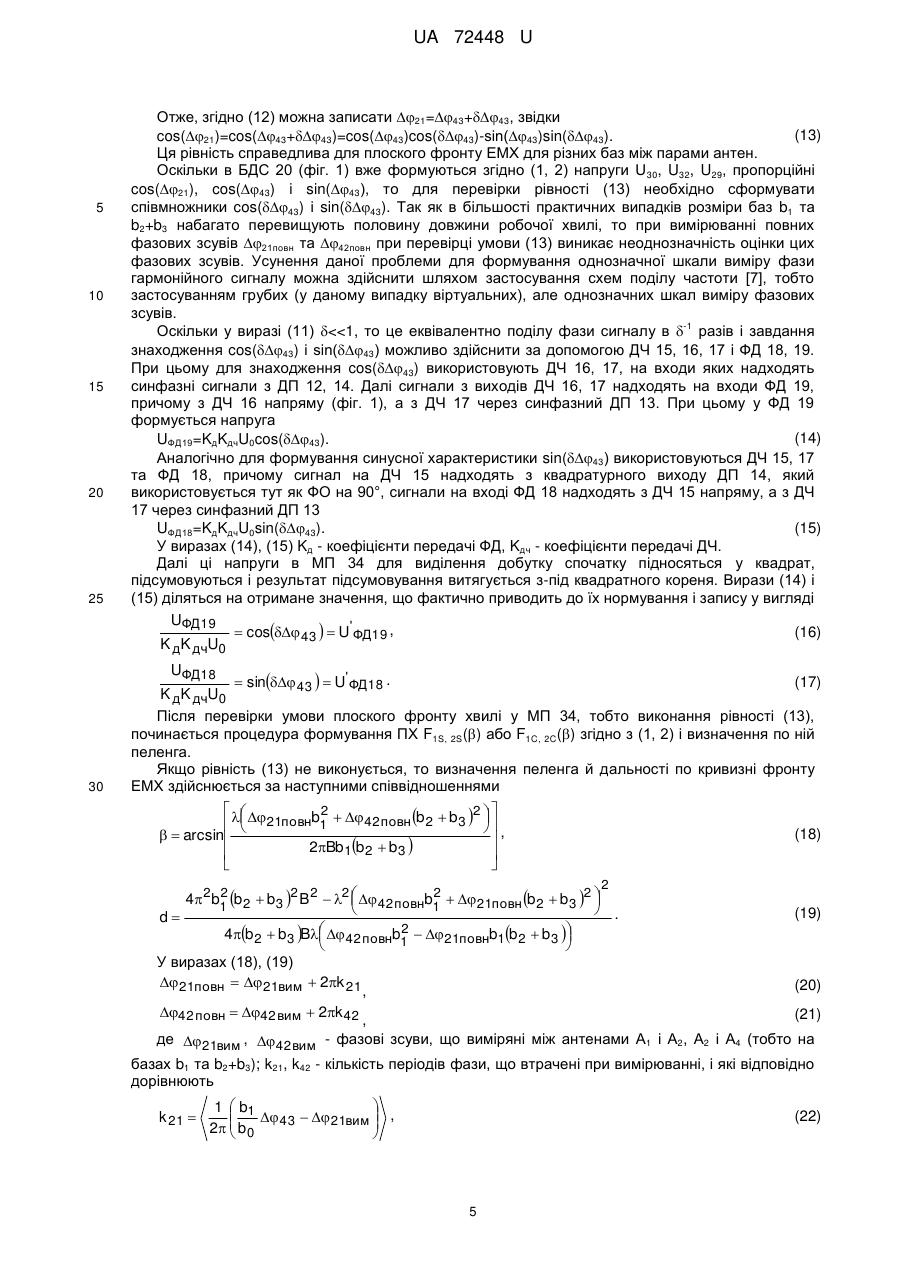
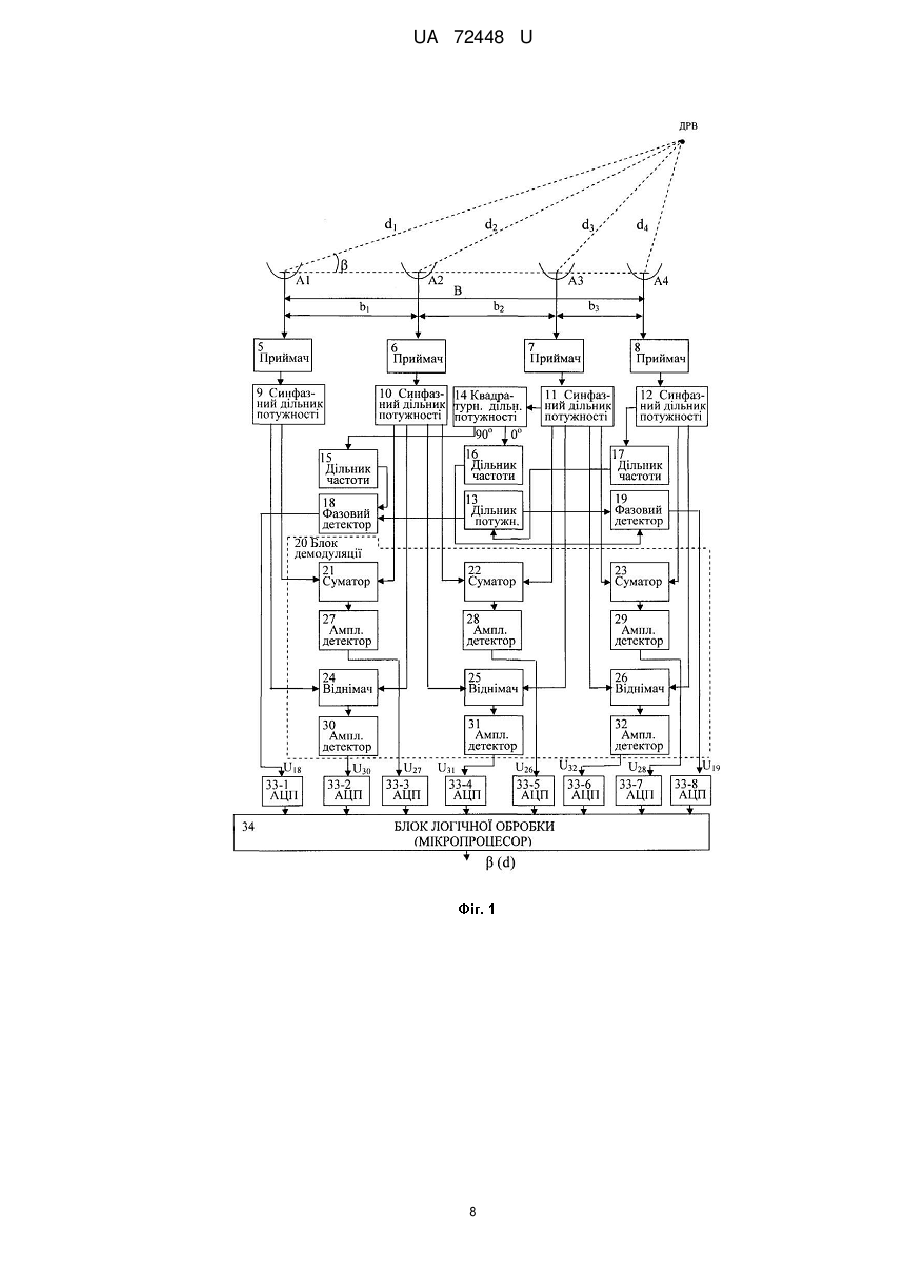
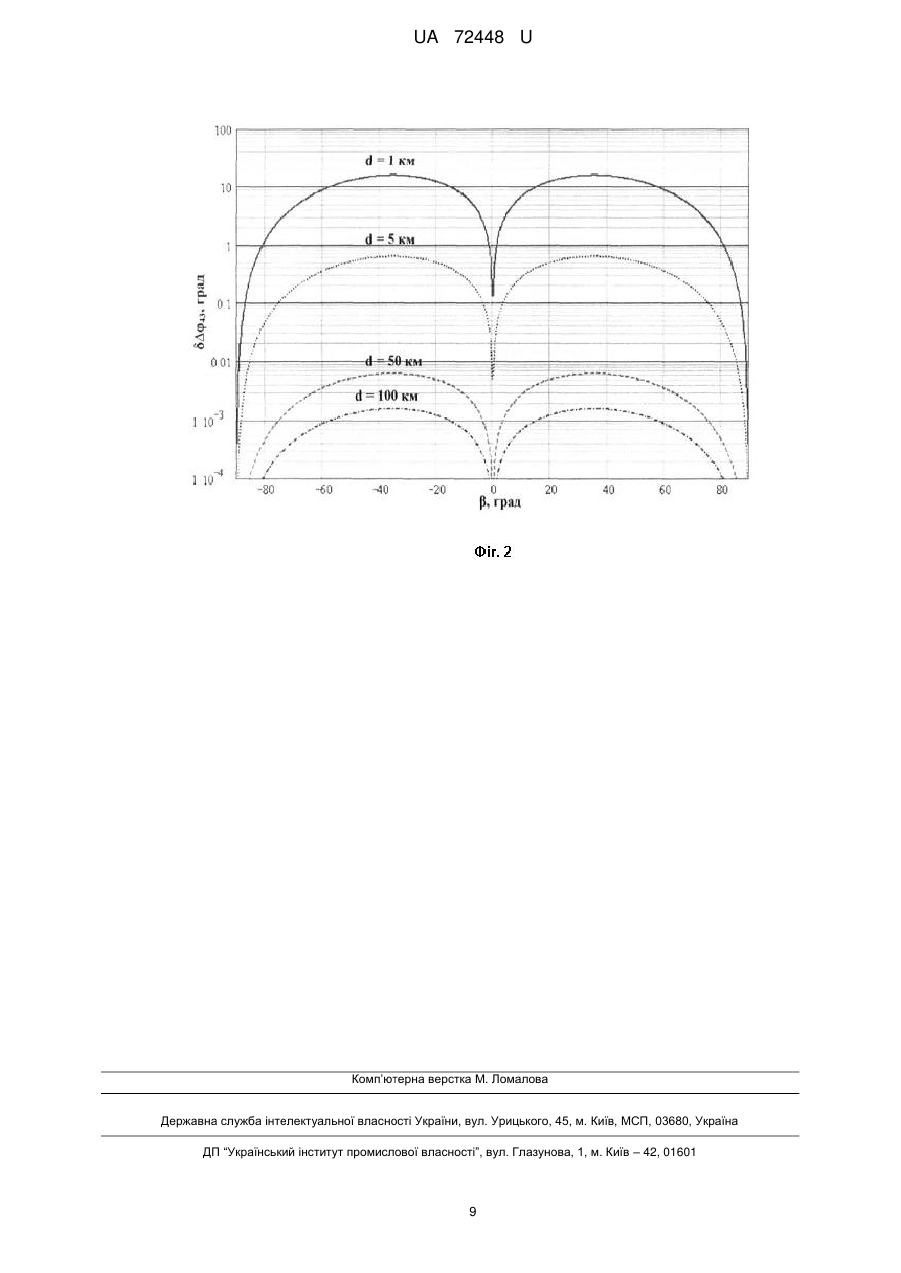
Реферат: Фазовий радіопеленгатор містить лінійну розріджену антенну решітку з чотирьох антен, розташованих в одній площині по прямій лінії, чотири приймачі, блок демодуляції сигналу, що містить в собі три суматори, три віднімачі і шість амплітудних детекторів, і блок логічної обробки. Введені квадратурний дільник потужності і п'ятий синфазний дільник потужності на два виходи, три дільника частоти, два фазових детектори і вісім аналого-цифрових перетворювачів. Блок логічної обробки виконаний у вигляді мікропроцесора. UA 72448 U (54) ФАЗОВИЙ РАДІОПЕЛЕНГАТОР UA 72448 U UA 72448 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до радіотехніки і може бути використана для визначення пеленга джерела безперервного гармонійного радіосигналу. Відомий [1 (с. 300, 301)] фазовий радіопеленгатор (ФРП), що включає лінійні розріджені антенні решітки (АР) з трьох антен, три приймачі і два фазометри, причому кожен з фазометрів виконаний на основі фазового детектора (ФД) і фазообертача (ФО) на 90°. Причому одна з відстаней між фазовими центрами (ФЦ) антен (база) для розширення сектора однозначності пеленга () виконується зменшеною і з розміром бази, що не перевищує половини робочої довжини хвилі (), що забезпечує однозначність виміру фазових зсувів (). Тобто, в пеленгаторі створюються дві шкали: груба, побудована на основі даних, отриманих при використанні однозначної бази, і точна, відповідна протяжнішій неоднозначній базі. У такому варіанті входами відповідного фазометра є перший вхід ФД і вхід ФО, а вихід ФО приєднаний до другого входу ФД. Груба однозначна шкала в розглянутому ФРП виходить завдяки використанню декількох близько розташованих антен і при цьому розмір бази стає порівнянним з . Тому у вказаному пеленгаторі зростає взаємний вплив антен, характеристики яких погіршуються, зокрема, спотворюються діаграми направленості і зменшуються вхідні опори антен. Ці недоліки усунені у фазовому пеленгаторі [2], де при рознесенні антен на відстань, що суттєво перевищує середню робочого діапазону ФРП, область однозначного вимірювання кута приходу плоскої електромагнітної хвилі (ЕМХ) знаходиться у межах - /1-/2 за рахунок використання не довжин баз, а різниці їх довжин. Для цього в ФРП, що має в своєму складі три антени, три ідентичні приймачі, два фазометри, кожний з яких складається з ФД і ФО на 90°, введені два додаткових ФД і блок логічної обробки сигналів (БЛОС). Основними недоліками даного аналога є помилки виміру , що зв'язані з дрейфом характеристик ФО і невизначеність при виявленні джерела радіовипромінювання (ДРВ) через тангенсну пеленгаційну характеристику (ПХ), оскільки через непарність функції тангенсу при знаходженні ДРВ на нульовому рівень ПХ на виході ФРП дорівнює нулеві. Крім того, в пограничній області величина знаменника ПХ наближається до нуля, що веде до виникнення значних помилок вимірювання при додаванні до знаменника навіть малих шумів. Вказані недоліки усунені у винаході [3] за рахунок введення додаткового четвертого антенно-приймального каналу і формування в БЛОС замість тангенсної ПХ синусної і косинусної характеристик. Однак, при збільшенні розмірів баз в [2, 3] зростають помилки вимірювання , оскільки при певних співвідношеннях між базою, і дальністю (d) до ДРВ фронт ЕМХ неможна вважати локально плоским і необхідно враховувати його кривизну (сферичність). Найбільш близьким по технічній суті до запропонованого ФРП є винахід [3]. Відомий ФРП, обраний в якості прототипу, містить АР з чотирьох антен, розташованих в одній плоскості по прямій лінії на базах b1, b2, b3, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, і з різницею довжин баз (b1-b3), що дорівнює b , де 0 2 sin 0 задана межа сектора однозначності визначення пеленга, а довжина бази b2 визначається за b b3 умови b 2 1 , чотири приймачі, з'єднаних по входах з антенами, а по виходах - з блоком 2 демодуляції сигналу (БДС), що містить в собі три суматори, три віднімачі і шість амплітудних детекторів (АД), і БЛОС, причому виходи першого і четвертого приймачів сполучені відповідно через перший і четвертий синфазні дільники потужності з першими входами першого і третього суматорів і віднімачів, вихід другого приймача сполучений з другими входами першого суматора і віднімача і з першими входами другого суматора і віднімача, вихід третього приймача через третій синфазний дільник сполучений зі другими входами другого суматора і віднімача і з другими входами третього суматора і віднімача, вихід кожного з суматорів і віднімачів підключено до входу відповідного АД, а виходи детекторів є виходами БДС. Основним недоліком прототипу є помилки вимірювання пеленга, пов'язані з неурахуванням кривизни фронту ЕМХ при перебуванні ДРВ в проміжній зоні (ПЗ) (зоні Френеля). Задачею, на вирішення якої спрямована корисна модель, є підвищення точності визначення пеленга при наявності кривизни фронту ЕМХ, а також вимірювання по кривизні фронту дальності до ДРВ для ПЗ. Поставлена задача вирішується тим, що в ФРП, що містить АР з чотирьох антен, розташованих в одній площині по прямій лінії на базах, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, і з різницею довжин баз (b1-b3), що дорівнює 1 UA 72448 U b b3 , а довжина бази b2 визначається з умови b 2 1 , чотири приймачі, з'єднані 2 2 sin 0 по входах з антенами, а по виходах - з чотирма синфазними дільниками потужності, БДС, що містить в собі три суматори, три віднімачі і шість амплітудних детекторів, і БЛОС, причому два виходи першого ДП сполучені відповідно з першими входами першого суматора і віднімача, чотири виходи другого ДП сполучені відповідно з другими входами першого суматора і віднімача і з першими входами другого суматора і віднімача, чотири перших виходи третього ДП сполучені з другими входами другого суматора і віднімача і з першими входами третього суматора і віднімача, перші два виходи четвертого дільника потужності сполучені з другими входами третього суматора і віднімача, виходи кожного з суматорів і віднімачів підключені до входу відповідного амплітудного детектора, а виходи детекторів є виходами БДС, в нього введені: квадратурний ДП і п'ятий синфазний ДП на два виходи, три дільники частоти (ДЧ), два ФД і вісім аналого-цифрових перетворювачів (АЦП), а БЛОС виконаний у вигляді мікропроцесора (МП), причому вхід квадратурного ДП сполучений з п'ятим виходом третього ДП, а його виходи - відповідно зі входами першого і другого ДЧ, вхід третього ДЧ сполучений з третім виходом четвертого ДП, а його вихід - зі входом введеного п'ятого синфазного ДП, виходи якого сполучені з першими входами ФД, вихід першого ДЧ сполучений з другим входом першого ФД, вихід другого ДЧ сполучений з другим входом другого ФД, виходи ФД і виходи всіх шести АД сполучені відповідно з входами восьми АЦП, а їхні виходи - з відповідними входами МП, вихід якого є виходом ФРП. Порівняльний аналіз з прототипом показує, що запропонований фазовий радіопеленгатор відрізняється наявністю нових блоків і нових зв'язків. У зв'язку з цим запропонований ФРП відповідає критерію корисної моделі "новизна". На фіг. 1 наведена структурна схема ФРП, а на фіг. 2 - графік залежності помилки у визначенні фазового зсуву гармонійного сигналу між елементами АР залежно від пеленга й дальності до ДРВ. Підвищення точності визначення і вимірювання d до ДРВ для сферичного фронту ЕМХ в заявленому ФРП забезпечується за рахунок введення процедури ділення частоти з метою створення однозначних віртуальних баз (шкал) при визначенні і зміни алгоритму обробки прийнятих пеленгатором сигналів в МП. Фазовий радіопеленгатор (фіг. 1) містить: АР з чотирьох антен А 1, А2, А3, А4, установлених на одній лінії, перпендикулярній осям симетрії їх характеристик направленості, і на базах b 1, b2 і b3 з різницею довжин баз (b1-b3), що дорівнює b , а довжина бази b2 визначається з 2 sin 0 b 5 10 15 20 25 30 35 40 45 50 55 b b3 умови b 2 1 ; чотири ідентичних приймачі 5-8, причому коефіцієнт підсилення приймача 6 2 повинен бути у два рази більший, приймача 7 у 2,5 рази, а приймача 8 у 1,5 рази аніж у приймача 5; п'ять синфазних ДП 9-13 з коефіцієнтами ділення два для 9 і 13 ДП, чотири для 10 ДП, п'ять для 11 ДП і три для 12 ДП; квадратичний ДП 14 на два виходи; три ДЧ 15-17; два ФД 18, 19; БДС 20, що містить три високочастотні суматори 21-23, три високочастотні віднімачі 2426 і шість АД 27-32; вісім АЦП 33.1-33.8 і МП 34. Причому виходи антен А1, А2, А3 і А4 підключені до входів відповідних приймачів 5-8, виходи яких сполучені з синфазними ДП 9-12, два виходи ДП 9 сполучені відповідно з першими входами першого суматора 21 і віднiмача 24, чотири виходи ДП 10 сполучені відповідно з другими входами першого суматора 21 і віднімача 24 і з першими входами другого суматора 22 і віднімача 25, чотири перших виходи ДП 11 сполучені з другими входами другого суматора 22 і віднімача 25 і з першими входами третього суматора 23 і віднімача 26, перші два виходи ДП 12 сполучені з другими входами третього суматора 23 і віднімача 26, виходи кожного з суматорів і віднімачів підключені до входу відповідного АД 27-32, виходи детекторів 27-32 є виходами БДС; вхід квадратурного ДП 14 сполучений з п'ятим виходом ДП 11, а його виходи - відповідно зі входами ДЧ 15, 16; вхід ДЧ 17 сполучений з третім виходом ДП 12, а його вихід - зі входом введеного п'ятого синфазного ДП 13, виходи якого сполучені з першими входами ФД 18, 19, вихід ДЧ 15 сполучений з другим входом ФД 18, вихід ДЧ 16 сполучений з другим входом ФД 19, виходи ФД 18, 19 і виходи всіх шести АД 27-32 сполучені відповідно зі входами восьми АЦП 331-33-8, а їх виходи - з відповідними входами МП 34, вихід якого є виходом ФРП. Радіопеленгатор працює таким чином. При впливі фронту ЕМХ на виходах антен 1-4 (фіг. 1) утворюються сигнали, котрі підсилюються приймачами 5-9, проходять через ДП 10-14, перетворюються за допомогою БДС 20, ДЧ 15-17 і ФД 18, 19 в напруги, що несуть інформацію про на ДРВ, а також d при наявності кривизни фронту ЕМХ і потрапляють після АЦП 33-1 - 33 2 UA 72448 U 8 у цифровому вигляді в мікропроцесор 34. В МП 34 так само як у пеленгаторі-прототипі для плоского фронту ЕМХ визначається з напруг для косинусних і синусних ПХ, котрі дорівнюють [3] b b 3 F1C,2C FC cos 1 sin , 2 b b 3 F1S,2S FS sin 1 sin , 2 де при FC F1C U28 U31 ; або при U28 U31 ; FC F2C (1) (2) FS F1S або FS F2S при U28 U31 ; при U28 U31 F1C 10 15 F1S U27 U29 ; U28 F2C 5 U27 U29 ; U28 U30 U32 ; U28 F2S U30 U32 ; U28 b b b U27 2U0 sin 1 sin ; U28 2U0 sin 2 sin ; U29 2U0 sin 3 sin ; b b b U30 2U0 cos 1 sin ; U31 2U0 cos 2 sin ; U32 2U0 cos 3 sin ; U27 U32 - напруги на виходах АД 27-32; U0 - напруги на виходах приймачів 5-8 (амплітуда сигналу в приймальному тракті (на вході амплітудного детектора)). При цьому ПХ, що має високу крутизну (F1S, 2S(), забезпечує хорошу точність виміру пеленга, а друга ПХ (F1C, 2C ()), котра в цей же час має високий рівень, дозволяє з більшою імовірністю визначити наявність або відсутність ДРВ. Однак в пропонованій корисній моделі на відміну від прототипу введена обов'язкова процедура перевірки прийнятих сигналів на кривизну фронту ЕМХ, оскільки при знаходженні 2 2 ДРВ в ПЗ на відстанях від ФЦ розрідженої лінійної АР d
ДивитисяДодаткова інформація
Назва патенту англійськоюPhase radio direction finder
Автори англійськоюAvdeenko Hlib Leonidovych, Hostev Volodymyr Volodymyrovych, Karpenko Borys Oleksiiovych, Mazurenko Oleksandr Viktorovych, Yakornov Yevhenii Arkadiiovych
Назва патенту російськоюФазовый радиопеленгатор
Автори російськоюАвдеенко Глеб Леонидович, Гостев Владимир Владимирович, Карпенко Борис Алексеевич, Мазуренко Александр Викторович, Якорнов Евгений Аркадиевич
МПК / Мітки
Мітки: радіопеленгатор, фазовий
Код посилання
<a href="https://ua.patents.su/11-72448-fazovijj-radiopelengator.html" target="_blank" rel="follow" title="База патентів України">Фазовий радіопеленгатор</a>
Фазовий радіопеленгатор
Номер патенту: 56430
Опубліковано: 10.01.2011
Автори: Авдєєнко Гліб Леонідович, Карпенко Борис Олексійович, Ліпчевська Ірина Леонідівна, Сторубльов Олександр Іванович, Якорнов Євгеній Аркадійович
Мітки: фазовий, радіопеленгатор
Формула / Реферат:
Фазовий радіопеленгатор, що містить: три антени, розташовані в одній площині по прямій лінії на відстанях (базах), мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, і з різницею довжин баз між ними, рівною , де - середня довжина хвилі робочого діапазону пеленгатора,
Фазовий радіопеленгатор
Номер патенту: 57200
Опубліковано: 10.02.2011
Автори: Ліпчевська Інна Леонідівна, Ільченко Михайло Юхимович, Коломицев Максим Олександрович, Якорнов Євгеній Аркадійович, Авдєєнко Гліб Леонідович
МПК: G01S 3/00
Мітки: фазовий, радіопеленгатор
Формула / Реферат:
Фазовий радіопеленгатор що містить: три антени, розміщені в одній площині по прямій лінії на неоднозначних базах, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, та з різницею довжин баз між ними, рівною , де λ середня довжина хвилі робочого діапазону пеленгатора, α0 - задана границя сектора однозначності визначення пеленга; три...
Широкосмуговий фазовий радіопеленгатор
Номер патенту: 64705
Опубліковано: 10.11.2011
Автори: Охріменко Ярослав Юрійович, Ліпчевська Інна Леонідівна, Авдєєнко Гліб Леонідович, Якорнов Євгеній Аркадійович, Ільченко Михайло Юхимович
МПК: G01S 3/00
Мітки: фазовий, широкосмуговий, радіопеленгатор
Формула / Реферат:
Широкосмуговий фазовий радіопеленгатор, що містить три антени, які розміщені в одній площині по прямій лінії на неоднозначних базах, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен та з різницею довжин баз між ними, рівною , де - середня довжина хвилі робочого діапазону...
Фазовий радіопеленгатор
Номер патенту: 67323
Опубліковано: 10.02.2012
Автори: Ільченко Михайло Юхимович, Авдєєнко Гліб Леонідович, Буділовський Олександр Вікторович, Ліпчевськая Інна Леонідівна, Якорнов Євгеній Аркадійович
МПК: G01S 3/48
Мітки: фазовий, радіопеленгатор
Формула / Реферат:
Фазовий радіопеленгатор, що містить чотири антени, розташовані в одній площині по прямій лінії з різницею довжин баз , що дорівнює , де - середня довжина хвилі робочого діапазону пеленгатора,
Перетворювач змін частоти сигналу у фазовий зсув
Номер патенту: 36610
Опубліковано: 16.04.2001
Автор: Рапін Володимир Васильович
МПК: H03L 7/00
Мітки: зсув, перетворювач, сигналу, частоти, змін, фазовий
Текст:
...до входу др угого підсилювача з автоматичним регулюванням підсилення 7, вихід цього підсилювача з'єднаний з другими входами блоків формування сигналу синхронізації 2, 3, 4 (n+1 блок). Структурна схема блоку формування сигналу синхронізації містить послідовно з'єднані суматор 8 і підсилювач з автоматичним регулюванням підсилення 9, причому перший та другий входи суматора 8 є також першим та другим входами блоку формування сигналу...
Попередній патент: Спосіб лікування поверхневих захворювань маззю
Наступний патент: Індикатор магнітного поля
Випадковий патент: Спосіб збудження сейсмічних хвиль в рідинному середовищі