Спосіб і пристрій для керування мережецентричною системою конфліктних швидкісних циклів динамічних прикладних процесів
Номер патенту: 114817
Опубліковано: 10.08.2017
Автори: Богачук Юрій Петрович, Гриценко Володимир Ілліч, Павлова Світлана Вадимівна, Павлов Вадим Володимирович
Формула / Реферат
1. Спосіб для керування мережецентричною системою конфліктних швидкісних циклів динамічних прикладних процесів, в якому циклічно із заданим періодом дискретизації дані про поточний стан прикладного процесу кодують і формують в пакет даних прикладного процесу, який містить дані про поточний стан прикладного процесу і час формування пакета даних прикладного процесу, пакет даних прикладного процесу передають в комп'ютерну мережу, пакет даних прикладного процесу приймають з комп'ютерної мережі, дані про поточний стан прикладного процесу використовують як початкові умови для моделювання динаміки прикладного процесу, задають часовий інтервал моделювання як сумарний час прогнозованих затримок передачі по мережі пакетів даних прикладного процесу і пакетів команд керування спільно з часом моделювання динаміки прикладного процесу і буферним часом компенсації варіацій затримок передачі пакетів по мережі, для кожного прийнятого пакета даних прикладного процесу в прискореному масштабі часу на часовому інтервалі моделювання моделюють динаміку прикладного процесу спільно з моделюванням процесу формування команд керування, команди керування, які відповідають кінцевій точці часового інтервалу моделювання, розміщують в пакеті команд керування, в якому розміщують також час передачі команд керування в прикладний процес, який визначають як суму часу формування пакета даних прикладного процесу і часового інтервалу моделювання, пакет команд керування передають в комп'ютерну мережу, з комп'ютерної мережі приймають пакети команд керування, прийняті пакети команд керування розміщують в черзі буферизації команд, відповідно із заданим періодом дискретизації, з черги буферизації команд витягують той пакет команд керування, у якому значення часу передачі команд керування в прикладний процес відповідає поточному часу прикладного процесу, декодують пакет команд керування, декодовані команди керування передають в прикладний процес, який відрізняється тим, що виконують часову синхронізацію складових частин пакета даних прикладного процесу, потім, цей пакет даних прикладного процесу без реєстрації розміщують в черзі буферизації даних, незареєстрований пакет даних прикладного процесу з черги буферизації даних використовують для формування початкових умов моделювання динаміки прикладного процесу, після чого пакет даних прикладного процесу реєструють в черзі буферизації даних, спочатку встановлюють часовий інтервал віртуальної синхронізації, що дорівнює сумарній кількості часових інтервалів заданої дискретизації, які без остачі укладаються в прогнозований час затримки передачі пакетів даних прикладного процесу по мережі, кінцеву межу часового інтервалу віртуальної синхронізації на початку кожного циклу суміщають з поточним моментом часу, і тоді початкова межа цього часового інтервалу віртуальної синхронізації задає час віртуальної генерації, перевіряють в черзі буферизації даних наявність зареєстрованого пакета даних прикладного процесу з часом формування, відповідним заданому часу віртуальної генерації, і якщо в черзі буферизації даних такий пакет відсутній, то генерують віртуальний пакет даних, в якому розміщують взятий з черги буферизації даних зареєстрований пакет даних прикладного процесу, час формування якого найближчий до заданого часу віртуальної генерації і до поточного часу, визначають інтервал віртуального розузгодження між часом формування зареєстрованого пакета даних прикладного процесу, що розміщений у віртуальному пакеті даних, і заданим часом віртуальної генерації, дані про стан віртуального процесу, витягнуті з віртуального пакета даних, використовують як початкові умови для моделювання динаміки віртуального процесу, формують віртуальний часовий інтервал моделювання, змінюючи заданий часовий інтервал моделювання на величину інтервалу віртуального розузгодження, для кожного згенерованого віртуального пакета даних в прискореному масштабі часу на віртуальному часовому інтервалі моделювання моделюють динаміку віртуального процесу спільно з моделюванням процесу формування команд віртуального керування, команди віртуального керування, що відповідають кінцевій точці віртуального часового інтервалу моделювання, розміщують в віртуальному пакеті команд керування, в якому розміщують також час передачі команд керування в прикладний процес, який визначають як суму часу віртуальної генерації і віртуального часового інтервалу моделювання, в віртуальному пакеті команд керування, який формують на основі віртуального пакета даних, додатково розміщують ознаку віртуальності, віртуальний пакет команд керування передають в комп'ютерну мережу, задають часовий інтервал контролю віртуалізації, задають також нижню і верхню межі рівня віртуалізації, періодично, упродовж часового інтервалу контролю віртуалізації, визначають сумарне число віртуальних пакетів команд керування і сумарне число усіх пакетів команд керування, які прийняті в чергу буферизації команд, у кінці інтервалу контролю віртуалізації, по співвідношенню цих двох чисел, визначають поточний рівень віртуалізації, генерують негативний або позитивний сигнал корекції, якщо поточний рівень віртуалізації виходить за нижню або за верхню задані межі рівня віртуалізації відповідно, сигнал корекції кодують і формують в пакет сигналу корекції, пакет сигналу корекції передають в комп'ютерну мережу, приймають з комп'ютерної мережі пакет сигналу корекції, з якого витягують сигнал корекції, згідно з яким виконують корекцію часового інтервалу віртуальної синхронізації шляхом зменшення або збільшення поточного часового інтервалу віртуальної синхронізації на величину часу інтервалу заданої дискретизації відповідно до знаку полярності сигналу корекції, якщо при виконанні корекції поточний часовий інтервал віртуальної синхронізації зменшується, то генерацію віртуального пакета даних протягом одного циклу послідовно виконують двічі відповідно для поточного і скоректованого значень інтервалу віртуальної синхронізації, якщо в черзі буферизації команд розміщені пакети команд керування з однаковим часом передачі команд керування в прикладний процес, то для передачі команд керування в прикладний процес з черги буферизації команд витягують той пакет команд керування, у якому відсутня ознака віртуальності.
2. Пристрій для керування мережецентричною системою конфліктних швидкісних циклів динамічних прикладних процесів, який містить блок датчиків прикладного процесу, вихід якого підключений через блок кодування даних прикладного процесу до входу блока передачі пакетів даних прикладного процесу, вихід якого підключений до входу комп'ютерної мережі, блок прийому пакетів команд керування, який входом підключений до виходу комп'ютерної мережі, а виходом до входу блока буферизації команд, вихід якого з'єднаний через блок декодування з входом блока регуляторів прикладного процесу, вхід блока прийому пакетів даних прикладного процесу підключений до виходу комп'ютерної мережі, вихід блока керування моделюванням з'єднаний з першим входом блока моделювання динаміки прикладного процесу, вихід якого з'єднаний з входом блока команд керування, перший вихід якого підключений до другого входу блока моделювання динаміки прикладного процесу, другий вихід блока команд керування з'єднаний через блок кодування команд керування з входом блока передачі пакетів команд керування, вихід якого підключений до входу комп'ютерної мережі, який відрізняється тим, що в нього введені блок часової синхронізації, блок буферизації даних, блок формування інтервалу віртуальної синхронізації, блок керування віртуальною синхронізацією, блок формування віртуального пакета, блок моделювання динаміки віртуального процесу, блок команд віртуального керування, блок прийому сигналу корекції, блок кодування сигналу корекції, блок передачі пакета сигналу корекції, блок формування сигналу корекції, який входом підключений до другого виходу блока буферизації команд, а виходом до входу блока кодування сигналу корекції, вихід якого підключений через блок передачі пакета сигналу корекції до входу комп'ютерної мережі, вихід блока прийому пакетів даних прикладного процесу через блок часової синхронізації підключений до першого входу блока буферизації даних, перший вихід якого підключений до входу блока керування моделюванням, блок прийому сигналу корекції, який входом підключений до виходу комп'ютерної мережі, а виходом через блок формування інтервалу віртуальної синхронізації до першого входу блока керування віртуальною синхронізацією, перший вихід якого з'єднаний з другим входом блока буферизації даних, другий вихід якого підключений до другого входу блока керування віртуальною синхронізацією, другий вихід якого з'єднаний через блок формування віртуального пакета з першим входом блока моделювання динаміки віртуального процесу, вихід якого з'єднаний з входом блока команд віртуального керування, перший вихід якого підключений до другого входу блока моделювання динаміки віртуального процесу, другий вихід блока команд віртуального керування з'єднаний з другим входом блока кодування команд керування.
Текст
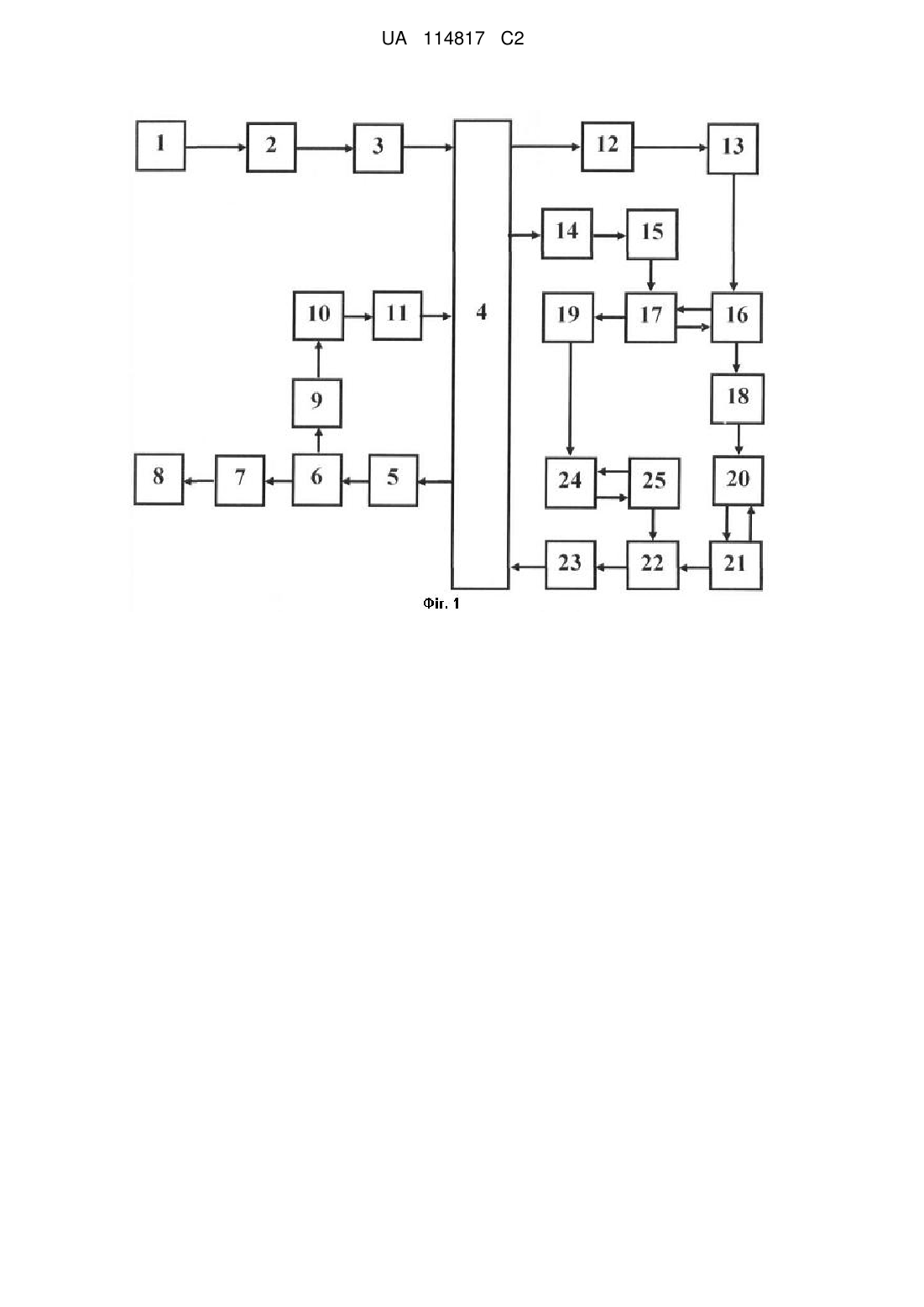
Реферат: Винахід належить до автоматики, обчислювальної техніки, систем передачі і використання інформації і може бути застосований для мережецентричного керування в швидкісних циклах динамічних прикладних процесів у розподіленому комп'ютерному середовищі в реальному масштабі часу. Технічний результат запропонованих способу для керування мережецентричною системою конфліктних швидкісних циклів динамічних прикладних процесів та пристрою для його здійснення досягається за рахунок генерації в мережецентричній системі асинхронного комплексу віртуальних циклів, який дозволяє компенсувати втрати пакетів даних у мережі, підвищити рівень синхронізації мережецентричних інформаційних потоків при значних затримках передачі пакетів даних, а також усунути конфліктність, котра властива характеру формування команд мережецентричного керування. Мережецентричні віртуальні цикли генеруються асинхронно і тільки в ті моменти часу, коли порушується синхронність реальних швидкісних циклів. Додавання асинхронно генерованих віртуальних циклів до мережецентричної системи реальних швидкісних циклів забезпечує в критичних умовах роботи системи досягнення цілей керування, підвищення якості і збільшення стійкості мережецентричного керування швидкісними циклами динамічних прикладних процесів у розподіленому комп'ютерному середовищі в реальному масштабі часу. UA 114817 C2 (12) UA 114817 C2 UA 114817 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до автоматики, обчислювальної техніки, систем передачі і використання інформації, і може бути застосований для мережецентричного керування в швидкісних циклах динамічних прикладних процесів в розподіленому комп'ютерному середовищі в реальному масштабі часу. Нині основним напрямом в організації систем мережецентричного керування швидкісними циклами динамічних прикладних процесів є розробка комп'ютерно-комунікаційних мереж з широким застосуванням супутникових технологій навігації і зв'язку. Так, наприклад, інформаційні технології типу CNS/ATM по своїм потенційним можливостям дозволяють реалізувати мережецентричне динамічне керування швидкісними циклами повітряного судна в реальному масштабі часу на основі методів багатопараметричного моделювання з використанням комплексних баз даних характеристик повітряних судів. Підґрунтям мережецентричного інформаційного обміну в розподіленому комп'ютерному середовищі є методи пакетної передачі інформації, при яких інтегральна інформація про стан системи приходить з різних ділянок мережі з різними рівнями часових затримок при передачі пакетів даних, що призводить до розсинхронізації системи мережецентричних інформаційних потоків і збільшує вірогідність втрати пакетів даних. Присутність високого рівня розсинхронізації в інформаційних потоках мережецентричної системи негативно позначається на якості і стійкості керування мережецентричними швидкісними циклами, якими, в системному значенні, являються мережецентричні цикли з періодами дискретизації даних меншими, ніж часові затримки передачі пакетів даних в мережі. Для якісного керування мережецентричною системою швидкісних циклів динамічних прикладних процесів необхідно, з однієї сторони, з максимальною синхронністю формувати команди керування в реальному масштабі часу і, одночасно з іншої сторони, збільшувати часові затримки для отримання повної інформації про поточний стан об'єкта керування. Внутрісистемна суперечність цих вимог обумовлює конфліктний характер формування команд мережецентричного керування. Наявність в мережецентричних системах високих рівнів системної розсинхронізації інформаційних потоків, втрати пакетів даних та конфліктний характер формування команд мережецентричного керування істотно знижують якість і стійкість керування конфліктними швидкісними циклами динамічних прикладних процесів, аж до невиконання цілей керування, що може призвести навіть до функціонального розпаду мережецентричної системи. Відомий спосіб і пристрій для керування мережецентричною системою конфліктних швидкісних циклів динамічних прикладних процесів (cm US8301332, ЕР2434450 А1), в якому циклічно із заданим періодом дискретизації дані про поточний стан прикладного процесу кодують і формують в пакет даних прикладного процесу, який містить дані про поточний стан прикладного процесу і час формування пакета даних прикладного процесу, пакет даних прикладного процесу передають в комп'ютерну мережу, з комп'ютерної мережі приймають і буферизують пакети команд керування, відповідно до заданого періоду дискретизації витягують з черги буферизації і декодують пакет команд керування, декодовані команди керування передають в прикладний процес. Недоліками відомого способу і пристрою є їх відносно низькі функціонально-динамічні і технічні характеристики, які не забезпечують можливості досягнення цілей мережецентричного керування швидкісними циклами динамічних прикладних процесів із-за наявності в системі часових затримок передачі інформаційних потоків. Є відомим також спосіб і пристрій для керування мережецентричною системою конфліктних швидкісних циклів динамічних прикладних процесів (cм UA8318, RU2422888, WO2008030206,), в якому циклічно із заданим періодом дискретизації дані про поточний стан прикладного процесу кодують і формують в пакет даних прикладного процесу, який містить дані про поточний стан прикладного процесу і час формування пакета даних прикладного процесу, пакет даних прикладного процесу передають в комп'ютерну мережу, пакет даних прикладного процесу приймають з комп'ютерної мережі, дані про поточний стан прикладного процесу використовують як початкові умови для моделювання динаміки прикладного процесу, задають часовий інтервал моделювання як сумарний час прогнозованих затримок передачі по мережі пакетів даних прикладного процесу і пакетів команд керування спільно з часом моделювання динаміки прикладного процесу і буферним часом компенсації варіацій затримок передачі пакетів по мережі, для кожного прийнятого пакета даних прикладного процесу в прискореному масштабі часу на часовому інтервалі моделювання моделюють динаміку прикладного процесу спільно з моделюванням процесу формування команд керування, команди керування, які відповідають кінцевій точці часового інтервалу моделювання, розміщують в пакеті команд керування, в якому розміщують також час передачі команд керування в прикладний процес, який визначають як 1 UA 114817 C2 5 10 15 20 25 30 35 40 45 50 55 60 суму часу формування пакету даних прикладного процесу і часового інтервалу моделювання, пакет команд керування передають в комп'ютерну мережу, з комп'ютерної мережі приймають пакети команд керування, прийняті пакети команд керування розміщують в черзі буферизації команд, відповідно із заданим періодом дискретизації, з черги буферизації команд витягують той пакет команд керування, у якому значення часу передачі команд керування в прикладний процес відповідає поточному часу прикладного процесу, декодують пакет команд керування, декодовані команди керування передають в прикладний процес. Недоліками відомого способу і пристрою є те, що їх застосування не забезпечує необхідну якість і стійкість мережецентричного керування конфліктними швидкісними циклами динамічних прикладних процесів та не дозволяє досягти цілей мережецентричного керування при наявності в системі розсинхронізації інформаційних потоків, втрати пакетів даних і конфліктного характеру формування команд мережецентричного керування. Задачею винаходу є розробка способу і пристрою для керування мережецентричною системою конфліктних швидкісних циклів динамічних прикладних процесів, які забезпечили б інваріантну і безконфліктну синхронізацію інформаційних потоків в розподіленому комп'ютерному середовищі в реальному масштабі часу, і дозволили б значно підвищити якість і стійкість мережецентричного керування конфліктними швидкісними циклами динамічних прикладних процесів. Поставлена задача вирішується тим, що виконують часову синхронізацію складових частин пакета даних прикладного процесу, потім, цей пакет даних прикладного процесу без реєстрації розміщують в черзі буферизації даних, незареєстрований пакет даних прикладного процесу з черги буферизації даних використовують для формування початкових умов моделювання динаміки прикладного процесу, після чого пакет даних прикладного процесу реєструють в черзі буферизації даних, спочатку встановлюють часовий інтервал віртуальної синхронізації, що дорівнює сумарній кількості часових інтервалів заданої дискретизації, які без остачі укладаються в прогнозований час затримки передачі пакетів даних прикладного процесу по мережі, кінцеву межу часового інтервалу віртуальної синхронізації на початку кожного циклу суміщають з поточним моментом часу, і тоді початкова межа цього часового інтервалу віртуальної синхронізації задає час віртуальної генерації, перевіряють в черзі буферизації даних наявність зареєстрованого пакету даних прикладного процесу з часом формування, відповідним заданому часу віртуальної генерації, і якщо в черзі буферизації даних такий пакет відсутній, то генерують віртуальний пакет даних, в якому розміщують взятий з черги буферизації даних зареєстрований пакет даних прикладного процесу, час формування якого найближчий до заданого часу віртуальної генерації і до поточного часу, визначають інтервал віртуального розузгодження між часом формування зареєстрованого пакету даних прикладного процесу, що розміщений у віртуальному пакеті даних, і заданим часом віртуальної генерації, дані про стан віртуального процесу, витягнуті з віртуального пакета даних, використовують як початкові умови для моделювання динаміки віртуального процесу, формують віртуальний часовий інтервал моделювання, змінюючи заданий часовий інтервал моделювання на величину інтервалу віртуального розузгодження, для кожного згенерованого віртуального пакета даних в прискореному масштабі часу на віртуальному часовому інтервалі моделювання моделюють динаміку віртуального процесу спільно з моделюванням процесу формування команд віртуального керування, команди віртуального керування, що відповідають кінцевій точці віртуального часового інтервалу моделювання, розміщують в віртуальному пакеті команд керування, в якому розміщують також час передачі команд керування в прикладний процес, який визначають як суму часу віртуальної генерації і віртуального часового інтервалу моделювання, в віртуальному пакеті команд керування, який формують на основі віртуального пакета даних, додатково розміщують ознаку віртуальності, віртуальний пакет команд керування передають в комп'ютерну мережу, задають часовий інтервал контролю віртуалізації, задають також нижню і верхню межі рівня віртуалізації, періодично, упродовж часового інтервалу контролю віртуалізації, визначають сумарне число віртуальних пакетів команд керування і сумарне число усіх пакетів команд керування, які прийняті в чергу буферизації команд, у кінці інтервалу контролю віртуалізації, по співвідношенню цих двох чисел, визначають поточний рівень віртуалізації, генерують негативний або позитивний сигнал корекції, якщо поточний рівень віртуалізації виходить за нижню або за верхню задані межі рівня віртуалізації відповідно, сигнал корекції кодують і формують в пакет сигналу корекції, пакет сигналу корекції передають в комп'ютерну мережу, приймають з комп'ютерної мережі пакет сигналу корекції, з якого витягують сигнал корекції, згідно з яким виконують корекцію часового інтервалу віртуальної синхронізації шляхом зменшення або збільшення поточного часового інтервалу віртуальної синхронізації на величину часу інтервалу заданої дискретизації відповідно до знаку полярності 2 UA 114817 C2 5 10 15 20 25 30 35 40 45 50 55 60 сигналу корекції, якщо при виконанні корекції поточний часовий інтервал віртуальної синхронізації зменшується, то генерацію віртуального пакету даних протягом одного циклу послідовно виконують двічі відповідно для поточного і скоректованого значень інтервалу віртуальної синхронізації, якщо в черзі буферизації команд розміщені пакети команд керування з однаковим часом передачі команд керування в прикладний процес, то для передачі команд керування в прикладний процес з черги буферизації команд витягують той пакет команд керування, у якому відсутня ознака віртуальності. В подальшому винахід пояснюється описом конкретного прикладу його виконання і кресленнями, що додаються. На Фіг. 1 - блок-схема пристрою. На Фіг. 2 - структура пакета даних прикладного процесу. На Фіг. 3 - структура часового інтервалу моделювання. На Фіг. 4 - структура пакета команд керування. На Фіг. 5 - структура пакета команд керування з ознакою віртуальності. Суть запропонованого способу і пристрою для керування мережецентричною системою конфліктних швидкісних циклів динамічних прикладних процесів пояснюється на прикладі опису роботи схеми технічної реалізації винаходу, зображеної на Фіг. 1. Пристрій (Фіг. 1) містить блок датчиків прикладного процесу 1, вихід якого підключений через блок кодування даних прикладного процесу 2 до входу блока передачі пакетів даних прикладного процесу 3, вихід якого підключений до входу комп'ютерної мережі 4, блок прийому пакетів команд керування 5, який входом підключений до виходу комп'ютерної мережі 4, а виходом до входу блока буферизації команд 6, перший вихід якого з'єднаний через блок декодування 7 з входом блока регуляторів прикладного процесу 8, вхід блока прийому пакетів даних прикладного процесу 12 підключений до виходу комп'ютерної мережі 4, вихід блока керування моделюванням 18 з'єднаний з першим входом блока моделювання динаміки прикладного процесу 20, вихід якого з'єднаний з входом блока команд керування 21, перший вихід якого підключений до другого входу блока моделювання динаміки прикладного процесу 20, другий вихід блока команд керування 21 з'єднаний з першим входом блока кодування команд керування 22, вихід якого з'єднаний з входом блока передачі пакетів команд керування 23, вихід якого підключений до входу комп'ютерної мережі 4, блок формування сигналу корекції 9, який входом підключений до другого виходу блока буферизації команд 6, а виходом до входу блока кодування сигналу корекції 10, вихід якого підключений через блок передачі пакета сигналу корекції 11 до входу комп'ютерної мережі 4, вихід блока прийому пакетів даних прикладного процесу 12 через блок часової синхронізації 13 підключений до першого входу блока буферизації даних 16, перший вихід якого підключений до входу блока керування моделюванням 18, блок прийому сигналу корекції 14, який входом підключений до виходу комп'ютерної мережі 4, а виходом через блок формування інтервалу віртуальної синхронізації 15 до першого входу блока керування віртуальною синхронізацією 17, перший вихід якого з'єднаний з другим входом блока буферизації даних 16, другий вихід якого підключений до другого входу блока керування віртуальною синхронізацією 17, другий вихід якого з'єднаний через блок формування віртуального пакету 19 з першим входом блока моделювання динаміки віртуального процесу 24, вихід якого з'єднаний з входом блока команд віртуального керування 25, перший вихід якого підключений до другого входу блока моделювання динаміки віртуального процесу 24, другий вихід блока команд віртуального керування 25 з'єднаний з другим входом блока кодування команд керування 22. На виході блока датчиків прикладного процесу 1 формуються дані про поточний стан прикладного процесу, які надходять на вхід блока кодування даних прикладного процесу 2. Блок кодування даних прикладного процесу 2 циклічно із заданим періодом дискретизації t d перетворює вхідні сигнали про поточний стан прикладного процесу в цифровий код і здійснює процедури стиснення інформації і формування пакета даних прикладного процесу, структура якого приведена на Фіг. 2. До складу пакета даних прикладного процесу входять дані поточного стану прикладного процесу і час формування пакета даних прикладного процесу t dn . Сформовані пакети даних прикладного процесу надходять на вхід блока передачі пакетів даних прикладного процесу 3, який виконує передачу по інтернет-протоколах пакетів даних прикладного процесу в комп'ютерну мережу 4. У мережецентричній системі швидкісних циклів динамічних прикладних процесів блок датчиків прикладного процесу 1 складається з набору датчиків, які є його складовими частинами і, як правило, розташовуються в різних ділянках мережецентричної системи. Подібну структуру мають також блок кодування даних прикладного процесу 2 і блок передачі пакетів 3 UA 114817 C2 5 10 15 20 25 30 35 40 45 50 55 даних прикладного процесу 3. Таким чином, пакети даних з різних ділянок мережецентричної системи приходять з різними рівнями часових затримок, а це, у свою чергу, обумовлює часову розсинхронізацію складових частин пакету даних прикладного процесу на виході комп'ютерної мережі 4. Блок прийому пакетів даних прикладного процесу 12 з комп'ютерної мережі 4 приймає розсинхронізовані пакети даних прикладного процесу, які з виходу блока прийому пакетів даних прикладного процесу 12 поступають на вхід блока часової синхронізації 13. Блок часової синхронізації 13 виконує часову синхронізацію складових частин пакета даних прикладного процесу, синхронізуючи їх за часом формування. З виходу блока часової синхронізації 13 пакет даних прикладного процесу надходить на перший вхід блока буферизації даних 16, де цей пакет даних прикладного процесу розміщують в черзі буферизації даних без реєстрації. Незареєстровані пакети даних прикладного процесу витягуються з черги буферизації блока буферизації даних 16. Потім, незареєстровані пакети даних прикладного процесу з першого виходу блока буферизації даних 16 передаються на вхід блока керування моделюванням 18. Після цієї передачі незареєстровані пакети даних прикладного процесу отримують в черзі буферизації блока буферизації даних 16 статус зареєстрованого пакета даних прикладного процесу. Зареєстровані в черзі буферизації блока буферизації даних 16 пакети даних прикладного процесу надалі використовуються для ідентифікації пропущених в часовій послідовності пакетів даних прикладного процесу. Блок керування моделюванням 18 по кожному пакету даних прикладного процесу, прийнятому від блока буферизації даних 16, формує сигнали початкових умов для моделювання динаміки прикладного процесу і сигнал часу формування пакета даних прикладного процесу t dn . Крім того, блок керування моделюванням 18 задає часовий інтервал моделювання t (див. Фіг. 3) як сумарний час прогнозованих затримок передачі по мережі пакетів даних прикладного процесу t 1 і пакетів команд керування t 2 спільно з часом моделювання динаміки прикладного процесу t 3 і буферним часом компенсації варіацій затримок передачі пакетів по мережі t 4 , тобто t t1 t2 t3 t 4 . З виходу блока керування моделюванням 18 сигнали початкових умов для моделювання динаміки прикладного процесу, сигнал заданого часового інтервалу моделювання t і сигнал часу формування пакета даних прикладного процесу t dn надходять на перший вхід блока моделювання динаміки прикладного процесу 20, який по кожному комплексу сигналів початкових умов для моделювання динаміки прикладного процесу визначає час передачі команд керування в прикладний процес t cn і починає в прискореному масштабі часу на часовому інтервалі моделювання t моделювати динаміку прикладного процесу. Час передачі команд керування в прикладний процес t cn визначається як сума часу формування пакета даних прикладного процесу t dn і часового інтервалу моделювання t (тобто tcn tdn t ). З виходу блока моделювання динаміки прикладного процесу 20 сигнали стану прикладного процесу, що моделюється, і сигнал часу передачі команд керування в прикладний процес t cn надходять на вхід блока команд керування 21, який по сигналах стану прикладного процесу, що моделюється, моделює процес формування команд керування, які з першого виходу блока команд керування 21 передаються на другий вхід блока моделювання динаміки прикладного процесу 20, моделюючи таким чином зміну поточного стану прикладного процесу, що моделюється, під дією модельованих команд керування. Моделювання в прискореному масштабі часу динаміки прикладного процесу спільно з моделюванням процесу формування команд керування закінчується при досягненні кінцевої точки часового інтервалу моделювання t , в якій значення команд керування відповідають прогнозованому часу передачі команд керування в прикладний процес t cn . З другого виходу блока команд керування 21 сигнали команд керування, відповідні прогнозованому часу передачі команд керування в прикладний процес t cn , і сигнал часу передачі команд керування в прикладний процес t cn передаються на перший вхід блока кодування команд керування 22, який здійснює процедури стиснення інформації і формування пакетів команд керування, структура якого приведена на Фіг. 4. До складу пакета команд керування входять команди керування, які відповідають прогнозованому часу передачі команд керування в прикладний процес t cn , і сигнал часу передачі команд керування в прикладний процес t cn . 4 UA 114817 C2 Блок формування інтервалу віртуальної синхронізації 15 спочатку встановлює часовий інтервал віртуальної синхронізації t S , що дорівнює сумарній кількості часових інтервалів 5 10 15 20 25 30 35 40 45 заданої дискретизації t d , які без остачі укладаються в прогнозований час затримки передачі пакетів даних прикладного процесу по мережі t 1 . Тобто, t S q t d , де q - неповна частка від ділення прогнозованого часу затримки передачі пакетів даних прикладного процесу по мережі t 1 на заданий період дискретизації t d . З виходу блока формування інтервалу віртуальної синхронізації 15 часовий інтервал віртуальної синхронізації t S надходить на перший вхід блока керування віртуальною синхронізацією 17, який на початку кожного циклу поєднує кінцеву межу часового інтервалу віртуальної синхронізації t S з поточним моментом часу t , і тоді початкова межа цього часового інтервалу віртуальної синхронізації визначає час віртуальної генерації t dnV (тобто t dnV t t S ). З першого виходу блока керування віртуальною синхронізацією 17 посилається на другий вхід блока буферизації даних 16 запит про наявність в його черзі буферизації даних зареєстрованого пакета даних прикладного процесу з часом формування, відповідним часу віртуальної генерації t dnV . По запиту блока керування віртуальною синхронізацією 17 блок буферизації даних 16 виконує перевірку черги буферизації даних. Якщо в цій черзі буферизації даних запитаний пакет відсутній, то з черги буферизації даних блока буферизації даних 16 витягують зареєстрований пакет даних прикладного процесу, час формування якого t dnR є найближчим до заданого часу віртуальної генерації t dnV і до поточного часу і Зареєстрований пакет даних прикладного процесу з часом формування t dnR з другого виходу блока буферизації даних 16 передають на другий вхід блока керування віртуальною синхронізацією 17, з другого виходу якого цей зареєстрований пакет даних прикладного процесу з часом формування t dnR передають на вхід блока формування віртуального пакета 19. Блок формування віртуального пакета 19 генерує віртуальний пакет даних, в якому розміщує отриманий з черги буферизації даних зареєстрований пакет даних прикладного процесу з часом формування t dnR і визначає інтервал віртуального розузгодження t 5 між часом формування пакета даних прикладного процесу, що розміщений у віртуальному пакеті даних, t dnR і заданим часом віртуальної генерації t dnV , тобто t 5 t dnR t dnV . Таким чином, віртуальні пакети даних генеруються асинхронно тільки в ті моменти часу, коли потрібний пакет даних прикладного процесу є відсутній в синхронній часовій послідовності реальних пакетів даних. Генерація віртуальних пакетів даних забезпечує інваріантну, відносно втрати пакетів даних прикладного процесу, синхронізацію інформаційних потоків в розподіленому комп'ютерному середовищі. Блок формування віртуального пакета 19 по кожному віртуальному пакета даних формує сигнали початкових умов для моделювання динаміки віртуального процесу і сигнал часу віртуальної генерації t dnV . Крім того, блок формування віртуального пакета 19 формує віртуальний часовий інтервал моделювання t V , змінюючи заданий часовий інтервал моделювання t на величину інтервалу віртуального розузгодження t 5 , тобто t V t t5 . З виходу блока формування віртуального пакета 19 сигнали початкових умов для моделювання динаміки віртуального процесу, сигнал віртуального часового інтервалу моделювання t V і сигнал часу віртуальної генерації t dnV надходять на перший вхід блока моделювання динаміки віртуального процесу 24, який по кожному комплексу сигналів початкових умов для моделювання динаміки віртуального процесу визначає час передачі команд керування в прикладний процес t cn і починає в прискореному масштабі часу на віртуальному часовому інтервалі моделювання 50 t V моделювати динаміку віртуального процесу. Час передачі команд керування в прикладний процес t cn визначається як сума часу віртуальної генерації t dnV і віртуального часового інтервалу моделювання t V , тобто t cn t dnV t V . З виходу блока моделювання динаміки віртуального процесу 24 сигнали стану віртуального процесу, що моделюється, і сигнал часу передачі команд керування в прикладний процес t cn 5 UA 114817 C2 5 10 15 20 25 30 35 40 45 50 55 надходять на вхід блоку команд віртуального керування 25, який по сигналах стану віртуального процесу, що моделюється, моделює процес формування команд віртуального керування, які з першого виходу блока команд віртуального керування 25 передаються на другий вхід блока моделювання динаміки віртуального процесу 24, моделюючи таким чином зміну поточного стану віртуального процесу, що моделюється, під дією модельованих команд віртуального керування. Моделювання в прискореному масштабі часу динаміки віртуального процесу спільно з моделюванням процесу формування команд віртуального керування закінчується при досягненні кінцевої точки віртуального часового інтервалу моделювання t V , в якому значення команд віртуального керування відповідають прогнозованому часу передачі команд керування в прикладний процес t cn . З другого виходу блока команд віртуального керування 25 сигнали команд віртуального керування, що відповідають прогнозованому часу передачі команд керування в прикладний процес t cn , сигнал часу передачі команд керування в прикладний процес t cn і сигнал ознаки віртуальності, передаються на другий вхід блока кодування команд керування 22, який здійснює процедури стиснення інформації і формування пакета команд керування, структура якого приведена на Фіг. 5. До складу цього пакета команд керування входять команди керування, що відповідають прогнозованому часу передачі команд керування в прикладний процес t cn , сигнал часу передачі команд керування в прикладний процес t cn і сигнал ознаки віртуальності. Генерація в мережецентричній системіасинхронних віртуальних пакетів дозволяє усунути конфліктність характеру формування команд керування, оскільки команди керування, які формуються по віртуальних пакетах при значних затримках реальних пакетів даних, орієнтовані на швидкодію, тоді як, команди керування, які формуються по реальних пакетах даних, орієнтовані на точність. Сформовані пакети команд керування з виходу блока кодування команд керування 22 надходять на вхід блока передачі пакетів команд керування 23, який виконує передачу по інтернет-протоколах пакетів команд керування в комп'ютерну мережу 4. Блок прийому команд керування 5 з комп'ютерної мережі 4 приймає пакети команд керування, які з виходу блока прийому пакетів команд керування 5 надходять на вхід блока буферизації команд 6. При досягненні поточним часом прикладного процесу значення часу передачі команд керування в прикладний процес t cn , з черги буферизації блока буферизації команд 6 витягується відповідний часу t cn пакет команд керування, який з першого виходу блока буферизації команд 6 надходить на вхід блока декодування 7. Якщо в черзі буферизації команд блока буферизації команд 6 розміщені пакети команд керування з однаковим часом передачі команд керування в прикладний процес, то для передачі команд керування в прикладний процес з черги буферизації команд витягують той пакет команд керування, у якому відсутня ознака віртуальності. З виходу блока декодування 7 декодовані команди керування надходять на вхід блока регуляторів прикладного процесу 8. Блок формування сигналу корекції 9 задає часовий інтервал контролю віртуалізації, а також задає нижню і верхню межі рівня віртуалізації. На вхід блока формування сигналу корекції 9 надходять сигнали з другого виходу буферизації команд 6. Блок формування сигналу корекції 9 періодично, упродовж часового інтервалу контролю віртуалізації, визначає сумарне число пакетів команд керування з ознакою віртуальності і сумарне число усіх пакетів команд керування, які прийняті в чергу буферизації команд блока буферизації команд 6. У кінці інтервалу контролю віртуалізації, відносно цих двох чисел, блок формування сигналу корекції 9 визначає поточний рівень віртуалізації. Блок формування сигналу корекції 9 генерує негативний або позитивний сигнал корекції, якщо поточний рівень віртуалізації виходить за нижню або за верхню задані межі рівня віртуалізації відповідно. Блок формування сигналу корекції 9 передає цей сигнал корекції на вхід блока кодування сигналу корекції 10. Блок кодування сигналу корекції 10 кодує сигнал корекції і формує пакет сигналу корекції, який з виходу блока кодування сигналу корекції 10 надходить на вхід блока передачі пакета сигналу корекції 11, який виконує передачу по інтернет-протоколах пакета сигналу корекції в комп'ютерну мережу 4. Блок прийому сигналу корекції 14 з комп'ютерної мережі 4 приймає пакет сигналу корекції. З пакета сигналу корекції блок прийому сигналу корекції 14 витягує сигнал корекції і передає його на вхід блока формування інтервалу віртуальної синхронізації 15. 6 UA 114817 C2 5 10 15 20 25 30 35 40 45 50 55 Блок формування інтервалу віртуальної синхронізації 15 по сигналу корекції виконує корекцію часового інтервалу віртуальної синхронізації t S шляхом зменшення або збільшення поточного часового інтервалу віртуальної синхронізації на величину часу інтервалу заданої дискретизації t d відповідно до знаку полярності сигналу корекції. Якщо при виконанні корекції блоком формування інтервалу віртуальної синхронізації 15 поточний часовий інтервал віртуальної синхронізації t S зменшився, то блок керування віртуальною синхронізацією 17 протягом одного циклу двічі послідовно посилає запити на другий вхід блока буферизації даних 16. Ці два послідовні запити обумовлюють генерацію двох віртуальних пакетів даних протягом одного циклу, для поточного і скоригованого значень інтервалів віртуальної синхронізації, що, у свою чергу, дозволяє уникнути пропусків в генерації віртуальних пакетів при зменшенні часового інтервалу віртуальної синхронізації t S . Корекція часового інтервалу віртуальної синхронізації t S регулює рівень віртуалізації мережецентричної системи в цілях усунення наслідків порушення синхронізації реальних циклів. Технічний результат досягається за рахунок генерації в мережецентричній системі асинхронного комплексу віртуальних циклів, який дозволяє компенсувати мережеві втрати пакетів даних, підвищити ступінь синхронізації мережецентричних інформаційних потоків при високих рівнях часових затримок, а також усунути конфліктність, властиву характеру формування команд мережецентричного керування. У мережецентричній системі віртуальні цикли генеруються асихронно і тільки в ті моменти часу, коли порушується синхронність реальних швидкісних циклів. Додавання згенерованих віртуальних циклів в мережецентричну систему реальних швидкісних циклів забезпечує в критичних умовах роботи системи досягнення цілей керування, підвищення якості і збільшення стійкості мережецентричного керування швидкісними циклами динамічних прикладних процесів в розподіленому комп'ютерному середовищі в реальному масштабі часу. Було проведено моделювання розподіленого керування швидкісними циклами прикладних процесів в мережецентричній системі. Як керований прикладний процес був вибраний об'єкт, який описувався нелінійними диференціальними рівняннями 17-го порядку з частотою дискретизації даних 50 мс. Моделювалася мережецентрична восьмиканальна система передачі інформаційних потоків пакетів даних про стан об'єкта керування. В процесі моделювання затримка передачі пакетів даних прикладного процесу в кожному каналі змінювалися в циклах випадковим чином в діапазоні 75500 мс. Моделювалася також і втрата пакетів даних в інформаційних потоках, при цьому вірогідність втрати пакетів даних в інформаційних потоках задавалася окремо для кожного з восьми мережевих каналів в діапазоні 1/2501/25. Крім того, моделювався і короткочасний розрив передачі інформаційних потоків пакетів даних по мережі тривалістю 2001200 мс. В процесі моделювання досліджувалася робота двох мережецентричних систем керування швидкісними циклами динамічних прикладних процесів: перша - мережецентрична система керування прикладним процесом була реалізована відповідно до прототипу винаходу, що заявляється (система-прототип); друга - мережецентрична система керування прикладним процесом була реалізована відповідно до винаходу, що заявляється. Робота кожної з двох мережецентричних систем керування прикладним процесом досліджувалася в широкому спектрі початкових умов для виконання трьох завдань керування: стабілізації параметрів прикладного процесу, програмного керування прикладним процесом, термінального керування прикладним процесом. Результати проведених досліджень показали, що якість роботи першої мережецентричної системи керування швидкісними циклами динамічних прикладних процесів (системи-прототипу) значно погіршується вже при вірогідності втрат пакетів даних в інформаційних потоках вище за рівень 1/150. При вірогідності втрат пакетів даних в інформаційних потоках, який перевищує рівень 1/100, система-прототип не досягає цілей керування, також система-прототип втрачає здатність до виконання цільових функцій після короткочасного розриву інформаційного потоку передачі пакетів даних на час, більший ніж 400 мс. Дослідження мережецентричної системи керування прикладним процесом, яка реалізована відповідно до винаходу, що заявляється, показало, що якість роботи цієї системи керування швидкісними циклами динамічних прикладних процесів відповідає необхідній якості в усьому 7 UA 114817 C2 5 10 діапазоні виконаних досліджень при вірогідності втрат пакетів даних до рівня 1/25 в кожному з модельованих каналів передачі інформаційних потоків. Крім того, система, що заявляється, зберігає здатність виконувати цільові функції керування після короткочасного розриву інформаційного потоку передачі пакетів даних на час до 1200 мс. Технічний результат, що досягається, як показали експериментальні дослідження, може бути реалізований тільки взаємозв'язаною сукупністю усіх істотних ознак заявленого винаходу, відображений у формулі винаходу. Усе вищесказане показує, що використання винаходу, що заявляється, дозволяє будувати мережецентричні системи керування, які реалізують інваріантну і безконфліктну синхронізацію інформаційних потоків в розподіленому комп'ютерному середовищі, а також дозволяє значно підвищити якість і стійкість мережецентричного керування конфліктними швидкісними циклами динамічних прикладних процесів в реальному масштабі часу. ФОРМУЛА ВИНАХОДУ 15 20 25 30 35 40 45 50 55 60 1. Спосіб для керування мережецентричною системою конфліктних швидкісних циклів динамічних прикладних процесів, в якому циклічно із заданим періодом дискретизації дані про поточний стан прикладного процесу кодують і формують в пакет даних прикладного процесу, який містить дані про поточний стан прикладного процесу і час формування пакета даних прикладного процесу, пакет даних прикладного процесу передають в комп'ютерну мережу, пакет даних прикладного процесу приймають з комп'ютерної мережі, дані про поточний стан прикладного процесу використовують як початкові умови для моделювання динаміки прикладного процесу, задають часовий інтервал моделювання як сумарний час прогнозованих затримок передачі по мережі пакетів даних прикладного процесу і пакетів команд керування спільно з часом моделювання динаміки прикладного процесу і буферним часом компенсації варіацій затримок передачі пакетів по мережі, для кожного прийнятого пакета даних прикладного процесу в прискореному масштабі часу на часовому інтервалі моделювання моделюють динаміку прикладного процесу спільно з моделюванням процесу формування команд керування, команди керування, які відповідають кінцевій точці часового інтервалу моделювання, розміщують в пакеті команд керування, в якому розміщують також час передачі команд керування в прикладний процес, який визначають як суму часу формування пакета даних прикладного процесу і часового інтервалу моделювання, пакет команд керування передають в комп'ютерну мережу, з комп'ютерної мережі приймають пакети команд керування, прийняті пакети команд керування розміщують в черзі буферизації команд, відповідно із заданим періодом дискретизації, з черги буферизації команд витягують той пакет команд керування, у якому значення часу передачі команд керування в прикладний процес відповідає поточному часу прикладного процесу, декодують пакет команд керування, декодовані команди керування передають в прикладний процес, який відрізняється тим, що виконують часову синхронізацію складових частин пакета даних прикладного процесу, потім, цей пакет даних прикладного процесу без реєстрації розміщують в черзі буферизації даних, незареєстрований пакет даних прикладного процесу з черги буферизації даних використовують для формування початкових умов моделювання динаміки прикладного процесу, після чого пакет даних прикладного процесу реєструють в черзі буферизації даних, спочатку встановлюють часовий інтервал віртуальної синхронізації, що дорівнює сумарній кількості часових інтервалів заданої дискретизації, які без остачі укладаються в прогнозований час затримки передачі пакетів даних прикладного процесу по мережі, кінцеву межу часового інтервалу віртуальної синхронізації на початку кожного циклу суміщають з поточним моментом часу, і тоді початкова межа цього часового інтервалу віртуальної синхронізації задає час віртуальної генерації, перевіряють в черзі буферизації даних наявність зареєстрованого пакета даних прикладного процесу з часом формування, відповідним заданому часу віртуальної генерації, і якщо в черзі буферизації даних такий пакет відсутній, то генерують віртуальний пакет даних, в якому розміщують взятий з черги буферизації даних зареєстрований пакет даних прикладного процесу, час формування якого найближчий до заданого часу віртуальної генерації і до поточного часу, визначають інтервал віртуального розузгодження між часом формування зареєстрованого пакета даних прикладного процесу, що розміщений у віртуальному пакеті даних, і заданим часом віртуальної генерації, дані про стан віртуального процесу, витягнуті з віртуального пакета даних, використовують як початкові умови для моделювання динаміки віртуального процесу, формують віртуальний часовий інтервал моделювання, змінюючи заданий часовий інтервал моделювання на величину інтервалу віртуального розузгодження, для кожного згенерованого віртуального пакета даних в прискореному масштабі часу на віртуальному часовому інтервалі моделювання моделюють 8 UA 114817 C2 5 10 15 20 25 30 35 40 45 50 55 динаміку віртуального процесу спільно з моделюванням процесу формування команд віртуального керування, команди віртуального керування, що відповідають кінцевій точці віртуального часового інтервалу моделювання, розміщують в віртуальному пакеті команд керування, в якому розміщують також час передачі команд керування в прикладний процес, який визначають як суму часу віртуальної генерації і віртуального часового інтервалу моделювання, в віртуальному пакеті команд керування, який формують на основі віртуального пакета даних, додатково розміщують ознаку віртуальності, віртуальний пакет команд керування передають в комп'ютерну мережу, задають часовий інтервал контролю віртуалізації, задають також нижню і верхню межі рівня віртуалізації, періодично, упродовж часового інтервалу контролю віртуалізації, визначають сумарне число віртуальних пакетів команд керування і сумарне число усіх пакетів команд керування, які прийняті в чергу буферизації команд, у кінці інтервалу контролю віртуалізації, по співвідношенню цих двох чисел, визначають поточний рівень віртуалізації, генерують негативний або позитивний сигнал корекції, якщо поточний рівень віртуалізації виходить за нижню або за верхню задані межі рівня віртуалізації відповідно, сигнал корекції кодують і формують в пакет сигналу корекції, пакет сигналу корекції передають в комп'ютерну мережу, приймають з комп'ютерної мережі пакет сигналу корекції, з якого витягують сигнал корекції, згідно з яким виконують корекцію часового інтервалу віртуальної синхронізації шляхом зменшення або збільшення поточного часового інтервалу віртуальної синхронізації на величину часу інтервалу заданої дискретизації відповідно до знаку полярності сигналу корекції, якщо при виконанні корекції поточний часовий інтервал віртуальної синхронізації зменшується, то генерацію віртуального пакета даних протягом одного циклу послідовно виконують двічі відповідно для поточного і скоректованого значень інтервалу віртуальної синхронізації, якщо в черзі буферизації команд розміщені пакети команд керування з однаковим часом передачі команд керування в прикладний процес, то для передачі команд керування в прикладний процес з черги буферизації команд витягують той пакет команд керування, у якому відсутня ознака віртуальності. 2. Пристрій для керування мережецентричною системою конфліктних швидкісних циклів динамічних прикладних процесів, який містить блок датчиків прикладного процесу, вихід якого підключений через блок кодування даних прикладного процесу до входу блока передачі пакетів даних прикладного процесу, вихід якого підключений до входу комп'ютерної мережі, блок прийому пакетів команд керування, який входом підключений до виходу комп'ютерної мережі, а виходом до входу блока буферизації команд, вихід якого з'єднаний через блок декодування з входом блока регуляторів прикладного процесу, вхід блока прийому пакетів даних прикладного процесу підключений до виходу комп'ютерної мережі, вихід блока керування моделюванням з'єднаний з першим входом блока моделювання динаміки прикладного процесу, вихід якого з'єднаний з входом блока команд керування, перший вихід якого підключений до другого входу блока моделювання динаміки прикладного процесу, другий вихід блока команд керування з'єднаний через блок кодування команд керування з входом блока передачі пакетів команд керування, вихід якого підключений до входу комп'ютерної мережі, який відрізняється тим, що в нього введені блок часової синхронізації, блок буферизації даних, блок формування інтервалу віртуальної синхронізації, блок керування віртуальною синхронізацією, блок формування віртуального пакета, блок моделювання динаміки віртуального процесу, блок команд віртуального керування, блок прийому сигналу корекції, блок кодування сигналу корекції, блок передачі пакета сигналу корекції, блок формування сигналу корекції, який входом підключений до другого виходу блока буферизації команд, а виходом до входу блока кодування сигналу корекції, вихід якого підключений через блок передачі пакета сигналу корекції до входу комп'ютерної мережі, вихід блока прийому пакетів даних прикладного процесу через блок часової синхронізації підключений до першого входу блока буферизації даних, перший вихід якого підключений до входу блока керування моделюванням, блок прийому сигналу корекції, який входом підключений до виходу комп'ютерної мережі, а виходом через блок формування інтервалу віртуальної синхронізації до першого входу блока керування віртуальною синхронізацією, перший вихід якого з'єднаний з другим входом блока буферизації даних, другий вихід якого підключений до другого входу блока керування віртуальною синхронізацією, другий вихід якого з'єднаний через блок формування віртуального пакета з першим входом блока моделювання динаміки віртуального процесу, вихід якого з'єднаний з входом блока команд віртуального керування, перший вихід якого підключений до другого входу блока моделювання динаміки віртуального процесу, другий вихід блока команд віртуального керування з'єднаний з другим входом блока кодування команд керування. 9 UA 114817 C2 Комп’ютерна верстка Г. Паяльніков Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G06F 19/00
Мітки: динамічних, мережецентричною, спосіб, швидкісних, прикладних, системою, процесів, конфліктних, керування, пристрій, циклів
Код посилання
<a href="https://ua.patents.su/12-114817-sposib-i-pristrijj-dlya-keruvannya-merezhecentrichnoyu-sistemoyu-konfliktnikh-shvidkisnikh-cikliv-dinamichnikh-prikladnikh-procesiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій для керування мережецентричною системою конфліктних швидкісних циклів динамічних прикладних процесів</a>
Спосіб і пристрій для комп’ютерних мереж керування швидкісними циклами прикладних процесів
Номер патенту: 83118
Опубліковано: 10.06.2008
Автори: Павлов Вадим Володимирович, Павлова Світлана Вадимівна, Богачук Юрій Петрович
МПК: G05B 17/00, H04L 12/66, G05B 15/02
Мітки: спосіб, швидкісними, комп'ютерних, пристрій, керування, процесів, прикладних, циклами, мереж
Формула / Реферат:
1. Спосіб для комп'ютерних мереж керування швидкісними циклами прикладних процесів, в якому циклічно із заданим періодом дискретизації дані про поточний стан прикладного процесу кодують і формують в пакет даних прикладного процесу, який містить дані про поточний стан прикладного процесу і час формування пакета даних прикладного процесу, пакет даних прикладного процесу передають в комп'ютерну мережу, з комп'ютерної мережі приймають і...
Нейромережевий пристрій класифікації динамічних процесів
Номер патенту: 93337
Опубліковано: 25.09.2014
Автори: Заковоротний Олександр Юрійович, Дмитрієнко Валерій Дмитрович
МПК: G06G 7/00
Мітки: пристрій, класифікації, динамічних, нейромережевий, процесів
Формула / Реферат:
Нейромережевий пристрій класифікації динамічних процесів, створений на основі безперервних нейронних мереж адаптивної резонансної теорії, що складається з сенсорного шару нейронів, який відрізняється тим, що в його склад введено шар спільних розпізнавальних нейронів, елементи якого зв'язані однонаправленими вхідними зв'язками з відповідними їм елементами розпізнавальних шарів нейронів двох модулів та спільним вирішуючим нейроном пристрою...
Нейромережевий пристрій для розпізнавання та класифікації динамічних процесів
Номер патенту: 74414
Опубліковано: 25.10.2012
Автори: Дмитрієнко Валерій Дмитрійович, Заковоротний Олександр Юрійович
МПК: G06G 7/60
Мітки: процесів, пристрій, класифікації, розпізнавання, динамічних, нейромережевий
Формула / Реферат:
Нейромережевий пристрій для розпізнавання та класифікації динамічних процесів, створений на основі безперервних нейронних мереж адаптивної резонансної теорії складається з сенсорного шару нейронів, який відрізняється тим, що до його складу введено шар інтерфейсних елементів, нейрони якого зв'язані вхідними зв'язками з нормуючим нейроном, вихідними зв'язками з керуючим нейроном та зваженими двонаправленими зв'язками з кожним нейроном...
Пристрій дистанційного керування

Номер патенту: 43054
Опубліковано: 27.07.2009
Автор: Кондратьєв Дмитро Володимирович
МПК: H04N 5/44
Мітки: керування, пристрій, дистанційного
Формула / Реферат:
1. Пристрій дистанційного керування, що містить пульт керування, вихід якого є входом каналу зв'язку, приймач команд, вхід якого є виходом каналу зв'язку, декодер команд, який відрізняється тим, що в пульті дистанційного керування додатково встановлений приймач радіосигналу та демодулятор, а також дешифратор команд та пристрій керування індикацією, а в приймачі команд додатково встановлені шифратор, модулятор та передавач...
Нейромережевий пристрій класифікації динамічних процесів з можливістю блокування частини вхідного зображення
Номер патенту: 93317
Опубліковано: 25.09.2014
Автори: Дмитрієнко Валерій Дмитрович, Заковоротний Олександр Юрійович
МПК: G06G 7/00
Мітки: процесів, частини, пристрій, нейромережевий, класифікації, вхідного, можливістю, динамічних, блокування, зображення
Формула / Реферат:
Нейромережевий пристрій класифікації динамічних процесів з можливістю блокування частини вхідного зображення, створений на основі безперервних нейронних мереж адаптивної резонансної теорії, що складається з сенсорного шару нейронів, який відрізняється тим, що в його склад введено шар блокуючих нейронів, які, з одного боку, послідовно пов'язані між собою парами двонаправлених зв'язків, а з іншого боку, кожен з нейронів блокуючого шару...