Спосіб контролю віддалених датчиків та пристрій для його здійснення
Номер патенту: 9858
Опубліковано: 30.09.1996
Автори: Стрекалова Леонора Олександрівна, Мезніков Артур Володимирович, Стаднік Микола Іванович
Формула / Реферат
(57) 1. Способ контроля удаленных датчиков, заключающийся в передаче по линии связи выпрямленного однополупериодного напряжения, из которого формируют импульсы, соответствующие состоянию датчиков, контроль импульсов осуществляют путем сравнения сформированных импульсов с эталонными и формируют по результатам сравнения команды управления, отличающийся тем, что при включенном состоянии датчиков формируют последовательность импульсов одной длительности, при отключенном - другой длительности, и при контроле сравнивают длительности сформированных импульсов с эталонными временными интервалами.
2. Устройство для контроля удаленных датчиков, содержащее двухпроводную линию связи, на одном конце которой подключены последовательно выпрямительный диод и контакт датчика, на другом соединенный с проводами линии связи источник переменного напряжения, блок контроля и формирования команд и исполнительный элемент, отличающееся тем, что в него введены формирователь длительности импульсов, элемент гальванический развязки, элемент индикации, элемент сопряжения, а выход исполнительного элемента является выходом устройства и объединен с одним выводом элемента индикации, второй вывод которого и вход исполнительного элемента подключены через элемент сопряжения с выходом блока контроля и формирования команд, входы которого соединены через элемент гальванической развязки с соответствующими выходами формирователя длительности импульсов, вход которого и вход элемента гальванической развязки подключены к соответствующим проводам линии связи.
Текст
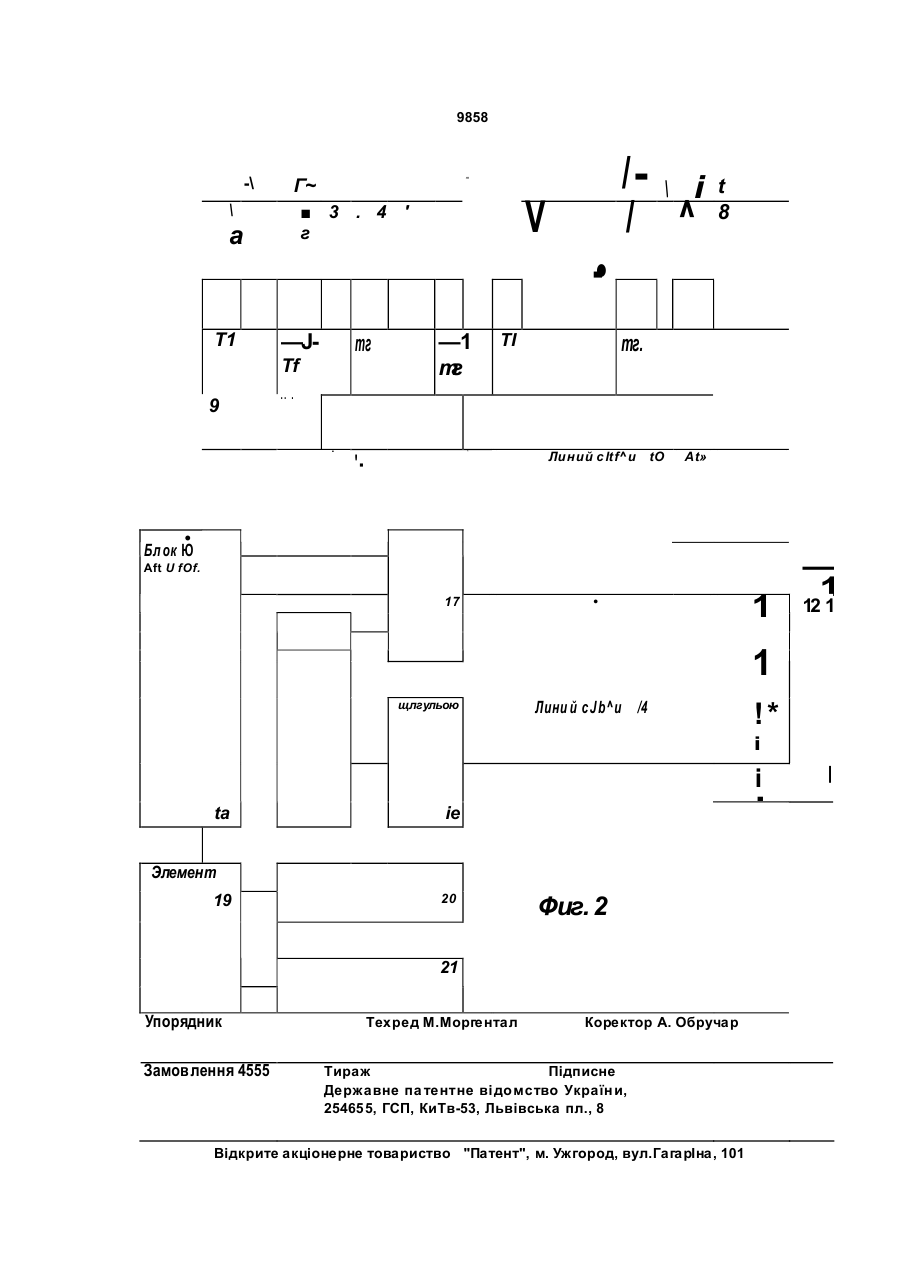
1. Способ контроля удаленных датчиков, заключающийся в передаче по линии связи выпрямленного однополупериодного на пряжения, из которого формируют импуль сы, соответствующие состоянию датчиков, контроль импульсов осуществляют путем сравнения сформированных импульсов с эталонными и формируют по результатам сравнения команды управления, отлича ющийся тем, что при включенном состо янии датчиков формируют последовательность импульсов одной длительности, при отключенном - другой длительности, и при контроле сравнивают длительности сформированных импульсов с эталонными временными интервалами. 2. Устройство для контроля удаленных датчиков, содержащее двухпроводную линию связи, на одном конце которой подключены последовательно выпрямительный диод и контакт датчика, на другом соединенный с проводами линии связи источник переменного напряжения, блок контроля и формирования команд и исполнительный элемент, отличающееся тем, что в него введены формирователь длительности импульсов, элемент гальванический развязки, элемент индикации, элемент сопряжения, а выход исполнительного элемента является выходом устройства и объединен с одним выводом элемента индикации, второй вывод которого и вход исполнительного элемента подключены через элемент сопряжения с выходом блока контроля и формирования команд, входы которого соединены через элемент гальванической развязки с соответствующими выходами формирователя длительности импульсов, вход которого и вход элемента гальванической развязки подключены к соответствующим проводам линии связи. Изобретение относится к горной электротехнике и может быть использовано в аппаратуре управления для контроля датчиков, где требуется контроль состояния линии. Современная аппаратура управления на конвейерном транспорте состоит, как правило, из нескольких функциональных узлов: узла сопряжения и контроля линии связи и датчиков, блока управления и сер с > 00 ел со о 9858 оисных узлов [1J. Узел сопряжения и контроля пред назначен для формирования д искре тног о с игна ла, с игна лизи ру ющ его о состоянии контролиру емой линии сзязи или датчиков. В нас тоящ ее время узлы сопряж ения и контроля с троятся на аналоговом спос обе. Данный с пос об основан на с равнении амплитуды сигнала, пос тупившей из линии связи, с э та лонн ой в елич иной, з ад анно й непос редс твенно в ус тройс тве. Наличие в контролиру емой линий с вязи изменяющегос я с опротивления ш лейфа, активных и емкос тных у течек привод ит к больш им аппаратным затратам д ля обеспечения надежного функ ционирования аппарату ры. В нас тоящ ее время аппарату ра у правления конвейерным транспортом д олжна контролировать большое количес тво датчиков, как тех нологических, так и аварийных, обеспечивающих безопаснос ть при эксплуатации конвейерного транспорта. Количество таких датчиков мож ет дос тигать нескольких десятков. В д альнейш ем пред полагаетс я рост их количества из-за ввода новых датчиков д ля более детального контроля сос тояния конвейера. Поэ тому, невозможно при разработке новой аппарату ры у правления использовать традиционные узлы сопряжения и контроля из-за с ложнос ти и громоздкос ти, т. к . их ис пользова ние в ызове т значительное увеличение с тоимос ти аппарату ры, ее габаритов и приведет к снижению над ежнос ти ее работы. В с вязи с вышеизложенным, при разработке аппарату ры управления на базе микропроцессорной тех ник и возникла зад ача - упрощ ение узлов сопряжения и контроля, что можно достичь решением основных фу нкций узла в блоке управления при обработке, пос тупив-' шего сигнала не в аналоговом виде, а в цифровом. Наиболее близким по тех нической сущ нос ти заявленному с пос обу являетс я способ [ 2], основанный на перед аче по линии связи выпрямленного однополупериодно го на п ряж е н ия, фо р м ир о ва н и и и з которого импу льсов, соответс твующих сос тоянию д атчиков, контроль импу льс ов осуществляют пу тем сравнения с формированных импу льс ов с э талонными и формируют по резу льтатам сравнения команд ы управления. Наиболее близким по технической сущ ности данному устройс тву является устройство, с од ержащее двух провод ную линию связи, на одном конце которой подключены диод и контакт датчика, и на другом, источник переменного напряж ения, блок контроля и формирование команд и ис полнительный элемент [3]. Однак о извес тные спос об и устройс тво громоздки по аппаратным затратам д ля выполнения контроля с ос тояния д атчиков и линии связи. 5 В основу изобретения пос тавлена задача с оздания такого с пос оба контроля удаленных д атчиков и у с тройс тва д ля е го осуществления, в котором за счет исключения из узла с опряжений функций контроля 10 и полного анализа импульсов, пос тупивших из линии с вязи, и возлож ения их на блок контроля, упрощ алась аппаратная реализация узлов сопряжений. Пос тавленная аад ача реш аетс я благо15 д аря тому, что в извес тном способе, аклкачающ емс я в перед аче по линии с вязи выпрямленного однополупериодного напряжения, из которого формируют импу ль сы соответс твующие с ос тоянию д атчиков, 20 контроль импу льс ов осущес твляют пу тем сравнения с формированных импу льс ов с эталонными и формируют по результатам сравнения команды управления, согласно изобретению при включенном с ос тоянии 25 датчиков формируют последовательность импульсоа одной длительнос ти, при отключенном - д ругой длительнос ти, и при контроле сравнивают длительнос ти с формированных импу льс ов с э талонными временными ин30 тервалами. Пос тавленная задача реш ается татя") благодаря тому, что в известном устройстре, содержащем двухпровод ную линию свяги, на одном конце которой подключзны после35 довательно выпрямительный диод и контакт датчика, на другом - соединенный с проводами линии связи ис точник переменного ніпряжения, блок контроля и формирования команд и исполнительный элемент, соглас40 но изобретению, введены формирователь длительности импульсов, элемент гальвани ческой развязки, э лемент инд икации, э лемен т с опряж ения, вх од ы э лемен та инд икации и ис полнительног о э лемента М 45 ПОА ПЮЧЄНЬІ через э лемент сопряжения с выход ом блока контроля и формирования команд, вх од ы которого соед инены через элемент гальванической развязки с соответствующими вывод ами формирователя д ли50 тельнос ти импу льсов, вход которого и вход элемента гальванической развязки подключены к с оответс твующим проводам линии связи. 55 В данном с пос обе в качес тве э талонной величины ис пользу ется временная ус тавка - д лительнос ть импу льс а Т, кроме того для созд ания коэ ффициента возврата, чтобы устранить дребезг при изменении сос тояния линии, заданы две временные уставки, 9858 од на - на включение Ті, вторая Тг - на выключение (Ті > Тг). Реализовать д анный с пос об на практике можно различно. В нас тоящ ее время аппарату ра у правления с трои тс я на базе микропроцесс орной техники, поэ тому контроль длительнос ти и час тоты импульсов, пос тупивш их из формирователя импу льс ов, необх одимо возложить на моду ль управления. В д анном ус тройс тве э то приводит к значительному упрощению узла с опряжения линии с вязи с моду лем управления и функции узла сопряжения, в основном буду т сведены только к гальванической развязке. Также ус тройс тво, контролирующее линию связи пред лагаемым спос обом можно построить на интегральных микросхемах ("жестк ой" лог ик е). В данном с лучае и сч етч ик и фиксировали бы зад анную д лительнос ть пос тупившего импу льса и выд авали д иск ретные сигналы в модуль управления, сигнализиру ющ ие о с ос тоянии линии связи и датчиков. В э том ус тройс тве узел сопряжения и контроля будет значительно сложнее, т.к. в его функ ции входит контроль и полный анализ импу льсов, пос ту пивш их из линии связи, в то же время когда модуль управления только принимает решение. Сущнос ть спос оба контроля сос тояния д атчиков и линии связи иллюс триру ется фиг.1, ус тройс тво - на фиг.2. На фиг. 1 напряжение в линии с вязи 1, импу льс ы 2-8, с формированные на вх од е ус тройс тва, импу льс 9 - на вых од е ус тройс тв. На фиг.2, 10 - линия связи, 11 - датчик, с од ерж ащ ий размыкающ ий кон так т 12, включенный пос лед овательно с выпрямительным диодом 13, линия связи 14, источник переменного напряжения 15, формирователь д лительнос ти импу льсов 16, э лемент гальванической развязки 17, блок контроля и формирования команд 18, э лемент сопряжения 19, исполнительный элемент 20, элемент индикации 21. Сущнос ть спос оба и работа устройс тва, пред назначенного для его реализации, заключается в с ледующем. Полуволна напряжения, снимаемого с транс форматора 15, пос ту пает в линию связи 10 и через нормально закрытый контакт д атчика 12 и второй провод линии связи 14 на формирователь •длительнос ти импу льса 16, в котором импульс напряж ения, зависящ ий от с опротивления ш лейфа линии 10, 14 преобразуется в импу льс с длительнос тью, зависящей от со стояния линии (чем меньш е с опротивление шлейфа линии, тем больше длительнос ть и наоборот). В блоке контроля и формирования команд 18 задается уставка на включение 5 Ті, которая с равниваетс я с д лительнос тью преобразованных в формирователе 16 импу льс ов. Ес ли д лительнос ть полу ченного импу льс а 2 меньш е Ті, то ус тройс тво воспринимает сос тояние д атчика 11, как отклю 10 ченное, ес ли д лительнос ть импу льс а 3 больше Ті, то блок контроля и формирования команд 18 воспринимает его как срабатывание датчика 11, од новременно зад авая ус тавку на отключение Тг(Т2 < Ті), теперь все 15 пос ледующие импу льсы сравниваются с Т2 (отношение Т2/ Т1 - коэ ффициент возврата). Ус тройс тво будет воспринимать включенное сос тояние датчика д о тех пор, пок а д лите л ьн ос ть им пу льс а бу д е т б о льш е Тг 20 (импульс 4). Как только появитс я импульс 5, длительнос ть которого меньше Тг, устройс тво воспринимает э то как выключение датчика 11 и блок контроля и формирования команд 18 зад ает ус тавку Ті на включение. 25 В ус тройс тве также осуществляется самоконтроль линии связи, т.е. при ее поврежд ении формируется сигнал удвоенной частоты (импу льс ы 7,8), который вос принимаетс я как аварийный и блок контроля и формиро30 вания команд 18, в котором происх одят все вычис ления и логическая обработка резу льтатов производ ит отключение исполнительного элемента 20. При обрыве линии связи 10, 14 произой35 дет ситу ация, аналогичная выключению датчика. Формирователь д лительнос ти импу льсов 16 пред назначен д ля преобразования сигнала, пос ту пивш его из контролиру емой 40 линии связи, в д литель нос ть импу льса, которая зависит от сопротивления шлейфа линии связи 10,14. Блок контроля и формирования команд 18 зад ает ус тавки на включение и отключение у с тройс тва, вычис ляет д ли45 тельнос ть с фо рмированных импу льс ов, пос ту пающих на его вх од через э лемент гальванической развязки 17, выполняет логическую обрабоїку результатов, выдает кома нд ы на вк люч ен ие и л и о тк л юче н ие 50 исполнительного элемента 20 (блок контроля и формирования команд может быть выполнен на базе од нок рис тальной микро-ЭВМ ). Элемент сопряжения 19 служит для согласования выхода блока контроля и формирова55 ния команд 18 с исполнительным э лементом 20 и э лементом инд икации 21. 9858 -\ \ Т1 t 8 -• —J тг Tf 9 V 3 . 4 ' г а /- \ і / ^ m Г~ —1 т г тг. ТІ * ' Линий c ltf^u tO At» • Бл ок Ю Aft U fOf. 17 • 1 — 1 12 1 1 щлгульою Лини й cJb^u /4 !* і і ta L, іе Элемент 19 20 Фиг. 2 21 Упорядник Замов лення 4555 Техред М.Моргентал Коректор А. Обручар Тираж Підписне Державне па тентне ві домство України, 254655, ГСП, КиТв-53, Львівська пл., 8 Відкрите акціонерне товариство "Патент", м. Ужгород, вул.ГагарІна, 101 |
ДивитисяДодаткова інформація
Назва патенту англійськоюCheck method for remote sensors and device to realize it
Автори англійськоюMeznikov Artur Volodymyrovych, Stadnik Mykola Ivanovych, Strekalova Leonora Oleksandrivna
Назва патенту російськоюСпособ контроля удаленных датчиков и устройство для его осуществления
Автори російськоюМезников Артур Владимирович, Стадник Николай Иванович, Стрекалова Леонора Александровна
МПК / Мітки
МПК: G08C 19/16
Мітки: спосіб, датчиків, віддалених, контролю, пристрій, здійснення
Код посилання
<a href="https://ua.patents.su/4-9858-sposib-kontrolyu-viddalenikh-datchikiv-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю віддалених датчиків та пристрій для його здійснення</a>
Пристрій для дистанційного контролю становища по черзі працюючих контактних датчиків
Номер патенту: 7692
Опубліковано: 26.12.1995
Автори: Барданов Валерій Олександрович, Шапошнік Василь Іванович
МПК: G08C 19/16
Мітки: дистанційного, пристрій, працюючих, датчиків, контактних, черзі, контролю, становища
Формула / Реферат:
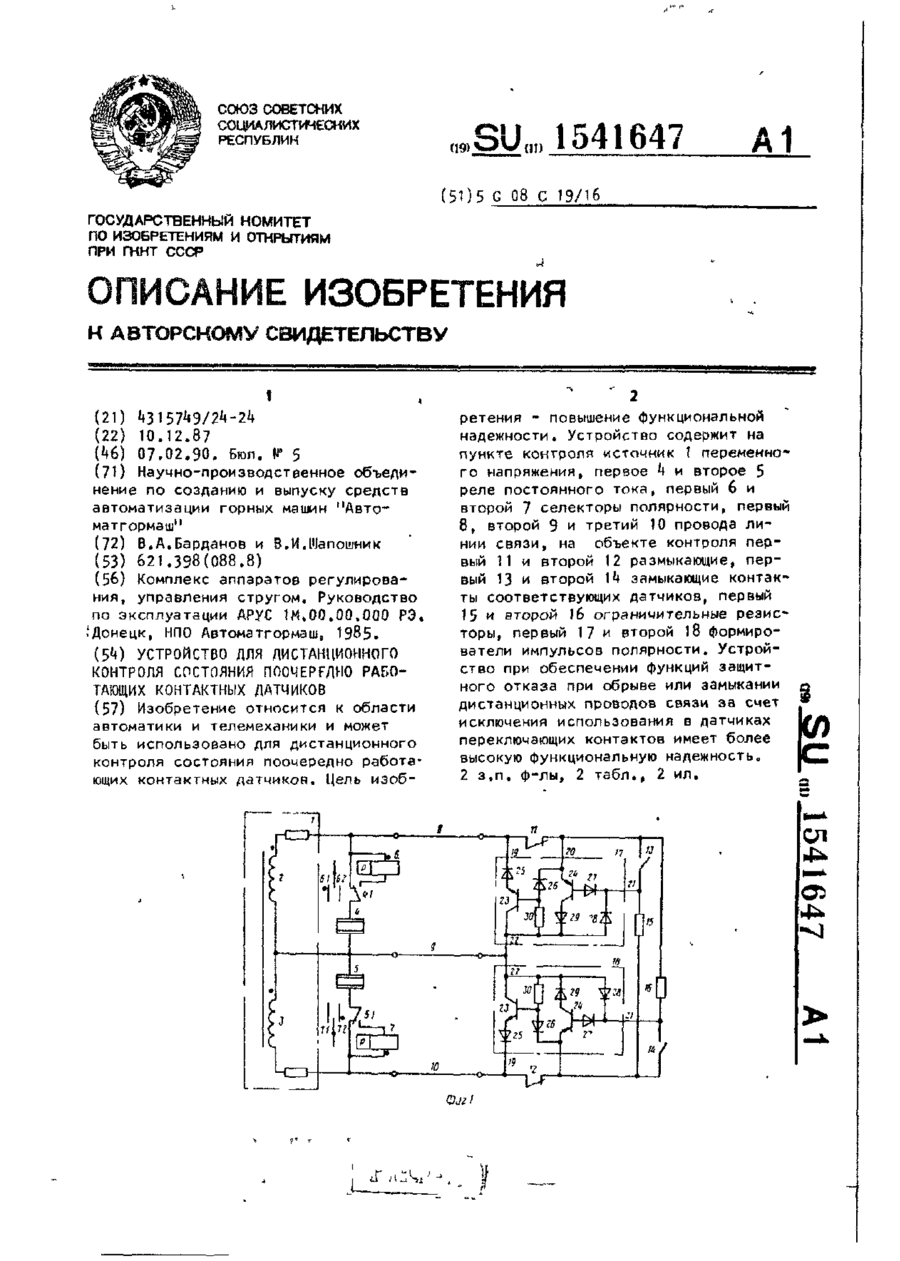
1. Устройство для дистанционного контроля состояния поочередно работающих контактных датчиков, содержащее на пункте контроля источник переменного напряжения, выполненный в виде трансформатора, начало первой выходной обмотки которого является первым выходом источника переменного напряжения, конец первой выходной обмотки которого соединен с началом второй выходной обмотки и является общим выходом источника переменного напряжения, конец...
Пристрій для контролю індукційних датчиків

Номер патенту: 1332
Опубліковано: 25.03.1994
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: G01R 31/02
Мітки: індукційних, пристрій, контролю, датчиків
Формула / Реферат:
1. Устройство для контроля индукционных датчиков, содержащее источник постоянного напряжения, резистор, первую и вторую клеммы для подключения к объекту контроля, первый вывод источника постоянного напряжения соединен с первым выводом резистора, второй вывод которого соединен с первой клеммой для подключения объекта контроля, второй вывод источника постоянного напряжения соединен с общей шиной, отличающееся тем, что, с целью расширения...
Спосіб контролю щільності твердої фази суспензій та пристрій для його здійснення
Номер патенту: 6266
Опубліковано: 29.12.1994
Автори: Моркун Володимир Станіславович, Потапов Віктор Миколайович
МПК: G01N 29/00
Мітки: щільності, спосіб, фазі, контролю, здійснення, пристрій, суспензій, твердої
Формула / Реферат:
1. Способ контроля плотности твердой фазы суспензий, заключающийся в том, что в исследуемую среду излучают ультразвуковую волну и измеряют ее амплитуду, отличающийся тем, что, с целью повышения точности, используют ультразвуковую волну Лэмба, которую генерируют на границе раздела исследуемой суспензии с заключающей ее емкостью, пропускают через исследуемую среду g-излучение и измеряют амплитуду ультразвуковой волны Лэмба и интенсивность...
Спосіб дискретного контролю місцезнаходження в лаві виконавчого органу стругу та пристрій для його здійснення
Номер патенту: 7689
Опубліковано: 26.12.1995
Автори: Кібрик Ісаак Соломонович, Барданов Валерій Олександрович, Торубалко Тарас Григорович
МПК: E21C 35/24
Мітки: місцезнаходження, виконавчого, дискретного, контролю, стругу, спосіб, здійснення, органу, пристрій, лави
Формула / Реферат:
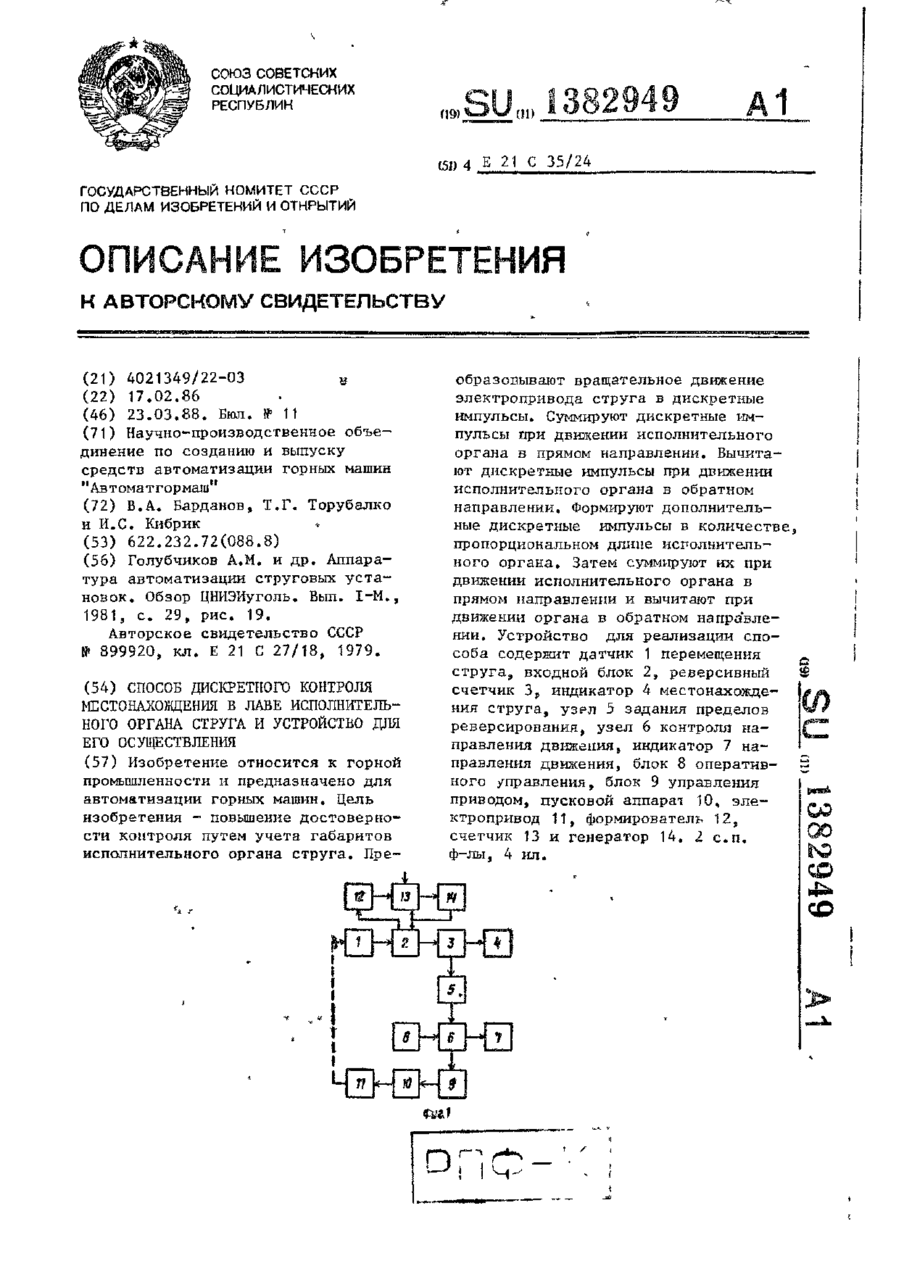
1. Способ дискретного контроля местонахождения в лаве исполнительного органа струга, заключающийся в преобразовании вращательного движения электропривода струга в дискретные импульсы, суммировании дискретных импульсов при движении исполнительного органа в прямом направлении и вычитании дискретных импульсов при движении исполнительного органа в обратном направлении, отличающийся тем, что, с целью повышения достоверности контроля путем...
Спосіб ультразвукового контролю гранулометричного складу матеріалів у потоці пульпи та пристрій для його здійснення
Номер патенту: 5148
Опубліковано: 28.12.1994
Автор: Моркун Володимир Станіславович
МПК: G01N 29/00
Мітки: ультразвукового, контролю, складу, пристрій, гранулометричного, потоці, пульпи, спосіб, здійснення, матеріалів
Формула / Реферат:
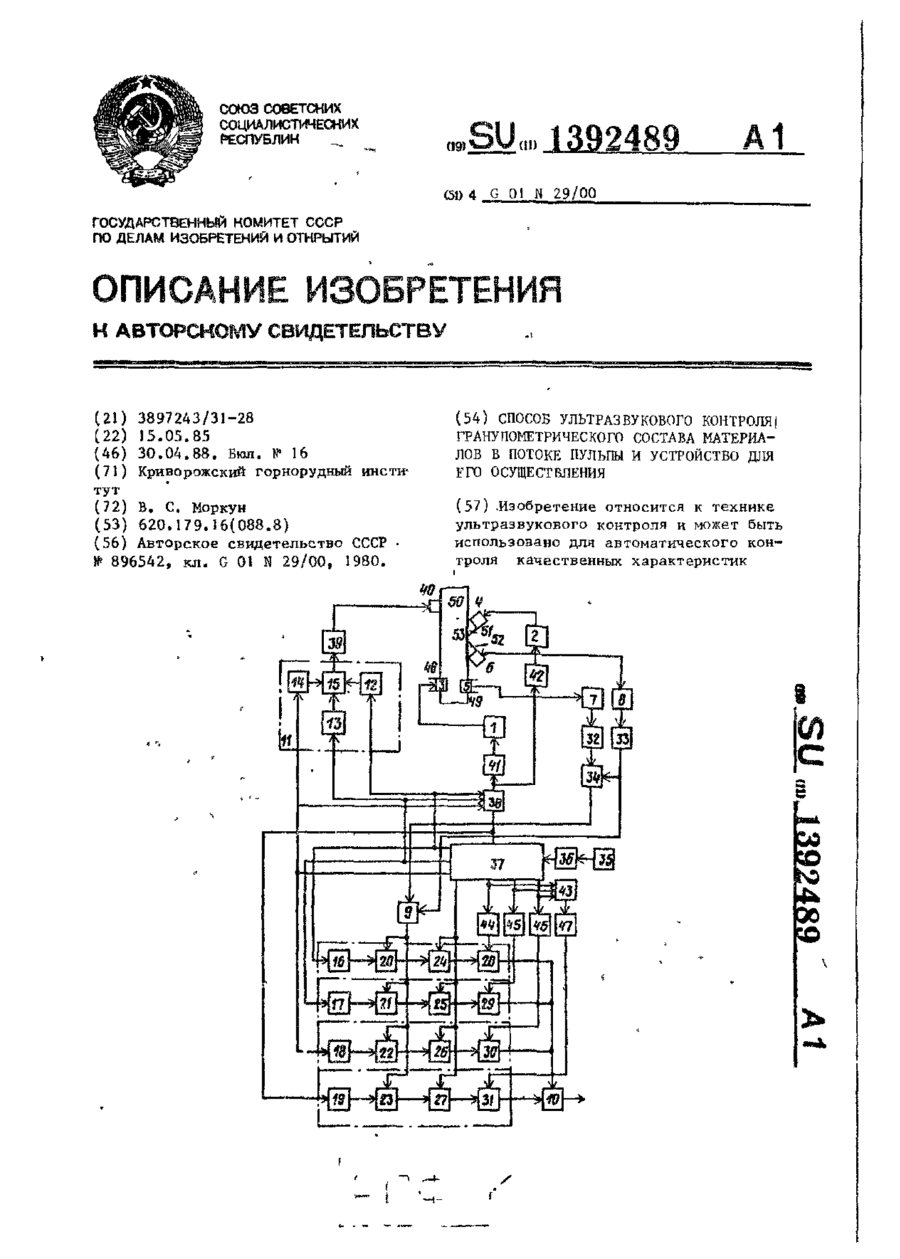
1. Способ ультразвукового контроля гранулометрического состава материалов в потоке пульпы, включающий излучение в поток пульпы и измерение амплитуды прошедших через поток ультразвуковых колебаний, отличающийся тем, что, с целью повышения точности контроля, в поток пульпы вводят измерительную пластину, возбуждают в ней волны Лэмба, измеряют амплитуду колебаний волн Лэмба, прошедших фиксированное расстояние, изменяют концентрацию и...
Попередній патент: Топка для спалювання твердого палива
Наступний патент: Термостатирований сцинтиляційний детектор
Випадковий патент: Спосіб профілактики сером після хірургічного лікування раку молочної залози