Нейромережевий пристрій для розпізнавання та класифікації динамічних процесів
Номер патенту: 74414
Опубліковано: 25.10.2012
Автори: Дмитрієнко Валерій Дмитрійович, Заковоротний Олександр Юрійович
Формула / Реферат
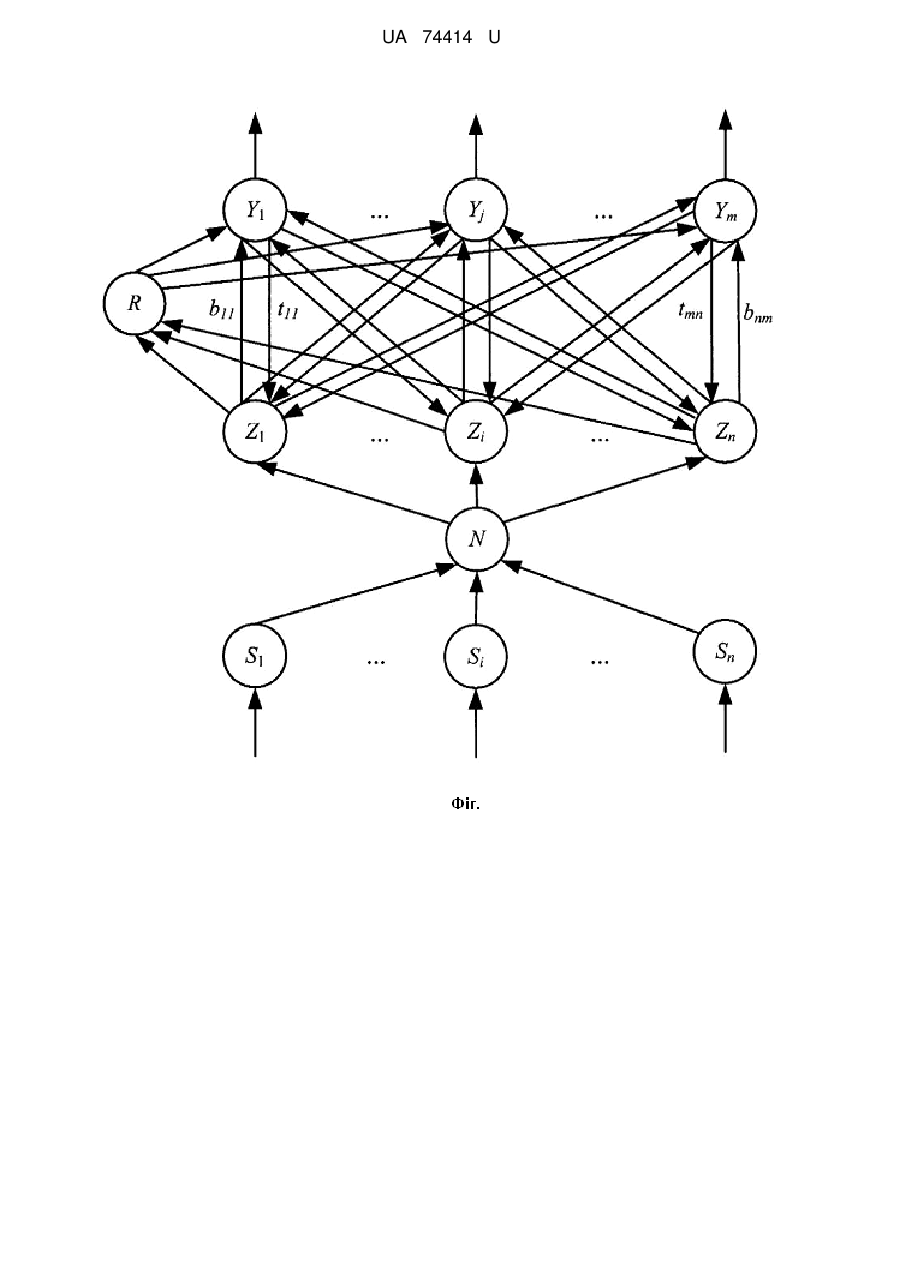
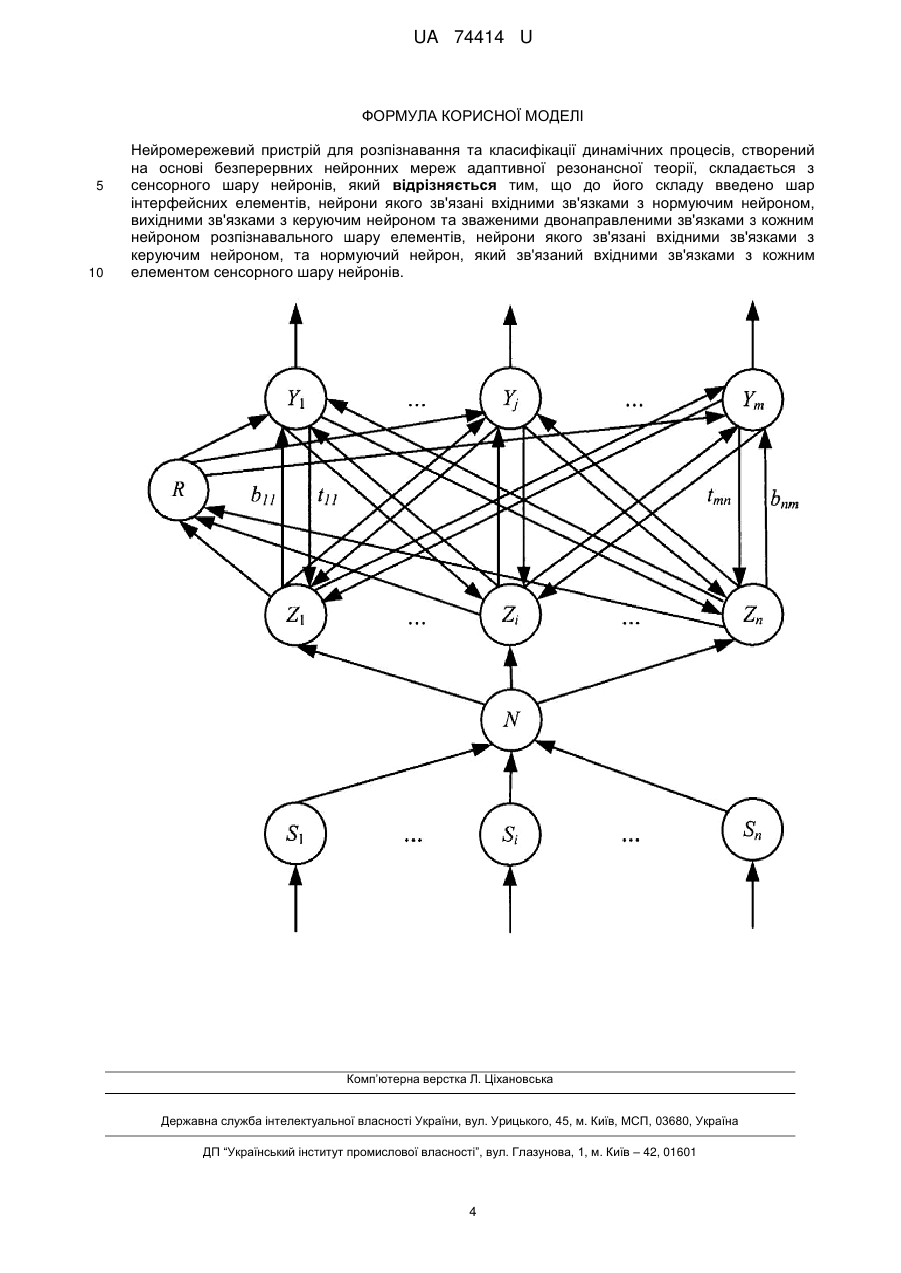
Нейромережевий пристрій для розпізнавання та класифікації динамічних процесів, створений на основі безперервних нейронних мереж адаптивної резонансної теорії складається з сенсорного шару нейронів, який відрізняється тим, що до його складу введено шар інтерфейсних елементів, нейрони якого зв'язані вхідними зв'язками з нормуючим нейроном, вихідними зв'язками з керуючим нейроном та зваженими двонаправленими зв'язками з кожним нейроном розпізнавального шару елементів, нейрони якого зв'язані вхідними зв'язками з керуючим нейроном, та нормуючий нейрон, який зв'язаний вхідними зв'язками з кожним елементом сенсорного шару нейронів.
Текст
Реферат: UA 74414 U UA 74414 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до обчислювальної техніки, зокрема до області побудови автоматизованих систем керування, а саме до напрямку створення систем діагностики й керування складними технічними об'єктами. Корисна модель може бути використаний при побудові систем керування або діагностики такого складного технічного об'єкта як дизель-поїзд з асинхронним тяговим електроприводом. Відомій пристрій для розпізнавання образів складається з багатоканального комутатора, аналого-цифрового перетворювача й логічних елементів І, причому інформаційний вхід багатоканального комутатора є інформаційним входом всього пристрою, адресні входи багатоканального комутатора підключені до виходів лічильника адреса та до адресних входів старших розрядів блока пам'яті, а вихід багатоканального комутатора підключений до інформаційного входу аналого-цифрового перетворювача, виходи якого у свою чергу, підключені до адресних входів молодших розрядів блока пам'яті, виходи якого підключені безпосередньо до інформаційних входів блока регістрів зсуву та до перших входів блока логічних елементів І, другі входи якого об'єднані та підключені до виходу блока керування, а виходи підключені до відповідних зсувних входів блока регістрів зсуву, а вхід блока керування є керуючим входом всього пристрою [1]. Недоліком відомого пристрою для розпізнавання образів є те, що він накладає обмеження на послідовність пред'явлення навчальних зображень. Відомій пристрій для розпізнавання зображень, містіть: приймач зображення, вентиль, синхронізатор, два регістри зсуву, два лічильника, генератор одиночних імпульсів, суматор по модулю два, блок пам'яті та блок порівняння, й відрізняються тим, що з ціллю підвищення вірогідності розпізнавання орієнтирів, зокрема антропогенних, за рахунок використання третьої незалежної ознаки кількості кутів зображення орієнтира в нього включені два елементи затримки, три суматори по модулю два та лічильник, при цьому перший вхід вентиля приєднаний до виходу приймача зображень, другий вхід з виходом синхронізатора, а вихід з входом першого лічильника, а також з інформаційними входами другого регістра зсуву та генератора одиночних імпульсів, керуючі входи якого приєднані до виходу синхронізатора; вихід генератора одиночних імпульсів підключений до першого входу другого лічильника, вихід другого регістру зсуву до інформаційного входу першого регістру зсуву та першого входу першого суматору по модулю два; керуючий вхід першого регістру зсуву підключений до виходу синхронізатора, а вихід до другого входу першого суматора по модулю два, вихід якого приєднаний до другого входу другого лічильника; крім того, виходи першого та другого регістра зсуву приєднані до перших входів відповідно другого та третього суматорів по модулю два безпосередньо, а з другими входами тих же суматорів по модулю два через елементи затримки, виходи другого та третього суматорів по модулю два приєднані до першого та другого входів четвертого суматора по модулю два, вихід якого приєднаний до входу третього лічильника; виходи першого, другого та третього лічильників з'єднані з відповідними входами блока порівняння, четвертий вхід якого з'єднаний з виходом блока пам'яті, а вихід є виходом всього пристрою [2]. При порівнянні з першим аналогом пристрій для розпізнавання зображень не накладає обмежень на послідовність пред'явлення навчальних зображень, однак у розглянутого пристрою відсутня можливість запам'ятовувати й відновляти з пам'яті зображення які представлені у вигляді векторів з безперервними складовими, крім того у розглянутого пристрою відсутня можливість донавчання в процесі його функціонування. Найбільш близьким до заявленого пристрою є обчислювальний пристрій для розпізнавання режимів функціонування динамічних об'єктів, що містить у собі шар сенсорних елементів, нейрони якого зв'язані парами двонаправлених зв'язків з відповідними їм нейронами інтерфейсного шару, елементи якого зв'язані бінарними односпрямованими вхідними зв'язками з першим нормалізуючим модулем й відповідними їм нейронами першого обробного шару, елементи якого, у свою чергу, зв'язані бінарними односпрямованими вхідними зв'язками з першим нормалізуючим модулем та бінарними односпрямованими вихідними зв'язками з відповідними їм нейронами другого обробного шару, які, у свою чергу, зв'язані бінарними односпрямованими вихідними зв'язками з другим нормалізуючим модулемта відповідними їм нейронами четвертого обробного шару, елементи якого зв'язані бінарними односпрямованими вихідними зв'язками з відповідними їм нейронами інтерфейсного та керуючого шарів, а також бінарними односпрямованими вхідними зв'язками з другим нормалізуючим модулем, й парами двонаправлених зважених зв'язків з безперервними ваговими коефіцієнтами з нейронами проміжного шару, при цьому, кожний з нейронів керуючого шару зв'язаний бінарними односпрямованими вихідними зв'язками з керуючим нейроном, що, у свою чергу, зв'язаний бінарними односпрямованими вихідними зв'язками з кожним з нейронів розпізнавального шару, 1 UA 74414 U 5 10 15 20 25 30 35 40 45 50 55 елементи якого зв'язані двонаправленими зваженими зв'язками з безперервними ваговими коефіцієнтами з кожним з нейронів проміжного шару, відповідні елементи якого зв'язані бінарними односпрямованими вихідними зв'язками з відповідними їм нейронами керуючого шару елементів, третім нормалізуючим модулем, а також з відповідними їм нейронами третього обробного шару, елементи якого зв'язані бінарними односпрямованими вхідними зв'язками з третім нормалізуючим модулем, а також бінарними вихідними односпрямованими зв'язками з відповідними їм нейронами другого обробного шару [3]. При порівнянні з відомими аналогами пристрій - прототип (обчислювальний пристрій для розпізнавання режимів функціонування динамічних об'єктів) здатний донавчатися в процесі свого функціонування, та зберігати й відновлювати зі своєї пам'яті вектора, які складаються з безперервних складових. Однак нормування компонент вхідного вектора, яке закладено в структурі пристрою, відносить зображення однакові за формою але різних за амплітудою до одного класу зображень. Таким чином, недоліком прототипу є закладене у структурі пристрою нормування компонент вхідного вектора, яке відносить зображення однакові за формою але різних за амплітудою до одного класу зображень. Задача корисної моделі - розробка нейромережевого пристрою для розпізнавання та класифікації динамічних процесів, що не накладає обмежень на послідовність пред'явлення навчальних зображень, має можливість запам'ятовувати й відновляти з пам'яті пристрою зображення, які представлені у вигляді векторів з безперервними складовими, має можливість донавчатися в процесі свого функціонування та відносити до різних класів зображення однакові за формою але різних за амплітудою. Задача вирішується завдяки тому, що обчислювальний пристрій для розпізнавання режимів функціонування динамічних об'єктів перебудовується шляхом введення в його структуру шару інтерфейсних елементів, нейрони, якого зв'язані вхідними зв'язками з нормуючим нейроном та відповідними сенсорними нейронами, а також вихідними зв'язками з керуючим нейроном та зваженими двонаправленими зв'язками з кожним нейроном розпізнавального шару елементів, нейрони якого зв'язані вхідними зв'язками з керуючим нейроном, та нормуючий нейрон, який зв'язаний вхідними зв'язками з кожним елементом сенсорного шару нейронів. Корисна модель ілюструється зображенням Креслення, на якому приведена схема нейромережевого пристрою для розпізнавання та класифікації динамічних процесів, яка розроблена на основі безперервних нейронних мереж адаптивної резонансної теорії. Нова архітектура пристрою включає три шари нейронів: шар сенсорних S-нейронів, сигнали яких нормуються за допомогою нормуючого модуля N; шар проміжних Z-нейронів; шар розпізнавальних Y-нейронiв, а також керуючий R-нейрон. В основу навчання розробленого нейромережевого пристрою покладено алгоритм швидкого навчання, який передбачає, що ваги зв'язків Y-нейрона, що переміг досягають рівноважних значень при кожному пред'явленні навчального вектора. В алгоритмі прийняті наступні позначення: m - максимальне число елементів у Y-шарі або максимальне число образів, що розпізнаються; n - число компонент у вхідному векторі; k S -n-мірний вхідний вектор, k=1,…,q; q - число вхідних векторів; Si max - максимально можливе значення компонент для вхідних векторів; р - параметр подібності, діапазон доступних значень параметру: 0
ДивитисяДодаткова інформація
Назва патенту англійськоюNeural network device for recognition and classification of dynamic processes
Автори англійськоюDmytriienko Valerii Dmytrovych, Zakovorotnyy Oleksandr Yuriiovych
Назва патенту російськоюНейросетевое устройство для распознавания и классификации динамических процессов
Автори російськоюДмитриенко Валерий Дмитриевич, Заковоротный Александр Юрьевич
МПК / Мітки
МПК: G06G 7/60
Мітки: класифікації, динамічних, процесів, пристрій, розпізнавання, нейромережевий
Код посилання
<a href="https://ua.patents.su/6-74414-nejjromerezhevijj-pristrijj-dlya-rozpiznavannya-ta-klasifikaci-dinamichnikh-procesiv.html" target="_blank" rel="follow" title="База патентів України">Нейромережевий пристрій для розпізнавання та класифікації динамічних процесів</a>
Пристрій розпізнавання й класифікації образів

Номер патенту: 68375
Опубліковано: 26.03.2012
Автори: Дмитрієнко Валерій Дмитрійович, Заковоротний Олександр Юрійович, Котов Ігор Ігорович
МПК: G06K 9/00
Мітки: класифікації, розпізнавання, пристрій, образів
Формула / Реферат:
Пристрій розпізнавання й класифікації образів, що складається з сенсорного шару нейронів (блоку порогових елементів), який відрізняється тим, що в нього введений шар інтерфейсних елементів, нейрони якого пов'язані з відповідними їм елементами сенсорного шару вхідними бінарними односпрямованими зв'язками, шар розпізнавальних елементів, нейрони якого пов'язані з кожним з елементів у інтерфейсному шарі парами двонаправлених зважених зв'язків з...
Пристрій для розпізнавання випадкових процесів

Номер патенту: 25008
Опубліковано: 25.07.2007
Автори: Рябова Любов Володимирівна, Глухимчук Михайло Іванович, Ярова Яна Сергіївна, Подгорний Євген Іванович
МПК: G06F 15/00
Мітки: процесів, пристрій, випадкових, розпізнавання
Формула / Реферат:
Пристрій для розпізнавання випадкових процесів, що містить два елементи затримки, блок віднімання, блок вибору максимуму, формувач квадрата першого статистичного моменту і блок ділення, який відрізняється тим, що додатково введені фільтр, інвертор, другий квадратичний формувач, два блоки підсумовування та чотиривходовий блок прийняття рішень, причому загальний вхід пристрою розпізнавання паралельно підключений до першого входу блока...
Пристрій для формування ознак розпізнавання образів
Номер патенту: 38500
Опубліковано: 12.01.2009
Автори: Осінський Володимир Іванович, Кожем'яко Володимир Прокопович, Мартинюк Тетяна Борисівна, Чечельницький Олег Іванович, Ботвин Роман Ігорович
МПК: G06K 9/00
Мітки: ознак, образів, розпізнавання, пристрій, формування
Формула / Реферат:
Пристрій для формування ознак розпізнавання образів, який містить об'єктив, оптично зв'язаний з діафрагмою і через розподільник світлового потоку з приймачем випромінювання, блок керування, з'єднаний з діафрагмою і з блоком обчислення дисперсії, суматор, з'єднаний з блоком обчислення дисперсії, оптично зв'язаним з розподільником світлового потоку, блок визначення різниці сигналів, підключений до виходів приймача випромінювання, і блок...
Пристрій для розпізнавання образів
Номер патенту: 55924
Опубліковано: 27.12.2010
Автори: Бондарчук Інна Василівна, Сачанюк-Кавецька Наталія Василівна, Мартинюк Тетяна Борисівна
МПК: G06K 9/00
Мітки: пристрій, образів, розпізнавання
Формула / Реферат:
Пристрій для розпізнавання образів, що містить блок порогових елементів, блок зважування, обчислювальний блок, блок упорядкування навчальних сигналів, входи якого підключені до виходів блока порогових елементів, і блок формування цілочисельних ваг, входи якого з'єднані з відповідними виходами блока упорядкування навчальних сигналів, а виходи - з керуючими входами блока зважування, який відрізняється тим, що в нього введений блок суматорів,...
Пристрій аналогової двонаправленої асоціативної пам’яті
Номер патенту: 47481
Опубліковано: 10.02.2010
Автори: Заковоротний Олександр Юрійович, Дмитрієнко Валерій Дмитрійович, Мазуріка Роман Сергійович
МПК: G06G 7/60
Мітки: пам'яті, аналогової, асоціативної, пристрій, двонаправленої
Формула / Реферат:
Пристрій аналогової двонаправленої асоціативної пам'яті, створений на основі нейронних мереж адаптивної резонансної теорії (APT), що складається із двох сенсорних шарів нейронів, проміжного шару нейронів, елементи якого зв'язані парами бінарних двонаправлених зважених зв'язків з усіма елементами шару загальних вирішальних нейронів двох модулів, до складу першого з яких входять два паралельно працюючі підмодулі, зв'язані один з одним...
Попередній патент: Двигун змінного струму
Наступний патент: Вібраційний змішувач