Перетворювач лінійного переміщення
Номер патенту: 27045
Опубліковано: 28.02.2000
Автори: Юзвинкевич Валентин Всеволодович, Терещенко Станіслав Васильович, Віноградов Михайло Юрійович, Охота Анатолій Григорович
Формула / Реферат
1. Преобразователь линейного перемещения, содержащий электронный блок со схемами измерения, управления и регистром, в котором один выход схемы управления соединен с одним из входов схемы измерения, а выход схемы измерения соединен с входом регистра, и первичный датчик, состоящий из имеющих возможность линейного перемещения друг относительного друга двух магнитопроводящих элементов - цилиндрической линейки и коаксиально охватывающей ее сигнальной головки в виде втулки, в одном из магнитопроводящих элементов на сопрягаемой цилиндрической поверхности выполнены два продольных диаметрально расположенных паза и пересекающий их ряд поперечных пазов, разделяющих цилиндрическую поверхность вдоль оси на ряд поперечных выступов, в продольных пазах уложена обмотка возбуждения, две стороны которой расположены параллельно образующим цилиндрической поверхности, в поперечных пазах размещены включаемые последовательно встречно секции выходной обмотки, отличающийся тем, что в поперечных пазах размещены две или больше идентичных выходных обмоток, секции которых охватывают два или более соседних поперечных выступов со смещением секций разных обмоток в осевом направлении на равные расстояния, а электронный блок содержит логический коммутатор, на входы которого подключены второй выход схемы управления и выходные обмотки первичного датчика, а выход соединен со вторым входом схемы измерения.
2. Преобразователь по п.1, отличающийся тем, что в первичном датчике осевая длина L магнитопровода, не имеющего пазов и обмоток на сопрягаемой цилиндрической поверхности, принимается по результатам расчета по формуле
L=na+(n+1)b
где n - число поперечных выступов, охватываемых одной секций выходной обмотки,
а и b - ширина соответственно поперечного выступа и поперечного паза, измеренная в направлении, параллельном образующим цилиндрической поверхности, при этом поперечные пазы выполнены под углом 90° к продольным пазам.
3. Преобразователь по п.1, отличающийся тем, что в первичном датчике поперечные пазы по отношению к продольным пазам выполняют под углом φ, определяемым по формуле
![]()
где d - диаметр цилиндрической поверхности, в которой выполнены пазы, а осевая длина L магнитопровода, не имеющего пазов и обмоток, определяется по формуле
L=n(a+b),
4. Преобразователь по пп.2 и 3, отличающийся тем, что в первичном датчике вместо одного магнитопроводящего элемента без пазов, применено два или больше идентичных магнитопроводящих элементов, при этом расстояние между их серединами устанавливается равным или кратным 2n(a+b), или отличается от этого расстояния на величину не более, чем ![]() .
.
5. Преобразователь по пп.2 и 3, отличающийся тем, что в первичном датчике дополнительно применена одна или несколько выходных обмоток грубого отсчета, состоящих из ряда катушек, среди которых имеются занимающие в осевом направлении длину, равную или превышающую половину диапазона перемещения одного магнитопроводящего элемента относительно другого, при этом электронный блок содержит дополнительно схему согласования грубого и точного отсчетов, вход которой соединен с выходом схемы измерения, а выход соединен с входом регистра, и логический коммутатор содержит дополнительные входы, на которые включены выходные обмотки грубого отсчета.
Текст
1. Преобразователь линейного перемещения, содержащий электронный блок со схемами измерения, управления и регистром, в котором один выход схемы управления соединен с одним из входов схемы измерения, а выход схемы измерения соединен со входом регистра, и первичный датчик, состоящий из имеющих возможность линейного перемещения друг относительного друга двух магнитопроводящих элементов - цилиндрической линейки и коаксиально охватывающей ее сигнальной головки в виде втулки, в одном из магнитопроводящих элементов на сопрягаемой цилиндрической поверхности выполнены два продольных диаметрально расположенных паза и пересекающий их ряд поперечных пазов, разделяющих цилиндрическую поверхность вдоль оси на ряд поперечных выступов, в продольных пазах уложена обмотка возбуждения, две стороны которой располо жены параллельно образующим цилиндрической поверхности, в поперечных пазах размещены включаемые последовательно встречно секции выходной обмотки, о т л и ч а ю щ и й с я тем, что в поперечных пазах размещены две или больше идентичных выходных обмоток, секции которых охватывают два или более соседних поперечных выступов со смещением секций разных обмоток в осевом направлении на равные расстояния, а электронный блок содержит логический коммутатор, на входы которого подключены второй выход схемы управления и выходные обмотки первичного датчика, а выход соединен со вторым входом схемы измерения. 2. Преобразователь по п.1, о т л и ч а ю щ и й с я тем, что в первичном датчике осевая длина L магнитопровода, не имеющего пазов и обмоток на сопрягаемой цилиндрической поверхности, принимается по результатам расчета по формуле где п - число поперечных выступов, охватываемых одной секций выходной обмотки, а и b - ширина соответственно поперечного выступа и поперечного паза, измеренная в направлении, параллельном образующим цилиндрической поверхности, при этом поперечные пазы выполнены под углом 90° к продольным пазам. 3. Преобразователь по п.1, о т л и чающийся тем, что в первичном датчике поперечные пазы по отношению к продольным пазам выполняют под углом ф, определяемым по формуле nd Ф = arctg 2 n ( a + Ь ) , о о 27045 4. Преобразователь по пп.2 и 3, о тл и ч а ю щ и й с я тем, что в первичном датчике вместо одного магнитопроводящего элемента без пазов, применено два или больше идентичных магнитопроводящих элементов, при этом расстояние между их серединами устанавливается равным или кратным 2n(a+b), или отличается от этого расстояния на величину не более, чем £ (а+Ь). 5. Преобразователь по пп.2 и 3, о тл и ч а ю щ и й с я тем, что в первичном датчике дополнительно применена одна или несколько выходных обмоток грубого отсчета, состоящих из ряда катушек, среди которых имеются занимающие в осевом направлении длину, равную или превышающую половину диапазона перемещения одного магнитопроводящего элемента относительно другого, при этом электронный блок содержит дополнительно схему согласования грубого и точного отсчетов, вход которой соединен с выходом схемы измерения, а выход соединен со входом регистра, и логический коммутатор содержит дополнительные входы, на которые включены выходные обмотки грубого отсчета. Изобретение относится к устройствам автоматического контроля и регулирования и может быть применено в станкостроении, робототехнике и в других отраслях. Известны преобразователи линейных перемещений [1], состоящие из электронного блока и первичного датчика. Электронный блок содержит схему измерения выходного сигнала первичного датчика и регистр, с выхода которого выдается выходной сигнал в цифровом коде. Первичный датчик содержит два магнитопроводящих элемента - цилиндрическую линейку и сигнальную головку в виде втулки, коаксиально охватывающей цилиндрическую линейку. На одном из магнитопроводящих элементов, например на цилиндрической линейке, выполнены два продольных диаметрально расположенных паза и пересекающий их ряд поперечных пазов, разделяющих цилиндрическую поверхность вдоль оси на ряд поперечных выступов. В продольных пазах уложена обмотка возбуждения, на которую подается переменное напряжение, а в поперечных пазах - выходная обмотка, отдельные секции которой охватывают по одному поперечному выступа и соединены последовательно встречно. При осевом перемещении сигнальной головки относительно цилиндрической линейки в выходной обмотке индуцируется и подается на схему измерения электронного блока сигнал, амплитуда которого является периодической функцией линейного перемещения сигнальной головки. Недостатком такого преобразователя является низкая точность преобразования выходного сигнала в цифровой код из-за наличия двух зон нечувствительности в пределах периода изменения выходной ЭДС. Это обусловлено выбором осевом длины сигнальной головки, равной шагу измерительной обмотки. Известны также преобразователи [2], у которых первичный датчик имеет измененную сигнальную головку, осевая длина которой равна ЗІ, где I - ширина поперечного выступа в осевом направлении, равная ширине поперечного паза. В таких преобразователях точность преобразования выходного сигнала повышена, гак как в выходной функции первичного датчика не содержатся зоны нечувствительности в пределах периода ее изменения. Однако такому преобразователю также присущи следующие недостатки: неоднозначность определения величины линейного перемещения в пределах полупериода, так как любому положению сигнальной головки в пределах одной четверти периода соответствует положение головки в другой четверти периода, в которых выходные ЭДС равны (эти точки расположены симметрично относительно точки с максимальной величиной ЭДС); где d - диаметр цилиндрической поверхности, в которой выполнены пазы, а осевая длина L магнитопровода, не имеющего пазов и обмоток, определяется по формуле L = n(a+b). 5 10 15 20 25 30 27045 потеря информации о линейном положении в случае перерыва питания преобразователя; недостаточная точность преобразования из-за наличия высших гармоник в выходной функции первичного датчика; малая величина выходного сигнала первичного датчика; большая трудоемкость выполнения сложной выходной обмотки. Задачей изобретения является исключение неоднозначности определения величины линейного перемещения в пределах полупериода. Эта задача решается тем, что в поперечных пазах размещены две или больше идентичных выходных обмоток, секции которых охватывают два или более соседних поперечных выступов со смещением секций разных обмоток в осевом направлении на равные расстояния, а электронный блок содержит логический коммутатор, на входы которого подключены один £ыход схемы управления и выходные обмотки первичного датчика, а выход соединен со вторым входом схемы измерения. С целью повышения точности в первичном датчике осевая длина L магнитопровода, не имеющего пазов и обмоток на сопрягаемой цилиндрической поверхности, устанавливается по результатам расчета по формуле 5 10 15 20 25 30 где п - число поперечных выступов, охватываемых одной секций выходной об- 35 мотки; а и b - ширина соответственно поперечного выступа и поперечного паза, измеренная в направлении, параллельном образующим цилиндрической поверхнос- 40 ти; при этом поперечные пазы выполнены под углом 90° к продольным пазам. С целью уменьшения трудоемкости изготовления в первичном датчике попереч- 45 ные пазы по отношению к продольным пазам могут быть выполнены под углом Ф, определяемым по формуле Ф = arctg 7id 2 n ( a + Ь ) , 50 где d - диаметр цилиндрической поверхности, в которой выполнены пазы; а осевая длина L магнитопровода, не имеющего пазом и обмоток, определяет- 55 ся по формуле L = n(a-fb). С целью увеличения сигнала первичного датчика и повышения точности преобразователя в первичном датчике вместо 6 одного магнитопроводящего элемента без пазов, может быть применено два или больше идентичных магнитопроводящих элементов, при этом расстояние между их серединами устанавливается равным или кратным 2n(a+b), или может отличаться от него на величину не более, чем на п (а+Ь). С целью исключения потери информации о линейном положении в случае перерыва питания, в первичном датчике дополнительно может быть применена одна или несколько обмоток грубого отсчета, состоящих из ряда катушек, среди которых имеются занимающие в осевом направлении длину, равную или превышающую половину диапазона перемещения одного магнитопроводящего элемента относительно другого, при этом электронный блок содержит дополнительно схему согласования грубого и точного отсчетов, вход которой соединен с выходом схемы измерения, а выход соединен со входом регистра, и логический коммутатор содержит дополнительные входы, на которые включены выходные обмотки грубого отсчета. На фиг. 1 и 5 показаны варианты конструктивного исполнения первичного датчика; на фиг.2, 4 и 6 - варианты выполнения схем выходных обмоток; на фиг.З и 7 - функциональные схемы преобразователей линейного перемещения. Преобразователь состоит из первичного датчика и электронного блока. Первичный датчик (фиг.1) содержит магнитопроводящие цилиндрическую линейку 1 и расположенную соосно с ней с равномерным воздушным зазором сигнальную головку 2 в виде втулки. Для линейного перемещения одного магнитопровода относительно другого с сохранением равномерного воздушного зазора между сопрягаемыми цилиндрическими поверхностями, могут применяться направляющие конструктивные элементы. Например, цилиндрическая линейка может быть защиЩена от повреждений тонкостенной немагнитной трубкой, по которой со скольжением может перемещаться в осевом направлении одна или две немагнитные втулки из материала с малым коэффициентом трения. Эти втулки механически соединяются с сигнальной-головкой. Для упрощения изображения эти элементы на фиг.1 не показаны. Обмотка возбуждения, выходные обмотки и пазы для них могут быть расположены или на цилиндричес 27045 кой линейке, ил на сигнальной головке при определенном соотношении их осевых длин. В рассматриваемом примере приведен вариант расположения пазов и обмоток на цилиндрической линейке при относительно малой длине сигнальной головки. Такая конструкция предпочтительна для применения в системах, где объект линейного перемещения механически сочленен с сигнальной головкой, а неподвижной является цилиндрическая линейка, что не требует применения скользящих контактов или гибких токоподводов для подключения выводов обмоток к схеме электронного блока. На поверхности цилиндрической линейки 1 выполнены два диаметрально расположенных продольных паза 3 и 4 и под углом 90° к ним ряд поперечных пазов 5. Поперечные пазы разделяют поверхность цилиндрической линейки 1 в осевом направлении на ряд поперечных выступов 6. Ширина поперечных и продольных пазов выбирается минимальной из условия размещения в них заданного количества витков обмоток. Для упрощения обмогки на фиг.1 показаны только на поперечном сечении А-А. В продольных пазах 3 и 4 параллельно образующим цилиндрической поверхности расположены витки двухполюсной обмотки 7. Витки обмотки 7 имеют направление укладки в одну сторону по одному пазу и в противоположную сторону - по второму пазу, что условно показано точкой и крестиком на поперечном сечении А-А фиг.1. Осью данной обмотки является линия 8. В поперечных пазах расположена входная обмотка 9, состоящая из четного числа секций включенных последовательно встречно. Число поперечных выступов п, охватываемых одной секцией обмотки 9, должно быть не менее 2. Осевую длину магнитопроводящего элемента без пазов (в рассматриваемом примере - сигнальной головки) следует выбирать на основании расчета по формуле L = na + (n+1)b, где а и b - ширина соответственно поперечного выступа и поперечного паза, измеренная в направлении, параллельном образующим цилиндрической поверхности. В рассматриваемом примере число поперечных выступов п, охватываемых одной секцией выходной обмотки 9, принято равным п=2. Схема укладки такой обмотки на примере линейки с девятью поперечными выступами приведена на фиг.2, где поверхность цилиндрической линейки условно разрезана вдоль по середине продольного паза 4, развернута и спроекти 5 10 15 20 25 30 35 40 8 рована на плоскость. При этом для наглядности контуры пазов изображены пунктирными линиями, а обмотка 9 в виде одного проводника выделена сплошной линией со стрелками, условно указывающими направление его укладки. Данная схема является одним из вариантов - возможны и другие последовательности переходов из продольных пазов 3 и 4 в поперечные пазы 5, но при этом должны сохраняться указанные на схеме направления укладки проводника в поперечных пазах. Обмотка 9 образует вдоль цилиндрической линейки охваченные секциями участки, каждый из которых включает в себя два соседних поперечных выступа. В правильно уложенной обмотке на каждой половине линейки, разделенной продольными пазами, при переходе вдоль цилиндрической линейки из одного поперечного паза, в котором лежат проводники одной из выходных обмоток, в следующий поперечный паз, в котором лежат проводники той же обмотки, направления укладки проводников должны меняться на противоположные. У таких обмоток величина равная р = n(a+b), является полюсным делением. В середине каждого участка, охваченного секцией, имеется один поперечный паз, свободный от проводников обмотки 9. В этих пазах дополнительно уложена аналогичная выходная обмотка (для упрощения изображений на фиг.1 и 2 не показана). Каждая секция второй выходной обмотки также охватывает чередующиеся разноименных участки, состоящие из двух соседних поперечных выступов. Секции обеих выходных обмоток смещены друг относительно друга в осевом направлении (вдоль цилиндрической линейки) на одинаковую величину, рав ную - (а+b), то есть на 1/2 полюсного 45 деления. Выводные концы обеих выходных обмоток 9 и 10 (см. фиг.З) подключены ко входу логического коммутатора 11 в электронном блоке. Выход логического коммутатора 11 соединен со входом 50 схемы измерения 12, выходы которой соединены со входом регистра 13. Схема управления 14 своими выходами соединена с управляющими входами логического коммутатора 11 и схемы измерения 12. 55 В рассмотренной конструкции преобразователя первичный датчик может иметь некоторые конструктивные особенности и отличия. Например: число п поперечных пазов, охватываемых одной секцией выходных обмоток, 27045 10 может быть больше 2 и при этом может речных пазов винтовыми осевая длина L магнитопровода без пазов определяется быть увеличено количество выходных обформулой моток; L = n(a+b). продольные и поперечные пазы в цилиндрической линейке могут быть выпол- 5 нены не на сплошном магнитопроводе, Преобразователи рассмотренных как изображено на фиг.1, а получены в конструкций могут иметь в первичном датсборной конструкции, в которой короткие чике не один, а несколько магнитопровошайбообразные магнитопроводы поперечдящих элементов без пазов. В качестве ных выступов с двумя продольными паза- 10 примера на продольном сечении фиг.1 в ми набираются в линейку, чередуясь с качестве такого элемента пунктиром изобнемагнитными дистанционными шайбами, ражена еще одна сигнальная головка 15, создающими поперечные пазы. идентичная сигнальной головке 2. Эти гоВ первичном датчике преобразователовки соединены между собой механиле поперечные пазы могут быть выполне- 15 чески на расстоянии между их серединаны по отношению к продольным пазам не ми равном или кратном двойному полюспод углом 90°, а под углом (р, величина ному делению 2р = 2п(а-Нэ). При наличии которого определяется по формуле в выходных сигналах высших гармонических составляющих, возможно подавление тс d 20 некоторых из них. Для этого расстояние Ф = arctg между серединами двух магнитопроводяЬ ) , щих элементов уменьшают или увеличигде d - диамегр цилиндрической поверхр ности, в которой выполнены пазы. вают на величину —, где v - порядок v При указанных условиях поперечные 25 выступы становятся винтовыми, отделенподавляемой гармоники. ными друг от друга винтовыми пазами с Для подавления не одной, а напричислом заходов равным 2п. При укладке мер, двух гармонических составляющих выходной обмотки в такие пазы, исклюпорядков v, и v2, применяют две пары магчаются переходы проводников по участ- 30 нитопроводящих элементов без пазов. кам продольных пазов на всей длине магРасстояние между элементами в каждой нитопровода. Эти переходы могут сохраняться только на конечных участках. Техпаре изменяют на величину а рас нологически такие обмотки проще и менее трудоемки по сравнению с обмотка- 35 стояние между этими парами изменяют ми, приведенными на фиг.2. Для данных Р обмоток обязательно выполнение следуюна величину тг. 2 щего условия: числа проводников, их длина и направления укладки на участки винВозможно также применение изобратовых пазов, расположенных по разные 40 женной на фиг.5 конструкции первичного стороны от продольных пазов 3 и 4, долждатчика, у которого поперечные 5 и проны быть равны. На фиг.4 дана развертка дольные 3 и 4 пазы с обмотками расположены на сигнальной головке 2. Попемагнитопровода с примером укладки одречные пазы выполнены под углом 90° к ной выходной обмотки 9. Для наглядности пунктиром изображены два диамет- 45 продольным пазам. Выходные обмотки (для рально расположенных продольных паза упрощения изображена только одна из 3 и 4 и только те поперечные винтовые них - обмотка 9) с числом поперечных пазы, в которые уложена данная обмотвыступов, охватываемых одной секций п=2, имеют только по две секции. Обмотка возка. Она показана в виде одного проводника, выделенного сплошной линией со 50 буждения 7 расположена в продольных стрелками, условно указывающими наппазах 3 и 4. равление укладки. В преобразователь с диапазоном линейного перемещения, не превышающим Между изображенными на фиг.4 повеличину полюсного деления, на цилиндперечными пазами расположены остальные винтовые пазы (для* упрощения изоб- 55 рической линейке 1 может располагаться один магнитопроводящий элемент 16, осеражения - не показаны), в которые анавая длина которого равна L = па + (п+1)Ь. логичным образом уложены проводники Если диапазон больше, тогда на цилиндпо крайней мере еще одной аналогичной рической линейке, как показано на фиг.5, выходной обмотки. При выполнении поперасполагается несколько таких магнитолV 11 27045 роводящих элементов без пазов на расстоянии между серединами соседних элементов равном 2р = 2n(a+b). Если диапазон линейного перемещения одного магнитопроводящего элемента относительно другого большой и превышает величину двойного полюсного деления 2р у выходных обмоток, последние становятся обмотками точного отсчета. В этом случае в поперечных пазах дополнительно размещают одну или больше выходных обмоток грубого отсчета, имеющих величину двойного полюсного деления 2рг, равную или несколько больше рабочего диапазона перемещения одного магнитопроводящего элемента относительно другого. На фиг.6 показана в качестве примера развертка цилиндрической линейки с четырехзаходными винтовыми пазами, пересекающими продольные пазы 3 и 4 под некоторым углом, не равным 90°. Контуры пазов изображены пунктирной линией, для упрощения обмотка возбуждения и выходные обмотки точного отс-. чета, уложенные по принципу фиг.4, не показаны. На одной из половин цилиндрической линейки, разделенной продольными пазами и расположенной на развертке выше продольного паза 3, размещена обмотка 17 грубого отсчета. Для данной обмотки число поперечных выступов, приходящихся на одно полюсное деление, равно пг = 6. В пределах каждого полюсного деления обмотки 17 расположено по три концентрических катушки. Суммарная длина, занимаемая в осевом направлении двумя наибольшими катушками обмотки 17, определяет диапазон линейного перемещения. Направление укладки проводников обмотки 17 условно показано стрелками на сплошных линиях, обозначающих концентрические катушки. Двумя осями обмотки 17 являются обозначенные штрихпунктирными линиями 18 и 19 середины поперечных выступов, расположенных между парами поперечных пазов 20, 21 и 22, 23. Расстояние между осями равно полюсному делению грубого отсчета р г * пДа+b). Числа проводников в концентрических катушках наиболее целесообразно принимать пропорциональными синусной функции, аргумент которой определяется отношением ширины катушки к ширине полюсного деления. Такие обмотки имеют формальное сходство с известными из теории электрических машин синусоидально-распределенными обмотками [3]. Возможно заимствование из электрических машин и других, более простых типов обмоток, например, двухс 12 лойных распределенных обмоток с укороченным шагом [3]. На второй половине цилиндрической линейки, изображенной на развертке ниже продольного паза 3, раз5 мещена вторая выходная обмотка 24 грубого отсчета. Она выполнена аналогично, но со сдвигом осей относительно обмот10 15 20 25 30 35 40 45 50 55 ки 17 на величину -= = nr(a+b). Одной осью 25 обмотки 24 является середина поперечного выступа, расположенного между парой пазов 26 и 27. Все три катушки, концентрически расположенные вокруг оси 25, составляют половину обмотки 24. По обе стороны от • руппы этих катушек расположены разделенные на две части укороченные катушки второй половины обмотки 24. Приведенные схемы укладки обмоток грубого отсчета не являются единственными, возможны, например варианты размещения катушек каждой из обмоток на обеих частях цилиндрической линейки, расположенных как выше, так и ниже продольного паза 3 на развертке фиг.6. Сохраняется принцип построения схем обмоток и в том случае, когда поперечные пазы выполнены под углом 90° к продольным пазам. Число обмоток грубого отсчета также может отличаться от приведенного в примере. Возможны схемы укладки с пропуском части пазов, и не с синусным, а с линейным законом распределения числа проводников по пазам В рассматриваемом примере первичного датчика с обмотками точного и грубого отсчетов электронный блок преобразователя (фиг.7) в логическом коммутаторе 11 содержит дополнительные входы для подключения выводов обмоток 17 и 24 грубого отсчета и содержит схемы согласования 28 грубого и точного отсчетов, на вход которой подключены выходы схемы измерения 12. Выходы схемы согласования 28 соединены со входом регистра 13. В рассматриваемых вариантах исполнения первичный датчик может иметь некоторые конструктивные особенности. Например, магнитопроводящие элементы с пазами - или цилиндрическая линейка или сигнальная головка - могут быть сборными, имея продольные разрезы. Отдельные их фрагменты могут собираться в целое встык в месте соединения или с некоторым промежутком. Такая конструкция может оказаться технологичнее, облегчит укладку обмоток в пазы. Рассмотрим работу преобразователе на примере конструкции, приведенной на 13 27045 фиг.1, 2 и 3, при условии, когда диапазон линейного перемещения не превышает 2р. На обмотку 7, являющуюся обмоткой возбуждения первичного датчика, подает- 5 ся переменное напряжение U, которое при начальном фазовом сдвиге равном нулю, опишется формулой U = Umsin(2Kft), to где U m - амплитудное значение напряжения; f - частота питающего напряжения; t - текущее время. Протекающий по обмотке 7 ток создает вокруг цилиндрической линейки пе- 15 ременное магнитное поле. Осью магнитного потока будет линия 8. При этом в проводниках выходных обмоток 9 и 10, содержащих четное число соединительных последовательно встречно секций, бу- 20 дут наводиться ЭДС, результирующие величины которых при отсутствии сигнальной головки 2 будут равны нулю. При наличии сигнальной головки, пренебрегая потоками рассеяния по воздуху, можно 25 считать, что весь магнитный поток проходит в зоне перекрытия поверхностей, образующих воздушный зазор между цилиндрической линейкой 1 и сигнальной головкой 2. В этом случае магнитный поток 30 проходит внутри цилиндрической линейки 1 (см. фиг.1) вдоль оси 8 обмотки возбуждения 7 и через воздушный зазор входит в сигнальную головку 2, где разветвляется на две части, обходит по магни- 35 топроводу головки и через воздушный зазор с противоположной стороны по направлению оси 8 возвращается в цилиндрическую линейку. При прохождении магнитного потока по указанному пути в вы- 40 ходных обмотках 9 и 10 наводятся переменные ЭДС. Амплитуды этих ЭДС являются функциями линейного перемещения сигнальной головки 2 вдоль цилинд• рической линейки 1. Если сигнальная го- 45 ловка перекроет всю площадь, охваченную какой-либо секций, ЭДС соответствующей обмотки будет максимальной. При сдвиге сигнальной головки с этого положения площадь, перекрываемая головкой 50 в пределах данной секции, начнет уменьшаться и будут нарастать площадь перекрытия в соседней секции. В результате ЭДС будет уменьшаться, а при достижении равенства перекрываемых площадей 55 двух соседних секций станет равной нулю. При дальнейшем перемещении сигнальной головки амплитуда ЭДС начнет возрастать с изменением фазы на 180 электрических градусов. Величина ЭДС и 14 ее фаза при изменении координаты X будут периодически повторяться через промежутки равные 2п(а+Ь). Так как обе выходные обмотки 9 и 10 размещены на цилиндрической линейке со сдвигом на величину — (а+Ь), следовательно и зависимости из ЭДС от координаты X также будут смещены на эту величину. Такая зависимость с определенной степенью точности может быть описана следующими синусной и косинусной функциями: Ua = UK sin [ (X + ІНМ; (2) Ub = UK cos [ ~ (X + IJJ, (3) где Ua, Ub - амплитуды ЭДС в обмотках 9 и 10; U - напряжение возбуждения, изменяющееся во времени в соответствии с формулой (1); К - конструктивный коэффициент пропорциональности; р - полюсное деление, определяемо^ зависимостью р = п(а+Ь); X - координата линейного перемещения сигнальной головки; Ін - начальный сдвиг по координате X, зависящий от выбора начального положения сигнальной головки. Выходные сигналы с обмоток 9 и 10 поступают в электронный блок (фиг.З) на вход логического коммутатора 11, в котором они по сигналу со схемы управления 14 сравниваются по фазе между собой и с опорным напряжением U. В качестве опорного напряжения используется изменяющееся по формуле (1) напряжение, подаваемое на обмотку возбуждения 7 первичного датчика. В результате сравнения сигналов по фазе определяется квадрант синусно-косинусных функций (2) и (3) в зависимости от линейного положения X сигнальной головки 2. Этой логической операций определяется порядок и полярность коммутации выходных сигналов первичного датчика для их передачи на обработку в схему измерения 12. По сигналу схемы управления 14 в схеме измерения 12 по результатам обработки поступивших из логического коммутатора 11 сигналов формируется цифровой код, который передается в регистр 13 для выдачи его внешним пользователем. Наличие двух выходных обмоток 9 и 10 в сочетании с логическим коммутатором 11 обеспечивает выдачу однозначно 15 27045 16 обмотку возбуждения 7 подается перего цифрового кода N без неопределенменное напряжение в соответствии с форности в пределах полупериода выходного мулой (1). При этом, в зависимости от сигнала первичного датчика. положения сигнальной головки с обмоток Преобразование линейного перемещения X в цифровой код N, производится по 5 9 и 10 точного отсчета в электронный этому же принципу, если первичный датблок подаются и обрабатываются сигначик имеет конструктивный вариант с винлы, как было описано в предыдущих консттовыми пазами и выходными обмотками, руктивных вариантах преобразователя. Одуложенными согласно фиг.4, или с расновременно, с обмоток 17 и 24 также положением обмоток на сигнальной го- 10 подаются на вход логического коммутатоловке согласно фиг.5, или с применера 11 сигналы, имеющие следующую занием нескольких магнитопроводных элевисимость от координаты линейного пементов без пазов 16, как показано на ремещения сигнальной головки: фиг.5, или со второй сигнальной головкой 15 согласно фиг.1. 15 U a r = UKr sm[ (4) (Х+ІГ)П Особенностями работы этих преобразователей является некоторое снижение уровня выходных сигналов у датчиков с U b r = UKr cos[ (X+lr)J, (5) винтовыми пазами, а при применении нескольких сигнальных головок выходные сиг- 20 где Кг - конструктивный коэффициент проналы увеличиваются пропорционально чиспорциональности для обмоток грубого отслу этих элементов, если расстояние межчета; ду их серединами равно двойному полюср г - полюсное деление обмоток груному делению 2р, или увеличиваются в бого отсчета; пределах от J2 до 2 раз, если расстоя- 25 l r - начальный сдвиг по координате, ние между парой элементов изменено на зависящий от выбора начального положения сигнальной головки грубого отсчевеличину —. Два магнитопроводящих элета. В логическом коммутаторе 11 и в схемента без пазов с измененным на вели- 30 ме измерения 12 сигналы обмоток грубого отсчета обрабатываются аналогично расстоянием между ними создачину сигналам точного отсчета. Сформированные в схеме измерения 12 отдельно коды дут в выходных обмотках суммирующиеся точного и грубого отсчетов обрабатываютсигналы, у которых гармоники v-ro по- 35 ся в схеме согласования отсчетов 28 и рядка будут в противофазе и поэтому передаются в регистр 13. скомпенсируются. Применение двух пар Так как период изменения сигналов таких элементов с изменением расстояпо формулам (4) и (5) составляет 2р г , что соответствует диапазону изменения кооробеспении между ними на динаты X, то при обработке кодов грубого и точного отсчетов в схеме согласования чивает компенсацию двух гармоник v^ro 28 исключается неоднозначность выходи v2-ro порядков. В преобразователе возного кода N при переходе сигнальной можно также применение первичного датчика по обращенной схеме - с использо- 45 головки с одного периода точного отсчета на другой. В таком преобразователе даже ванием двух обмоток, уложенных в попепосле перерыва питания полностью воссречные пазы для возбуждения двухфазтанавливается информация о линейном пеным напряжением, а уложенную в проремещении X объекта, связанного с сигдольные пазы - в качестве выходной обмотки, в которой фаза ЭДС будут функ- 50 нальной головкой. цией координаты X. Если первичный датчик Если в грубом отсчете первичного датсодержит более двух выходных обмоток, чика применена только одна выходная обформирование выходного кода N схемой мотка с линейной зависимостью выходноизмерения 11 производится не по квадранго сигнала от координаты X, тогда в схетам, а в более узком диапазоне, что поз- 55 ме измерения 12 при формировании кода воляет повысить точность преобразователя. сигнал грубого отсчета сравнивается с При работе описанного по фиг.6 и 7 опорным напряжением U, в качестве копреобразователя с грубым и точным отсторого используется напряжение возбужчетами в первичном датчике на общую дения первичного датчика. •2'зпф _-x_J_JL\L-_L±_ і—гт—or гт—і т—і\7і—тпг IV тшт *тт* —• J *• !• і « м J..w і і І • «м^ _ ^ . ІІ 1 J _ 4HH_RJ Y-Y ! 27045 Фиг. 4 27045 Фиг. 6 13 и Фиг.7 Упорядник Техред М. Келемеш Коректор М. Куль Замовлення 549 Тираж Підписне Державне патентне відомство України, 254655, ГСП, Київ-53, Львівська пл., 8 Відкрите акціонерне товариство "Патент", м. Ужгород, вул. Гагаріна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюTransformer of linear displacement
Автори англійськоюYuzvinkevych Valentyn Vsevolodovych, Vynohradov Mykailo Yuriiovych, Okhota Anatolii Hryhorovych, Tereschenko Stanislav Vasyliovych
Назва патенту російськоюПреобразователь линейного перемещения
Автори російськоюЮзвинкевич Валентин Всеволодович, Виноградов Михаил Юрьевич, Охота Анатолий Григорьевич, Терещенко Станислав Васильевич
МПК / Мітки
МПК: G01B 7/00
Мітки: перетворювач, лінійного, переміщення
Код посилання
<a href="https://ua.patents.su/12-27045-peretvoryuvach-linijjnogo-peremishhennya.html" target="_blank" rel="follow" title="База патентів України">Перетворювач лінійного переміщення</a>
Перетворювач лінійного переміщення
Номер патенту: 27044
Опубліковано: 28.02.2000
Автори: Юзвинкевич Валентин Всеволодович, Терещенко Станіслав Васильович, Віноградов Михайло Юрійович, Охота Анатолій Григорович
МПК: G01B 21/00, G01B 7/14
Мітки: перетворювач, переміщення, лінійного
Формула / Реферат:
1. Преобразователь линейного перемещения, содержащий электронный блок со схемами измерения, управления и регистром, в которых один выход схемы управления соединен с одним из входов схемы измерения, а выход схемы измерения соединен со входом регистра, и первичный датчик, состоящий из выполненных из магнитопроводящего материала цилиндрической линейки и охватывающей ее соосно подвижной сигнальной головки в виде втулки, на сопрягаемых...
Перетворювач переміщення в фазу синусоїдного сигналу
Номер патенту: 1821
Опубліковано: 20.12.1994
Автор: Ярославцев Михайло Іванович
МПК: G01B 21/00
Мітки: синусоїдного, перетворювач, переміщення, сигналу, фазу
Формула / Реферат:
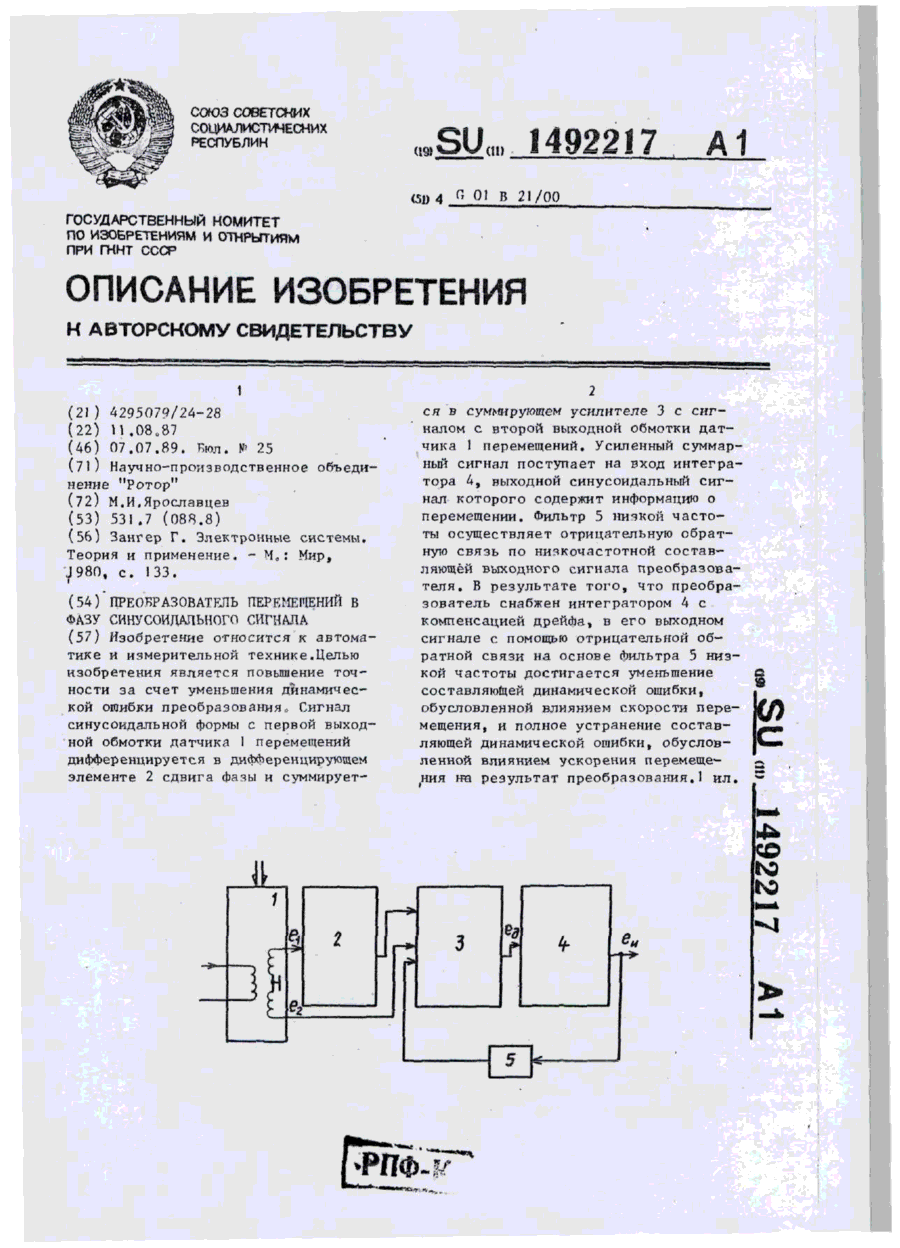
Преобразователь перемощений в фазу синусоидального сигнала, содержащий синусно-косинусный датчик перемещений, дифференцирующий элемент сдвига фазы, вход которого соединен с первым выходом синусно-косинусного датчика перемещений, и суммирующий усилитель, первый вход которого соединен с выходом дифференцирующего элемента сдвига фазы, а второй вход — со вторым выходом синусно-косинусного датчика перемещений, отличающийся тем, что, с целью...
Перетворювач переміщення у послідовність імпульсів
Номер патенту: 5042
Опубліковано: 28.12.1994
Автори: Забішна Наталія Артемівна, Рубінштейн Григорій Маркович, Перельмутер Віктор Моісейович, Суходольський Сергій Олександрович
Мітки: імпульсів, послідовність, переміщення, перетворювач
Формула / Реферат:
Преобразователь перемещения в последовательность импульсов, содержащий n-фазный датчик перемещения, два n-разрядных регистра, шину синхронизации, выходы n-фазного датчика перемещения подключены к входам данных первого регистра, выходы которого подключены к входам данных второго регистра, шина синхронизации подключена к синхровходам первого и второго регистров, отличающийся тем, что, с целью повышения разрешающей способности, в него...
Перетворювач швидкості переміщення в код
Номер патенту: 3223
Опубліковано: 26.12.1994
Автори: Данілов Ніколай Алєксєєвіч, Брезе Євген Юрійович
МПК: H03M 1/50
Мітки: перетворювач, швидкості, код, переміщення
Формула / Реферат:
Преобразователь скорости перемещения в код, содержащий последовательно соединенные генератор импульсов, блок питания, фазовращатель, кинематический вход которого является входом преобразователя, и формировать фазовых импульсов, синхронизатор, первый вход которого соединен с выходом генератора импульсов, и счетчик, отличающийся тем, что в него введены регистр, формирователь прерываний и вычислитель, причем выход генератора импульсов соединен...
Перетворювач переміщення в код
Номер патенту: 18577
Опубліковано: 25.12.1997
Автори: Туманов Юрій Германович, Лунін Володимир Михайлович, Мірошніков Андрій Олександрович, Асалієв Ерзіман Мурадович, Рижков Олександр Володимирович
МПК: G01B 9/00, H03M 1/22, H03M 1/06, G01B 7/16
Мітки: код, перетворювач, переміщення
Формула / Реферат:
Преобразователь перемещения в код, содержащий оптически связанные между собой излучатель, модулятор, коллиматор и анализатор, генератор, выход которого соединен с управляющим входом модулятора, двигатель, связанный с анализатором, формирователь начала отсчета, оптически связанный с анализатором, последовательно соединенные усилитель, демодулятор и фильтр, анализатор выполнен в виде прозрачного диска радиусом с тремя активными участками,...
Попередній патент: Перетворювач лінійного переміщення
Наступний патент: Пружна монолітна ланка ланцюга
Випадковий патент: Пристрій для лиття вакуумним усмоктуванням тонкостінних виливків