Модульно структурований військовий наземний робот
Номер патенту: 87777
Опубліковано: 10.08.2009
Автори: Толстой Олексій Володимирович, Поповіченко Олександр Вікторович, Беліков Віктор Тріфонович, Лещенко Олег Іванович
Формула / Реферат
1. Модульно структурований військовий наземний робот бойового або спеціального застосування, що включає електрохімічні, конденсаторні або комбіновані джерела електричної енергії, її перетворювачі, електромеханічні колісні, гусеничні або колісно-гусеничні рушії, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а так само комплект виконавчих механізмів, зокрема маніпулятори, системи озброєння і самоліквідації, який відрізняється тим, що кожен функціонально завершений пристрій робота виконаний у вигляді компактного блока-модуля, розміщеного в жорсткому коробчастому корпусі простої геометричної форми, забезпечений закріпленими на ньому елементами взаємного жорсткого механічного кріплення блоків-модулів один до одного і рознімачами електричного сполучення блоків-модулів, причому форми і габаритні розміри корпусів функціональних блоків-модулів виконані такими, щоб забезпечити максимально щільну взаємну упаковку функціональних блоків без застосування окремого корпусу.
2. Модульно структурований військовий наземний робот бойового або спеціального застосування за п. 1, який відрізняється тим, що жорстке механічне кріплення блоків-модулів один до одного забезпечене шляхом застосування фіксаторів на основі високоенергетичних рідкісноземельних постійних магнітів.
3. Модульно структурований військовий наземний робот бойового або спеціального застосування, який відрізняється тим, що функціональні блоки-модулі закріплені в коробчастій монтажній рамі, до якої ззовні жорстко прикріплені електромеханічні модулі тягових рушіїв.
4. Модульно структурований військовий наземний робот бойового або спеціального застосування за пп. 1, 2 і 3, який відрізняється тим, що він забезпечений набором автономних модулів тягових рушіїв.
Текст
1. Модульно структурований військовий наземний робот бойового або спеціального застосування, що включає електрохімічні, конденсаторні або комбіновані джерела електричної енергії, її перетворювачі, електромеханічні колісні, гусеничні або колісно-гусеничні рушії, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а так само комплект виконавчих механізмів, зокрема маніпулятори, системи озброєння і самоліквідації, який відрізняється C2 2 87777 1 3 роботи для розвідки, розмінування і знищення вибухових пристроїв різного типу. Армія США під час бойових дій в Іраку з успіхом використовувала озброєні вогнепальною зброєю малогабаритні гусеничні роботи в наступальних і розвідувальних операціях. На державному рівні розробкою і практичним використанням військових роботів займаються в Росії, Франції, Великобританії і Японії. Як прототип модульно структурованого військового наземного робота для виконання бойових і спеціальних завдань прийнятий американський робот Talon на гусеничному ходу (див. згадані вище матеріали з CitCity від 06-07.11.2007р.). Конструктивний аналіз, як прототипу, так і реалізованих до теперішнього часу і описаних в спеціальній літературі військових роботів бойового і спеціального застосування дозволяє зробити висновок про ряд загальних принципових недоліків, властивих цьому специфічному виду військової техніки. До них можна віднести: - унікальність конструктивного виконання, властива кожному з військових роботів відомих систем, яка не дозволяє проводити оперативну модернізацію всієї конструкції в цілому; - виконання тягового рушія військових роботів у вигляді агрегату, окремі елементи якого монолітно вбудовані в корпус робота; - практична відсутність уніфікації окремих вузлів і систем, яка істотно знижує темпи прогресу в цій області військової техніки. У основу конструктивних вирішень винаходу, який пропонується, поставлено завдання усунення недоліків, властивих, на наш погляд, як прототипу, так і всім відомим до теперішнього часу конструкціям військових роботів. З цією метою нами запропоновано використовувати при створенні військових рухомих наземних роботів модульний принцип побудови технічних систем. Для практичної реалізації запропонованого модульного принципу наземний військові робот повинен бути конструктивно розділений на окремі повністю завершені функціональні блоки, кожен з яких призначений для виконання однієї основної принципової функції. Кожен такий функціональний блок повинен бути розміщений в механічно жорсткому коробчастому корпусі простої геометричної форми, забезпеченому елементами жорсткого механічного кріплення функціональних блоків один до одного практично без зазорів. Завдяки наявності елементів жорсткого механічного кріплення окремих блоків-модулів один до одного і жорсткості коробчастих корпусів цих функціональних елементів модульно структурованого військового наземного робота, якій пропонується, в результаті монтажу робота утворюється практично монолітний жорсткий конструктив, який не має потреби в наявності спеціального окремого корпусу. Загальний набір функціонально завершених блоків-модулів повинен включати: - енергетичний блок-модуль, що несе джерела електричної енергії електрохімічного (акумулятори електроенергії паливні елементи і їх комбінації) 87777 4 або накопичувального (швидкозарядні суперконденсатори) типів; - блок-модуль перетворювачів електричної енергії отримуваною від енергетичного блокумодуля; - блок-модуль давачів системи тягового електромеханічного приводу; - автономні блоки-модулі електромеханічних тягових рушіїв на колісному, гусеничному або комбінованому, колесно-гусенічному ході; - блоки-модулі давачів зовнішньої обстановки, прицілів далекомірів, повітряної розвідки і ін.; - блоки-модулі систем озброєння (стрілецьке, ракетне вогнеметне, лазерне і ін.) - блок-модуль системи самоліквідації; - спеціальні блоки-модулі, призначені для виконання обмеженого специфічного круга завдань. Для спрощення конструкції пристрою, що забезпечує жорстку взаємну фіксацію функціональних блоків-модулів один щодо одного запропоновано використовувати фіксуючий механізм, виконаний на основі застосування як фіксуючіх елементів високоенергетичних рідкоземельних постійних магнітів, завдяки яким різко спрощується конструкція фіксуючого механізму і збільшується сила взаємного тяжіння корпусів блоків-модулів один до одного. Функціональні блоки-модулі наземного військового робота бойового або спеціального застосування можуть бути виконані без наявності елементів їх взаємної фіксації один щодо одного. В цьому випадку вони фіксуються на спеціальній монтажній рамі, до якої жорстко прикріплені електромеханічні модулі тягових рушіїв. З метою розширення функціональних можливостей пропонованого модульно структурованого військового робота бойового і спеціального призначення запропоновано забезпечити його набором автономних електромеханічних тягових модулів, кожен їх яких повинен оптимально відповідати специфіці зовнішніх умов, в яких передбачається використовувати такий робот. На кресленнях, що ілюструють конструктивну суть пропонованого модульно структурованого наземного військового робота бойового і спеціального призначення, представлені: Фіг.1 - Коробчастий каркас блоку-модуля військового робота; Фіг.2 - Пластини, які створюють грані блокумодуля; Фіг.3 - Вигляд збоку енергетичного блокумодуля джерел електричній енергії при знятій бічній пластині корпусу модуля; Фіг.4 - Вигляд збоку блоку-модуля давачів зовнішньої обстановки при знятій бічній пластині корпусу модуля; Фіг.5 - Вигляд збоку блоку-модуля маніпулятора при знятій бічній пластині корпусу модуля; Фіг.6 - Вигляд збоку блоку-модуля колісного електромеханічного рушія при знятій бічній пластині корпусу модуля; Фіг.7 - Вигляд збоку блоку-модуля гусеничного електромеханічного рушія при знятій бічній пластині корпусу модуля; 5 Фіг.8 - Вигляд збоку блоку-модуля колісногусеничного електромеханічного рушія при знятій бічній пластині корпусу модуля; Фіг.9 - Ізометрична проекція однієї з пластин Фіг.2 з хрестоподібними пазами для розміщення постійних магнітів взаємної фіксації блоківмодулів; Фіг.10 - Ізометрична проекція однієї з пластин Фіг.2 з розміщенням двох пазів для розміщення постійних магнітів взаємної фіксації блоків-модулів під прямим кутом; Фіг.11 - Подовжній розріз постійного магніту, що фіксує блоки-модулі; Фіг.12 - Загальний вигляд збоку постійного магніту, для взаємній фіксації блоків-модулів друг відносно друга; Фіг.13 - Загальний вигляд збоку пропонованого колісного модульно структурованого безкорпусного військового робота забезпеченого маніпулятором; Фіг.14 - Загальний вигляд збоку пропонованого колісного модульно структурованого військового робота, забезпеченого коробчастим корпусом і маніпулятором; Фіг.15 - Загальний вигляд збоку гусеничного модульно структурованого безкорпусного військового робота із стрілецьким озброєнням при знятті бічних кришок зі всіх блоків-модулів. Кожен з блоків-модулів, що входять в конструктивний склад пропонованого модульно структурованого наземного військового робота бойового і спеціального призначення, виконаний, наприклад, у вигляді прямокутного паралелепіпеда, що має коробчастий каркас, представлений на Фіг.1. Прямокутні жорсткі бічні підстави 1 цього каркаса жорсткими стрижнями 2, утворюючи коробчастий паралелепіпед, зовнішні поверхні якого можуть бути закриті плоскими пластинами 3, набір яких представлений на Фіг.2. При цьому окремі функціональні блоки-модулі пропонованого військового робота повинні бути закриті пластинами 3 з боку всіх шести граней, завдяки чому може бути досягнута повна герметичність функціонального блокумодуля. Ряд функціональних блоків-модулів, як, наприклад, блоки-модулі маніпуляторів, давачів зовнішньої обстановки і прицільних пристосувань, озброєння, електромеханічних рушіїв і деякі інші блокимодулі принципово не допускають закриття зі всіх шести сторін. Так, блок-модуль стрілецької зброї повинен бути відкритий, як мінімум, у напрямі передбачуваної стрілянини, тобто, спереду. Блок-модуль давачів зовнішньої обстановки може бути відкритий з боку двох або трьох граней, а блок-модуль вертикальної розвідки повинен мати відкритою верхню грань. На Фіг.3, 4 і 5 представлений ряд прикладів виконання блоків-модулів. На Фіг.3 представлений при знятій бічній пластині енергетичний блокмодуль, де джерела електричної енергії 4 компактно жорстко закріплені в коробчатому каркасі блоку-модуля, який з боку всіх шести граней захищений від зовнішніх дій пластинами 3. Енергетичний блок-модуль має контактні рознімачи для електри 87777 6 чного з'єднання зі всіма зовнішніми споживачами електричної енергії. Вказані контактні рознімачи на Фіг.1, рівно, як і на інших кресленнях, не показані. Блок-модуль, який представлений на Фіг.4, несе давачи зовнішньої обстановки і тому виконаний відкритим з однією із сторін, в даному випадку, з лівою. Давачі 5 зовнішньої обстановки розміщені горизонтально. Блок-модуль, який показаний на Фіг.5, є одним з модулів виконавчих механізмів військового робота, яким в даному випадку телескопічний маніпулятор 6, забезпечений схопом 7. Очевидно, що цей блок-модуль в обов'язковому порядку повинен бути відкритий з боку схопа 7, тобто, зліва. На Фіг.6, 7 і 8 показані конструктивні схеми блоків-модулів тягових електромеханічних рушіїв, починаючи з тягового колісного рушія. Такі блокимодулі повинні бути повністю відкриті знизу для забезпечення хорошого механічного контакту з опорною поверхнею. У основу електромеханічних тягових рушіїв покладений принцип прямого, безпосереднього електроприводу, який полягає в повному усуненні з складу приводу проміжних передач будь-якого типу. У військовому роботі, що пропонується, це досягнуто завдяки застосуванню відомих конструктивних схем приводу, що базуються на тому, що приводні тягові електричні двигуни безпосередньо вбудовуються в опорні колеса, а на їх ротори, що обертаються зовні статорів, насаджуються на обіддя опорних коліс. Такі схеми вже широко використовуються в приводах легкових автомобілів і, природно, не можуть служити предметом цієї патентної заявки. Проте, саме така система безпосереднього електричного приводу забезпечила можливість пропозиції нами новій концепції автономного приводного модуля, завдяки якій один і той же корпусний конструктив може бути забезпечений декількома блоками-модулями тягових електромеханічних рушіїв, вибираними в ході монтажу модульно структурованого військового робота залежно від умов майбутньої експлуатації. Колісний тяговий електромеханічний блокмодуль, який представлений на фіг.6, має коробчастий корпус 8, що несе по краях подовжні балки 9, в яких виконані опори 10 тягових коліс 11, усередині яких знаходяться вбудовані тягові електричні двигуни, на фіг.6 не показані. З метою кращої ілюстрації конструкції цього блоку-модуля він зображений у вигляді збоку із знятою бічною кришкою, що дало можливість показу подовжніх балок 9. У тяговому електромеханічному блоці-модулі гусеничної конструкції, який представлений на Фіг.7, на тягових ведучих колесах 12 розміщені гусеничні стрічки 13, на яких опирається при русі модульно структурований військовий наземний робот, що пропонується. На Фіг.8 показаний комбінований варіант електромеханічного тягового блоку-модуля, що має колісний привід на базі опорних коліс 11 і гусеничний привід з ведучими колесами 12 і гусеницями 13. Блоково-модульна конструкція військового наземного робота, якій пропонується, дозволяє змо 7 нтувати монолітний корпусний конструктив, не удаючись до використання спеціального окремого, загального для всього комплексу блоків-модулів корпусу. Для цього в модульно структурованому наземному військовому роботі, якій пропонується, застосовані магнітні фіксуючі механізми, засновані на застосуванні високоенергетичних постійних магнітів. З цією метою запропоновано застосувати феромагнітні плоскі пластини 3, використовувані при монтажі функціональних блоків, з відштампованими на їх поверхнях пазами 14 хрестоподібної і кутової форми (див., відповідно, Фіг.9 і 10). У них при монтажі закладаються високоенергетичні постійні магніти 15, показані на Фіг.11 і 12. Для зручності монтажу на цих магнітах жорстко закріплені монтажні головки 16, що мають отвір з різьбленням 17, завдяки якому постійний магніт легко з'єднується з монтажним стрижнем, на кресленнях справжніх матеріалів не показаним. На Фіг.13 показаний приклад безкорпусної компоновки блоками-модулями наземного військового робота. Робот укомплектований сім'ю блоками-модулями, серед яких енергетичний блокмодуль 18, блок-модуль 19 перетворювачів напруги, блок-модуль 20 давачів системи електроприводу, блоки-модулі: 21 - давачів зовнішньої обстановки, 22 - бортового комп'ютера, 23 маніпулятора з схопом 7, 24 - тяговий гусеничний електромеханічний. Всі корпусні блоки-модулі жорстко фіксовані один щодо одного високоенергетичними постійними магнітами 15. На Фіг.14 представлена компоновка модульно структурованого військового наземного робота на основі зовнішнього коробчастого корпусу 25, до якого із зовнішнього боку жорстко прикріплений тяговий колісний блок-модуль 26. На Фіг.15 представлений приклад компоновки військового наземного робота, що пропонується, для безпосередньої бойової підтримки піхоти при наступальних і оборонних операціях. Тут, крім енергетичного блоку-модуля 18 блоків-модулів: 19 - перетворювачів напруги, 21 - давачів зовнішньої обстановки і прицілів, 22 - бортового комп'ютера і 24 - тягового гусеничного, є блоки-модулі: 27 - системи стрілецького озброєння 28 з магазином зброї 29 і 30 - повітряної розвідки із злітним модулем 31. Модульно структурований військовий наземний робот для бойового і спеціального застосування, що пропонується, працює таким чином. 87777 8 З номенклатури функціональних блоківмодулів, що є в наявності, повинен бути вибраний такий їх комплект, який повною мірою здатний забезпечити виконання наміченого об'єму бойових або спеціальних завдань, для реалізації яких призначений модульно структурований наземний робот, що пропонується. При цьому особливу увагу слід звернути на підбір автономного електромеханічного тягового блоку-модуля 24, який в максимальному ступені повинен відповідати дорожнім умовам майбутньої роботи. На складальному стенді, який на малюнках, що ілюструють суть пропонованого винаходу, не показаний, в повній відповідності з технологічною інструкцією проводиться монтаж модульно структурованого наземного військового робота з використанням для жорсткої фіксації функціональних блоків-модулів, наприклад, високоенергетичних постійних магнітів 15 при безкорпусному виконанні, або зовнішнього коробчастого корпусу 25. Після проведення монтажу вказаного модульно структурованого військового робота проводяться пуско-налагоджувальні роботи, що забезпечують його придатність для виконання всього комплексу завдань, передбачених умовами його майбутнього функціонування. Як приклад, розглянемо функціонування після монтажу і проведення пуско-налагоджувального циклу безкорпусного модульно структурованого бойового робота, зображеного на Фіг.15. Керований, наприклад, оператором ззовні бойовий робот просувається на задану бойову позицію, використовуючи для цього давачі зовнішньої обстановки 5 і злітний модуль 31 повітряної розвідки, дані яких передаються операторові на командний пункт, на кресленнях не показаний. При необхідності, використовуючи блок-модуль 27 стрілецького озброєння 28, що має магазин 29, проводиться ураження цілей, встановлених розвідкою. Після виконання бойового завдання військовий наземний робот по команді зовнішнього оператора повертається до місця базування, де проводиться необхідний об'єм технічного обслуговування і поповнення боєзапасу. Повністю аналогічним чином працюють зібрані з іншого набору блоків-модулів змінені модифікації модульно структурованих наземних військових роботів, призначені для реалізації зміненого в порівнянні з розглянутим вище комплексом бойових або спеціальних завдань. 9 87777 10 11 Комп’ютерна верстка М. Мацело 87777 Підписне 12 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюModule-structured military surface robot
Автори англійськоюBelikov Viktor Tryfonovych, Leschenko Oleh Ivanovych, Popovichenko Oleksandr Viktorovych, Tolstoi Oleksii Volodymyrovych
Назва патенту російськоюМодульно структурированный военный наземный робот
Автори російськоюБеликов Виктор Трифонович, Лещенко Олег Иванович, Поповиченко Александр Викторович, Толстой Алексей Владимирович
МПК / Мітки
МПК: F41H 7/00
Мітки: військовий, структурований, наземний, модульної, робот
Код посилання
<a href="https://ua.patents.su/6-87777-modulno-strukturovanijj-vijjskovijj-nazemnijj-robot.html" target="_blank" rel="follow" title="База патентів України">Модульно структурований військовий наземний робот</a>
Підводний робот
Номер патенту: 26282
Опубліковано: 10.09.2007
Автори: Родічева Надія Іванівна, Данильченко Ігор Євгенович, Данильченко Наталя В'ячеславівна, Пишнєв Сергій Миколайович
МПК: B63G 8/00
Формула / Реферат:
Підводний робот, що має міцні корпуси, корпус з відеокамерою, рушійні пристрої, корпус з технологічним обладнанням, який відрізняється тим, що окремі конструктивні елементи виконані у вигляді функціональних модулів і з'єднані між собою за допомогою з'єднувального модуля з універсальним вузлом кріплення.
Спосіб керування процесом видобування вугілля у шахті та модульно-адаптивна прогностична система для його здійснення
Номер патенту: 83927
Опубліковано: 26.08.2008
Автори: Вінарик Анатолій Абрамович, Сірченко Володимир Миколайович, Сіненко Віктор Васильович, Мухін Євген Петрович, Курносов Григорій В'ячеславович, Кузьміч Олег Юрійович, Гріньов Володимир Герасимович, Краснік Вячеслав Григорович, Курносов Вячеслав Григорович, Мухін Петро Євгенович, Дубов Євген Дмитрович, Сіроткін Олександр Арнольдович, Красік Яків Львович, Красік Павло Ігоревич
МПК: E21C 35/24, E21D 23/12, E21F 17/18
Мітки: видобування, шахті, прогностична, здійснення, керування, вугілля, процесом, система, модульно-адаптивна, спосіб
Формула / Реферат:
1. Спосіб керування процесом видобування вугілля у шахті, який полягає в автоматизації, керуванні і контролі стану об'єктів шахти, діагностиці стану виконання технологічних процесів та оцінці позаштатних режимів роботи об'єкта, видачі інформації на пульт диспетчера, оперативному втручанні в роботу обладнання при виникненні позаштатних ситуацій, контролі проходження команд керування і генерації сигналів тривоги при невиконанні останніх та...
Промисловий робот
Номер патенту: 67181
Опубліковано: 15.06.2004
Автори: Бергер Євгеній Емильович, Осадчий Володимир Степанович, Бергер Еміль Григорович
МПК: B25J 11/00
Мітки: промисловий, робот
Формула / Реферат:
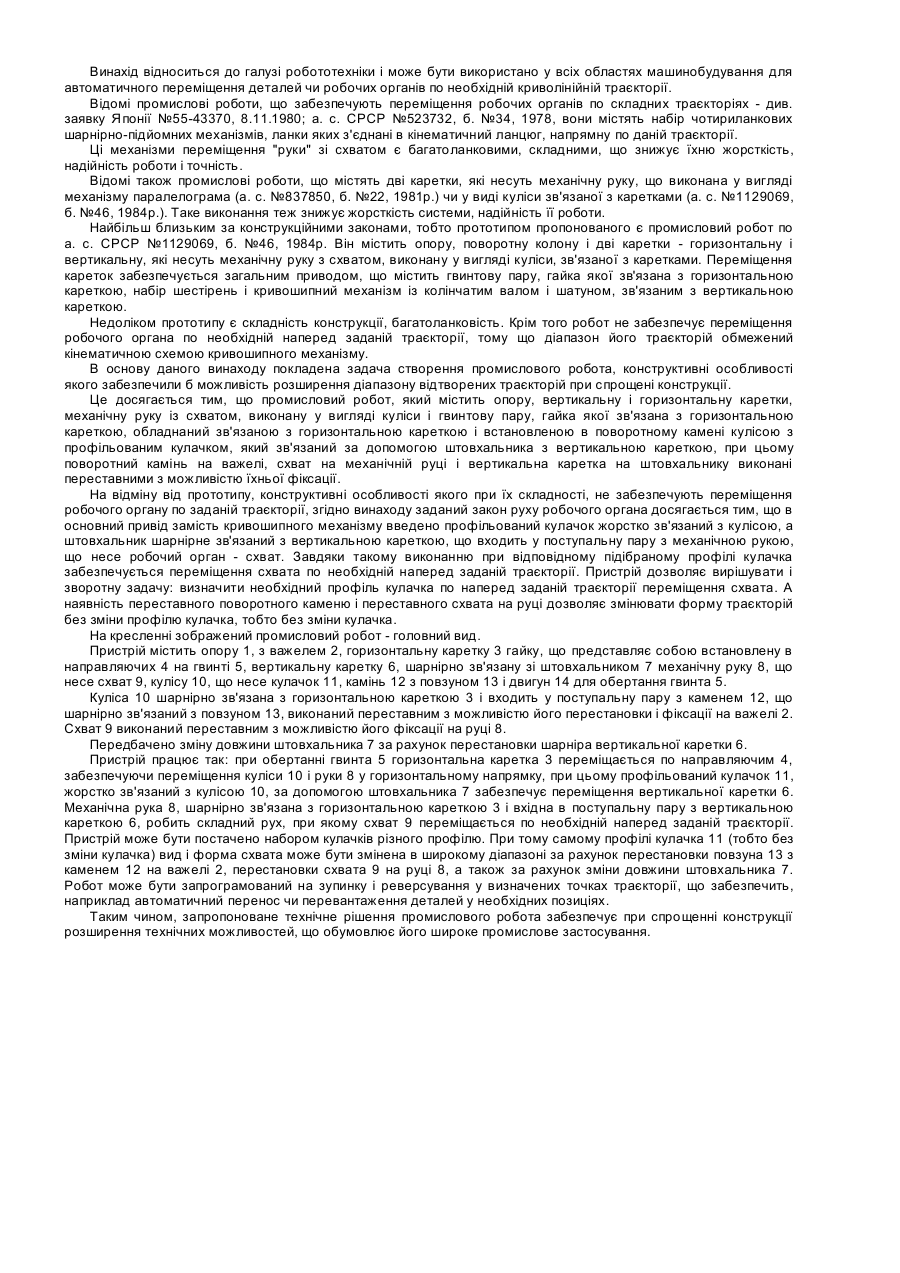
Промисловий робот, що містить опору, вертикальну і горизонтальну каретки, механічну руку із схватом, виконану у вигляді куліси, і гвинтову пару, гайка якої зв'язана з горизонтальною кареткою, який відрізняється тим, що він обладнаний зв'язаною з горизонтальною кареткою і встановленою в поворотному камені кулісою з профільованим кулачком, який зв'язаний за допомогою штовхача з вертикальною кареткою, при цьому поворотний камінь на важелі, схват...
Військовий рекультиватор грунту
Номер патенту: 3830
Опубліковано: 15.12.2004
Автори: Гаврилов Сергій Леонідович, Грибачов Михайло Васильович, Яблоков Володимир Васильович, Орел Володимир Володимирович, Стужук Петро Іванович
МПК: B09B 3/00, B08B 7/04, B08B 13/00
Мітки: рекультиватор, грунту, військовий
Формула / Реферат:
Військовий рекультиватор грунту, що містить рухому основу та різальний інструмент, при цьому різальний інструмент встановлений на рухомій основі, який відрізняється тим, що містить форсунки, теплообмінники, підігрівник, нагнітач, насос, бак і каток, які встановлено на рухомій основі, при цьому одна частина форсунок приєднана до виходу вторинного контуру першого теплообмінника, вхід якого з'єднаний з виходом нагнітача, друга частина форсунок...
Промисловий робот
Номер патенту: 27488
Опубліковано: 15.09.2000
Автор: Малетті Енріко
МПК: B25J 9/10, B21D 43/04
Мітки: робот, промисловий
Текст:
...на нём два двигателя с понижающими передачами, соединённые с ними два манипулятора с возможностью вращения вокруг первой и второй осей, причём оси параллельны и расположены на расстоянии одна от другой, два предплечья, шарнирно сочленённые одними концами с манипуляторами с возможностью вращения вокруг третьей и четвёртой осей, параллельных первой и второй осям вращения манипуляторов, и шарнирно сочленённые противоположными концами с...
Попередній патент: Спосіб керування роботою адаптивних вібраційних технологічних машин
Наступний патент: Планетарно-фрикційна коробка швидкостей
Випадковий патент: Застосування етексилату дабігатрану, необов'язково у формі фармацевтично прийнятної солі, для запобігання інсульту у пацієнта, що страждає від миготливої аритмії