Підводний робот
Номер патенту: 26282
Опубліковано: 10.09.2007
Автори: Данильченко Ігор Євгенович, Пишнєв Сергій Миколайович, Родічева Надія Іванівна, Данильченко Наталя В'ячеславівна
Формула / Реферат
Підводний робот, що має міцні корпуси, корпус з відеокамерою, рушійні пристрої, корпус з технологічним обладнанням, який відрізняється тим, що окремі конструктивні елементи виконані у вигляді функціональних модулів і з'єднані між собою за допомогою з'єднувального модуля з універсальним вузлом кріплення.
Текст
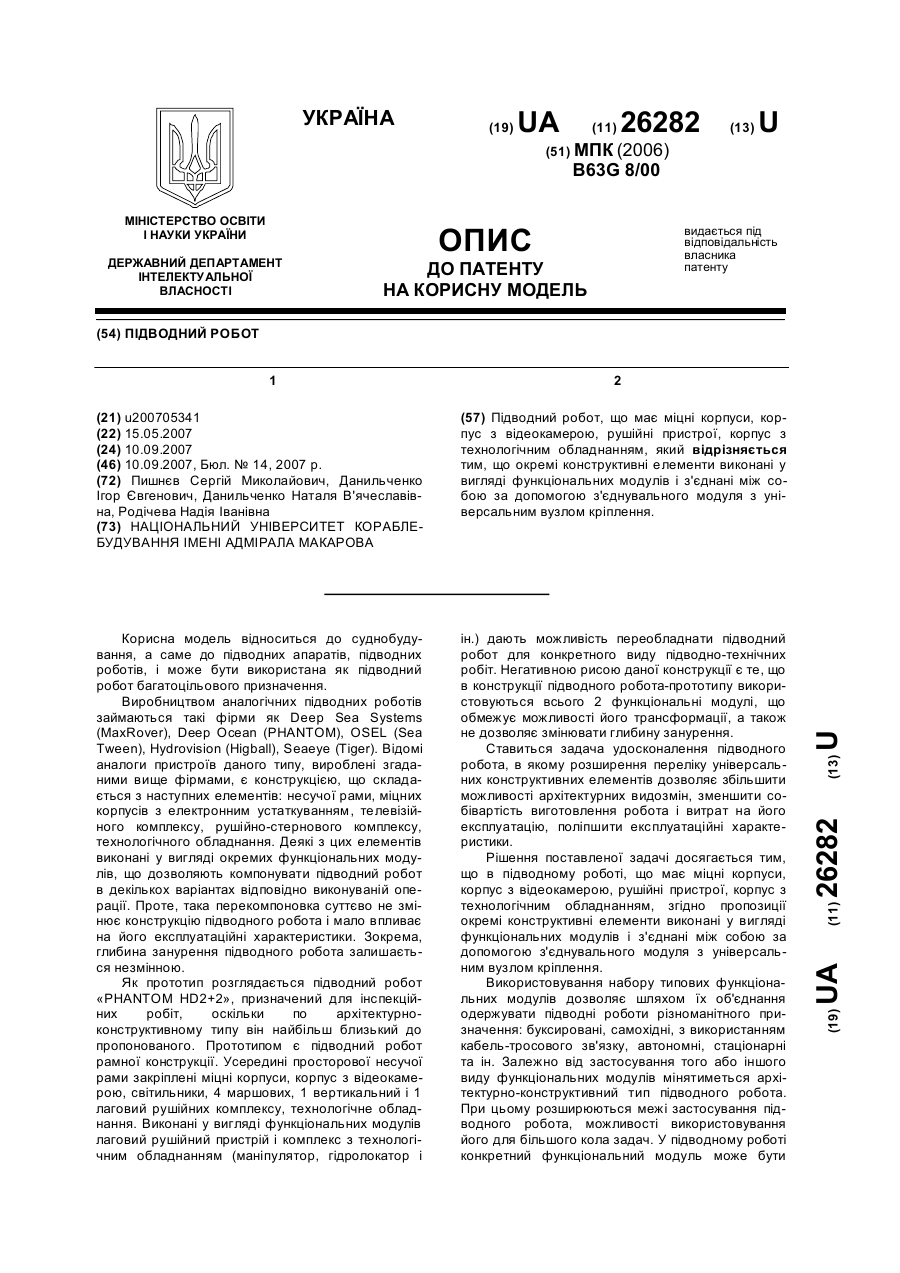
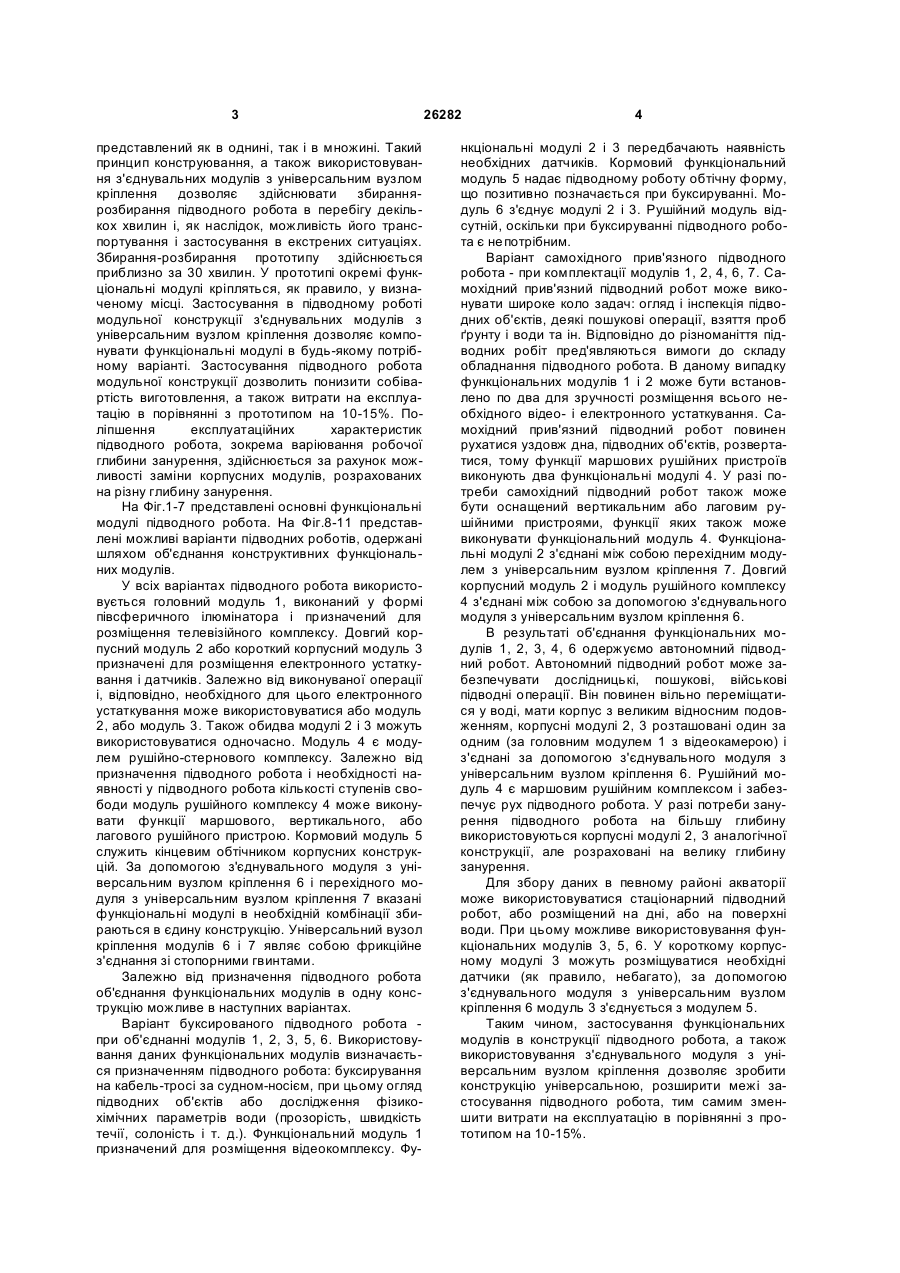
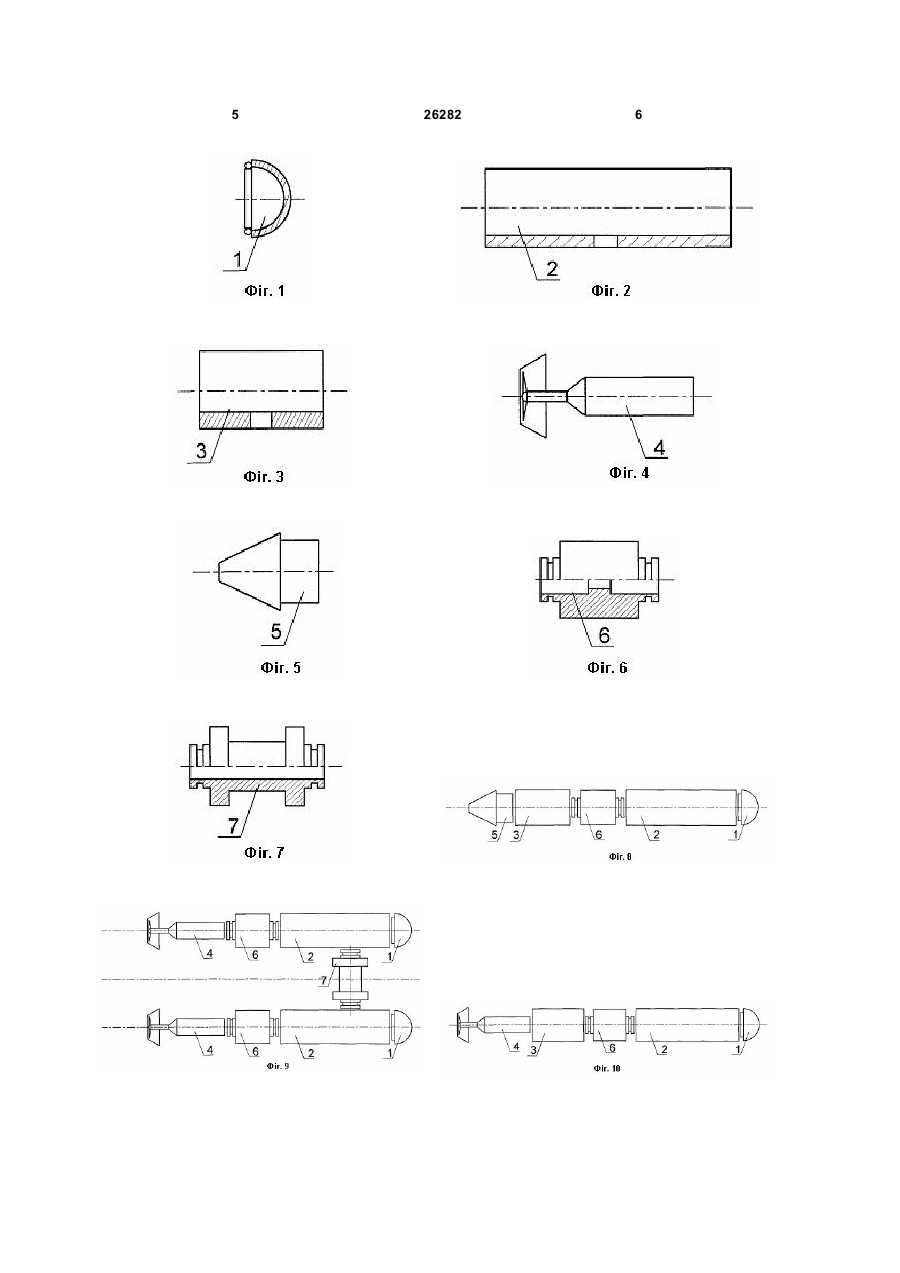
Підводний робот, що має міцні корпуси, корпус з відеокамерою, рушійні пристрої, корпус з технологічним обладнанням, який відрізняється тим, що окремі конструктивні елементи виконані у вигляді функціональних модулів і з'єднані між собою за допомогою з'єднувального модуля з універсальним вузлом кріплення. (19) (21) u200705341 (22) 15.05.2007 (24) 10.09.2007 (46) 10.09.2007, Бюл. № 14, 2007 р. (72) Пишнєв Сергій Миколайович, Данильченко Ігор Євгенович, Данильченко Наталя В'ячеславівна, Родічева Надія Іванівна (73) НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ КОРАБЛЕБУДУВАННЯ ІМЕНІ АДМІРАЛА МАКАРОВА 3 представлений як в однині, так і в множині. Такий принцип конструювання, а також використовування з'єднувальних модулів з універсальним вузлом кріплення дозволяє здійснювати збираннярозбирання підводного робота в перебігу декількох хвилин і, як наслідок, можливість його транспортування і застосування в екстрених ситуаціях. Збирання-розбирання прототипу здійснюється приблизно за 30 хвилин. У прототипі окремі функціональні модулі кріпляться, як правило, у визначеному місці. Застосування в підводному роботі модульної конструкції з'єднувальних модулів з універсальним вузлом кріплення дозволяє компонувати функціональні модулі в будь-якому потрібному варіанті. Застосування підводного робота модульної конструкції дозволить понизити собівартість виготовлення, а також витрати на експлуатацію в порівнянні з прототипом на 10-15%. Поліпшення експлуатаційних характеристик підводного робота, зокрема варіювання робочої глибини занурення, здійснюється за рахунок можливості заміни корпусних модулів, розрахованих на різну глибину занурення. На Фіг.1-7 представлені основні функціональні модулі підводного робота. На Фіг.8-11 представлені можливі варіанти підводних роботів, одержані шляхом об'єднання конструктивних функціональних модулів. У всіх варіантах підводного робота використовується головний модуль 1, виконаний у формі півсферичного ілюмінатора і призначений для розміщення телевізійного комплексу. Довгий корпусний модуль 2 або короткий корпусний модуль 3 призначені для розміщення електронного устаткування і датчиків. Залежно від виконуваної операції і, відповідно, необхідного для цього електронного устаткування може використовуватися або модуль 2, або модуль 3. Також обидва модулі 2 і 3 можуть використовуватися одночасно. Модуль 4 є модулем рушійно-стернового комплексу. Залежно від призначення підводного робота і необхідності наявності у підводного робота кількості ступенів свободи модуль рушійного комплексу 4 може виконувати функції маршового, вертикального, або лагового рушійного пристрою. Кормовий модуль 5 служить кінцевим обтічником корпусних конструкцій. За допомогою з'єднувального модуля з універсальним вузлом кріплення 6 і перехідного модуля з універсальним вузлом кріплення 7 вказані функціональні модулі в необхідній комбінації збираються в єдину конструкцію. Універсальний вузол кріплення модулів 6 і 7 являє собою фрикційне з'єднання зі стопорними гвинтами. Залежно від призначення підводного робота об'єднання функціональних модулів в одну конструкцію можливе в наступних варіантах. Варіант буксированого підводного робота при об'єднанні модулів 1, 2, 3, 5, 6. Використовування даних функціональних модулів визначається призначенням підводного робота: буксирування на кабель-тросі за судном-носієм, при цьому огляд підводних об'єктів або дослідження фізикохімічних параметрів води (прозорість, швидкість течії, солоність і т. д.). Функціональний модуль 1 призначений для розміщення відеокомплексу. Фу 26282 4 нкціональні модулі 2 і 3 передбачають наявність необхідних датчиків. Кормовий функціональний модуль 5 надає підводному роботу обтічну форму, що позитивно позначається при буксируванні. Модуль 6 з'єднує модулі 2 і 3. Рушійний модуль відсутній, оскільки при буксируванні підводного робота є непотрібним. Варіант самохідного прив'язного підводного робота - при комплектації модулів 1, 2, 4, 6, 7. Самохідний прив'язний підводний робот може виконувати широке коло задач: огляд і інспекція підводних об'єктів, деякі пошукові операції, взяття проб ґрунту і води та ін. Відповідно до різноманіття підводних робіт пред'являються вимоги до складу обладнання підводного робота. В даному випадку функціональних модулів 1 і 2 може бути встановлено по два для зручності розміщення всього необхідного відео- і електронного устаткування. Самохідний прив'язний підводний робот повинен рухатися уздовж дна, підводних об'єктів, розвертатися, тому функції маршових рушійних пристроїв виконують два функціональні модулі 4. У разі потреби самохідний підводний робот також може бути оснащений вертикальним або лаговим рушійними пристроями, функції яких також може виконувати функціональний модуль 4. Функціональні модулі 2 з'єднані між собою перехідним модулем з універсальним вузлом кріплення 7. Довгий корпусний модуль 2 і модуль рушійного комплексу 4 з'єднані між собою за допомогою з'єднувального модуля з універсальним вузлом кріплення 6. В результаті об'єднання функціональних модулів 1, 2, 3, 4, 6 одержуємо автономний підводний робот. Автономний підводний робот може забезпечувати дослідницькі, пошукові, військові підводні операції. Він повинен вільно переміщатися у воді, мати корпус з великим відносним подовженням, корпусні модулі 2, 3 розташовані один за одним (за головним модулем 1 з відеокамерою) і з'єднані за допомогою з'єднувального модуля з універсальним вузлом кріплення 6. Рушійний модуль 4 є маршовим рушійним комплексом і забезпечує рух підводного робота. У разі потреби занурення підводного робота на більшу глибину використовуються корпусні модулі 2, 3 аналогічної конструкції, але розраховані на велику глибину занурення. Для збору даних в певному районі акваторії може використовуватися стаціонарний підводний робот, або розміщений на дні, або на поверхні води. При цьому можливе використовування функціональних модулів 3, 5, 6. У короткому корпусному модулі 3 можуть розміщуватися необхідні датчики (як правило, небагато), за допомогою з'єднувального модуля з універсальним вузлом кріплення 6 модуль 3 з'єднується з модулем 5. Таким чином, застосування функціональних модулів в конструкції підводного робота, а також використовування з'єднувального модуля з універсальним вузлом кріплення дозволяє зробити конструкцію універсальною, розширити межі застосування підводного робота, тим самим зменшити витрати на експлуатацію в порівнянні з прототипом на 10-15%. 5 26282 6 7 Комп’ютерна верстка І.Скворцова 26282 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюUndersea robot
Автори англійськоюPyshniev Serhii Mykolaiovych, Danylchenko Ihor Yevhenovych, Danylchenko Natalia Viacheslavivna, Rodicheva Nadia Ivanivna
Назва патенту російськоюПодводный робот
Автори російськоюПышнев Сергей Николаевич, Данильченко Игорь Евгеньевич, Данильченко Наталья Вячеславовна, Родичева Надежда Ивановна
МПК / Мітки
МПК: B63G 8/00
Код посилання
<a href="https://ua.patents.su/4-26282-pidvodnijj-robot.html" target="_blank" rel="follow" title="База патентів України">Підводний робот</a>
Підводний апарат
Номер патенту: 22027
Опубліковано: 10.04.2007
Автори: Дубіна Марина Олександрівна, Галь Анатолій Феодосійович, Бугаєнко Борис Андрійович, Блінцов Володимир Степанович, Штефирца Анна Іллівна
МПК: B63G 8/00
Формула / Реферат:
Підводний апарат, що містить міцний корпус у вигляді порожнистих носової і кормової сфер, послідовно з'єднаних між собою перехідним люком і поміщених у легкий обтічний корпус, і/чи циліндрів зі сферичними кінцевими частинами, а також горизонтальний рушійно-стерновий комплекс, розташований у кормі підводного апарата, який відрізняється тим, що горизонтальний рушійно-стерновий комплекс виконано з одного чи декількох центральних маршових...
Підводний апарат
Номер патенту: 20208
Опубліковано: 15.01.2007
Автори: Штефирца Анна Іллівна, Дубіна Марина Олександрівна, Галь Анатолій Феодосійович
МПК: B63G 8/00
Формула / Реферат:
Підводний апарат, що містить міцний корпус у вигляді порожнистих носової й кормової сфер, послідовно з'єднаних між собою перехідним люком і поміщених у легкий обтічний корпус, і/або циліндрів зі сферичними кінцевими частинами, а також горизонтальний рушійно-стерновий комплекс, розташований у кормі підводного апарата, який відрізняється тим, що горизонтальний рушійно-стерновий комплекс виконано з одного або декількох центральних маршових...
Рятувальний підводний апарат

Номер патенту: 16642
Опубліковано: 15.08.2006
Автори: Галь Анатолій Феодосійович, Дубіна Марина Олександрівна
МПК: B63C 9/00, B63G 8/00, B63B 3/13
Мітки: підводний, рятувальний, апарат
Формула / Реферат:
1. Рятувальний підводний апарат, що містить міцний корпус у вигляді послідовно сполучених порожнистих сфер, поміщених в легкий корпус, а одна з сфер забезпечена основною камерою присоса, розташованою в нижній частині сфери, який відрізняється тим, що забезпечений додатковими бічними камерами присоса.2. Рятувальний підводний апарат за п. 1, який відрізняється тим, що основна камера присоса розташована в центральній сфері міцного...
Підводний апарат з плавцевим рушієм

Номер патенту: 49237
Опубліковано: 16.09.2002
Автори: Бабенко Віктор Віталійович, Поліщук Сергій Володимирович
Мітки: підводний, рушієм, апарат, плавцевим
Формула / Реферат:
Підводний апарат з плавцевим рушієм, в носовій і кормовій частинах якого розміщені електродвигуни поворотного типу, який відрізняється тим, що в корпусі апарата виконані виїмки, в яких встановлені пластини з можливістю їх повороту навколо поздовжньої осі корпусу апарата, а в тілі головного плавцевого рушія додатково розміщено електродвигун, з’єднаний кронштейном з додатковим плавцевим рушієм з можливістю його коливання у площині,...
Підводний планер

Номер патенту: 42202
Опубліковано: 15.10.2001
Автори: Коробов Віталій Ілліч, Поліщук Сергій Володимирович, Бабенко Віктор Віталійович, Мороз Володимир Василійович, Майстер Валентин Іванович
Формула / Реферат:
Підводний планер, який містить корпус з регульованою несучою поверхнею, який відрізняється тим, що остання, з можливістю її повороту на 360°, встановлена на нерухомих частинах несучої поверхні з обох сторін корпусу підводного планера, а складений плавцевий рушій містить стаціонарну та рухомі частини з висувними пластинами, кожна з яких з’єднана з сердечниками соленоїдів.
Попередній патент: Спосіб діагностики біологічної тканини, переважно пухлини головного мозку
Наступний патент: Різьбовий полімерний ковпачок
Випадковий патент: Застосування продувного газу синтезу сечовини у способі синтезу аміаку й сечовини на одній установці й установка для здійснення цього способу