Модульно структурований військовий наземний робот з функціональними блоками-модулями повороту
Номер патенту: 90979
Опубліковано: 10.06.2010
Автори: Беліков Віктор Тріфонович, Толстой Олексій Володимирович, Поповіченко Олександр Вікторович, Васильєв Валерій Валентинович
Формула / Реферат
1. Модульно структурований військовий наземний робот з функціональними блоками-модулями повороту, що включає електрохімічні, конденсаторні або комбіновані джерела електричної енергії, її перетворювачі, електромеханічні колісні, гусеничні або колісно-гусеничні рушії, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а так само комплект головного виконавчого устаткування, що включає системи стрілецького і артилерійського озброєння, маніпулятори, блоки-модулі самоліквідації та ін., який відрізняється тим, що він забезпечений комплексом поворотних електромеханічних блоків-модулів горизонтального і вертикального наведення систем озброєння, кожен з яких виконаний у вигляді плоского торцевого широкорегульованого електричного двигуна із закріпленими на одному, наприклад, верхньому дисковому магнітопроводі вказаного двигуна високоенергетичними постійними магнітами, розміщеними на парному числі полюсних ділень по всій поверхні кільця цього магнітопроводу, для створення основного магнітного поля, і якірної обмотки управління, частково або повністю розміщеної на цілому парному числі полюсних ділень його другого, наприклад, нижнього дискового магнітопроводу, причому поворотні блоки-модулі жорстко закріплені або безпосередньо на виконавчих блоках-модулях озброєння, або входять як складові елементи в блоки-модулі озброєння другого і третього рівнів складності.
2. Модульно структурований військовий наземний робот з функціональними блоками-модулями повороту за п. 1, який відрізняється тим, що комплекти блоків-модулів стрілецького і артилерійського озброєння безпосередньо жорстко прикріплені до верхньої і нижньої основ поворотних блоків-модулів, що здійснюють поворот в горизонтальній площині.
3. Модульно структурований військовий наземний робот з функціональними блоками-модулями повороту за п. 1, який відрізняється тим, що комплекти блоків-модулів стрілецького і артилерійського озброєння встановлені з можливістю обертання навколо поперечної осі в коробчастому корпусі блока-модуля другого рівня складності.
4. Модульно структурований військовий наземний робот з функціональними блоками-модулями повороту за п. 1, який відрізняється тим, що комплекти його стрілецького і артилерійського озброєння встановлені в блоках-модулях третього рівня складності, забезпечених блоками-модулями горизонтального і вертикального наведення озброєння.
Текст
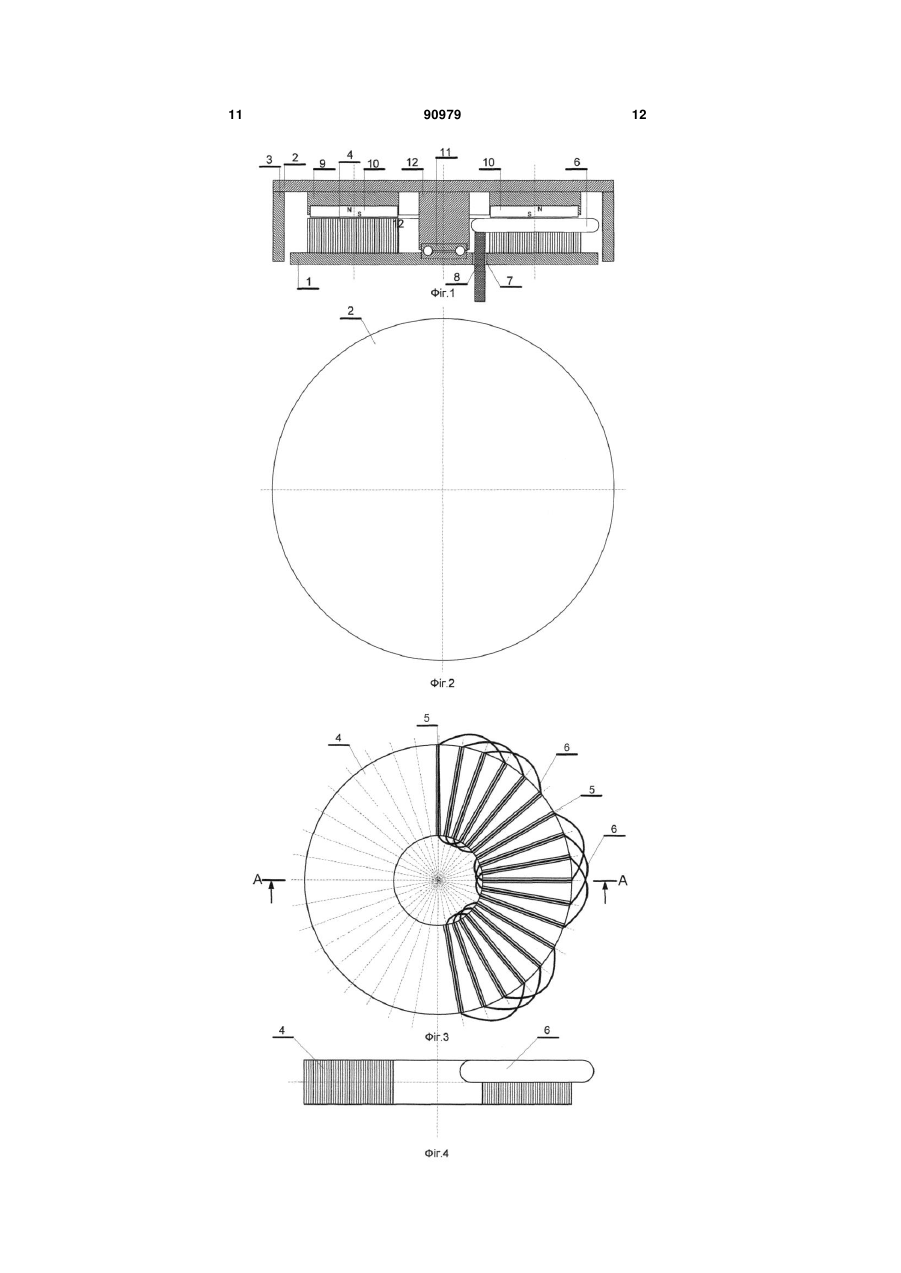
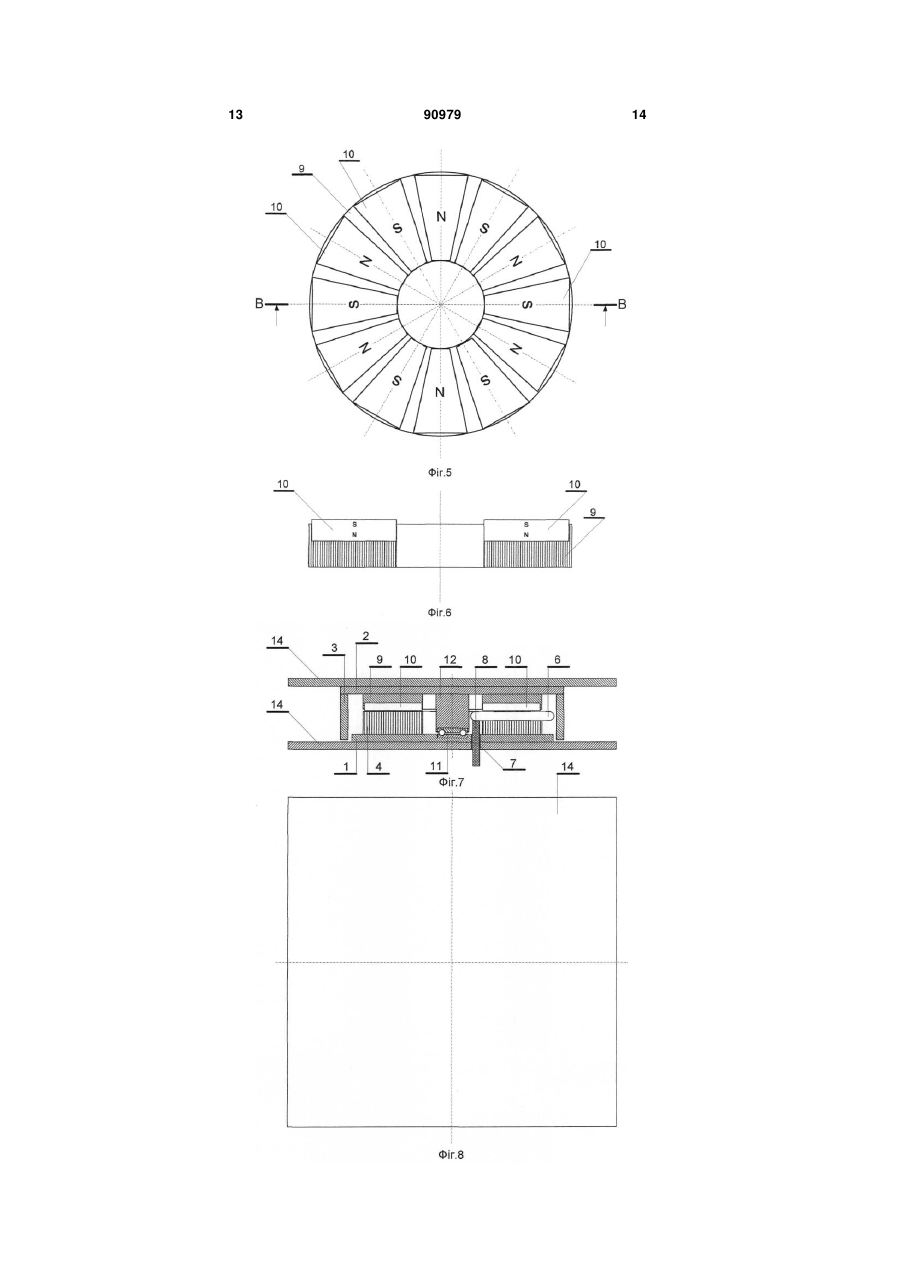
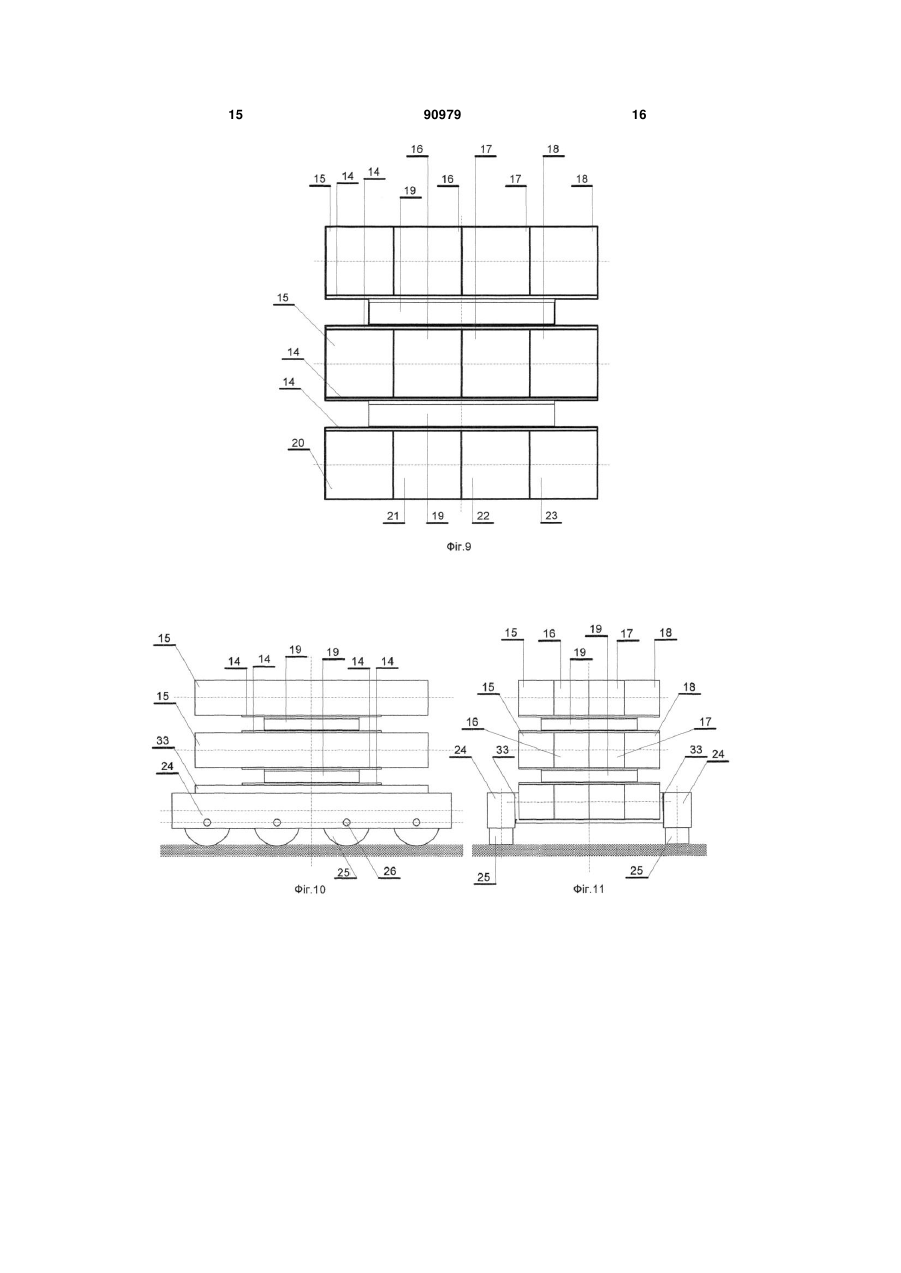
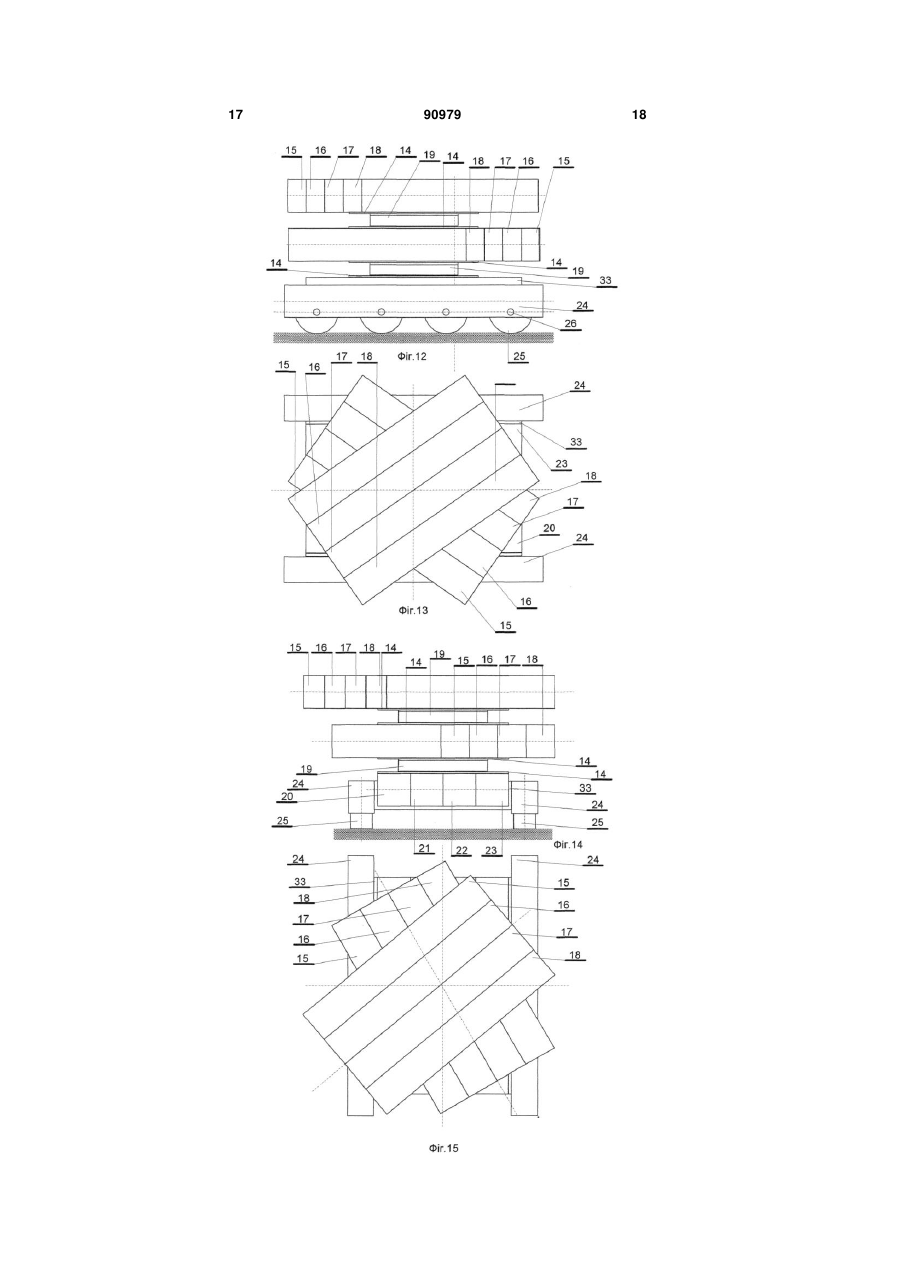
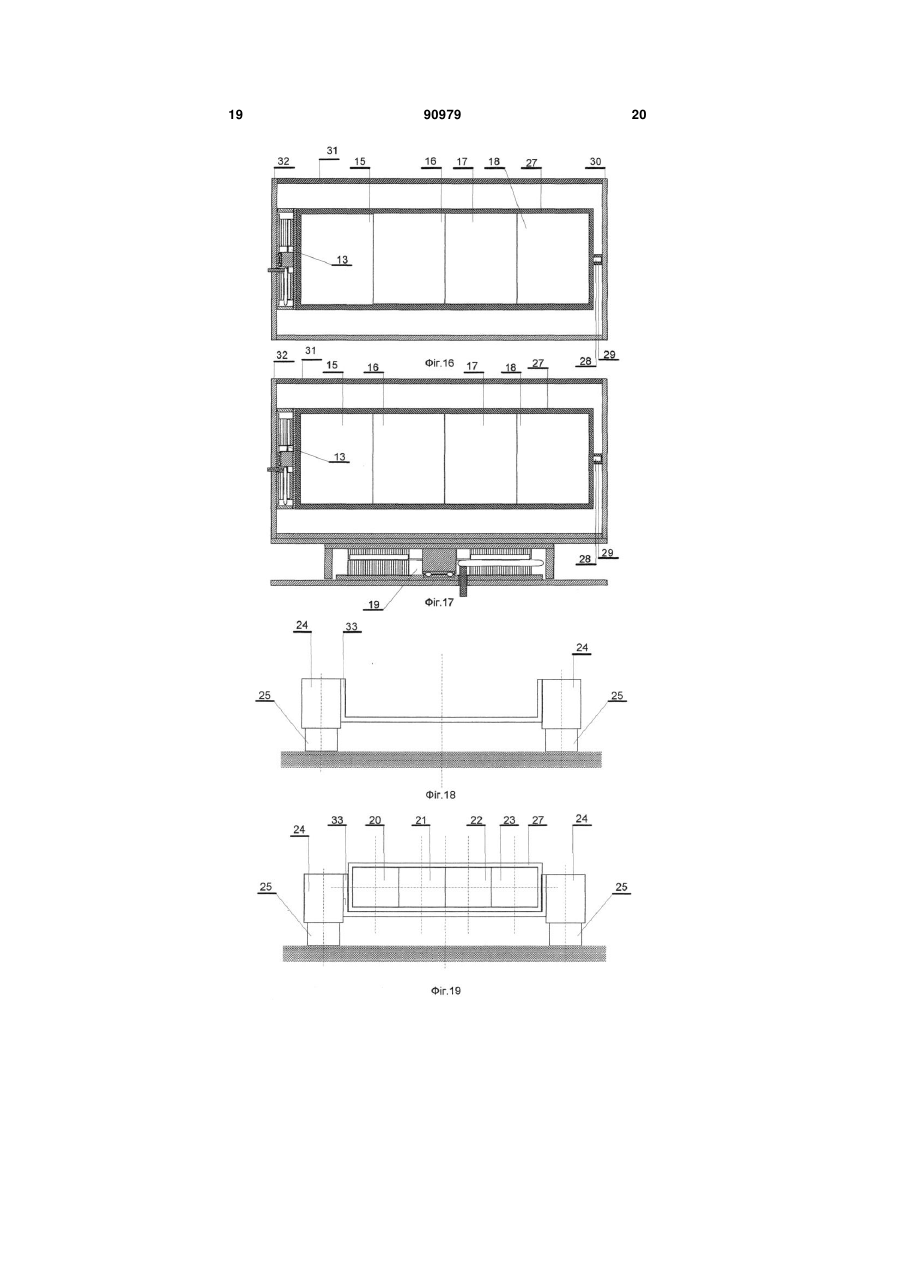
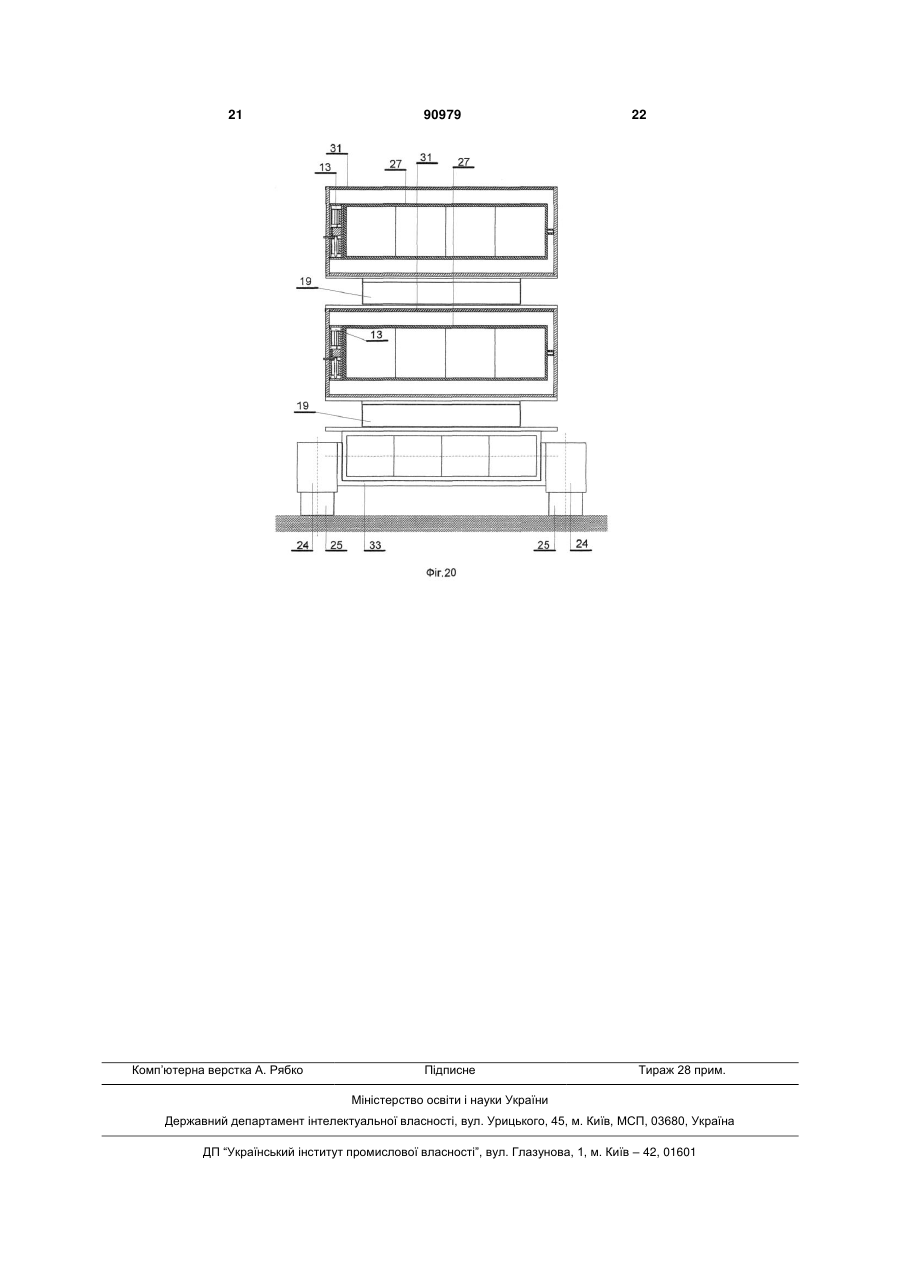
1. Модульно структурований військовий наземний робот з функціональними блоками-модулями повороту, що включає електрохімічні, конденсаторні або комбіновані джерела електричної енергії, її перетворювачі, електромеханічні колісні, гусеничні або колісно-гусеничні рушії, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а так само комплект головного виконавчого устаткування, що включає системи стрілецького і артилерійського озброєння, маніпулятори, блоки-модулі самоліквідації та ін., який відрізняється тим, що він забезпечений комплексом поворотних електромеханічних блоківмодулів горизонтального і вертикального наведення систем озброєння, кожен з яких виконаний у C2 2 (19) 1 3 робототехнічними установками і комплексами подібного типу. Як відомо, військові наземні роботи належать до найбільш сучасного класу пристроїв і комплексів озброєння і військової техніки, що стрімко розвивається. Вони призначені для практичної реалізації значного числа різноманітних бойових завдань, головна з яких полягає в якісному виконанні складного бойового завдання за умови досягнення мінімуму втрат особового складу. При цьому наземні військові роботи для бойових і спеціальних операцій відрізняються постійністю збереження бойового потенціалу незалежно від кліматичних і добових коливань погоди. Очевидно, що вони з постійним ступенем надійності функціонують у будь-який час доби. Цьому новітньому виду військової техніки властиві висока маневреність і можливість вибору зручної позиції, недоступної людині, наприклад, у важкій для дій людини гірської місцевості і під водою, що забезпечує ефект раптового нападу на супротивника з несподіваних напрямів, які представляються ворогові недоступними. Постійно високий ступінь готовності наземного військового робота до активних дій протягом тривалого часу і можливість ефективного застосування наземних військових роботів на полі бою створює у супротивника відчуття постійної тривоги і страху, тоді як у своїх військ з'являється упевненість, що приводить до психологічної стійкості бійців протягом всього часу бойових дій. При цьому наземний військовий робот сприяє значному скороченню проміжку часу від моменту виявлення мети до моменту її повної поразки. Медичні варіанти наземних військових роботів створюють у бійців відчуття упевненості в тому, що їм буде надана своєчасна допомога безпосередньо на полі бою, і вони будуть вчасно звідти евакуйовані для отримання професійного обслуговування. Вельми істотною є та обставина, що наземний військовий робот важко швидко знищити, навіть якщо він виявлений супротивником на полі бою, унаслідок того, що він принципово не здатний проявити свій «неспокій» із-за цього виявлення, властивий людині. Також вельми істотною є та обставина, що наземний військовий робот дозволяє, на відміну від людини, вести спостереження за полем бою в постійному режимі, безперервно повідомляючи достовірну об'єктивну інформацію про поточну зміну бойової обстановки. В даний час наземні військові роботи використовуються для виконання наступних основних завдань: - виявлення, нейтралізація і пророблення проходів через мінні поля і інші перешкоди; - розвідка, спостереження і виявлення боєприпасів, що не розірвалися; - очищення місцевості від боєприпасів, що не розірвалися; - безпосередня вогняна підтримка піхоти в процесі проведення наступальних і оборонних операцій на місцевості і в населених пунктах; 90979 4 - надання допомоги пораненим і винесення їх з поля бою; - запобігання несанкціонованому доступу до тих об'єктів, що охороняються; - матеріально-технічне забезпечення; - дії в заражених і заборонених районах. - проведення диверсійної роботи і ряду інших операцій спеціального призначення. У мирний час невеликі переносні робототехнічні системи плануються до застосування для пошуку і порятунку людей під час землетрусів і інших стихійних лих, а так само в операціях по приведенню у виконання вимог закону. Обставиною принципового значення тут є те, що унаслідок постійного зростання у всьому світі останніми роками числа локальних військових конфліктів, терористичних інцидентів і піратських актів, в які тим або іншим чином виявляються залученими найбільш розвинені в науковотехнічному відношенні країни, практичне використання наземних військових робототехнічних пристроїв, застосування яких значно знижує рівень людських втрат, різко зросло. Завдяки цьому до теперішнього часу вже накопичений великий об'єм теоретичних і експериментальних даних, що відносяться до аналізу безпосереднього застосування військових наземних роботів в реальних бойових і спеціальних операціях. Так, наприклад, відомі військові роботи, описані, наприклад, в опублікованих в Інтернеті російським інформаційним виданням CitCity 0607.11.2007 року матеріалах «Бойові сухопутні роботи» (див. http://www.citcity.ru), які достатньо широко застосовуються розвиненими в технічному відношенні країнами для виконання практично всіх функцій, описаних вище. У цих матеріалах описані американські військові роботи сімейства PackBot, що застосовуються для розмінування, а так само роботи TAGS і REDOWL. У Ізраїлі, Великобританії і Германії розроблені і знайшли військове застосування рухомі гусеничні роботи для розвідки, розмінування і знищення вибухових пристроїв різного типу. Армія США під час бойових дій і поліцейських операцій в Іраку з успіхом використовувала озброєні вогнепальною зброєю малогабаритні гусеничні роботи в наступальних і розвідувальних операціях. Загальна кількість військових роботів, використовуваних армією США в Іраку, вже досягло чотирьох тисяч. На державному рівні розробкою і практичним використанням військових роботів займаються в Росії, Франції, Великобританії і Японії. Як прототип пропонованого модульного військового наземного робота з поворотними блокамимодулями повороту для виконання бойових і спеціальних завдань прийнятий американський робот Talon на гусеничному ходу (див. згадані вище матеріали з CitCity від 06-07.11.2007p.). Аналіз конструктивних особливостей, як прототипу, так і реалізованих до теперішнього часу і описаних в спеціальній літературі і Internet, i наземних військових роботів бойового і спеціального застосування дозволяє зробити висновок про ряд загальних 5 принципових технічних недоліків, властивих цьому специфічному виду військової техніки. До них можна віднести: - унікальність конструктивного виконання, властива як прототипу, так і практично кожному з відомих зразків військових роботів. Це не дозволяє проводити оперативну модернізацію всієї конструкції в цілому; - напрям стрілецької і реактивної зброї наземних військового робота-прототипу у бік потенційних цілей проводиться шляхом безпосередньої орієнтації всього корпусного конструктиву, тобто, поворотом корпусу за допомогою транспортного рушія, що знижує точність стрілянини; - неможливість одночасного придушення два і більш за цілі, що знаходяться на різних напрямах, як з місця, так і під час руху. У основу конструктивних вирішень пропонованого винаходу поставлено завдання усунення недоліків, властивих, на наш погляд, не тільки наземному військовому роботу, вибраному як прототип, але і решті практично всіх відомих до теперішнього часу конструкцій військових роботів. З цією метою авторами справжньої заявки на видачу патенту на конструкцію модульного військового наземного робота з функціональними блоками-модулями повороту запропоновано, поперше, виконати його на основі використання модульного принципу побудови технічних систем. Практична реалізація запропонованого модульного принципу полягає в тому, що пропонований наземний військовий робот повинен бути конструктивно підрозділений на окремі повністю завершені функціональні блоки, кожен з яких призначений для виконання тільки одній основної принципової функції. Всі ці функціональні блоки повинні бути розміщені в механічно жорстких повністю ідентичних по зовнішніх габаритах коробчастих корпусах однієї і тієї ж простої геометричної форми. Очевидно, що це забезпечує максимально щільну упаковку вказаних функціональних блоків, що входять до складу корпусного конструктиву. Функціональні блоки-модулі, описані вище, по суті, є модулями першого, найбільш простого рівня складності (монографія П.Д. Верхопятніцкий, B.C. Латинський Справочник по модульному конструированию радиоэлектронной аппаратуры. - Ленинград.: Судостроение, 1983, - 232с., ил.). Конструктивне об'єднання два і більш функціональних блоків-модулів першого рівня складності є функціональним блоком-модулем другого рівня складнощі. Очевидно, що вони мають збільшений в порівнянні з функціональними модулями першого рівня складності набір функціональних можливостей. Повністю аналогічним чином, конструктивне об'єднання функціональних модулів другого рівня складнощі з функціональними модулями першого рівня складності забезпечує створення функціональних модулів третього рівня складності і так далі На основі повного набору описаних вище функціональних модулів, розташованих в окремих корпусні конструктиви, може бути створений цілий комплекс наземних військових роботів, кожен з яких здатний виконати встановлені завдання від 90979 6 повідно до специфіки конкретної бойової обстановки. Загальний набір функціонально завершених блоків-модулів повинен включати: - енергетичний блок-модуль, що несе джерела електричної енергії електрохімічного (акумулятори електроенергії, паливні елементи і їх комбінації) або накопичувального (швидкозарядженні суперконденсатори) типів; - блок-модуль перетворювачів електричної енергії отримуваною від енергетичного блокумодуля; - блок-модуль датчиків системи тягового електромеханічного приводу; - автономні блоки-модулі електромеханічних тягових рушіїв на колісному, гусеничному або комбінованому ходу; - блоки-модулі датчиків зовнішньої обстановки, прицілів, далекомірів, повітряної розвідки; - блоки-модулі систем озброєння (стрілецьке, ракетне вогнеметне, лазерне і ін.); - блок-модуль системи самоліквідації; - спеціальні блоки-модулі, призначені для виконання обмеженого специфічного круга завдань. По-друге, що є найбільш істотною технічною відмінністю пропонованого модульного військового наземного робота, його запропоновано забезпечити спеціалізованими плоскими електромеханічними функціональними блоками-модулями повороту на основі торцевих регульованих електричних двигунів, що мають високу перевантажувальну здатність за рахунок застосування високоенергетичних постійних магнітів. Активні складові елементи цих торцевих плоских електродвигунів можуть бути жорстко закріплені як безпосередньо на функціональних блоках-модулях, озброєння, так і жорстко прикріплені до прямокутних корпусних пластин поворотних блоків-модулів. Кожен з вказаних пласких електромеханічних поворотних блоківмодулів може бути розміщений між комплектами блоків-модулів стрілецького або реактивного озброєння, які повинні мати можливість взаємного повороту один щодо одного в горизонтальній площині як при стоянці пропонованого модульноструктурованого військового наземного робота, так і при його русі. Функціональні блоки-модулі повороту так само можуть бути використані для наведення стрілецької або артилерійської зброї, якою забезпечений військовий наземний робот у вертикальній площині. З цією метою кожен комплект блоків-модулів озброєння повинен бути закріплений в окремому коробчатому корпусі, до зовнішньої сторони однієї з бічних граней якого прикріплений рухомий активний елемент торцевого електричного двигуна, у свою чергу прикріплений до внутрішньої поверхні другого зовнішнього коробчатого корпусу. На основі цього конструктивного виконання утворюється блок-модуль вищого, другого рівня складнощі в порівнянні з блоками-модулями простої конфігурації. Рівень складності цього блоку-модуля може бути ще більш підвищений, якщо на нижній зовнішній поверхні другого зовнішнього коробчастого корпусу буде жорстко закріплений поворотний 7 блок-модуль горизонтального наведення стрілецької або артилерійської зброї. Таким чином можуть бути утворені блоки-модулі третього рівня складності. На кресленнях, що ілюструють конструктивну суть пропонованого модульний структурованого військового наземного робота з поворотними блоками-модулями, представлені: Фіг.1. Плаский торцевий електричний двигун функціонального блоку-модуля повороту, розріз, вигляд збоку; Фіг.2. Плаский торцевий електричний двигун поворотного блоку-модуля, вигляд зверху; Фіг.3. Магнітопровід статора плоского торцевого електричного двигуна з секціями якірної обмотки, вигляд зверху; Фіг.4. Магнітопровід статора плаского торцевого електричного двигуна з секціями якірної обмотки,, розріз по А-А, вигляд збоку; Фіг.5. Магнітопровід ротора плаского торцевого електричного двигуна з високоенергетичними постійними магнітами, вигляд знизу; Фіг.6. Магнітопровід ротора плаского торцевого електричного двигуна з високоенергетичними постійними магнітами, розріз по В-В, вигляд збоку; Фіг.7. Функціональний блок-модуль повороту пропонованого військового наземного робота, розріз, вигляд збоку; Фіг.8. Функціональний блок-модуль повороту пропонованого військового наземного робота, вигляд зверху; Фіг.9. Конструктив пропонованого військового наземного робота в зборі з двома комплектами озброєння, і двома функціональними блокамимодулями повороту і повним комплектом блоківмодулів енергопостачання, енергоперетворення і управління, вигляд збоку; Фіг.10. Пропонований військовий наземний робот в зборі з автономними колісними електромеханічними транспортними модулями, вигляд збоку; Фіг.11. Пропонований військовий наземний робот в зборі в зборі з автономними колісними електромеханічними транспортними модулями, вигляд спереду; Фіг.12. Пропонований військовий наземний робот при поворотах верхнього і нижнього комплектів блоків-модулів озброєння в горизонтальній площині на рівні кути в протилежні сторони, вигляд спереду; Фіг.13. Пропонований військовий наземний робот при поворотах верхнього і нижнього комплектів блоків-модулів озброєння в горизонтальній площині на рівні кути в протилежні сторони, вигляд зверху; Фіг.14. Пропонований військовий наземний робот при поворотах верхнього і нижнього комплектів блоків-модулів озброєння в горизонтальній площини на різні кути в протилежні сторони, вигляд збоку; Фіг.15. Пропонований військовий наземний робот при поворотах верхнього і нижнього комплектів блоків-модулів озброєння в горизонтальній площини на різні кути в протилежні сторони, вигляд зверху; 90979 8 Фіг.16. Блок-модуль озброєння другого рівня складності з поворотним електричним двигуном вертикального наведення в подовжньому розрізі; Фіг.17. Блок-модуль озброєння третього рівня складності з поворотним двигуном наведення по вертикалі і блоком-модулем повороту в горизонтальній площині; Фіг.18. Блок-модуль другого рівня складнощі у вигляді конструктиву, що включає два автономних колісних електромеханічних транспортних блокумодуля і сполучну монтажну U-подібну пластину, вигляд спереду; Фіг.19. Блок-модуль другого рівня складнощі у вигляді конструктиву, що включає два автономних колісних електромеханічних транспортних блокумодуля і комплект енергетичних і таких, що управляють блоків-модулів, закріплених на сполучній Uподібної пластині, вигляд спереду; Фіг.20. Пропонований військовий наземний робот, що складається з двох блоків-модулів озброєння третього рівня складності по Фіг.17 і транспортному блоку модуля по Фіг.19. Представлений на Фіг.1, 2, 3, 4, 5 і 6 плаский електричний двигун торцевого типу, який використаний для приведення в рух поворотного функціонального блоку-модуля повороту пропонованого модульноструктурованого військового наземного робота, включає дві паралельні пласкі корпусні деталі - нижню круглу основу 1 і верхню круглу кришку 2, на якій закріплено кругове захисне корпусне кільце 3. На круглій нижній основі 1 жорстко укріплений кільцевий стрічковий феромагнітний магнітопровід 4, на верхній частині кільцевої поверхні якого, займаючи її сектор або всю її площу, виконані пази 5. У вказаних пазах 5 або безпосередньо на кільцевій поверхні магнітопровода 4 укладені секції 6 якірної обмотки управління торцевого електричного двигуна поворотного блокумодуля. У нижній круглій основі 1 виконаний отвір 7, що служить для проходу джгута 8 електричних провідників, що сполучають якірну обмотку з джерелом живлення і датчиками системи управління торцевим двигуном. На верхній круглій кришці 2 двигуни жорстко закріплений кільцевий стрічковий феромагнітний магнітопровід 9, на всій нижній зовнішній поверхні якого розміщені рідкоземельні постійні магніти 10 трапецеїдальної форми. Ці постійні магніти 10 створюють основний магнітний потік торцевого двигуна функціонального блокумодуля повороту. У поглибленні центральної частини круглої підстави 1 встановлений опорний підшипник 11, верхня обойма якого закріплена в поглибленні опорного елементу 12, жорстко закріпленого в центрі круглої кришки 2. На Фіг.7 і 8 представлена конструкція функціонального блоку-модуля повороту пропонованого модульноструктурованого військового наземного робота. Верхній і нижній конструктивні елементи 1 і 2 плаоского торцевого електричного двигуна 13 повороту повинні бути жорстко прикріплені до ідентичних верхньої і нижньої прямокутним корпусним пластинам 14 функціонального блоку-модуля повороту. На Фіг.9 представлений приклад комплектації пропонованого модульного військового наземного 9 робота з установкою двох функціональних блоківмодулів горизонтального повороту для двох комплектів систем стрілецького і артилерійського озброєння. Тут між наборами функціональних блоків-модулів 15, 16, 17 і 18 озброєнь і його допоміжного устаткування встановлено два функціональні блоки-модулі 19 повороту так, що до верхньої і нижньої корпусним пластинам 14 верхнього функціонального блоку-модуля повороту прикріплено обидва набори функціональних блоків-модулів 15, 16, 17 і 18 озброєнь і його допоміжного устаткування, а до корпусних пластин 14 нижнього функціонального блоку-модуля повороту прикріплений нижній набір функціональних блоків-модулів 15, 16, 17 і 18 озброєнь і його допоміжного устаткування і набір функціональних модулів енергопостачання і енергоперетворення 20,21, 22 і 23. На Фіг.10 і 11 представлений приклад загального виду пропонованого модульноструктурованого військового наземного робота з установкою двох функціональних блоків-модулів горизонтального повороту для двох комплектів систем стрілецького і артилерійського озброєння, забезпеченого автономними електромеханічними транспортними функціональними блоками-модулями 24, що спираються на колеса 25, які закріплені на осях 26. На Фіг.12 і 13 представлений приклад наведення блоків-модулів озброєння в горизонтальній площині на рівні кути в протилежні сторони, а на Фіг.14 і 15 наведення блоків-модулів озброєння в горизонтальній площині виконане на різні кути так само в протилежні сторони.. З метою підвищення функціональних можливостей пропонованого модульного військового наземного робота з функціональними блокамимодулями повороту запропоновано забезпечити його функціональними блоками-модулями другого рівня складнощі, які дозволяють здійснювати наведення систем озброєння по вертикалі. Для цього, як це показано на Фіг.16, комплект функціональних блоків-модулів 15, 16, 17 і 18 озброєнь і його допоміжного устаткування повинен бути встановлений в коробчастому корпусі 27, який, у свою чергу, з одного боку забезпечений віссю 28, що має можливість обертання в опорі 29. Опора 29 осей 28 закріплена в центрі внутрішньої поверхні бічної пластини 30 зовнішнього коробчастого корпусу 31 функціонального блоку-модуля другого рівня складнощі. У центральній частині внутрішньої поверхні другої бічної пластини 32 жорстко закріплена плаского торцевого електричного двигуна 13, кришка якого жорстко прикріплена до зовнішньої бічної сторони коробчатого корпусу 27. Подальше підвищення функціональних можливостей пропонованого модульного військового наземного робота з функціональними блокамимодулями повороту може бути реалізоване на основі застосування функціональних блоківмодулів третього рівня складності, одна з можливих конструктивних модифікацій якого представ 90979 10 лена на Фіг.17. Тут до нижньої грані коробчатого корпусу 31 функціонального блоку-модуля другого рівня складнощі по Фіг.16 жорстко прикріплена корпусна пластина 14 функціонального блокумодуля повороту, що здійснює наведення озброєння в горизонтальній площині. На Фіг.18 і 19 представлені приклади функціональних блоків-модулів другого і третього рівня складнощі, виконані на основі автономних електромеханічних транспортних блоків-модулів 24. У першому випадку два транспортні блоки-модулі 24 об'єднані в загальний конструктив блоку-модуля за допомогою U-подібної пластини 33. У другому випадку у вказаній U-подібної сполучній пластині 33 закріплений коробчастий корпус 27, в якому встановлені функціональні блоки-модулі 20, 21, 22 і 23. На Фіг.20 представлена конструкція пропонованого модульноструктурованого військового наземного робота з функціональними блокамимодулями повороту, яка виконана на основі його комплектації з трьох функціональних блоківмодулів третього рівня складності, а саме, з двох функціональних блоків-модулів озброєння і одного транспортного функціонального блоку-модуля, що несе систему енергопостачання, енергоперетворення і управління. Пропонований модульний військовий наземний робот з функціональними блоками-модулями повороту працює таким чином. На першому етапі відповідно до отриманого бойового або спеціального завдання з повного набору функціональних модулів, що є в наявності, проводиться збірка пропонованого військового наземного робота. Очевидно, що такий робот в обов'язковому порядку повинен бути укомплектований одним або декількома функціональними блоками-модулями повороту. Перед початком руху робота до місця виконання бойового або спеціального завдання на якірні обмотки 6 управлінь пласких торцевих електричних двигунів 13 і 19 повороту по сигналу системи управління подається постійний струм. Завдяки виниклій електромагнітній взаємодії магнітопроводи статора і ротора торцевих двигунів 13 і 19 жорстко фіксуються один щодо одного під час руху робота. Оператор, що здійснює радіоуправління пропонованим наземним військовим роботом, за допомогою прицілів, що входять в комплект функціональних блоків-модулів 15.18, проводить наведення що є на роботі стрілецької і артилерійської зброї як в горизонтальній площині за наявності тільки функціональних блоків-модулів повороту 19, так і одночасно в горизонтальній і вертикальній площинах за наявності у складі набору модулів функціональних модулів третього рівня складності по Фіг.17. Управління наведенням озброєння за допомогою функціональних блоківмодулів повороту може проводиться і в автоматичному режимі відповідно до заздалегідь встановленою в комп'ютерній системі управління роботом програмою. 11 90979 12 13 90979 14 15 90979 16 17 90979 18 19 90979 20 21 Комп’ютерна верстка А. Рябко 90979 Підписне 22 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюModule-structured military surface robot with functional module blocks of turn
Автори англійськоюPopovichenko Oleksandr Viktorovych, Tolstoi Oleksii Volodymyrovych, Belikov Viktor Tryfonovych, Vasyliev Valerii Valentynovych
Назва патенту російськоюМодульно структурированный военный наземный робот с функциональными блоками-модулями поворота
Автори російськоюПоповиченко Александр Викторович, Толстой Алексей Владимирович, Беликов Виктор Трифонович, Васильев Валерий Валентинович
МПК / Мітки
МПК: F41H 7/00
Мітки: блоками-модулями, наземний, функціональними, структурований, повороту, військовий, модульної, робот
Код посилання
<a href="https://ua.patents.su/11-90979-modulno-strukturovanijj-vijjskovijj-nazemnijj-robot-z-funkcionalnimi-blokami-modulyami-povorotu.html" target="_blank" rel="follow" title="База патентів України">Модульно структурований військовий наземний робот з функціональними блоками-модулями повороту</a>
Модульно структурований військовий наземний робот
Номер патенту: 87777
Опубліковано: 10.08.2009
Автори: Поповіченко Олександр Вікторович, Толстой Олексій Володимирович, Лещенко Олег Іванович, Беліков Віктор Тріфонович
МПК: F41H 7/00
Мітки: структурований, наземний, робот, військовий, модульної
Формула / Реферат:
1. Модульно структурований військовий наземний робот бойового або спеціального застосування, що включає електрохімічні, конденсаторні або комбіновані джерела електричної енергії, її перетворювачі, електромеханічні колісні, гусеничні або колісно-гусеничні рушії, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а так само комплект виконавчих механізмів, зокрема маніпулятори, системи озброєння і...
Здвоєний модульно структурований військовий наземний робот
Номер патенту: 88833
Опубліковано: 25.11.2009
Автори: Толстой Олексій Володимирович, Поповіченко Олександр Вікторович, Беліков Віктор Тріфонович, Лещенко Олег Іванович
МПК: F41H 7/00
Мітки: робот, наземний, здвоєний, військовий, структурований, модульної
Формула / Реферат:
1. Здвоєний модульно структурований наземний військовий робот для ведення бойових і спеціальних операцій, що має необхідний комплект виконавчої апаратури і пристроїв у вигляді електрохімічних або накопичувальних джерел електричної енергії, її перетворювачів, електромеханічних рушіїв колісного, гусеничного або комбінованого типів, набору датчиків, аналізаторів зовнішньої обстановки, маніпуляторів, озброєння з прицілами, який відрізняється тим,...
Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем
Номер патенту: 90969
Опубліковано: 10.06.2010
Автори: Грачьов Микола Миколайович, Беліков Віктор Тріфонович, Васильєв Валерій Валентинович, Поповіченко Олександр Вікторович, Толстой Олексій Володимирович
МПК: F41H 7/00
Мітки: наземний, вертикальним, структурований, військовий, робот, модульної, гвинтовим, підіймачем
Формула / Реферат:
1. Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем, що включає електрохімічні, конденсаторні або комбіновані джерела електричної енергії, її перетворювачі, електромеханічні колісні, гусеничні або колісно-гусеничні рушії, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а так само комплект виконавчих механізмів, зокрема маніпулятори, системи озброєння і...
Модульно структурований військовий наземний робот для бойових і спеціальних операцій
Номер патенту: 88585
Опубліковано: 26.10.2009
Автори: Лещенко Олег Іванович, Васильєв Валерій Валентинович, Поповіченко Олександр Вікторович, Толстой Олексій Володимирович, Беліков Віктор Тріфонович
МПК: F41H 13/00
Мітки: структурований, наземний, військовий, бойових, модульної, операцій, спеціальних, робот
Формула / Реферат:
1. Модульно структурований військовий наземний робот для бойових і спеціальних операцій, що включає розміщені в корпусному конструктиві електрохімічні, конденсаторні або комбіновані джерела електричної енергії, її перетворювачі, електромеханічні колісні, гусеничні або колісно-гусеничні рушії, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а також комплект виконавчих механізмів, зокрема маніпулятори,...
Підводний робот
Номер патенту: 26282
Опубліковано: 10.09.2007
Автори: Родічева Надія Іванівна, Данильченко Ігор Євгенович, Пишнєв Сергій Миколайович, Данильченко Наталя В'ячеславівна
МПК: B63G 8/00
Формула / Реферат:
Підводний робот, що має міцні корпуси, корпус з відеокамерою, рушійні пристрої, корпус з технологічним обладнанням, який відрізняється тим, що окремі конструктивні елементи виконані у вигляді функціональних модулів і з'єднані між собою за допомогою з'єднувального модуля з універсальним вузлом кріплення.
Попередній патент: Повітродувний рушій
Наступний патент: Обертовий віброгранулятор розплавів
Випадковий патент: Робоче колесо відцентрового компресора