Нейромережевий пристрій класифікації динамічних процесів з можливістю блокування частини вхідного зображення
Номер патенту: 93317
Опубліковано: 25.09.2014
Автори: Дмитрієнко Валерій Дмитрович, Заковоротний Олександр Юрійович
Формула / Реферат
Нейромережевий пристрій класифікації динамічних процесів з можливістю блокування частини вхідного зображення, створений на основі безперервних нейронних мереж адаптивної резонансної теорії, що складається з сенсорного шару нейронів, який відрізняється тим, що в його склад введено шар блокуючих нейронів, які, з одного боку, послідовно пов'язані між собою парами двонаправлених зв'язків, а з іншого боку, кожен з нейронів блокуючого шару елементів з'єднуються вихідними зв'язками з усіма нейронами сенсорного шару та вхідними зв'язками усіма нейронами спільного розпізнавального шару, елементи якого зв'язані однонаправленими вхідними зв'язками з відповідними їм елементами розпізнавальних шарів нейронів двох модулів, та спільним вирішуючим нейроном пристрою класифікації динамічних процесів, два паралельно працюючих модуля являють собою модифіковані безперервні нейроні мережі адаптивної резонансної теорії, кожен з яких включає в себе шар інтерфейсних елементів, нейрони якого зв'язані вхідними однонаправленими зв'язками з відповідним їм елементами сенсорного шару нейронів пристрою класифікації динамічних процесів та нормуючим нейроном модуля, який у свою чергу зв'язаний вхідними зв'язками з кожним елементом сенсорного шару нейронів, та вихідними зв'язками з кожним з елементів у інтерфейсному шарі нейронів й шар розпізнавальних елементів, нейрони якого зв'язані бінарними однонаправленими вихідними зв'язками з відповідними їм розпізнавальними нейронами другого модуля пристрою, парами двонаправлених зважених зв'язків з безперервними ваговими коефіцієнтами з кожним із елементів інтерфейсного шару модуля, та бінарними однонаправленими вихідними зв'язками з відповідними їм спільними розпізнавальними нейронам пристрою класифікації динамічних процесів й вирішаючий нейрон модуля, який пов'язаний збуджуючими бінарними вихідними однонаправленими зв'язками з усіма елементами розпізнавального шару модуля нейронної мережі та спільними вирішуючим нейроном пристрою класифікації динамічних процесів, та гальмуючими бінарними вхідними однонаправленими зв'язками з усіма елементами інтерфейсного шару нейронів модуля та спільний вирішуючий нейрон пристрою класифікації динамічних процесів, який в свою чергу, зв'язаний бінарними однонаправленими вихідними зв'язками з всіма елементами спільного розпізнавального шару нейронів пристрою класифікації динамічних процесів та бінарними однонаправленими вхідними зв'язками з вирішуючими нейронами кожного модуля пристрою класифікації динамічних процесів.
Текст
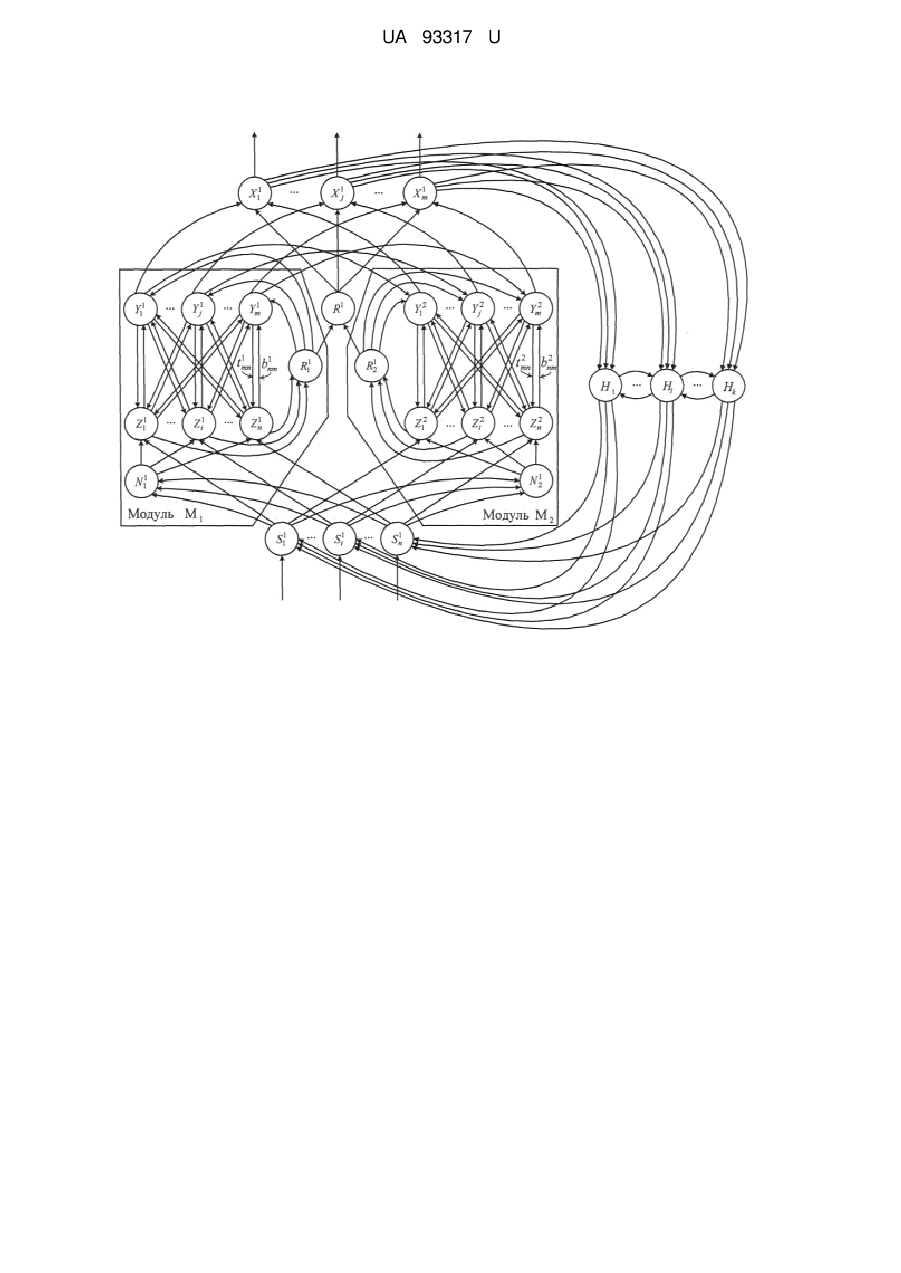
Реферат: UA 93317 U UA 93317 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до обчислювальної техніки, зокрема до області побудови інтелектуальних автоматизованих систем керування, а саме до напрямку створення систем діагностики складних технічних об'єктів у процесі їхньої експлуатації. Корисна модель може бути використана при побудові системи керування або діагностики такого складного технічного об'єкта як дизель-поїзд з тяговими асинхронними електроприводами. Відомий пристрій обробки цифрової інформації містить координатний комутатор, блок буферної пам'яті скалярних команд, блок буферної пам'яті даних, скалярні операційні блоки, векторні регістри, блок буферної пам'яті векторних команд, векторні операційні блоки, паралельні шини пам'яті, блоки оперативної пам'яті, шини вводу / виводу, блоки введення / виведення даних, блоки пам'яті готовності даних, логічні схеми готовності даних, регістр зайнятості, логічну схему зайнятості, інформаційну шину, ланцюговий інтерфейс, блок буферної пам'яті функціональних параметрів, магазинну пам'ять [1]. Недоліками відомого пристрою обробки цифрової інформації є те, що в ньому відсутня можливість виділення нових образів від перекручених або зашумлених відомих образів, крім того відомий пристрій накладає обмеження на послідовність пред'явлення навчальних вибірок. Відомий пристрій гармонічний перцептрон, що містить три шари, причому другий шар нейроподібних елементів є гармонічними нейрон елементами, які містять групи синоптичних каналів синусоїдних функцій, суматори, лінії вхідної амплітудно-часової функції і сигналу збудження пристрою, вхід кожного з яких зв'язаний тільки з одним виходом сенсорного нейроелемента першого шару, виходи третього шару відображають класи належності вхідних сигналів, який відрізняється тим, що третій шар являє собою блок класифікації, який містить m лічильників, де m - кількість класів, m елементів І першої групи, m елементів І другої групи, m елементів НІ групи, елементи І, АБО, НІ, m RS-тригерів, при цьому входи віднімання лічильників з'єднані відповідно з виходами елементів І першої групи, перший вхід елемента І з'єднаний з входом синхронізації пристрою, а його другий вхід підключений до виходу елемента АБО і до других входів елементів І другої групи, виходи яких з'єднані відповідно з R-входами RS-тригерів, вихід елемента І з'єднаний з першими входами елементів І першої групи, а виходи елементів НІ групи з'єднані з першими входами елементів І другої групи відповідно, інформаційні входи лічильників з'єднані відповідно з входами блока класифікації, інверсні виходи ознаки нуля лічильників підключені відповідно до других входів елементів І першої групи, входів елементів НІ групи, а також з'єднані з відповідними входами елемента АБО, вхід елемента НІ з'єднаний з виходом елемента АБО, а його вихід є виходом сигналу "Кінець" пристрою, вхід установлення в початковий стан пристрою з'єднаний з входами скиду лічильників, а також з S-входами RSтригерів, прямі виходи яких є виходами блока класифікації пристрою [2]. При порівнянні з першим аналогом, пристрій гармонічний перцептрон має можливість виділення нових образів, та не накладає обмежень на послідовність пред'явлення вхідних навчальних зображень. Однак у розглянутого аналога відсутня можливість запам'ятовування й відновлення з пам'яті пристрою зображень, які представлені у вигляді векторів з безперервними складовими. Крім цього у розглянутого пристрою відсутня можливість донавчання у процесі свого функціонування. Це пов'язано, в першу чергу, з тим, що запам'ятовування нових зображень, вимагає процесу повного перенавчання всіх вагових коефіцієнтів даного пристрою. Найбільш близьким до заявленого пристрою є безперервна нейронна мережа АРТ-2, що містить шар сенсорних елементів, нейрони якого зв'язані парами двонаправлених зв'язків з відповідними їм нейронами інтерфейсного шару, елементи якого зв'язані бінарними односпрямованими вхідними зв'язками з першим нормалізуючим модулем і відповідними їм нейронами першого обробного шару, елементи якого, у свою чергу, зв'язані бінарними односпрямованими вхідними зв'язками з першим нормалізуючим модулем та бінарними односпрямованими вихідними зв'язками з відповідними їм нейронами другого обробного шару, які, у свою чергу, зв'язані бінарними односпрямованими вихідними зв'язками з другим нормалізуючим модулем і відповідними їм нейронами четвертого обробного шару, елементи якого зв'язані бінарними односпрямованими вихідними зв'язками з відповідними їм нейронами інтерфейсного та керуючого шарів, а також бінарними односпрямованими вхідними зв'язками з другим нормалізуючим модулем, і парами двоспрямованих зважених зв'язків з безперервними ваговими коефіцієнтами з нейронами проміжного шару, при цьому, кожний з нейронів керуючого шару зв'язаний бінарними односпрямованими вихідними зв'язками з керуючим нейроном, що, у свою чергу, зв'язаний бінарними односпрямованими вихідними зв'язками з кожним з нейронів розпізнавального шару, елементи якого зв'язані двоспрямованими зваженими зв'язками з безперервними ваговими коефіцієнтами з кожним з нейронів проміжного шару, відповідні елементи якого зв'язані бінарними односпрямованими вихідними зв'язками з відповідними їм 1 UA 93317 U 5 10 15 20 25 30 35 40 45 50 55 нейронами керуючого шару елементів, третім нормалізуючим модулем, а також з відповідними їм нейронами третього обробного шару, елементи якого зв'язані бінарними односпрямованими вхідними зв'язками з третім нормалізуючим модулем, а також бінарними вихідними односпрямованими зв'язками з відповідними їм нейронами другого обробного шару [3]. При порівнянні з відомими аналогами пристрій-прототип (безперервна нейрона мережа АРТ-2) має можливість донавчання в процесі свого функціонування та здатна відокремлювати нові образи від перекручених або зашумленних відомих образів, а також має можливість запам'ятовування у своїй пам'яті зображення, представлених у вигляді векторів з бінарними складовими. Однак нормування компонент вхідного вектора, яке зложене у шарах безперервної нейронної мережі відносить зображення однакові за формою але різних за амплітудою відносяться до одного типу зображень. Крім цього пристрій-прототип не в змозі зберігати у своїй пам'яті класи зображень. Таким чином, недоліком прототипу є те, що він не в змозі зберігати у своїй пам'яті класи зображень та відносити до різних зображень процеси однакові за формою, але різні за амплітудою. В основу корисної моделі поставлено задачу розробки нейромережевого пристрою класифікації динамічних процесів, який не накладає обмеження на послідовність пред'явлення навчальних зображень, має можливість запам'ятовувати й відновляти з пам'яті пристрою класи зображень які представлені у вигляді векторів з безперервними складовими, відносить зображення однакові за формою але різні за амплітудою до різних класів зображень, та має можливість донавчатися в процесі свого функціонування. Поставлена задача вирішується завдяки тому, що пристрій класифікації динамічних процесів, створений на основі безперервних нейронних мереж адаптивної резонансної теорії, перебудовується шляхом введення в його структуру, шару блокуючих нейронів, які, з одного боку, послідовно пов'язані між собою парами двонаправлених зв'язків, а з іншого боку, кожен з нейронів блокуючого шару елементів з'єднуються вихідними зв'язками з усіма нейронами сенсорного шару та вхідними зв'язками усіма нейронами спільного розпізнавального шару, елементи якого зв'язані однонаправленими вхідними зв'язками з відповідними їм елементами розпізнавальних шарів нейронів двох модулів, та спільним вирішуючим нейроном пристрою класифікації динамічних процесів, два паралельно працюючих модуля представляють собою модифіковані безперервні нейроні мережі адаптивної резонансної теорії, кожен з яких включає в себе шар інтерфейсних елементів, нейрони якого зв'язані вхідними однонаправленими зв'язками з відповідним їм елементами сенсорного шару нейронів пристрою класифікації динамічних процесів та нормуючим нейроном модуля, який у свою чергу зв'язаний вхідними зв'язками з кожним елементом сенсорного шару нейронів, та вихідними зв'язками з кожним з елементів у інтерфейсному шарі нейронів й шар розпізнавальних елементів, нейрони якого зв'язані бінарними однонаправленими вихідними зв'язками з відповідними їм розпізнавальними нейронами другого модуля пристрою, парами двонаправлених зважених зв'язків з безперервними ваговими коефіцієнтами з кожним із елементів інтерфейсного шару модуля, та бінарними однонаправленими вихідними зв'язками з відповідними їм спільними розпізнавальними нейронам пристрою класифікації динамічних процесів й вирішаючий нейрон модуля, який пов'язаний збуджуючими бінарними вихідними однонаправленими зв'язками з усіма елементами розпізнавального шару модуля нейронної мережі та спільними вирішуючим нейроном пристрою класифікації динамічних процесів, та гальмуючими бінарними вхідними однонаправленими зв'язками з усіма елементами інтерфейсного шару нейронів модуля та спільний вирішуючий нейрон пристрою класифікації динамічних процесів, який в свою чергу, зв'язаний бінарними однонаправленими вихідними зв'язками з всіма елементами спільного розпізнавального шару нейронів пристрою класифікації динамічних процесів та бінарними однонаправленими вхідними зв'язками з вирішуючими нейронами кожного модуля пристрою класифікації динамічних процесів. Корисна модель ілюструється кресленням, на якому наведена архітектура нейромережевого пристрою класифікації динамічних процесів з можливістю блокування частини вхідного зображення. Корисна модель представляє собою нейронну мережу, до складу якої входить сенсорний шар елементів S 1 i 1 ..., n , який приймає вектор вхідного зображення. Елементи сенсорного , i S-шару передає вхідні зображення інтерфейсним нейронам Z 1 , Z i2 i модулів M1 та M2 нейронної мережі. Елементи інтерфейсних шарів Z 1 , i з елементами розпізнавальних шарів Yj1 , Yj2 i 1,..., n , відповідно Z i2 i 1 ..., n пов'язані , j 1,..., m , відповідно модулів 2 M1 , M2 нейронної UA 93317 U мережі. З'єднання між елементами інтерфейсних та розпізнавальних шарів, здійснюється 2 зваженими зв'язками з ваговими коефіцієнтами b1 , bij ij 5 i 1,..., n; j 1,..., m , відповідно для шари Yj1 , Yj2 j 1 ..., m , є шарами , модулів M1 , M2 , нейронної мережі. У модулях M1 , M2 нейронів, що змагаються, у яких кожний елемент може перебувати в одному із трьох станів: активному, неактивному, загальмованому. У результаті розпізнавання вхідних зображень у кожному модулі нейронної мережі залишається активним тільки один нейрон розпізнавального 2 1 шару YJ , YJ у відповідним їм шарах Yj1 , Yj2 j 1,..., m модулів M1 , M2 нейронної мережі. За допомогою вирішальних нейронів R1 , R2 визначаються параметри подібності p1 , p 2 , відповідно для модулів M1 , M2 нейронної мережі, а за допомогою нейрону R1 , який входить до 10 15 пристрою, визначається загальний параметр подібностей p 1 . Якщо вхідне зображення знаходиться на кордоні двох сусідніх класів зображень, то відбувається зниження параметра подібності для обох сусідніх класів зображень, в результаті чого вхідне зображення не може бути однозначно віднесена ні до одного з відомих мережі класів зображень. Для усунення цього недоліку нейрони H-шару Hl l 1 ..., k можуть блокувати частину нейронів сенсорного шару , елементів. Пристрій класифікації динамічних процесів з можливістю блокування частини вхідного зображення, побудована на нейронних мережах адаптивної резонансної теорії, орієнтована на 20 2 роботу з безперервними вхідними зображеннями, тому всі ваги зв'язків b1 , bij , t1 , t 2 , ji ji ij модулів M1 , M2 нейронної мережі, є безперервними. i 1,..., n; j 1,..., m Процес навчання нової нейронної мережі вважається закінченим, коли по закінченню 25 2 чергової епохи навчання відсутні зміни вагових коефіцієнтів: b1 , bij i 1 ..., n; j 1 ..., m і t1 , t 2 , , ji ji ij j 1,..., m; i 1,..., n , відповідно ваг зв'язків від елементів інтерфейсного шару до елементів розпізнавального шару, і ваг зв'язків від елементів розпізнавального шару, до елементів інтерфейсного шару нейронної мережі. В режимі розпізнавання вхідних зображень n-мірні вхідні вектора можуть подаватися на вхід S 1 i 1 ..., n елементів нейронної мережі. Нейрон-переможець X1 активізується сигналами від , J i пари нейронів розпізнавальних шарів, відповідно модулів M1 , M2 . Нейрон-переможець X1 , J 2 1 визначається сигналами нейронів-переможців YJ й YJ j 1,..., m , 30 розпізнавальних шарів Yj1 , Yj2 1 відповідно модулів M1 , M2 . Нейрон-переможець YJ , вибирається в результаті змагання нейронів розпізнавальних шарів Yj1 j 1 ..., m , модуля M1 нейронної мережі. Нейрон, 2 переможець YJ модуля M2 , вибирається не в результаті змагання нейронів розпізнавальних шарів Yj2 j 1,..., m , модуля 1 M2 , а сигналами з відповідного YJ нейрона-переможця модуля M1 , після його перевірки за величиною параметру p1 подібності. У зв'язку із цим введені зв'язки між парами Y-нейронів Yj1 , Yj2 35 j 1,..., m нейронної мережі. Виділені в такий спосіб нейрони 2 2 YJ модуля M2 , також перевіряються по величині параметрів подібності p 2 . Якщо нейрони YJ витримують цю перевірку та витримують наступну перевірку за величиною параметра 2 1 подібності й пари нейронів YJ , YJ , нейронної мережі, то на виході нейрона X1 , з'являється J 2 одиничний сигнал, що свідчить про розпізнавання вхідного зображення. Якщо нейрони YJ або 2 1 пара елементів YJ , YJ нейронної мережі, не витримують перевірку за величиною параметрів 40 2 1 подібності, то нейрон YJ , модуля M1 , загальмовується Uв ихY1 1 , а нейрон YJ , модуля M2 , J переводяться в неактивний стан Uв ихY2 0 . 45 J Нейрони H-шару мають структуру ланцюга й призначені для блокування вхідних нейронів сенсорного шару за наступним алгоритмом: у разі, коли вхідне зображення не резонує з жодним 1 з відомих зображень, тобто в X -шарі всі нейрони загальмовані, активізується перший нейрон Hшару, який блокує частину поля вхідних нейронів сенсорного шару, які, в свою чергу, містять 3 UA 93317 U 5 10 15 інформацію про початкову ділянку процесів, що ідентифікуються. Якщо й після блокування першої частини сенсорних нейронів розпізнати вхідне зображення не вдається, то активізується наступний нейрон H-шару й блокується додаткова частина сенсорних нейронів. Цикл активізації блокуючих нейронів H-шару продовжується до тих пір, поки або не з'явиться активний нейрон у 1 X -шарі, тобто динамічний процес буде розпізнано, або буде заблокована максимально допустима частина нейронів сенсорного шару елементів. Блокування частини поля нейронів сенсорного шару дає можливість не використовувати початкові точки перехідного процесу, тобто усувається негативний вплив накопиченої передісторії, коли спостерігалися коливання між класами процесів, а розпізнавання динамічного режиму проводиться тільки за значенням нейронів сенсорного шару, що залишилися не загальмованими. Нейромережевий пристрій класифікації динамічних процесів, на основі нейронних мереж адаптивної резонансної теорії, функціонує відповідно до двох алгоритмів: навчання й розпізнавання. В алгоритмах прийняті наступні позначення: m - максимальне число пар асоціативних зображень, що запам'ятовують; n й k - число компонентів у вхідному векторі (зображенні) відповідно для модуля M1 й M2 ; p 1 - параметр подібності; q - число пар асоціативних зображень, що запам'ятовують; p1 , p 2 - параметри подібності між вхідним вектором і векторами, що зберігаються у вагах 20 2 1 зв'язків перемігших нейронів, відповідно YJ , YJ модулів M1 , M2 нейронної мережі; діапазон припустимих значень параметрів подібності: 0 p1 , p2 1 ; 2 , , b1 , bij i 1 ..., n; j 1 ..., m - ваги зв'язків від елементів інтерфейсного шару до елементів ij розпізнавального шару, відповідно модулів M1 , M2 ; початкове значення, що рекомендує, при 2 навчанні b1 bij 1 i 1 ..., n; j 1 ..., m ; , , ij 25 , , t1 , t 2 j 1 ..., m; i 1 ..., n - ваги зв'язків від елементів розпізнавального шару, до елементів ji ji інтерфейсного шару, відповідно модулів M1 , M2 ; початкове значення, що рекомендує, при навчанні t1 t 2 1 j 1 ..., m; i 1 ..., n ; , , ji ji Uв ихS1 i 1 ..., n; l 1 ..., k - вихідний сигнал елементів S-шару нейронної мережі; , , i 30 Uв х.Z p , Uв их.Z p p 1 2; i 1 ..., n - вхідні й вихідні сигнали елементів інтерфейсного шару, , , i i відповідно модулів M1 , M2 нейронної мережі; j 1,..., m - вихідні сигнали розпізнавальних елементів, відповідно модулів U 1 , U 2 в их.Y j в их.Yj M1 , M2 нейронної мережі; Uв их.X1 j 1 ..., m - вихідний сигнал розпізнавальних елементів нейронної мережі; , j S u1 S1, ..., S1 - бінарні вхідні вектора; 1 n Y - норма вектора Y ; 35 , , , I lw minti , I lw maxti l 1 ..., L; w 1 ..., K; ti 0,1 2,... - відповідно мінімальне й максимальне значення змінної Iw ti в l-м l 1 ..., L; режимі функціонування об'єкта у множині , I 40 45 ,I lw2ti ,..., I lwM ti , навчальних процесів у моменти часу l w1 t i l ti . K - число процесів у розпізнаваному динамічному режимі; Алгоритм навчання нейромережевого пристрою класифікації динамічних процесів на основі безперервних нейронних мереж адаптивної резонансної теорії, припускає виконання наступних кроків: Крок 1. Ініціюються параметри подібності й всі ваги зв'язків асоціативної нейронної мережі. Крок 2. Задаються нульові вихідні сигнали всіх розпізнавальних елементів модулів M1 , M2 нейронної мережі: U , , p 0 ; U 1 0 ; p 1 2 . j 1 ..., m . в их.Y j в их.X j 4 UA 93317 U Крок 3. Для кожного навчальної множини Mu l 1 ..., L вхідних зображень, що ставляться , l до одного режиму функціонування об'єкта, виконуються кроки 4-17. Крок 4. Для кожного вхідного зображення, що ставиться до одного режиму функціонування 5 об'єкта, визначається безліч верхніх I r maxti й нижніх I r minti огинаючих для кожного з K w w процесів. , , I lw max max I lw1t i ,I lw 2ti ,..., I lwM t i , l 1 ..., L ; w 1 ..., K ; l t i 0,1 2,..., T n 1, , , , I lqmin min I lq1ti ,I lq2ti ,..., I lqM t i , l 1 ..., L ; q 1 ..., K ; l t i 0,1 2,..., T n 1. , 10 Отриманими огинаючими активізуються нейрони сенсорного шару елементів S 1 i 1 ..., n : , i , Uв их.S1 Su1 ; i 1 ..., n ; ri ri Крок 5. Для кожної із огинаючих виконуються кроки алгоритму 6-17. Крок 6. Формуються вхідні сигнали елементів інтерфейсних шарів Z 1 , Z i2 i 1 ..., n модулів , i , M2 нейронної мережі. M1 15 Крок 7. Формуються вихідні сигнали елементів інтерфейсних шарів Z 1 , Z i2 i модулів M1 , M2 нейронної мережі: i 1,..., n Uв их.Z p Uв х.Z p ; p 1 2 ; i 1 ..., k . , , i i Крок 8. Для всіх незагальмованих розпізнавальних Y-нейронів, модулів M1 , M2 нейронної мережі, розраховуються їхні вихідні сигнали: n 20 Uв их.Y k bkUв их.Z k , якщо Uв их.Y k 1 , k 1 2 ; j 1 ..., m ; , , ij j i i 1 j Крок 9. Поки не знайдені нейрони-переможці розпізнавальних шарів Y1 , Yj2 j j 1,..., m , відповідно модулів M1 , M2 , вагові векторі які відповідно до заданих значень параметрів подібності p1 , p 2 відповідають верхнім й нижнім огинаючим вхідного вектора S1 , виконуються r кроки 10-17. 25 2 1 Крок 10. В Y-шарах модулів M1 , M2 визначаються нейрони відповідно YJ , YJ , що задовольняють умовам: Uв их.Y k Uв их.Y k , k 1 2 ; j 1 ..., m ; , , J 30 j 2 1 Якщо елементів YJ , YJ у Y-шарах модулів M1 , M2 є декілька, то вибираються елементи з найменшими індексами. Якщо знайдений нейрон-переможець є загальмованим, то вхідне зображення для даного модуля не може бути запам'ятовано. 2 1 Крок 11. Вихідним сигналам нейронів-переможців YJ , YJ , привласнюються одиничні значення: U 1 U 2 1 , а всі інші незагальмовані нейрони розпізнавальних шарів в их.YJ в их.YJ модулів M1 , M2 переводяться в неактивний стан: Uв их.Y 1 Uв их.Y 2 0 , j 1 ..., m , j J . , j 35 j Крок 12. Розраховуються вихідні сигнали елементів інтерфейсних шарів Z 1 , Z i2 i відповідно модулів M1 , M2 нейронної мережі: i 1,..., n , Uв их.Z1 Uв их.Y1 t1 , Uв их.Z 2 Uв их.Y 2 t 2 , i 1 ..., n ; Ji Ji i i j j Крок 13. Визначаються параметри подібності p 1 , p1 , відповідно для модулів M1 , M2 1 2 нейронної мережі: 40 p1 1 l P1k, t i K T 1 , p1 2 l P2 k, t i KT 1 , 5 UA 93317 U l l де P1k, t i й P2 k, t i - функції, що відповідають l-му динамічному режиму, розпізнавальному по відповідно до максимальним I lk max t i й мінімальним I lk mint i значенням; l 1 если I l , , , w max t i I w t i , w 1 ..., K, t i 0, 1 ..., T n 1 , l P1w, t i , , 0, если I lw max t i I lw t i , w 1, ..., K, t i 0,1 ..., T n 1 l P2 5 l 1 если I l , , , w mint i I w t i , w 1 ..., K, t i 0,1 ..., T n 1 , w, t i , , 0, если I lw mint i I lw t i , w 1 ..., K, t i 0,1, ..., T n 1 l l l l P1k, t i й P2 k, t i - норми функцій P1k, t i і P2 k, t i , які обчислюються співвідношеннями: l P1k, t i K T l P1k, t i , k 1t i 0 l P2 k, t i K T l P2 k, t i , k 1t i 0 де K - число процесів у розпізнаваних режимах функціонування об'єкта. Крок 14. Перевіряється по обчислених параметрах подібності p1 , p 2 правильність вибору нейронів-переможців 10 1 YJ , 2 YJ . Якщо p1 p1 , то умова не виконується, елемент 1 YJ загальмовується: U ; здійснюється перехід до кроку 10 алгоритму. Якщо p1 p1 , то в их.Y 1 1 J 1 умова, що підтверджує правильність вибору нейрона-переможця YJ виконується й здійснюється перехід до наступного кроку алгоритму. Аналогічним образам проводиться 2 перевірка правильності вибору нейронів-переможців YJ , у відповідним їм шарах Yj2 , j 1 ..., m , 15 модуля M2 нейронної мережі. Крок 15. Проводиться перевірка правильності вибору нейронів-переможців по загальних параметрах подібності p1 нейронної мережі. Якщо p1 p1 p 2 1 , то підтверджується 2 1 правильність вибору нейронів-переможців YJ , YJ відповідно для модулів M1 , M2 нейронної мережі та здійснюється перехід до наступного кроку алгоритму. Якщо умова не виконується, то здійснюється перехід до крок 10 алгоритму. 20 2 1 Крок 16. Адаптуються ваги зв'язків елементів YJ , YJ відповідно для модулів M1 , M2 нейронної мережі: 2 , b1 Uв х.Z1 , t1 Uв х.Z1 , biJ Uв х.Z 2 , t 2 Uв х.Z 2 , i 1 ..., n ; iJ Ji Ji i i Крок 17. Пари 25 30 i нейронів-переможців i 1 YJ , 2 YJ активізують відповідні їм елементи розпізнавального шару X1 . j Крок 18. Останов. Алгоритм роботи, нейромережевого пристрою класифікації динамічних процесів побудованої на основі безперервних нейронних мереж адаптивної резонансної теорії, припускає виконання наступних кроків: Крок 1. Ініціюються параметри подібності й всі ваги зв'язків асоціативної нейронної мережі. Крок 2. Задаються нульові вихідні сигнали всіх розпізнавальних елементів модулів M1 , нейронної мережі: M2 Uв их.Y p 0 ; Uв их.X 1 0 ; p 1 2 . j 1 ..., m . , , j j 35 Крок 3. Для кожного навчальної множини Mu l 1 ..., L вхідних зображень, що ставляться , l до одного режиму функціонування об'єкта, виконуються кроки 4-16. Крок 4. Для кожного вхідного зображення, що ставиться до одного режиму функціонування об'єкта, визначається безліч верхніх I r maxti й нижніх I r minti огинаючих для кожного з K w w процесів. , , I lw max max I lw1t i ,I lw 2ti ,..., I lwM t i , l 1 ..., L ; w 1 ..., K ; l t i 0,1 2,..., T n 1, , 6 UA 93317 U , , I lqmin min I lq1ti ,I lq2ti ,..., I lqM t i , l 1 ..., L ; q 1 ..., K ; l t i 0,1 2,..., T n 1. , Отриманими огинаючими активізуються нейрони сенсорного шару елементів S 1 i 1 ..., n : , i , Uв их.S1 Su1 ; i 1 ..., n ; ri ri 5 Крок 5. Для кожної із огинаючих виконуються кроки алгоритму 6-16. Крок 6. Формуються вхідні сигнали елементів інтерфейсних шарів Z 1 , Z i2 i 1 ..., n модулів , i M1 , M2 нейронної мережі. Крок 7. Формуються вихідні сигнали елементів інтерфейсних шарів Z 1 , Z i2 i модулів M1 , M2 нейронної мережі: 10 i 1,..., n Uв их.Z p Uв х.Z p ; p 1 2 ; i 1 ..., k . , , i i Крок 8. Для всіх незагальмованих розпізнавальних Y-нейронів, модулів M1 , M2 нейронної мережі, розраховуються їхні вихідні сигнали: n Uв их.Y k bkUв их.Z k , якщо Uв их.Y k 1 , k 1 2 ; j 1 ..., m ; , , ij j i i 1 j Крок 9. Поки не знайдені нейрони-переможці розпізнавальних шарів Y1 , Yj2 j 15 j 1,..., m , відповідно модулів M1 , M2 , вагові векторі, які відповідно до заданих значень параметрів подібності p1 , p 2 відповідають верхнім й нижнім огинаючим вхідного вектора S1 , виконуються r кроки 10-16. 20 2 1 Крок 10. В Y-шарах модулів M1 , M2 визначаються нейрони відповідно YJ , YJ , що задовольняють умовам: Uв их.Y k Uв их.Y k , k 1 2 ; j 1 ..., m ; , , J j 2 1 Якщо елементів YJ , YJ у Y-шарах модулів M1 , M2 є декілька, то вибираються елементи з найменшими індексами. Якщо знайдений нейрон-переможець є загальмованим, то вхідне зображення для даного модуля не може бути запам'ятовано. 25 2 1 Крок 11. Вихідним сигналам нейронів-переможців переможців YJ , YJ , привласнюються одиничні значення: U 1 U 2 1 , а всі інші незагальмовані нейрони розпізнавальних в их.YJ в их.YJ шарів модулів M1 , M2 переводяться в неактивний стан: Uв их.Y 1 Uв их.Y 2 0 , j 1 ..., m , j J . , j j Крок 12. Розраховуються вихідні сигнали елементів інтерфейсних шарів Z 1 , Z i2 i відповідно модулів M1 , M2 нейронної мережі: 30 i 1,..., n , Uв их.Z1 Uв их.Y1 t1 , Uв их.Z 2 Uв их.Y 2 t 2 , i 1 ..., n ; Ji Ji i j i j Крок 13. Визначаються параметри подібності p 1 , p1 , відповідно для модулів M1 , M2 1 2 нейронної мережі: p1 1 l P1k, t i K T 1 , p1 2 l P2 k, t i KT 1 , l l де P1k, t i й P2 k, t i - функції, що відповідають l-му динамічному режиму, розпізнавальному 35 по відповідно до максимальним I lk max t i й мінімальним I lk mint i значенням; l 1 если I l , , , w max t i I w t i , w 1 ..., K, t i 0, 1 ..., T n 1 , l P1w, t i , , 0, если I lw max t i I lw t i , w 1, ..., K, t i 0,1 ..., T n 1 l 1 если I l , , , w mint i I w t i , w 1 ..., K, t i 0,1 ..., T n 1 , l P2 w, t i , , 0, если I lw mint i I lw t i , w 1 ..., K, t i 0,1, ..., T n 1 7 UA 93317 U l l l l P1k, t i й P2 k, t i - норми функцій P1k, t i і P2 k, t i , які обчислюються співвідношеннями: l P1k, t i K T l P1k, t i , k 1t i 0 l P2 k, t i K T l P2 k, t i , k 1t i 0 де K - - число процесів у розпізнаваних режимах функціонування об'єкта. Крок 14. Перевіряється по обчислених параметрах подібності p1 , p 2 правильність вибору 5 нейронів-переможців 1 YJ , 2 YJ . Якщо p1 p1 , то умова не виконується, елемент 1 YJ загальмовується: U ; здійснюється перехід до кроку 10 алгоритму. Якщо p1 p1 , то в их.Y 1 1 J 1 умова, що підтверджує правильність вибору нейрона-переможця YJ виконується й здійснюється перехід до наступного кроку алгоритму. Аналогічним образам проводиться 2 перевірка правильності вибору нейронів-переможців YJ , у відповідним їм шарах Yj2 , j 1 ..., m , 10 модуля M2 нейронної мережі. Крок 15. Проводиться перевірка правильності вибору нейронів-переможців по загальних параметрах подібності 15 20 30 35 нейронної мережі. Якщо p1 p1 p 2 1 , то підтверджується 2 1 правильність вибору нейронів-переможців YJ , YJ відповідно для модулів M1 , M2 нейронної мережі та здійснюється перехід до наступного кроку алгоритму. Якщо умова не виконується, то здійснюється перехід до крок 10 алгоритму. Якщо в Х-шарі всі нейрони загальмовані, то активізується перший нейрон H-шару, який блокує частину вхідних нейронів сенсорного шару, які містять інформацію про початковому ділянці ідентифікованих процесів. Якщо й після блокування першої частини вхідних нейронів сенсорного шару розпізнати вхідне зображення не вдається, то активізується наступний нейрон H-шару й блокується додаткова частина вхідних нейронів сенсорного шару. Цикл активізації додаткових керівних нейронів H-шару продовжується до тих пір, поки або не з'явиться активний нейрон в X-шарі. Крок 16. Пари 25 p1 нейронів-переможців 1 YJ , 2 YJ активізують відповідні їм елементи розпізнавального шару X1 . j Крок 17. Останов. Таким чином розроблено нейромережевий пристрій класифікації динамічних процесів, який не накладає обмеження на послідовність пред'явлення навчальних зображень, має можливість запам'ятовувати й відновляти з пам'яті пристрою класи зображень які представлені у вигляді векторів з безперервними складовими, відносить зображення однакові за формою але різні за амплітудою до різних класів зображень, та має можливість донавчатися в процесі свого функціонування. Джерела інформації: 1. Патент Російської Федерації на корисну модель № 2176815, кл. G06F 15/00, 2001 р. 2. Патент України на корисну модель № u 2010 08417, кл. G06G 7/00, 2010 р. 3. Дмитриенко В.Д. Вычислительное устройство для распознавания режимов функционирования динамических объектов / В.Д. Дмитриенко, А.Ю. Заковоротный, В.М. Терехина // Вісник НТУ "ХПІ", Збірник наукових праць. Тематичний випуск: Інформатика і моделювання. - Харків: НТУ "ХПІ". - 2004. - № 34. - С. 70-81. 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 Нейромережевий пристрій класифікації динамічних процесів з можливістю блокування частини вхідного зображення, створений на основі безперервних нейронних мереж адаптивної резонансної теорії, що складається з сенсорного шару нейронів, який відрізняється тим, що в його склад введено шар блокуючих нейронів, які, з одного боку, послідовно пов'язані між собою парами двонаправлених зв'язків, а з іншого боку, кожен з нейронів блокуючого шару елементів з'єднуються вихідними зв'язками з усіма нейронами сенсорного шару та вхідними зв'язками усіма нейронами спільного розпізнавального шару, елементи якого зв'язані однонаправленими вхідними зв'язками з відповідними їм елементами розпізнавальних шарів нейронів двох модулів, та спільним вирішуючим нейроном пристрою класифікації динамічних процесів, два паралельно працюючих модуля являють собою модифіковані безперервні нейроні мережі 8 UA 93317 U 5 10 15 адаптивної резонансної теорії, кожен з яких включає в себе шар інтерфейсних елементів, нейрони якого зв'язані вхідними однонаправленими зв'язками з відповідним їм елементами сенсорного шару нейронів пристрою класифікації динамічних процесів та нормуючим нейроном модуля, який у свою чергу зв'язаний вхідними зв'язками з кожним елементом сенсорного шару нейронів, та вихідними зв'язками з кожним з елементів у інтерфейсному шарі нейронів й шар розпізнавальних елементів, нейрони якого зв'язані бінарними однонаправленими вихідними зв'язками з відповідними їм розпізнавальними нейронами другого модуля пристрою, парами двонаправлених зважених зв'язків з безперервними ваговими коефіцієнтами з кожним із елементів інтерфейсного шару модуля, та бінарними однонаправленими вихідними зв'язками з відповідними їм спільними розпізнавальними нейронам пристрою класифікації динамічних процесів й вирішаючий нейрон модуля, який пов'язаний збуджуючими бінарними вихідними однонаправленими зв'язками з усіма елементами розпізнавального шару модуля нейронної мережі та спільними вирішуючим нейроном пристрою класифікації динамічних процесів, та гальмуючими бінарними вхідними однонаправленими зв'язками з усіма елементами інтерфейсного шару нейронів модуля та спільний вирішуючий нейрон пристрою класифікації динамічних процесів, який в свою чергу, зв'язаний бінарними однонаправленими вихідними зв'язками з всіма елементами спільного розпізнавального шару нейронів пристрою класифікації динамічних процесів та бінарними однонаправленими вхідними зв'язками з вирішуючими нейронами кожного модуля пристрою класифікації динамічних процесів. 20 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Автори англійськоюZakovorotnyy Oleksandr Yuriiovych
Автори російськоюЗаковоротный Александр Юрьевич
МПК / Мітки
МПК: G06G 7/00
Мітки: частини, нейромережевий, блокування, можливістю, процесів, класифікації, пристрій, зображення, динамічних, вхідного
Код посилання
<a href="https://ua.patents.su/11-93317-nejjromerezhevijj-pristrijj-klasifikaci-dinamichnikh-procesiv-z-mozhlivistyu-blokuvannya-chastini-vkhidnogo-zobrazhennya.html" target="_blank" rel="follow" title="База патентів України">Нейромережевий пристрій класифікації динамічних процесів з можливістю блокування частини вхідного зображення</a>
Нейромережевий пристрій для розпізнавання та класифікації динамічних процесів
Номер патенту: 74414
Опубліковано: 25.10.2012
Автори: Заковоротний Олександр Юрійович, Дмитрієнко Валерій Дмитрійович
МПК: G06G 7/60
Мітки: пристрій, динамічних, класифікації, нейромережевий, розпізнавання, процесів
Формула / Реферат:
Нейромережевий пристрій для розпізнавання та класифікації динамічних процесів, створений на основі безперервних нейронних мереж адаптивної резонансної теорії складається з сенсорного шару нейронів, який відрізняється тим, що до його складу введено шар інтерфейсних елементів, нейрони якого зв'язані вхідними зв'язками з нормуючим нейроном, вихідними зв'язками з керуючим нейроном та зваженими двонаправленими зв'язками з кожним нейроном...
Нейромережевий пристрій для розпізнавання зображень
Номер патенту: 93316
Опубліковано: 25.09.2014
Автори: Заковоротний Олександр Юрійович, Дмитрієнко Валерій Дмитрович
МПК: G06G 7/60
Мітки: пристрій, розпізнавання, зображень, нейромережевий
Формула / Реферат:
Нейромережевий пристрій для розпізнавання зображень, створений на основі безперервної нейронної мережі адаптивної резонансної теорії, складається з сенсорного та розпізнавального шарів нейронів, який відрізняється тим, що до його складу введено шар інтерфейсних нейронів, які зв'язані вхідними зв'язками з нормуючим нейроном та відповідними сенсорними нейронами, а також вихідними зв'язками з керуючим нейроном та зваженими двонаправленими...
Пристрій розпізнавання й класифікації образів

Номер патенту: 68375
Опубліковано: 26.03.2012
Автори: Котов Ігор Ігорович, Заковоротний Олександр Юрійович, Дмитрієнко Валерій Дмитрійович
МПК: G06K 9/00
Мітки: класифікації, розпізнавання, пристрій, образів
Формула / Реферат:
Пристрій розпізнавання й класифікації образів, що складається з сенсорного шару нейронів (блоку порогових елементів), який відрізняється тим, що в нього введений шар інтерфейсних елементів, нейрони якого пов'язані з відповідними їм елементами сенсорного шару вхідними бінарними односпрямованими зв'язками, шар розпізнавальних елементів, нейрони якого пов'язані з кожним з елементів у інтерфейсному шарі парами двонаправлених зважених зв'язків з...
Спосіб синтезу та навчання багатошарової нейронної мережі класифікації образів
Номер патенту: 61619
Опубліковано: 17.11.2003
Автори: Жеманюк Павло Дмитрович, Субботін Сергій Олександрович, Дубровін Валерій Іванович
Мітки: нейронної, образів, класифікації, багатошарової, мережі, спосіб, навчання, синтезу
Формула / Реферат:
Спосіб синтезу та навчання багатошарової нейронної мережі класифікації образів, який полягає у тому, що навчання нейромережі здійснюють на основі заданої навчальної вибірки даних, яку використовують для визначення ваг мережі, який відрізняється тим, що спочатку формують кластери у просторі ознак навчальної вибірки, при цьому визначають координати центрів кластерів, після чого структуру та топологію нейромережі задають у відповідності до...
Пристрій для дослідження параметрів моделей періодичних процесів у нейронних мережах
Номер патенту: 64610
Опубліковано: 10.11.2011
Автор: Лехціер Тетяна Ігорівна
МПК: G06N 3/00
Мітки: дослідження, моделей, параметрів, мережах, процесів, нейронних, періодичних, пристрій
Формула / Реферат:
Пристрій для дослідження параметрів моделей періодичних процесів у нейронних мережах, який містить блок введення даних і нейронну мережу, який відрізняється тим, що пристрій оснащено блоком інтегрування функцій, причому вхід цього блока з'єднано з виходом блока введення даних, а вихід блока інтегрування функцій підключено до другого входу нейронної мережі, вихід якої підключено до другого входу блока введення даних.
Попередній патент: Нейромережевий пристрій для розпізнавання зображень
Наступний патент: Гальванічне покриття сплавами заліза для зміцнення поверхні деталей зі сталі та чавуну
Випадковий патент: Спосіб моделювання фізичної опіоїдної залежності у щурів, які перебувають під впливом етанолу