Спосіб робочого моніторингу рейкових гальм
Номер патенту: 99772
Опубліковано: 25.09.2012
Автори: Шлагер Петер, Лехманн Хенрі, Даксеккер Франц, Датцрайтер Йозеф
Формула / Реферат
1. Спосіб робочого моніторингу рейкових гальм, згідно з яким через обмотку гальмового магніту перепускають електричний струм, спосіб включає наступні стадії:
- вимірювання електричного струму (i2, i4) і
- порівняння часових кривих виміряного струму з уведеною в пам'ять часовою кривою опорного струму (i1, i3).
2. Спосіб за п. 1, який відрізняється тим, що порівняння проводять шляхом створення різниці між вимірюваним струмом (i2, i4) та опорним струмом (i1, i3).
3. Спосіб за п. 2, який відрізняється тим, що різницю між вимірюваним струмом (i2, i4) та опорним струмом (i1, i3) інтегрують у часі.
4. Спосіб за одним з пп. 1-3, який відрізняється тим, що порівняння проводять лише в наперед заданому часовому інтервалі, в якому відбувається процес вмикання рейкового гальма, причому зазначений наперед заданий часовий інтервал є коротшим, ніж тривалість часу між вмиканням струму і досягненням номінального струму.
5. Спосіб за одним з пп. 1-4, який відрізняється тим, що струм через обмотку гальмового магніту перепускають імпульсами (Р1-Р4), а порівняння проводять заново на кожному імпульсі (Р1-Р4).
6. Спосіб за одним з пп. 1-5, який відрізняється тим, що визначають локальний мінімум (е min) і/або локальний максимум (е max) вимірюваного струму (i4) іщо порівнянню з опорним струмом (i3) піддають лише часовий хід вимірюваного струму (i4), що містить зростання цього струму (i4).
7. Спосіб за п. 6, який відрізняється тим, що порівнянню з опорним струмом (i3) піддають лише хід вимірюваного струму (i4), що йде слідом за локальним мінімумом (е min).
8. Спосіб за пп. 6 або 7, який відрізняється тим, що при охопленні локального мінімуму (е min) і локального максимуму (е max) вимірюваного струму (i4) визначають інтеграл різниці між швидкістю змінення в часі вимірюваного струму (i4) та опорного струму (i3) впродовж наперед заданого інтервалу часу і порівнюють його з наперед заданою межовою величиною.
9. Спосіб за одним з пп. 1-8, який відрізняється тим, що визначають введений у пам'ять часовий хід опорного струму (i1, i3) в залежності від типу рейкового гальма.
10. Спосіб за одним з пп. 1-8, який відрізняється тим, що визначають введений у пам'ять часовий хід опорного струму (і1, i3) незалежно від типу рейкового гальма і проводять порівняння часового ходу вимірюваного струму з часовим ходом опорного струму в залежності від принаймні однієї межової величини, яка задається в залежності від типу рейкового гальма.
11. Спосіб за одним з пп. 6-10, який відрізняється тим, що проводять порівняння часового інтервалу (t1-t2) виникнення локального максимуму (е max) і локального мінімуму (е min) з відповідними величинами опорного сигналу.
12. Спосіб за одним з пп. 1-11, який відрізняється тим, що перед порівнянням вимірюваного струму (i2, i4) проводять його фільтрування фільтром нижніх частот.
13. Спосіб за п. 12, який відрізняється тим, що гранична частота фільтра нижніх частот є меншою 50 Гц.
14. Спосіб за одним з пп. 6-13, який відрізняється тим, що визначають різницю між локальним максимумом (е max) і локальним мінімумом (е min) величин струму і проводять її порівняння з наперед заданою межовою величиною.
15. Спосіб за п. 1, який відрізняється тим, що межова величина відповідає принаймні 30 % різниці опорного струму.
16. Спосіб за одним з пп. 6-15, який відрізняється тим, що проводять порівняння з межовою величиною величини інтегралу різниці між вимірюваним струмом (i2, i4) та екстрапольованим відтинком кривої від точки часу першого екстремального значення (е max) до досягнення номінального струму (е nеnn).
17. Спосіб за п. 16, який відрізняється тим, що створюють різницю інтегралу в межах заданого часового вікна.
18. Спосіб за п. 17, який відрізняється тим, що зазначене часове вікно перекриває ділянку перед (t2-x) і після (t2+x) локального мінімуму (е min).
19. Спосіб за п. 18, який відрізняється тим, що проводять порівняння струму, виміряного в точці часу (t2) локального мінімуму (е min), з середнім значенням струму, виміряного у зазначеному часовому вікні.
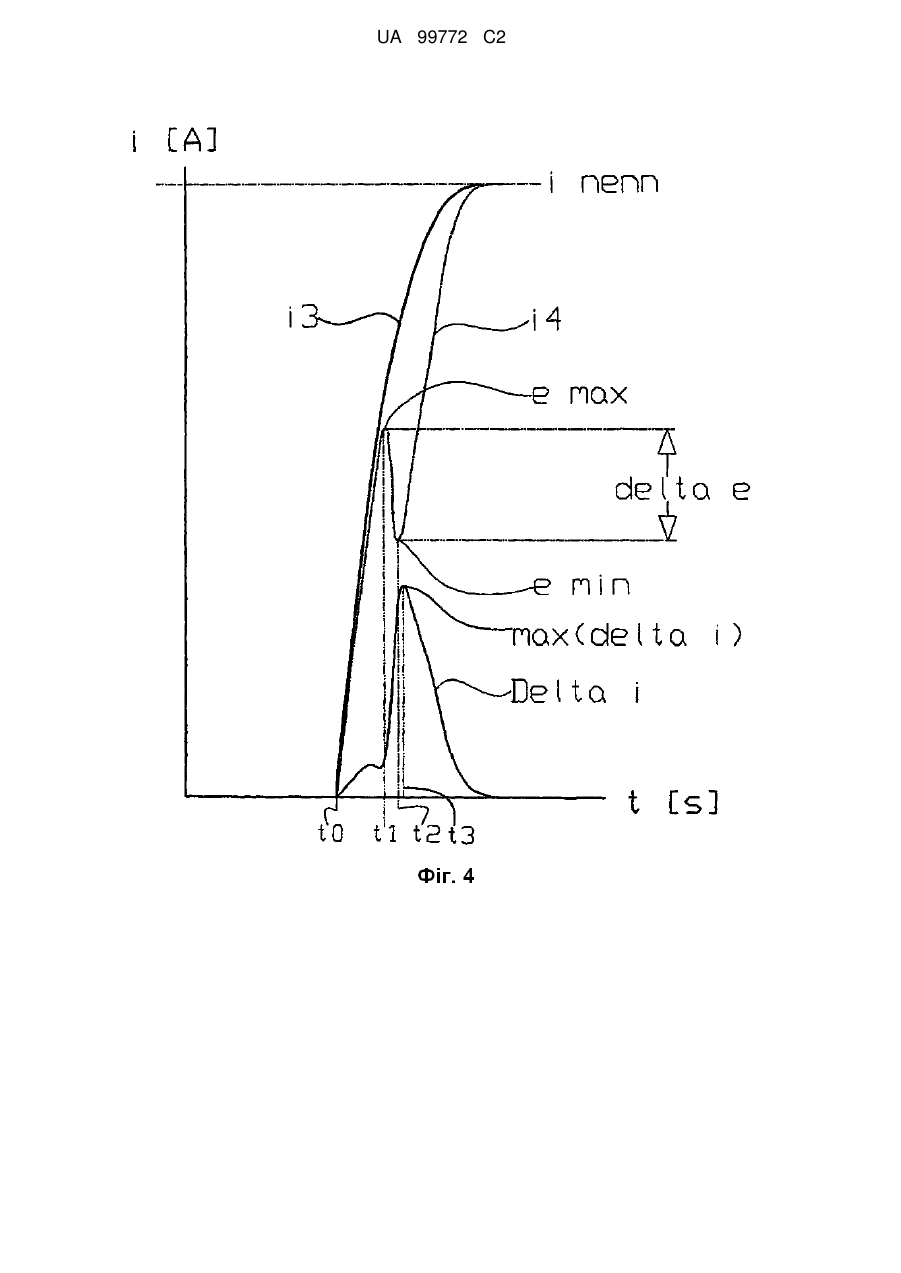
20. Спосіб за одним з пп. 6-19, який відрізняється тим, що проводять контроль того, чи точка часу виникнення максимуму (max(Delta і)) різниці (Delta і) між фактичним струмом (і4) та опорним струмом (і3) лежить у межах заданого часового вікна (t2-x ÷ t2+x), де х є меншим 1 секунди.
21. Спосіб за одним з пп. 1-20, який відрізняється тим, що виміряну величину струму (і4) і/або опорного струму (і3) залежно від величини виміряного електричного струму (і4) нормують в стаціонарному стані цього струму.
Текст
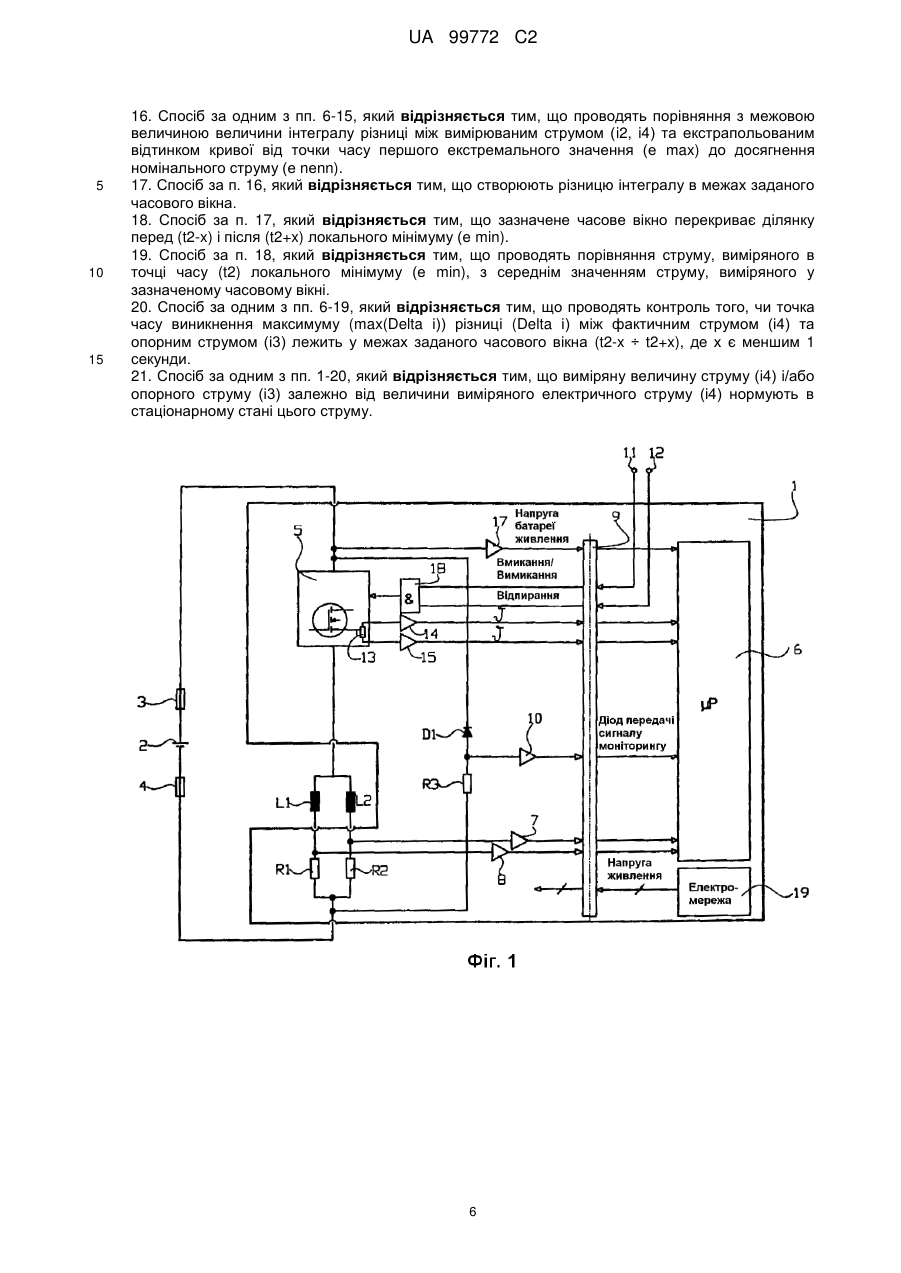
Реферат: Спосіб робочого моніторингу рейкових гальм, згідно з яким через обмотку гальмового магніту перепускають електричний струм, який вимірюють, (і2, і4) і проводять порівняння часових кривих виміряного струму з уведеною в пам'ять часовою кривою опорного струму (і1, і3). При цьому порівняння проводять, зокрема, шляхом створення різниці між виміряним та опорним струмами. У кращому варіанті зазначену різницю між виміряним та опорним струмами інтегрують у часі та порівнюють з певною межовою величиною. Для визначення наявності магнітного зчеплення між рейковим гальмом і рейкою у процесі включення рейкового гальма визначають, чи виявляється у виміряного струму локальний мінімум (е min) і/або локальний максимум (е max), проводячи для цього порівняння з опорним струмом лише часового ходу вимірюваного струму, що містить зростання останнього. У кращому варіанті ввімкнення струму здійснюють імпульсами, а порівняння вимірюваного струму з опорним струмом проводять при кожному імпульсі. UA 99772 C2 (12) UA 99772 C2 UA 99772 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід стосується способу робочого моніторингу рейкових гальм для одиниць рейкових рухомих складів згідно з обмежувальною частиною п. 1 Формули винаходу. Один з таких способів відомий із винаходу DE 10155143 А1. Сучасні рейкові рухомі склади обладнуються, поряд з пневматичними гальмовими системами, також магнітними рейковими гальмами, якими можуть служити гальма на вихрових струмах або просто магнітні рейкові гальма. Для ширококолійних залізниць є характерною так звана "висока підвіска", при котрій гальмовий магніт утримується на пружинах над рейкою на висоті приблизно 100 мм. При гальмуванні сила пружин долається пневматичним виконуючим циліндром, внаслідок чого гальмовий магніт опускається із свого верхнього положення в робоче положення на рейку. Водночас вмикається електрична частина гальма [Wolfgang Hendrichs, "Das statische, dynamische und thermische Verhalten von Magnetschienenbremsen" (Статичні, динамічні та теплові характеристики магнітних рейкових гальм), Elektrische Bahnen eb, 86. Jahrgang, Heft 7/1988, S. 224-228]. У гальмах моторних вагонів може використовуватися комбінація із високої та низької підвісок. При цьому магніти підвішуються на натискних циліндрах або сильфонних пневмобалонах, які за допомогою стисненого повітря притискаються у верхнє положення до нерухомо закріпленого на візку центрувального упора. При гальмуванні відбувається випускання повітря із натискного циліндра або сильфонного пневмобалона, у результаті чого магніт опускається в положення готовності. В одиницях міських рейкових рухомих складів, наприклад у трамваях, зазвичай використовується низька підвіска. У магнітному рейковому гальмі гальмовий магніт у положенні гальмування зазвичай перебуває в контакті тертя з рейкою. У так званому лінійному гальмі на вихрових струмах гальмовий магніт, напроти, у стані гальмування утримується на певній відстані від рейки, а його котушки збудження намагнічують полюсні осердя, внаслідок чого при ввімкнутому гальмі на вихрових струмах, коли воно рухається відносно рейки, відбувається індукування вихрових струмів у ходовій рейці в результаті змінення магнітного потоку в часі. Ці струми створюють магнітне поле, спрямоване проти магнітного поля гальма на вихрових струмах. В результаті створюється горизонтальна гальмівна сила, що діє в напряму проти руху. Але для цього є необхідним забезпечувати магнітне зчеплення між рейкою та гальмовим магнітом, яке залежить, головним чином, від повітряного зазору між гальмовим магнітом і рейкою. Таким чином, в обох типах магнітних гальм ефективність гальма залежить у першу чергу від того, наскільки правильною є відстань між гальмовим магнітом і рейкою. У патенті DE 10155143 запропоновано пристрій для діагностики та моніторингу відстані між магнітним гальмом і ходовою рейкою, в якому використовуються численні датчики відстані між магнітним гальмом і ходовою рейкою, котрі виміряють повітряний зазор між магнітним гальмом і верхньою стороною рейки. Цей пристрій дозволяв в обох типах магнітних гальм безперервно перевіряти те, чи є правильною відстань між гальмовим магнітом і рейкою як під час руху, так і в стані гальмування. Але застосування зазначених датчиків потребує додаткових витрат і супроводжується небезпекою того, що при відмові або хибній роботі таких датчиків похибка не буде розпізнаватися або будуть створюватися невідповідні, помилкові сигнали. У патенті DE 10009331 С2 було запропоновано використовувати датчики, що виміряють відстань магнітного гальма від верхньої крайки рейки, і в залежності від отримуваного сигналу вимірювання керувати пристроєм регулювання відстані між магнітним гальмом і верхньою крайкою рейки за допомогою відповідних виконуючих органів. Завданням даного винаходу є вдосконалити спосіб робочого моніторингу рейкових гальм описаних вище типів таким чином, щоб бездоганність функціонування рейкових гальм можна було контролювати без застосування датчиків відстані. Поставлене завдання вирішується ознакою, окресленою в п. 1 Формули винаходу. Кращі варіанти здійснення та вдосконалення даного винаходу визначені в залежних пунктах Формули винаходу. Суть даного винаходу полягає в тому, щоб зміни струму, викликані змінами магнітного ланцюга, використовувати для однозначного зворотного переходу в наперед заданий стан системи "рейкове гальмо - рейка". Магнітне зчеплення між гальмовим магнітом і рейкою утворює магнітний ланцюг, і в магнітному рейковому гальмі це зчеплення залежить від відстані між гальмовим магнітом і рейкою. Отже це магнітне зчеплення зворотним чином безпосередньо впливає на струм збудження, що проходить через обмотку гальмового магніту. Якщо при опусканні магнітного 1 UA 99772 C2 5 10 15 20 25 30 35 40 45 50 55 60 рейкового гальма вмикається струм збудження, то, як тільки встановлюється магнітне зчеплення, виникає значне змінення цього струму. Даним винаходом пропонується вимірювати електричний струм, що тече через обмотку гальмового магніту, і порівнювати криву змінення цього струму в часі з кривою змінення в часі опорного струму, введеною в пам'ять обчислювального пристрою. У результаті цього порівняння виробляється сигнал, який показує те, чи має місце магнітне зчеплення між гальмовим магнітом і рейкою, тобто чи є рейкове гальмо в робочому стані або готовим до роботи. Вищевикладене є цілком правомірним також для магнітних гальм на вихрових струмах, у котрих крива змінення струму збудження в часі (часова крива) залежить від магнітного зчеплення між гальмовим магнітом і рейкою. Шляхом порівняння бажаної кривої струму (опорного струму) з виміряною кривою струму визначається відхилення магнітного зчеплення між гальмовим магнітом і рейкою. При цьому не потребується ні застосування додаткових датчиків, ні використовуваного дотепер візуального контролю. Замість додаткових датчиків для вимірювання струму збудження при цьому потребується лише один вимірювальний опір у пристрої керування. Обчислення часової кривої струму збудження і порівняння її з бажаною кривою струму може здійснюватися за допомогою мікропроцесора у пристрої керування гальмом. Запропонований спосіб дозволяє контролювати робочу готовність рейкового гальма або його техніко-експлуатаційний стан. Нижче винахід розглянуто більш докладно на деяких прикладах його здійснення з поясненнями на супровідних кресленнях, де показані: Фіг. 1 - принципова схема пристрою керування для підведення магнітного рейкового гальма в потрібне положення; і Фіг. 2 - діаграма вимірювання часових кривих струму збудження у випадках наявності і відсутності магнітного зчеплення між гальмовим магнітом і рейкою. Фіг. 3 - діаграма з часовими кривими струму збудження при періодичному вмиканні струму збудження; і Фіг. 4 - діаграма вимірювання часових кривих струму збудження зі зміною і без зміни магнітного зчеплення між гальмовим магнітом і рейкою. На Фіг. 1 показана принципова схема пристрою 1 керування для підведення в потрібне положення гальмових магнітів, показаних тут індуктивностями L1 і L2. Пристрій 1 керування отримує електроенергію живлення від бортової мережі і, зокрема, від батареї 2 живлення через підключені до обох її полюсів захисні запобіжники 3 і 4. Обидві індуктивності L1 і L2 включені в електричний ланцюг з силовим вимикачем 5, керування котрим здійснюється мікропроцесором 6 і котрий з'єднує індуктивності L1 і L2 з батареєю 2 живлення. Послідовно з кожною індуктивністю L1 і L2 включений шунтувальний опір, відповідно, R1 і R2, падіння електричної напруги на кожному з яких є пропорційним електричному струму, що проходить через індуктивності, відповідно, L1 і L2. Ця напруга знімається зі спільних точок з'єднання індуктивностей L1 і L2 з опорами, відповідно, R1 і R2 і через вимірювальні підсилювачі, відповідно, 7 і 8 передається на мікропроцесор 6. Мікропроцесор 6 відокремлений від силової частини вимикача гальванічною розв'язкою 9. Силовий вимикач 5 має датчик 13 температури, який вимірює температуру силового вимикача 5 і передає відповідний сигнал через вимірювальний підсилювач 14 або 15 та гальванічну розв'язку 9 на мікропроцесор 6. Паралельно послідовному ланцюгу, що складається із силового вимикача 5, індуктивностей L1, L2 і шунтувальних опорів R1, R2, включений вільновідкритий діод D1 з шунтувальним опором R3 і вимірювальний підсилювач 10, який передає сигнал моніторингу з цього діода через гальванічну розв'язку 9 на мікропроцесор 6. Один полюс силового вимикача 5, що є з'єднаним з батареєю живлення (зазвичай з плюсовим полюсом), через ще один вимірювальний підсилювач 17 і гальванічну розв'язку 9 з'єднується з мікропроцесором 6. У цьому ланцюзі відбувається вимірювання і контроль напруги батареї живлення. Для керування силовим вимикачем 5 використовуються два сигнали, а саме сигнал відпирання і сигнал вимикання (EIN/AUS), за яками відбувається вмикання і вимикання цього силового вимикача. Обидва ці сигнали можуть через зовнішні виводи 11 і 12 передаватися на пристрій 1 керування, а саме в разі потреби - через гальванічну розв'язку 9, що, цілком зрозуміло, також є можливим, ці сигнали передаються на мікропроцесор 6, який зі своїх вихідних виводів передає їх далі через гальванічну розв'язку. Обидва ці сигнали збігаються один з одним на вході вентильної схеми "І" 18 і керують силовим вимикачем 5, а тим самим і вмиканням та вимиканням індуктивностей L1 і L2 гальмового магніту. 2 UA 99772 C2 5 10 15 20 25 30 35 40 45 50 55 60 На стороні, гальванічно відокремленій від силової частини (зокрема, від силового вимикача 5), поряд з мікропроцесором 6 є ще один мережний блок живлення 19, який виробляє регульовану напругу для живлення вимірювальних підсилювачів і для керування силовим вимикачем 5. Постачання електричної напруги на вищезгадані конструктивні частини є гальванічно відокремленим від мережного блоку живлення 19. Струми через індуктивності L1 і L2 і далі через шунтувальні опори R1 і R2 виміряється і передається на мікропроцесор 6. Контроль вільновідкритого діода D1 здійснюється через вимірювальний підсилювач 10, який включений у схему порівняння, що вимірює струм через вільновідкритий діод D1 за падінням напруги на шунтувальному опорі R3. Вимірювальний підсилювач 10 виробляє на виході цифровий сигнал, який подається на мікропроцесор 6. Температура силового вимикача контролюється за допомогою датчика 13 температури, а отриманий з нього аналоговий сигнал передається через вимірювальні підсилювачі 14 і 15 на мікропроцесор 6. Напруга батареї живлення контролюється вимірювальним підсилювачем 17, а відповідний аналоговий сигнал з його виходу передається також на мікропроцесор 6. Всі сигнали, що знімаються з силової частини і що надсилаються на неї, а також всі напруги живлення силової частини є гальванічно відокремленими від частини керування (мікропроцесора 6 і мережного блока живлення 19). Температура гальмових магнітів контролюється непрямо за струмом через індуктивності L1 і L2 в стаціонарному стані. Омічний опір індуктивностей L1 і L2 значно змінюється з температурою, внаслідок чого при відомих інших параметрах у стаціонарному стані та при стаціонарному струмі більше 0 з часовою похідною di/dt=0 контроль температури може потребувати корекції, що враховується при обчисленні. На Фіг. 2 показана діаграма залежності від часу (t) струму (і), що проходить через індуктивності (гальмовий магніт) L1 і L2. Крива i1 струму відповідає випадку, в якому гальмовий магніт має контакт з рейкою, а крива i2 - випадку, в якому гальмовий магніт не має контакту з рейкою. Криві i1 та i2 струмів суттєво відрізняються одна від одної за швидкістю зростання струму. В основу даного винаходу покладене обчислювання швидкостей зростання струму. Це дозволяє простим вимірюванням струму через шунтувальні опори R1 і R2 (Фіг. 1) визначити те, чи є гальмовий магніт у контакті з рейкою. В одному з варіантів здійснення винаходу часова характеристика зростання струму в стані контакту гальмового магніту з рейкою, відображена на Фіг. 2 кривою і2, вводиться в пам'ять мікропроцесора 6 як "опорний струм". Криву i2 опорного струму в одному з варіантів здійснення винаходу визначають індивідуально для кожного рейкового гальма. В іншому варіанті криву i2 можна визначати теоретично та адоптувати до кожного типу рейкового гальма або індивідуально до кожного рейкового гальма шляхом застосування відповідних нормуючих коефіцієнтів або шляхом добору відповідних межових величин, що розглядається нижче. Далі мікропроцесор 6 визначає різницю між виміряним ходом струму, отриманого з шунтувальних опорів R1 і R2 вимірювальних підсилювачів 7 і 8, і ходом опорного струму та інтегрує цю різницю в часі. Якщо цей інтеграл різниці ходів струмів перевищує певну наперед задану межову величину, то мікропроцесор 6 повідомляє про відсутність контакту між гальмовим магнітом і рейкою. Якщо ж, напроти, даний інтеграл є нижчим вищезгаданого межового рівня, то мікропроцесор повідомляє про встановлення контакту і отже про готовність і нормальне функціонування рейкового гальма. Можливим є також зворотний варіант, в якому крива i2 відповідає опорному струму для уявного рейкового гальма, а логіка здійснення моніторингу є протилежною розглянутій вище. У кращому варіанті вищезгаданий інтеграл різниці обчислюють лише в одному, наперед заданому часовому інтервалі, який є меншим часового інтервалу, в межах котрого струм через індуктивності L1 і L2 досягає величини повного насичення або певного номінального значення. Відповідно до іншого вдосконалення даного винаходу, схематично ілюстрованого на Фіг. 3, процес вмикання поділяється на множину імпульсів вмикання Р1 - Р4, якими, таким чином, здійснюється тактове спрацьовування силового вимикача 5 (Фіг. 1). У результаті послідовно, один за одним виникають періодичні зростання і падіння струму аж до досягнення певного номінального струму у фазу Р4. Описане вище обчислення швидкості зростання струму проводиться в кожну із фаз Р1 - Р4. При цьому таке обчислення може проводиться також протягом інтервалу часу, що є коротшим, ніж інтервали часу Р1, Р2 або Р3. У кращому варіанті обчислення проводять на початку відповідної фази. На Фіг. 4 показаний хід змінення в часі струму через індуктивності L1 і L2. Кривою i3 показаний хід змінення струму вмикання без змінення стану магнітного зчеплення між гальмовим магнітом і рейкою. Залежно від того, має місце магнітне зчеплення чи ні, різним є хід 3 UA 99772 C2 5 10 15 20 25 30 35 40 45 50 55 60 змінення крутизни, показаний кривими i1 та i2 на Фіг. 2. Якщо під час процесу вмикання відбувається змінення стану магнітного зчеплення між гальмовим магнітом і рейкою, то показаний кривою i4 хід струму виявляє значну зміну, що віддзеркалюється в утворенні локальних екстремумів e min і e max. У момент часу (t1), в котрий встановлюється магнітне зчеплення, величини індуктивностей L1 і L2, показаних на еквівалентній схемі Фіг. 1, змінюються таким чином, що струм досягає локального максимуму (e max), а потім протягом короткого часу зменшується і після досягнення локального мінімуму e min відновлюється в точці t2, і далі зростає трохи повільніше. Шляхом обчислення цих значних змін, тобто локальних екстремальних значень e max і e min струму i4, можна робити висновок щодо змінення стану магнітного зчеплення. Якщо, наприклад, як показано на Фіг. 4, струм i4 збудження через індуктивності L1 і L2 вмикається вже під час фази механічного опускання гальмового магніту в напрямку рейки, то при зменшенні повітряного зазору між гальмовим магнітом і рейкою, починаючи від певної відстані, виникає магнітне зчеплення і вимірюється хід струму уздовж кривої i4, показаної на Фіг. 4. Відповідно до одного із вдосконалень даного винаходу обчислення згідно з описаним вище процесом у разі потреби проводять кожний раз з появою локального мінімуму e min. Таким чином, починаючи від цього моменту часу, обчислюють швидкість зростання струму та інтегрують різницю між уведеною в пам'ять опорною кривою та виміряною фактичною кривою протягом певного часу. Обчислення при цьому також можна здійснювати протягом певного, наперед заданого інтервалу часу. Отже, в такий спосіб порівнюються лише позитивні швидкості зростання струму. Вищезгадана межова величина інтегралу може встановлюватися в залежності від типу рейкового гальма. Оскільки на практиці на вимірювані характеристики струму накладаються паразитні сигнали перешкод, то в одному з варіантів здійснення винаходу сигнал вимірюваної кривої струму піддають фільтрації, перепускаючи його, зокрема, через фільтр нижніх частот, гранична частота якого залежить від типу рейкового гальма. При цьому величина граничної частоти фільтра є меншою 50 Гц. Підвищення надійності розпізнавання локальних екстремальних значень досягається тим, що різниця інтегралу величини струму з локальним екстремальним значенням відповідає принаймні 30 % різниці інтегралу, введеного в пам'ять опорного струму, причому обидва ці інтеграли в разі потреби визначаються в одному і тому ж інтервалі часу. Для розпізнавання магнітного зчеплення між гальмовим магнітом і рейкою може охоплюватися також часовий інтервал (t2-t1) локальних екстремальних значень, і з ними проводитися порівняння стандартного сигналу. Таким чином, обчислення проводиться в інтервалі часу t2-t1, в межах якого відбувається змінення струму від локального максимуму e max до локального мінімуму e min. При цьому в кращому варіанті обчислюються лише ті криві струму, на яких різниця дельта є між локальним максимумом e max і локальним мінімумом e min перевищує певне, наперед задане граничне значення. При цьому також може визначатися інтеграл різниці між виміряною кривою струму та введеною в пам'ять опорною кривою струму. Може бути створений також інтеграл різниці між фактичною кривою струму та опорною кривою струму, яка проходить від точки часу першого екстремального значення (e max, Фіг. 4) по екстрапольованому відтинку кривої до досягнення номінального струму / nen. У цьому випадку також може визначатися певне межове значення, що залежить від типу рейкового гальма, а наявність магнітного зчеплення між гальмовим магнітом і рейкою буде розпізнаватися за перевищенням струмом цього межового значення. Таке обчислення з екстрапольованим відтинком кривої також може проводитися в межах певного часового інтервалу, в котрому повинно перевищуватися певне межове значення, що залежить від типу рейкового гальма. Може використовуватися також інший критерій, згідно з яким струм у локальному мінімумі e min у межах часового інтервалу від t2-x до t2+x перевищує середнє значення струму. Інтервал часу х тут залежить від типу рейкового гальма і становить не більше 1 секунди. Можливим є також застосування критерію, суть якого полягає в тому, що безперервно одержують різницю Delta і між вимірюваним струмом i4 та опорним струмом i3, яка показана кривою Delta і на Фіг. 4. По кривій Delta і визначають точку t3 часу максимального значення Delta і та стежать за тим, щоб вона перебувала в межах часового інтервалу від t2-x до t2+x. Якщо ця умова виконується, то це означає, що відповідно до даного критерію має місце магнітне зчеплення між гальмовим магнітом і рейкою. Із діаграми вимірювання, представленої на Фіг. 4, можна добре бачити, що максимальне значення різниці max(Delta і) може лежати також за межами періоду часу від t1 до t2, звідки є цілком зрозумілим, що вищезазначений 4 UA 99772 C2 5 10 часовий інтервал повинен лежати по обидві сторони від t2. Замість розглянутої вище різниці може створюватися також її інтеграл та обчислюватися його максимальне значення. І нарешті, помилки, зумовлені коливанням напруги батареї живлення, зміненням температури магнітних котушок рейкового гальма і/або температури силового вимикача 5, можуть усуватися шляхом нормування введеної в пам'ять заданої кривої опорного струму по відношенню до напруги батареї живлення, температури магнітних котушок рейкового гальма і/або температури силового вимикача 5. Напруга батареї живлення і температура силового вимикача 5 виміряються за допомогою вимірювального підсилювача 17 для напруги батареї живлення і вимірювальних підсилювачів 14 і 15 для температури силового вимикача. Температура магнітних котушок рейкового гальма, як було описано вище, визначається непрямим чином шляхом вимірювання стаціонарного струму через індуктивності L1 і L2. Стаціонарним є струм, який має величину більше 0, а часова похідна якого di/dt дорівнює 0. ФОРМУЛА ВИНАХОДУ 15 20 25 30 35 40 45 50 55 1. Спосіб робочого моніторингу рейкових гальм, згідно з яким через обмотку гальмового магніту перепускають електричний струм, спосіб включає наступні стадії: - вимірювання електричного струму (i2, i4) і - порівняння часових кривих виміряного струму з уведеною в пам'ять часовою кривою опорного струму (i1, i3). 2. Спосіб за п. 1, який відрізняється тим, що порівняння проводять шляхом створення різниці між вимірюваним струмом (i2, i4) та опорним струмом (i1, i3). 3. Спосіб за п. 2, який відрізняється тим, що різницю між вимірюваним струмом (i2, i4) та опорним струмом (i1, i3) інтегрують у часі. 4. Спосіб за одним з пп. 1-3, який відрізняється тим, що порівняння проводять лише в наперед заданому часовому інтервалі, в якому відбувається процес вмикання рейкового гальма, причому зазначений наперед заданий часовий інтервал є коротшим, ніж тривалість часу між вмиканням струму і досягненням номінального струму. 5. Спосіб за одним з пп. 1-4, який відрізняється тим, що струм через обмотку гальмового магніту перепускають імпульсами (Р1-Р4), а порівняння проводять заново на кожному імпульсі (Р1-Р4). 6. Спосіб за одним з пп. 1-5, який відрізняється тим, що визначають локальний мінімум (е min) і/або локальний максимум (е max) вимірюваного струму (i4) і що порівнянню з опорним струмом (i3) піддають лише часовий хід вимірюваного струму (i4), що містить зростання цього струму (i4). 7. Спосіб за п. 6, який відрізняється тим, що порівнянню з опорним струмом (i3) піддають лише хід вимірюваного струму (i4), що йде слідом за локальним мінімумом (е min). 8. Спосіб за пп. 6 або 7, який відрізняється тим, що при охопленні локального мінімуму (е min) і локального максимуму (е max) вимірюваного струму (i4) визначають інтеграл різниці між швидкістю змінення в часі вимірюваного струму (i4) та опорного струму (i3) впродовж наперед заданого інтервалу часу і порівнюють його з наперед заданою межовою величиною. 9. Спосіб за одним з пп. 1-8, який відрізняється тим, що визначають введений у пам'ять часовий хід опорного струму (i1, i3) в залежності від типу рейкового гальма. 10. Спосіб за одним з пп. 1-8, який відрізняється тим, що визначають введений у пам'ять часовий хід опорного струму (і1, i3) незалежно від типу рейкового гальма і проводять порівняння часового ходу вимірюваного струму з часовим ходом опорного струму в залежності від принаймні однієї межової величини, яка задається в залежності від типу рейкового гальма. 11. Спосіб за одним з пп. 6-10, який відрізняється тим, що проводять порівняння часового інтервалу (t1-t2) виникнення локального максимуму (е max) і локального мінімуму (е min) з відповідними величинами опорного сигналу. 12. Спосіб за одним з пп. 1-11, який відрізняється тим, що перед порівнянням вимірюваного струму (i2, i4) проводять його фільтрування фільтром нижніх частот. 13. Спосіб за п. 12, який відрізняється тим, що гранична частота фільтра нижніх частот є меншою 50 Гц. 14. Спосіб за одним з пп. 6-13, який відрізняється тим, що визначають різницю між локальним максимумом (е max) і локальним мінімумом (е min) величин струму і проводять її порівняння з наперед заданою межовою величиною. 15. Спосіб за п. 1, який відрізняється тим, що межова величина відповідає принаймні 30 % різниці опорного струму. 5 UA 99772 C2 5 10 15 16. Спосіб за одним з пп. 6-15, який відрізняється тим, що проводять порівняння з межовою величиною величини інтегралу різниці між вимірюваним струмом (i2, i4) та екстрапольованим відтинком кривої від точки часу першого екстремального значення (е max) до досягнення номінального струму (е nеnn). 17. Спосіб за п. 16, який відрізняється тим, що створюють різницю інтегралу в межах заданого часового вікна. 18. Спосіб за п. 17, який відрізняється тим, що зазначене часове вікно перекриває ділянку перед (t2-x) і після (t2+x) локального мінімуму (е min). 19. Спосіб за п. 18, який відрізняється тим, що проводять порівняння струму, виміряного в точці часу (t2) локального мінімуму (е min), з середнім значенням струму, виміряного у зазначеному часовому вікні. 20. Спосіб за одним з пп. 6-19, який відрізняється тим, що проводять контроль того, чи точка часу виникнення максимуму (max(Delta і)) різниці (Delta і) між фактичним струмом (і4) та опорним струмом (і3) лежить у межах заданого часового вікна (t2-x ÷ t2+x), де х є меншим 1 секунди. 21. Спосіб за одним з пп. 1-20, який відрізняється тим, що виміряну величину струму (і4) і/або опорного струму (і3) залежно від величини виміряного електричного струму (і4) нормують в стаціонарному стані цього струму. 6 UA 99772 C2 7 UA 99772 C2 8 UA 99772 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for operative monitoring track brakes
Автори англійськоюLehmann, Henry, Datzreiter, Josef, Daxecker, Franz, Schlager, Peter
Назва патенту російськоюСпособ рабочего мониторинга рельсовых тормозов
Автори російськоюЛехманн Хенри, Датцрайтер Йозеф, Даксеккер Франц, Шлагер Петер
МПК / Мітки
МПК: B61H 7/00, B60T 17/22
Мітки: робочого, спосіб, рейкових, моніторингу, гальм
Код посилання
<a href="https://ua.patents.su/11-99772-sposib-robochogo-monitoringu-rejjkovikh-galm.html" target="_blank" rel="follow" title="База патентів України">Спосіб робочого моніторингу рейкових гальм</a>
Спосіб визначення первинних параметрів кабельних та рейкових ліній рейкових кіл при центральному розміщенні апаратури
Номер патенту: 61018
Опубліковано: 11.07.2011
Автори: Романцев Іван Олегович, Гаврилюк Володимир Ілліч
МПК: B61L 25/06
Мітки: первинних, спосіб, ліній, параметрів, рейкових, кабельних, апаратури, кіл, розміщенні, центральному, визначення
Формула / Реферат:
Спосіб визначення первинних параметрів кабельних та рейкових ліній рейкових кіл при центральному розміщенні апаратури, при якому визначають робочий сигнальний струм та напругу на релейних та живильних кінцях, фазовий зсув між ними, вторинні та первинні параметри ліній, який відрізняється тим, що проводять запис вказаних електричних величин при проходженні рухомого складу, далі визначають первинні параметри кабельних ліній, після чого...
Спосіб вимірювання параметрів кодового струму в рейкових колах без ізолюючих стиків
Номер патенту: 50742
Опубліковано: 25.06.2010
Автори: Романцев Іван Олегович, Гаврилюк Володимир Ілліч
МПК: B61L 25/00
Мітки: кодового, колах, ізолюючих, вимірювання, параметрів, рейкових, спосіб, стиків, струму
Формула / Реферат:
Спосіб вимірювання параметрів кодового струму в рейкових колах без ізолюючих стиків, при якому вимірюють даний струм через гальванічну розв'язку, який відрізняється тим, що в рейкових колах при відсутності ізолюючого стику (ІС) на вхідному кінці рейкового кола вимірюють струм на станції або в релейній шафі при вступі потягу на зону додаткового шунтування (ЗДШ) перед колійним приймачем на елементі, що може сприймати частоту кодового струму;...
Спосіб автоматизованого контролю параметрів рейкових кіл
Номер патенту: 50926
Опубліковано: 25.06.2010
Автор: Сердюк Тетяна Миколаївна
МПК: B61L 25/00
Мітки: контролю, автоматизованого, спосіб, параметрів, рейкових, кіл
Формула / Реферат:
Спосіб автоматизованого контролю параметрів рейкових кіл (РК), який реалізується при виконанні планових контрольних поїздок вагона-лабораторії і пов'язаний з вимірюванням під час руху значення сигнального струму в РК з наступним аналого-цифровим перетворенням та записом на електронний накопичувач комп'ютера вагона-лабораторії, який відрізняється тим, що визначення параметрів рейкових кіл виконують на основі виміру електрорушійної сили з...
Спосіб автоматизованого виявлення дефектів тональних рейкових кіл
Номер патенту: 50925
Опубліковано: 25.06.2010
Автори: Завгородній Олександр Вікторович, Сердюк Тетяна Миколаївна, Гаврилюк Володимир Ілліч
МПК: B61L 25/00
Мітки: тональних, виявлення, кіл, автоматизованого, спосіб, дефектів, рейкових
Формула / Реферат:
Спосіб автоматизованого виявлення дефектів тональних рейкових кіл (РК), який реалізується при централізованому розміщенні апаратури, при якому в процесі планових поїздок вагона-лабораторії вимірюють значення сигнального струму в РК з наступним аналого-цифровим перетворенням та записом на електронний накопичувач комп'ютера вагона-лабораторії, який відрізняється тим, що виявлення дефектів рейкових кіл виконують на основі одночасної обробки...
Спосіб виготовлення колодок дискових гальм
Номер патенту: 77542
Опубліковано: 15.12.2006
Автор: Іщенко Павло Дмитрович
МПК: F16D 69/00, F16D 69/02, C09J 5/02
Мітки: гальм, колодок, дискових, спосіб, виготовлення
Формула / Реферат:
Спосіб виготовлення колодок дискових гальм з полімерного матеріалу, який містить полімерне зв'язуюче, органічний модифікатор, волокнистий наповнювач, металомісткі сполуки, фрикційний та неорганічний модифікатори, включає змішування інгредієнтів та формування брикетів, які зафіксовують на металевій пластині, при цьому поверхню металевої пластини з боку приформування полімерного матеріалу виконують шорсткою, який відрізняється тим, що...
Попередній патент: Штифт для прикріплення вкладиша насоса (варіанти) і корпус насоса (варіанти)
Наступний патент: Смоктальна композиція для лікування запальних захворювань порожнини рота та глотки
Випадковий патент: Спосіб виготовлення порошкового дроту