Пристрій для тривимірного орієнтування об’єкта
Номер патенту: 27510
Опубліковано: 15.09.2000
Автори: Ваассен Вільгельм Марія Германус, Гроененбоом Альберт
Текст
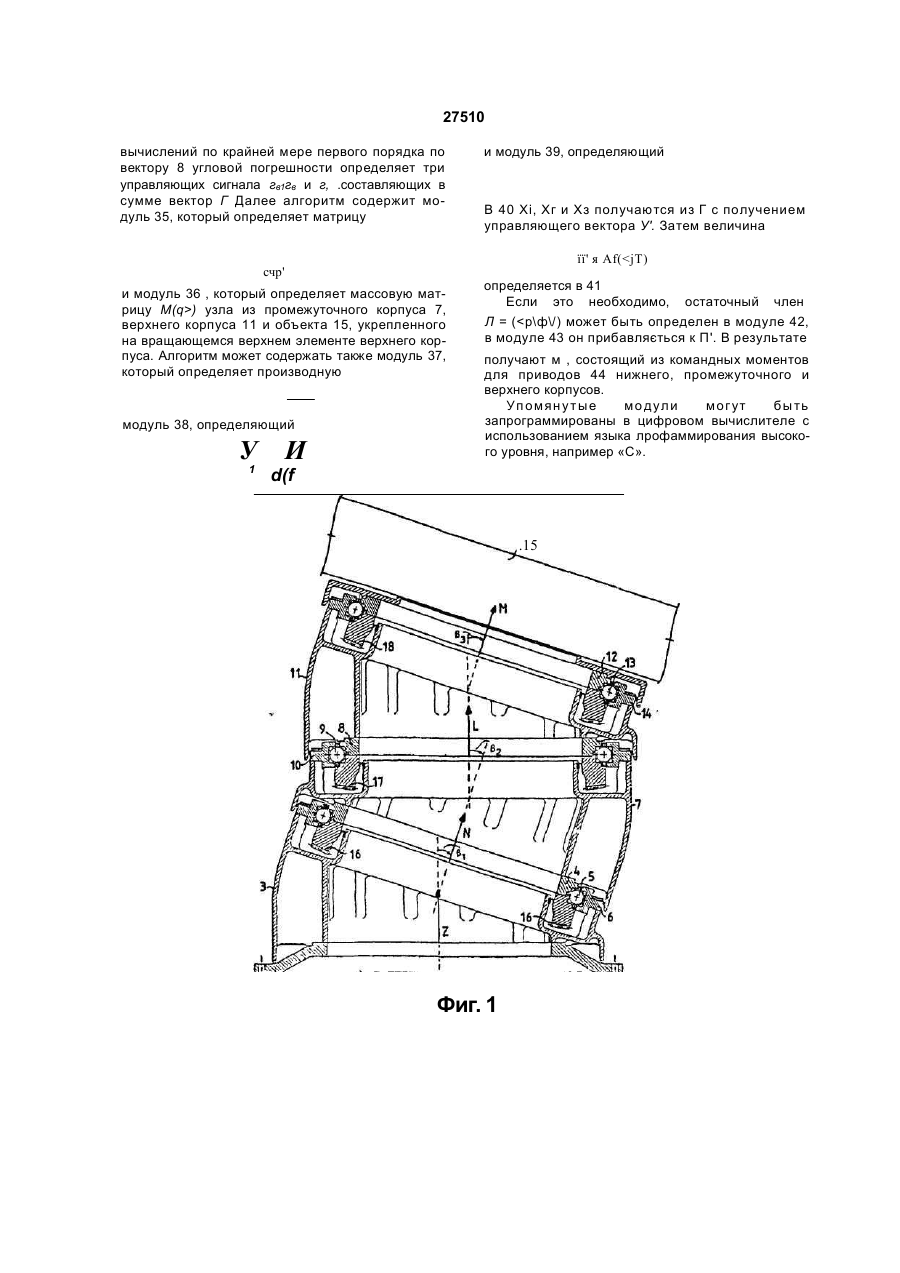
УКРАЇНА (19) UA 01,27510 (із, С2 (51, 6F16M11/12 МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ДЕРЖАВНИЙ ДЕПАРТАМЕНТ ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ ОПИС ДО ПАТЕНТУ НА ВИНАХІД (54, ПРИСТРІЙ ДЛЯ ТРИВИМІРНОГО ОРІЄНТУВАННЯ ОБ'ЄКТА (21,95038211 (22,03.09.1993 (24) 15.09.2000 (31, 9201609 (32,17.09.1992 (33, NL (86, РСТ/ЕР93/02377, 03.09.1993 (46,15.09.2000, Бюл. № 4, 2000 р. (72, Ваассен Вільгельм Марія Германус (NL), Гроененбоом Альберт (NL, (73, ХОЛЛАНДЗЕ СІГНААЛАППАРАТЕН Б.В. (NL, (56, ЕР 0155922, заявка кл. F 16 М 11/12, 1985. (57, 1. Устройство для трехмерного ориентирования объекта.устанавливаемого на первой плоскости устройства, относительно второй плоскости и для вращения объекта в первой плоскости, содержащее узел из трех корпусов с первой плоскостью, лежащей на верхней поверхности первого корпуса, и второй плоскостью, лежащей на нижней поверхности третьего корпуса, при этом второй корпус установлен с возможностью вращения вокруг оси N, образующей угол pi с нормалью Z ко второй плоскости, первый корпус установлен с возможностью вращения вокруг оси L, образующей угол Зг с осью N, и приводы, отличающееся тем, что каждый привод является индивидуальным приводом для соответствующего корпуса и предназначен для вращения элемента, образующего верхнюю поверхность корпуса, относительно элемента, образующего верхнюю поверхность корпуса, верхняя поверхность второго корпуса присоединена к нижней поверхности первого корпуса, верхняя поверхность третьего корпуса прикреплена к нижней поверхности второго корпуса, элемент, образующий верхнюю поверхность первого корпуса, установлен с возможностью вращения вокруг оси М, образующей угол Рз с L, углы Pi, Рг и рзне равны нулю, а первый корпус, второй корпус и третий корпус имеют в основном кольцеобразную форму. 2. Устройство по п.1, отличающееся тем, что оно снабжено индикаторами угла, которые приспособ лены для измерения углов поворота второго кор пуса, первого корпуса и элемента, образующего верхнюю поверхность первого корпуса. 3. Устройство по п.2, отличающееся тем, что каж дый индикатор угла содержит оптически коди руемый указатель угла. 4. Устройство по п.З, отличающееся тем, что ус тройство кодирования, например кодом Грея, ус тановлено на одном из корпусов совместно с ус тройством для считывания кода. 5. Устройство по л п. 2-4, отличающееся тем, что оно дополнительно снабжено средством уп равления, соединенным с индикаторами углов и двигателями, причем указанное средство управ ления приспособлено для управления первым и вторым двигателями для ориентирования пер вой плоскости относительно второй плоскости и для управления третьим двигателем с целью вращения объекта в первой плоскости, компен сируя таким образом возможные вращения, вы зываемые совместным вращением второго и третьего корпусов. 6. Устройство по п 5, отличающееся тем, что дви гатель привода каждого корпуса представляет со бой шаговый двигатель и имеет индикатор относи тельного положения 7 Устройство по п 5 или 6, отличающееся тем, что приводы дополнительно содержат первую, вторую и третью зубчатые передачи, приспособленные для привода второго и третьего корпусов, а также вращающегося элемента, образующего верхнюю поверхность третьего корпуса, соответственно. 8. Устройство по пп.5-7, отличающееся тем, что средство управления включает модуль для определения по вектору ф измеренного сигнала, вектору эталонного сигнала э и вектору ф положения поверхности вектора 8 угловой погрешности, состоящего из угловой погрешности 8а азимута, угловой погрешности 5в возвышения и угловой погрешности 5г крена между системой координат, связанной с объектом, и требуемой системой координат. 9. Устройство по п. 8, отличающееся тем, что средство управления дополнительно содержит модуль для определения вектора и сигнала при вода по вектору 5 угпоаой погрешности. 10. Устройство по п. 9, отличающееся тем, что век тор и сигнала привода определен передаточными функциями Hi, (s), Hi (s) и Нз (s) , по крайней мере, первого порядка по следующим соотношениям СМ О ю см 27510 = Я, (*)•».(*) где s - оператор Лапласа. 11 . Устройство по любому из вышеуказанных пунктов, отличающееся тем, что углы Pi, Рг и Рз в основном идентичны. Настоящее изобретение относится к устройствам для ориентирования объекта, установленного на первой плоскости по отношению ко второй плоскости и для вращения объекта в первой плоскости, оно содержит совокупность из трех, взаимосвязанных корпусов, которая с одной стороны соединена с верхней плоскостью и с другой стороны - со второй плоскостью, а также имеет три существенно непараллельных оси (вращения) и приводы для вращения по крайней мере части указанных корпусов. Устройство такого типа известно из ЕР-В 0155922. Этот патент относится к устройству для удержания опоры радарной антенны в горизонтальном положении и для вращения антенны в определенном азимутальном направлении. В известном устройстве объект вращается в первой плоскости с помощью четвертого корпуса, расположенного в центре устройства, причем указанный четвертый корпус приспособлен для обеспечения связи вращений в первой и второй плоскостях. Упомянутый четвертый корпус вместе со вспомогательными устройствами занимает центральную часть системы, что затрудняет проводку средств коммуникации, например кабелей и гибких волноводов внутри этого корпуса. Более того, это делает конструкцию в целом весьма сложной. Устройство согласно данному изобретению свободно от этих недостатков. Оно содержит систему из трех корпусов, имеющих в основном кольцевую форму, причем первая плоскость закреплена на верхней поверхности первого корпуса, верхняя поверхность второго корпуса закреплена на нижней поверхности первого корпуса, верхняя поверхность третьего корпуса прикреплена к нижней поверхности второго корпуса, а вторая плоскость закреплена на нижней поверхности третьего корпуса, причем каждый корпус снабжен индивидуальным приводом для вращения элемента, образующего верхнюю поверхность корпуса относительно его нижней поверхности, средство контроля предусмотрено для одновременного управления парой корпусов с целью ориентирования первой плоскости по отношению ко второй плоскости и для управления третьим корпусом с целью вращения объекта в первой плоскости и компенсации таким образом вращений, индуцированных упомянутой парой корпусов. Из FR-A 2562459 известна рука робота, в которой несколько идентичных кольцевидных корпусов используется для перемещения руки. В этом 12. Устройство по любому из вышеуказанных пун ктов, отличающееся тем, что первый, второй и третий корпуса в основном идентичны. 13. Устройство по любому из вышеуказанных пун ктов, отличающееся тем, что оно снабжено средством для предотвращения параллельности третьей оси вращения М и первой оси вращения N. 14. Устройство по п. 13, отличающееся тем, что устройство для предотвращения параллельности осей М и N содержит механические стопорные ус тройства. известном устройстве все корпуса смонтированы на одном корпусе и поэтому вращаются вместе с этим корпусом. Один из преимущественных вариантов данного изобретения характеризуется тем, что упомянутые корпуса в основном идентичны. Специальный вариант изобретения характеризуется тем, что оно снабжено приводом для каждого корпуса, каждый привод имеет двигатель, связанный со средством управления, зубчатую передачу и индикатор угла, подключенный к средству управления, причем указанный индикатор приспособлен для измерения угла поворота элемента, образующего верхнюю поверхность, от заданного положения по отношению к нижней поверхности (корпуса). . Наиболее предпочтительный вариант средства . управления характеризуется тем, что оно содержит модуль для определения по вектору Ф тест-сигнала, вектору & эталонного (опорного) сигнала и вектору Ч> положения палубы вектора 9 ег > которые были определены по отношению к известной системе координат Е, например, жестко связанной с землей Как показано на фиг.ЗА, вектор ё°: перпендикулярен нижней поверхности элемента 19, вектор ё'\ перпендикулярен плоскости чертежа. Ортогональная система Е1 привязана к плоскости верхнего среза 20, она состоит из векторов ё'х ,ё'} . ё1 z и определена по отношению к известной системе координат Е. Вектор ё'\ перпендикулярен к плоскости верхнего среза 20, вектор ё v параллелен вектору ё .. Оба вектора ё(\ и ё'у указывают в одном направлении от наблюдателя Оба вектора ё"х и ё'х расположены в одной плоскости - плоскости чертежа Ортогональная система Е2 привязана к верхней повер coscp, -sin(p( О* Sin(p, СО5ф( О О 0 1 (12) Аналогично изложенному система Е1 может быть выражена через систему Е°: cosP 0 sin ( О 1 О - sin Р 0 cos | (із) следовательно, (14) Если рассматривать комплекс из трех корпу сов, то, основываясь на изложенном, путем после довательного применения роторных матриц, мож но ортогональную систему Еь, привязанную к вер хней поверхности вращающегося элемента вер хнего корпуса, выразить через ортогональную сис тему Ео, привязанную к нижней поверхности ниж него корпуса Эта взаимосвязь может быть пред ставлена следующим образом (15) Для того, чтобы определить углы погрешностей верхней плоскости вращающегося элемента верхнего корпуса и, следовательно, углы погрешностей объекта, укрепленного на этой поверхности, необходимо ввести понятие требуемой системы координат Ew. Это дает возможность определить углы погрешностей как углы азимута, возвышения и крена между системами координат, одна из которых требуемая, а другая привязана к верхней поверхности вращающегося элемента верхнего корпуса. Подобно изложенному выше требуемая система координат может быть выражена через Ео Также Ег может быть выражена через Е* 27510 £ = Э.А) (17) В результате выражение для углов погрешности принимает вид: ) М Это выражение сводится к системе из девяти взаимосвязанных уравнений с тремя неизвестными углами S,,, &. и б,. Так как правая часть выражения - это известная роторная матрица, возможно получить два комбинированных решения для углов погрешности 5(1, 5, и 5,. Как наиболее очевидно, следует выбрать такую комбинацию, которая в фиксированном начальном положении сводит величины угловых погрешностей к нулю. Очевидно, устройство по данному изобретению следует так устанавливать на палубе судна, чтобы система координат Ео, привязанная к нижней поверхности нижнего корпуса, совпала с так' называемой эталонной системой, зафиксированной на судне. Указанная эталонная система представляет особой систему «по часовой стрелке», привязанную к судну. Эта система служит эталонной для определения положения судна по углам азимута, возвышения и крена по отношению к системе координат, закрепленной на земле (т.е. системе «по часовой стрелке», ориентированной на север) На практике указанные углы, определяющие положение судна, измеряются с помощью гироскопов. Если использовать этот способ, то можно выражение для Еь упростить, введя в него судовые углы азимута, возвышения и крена. Если символами ХУ«» vl; t у ХУ, обозначить соответственно углы азимута, возвышения и крена, то: Выражение для требуемой системы координат по отношению к эталонной системе координат, связанной с землей, имеет вид: (20) a Ef может быть выражена через £w: І.Ф ІФ І) (21) В результате получена следующая формула для углов погрешностей. Ф.^ФО (22) Преимущество использования угловых координат судна по отношению к неподвижной системе координат состоит в том, что при этом появляется возможность придания вращающемуся элементу верхнего корпуса некоторой произвольной позиции, которая выражается через 9 , 9 , 9 по отношению к неподвижной системе координат, связанной с землей путем управления приводами, при таком управлении, которое практически сводит к нулю 5„, 5, и S,. Если устройство, выполненное согласно данному изобретению, используется для стабилизации радара на судне, причем этот радар должен совершать высокоравномерное вращение по отношению к неподвижной системе координат,&, = 9 = 0 и Э, « о>/. где f означает время, а со - угловую скорость по отношению к неподвижной системе координат. Возможно также, чтобы £° не совпадала с эталонной системой судна. В этом случае угловые погрешности могут быть рассчитаны способом, аналогичным приведенному выше, принимая во внимание ориентацию £° по отношению к эталонной системе судна. Полагая угловые погрешности равными нулю, из (22) можно получить выражения для треВ буемых величин ф,. Ф, '
ДивитисяДодаткова інформація
Назва патенту англійськоюAppliance for three-dimensional orientation of object
Автори англійськоюVaasen Vilhelm Maria Germanus, Groenenboom Albert
Назва патенту російськоюУстройство для трехмерного ориентирования объекта
Автори російськоюВаассен Вильгельм Мария Германус, Гроененбоом Альберт
МПК / Мітки
МПК: F16M 11/02
Мітки: орієнтування, об'єкта, тривимірного, пристрій
Код посилання
<a href="https://ua.patents.su/12-27510-pristrijj-dlya-trivimirnogo-oriehntuvannya-obehkta.html" target="_blank" rel="follow" title="База патентів України">Пристрій для тривимірного орієнтування об’єкта</a>
Пристрій для орієнтування антени у переносному пристрої зв’язку

Номер патенту: 25948
Опубліковано: 26.02.1999
Автор: Зейтц Мартін Віктор
Мітки: орієнтування, пристрої, пристрій, зв'язку, переносному, антени
Формула / Реферат:
1. Устройство для ориентирования антенны в переносном устройстве связи, содержащем динамик и микрофон, расположенные на его лицевой поверхности возле верхней и нижней поверхностей, соответственно, антенну, соединенную одним своим концом с переносным устройством связи посредством механизма поворота и выполненную с возможностью поворота по определенной траектории из сложенного положения в рабочее положение, отличающееся тем, что механизм...
Пристрій для орієнтування транспортного засобу, який підлягає розвантаженню
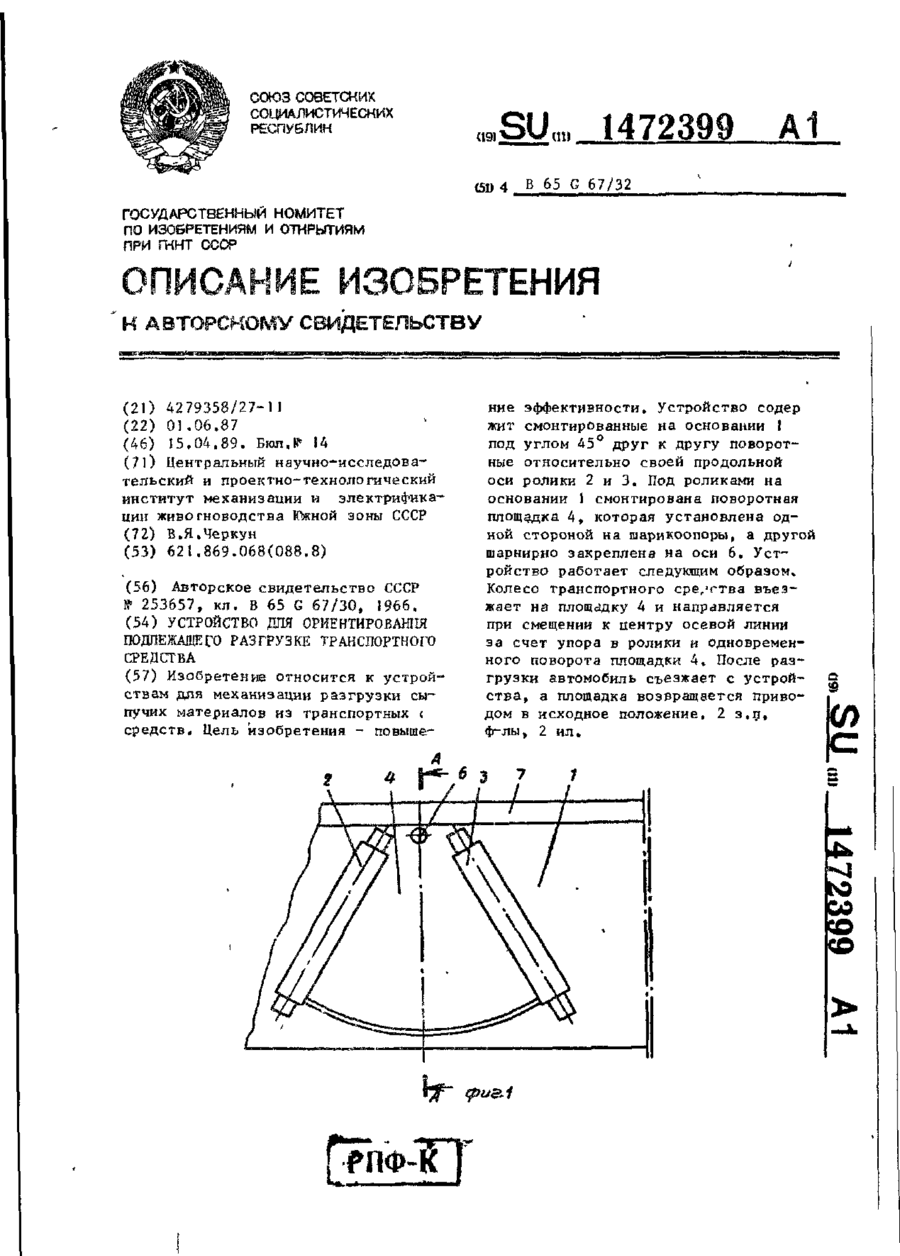
Номер патенту: 27178
Опубліковано: 15.08.2000
Автор: Черкун Валентин Якович
Мітки: орієнтування, розвантаженню, транспортного, підлягає, засобу, пристрій
Формула / Реферат:
1. Устройство для ориентирования подлежащего разгрузке транспортного средства, содержащее основание, на котором установлены по меньшей мере две направляющие для взаимодействия с колесом транспортного средства, отличающееся тем, что, с целью повышения эффективности, оно снабжено площадкой, поддерживаемой опорами качения, установленной с возможностью поворот относительно вертикальной оси на основании, а направляющие закреплены на площадке под...
Пристрій для опалення і вентиляції салону транспортного засобу
Номер патенту: 189
Опубліковано: 30.04.1993
Автори: Варивода Костянтин Михайлович, Губа Володимир Іванович, Гурлянд Арій Давидович, Спекторов Лев Григорович, Лимар Віктор Іванович, Стешенко Володимир Петрович
МПК: B60H 1/02
Мітки: транспортного, засобу, салону, пристрій, вентиляції, опалення
Формула / Реферат:
Формула изобретенияУстройство для отопления и вентиляции у 5 салона транспортного средства по авт. св №1150105, отличающееся тем, что, с целью упрощения конструкции, дополнительные заслонки выполнены одинаковыми, а оси второй и последующих дополнительных заслонок в направлении потока воздуха расположены со смещением, последовательно увеличивающимся относительно плоскости, параллельной входной поверхности теплообменника и проходящей...
Пристрій для очищення доріг від льоду та ущільненого снігу
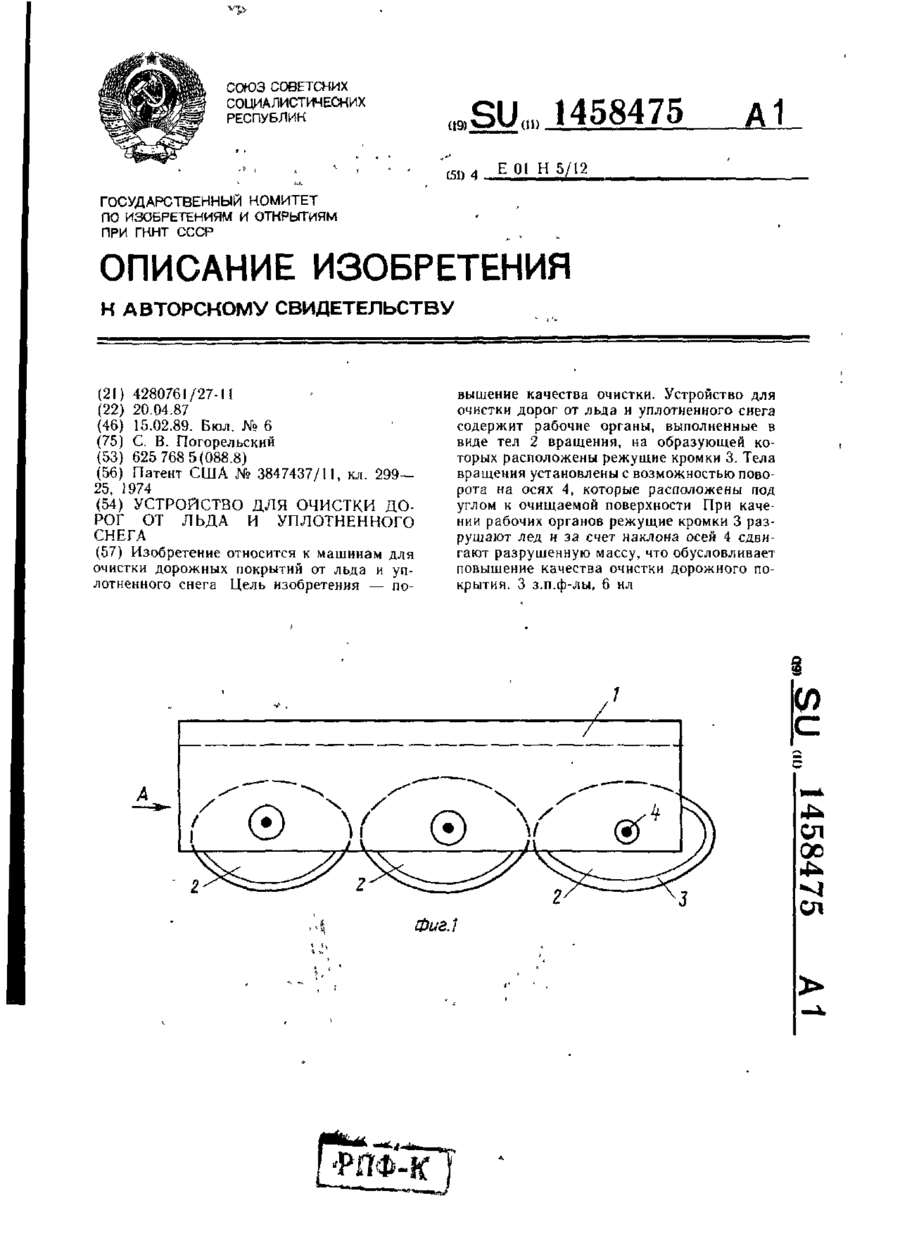
Номер патенту: 16800
Опубліковано: 29.08.1997
Автор: Погорельський Станіслав Володимирович
МПК: E01H 5/12
Мітки: очищення, снігу, пристрій, ущільненого, доріг, льоду
Формула / Реферат:
1. Устройство для очистки дорог от льда и уплотненного снега, содержащее рабочие органы, выполненные в виде тел вращения с режущей кромкой на образующей, установленных с возможностью поворота вокруг осей, лежащих в поперечной вертикальной плоскости, отличающееся тем, что, с целью повышения качества очистки, оси тел вращения расположены под углом к горизонтали.2. Устройство по п. 1, отличающееся тем, что тела вращения выполнены в виде...
Пристрій для виведення окалини
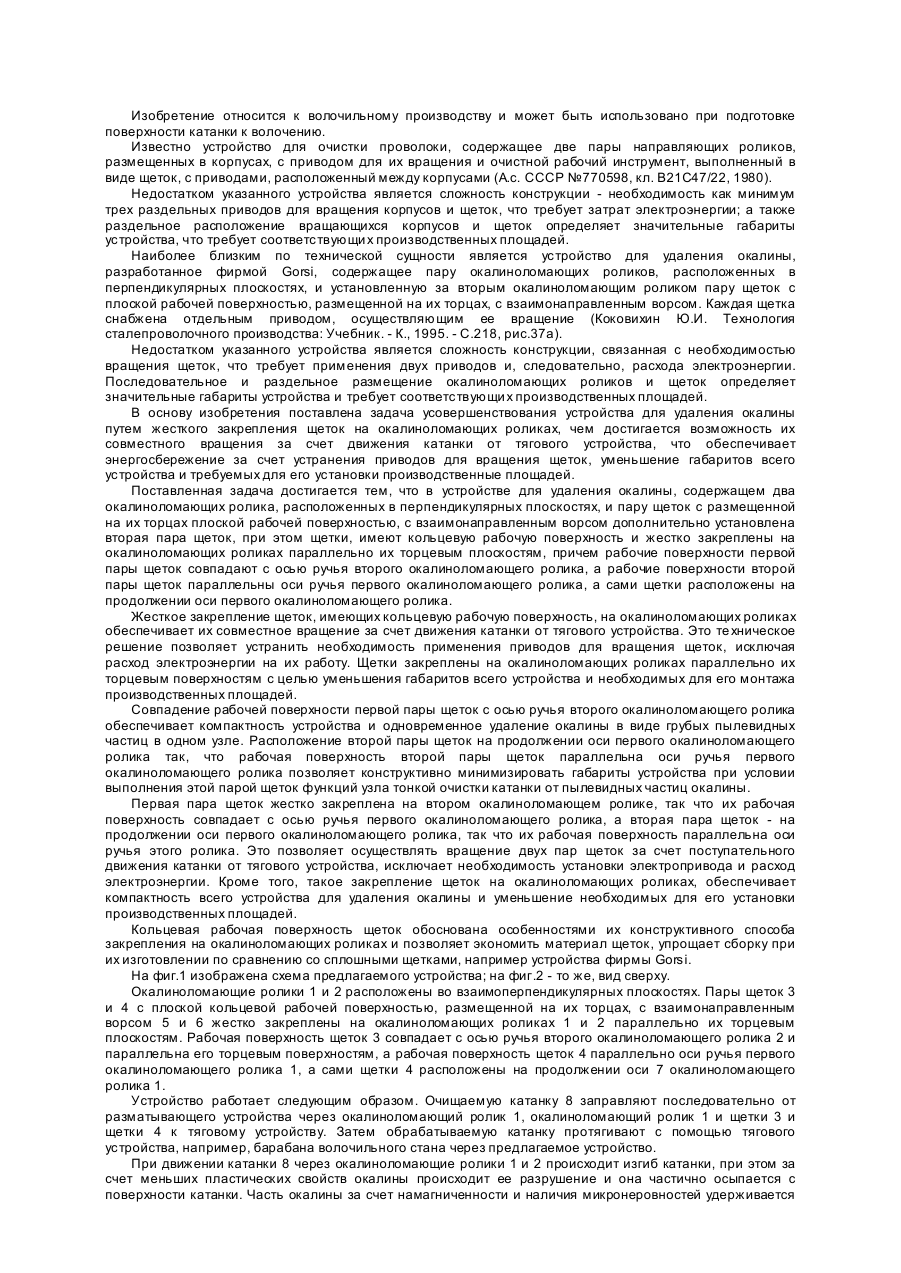
Номер патенту: 24263
Опубліковано: 07.07.1998
Автори: Федорів Анатолій Володимирович, Буравльов Ігор Борисович, Хміров Олег Володимирович, Коковіхін Юрій Іванович, Пінашина Валентина Олександрівна, Трухін Микола Олексійович, Максаков Анатолій Іванович
МПК: B21C 43/00
Мітки: окалини, пристрій, виведення
Формула / Реферат:
Устройство для удаления окалины, содержащее два окалиноломающих ролика, расположенных в перпендикулярных плоскостях, и пару щеток с размещенной на их торцах плоской рабочей поверхностью, с взаимонаправленным ворсом, отличающееся тем, что, оно дополнительно содержит расположенную на продолжении оси первого окалиноломающего ролика вторую пару щеток, при этом щетки, имеют кольцевую рабочую поверхность и жестко закреплены на окалиноломающих...
Попередній патент: Спосіб виготовлення целюлозного волокна та пристрій для виконання способу
Наступний патент: Роторна формуюча установка
Випадковий патент: Пристрій для спряження цвм з абонентами