Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем
Номер патенту: 90969
Опубліковано: 10.06.2010
Автори: Толстой Олексій Володимирович, Беліков Віктор Тріфонович, Поповіченко Олександр Вікторович, Васильєв Валерій Валентинович, Грачьов Микола Миколайович

Формула / Реферат
1. Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем, що включає електрохімічні, конденсаторні або комбіновані джерела електричної енергії, її перетворювачі, електромеханічні колісні, гусеничні або колісно-гусеничні рушії, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а так само комплект виконавчих механізмів, зокрема маніпулятори, системи озброєння і самоліквідації, який відрізняється тим, що на його передній половині встановлений вертикальний гвинтовий підіймач, що складається з жорстко закріпленого на рамі робота приводного вертикального електричного двигуна, на роторі якого безпосередньо закріплений вертикальний ходовий гвинт, дві жорстко закріплені на рамі вертикальні напрямні, і рухомої горизонтальної вантажної платформи, що несе комплект розміщених в один шар функціональних блоків-модулів, на якій жорстко закріплена гайка гвинтової передачі, причому на задній половині рами-робота так само в один шар встановлені функціональні блоки-модулі систем енергопостачання, енергоперетворення і управління.
2. Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем за п. 1, який відрізняється тим, що для приводу горизонтальної підйомної платформи застосована прецизійна гвинтова передача типу "гвинт - гайка качання".
3. Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем за пп. 1 і 2, який відрізняється тим, що приводний вертикальний електричний двигун встановлений на осі симетрії передньої половини рами-робота, а дві вертикальні напрямні рухомої горизонтальної вантажної платформи жорстко закріплені симетрично в напрямі, поперечному руху, в передній або задній частинах передньої половини рами-робота.
4. Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем за пп. 1 і 2, який відрізняється тим, що дві вертикальні напрямні рухомої горизонтальної вантажної платформи жорстко закріплені симетрично уздовж подовжньої осі робота по обидві сторони відносної осі вертикального приводного електричного двигуна.
Текст
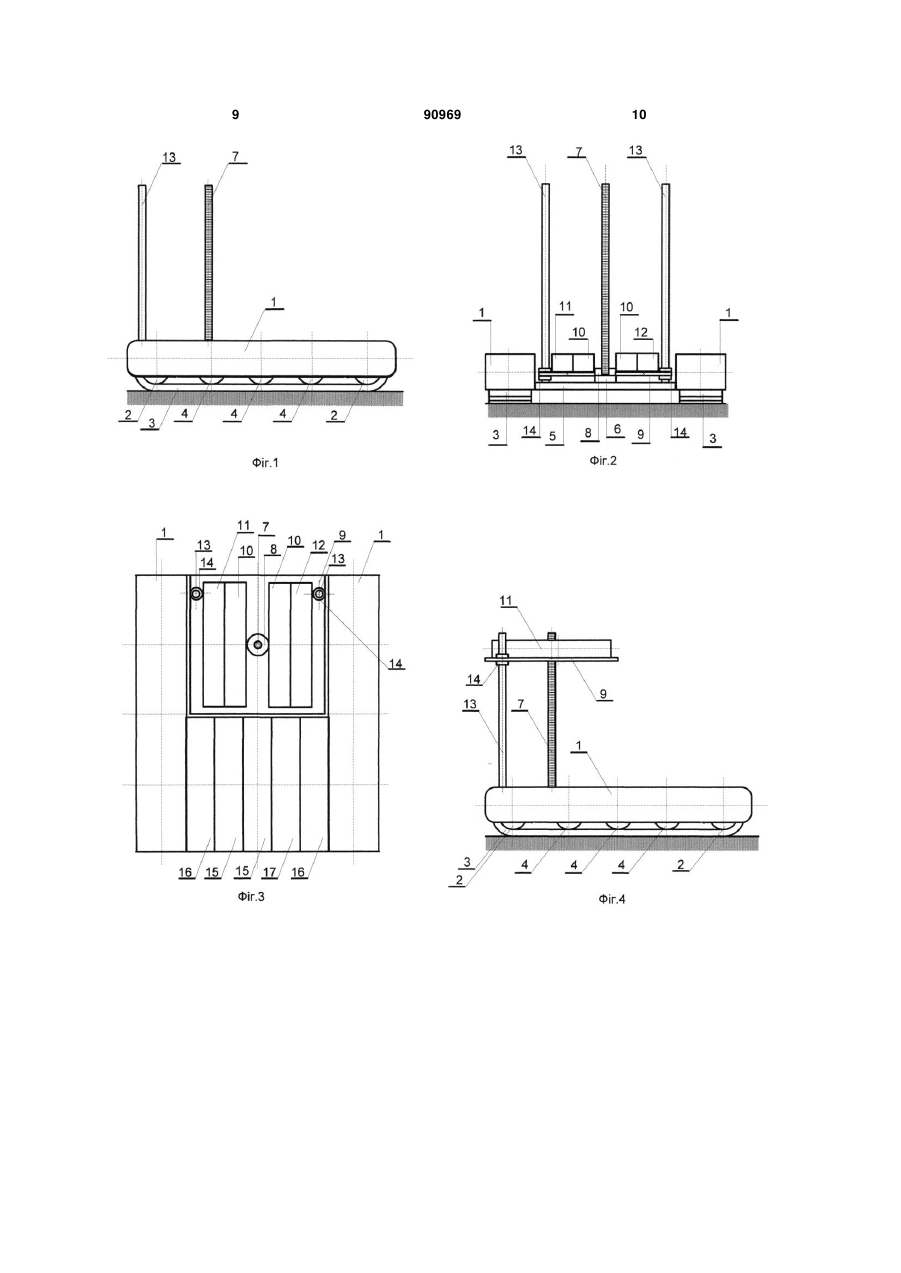
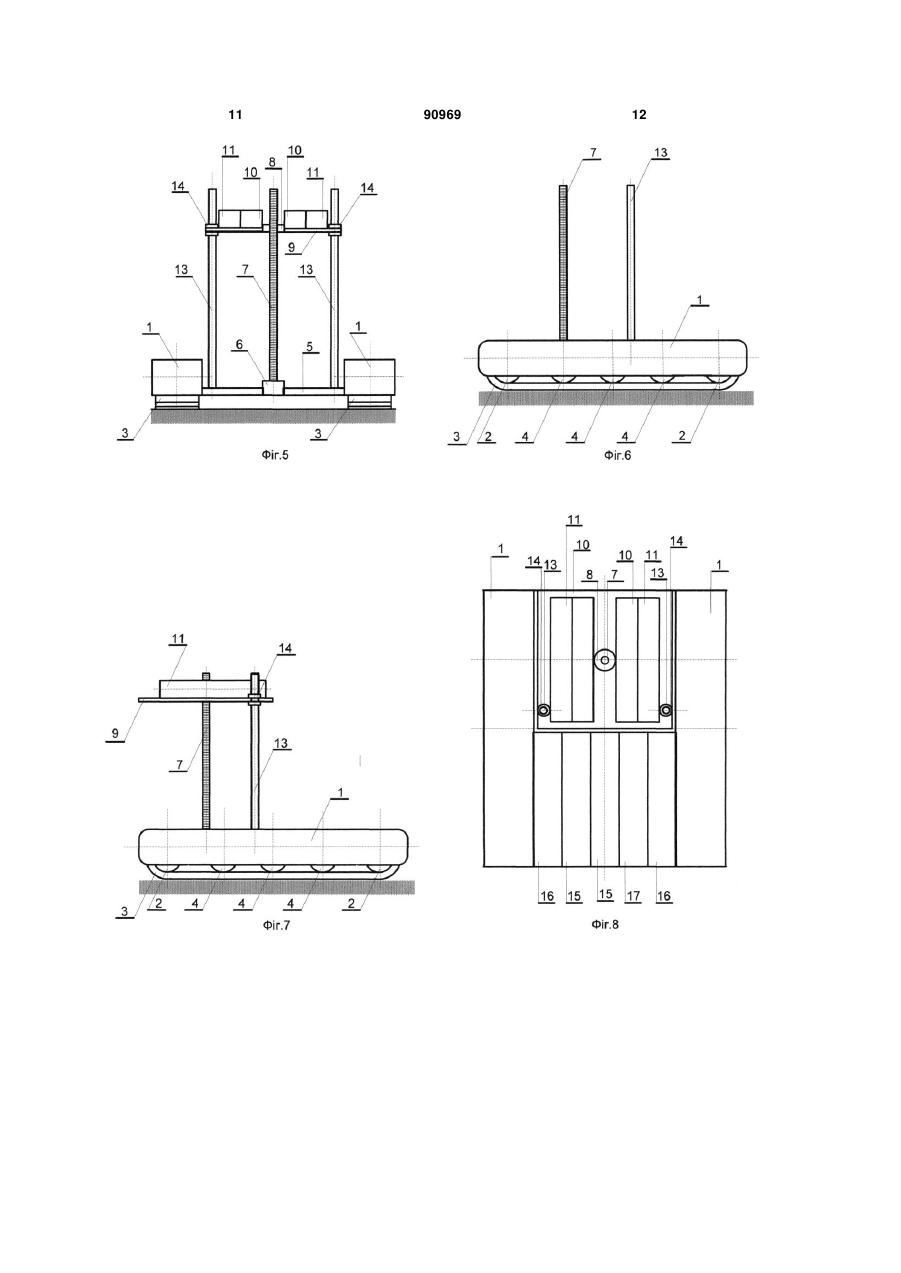
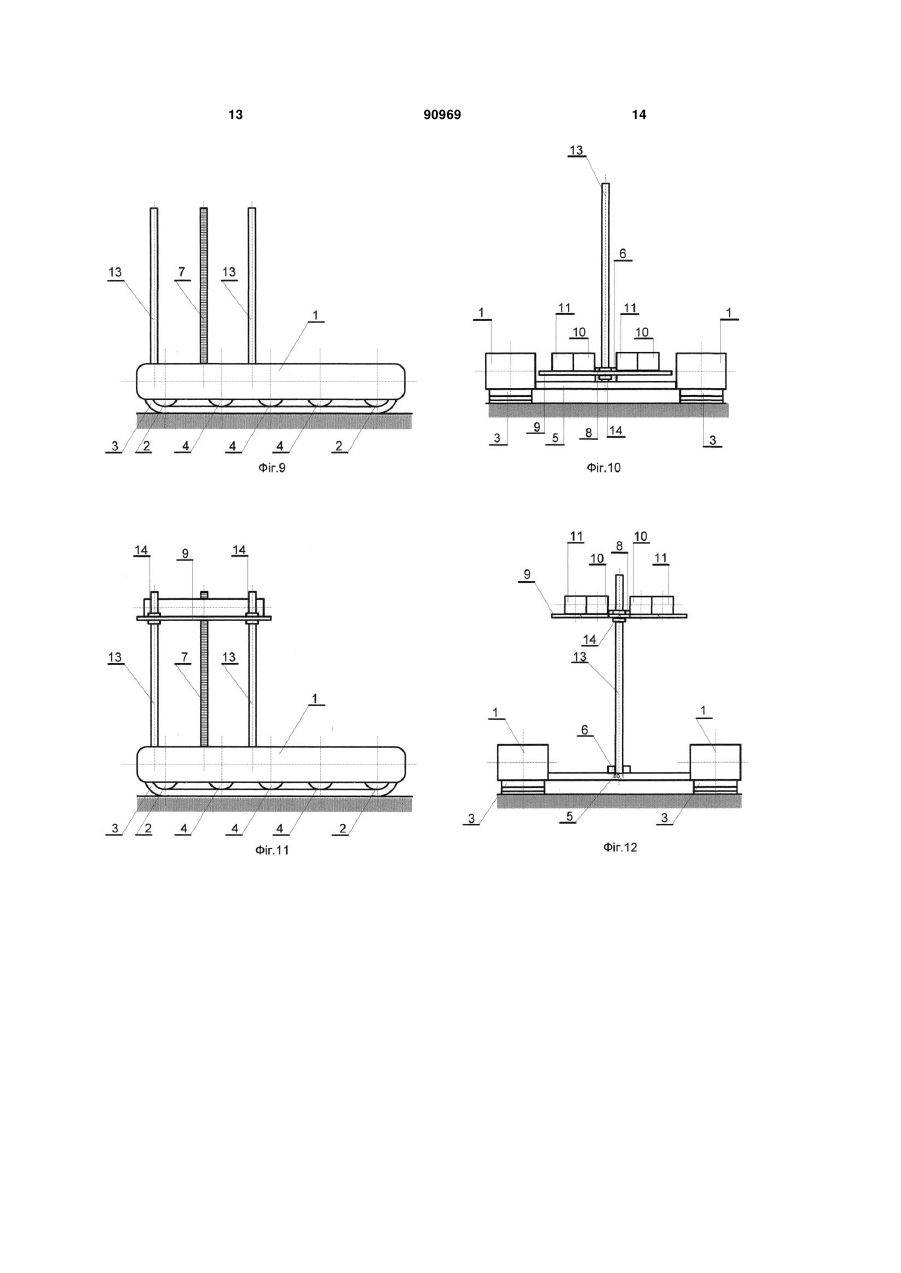
1. Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем, що включає електрохімічні, конденсаторні або комбіновані джерела електричної енергії, її перетворювачі, електромеханічні колісні, гусеничні або колісно-гусеничні рушії, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а так само комплект виконавчих механізмів, зокрема маніпулятори, системи озброєння і самоліквідації, який відрізняється тим, що на його передній половині встановлений вертикальний гвинтовий підіймач, що складається з жорстко закріпленого на рамі робота приводного вертикального електричного двигуна, на роторі якого безпосередньо закріплений вертикальний ходовий C2 2 (11) 1 3 - безпосередня вогняна підтримка піхоти в процесі проведення наступальних і оборонних операцій на місцевості і в населених пунктах; - надання допомоги пораненим і винесення їх з поля бою; - запобігання несанкціонованому доступу до об'єктів, що охороняються; - матеріально-технічне забезпечення; - дії в заражених і заборонених районах. - проведення диверсійної роботи і ряду інших операцій спеціального призначення. У мирний час невеликі переносні робототехнічні системи плануються до застосування для пошуку і порятунку людей під час землетрусів і інших стихійних лих, а так само в операціях по приведенню у виконання вимог закону. Обставиною принципового значення тут є те, що унаслідок постійного зростання у всьому світі останніми роками числа локальних військових конфліктів, терористичних інцидентів і піратських актів, в які тим або іншим чином виявляються залученими найбільш розвинені в науковотехнічному відношенні країни, практичне використання наземних військових робототехнічних пристроїв різко зросло, у зв'язку з тим, що їх застосування здатне в максимально можливому ступені понизити рівень людських втрат. Завдяки цьому до теперішнього часу вже накопичений великий об'єм теоретичних і експериментальних даних, що відносяться до аналізу безпосереднього застосування військових наземних роботів в реальних бойових і спеціальних операціях. Так, наприклад, відомі військові роботи, описані, наприклад, в опублікованих в Інтернеті російським інформаційним виданням CitCity 0607.11.2007 року матеріалах «Бойові сухопутні роботи» (див. http://www.citcity.ru), які достатньо широко застосовуються розвиненими в технічному відношенні країнами для виконання практично всіх функцій, описаних вище. У цих матеріалах описані американські військові роботи сімейства PackBot, що застосовуються для розмінування, а так само роботи TAGS і REDOWL. У Ізраїлі, Великобританії і Германії розроблені і знайшли військове застосування рухомі гусеничні роботи для розвідки, розмінування і знищення вибухових пристроїв різного типу. Армія США під час бойових дій і поліцейських операцій в Іраку з успіхом використовувала озброєні вогнепальною зброєю малогабаритні гусеничні роботи в наступальних і розвідувальних операціях. Загальна кількість військових роботів, використовуваних армією США в Іраку до кінця 2008 року досягло чотирьох тисяч. На державному рівні розробкою і практичним використанням військових роботів займаються в Росії, Франції, Великобританії і Японії. Як прототип пропонованого модульно структурованого військового наземного робота з вертикальним гвинтовим підіймачем прийнятий американський робот Talon на гусеничному ходу (див. згадані вище матеріали з CitCity від 0607.11.2007p.). Аналіз конструктивних особливостей як прототипу, так і реалізованих до теперіш 90969 4 нього часу і описаних в спеціальній літературі і Internet,i наземних військових роботів бойового і спеціального застосування дозволяє зробити висновок про ряд загальних принципових технічних недоліків, властивих цьому специфічному виду військової техніки. До них можна віднести наступні: - прототип, так само як і інші відомі конструкції військових наземних роботів малого і середнього габаритів не відповідає вимогам, що пред'являються до малорозмірних прихованих рухомих бойових об'єктів, із-за чого збільшена вірогідність виявлення подібних об'єктів супротивником. Наслідком цього є значний відсоток вогняного таких роботів в ході бойових дій; - унікальність конструктивного виконання, властива як прототипу, так і практично кожному з відомих зразків військових роботів. Це не дозволяє проводити оперативну модернізацію всієї конструкції в цілому; У основу конструктивних вирішень пропонованого винаходу поставлено завдання усунення недоліків, властивих, на наш погляд, не тільки наземному військовому роботові, вибраному як прототип, але і решті практично всіх відомих до теперішнього часу конструкцій військових роботів. З цією метою авторами справжньої заявки на видачу патенту на конструкцію модульно структурованого військового наземного робота з вертикальним гвинтовим підіймачем запропоновано, поперше, виконати його на основі використання модульного принципу побудови технічних систем. Практична реалізація модульного принципу полягає в тому, що наземний військовий робот, що пропонується, повинен бути конструктивно підрозділений на окремі повністю завершені функціональні блоки, кожен з яких призначений для виконання тільки одній основної принципової функції. Всі ці функціональні блоки повинні бути розміщені в механічно жорстких повністю ідентичних по зовнішніх габаритах коробчастих корпусах однієї і тієї ж простої геометричної форми. Очевидно, що це забезпечує максимально щільну упаковку вказаних функціональних блоків, що входять до складу корпусного конструктиву. На основі повного набору подібних функціональних модулів, що знаходяться в ідентичних корпусах, може бути створений цілий комплект наземних військових роботів, кожен з яких здатний вирішувати певні завдання відповідно до специфіки конкретної бойової обстановки. Загальний набір функціонально завершених блоків-модулів повинен включати: - енергетичний блок-модуль, що несе джерела електричної енергії електрохімічного (акумулятори електроенергії паливні елементи і їх комбінації) або накопичувального (швидкозарядні суперконденсатори) типів; - блок-модуль перетворювачів електричної енергії отримуваною від енергетичного блокумодуля; - блок-модуль датчиків системи тягового електромеханічного приводу; 5 - автономні блоки-модулі електромеханічних тягових рушіїв на колісному, гусеничному або комбінованому ходу; - блоки-модулі датчиків зовнішньої обстановки, прицілів далекомірів, повітряної розвідки; - блоки-модулі систем озброєння (стрілецьке, ракетне вогнеметне, лазерне і ін.) - блок-модуль системи самоліквідації; - спеціальні блоки-модулі, призначені для виконання обмеженого специфічного крута завдань. На додаток до вищезгаданого запропоновано розмістити комплекти модульно виконаних функціональних блоків горизонтально в один шар в напрямі, поперечному напряму руху. Завдяки такого конструктивного виконання корпусного агрегатуконструктиву досягнуте значне зменшення висоти пропонованого військового наземного робота, що робить його малопомітним скритним бойовим об'єктом невеликої висоти. Принциповою відмінністю пропонованого військового наземного робота є його устаткування горизонтальною підйомною платформою розміщеною в передній половині корпусу даного військового наземного робота, на якій закріплений комплект виконавчих блоків-модулів. До останніх можуть бути віднесені функціональні блоки-модулі датчиків обстановки, прицільних пристосувань, озброєння і механічних маніпуляторів. Для реалізації вертикального підйому вказаної вище підйомної платформи використаний встановлений вертикально в центрі передньої половини корпусу військового наземного робота, який пропонується, широкорегульований електричний двигун, на роторі якого безпосередньо, без проміжних механічних передач жорстко закріплений вертикальний ходовий гвинт, механічно пов'язаний з горизонтальною гайкою, жорстко прикріпленою до підйомної платформи, утворюючи з ходовим гвинтом гвинтову пару. Вказана гвинтова передача так само може бути реалізована на основі принципу «гвинт-гайка качання» у вигляді кулькогвинтової або ролікогвинтової пар, що, як відомо, забезпечує максимально високу точність відробітку сигналу, що управляє, тобто, прецизійне позиціонування підйомної платформи по вертикалі. Це, у свою чергу, сприяє, наприклад, підвищенню точності стрілецького озброєння пропонованого військового наземного робота. Для забезпечення стійкого переміщення по вертикалі горизонтального підйомної платформи, що несе комплект виконавчих функціональних блоків-модулів, система вертикального підйому, крім гвинтової передачі, повинна мати комплект жорстких вертикальних напрямних, які запропоновано виконати у вигляді двох вертикальних стержнів, жорстко закріплених симетрично в напрямі, поперечному напряму руху, в передній або задній частинах передньої половини рами-робота. Для забезпечення надійного переміщення підйомної платформи по вертикалі на ній жорстко закріплені опори ковзання, що знаходяться в безпосередньому механічному контакті з вертикальними напрямними. Дві вертикальні напрямні, так само можуть бути розміщені на рамі-основи пропонованого війсь 90969 6 кового наземного робота уздовж її подовжньої осі симетрично по обидві сторони відносно осі вертикального приводного електричного двигуна тягової гвинтової передачі, що сприяє більшій скритності пропонованого військового наземного робота. На кресленнях, що ілюструють конструктивну суть пропонованого модульний структурованого військового наземного робота з вертикальним гвинтовим підіймачем, представлені: Фіг.1. Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем і двома передніми напрямними при розміщенні підйомної платформи у крайньому нижньому положенні, вигляд збоку; Фіг.2. Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем і двома передніми напрямними при розміщенні підйомної платформи у крайньому нижньому положенні, вигляд спереду; Фіг.3. Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем і двома передніми напрямними, вигляд зверху; Фіг.4. Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем і двома передніми напрямними при розміщенні підйомної платформи у крайньому верхньому положенні, вигляд збоку; Фіг.5. Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем і двома передніми напрямними при розміщенні підйомної платформи у крайньому верхньому положенні, вигляд спереду; Фіг.6 Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем і двома-задніми напрямними при розміщенні підйомної платформи у крайньому нижньому положенні, вигляд збоку; Фіг.7 Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем і двома задніми напрямними при розміщенні підйомної платформи у крайньому верхньому положенні, вигляд збоку; Фіг.8 Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем і двома задніми напрямними, вигляд зверху; Фіг.9 Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем і двома подовжніми напрямними, при розміщенні підйомної платформи у крайньому нижньому положенні, вигляд збоку; Фіг.10 Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем і двома подовжніми напрямними при розміщенні підйомної платформи у крайньому нижньому положенні, вигляд спереду; Фіг.11 Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем і двома подовжніми напрямними при розміщенні підйомної платформи у крайньому верхньому положенні, вигляд збоку; Фіг.12 Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем і двома подовжніми напрямними при роз 7 міщенні підйомної платформи в крайньому верхньому положенні, вигляд спереду; Фіг.13 Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем і двома подовжніми напрямними, вигляд зверху; На Фіг.1, 2, 3, 4 і 5 представлена конструктивна компоновка пропонованого модульно структурованого військового наземного робота з вертикальним гвинтовим підіймачем. Вона складається з двох ідентичних функціональних блоків-модулів 1 тягового електромеханічного приводу, як який застосований регульований електромеханічний гусеничний привід, що складається з приводних коліс 2, що входять в зачеплення з гусеницями 3, і опорних катків 4. Тягові функціональні блокимодулі 1 жорстко укріплені на платформі 5 робота. На осі симетрії передньої половини платформи 5 жорстко закріплений у вертикальному положенні корпус 6 статора широкорегульованого електричного двигуна, що має високу перевантажувальну здатність. Безпосередньо до валу ротора вказаного електродвигуна по осі ротора без будь-яких проміжних механічних передач вертикально жорстко прикріплений ходовий гвинт 7, що має механічний зв'язок з горизонтальною гайкою 8, яка, у свою чергу, жорстко закріплена в центрі горизонтальної підйомної платформи 9. Для досягнення прецизійного переміщення і точного позиціонування горизонтальної підйомної платформи 9 рекомендовано застосувати гвинтову передачу типу «гвинт-гайка качання» на основі кулькогвинтової або ролікогвинтової пари. На підйомної платформи 9 встановлений в один шар комплект виконавчих функціональних блоків-модулів 10 озброєнь, а так само блоки-модулі 11 датчиків і прицільних пристроїв і, наприклад, маніпуляторів 12. Для забезпечення надійного функціонування гвинтового підйомного механізму на платформі 5 жорстко закріплена пара вертикальних напрямних, 13, уздовж яких, переміщається опори 14 ковзання, жорстко закріплені на горизонтальній підйомній платформі 9. У конструкції військового наземного робота, представленій на Фіг.1, 5, вертикальні напрямні 13 симетрично закріплені в передній частині платформи 5 робота в напрямі, поперечному руху. На фігурах 1 і 2 підйомна платформа 9 показана такою, що знаходиться в крайньому нижньому, похідному положенні, а на Фіг.4 і 5 - в крайньому верхньому, бойовому положенні. На Фіг.6, 7, 8 і 9 показаний різновид конструкції пропонованого військового наземного робота при поперечному розміщенні вертикальних напрямних 13 в задній частині передньої половини рами 90969 8 робота при розміщенні підйомної платформи 9 як в крайньому нижньому, похідному, так і в крайньому верхньому, бойовому положенні. Як показано на Фіг.3, 8 і 13, на задній половині платформи 5 жорстко в один шар закріплені функціональні блоки-модулі 15 джерел енергоживлення, блоки-модулі 16 перетворювачів електричної енергії, блоки-модулі 17 бортового комп'ютера і ін. Модульно структурований військовий наземний робот з гвинтовим підіймачем, що пропонується, працює таким чином. На підготовчому етапі з набору тягових функціональних блоків-модулів, що є в наявності, 1 до платформи 5, що несе електричний двигун 6 вертикального підйому і підйомну платформу 9, жорстко прикріпляються такі тягові блоки-модулі 1, які повинні в максимальному ступені відповідати характеру місцевості майбутнього використання військового наземного робота. У загальному випадку тягові функціональні блокимодулі 1 можуть мати колісного, гусеничного або комбінованого, колісно-гусеничного виконання. Після установки на платформі 5 тягових транспортних блоків-модулів 1 на горизонтальному підйомному майданчику 9 проводиться установка в один шар виконавчих блоків-модулів робота 10, 11 і 12, після чого проводиться монтаж вертикального ходового гвинта 7 і напрямних 13. На задній половині платформи 5, яка найбільшою мірою механічно захищена, жорстко закріплюються корпуси функціональних блоків-модулів 15, 16 і 17, де розміщені джерела електричної енергії, її перетворювачі, а так само бортовий комп'ютер. Після діагностичної перевірки функціонування всіх систем пропонованого модульно структурованого військового наземного робота і висновку про його надійне функціонування він допускається до участі в запланованих бойових і спеціальних операціях. Оскільки всі його функціональні блокимодулі розміщені на платформі 5 робота в один шар, то його вихід до місця безпосереднього бойового або спеціального функціонування відбувається приховано, не даючи можливості противникові уразити робот на підготовчому етапі його функціонування. Потім по сигналах оператора, що знаходиться в укритті, дається команда на підйом майданчики 9 на висоту, визначувану умовами бойової обстановки, після чого виконавчі функціональні блоки-модулі 10, 11 і 12 по командах зовнішнього оператора або в автономному режимі, відповідно до встановленої програми, виконують комплекс запланованих завдань. Потім робот повертається на вихідні позиції, де проводиться його технічне обслуговування і підготовка до подальших дій. 9 90969 10 11 90969 12 13 90969 14 15 Комп’ютерна верстка А. Рябко 90969 Підписне 16 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюModule-structured military surface robot with vertical screw lift
Автори англійськоюPopovichenko Oleksandr Viktorovych, Tolstoi Oleksii Volodymyrovych, Belikov Viktor Tryfonovych, Vasyliev Valerii Valentynovych, Hrachov Mykola Mykolaiovych
Назва патенту російськоюМодульно структурированный военный наземный робот с вертикальным винтовым подъемником
Автори російськоюПоповиченко Александр Викторович, Толстой Алексей Владимирович, Беликов Виктор Трифонович, Васильев Валерий Валентинович, Грачов Николай Николаевич
МПК / Мітки
МПК: F41H 7/00
Мітки: підіймачем, робот, наземний, структурований, вертикальним, модульної, гвинтовим, військовий
Код посилання
<a href="https://ua.patents.su/8-90969-modulno-strukturovanijj-vijjskovijj-nazemnijj-robot-z-vertikalnim-gvintovim-pidijjmachem.html" target="_blank" rel="follow" title="База патентів України">Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем</a>
Модульно структурований військовий наземний робот
Номер патенту: 87777
Опубліковано: 10.08.2009
Автори: Поповіченко Олександр Вікторович, Беліков Віктор Тріфонович, Лещенко Олег Іванович, Толстой Олексій Володимирович
МПК: F41H 7/00
Мітки: робот, структурований, модульної, військовий, наземний
Формула / Реферат:
1. Модульно структурований військовий наземний робот бойового або спеціального застосування, що включає електрохімічні, конденсаторні або комбіновані джерела електричної енергії, її перетворювачі, електромеханічні колісні, гусеничні або колісно-гусеничні рушії, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а так само комплект виконавчих механізмів, зокрема маніпулятори, системи озброєння і...
Здвоєний модульно структурований військовий наземний робот
Номер патенту: 88833
Опубліковано: 25.11.2009
Автори: Толстой Олексій Володимирович, Беліков Віктор Тріфонович, Поповіченко Олександр Вікторович, Лещенко Олег Іванович
МПК: F41H 7/00
Мітки: модульної, структурований, військовий, робот, здвоєний, наземний
Формула / Реферат:
1. Здвоєний модульно структурований наземний військовий робот для ведення бойових і спеціальних операцій, що має необхідний комплект виконавчої апаратури і пристроїв у вигляді електрохімічних або накопичувальних джерел електричної енергії, її перетворювачів, електромеханічних рушіїв колісного, гусеничного або комбінованого типів, набору датчиків, аналізаторів зовнішньої обстановки, маніпуляторів, озброєння з прицілами, який відрізняється тим,...
Модульно структурований військовий наземний робот для бойових і спеціальних операцій
Номер патенту: 88585
Опубліковано: 26.10.2009
Автори: Беліков Віктор Тріфонович, Лещенко Олег Іванович, Поповіченко Олександр Вікторович, Васильєв Валерій Валентинович, Толстой Олексій Володимирович
МПК: F41H 13/00
Мітки: військовий, робот, бойових, модульної, структурований, операцій, наземний, спеціальних
Формула / Реферат:
1. Модульно структурований військовий наземний робот для бойових і спеціальних операцій, що включає розміщені в корпусному конструктиві електрохімічні, конденсаторні або комбіновані джерела електричної енергії, її перетворювачі, електромеханічні колісні, гусеничні або колісно-гусеничні рушії, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а також комплект виконавчих механізмів, зокрема маніпулятори,...
Військовий рекультиватор грунту
Номер патенту: 3830
Опубліковано: 15.12.2004
Автори: Стужук Петро Іванович, Гаврилов Сергій Леонідович, Яблоков Володимир Васильович, Орел Володимир Володимирович, Грибачов Михайло Васильович
МПК: B09B 3/00, B08B 7/04, B08B 13/00
Мітки: рекультиватор, військовий, грунту
Формула / Реферат:
Військовий рекультиватор грунту, що містить рухому основу та різальний інструмент, при цьому різальний інструмент встановлений на рухомій основі, який відрізняється тим, що містить форсунки, теплообмінники, підігрівник, нагнітач, насос, бак і каток, які встановлено на рухомій основі, при цьому одна частина форсунок приєднана до виходу вторинного контуру першого теплообмінника, вхід якого з'єднаний з виходом нагнітача, друга частина форсунок...
Наземний транспортний засіб для перевезення пасажирів

Номер патенту: 34795
Опубліковано: 15.03.2001
Автори: Павлюк Дмитро Олександрович, Гусєв Олександр Володимирович
МПК: B60R 21/34
Мітки: перевезення, наземний, засіб, пасажирів, транспортний
Формула / Реферат:
Наземний транспортний засіб для перевезення пасажирів, який містить двигун, шасі, трансмісію, кузов, ходову частину, механізми керування рухом, гальмову систему і двері, який відрізняється тим, що на протилежному від дверей для висадки пасажирів боці наземного транспортного засобу для перевезення пасажирів встановлено нарощувач габаритної довжини, а наземний транспортний засіб для перевезення пасажирів обладнано механізмом керування...
Попередній патент: Застосування деревинних матеріалів, що містять поліамін, для зниження вмісту формальдегіду в навколишньому повітрі
Наступний патент: Очисник головок коренеплодів
Випадковий патент: Спосіб передпосівної обробки насіння озимої пшениці