Зрівноважений силовий аксоїдний механізм та аксоїдний прес
Номер патенту: 86016
Опубліковано: 25.03.2009
Автори: Кім Флорід Борісовіч, Смаригін Ігорь Владіміровіч, Дон Євгеній Алєксєєвіч
Формула / Реферат
1. Зрівноважений силовий аксоїдний механізм, що включає в себе силові аксоїдні механізми, які мають кінцеві елементи, виконані з можливістю поступального переміщення, і проміжні елементи, оснащені опорними поверхнями, виконаними й розташованими так, що при переміщенні одного з кінцевих елементів забезпечується взаємне котіння опорних поверхонь без проковзування з передаванням руху і зусилля іншому кінцевому елементу, який відрізняється тим, що є системою силових ланок, кожна з яких включає в себе хоч би один силовий аксоїдний механізм, при цьому всі кінцеві елементи об'єднані у ведучі, ведені полікінцеві елементи, які об'єднують силові ланки принаймні в один силовий контур, що зрівноважує їхні зусилля.
2. Зрівноважений силовий аксоїдний механізм за п. 1, який відрізняється тим, що включає в себе принаймні один опорний полікінцевий елемент, всередині якого розміщені ведучі, ведені, а при необхідності проміжні полікінцеві елементи, що замикають силові ланки в один і більше силових контурів, що зрівноважують їхні зусилля.
3. Зрівноважений силовий аксоїдний механізм за п. 1 і п. 2, який відрізняється тим, що виконаний симетричним відносно принаймні однієї площини з можливістю відповідних симетричних відносно неї переміщень полікінцевих елементів.
4. Зрівноважений силовий аксоїдний механізм за будь-яким із пп. 1-3, який відрізняється тим, що ведучі полікінцеві елементи принаймні одного його силового контуру мають можливість такого поступального переміщення, при якому геометричні осі їхніх опорних поверхонь завжди знаходяться поза зоною, обмеженою паралельними площинами, що проходять через геометричні осі опорних поверхонь його ведених полікінцевих елементів.
5. Зрівноважений силовий аксоїдний механізм за будь-яким із пп. 1-3, який відрізняється тим, що ведучі полікінцеві елементи принаймні одного його силового контуру мають можливість такого поступального переміщення, при якому геометричні осі їхніх опорних поверхонь завжди знаходяться всередині зони, обмеженої паралельними площинами, що проходять через геометричні осі опорних поверхонь його ведених полікінцевих елементів.
6. Зрівноважений силовий аксоїдний механізм за будь-яким із пп. 1-3, який відрізняється тим, що область переміщень геометричних осей опорних поверхонь ведучих полікінцевих елементів щонайменше одного його силового контуру поширюється в обидва боки від відповідних паралельних площин, що проходять через геометричні осі опорних поверхонь його ведених полікінцевих елементів.
7. Аксоїдний прес, що включає в себе станину, виконавчі органи та силові механізми для їх приведення в дію, який відрізняється тим, що щонайменше один із силових механізмів є зрівноваженим силовим аксоїдним механізмом за будь-яким із пп. 1-6.
Текст
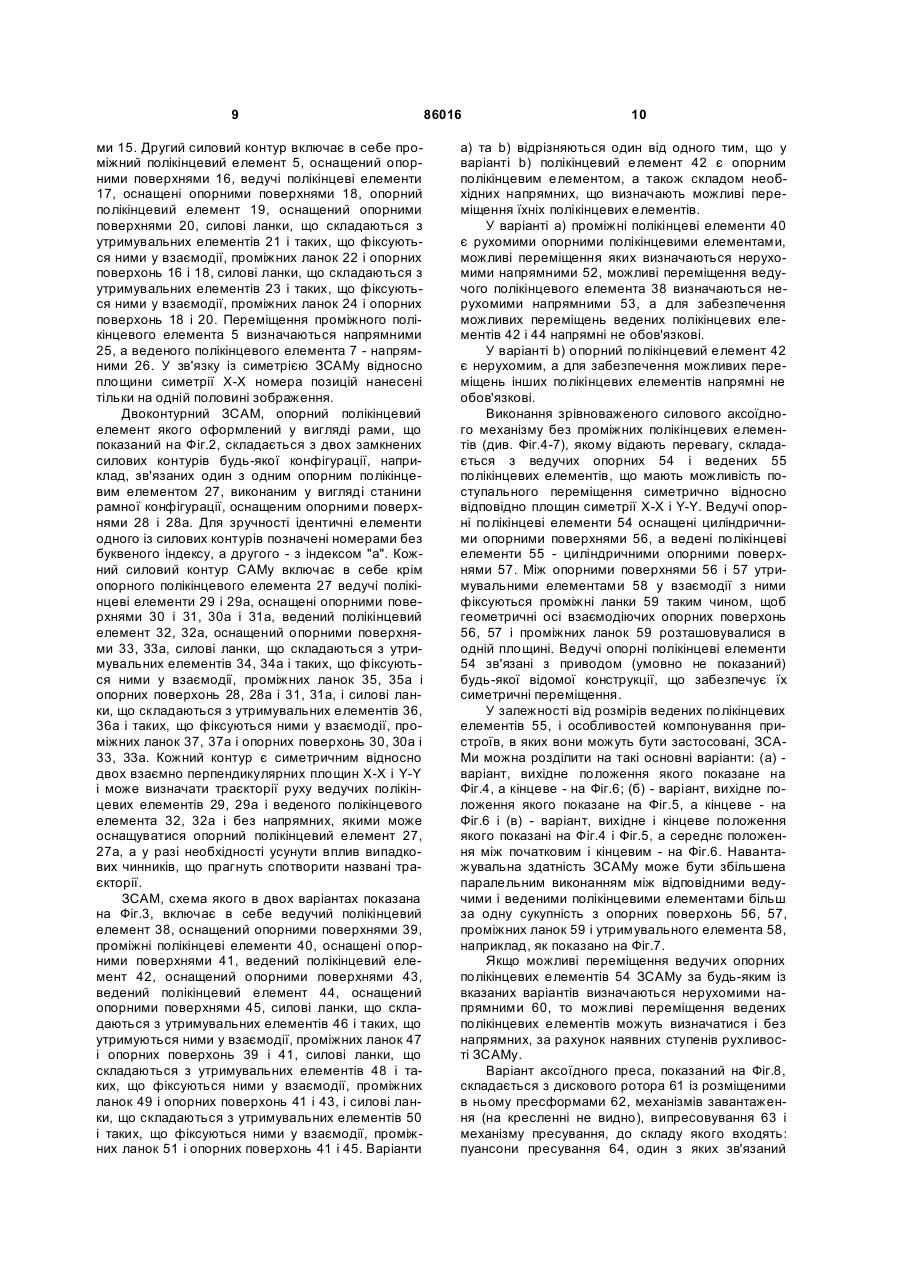
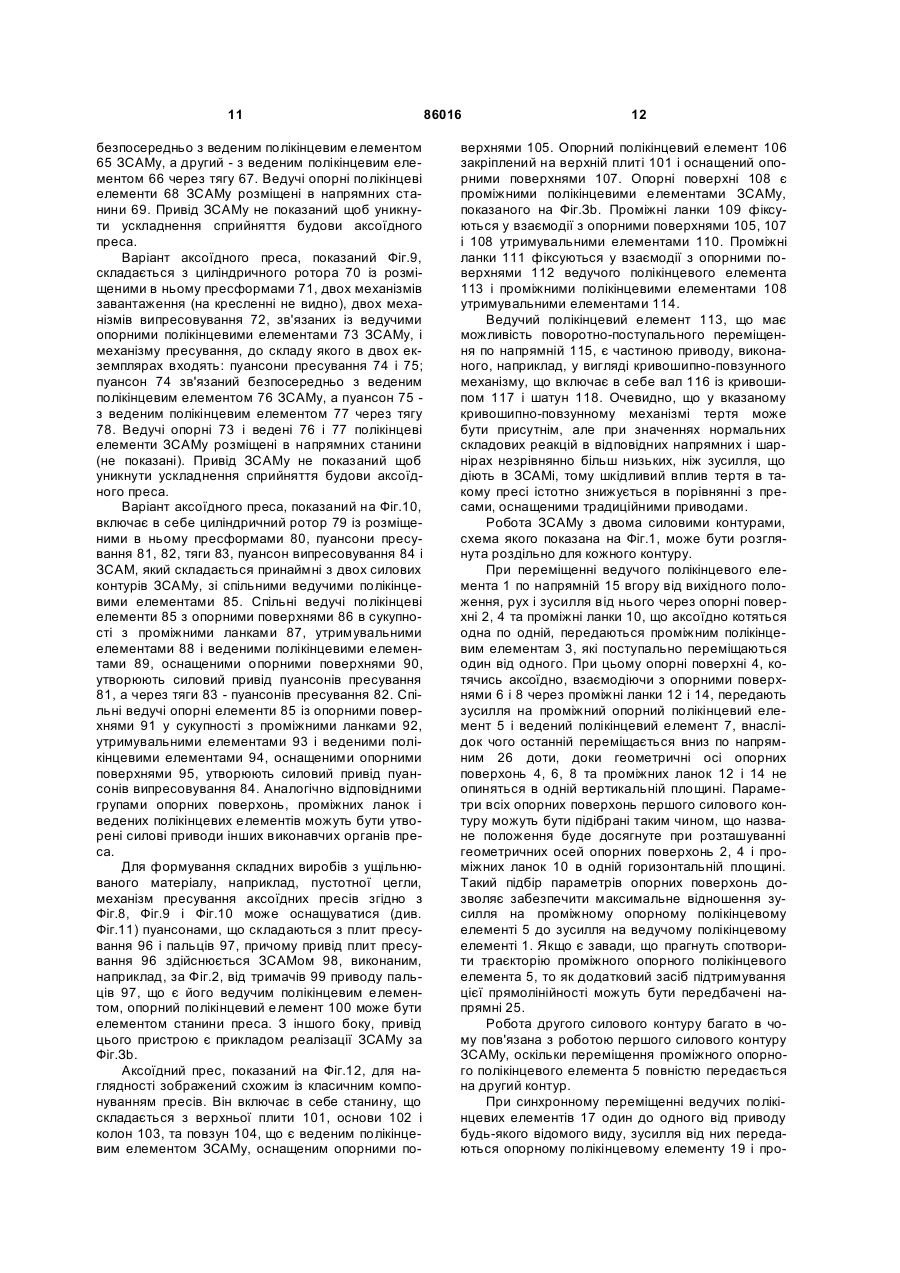
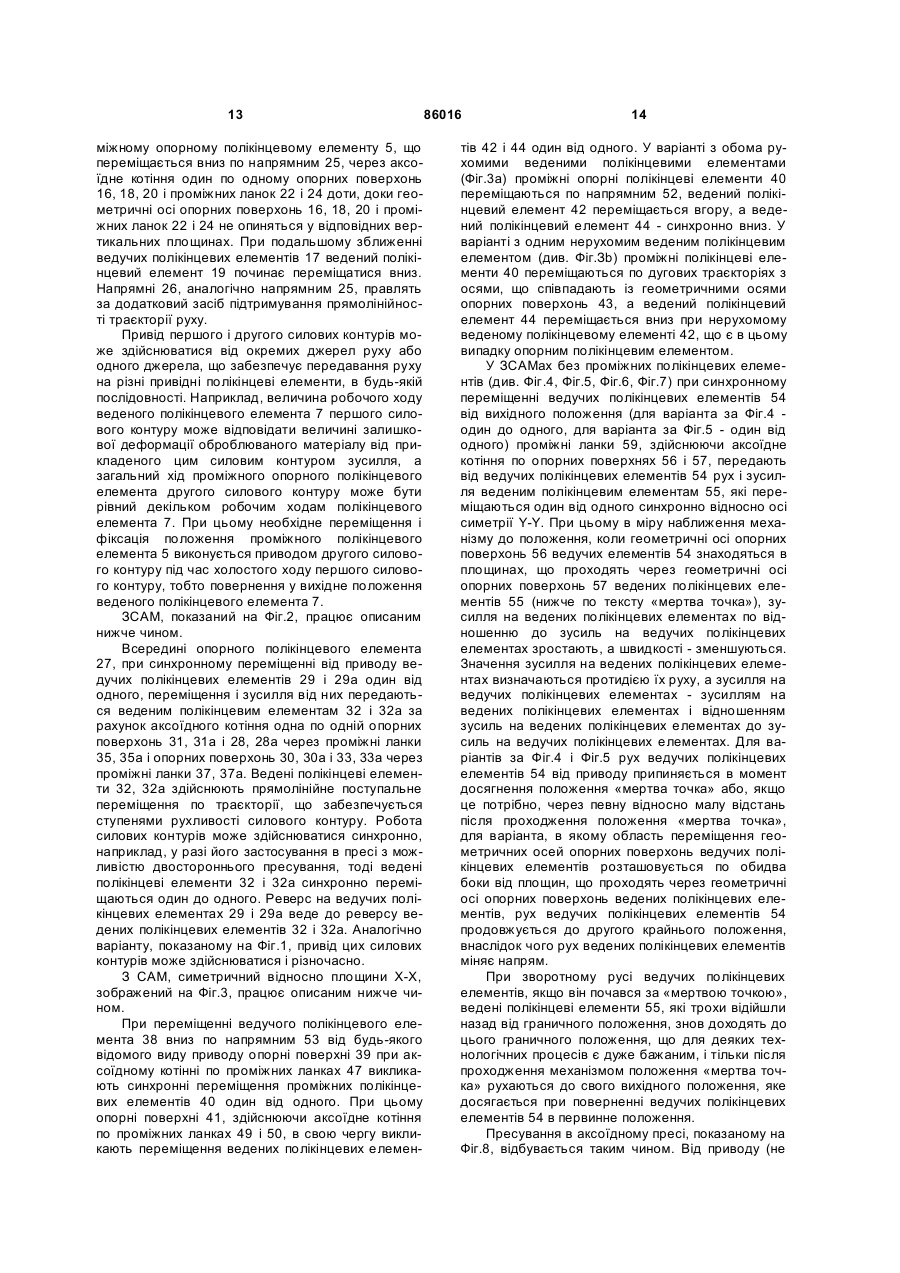
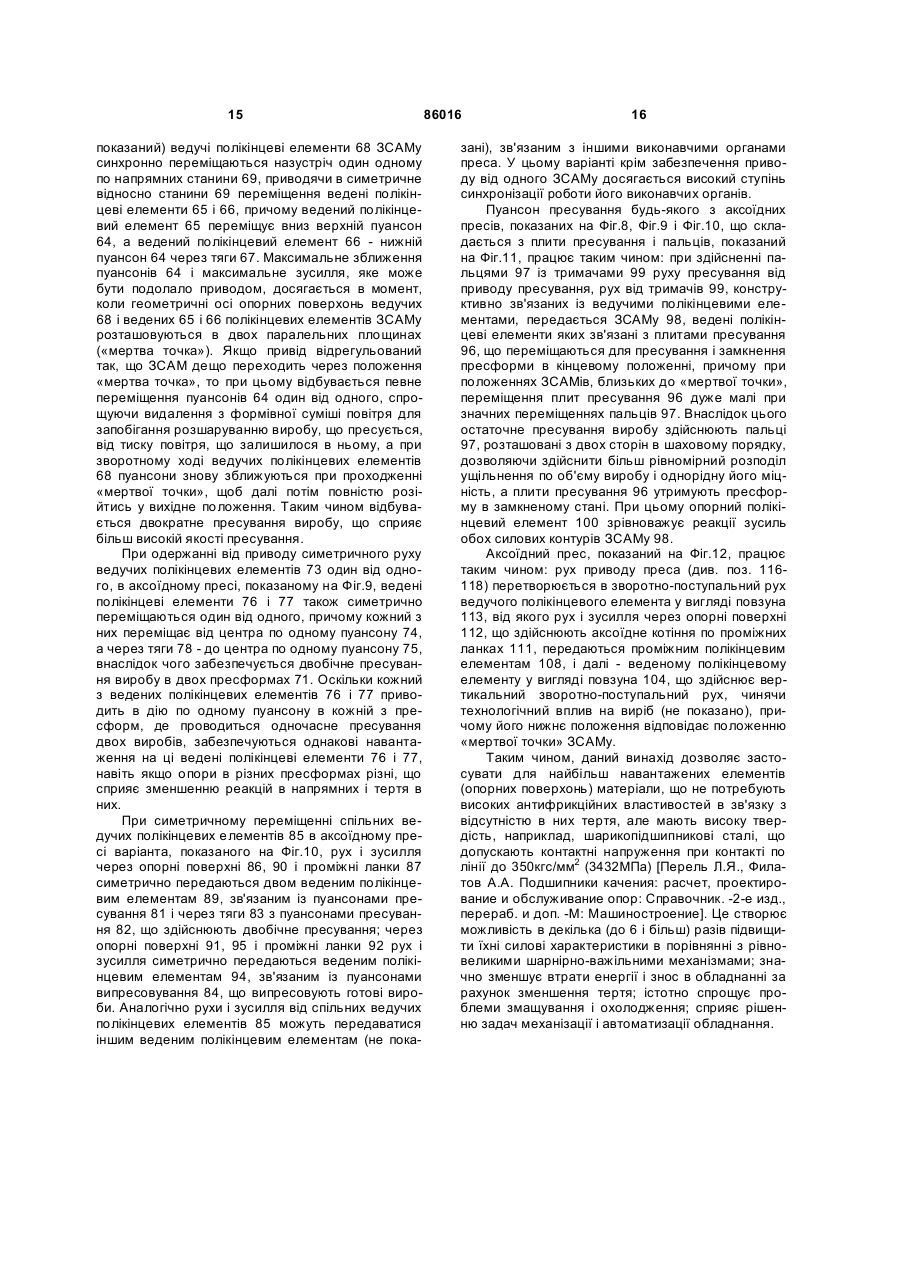
1. Зрівноважений силовий аксоїдний механізм, що включає в себе силові аксоїдні механізми, які мають кінцеві елементи, виконані з можливістю поступального переміщення, і проміжні елементи, оснащені опорними поверхнями, виконаними й розташованими так, що при переміщенні одного з кінцевих елементів забезпечується взаємне котіння опорних поверхонь без проковзування з передаванням руху і зусилля іншому кінцевому елементу, який відрізняється тим, що є системою силових ланок, кожна з яких включає в себе хоч би один силовий аксоїдний механізм, при цьому всі кінцеві елементи об'єднані у ведучі, ведені полікінцеві елементи, які об'єднують силові ланки принаймні в один силовий контур, що зрівноважує їхні зусилля. 2. Зрівноважений силовий аксоїдний механізм за п. 1, який відрізняється тим, що включає в себе принаймні один опорний полікінцевий елемент, всередині якого розміщені ведучі, ведені, а при необхідності проміжні полікінцеві елементи, що замикають силові ланки в один і біль ше сило вих контурів, що зрівноважують їхні зусилля. C2 2 UA 1 3 верхнями, і проміжну ланку, що складається з контактних елементів з опорними поверхнями, які взаємодіють з опорними поверхнями кінцевих елементів так, що при переміщенні одного кінцевого елемента забезпечується їх взаємне аксоїдне котіння без проковзування з передаванням зусиль і руху іншому кінцевому елементу. В такому механізмі тертя між елементами усувається внаслідок заміни ковзання на аксоїдне котіння опорних поверхонь елементів, що дозволяє застосувати для його виготовлення матеріали, які допускають високі контактні напруження. Внаслідок цього такі механізми мають у декілька разів більш високі силові характеристики, ніж шарнірно-важільні механізми з аналогічною кінематикою. Однак на напрямних кінцевих елементів САМу і зв'язаних із ними деталях, діючі зусилля викликають істотне тертя, яке призводить до їх швидкого зносу і енергетичних втрат. Зниження тертя на напрямних САМу може бути досягнуте усуненням або зменшенням нормальних складових реакцій, що діють на напрямні його кінцевих елементів, шляхом створення умов для їх взаємного зрівноваження. Цей спосіб зниження тертя в САМі відкриває широкі перспективи синтезу нових, більш ефективних зрівноважених силових аксоїдних механізмів, здатних працювати без істотного тертя в напрямних. У силових приводах технологічного обладнання застосовуються різні механізми, що розвивають великі зусилля, наприклад, важільні і кривошипноповзунні механізми, як в більшості пресів, в яких є шарнірні вузли і напрямні ковзання. Заміна цих традиційних приводів приводами, виконаними на основі САМів із зменшеним тертям і високою надійністю, дозволить здійснити подальше вдосконалення силового обладнання, зокрема, пресів. Суть винаходу Метою даного винаходу є розробка нових силових аксоїдних механізмів, названих зрівноваженими силовими аксоїдними механізмами (нижче по тексту «ЗСАМи»), в яких тертя на його кінцевих елементах, і кількість напрямних знижується шляхом зрівноваження діючих на них зусиль. Його різновиди можуть знайти широке практичне застосування в технологічному обладнанні, наприклад, у пресовому обладнанні, пов'язаному з великими зусиллями. Зрівноваження зусиль у ЗСАМі і відповідне зниження тертя на напрямних елементах, а в деяких випадках і усунення потреби в таких, досягається об'єднанням кінцевих елементів принаймні двох САМів, виконаних за Євразійським патентом №000482, в новий за функціональним призначенням елемент, названий полікінцевим, що зрівноважує зусилля так, що нормальна складова сукупного силового впливу полікінцевого елемента на відповідну напрямну була близька або дорівнювала нулю. Тому найпростіший ЗСАМ являє собою дволанковий механізм, що складається мінімально з двох САМів, у яких два кінцевих елементи об'єднані в один ведучий полікінцевий елемент, і принаймні один крайній кінцевий елемент якого є ве 86016 4 деним, рухомо або жорстко контактує з робочим органом, а другий кінцевий елемент з'єднаний з опорним елементом. Другий варіант виконання такого ЗСАМу відрізняється від першого тим, що два крайніх його кінцевих елементи є веденими і з'єднані з елементами робочих органів. Існує і третій варіант виконання такого ЗСАМу, коли один або два крайніх кінцевих елементи сприймають зусилля приводу і є ведучими, а центральні кінцеві елементи утворюють ведений полікінцевий елемент. У всіх випадках дві ланки такого ЗСАМу разом із нерухомими і рухомими опорними елементами, якими можуть бути, наприклад, елементи станини або робочих органів обладнання складають силовий контур, що зрівноважує зусилля і реакції на одному полікінцевому елементі. У разі замкненого силового контуру вся множина полікінцевих елементів ЗСАМу зрівноважує зусилля принаймні чотирьох його силових ланок, кожна з яких в свою чергу включає в себе один і більш САМів. При цьому силові ланки ЗСАМу утворюють один і більш замкнених силових контурів, в кожному з яких полікінцеві елементи зрівноважують зусилля, забезпечують роздільний і суміщений привід ведучих полікінцевих елементів кожного силового контуру, приймання, передавання зусиль і необхідних переміщень веденими полікінцевими елементами, з'єднаними з елементами інших механізмів або виконавчими органами. Якщо в ЗСАМі силові ланки утворюють два і більш силових контурів, в зонах їх контактування з'являються спільні для них проміжні полікінцеві елементи, що є веденими і ведучими у відповідних, таких що контактують при їх посередництві, силових зрівноважувальних контурах. Вони не взаємодіють безпосередньо з елементами приводу і інших виконавчих механізмів. Опорні полікінцеві елементи, наявні в ЗСАМі, виконують функцію нерухомих опор, призначених для компенсації зусиль силових ланок і ведучих полікінцевих елементів відповідних силових контурів і, як правило, замикають силовий контур силових ланок на станину обладнання. Ведучі, ведені і проміжні полікінцеві елементи можуть виконувати функцію рухомих опор в ЗСАМі і бути також додатковими опорними полікінцевими елементами, якщо їх переміщення обмежуються напрямними. Симетрія силових контурів ЗСАМу відносно принаймні одної площини створює сприятливі умови для повного зрівноваження симетричних відносно такої площини шкідливих складових зусиль на полікінцевих елементах. Це дозволяє усунути тертя в ЗСАМі і деяких напрямних за умови взаємозалежності переміщень ведучих і ведених полікінцевих елементів. Таким чином у ЗСАМі полікінцеві елементи забезпечують зрівноваження зусиль всередині відповідного силового контуру ланок, а їхня симетрія створює умови для усунення тертя і деяких напрямних елементів, що істотним чином відрізняє ЗСАМ від САМу і становить новизну і практичну застосовність даного винаходу. Силові ланки ЗСАМу можуть складати два і більш замкнених силових зрівноважених контурів, наприклад, із роздільним приводом ведучих полі 5 кінцевих елементів, симетричних відносно однієї площини, в якій лежить геометрична вісь напрямної принаймні одного ведучого полікінцевого елемента основного силового контуру, що одержує рух і/або зусилля від приводу. Ці зусилля можуть бути передані через силові ланки принаймні одному проміжному і одному веденому полікінцевому елементу, що контактує з робочим органом. Проміжний полікінцевий елемент, що є веденим елементом другого силового контуру ЗСАМу, може переміщатися під дією зусиль, що прикладають до нього і опорного полікінцевого елемента, зусиль силових ланок від двох ведучих полікінцевих елементів, які приймають їх від іншого приводу. У цьому випадку проміжний полікінцевий елемент може мати можливість незалежних від першого силового контуру переміщень і виконувати для нього функцію рухомого опорного полікінцевого елемента, положення якого може бути в кожному випадку технологічно задано і жорстко зафіксовано. Можливий і варіант ЗСАМу, який створює зусилля на крайньому веденому полікінцевому елементі. Для цього він включає в себе принаймні один опорний полікінцевий елемент. При наявності в ЗСАМі двох послідовно розташованих силових контурів ведений полікінцевий елемент першого силового контуру може бути ведучим полікінцевим елементом для другого силового контуру, а також проміжним опорним полікінцевим елементом ЗСАМу. Якщо силових контурів більше ніж два, то ведений полікінцевий елемент другого силового контуру буде також проміжним опорним полікінцевим елементом для третього, і так далі. Якщо ланки ЗСАМу утворюють декілька незалежних замкнених силових контурів, то вони, як правило, розташовуються всередині одного і більш опорних кінцевих елементів, що сприймають реакції зусиль їхніх силових ланок. При цьому ведучі полікінцеві елементи кожного незалежного силового контуру передають зусилля і переміщення своїх ланок відповідному веденому полікінцевому елементу, що здійснює в З САМІ роздільне переміщення і передавання зусиль. Сукупність зусиль і переміщень ведених полікінцевих елементів дозволяє здійснити ЗСАМу за допомогою робочих органів його основну технологічну функцію. ЗСАМ як система ведучих, проміжних, ведених і опорних полікінцевих елементів і силових ланок може мати незалежний або спільний для всіх силових контурів привід, а також бути симетричним відносно декількох площин. Це дозволяє обійтися без напрямних для деяких полікінцевих елементів, траєкторія руху яких в цьому випадку забезпечується ступенями рухливості ЗСАМу. Одним із таких, яким віддають перевагу для зрівноваження зусиль, є ЗСАМ, що включає в себе чотири силові ланки і чотири полікінцеві елементи, замкнені в один силовий контур, симетричний відносно двох взаємно перпендикулярних площин, що не має проміжних полікінцевих елементів, де пара ведучих полікінцевих елементів розташовується симетрично відносно одної площини симетрії, а пара ведених полікінцевих елементів - симетрично відносно іншої площини симетрії. У такому 86016 6 ЗСАМі всі нормальні до напрямних складові зусиль ведучих і ведених полікінцевих елементів взаємно зрівноважуються, а сили тертя близькі до нуля. Це дозволяє обійтися без деяких напрямних на полікінцевих елементах, за умови, що напрямні, що залишилися, забезпечують однозначну залежність переміщень ведених полікінцевих елементів від переміщень ведучих полікінцевих елементів. Якщо необхідно, область переміщення ведучих полікінцевих елементів може бути обмежена так, щоб область переміщення геометричних осей їхніх опорних поверхонь розташовувалася від середини за площинами, що проходять через геометричні осі відповідних опорних поверхонь ведених полікінцевих елементів, або між названими відповідними площинами, або по обидві сторони від названих відповідних площин. Варіанти розташування областей переміщення геометричних осей опорних поверхонь ведучих полікінцевих елементів створюють три можливих варіанти ЗСАМу, що також є об'єктом даного винаходу. Силова симетрія кожного з варіантів ЗСАМу, яким віддають перевагу, характерна тим, що до його ведучих і ведених полікінцевих елементів прикладаються зовнішні сили, попарно рівні за величиною і протилежні за напрямом. При цьому, якщо не враховувати сили тертя, то в цих варіантах ЗСАМу залежність зусиль на веденому полікінцевому елементі від зусилля на ведучому полікінцевому елементі виразиться у вигляді: P2 = P1tga, (1) де Р1 - зусилля на ведучому полікінцевому елементі; Р2 - зусилля на веденому полікінцевому елементі; a - кут між напрямом напрямної ведучого полікінцевого елемента і лінією, що проходить через геометричні осі опорних поверхонь відповідних ведучого і веденого полікінцевих елементів. Очевидно, що для ЗСАМу при значеннях кута а, близьких до 90° (коли геометричні осі опорних поверхонь ведучих полікінцевих елементів знаходяться поблизу площин, що проходять через відповідні геометричні осі опорних поверхонь ведених полікінцевих елементів), забезпечується значне збільшення відношення зусилля на веденому полікінцевому елементі до зусилля на ведучому полікінцевому елементі. Це робить його привабливим для силових приводів виконавчих органів технологічного обладнання з великими робочими зусиллями, наприклад, пресів. Таке обладнання можна розділити на три групи: 1) обладнання з відносно великим робочим ходом виконавчого органу і відносно малим робочим зусиллям на початку робочого ходу, що плавно зростає до кінця робочого ходу. До таких машин можуть відноситися пристрої, що здійснюють при їх роботі значне ущільнення оброблюваного матеріалу, наприклад, преси для формування виробів з ущільнюваного матеріалу; 2) обладнання з відносно малим робочим ходом виконавчого органу і великим робочим зусиллям, приблизно постійним в межах усього робочого ходу. До таких машин можуть відноситися пристрої для пластичної обробки виробів із металу з малою їх деформацією; 7 3) обладнання з відносно великим робочим ходом виконавчого органу і великим робочим зусиллям, приблизно постійним в межах усього робочого ходу. До таких машин можуть відноситися більшість пресів, вживаних в металообробці. Для всіх випадків нескладно синтезувати силовий привід обладнання на основі ЗСАМу високої компактності і з достатніми динамічними і кінематичними параметрами. Для цього необхідно виконати умову, яка полягає в тому, що в межах робочого ходу жодна точка графіка, що описує закон зміни навантаження на виконавчому органі при його переміщенні, не повинна бути вище відповідної точки графіка, що описує вираз (1). Відмінність третього випадку полягає в необхідності застосування ЗСАМів із декількома силовими контурами, що мають можливість розділеної подачі зусиль і переміщень. При цьому один і більш силових контурів забезпечують переміщення і фіксацію відносного положення основного силового контуру ланок ЗСАМу, що забезпечує привід виконавчого органу. Силові контури ланок ЗСАМу можуть мати роздільний або суміщений привід, виконаний на основі відомих пристроїв. Ця проблема може бути вирішена відповідним переміщенням першого силового зрівноважувального контуру САМу, що забезпечує переміщення, а також фіксацію його основного силового контуру, що створює зусилля на робочому органі, в межах деформації оброблюваного матеріалу. Ця умова дотримується без особливих ускладнень при автоматичному режимі включення силового приводу. У цьому випадку, після виконання робочого ходу одного циклу роботи основний силовий контур ЗСАМу повертається у вихідне положення. При цьому якщо матеріал оброблюваного виробу має залишкову деформацію, повернення основного силового контуру ЗСАМу у вихідне положення (холостий хід) здійснюється без силового впливу на виконавчий орган із боку оброблюваного виробу. У цей момент здійснюється переміщення опорного веденого полікінцевого елемента першого силового контуру, який має властивість зберігати надане йому положення, коли робочий орган прийме вихідне положення для чергового силового впливу на оброблюваний матеріал і таким чином забезпечує можливість здійснення робочого ходу з відповідним силовим впливом у межах робочого ходу опорного силового контуру САМу. При цьому керування його переміщенням може здійснюватися згідно з технологічною програмою обробки виробу. Тому ЗСАМ може бути практично застосований як силовий привід для обладнання з великим робочим ходом і великим робочим зусиллям. Перелік (фігур) На Фіг.1 показана схема ЗСАМу з двома послідовно розташованими силовими контурами; Фіг.2 - схема варіанта ЗСАМу з двома незалежними силовими контурами, опорний полікінцевий елемент якого оформлений у вигляді рами; Фіг.3 - схема ЗСАМу з ведучим, проміжними і веденими полікінцевими елементами в двох варіантах: а) з напрямними для проміжних полікінцевих елементів і двома рухомими веденими полікінцевими елементами; b) з одним опорним, одним 86016 8 веденим і проміжними полікінцевими елементами без напрямних; на Фіг.4 показаний перший варіант ЗСАМу без проміжних полікінцевих елементів у початковому положенні (те саме - початкове або кінцеве положення третього варіанта); Фіг.5 - другий варіант ЗСАМу без проміжних полікінцевих елементів у початковому положенні (те саме - кінцеве або початкове положення третього варіанта); Фіг.6 - ЗСАМ без проміжних полікінцевих елементів у положенні, коли геометричні осі опорних поверхонь ведучих полікінцевих елементів знаходяться поблизу поверхонь, що проходять через відповідні геометричні осі опорних поверхонь ведених полікінцевих елементів, яке є кінцевим положенням першого і другого варіантів ЗСАМу або середнім положенням третього варіанта; на Фіг.7 показаний варіант ЗСАМу без проміжних полікінцевих елементів, між ведучими і веденими полікінцевими елементами якого розміщено по дві сукупності опорних поверхонь; на Фіг.8 показаний варіант виконання аксоїдного преса з дисковим ротором для пресування виробів з ущільнюваних матеріалів із силовим приводом пресування на основі ЗСАМу за Фіг.4; на Фіг.9 показаний варіант виконання аксоїдного преса з циліндричним ротором для пресування виробів з ущільнюваних матеріалів із силовим приводом пресування на основі ЗСАМу за Фіг.5; на Фіг.10 показаний варіант виконання аксоїдного преса з циліндричним ротором для пресування виробів з ущільнюваних матеріалів із силовим приводом виконавчих органів на основі спільного ЗСАМу з двома ведучими полікінцевими елементами; на Фіг.11 показаний варіант виконання пуансонів механізму пресування з пальцями і плитами пресування, яким може бути оснащений будь-який з пресів за Фіг.8, Фіг.9, Фіг.10; на Фіг.12 показаний варіант аксоїдного преса з приводом на основі ЗСАМу за Фіг.3b. Можливість здійснення винаходу Зрівноважений силовий аксоїдний механізм, схема якого зображена на Фіг.1, включає в себе два силові контури. Перший силовий контур складається з ведучого полікінцевого елемента 1, оснащеного опорними поверхнями 2, проміжних полікінцевих елементів 3, оснащених опорними поверхнями 4, проміжного полікінцевого елемента 5, який є для всього ЗСАМу проміжним опорним полікінцевим елементом, оснащеного опорними поверхнями 6, веденого полікінцевого елемента 7, оснащеного опорними поверхнями 8, силових ланок, що складаються з утримувальних елементів 9 і таких, що фіксуються ними у взаємодії, проміжних ланок 10 і опорних поверхонь 2 та 4, силових ланок, що складаються з утримувальних елементів 11 і таких, що фіксуються ними у взаємодії, проміжних ланок 12 і опорних поверхонь 4 та 6, і силових ланок, що складаються з утримувальних елементів 13 і таких, що фіксуються ними у взаємодії, проміжних ланок 14 і опорних поверхонь 8 та 4. Можливі переміщення ведучого полікінцевого елемента 1 визначаються нерухомими напрямни 9 ми 15. Другий силовий контур включає в себе проміжний полікінцевий елемент 5, оснащений опорними поверхнями 16, ведучі полікінцеві елементи 17, оснащені опорними поверхнями 18, опорний полікінцевий елемент 19, оснащений опорними поверхнями 20, силові ланки, що складаються з утримувальних елементів 21 і таких, що фіксуються ними у взаємодії, проміжних ланок 22 і опорних поверхонь 16 і 18, силові ланки, що складаються з утримувальних елементів 23 і таких, що фіксуються ними у взаємодії, проміжних ланок 24 і опорних поверхонь 18 і 20. Переміщення проміжного полікінцевого елемента 5 визначаються напрямними 25, а веденого полікінцевого елемента 7 - напрямними 26. У зв'язку із симетрією ЗСАМу відносно площини симетрії Х-Х номера позицій нанесені тільки на одній половині зображення. Двоконтурний ЗСАМ, опорний полікінцевий елемент якого оформлений у вигляді рами, що показаний на Фіг.2, складається з двох замкнених силових контурів будь-якої конфігурації, наприклад, зв'язаних один з одним опорним полікінцевим елементом 27, виконаним у вигляді станини рамної конфігурації, оснащеним опорними поверхнями 28 і 28а. Для зручності ідентичні елементи одного із силових контурів позначені номерами без буквеного індексу, а другого - з індексом "а". Кожний силовий контур САМу включає в себе крім опорного полікінцевого елемента 27 ведучі полікінцеві елементи 29 і 29а, оснащені опорними поверхнями 30 і 31, 30а і 31а, ведений полікінцевий елемент 32, 32а, оснащений опорними поверхнями 33, 33а, силові ланки, що складаються з утримувальних елементів 34, 34а і таких, що фіксуються ними у взаємодії, проміжних ланок 35, 35а і опорних поверхонь 28, 28а і 31, 31а, і силові ланки, що складаються з утримувальних елементів 36, 36а і таких, що фіксуються ними у взаємодії, проміжних ланок 37, 37а і опорних поверхонь 30, 30а і 33, 33а. Кожний контур є симетричним відносно двох взаємно перпендикулярних площин Х-Х і Y-Y і може визначати траєкторії руху ведучих полікінцевих елементів 29, 29а і веденого полікінцевого елемента 32, 32а і без напрямних, якими може оснащуватися опорний полікінцевий елемент 27, 27а, а у разі необхідності усунути вплив випадкових чинників, що прагнуть спотворити названі траєкторії. ЗСАМ, схема якого в двох варіантах показана на Фіг.3, включає в себе ведучий полікінцевий елемент 38, оснащений опорними поверхнями 39, проміжні полікінцеві елементи 40, оснащені опорними поверхнями 41, ведений полікінцевий елемент 42, оснащений опорними поверхнями 43, ведений полікінцевий елемент 44, оснащений опорними поверхнями 45, силові ланки, що складаються з утримувальних елементів 46 і таких, що утримуються ними у взаємодії, проміжних ланок 47 і опорних поверхонь 39 і 41, силові ланки, що складаються з утримувальних елементів 48 і таких, що фіксуються ними у взаємодії, проміжних ланок 49 і опорних поверхонь 41 і 43, і силові ланки, що складаються з утримувальних елементів 50 і таких, що фіксуються ними у взаємодії, проміжних ланок 51 і опорних поверхонь 41 і 45. Варіанти 86016 10 а) та b) відрізняються один від одного тим, що у варіанті b) полікінцевий елемент 42 є опорним полікінцевим елементом, а також складом необхідних напрямних, що визначають можливі переміщення їхніх полікінцевих елементів. У варіанті а) проміжні полікінцеві елементи 40 є рухомими опорними полікінцевими елементами, можливі переміщення яких визначаються нерухомими напрямними 52, можливі переміщення ведучого полікінцевого елемента 38 визначаються нерухомими напрямними 53, а для забезпечення можливих переміщень ведених полікінцевих елементів 42 і 44 напрямні не обов'язкові. У варіанті b) опорний полікінцевий елемент 42 є нерухомим, а для забезпечення можливих переміщень інших полікінцевих елементів напрямні не обов'язкові. Виконання зрівноваженого силового аксоїдного механізму без проміжних полікінцевих елементів (див. Фіг.4-7), якому відають перевагу, складається з ведучих опорних 54 і ведених 55 полікінцевих елементів, що мають можливість поступального переміщення симетрично відносно відповідно площин симетрії Х-Х і Y-Y. Ведучі опорні полікінцеві елементи 54 оснащені циліндричними опорними поверхнями 56, а ведені полікінцеві елементи 55 - циліндричними опорними поверхнями 57. Між опорними поверхнями 56 і 57 утримувальними елементами 58 у взаємодії з ними фіксуються проміжні ланки 59 таким чином, щоб геометричні осі взаємодіючих опорних поверхонь 56, 57 і проміжних ланок 59 розташовувалися в одній площині. Ведучі опорні полікінцеві елементи 54 зв'язані з приводом (умовно не показаний) будь-якої відомої конструкції, що забезпечує їх симетричні переміщення. У залежності від розмірів ведених полікінцевих елементів 55, і особливостей компонування пристроїв, в яких вони можуть бути застосовані, ЗСАМи можна розділити на такі основні варіанти: (а) варіант, вихідне положення якого показане на Фіг.4, а кінцеве - на Фіг.6; (б) - варіант, вихідне положення якого показане на Фіг.5, а кінцеве - на Фіг.6 і (в) - варіант, вихідне і кінцеве положення якого показані на Фіг.4 і Фіг.5, а середнє положення між початковим і кінцевим - на Фіг.6. Навантажувальна здатність ЗСАМу може бути збільшена паралельним виконанням між відповідними ведучими і веденими полікінцевими елементами більш за одну сукупність з опорних поверхонь 56, 57, проміжних ланок 59 і утримувального елемента 58, наприклад, як показано на Фіг.7. Якщо можливі переміщення ведучих опорних полікінцевих елементів 54 ЗСАМу за будь-яким із вказаних варіантів визначаються нерухомими напрямними 60, то можливі переміщення ведених полікінцевих елементів можуть визначатися і без напрямних, за рахунок наявних ступенів рухливості ЗСАМу. Варіант аксоїдного преса, показаний на Фіг.8, складається з дискового ротора 61 із розміщеними в ньому пресформами 62, механізмів завантаження (на кресленні не видно), випресовування 63 і механізму пресування, до складу якого входять: пуансони пресування 64, один з яких зв'язаний 11 безпосередньо з веденим полікінцевим елементом 65 ЗСАМу, а другий - з веденим полікінцевим елементом 66 через тягу 67. Ведучі опорні полікінцеві елементи 68 ЗСАМу розміщені в напрямних станини 69. Привід ЗСАМу не показаний щоб уникнути ускладнення сприйняття будови аксоїдного преса. Варіант аксоїдного преса, показаний Фіг.9, складається з циліндричного ротора 70 із розміщеними в ньому пресформами 71, двох механізмів завантаження (на кресленні не видно), двох механізмів випресовування 72, зв'язаних із ведучими опорними полікінцевими елементами 73 ЗСАМу, і механізму пресування, до складу якого в двох екземплярах входять: пуансони пресування 74 і 75; пуансон 74 зв'язаний безпосередньо з веденим полікінцевим елементом 76 ЗСАМу, а пуансон 75 з веденим полікінцевим елементом 77 через тягу 78. Ведучі опорні 73 і ведені 76 і 77 полікінцеві елементи ЗСАМу розміщені в напрямних станини (не показані). Привід ЗСАМу не показаний щоб уникнути ускладнення сприйняття будови аксоїдного преса. Варіант аксоїдного преса, показаний на Фіг.10, включає в себе циліндричний ротор 79 із розміщеними в ньому пресформами 80, пуансони пресування 81, 82, тяги 83, пуансон випресовування 84 і ЗСАМ, який складається принаймні з двох силових контурів ЗСАМу, зі спільними ведучими полікінцевими елементами 85. Спільні ведучі полікінцеві елементи 85 з опорними поверхнями 86 в сукупності з проміжними ланками 87, утримувальними елементами 88 і веденими полікінцевими елементами 89, оснащеними опорними поверхнями 90, утворюють силовий привід пуансонів пресування 81, а через тяги 83 - пуансонів пресування 82. Спільні ведучі опорні елементи 85 із опорними поверхнями 91 у сукупності з проміжними ланками 92, утримувальними елементами 93 і веденими полікінцевими елементами 94, оснащеними опорними поверхнями 95, утворюють силовий привід пуансонів випресовування 84. Аналогічно відповідними групами опорних поверхонь, проміжних ланок і ведених полікінцевих елементів можуть бути утворені силові приводи інших виконавчих органів преса. Для формування складних виробів з ущільнюваного матеріалу, наприклад, пустотної цегли, механізм пресування аксоїдних пресів згідно з Фіг.8, Фіг.9 і Фіг.10 може оснащуватися (див. Фіг.11) пуансонами, що складаються з плит пресування 96 і пальців 97, причому привід плит пресування 96 здійснюється ЗСАМом 98, виконаним, наприклад, за Фіг.2, від тримачів 99 приводу пальців 97, що є його ведучим полікінцевим елементом, опорний полікінцевий елемент 100 може бути елементом станини преса. З іншого боку, привід цього пристрою є прикладом реалізації ЗСАМу за Фіг.Зb. Аксоїдний прес, показаний на Фіг.12, для наглядності зображений схожим із класичним компонуванням пресів. Він включає в себе станину, що складається з верхньої плити 101, основи 102 і колон 103, та повзун 104, що є веденим полікінцевим елементом ЗСАМу, оснащеним опорними по 86016 12 верхнями 105. Опорний полікінцевий елемент 106 закріплений на верхній плиті 101 і оснащений опорними поверхнями 107. Опорні поверхні 108 є проміжними полікінцевими елементами ЗСАМу, показаного на Фіг.Зb. Проміжні ланки 109 фіксуються у взаємодії з опорними поверхнями 105, 107 і 108 утримувальними елементами 110. Проміжні ланки 111 фіксуються у взаємодії з опорними поверхнями 112 ведучого полікінцевого елемента 113 і проміжними полікінцевими елементами 108 утримувальними елементами 114. Ведучий полікінцевий елемент 113, що має можливість поворотно-поступального переміщення по напрямній 115, є частиною приводу, виконаного, наприклад, у вигляді кривошипно-повзунного механізму, що включає в себе вал 116 із кривошипом 117 і шатун 118. Очевидно, що у вказаному кривошипно-повзунному механізмі тертя може бути присутнім, але при значеннях нормальних складових реакцій в відповідних напрямних і шарнірах незрівнянно більш низьких, ніж зусилля, що діють в ЗСАМі, тому шкідливий вплив тертя в такому пресі істотно знижується в порівнянні з пресами, оснащеними традиційними приводами. Робота ЗСАМу з двома силовими контурами, схема якого показана на Фіг.1, може бути розглянута роздільно для кожного контуру. При переміщенні ведучого полікінцевого елемента 1 по напрямній 15 вгору від вихідного положення, рух і зусилля від нього через опорні поверхні 2, 4 та проміжні ланки 10, що аксоїдно котяться одна по одній, передаються проміжним полікінцевим елементам 3, які поступально переміщаються один від одного. При цьому опорні поверхні 4, котячись аксоїдно, взаємодіючи з опорними поверхнями 6 і 8 через проміжні ланки 12 і 14, передають зусилля на проміжний опорний полікінцевий елемент 5 і ведений полікінцевий елемент 7, внаслідок чого останній переміщається вниз по напрямним 26 доти, доки геометричні осі опорних поверхонь 4, 6, 8 та проміжних ланок 12 і 14 не опиняться в одній вертикальній площині. Параметри всіх опорних поверхонь першого силового контуру можуть бути підібрані таким чином, що назване положення буде досягнуте при розташуванні геометричних осей опорних поверхонь 2, 4 і проміжних ланок 10 в одній горизонтальній площині. Такий підбір параметрів опорних поверхонь дозволяє забезпечити максимальне відношення зусилля на проміжному опорному полікінцевому елементі 5 до зусилля на ведучому полікінцевому елементі 1. Якщо є завади, що прагнуть спотворити траєкторію проміжного опорного полікінцевого елемента 5, то як додатковий засіб підтримування цієї прямолінійності можуть бути передбачені напрямні 25. Робота другого силового контуру багато в чому пов'язана з роботою першого силового контуру ЗСАМу, оскільки переміщення проміжного опорного полікінцевого елемента 5 повністю передається на другий контур. При синхронному переміщенні ведучих полікінцевих елементів 17 один до одного від приводу будь-якого відомого виду, зусилля від них передаються опорному полікінцевому елементу 19 і про 13 міжному опорному полікінцевому елементу 5, що переміщається вниз по напрямним 25, через аксоїдне котіння один по одному опорних поверхонь 16, 18, 20 і проміжних ланок 22 і 24 доти, доки геометричні осі опорних поверхонь 16, 18, 20 і проміжних ланок 22 і 24 не опиняться у відповідних вертикальних площинах. При подальшому зближенні ведучих полікінцевих елементів 17 ведений полікінцевий елемент 19 починає переміщатися вниз. Напрямні 26, аналогічно напрямним 25, правлять за додатковий засіб підтримування прямолінійності траєкторії руху. Привід першого і другого силових контурів може здійснюватися від окремих джерел руху або одного джерела, що забезпечує передавання руху на різні привідні полікінцеві елементи, в будь-якій послідовності. Наприклад, величина робочого ходу веденого полікінцевого елемента 7 першого силового контуру може відповідати величині залишкової деформації оброблюваного матеріалу від прикладеного цим силовим контуром зусилля, а загальний хід проміжного опорного полікінцевого елемента другого силового контуру може бути рівний декільком робочим ходам полікінцевого елемента 7. При цьому необхідне переміщення і фіксація положення проміжного полікінцевого елемента 5 виконується приводом другого силового контуру під час холостого ходу першого силового контуру, тобто повернення у вихідне положення веденого полікінцевого елемента 7. ЗСАМ, показаний на Фіг.2, працює описаним нижче чином. Всередині опорного полікінцевого елемента 27, при синхронному переміщенні від приводу ведучих полікінцевих елементів 29 і 29а один від одного, переміщення і зусилля від них передаються веденим полікінцевим елементам 32 і 32а за рахунок аксоїдного котіння одна по одній опорних поверхонь 31, 31а і 28, 28а через проміжні ланки 35, 35а і опорних поверхонь 30, 30а і 33, 33а через проміжні ланки 37, 37а. Ведені полікінцеві елементи 32, 32а здійснюють прямолінійне поступальне переміщення по траєкторії, що забезпечується ступенями рухливості силового контуру. Робота силових контурів може здійснюватися синхронно, наприклад, у разі його застосування в пресі з можливістю двостороннього пресування, тоді ведені полікінцеві елементи 32 і 32а синхронно переміщаються один до одного. Реверс на ведучих полікінцевих елементах 29 і 29а веде до реверсу ведених полікінцевих елементів 32 і 32а. Аналогічно варіанту, показаному на Фіг.1, привід цих силових контурів може здійснюватися і різночасно. З САМ, симетричний відносно площини Х-Х, зображений на Фіг.3, працює описаним нижче чином. При переміщенні ведучого полікінцевого елемента 38 вниз по напрямним 53 від будь-якого відомого виду приводу опорні поверхні 39 при аксоїдному котінні по проміжних ланках 47 викликають синхронні переміщення проміжних полікінцевих елементів 40 один від одного. При цьому опорні поверхні 41, здійснюючи аксоїдне котіння по проміжних ланках 49 і 50, в свою чергу викликають переміщення ведених полікінцевих елемен 86016 14 тів 42 і 44 один від одного. У варіанті з обома рухомими веденими полікінцевими елементами (Фіг.3а) проміжні опорні полікінцеві елементи 40 переміщаються по напрямним 52, ведений полікінцевий елемент 42 переміщається вгору, а ведений полікінцевий елемент 44 - синхронно вниз. У варіанті з одним нерухомим веденим полікінцевим елементом (див. Фіг.Зb) проміжні полікінцеві елементи 40 переміщаються по дугових траєкторіях з осями, що співпадають із геометричними осями опорних поверхонь 43, а ведений полікінцевий елемент 44 переміщається вниз при нерухомому веденому полікінцевому елементі 42, що є в цьому випадку опорним полікінцевим елементом. У ЗСАМах без проміжних полікінцевих елементів (див. Фіг.4, Фіг.5, Фіг.6, Фіг.7) при синхронному переміщенні ведучих полікінцевих елементів 54 від вихідного положення (для варіанта за Фіг.4 один до одного, для варіанта за Фіг.5 - один від одного) проміжні ланки 59, здійснюючи аксоїдне котіння по опорних поверхнях 56 і 57, передають від ведучих полікінцевих елементів 54 рух і зусилля веденим полікінцевим елементам 55, які переміщаються один від одного синхронно відносно осі симетрії Y-Y. При цьому в міру наближення механізму до положення, коли геометричні осі опорних поверхонь 56 ведучих елементів 54 знаходяться в площинах, що проходять через геометричні осі опорних поверхонь 57 ведених полікінцевих елементів 55 (нижче по тексту «мертва точка»), зусилля на ведених полікінцевих елементах по відношенню до зусиль на ведучих полікінцевих елементах зростають, а швидкості - зменшуються. Значення зусилля на ведених полікінцевих елементах визначаються протидією їх руху, а зусилля на ведучих полікінцевих елементах - зусиллям на ведених полікінцевих елементах і відношенням зусиль на ведених полікінцевих елементах до зусиль на ведучих полікінцевих елементах. Для варіантів за Фіг.4 і Фіг.5 рух ведучих полікінцевих елементів 54 від приводу припиняється в момент досягнення положення «мертва точка» або, якщо це потрібно, через певну відносно малу відстань після проходження положення «мертва точка», для варіанта, в якому область переміщення геометричних осей опорних поверхонь ведучих полікінцевих елементів розташовується по обидва боки від площин, що проходять через геометричні осі опорних поверхонь ведених полікінцевих елементів, рух ведучих полікінцевих елементів 54 продовжується до другого крайнього положення, внаслідок чого рух ведених полікінцевих елементів міняє напрям. При зворотному русі ведучих полікінцевих елементів, якщо він почався за «мертвою точкою», ведені полікінцеві елементи 55, які трохи відійшли назад від граничного положення, знов доходять до цього граничного положення, що для деяких технологічних процесів є дуже бажаним, і тільки після проходження механізмом положення «мертва точка» рухаються до свого вихідного положення, яке досягається при поверненні ведучих полікінцевих елементів 54 в первинне положення. Пресування в аксоїдному пресі, показаному на Фіг.8, відбувається таким чином. Від приводу (не 15 показаний) ведучі полікінцеві елементи 68 ЗСАМу синхронно переміщаються назустріч один одному по напрямних станини 69, приводячи в симетричне відносно станини 69 переміщення ведені полікінцеві елементи 65 і 66, причому ведений полікінцевий елемент 65 переміщує вниз верхній пуансон 64, а ведений полікінцевий елемент 66 - нижній пуансон 64 через тяги 67. Максимальне зближення пуансонів 64 і максимальне зусилля, яке може бути подолало приводом, досягається в момент, коли геометричні осі опорних поверхонь ведучих 68 і ведених 65 і 66 полікінцевих елементів ЗСАМу розташовуються в двох паралельних площинах («мертва точка»). Якщо привід відрегульований так, що ЗСАМ дещо переходить через положення «мертва точка», то при цьому відбувається певне переміщення пуансонів 64 один від одного, спрощуючи видалення з формівної суміші повітря для запобігання розшаруванню виробу, що пресується, від тиску повітря, що залишилося в ньому, а при зворотному ході ведучих полікінцевих елементів 68 пуансони знову зближуються при проходженні «мертвої точки», щоб далі потім повністю розійтись у вихідне положення. Таким чином відбувається двократне пресування виробу, що сприяє більш високій якості пресування. При одержанні від приводу симетричного руху ведучих полікінцевих елементів 73 один від одного, в аксоїдному пресі, показаному на Фіг.9, ведені полікінцеві елементи 76 і 77 також симетрично переміщаються один від одного, причому кожний з них переміщає від центра по одному пуансону 74, а через тяги 78 - до центра по одному пуансону 75, внаслідок чого забезпечується двобічне пресування виробу в двох пресформах 71. Оскільки кожний з ведених полікінцевих елементів 76 і 77 приводить в дію по одному пуансону в кожній з пресформ, де проводиться одночасне пресування двох виробів, забезпечуються однакові навантаження на ці ведені полікінцеві елементи 76 і 77, навіть якщо опори в різних пресформах різні, що сприяє зменшенню реакцій в напрямних і тертя в них. При симетричному переміщенні спільних ведучих полікінцевих елементів 85 в аксоїдному пресі варіанта, показаного на Фіг.10, рух і зусилля через опорні поверхні 86, 90 і проміжні ланки 87 симетрично передаються двом веденим полікінцевим елементам 89, зв'язаним із пуансонами пресування 81 і через тяги 83 з пуансонами пресування 82, що здійснюють двобічне пресування; через опорні поверхні 91, 95 і проміжні ланки 92 рух і зусилля симетрично передаються веденим полікінцевим елементам 94, зв'язаним із пуансонами випресовування 84, що випресовують готові вироби. Аналогічно рухи і зусилля від спільних ведучих полікінцевих елементів 85 можуть передаватися іншим веденим полікінцевим елементам (не пока 86016 16 зані), зв'язаним з іншими виконавчими органами преса. У цьому варіанті крім забезпечення приводу від одного ЗСАМу досягається високий ступінь синхронізації роботи його виконавчих органів. Пуансон пресування будь-якого з аксоїдних пресів, показаних на Фіг.8, Фіг.9 і Фіг.10, що складається з плити пресування і пальців, показаний на Фіг.11, працює таким чином: при здійсненні пальцями 97 із тримачами 99 руху пресування від приводу пресування, рух від тримачів 99, конструктивно зв'язаних із ведучими полікінцевими елементами, передається ЗСАМу 98, ведені полікінцеві елементи яких зв'язані з плитами пресування 96, що переміщаються для пресування і замкнення пресформи в кінцевому положенні, причому при положеннях ЗСАМів, близьких до «мертвої точки», переміщення плит пресування 96 дуже малі при значних переміщеннях пальців 97. Внаслідок цього остаточне пресування виробу здійснюють пальці 97, розташовані з двох сторін в шаховому порядку, дозволяючи здійснити більш рівномірний розподіл ущільнення по об'єму виробу і однорідну його міцність, а плити пресування 96 утримують пресформу в замкненому стані. При цьому опорний полікінцевий елемент 100 зрівноважує реакції зусиль обох силових контурів ЗСАМу 98. Аксоїдний прес, показаний на Фіг.12, працює таким чином: рух приводу преса (див. поз. 116118) перетворюється в зворотно-поступальний рух ведучого полікінцевого елемента у вигляді повзуна 113, від якого рух і зусилля через опорні поверхні 112, що здійснюють аксоїдне котіння по проміжних ланках 111, передаються проміжним полікінцевим елементам 108, і далі - веденому полікінцевому елементу у вигляді повзуна 104, що здійснює вертикальний зворотно-поступальний рух, чинячи технологічний вплив на виріб (не показано), причому його нижнє положення відповідає положенню «мертвої точки» ЗСАМу. Таким чином, даний винахід дозволяє застосувати для найбільш навантажених елементів (опорних поверхонь) матеріали, що не потребують високих антифрикційних властивостей в зв'язку з відсутністю в них тертя, але мають високу твердість, наприклад, шарикопідшипникові сталі, що допускають контактні напруження при контакті по лінії до 350кгс/мм2 (3432МПа) [Перель Л.Я., Филатов A.A. Подшипники качения: расчет, проектирование и обслуживание опор: Справочник. -2-е изд., перераб. и доп. -М: Машиностроение]. Це створює можливість в декілька (до 6 і більш) разів підвищити їхні силові характеристики в порівнянні з рівновеликими шарнірно-важільними механізмами; значно зменшує втрати енергії і знос в обладнанні за рахунок зменшення тертя; істотно спрощує проблеми змащування і охолодження; сприяє рішенню задач механізації і автоматизації обладнання. 17 86016 18 19 86016 20 21 Комп’ютерна верстка Л.Литвиненко 86016 Підписне 22 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюBalanced power axoid mechanism and axoid press
Автори англійськоюDon Yevhen Alekseevich, Kim Florid Borisovich, Smaryhin Ihor Vladimirovich
Назва патенту російськоюУравновешенный силовой аксоидный механизм и аксоидный пресс
Автори російськоюДОН Евгений Алексеевич, КИМ Флорид Борисович, СМАРЫГИН Игорь Владимирович
МПК / Мітки
МПК: B30B 1/00, F16H 21/16
Мітки: аксоїдний, силовий, механізм, зрівноважений, прес
Код посилання
<a href="https://ua.patents.su/11-86016-zrivnovazhenijj-silovijj-aksodnijj-mekhanizm-ta-aksodnijj-pres.html" target="_blank" rel="follow" title="База патентів України">Зрівноважений силовий аксоїдний механізм та аксоїдний прес</a>
Динамічно зрівноважений зубчато-важільний механізм
Номер патенту: 26506
Опубліковано: 25.09.2007
Автори: Амбарцумянц Роберт Вачаганович, Тутаєв Сергій Валерійович
МПК: F16H 29/00
Мітки: зубчато-важільний, зрівноважений, механізм, динамічної
Формула / Реферат:
Динамічно зрівноважений зубчато-важільний механізм, який містить нерухоме центральне колесо, сателіти, водило, важелі, що з'єднують сателіти з вихідною ланкою, який відрізняється тим, що ведена ланка з'єднана рухомо з двома і більше важелями, з'єднаними рухомо з кривошипами, жорстко закріпленими з сателітами, і число важелів, з'єднуючих сателіт із вихідною ланкою, строго дорівнює числу сателітів.
Силовий механізм чотирициліндрового двигуна внутрішнього згоряння
Номер патенту: 85325
Опубліковано: 12.01.2009
Автор: Месонжник Семен Моїсійович
МПК: F02B 1/00
Мітки: чотирициліндрового, двигуна, механізм, згоряння, силовий, внутрішнього
Формула / Реферат:
1. Силовий механізм чотирициліндрового двигуна внутрішнього згоряння, що має два зв'язаних зубчастою передачею рівнобіжних колінчатих вали з щоками, на яких розташовані консольні кривошипи, що несуть на собі шатуни, зв'язані з циліндро-поршневими групами двигуна, які розташовані в два ряди по дві у кожному ряду, який відрізняється тим, що кожний колінчатий вал виконаний збірним і складається з двох ідентичних половин, кожна з яких поєднує в...
Механізм керування секторами секторної прес-форми форматора вулканізатора
Номер патенту: 59868
Опубліковано: 15.09.2003
Автори: Чернозем Василь Васильович, Ковтун Павло Григорович
МПК: B29C 35/02
Мітки: прес-форми, секторної, секторами, форматора, механізм, керування, вулканізатора
Формула / Реферат:
1. Механізм керування секторами секторної прес-форми, що містить нижню напівформу, на якій розташовані радіально рухомі сектори та сектороносії, для повного розкриття яких передбачена пружина, та верхню напівформу, рухому в осьовому напрямі, яка закріплена на плиті, і конус, який відрізняється тим, що плита рухається вертикально по вкручених в конус напрямних, а опорна поверхня сектороносія, який рухається радіально по основі по спарених...
Провід неізольований зрівноважений
Номер патенту: 2750
Опубліковано: 16.08.2004
Автори: Кримський Михайло Мусійович, Житніков Володимир Іванович
МПК: H01B 5/00
Мітки: провід, зрівноважений, неізольований
Формула / Реферат:
Провід неізольований зрівноважений багатошаровий, багатодротовий, що складений з сталевих та алюмінієвих дротів, призначений для пересилання електричної енергії висячою системою надземної електричної лінії, який відрізняється тим, що містить один шар з сталевими дротами поміж алюмінієвими дротами, а шари закручені за напрямками, що нейтралізують моменти крутіння у проводі в цілому.
Силовий елемент із композиційних матеріалів

Номер патенту: 7639
Опубліковано: 15.07.2005
Автори: Кріцук Аркадій Антонович, Зірка Анатолій Іванович, Озеров Валентин Іванович, Бабич Іван Юрійович
МПК: F16S 1/00
Мітки: композиційних, силовий, елемент, матеріалів
Формула / Реферат:
Силовий елемент із композиційних матеріалів, який складається із основи, виконаної із пористого заповнювача, петльових тяжів, металевих вкладників - фітингів, силової кільцевої обмотки, який відрізняється тим, що силові петльові тяжі виконано у двох взаємно перпендикулярних площинах і залежно від виду кріплення (болтового чи гвинтового) виконані суцільними або із рознесенням, і з’єднані в єдине ціле силовим кільцевим обмотуванням - оболонкою,...
Попередній патент: Спосіб одержання твердої лікарської форми з покриттям
Наступний патент: Застосування храпового механізму як запобіжника натяжіння клинових пасів багаторівчакової передачі, протилежного робочому
Випадковий патент: Рекурентно-адаптивний спосіб зменшення надлишковості інформаційних потоків