Дозатор електронний “водограй”
Номер патенту: 41664
Опубліковано: 25.05.2009
Автори: Шостак Олександр Тихонович, Петелін Олексій Дмитрович, Матвієнко Микола Васильович, Мальченко Михайло Сергійович


Формула / Реферат
1. Дозатор електронний, що містить блок керування, маніпулятор та виконавчий пристрій, який змінює переріз еластичного трубопроводу, по якому рухається потік рідини, при цьому конструктивні елементи зазначенихблока керування, маніпулятора та виконавчого пристрою розміщені у відповідних корпусах, виконавчий пристрій містить електропривід та виконавчий механізм, виконавчий механізм містить вузол кріплення з елементами для проходу еластичних трубопроводів, притискний елемент та механічний привід, що забезпечує пересування зазначеного притискного елемента відносно вузла кріплення, блок керування електрично зв'язаний з маніпулятором та виконавчим пристроєм, електропривід виконано електрично зв'язаним з блоком керування, причому притискний елемент виконано з можливістю пересування в площині, перпендикулярній поздовжній осі електропривода, електропривід закріплений жорстко до зазначеного вузла кріплення, а механічний привід закріплений жорстко до осі електропривода, який відрізняється тим, що електропривід виконано у вигляді реверсивного електродвигуна.
2. Дозатор електронний за п. 1, який відрізняється тим, що електропривід виконано або у вигляді реверсивного електродвигуна з редуктором, або реверсивного електродвигуна без редуктора.
3. Дозатор електронний за п. 1, який відрізняється тим, що механічний привід виконано з можливістю пересування притискного елемента або в площині, перпендикулярній поздовжній осі електропривода, або уздовж зазначеної повздовжньої осі.
4. Дозатор електронний за п. 1, який відрізняється тим, що електропривід виконано таким, що споживає електричну енергію тільки під час пересування притискного елемента.
5. Дозатор електронний за п. 1, який відрізняється тим, що виконавчий пристрій виконано з можливістю плавної/регульованої зміни перерізу еластичного трубопроводу, по якому рухається потік рідини.
Текст
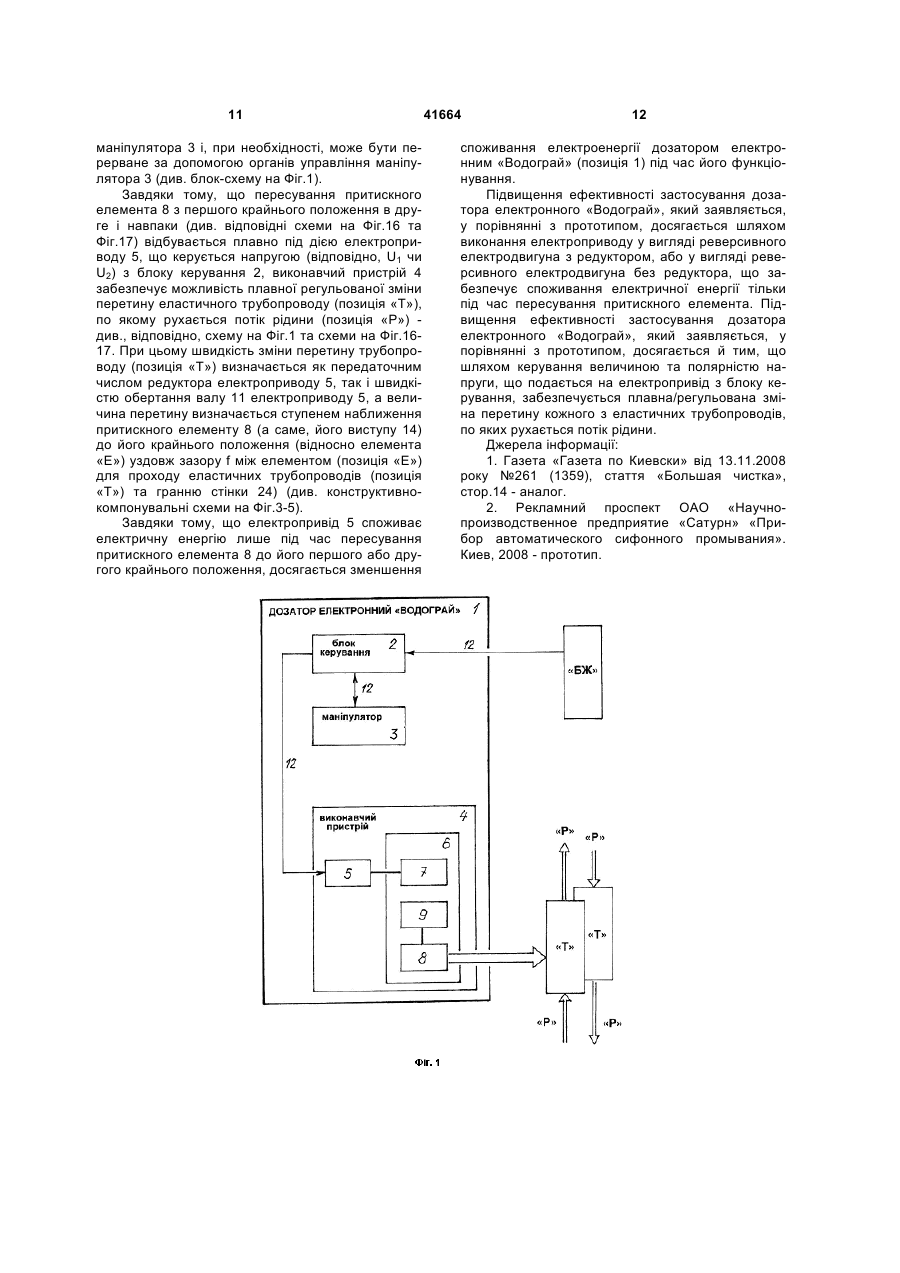
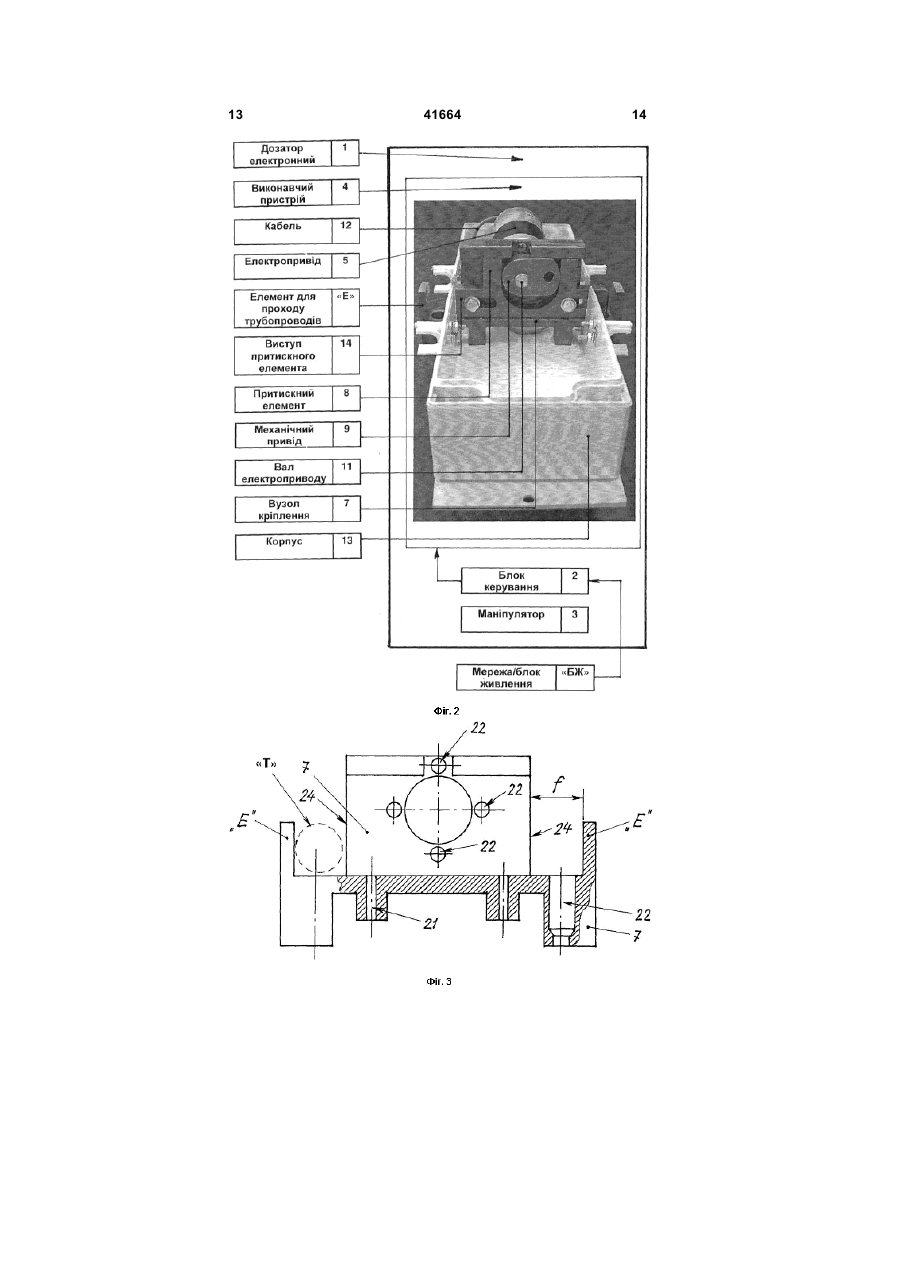
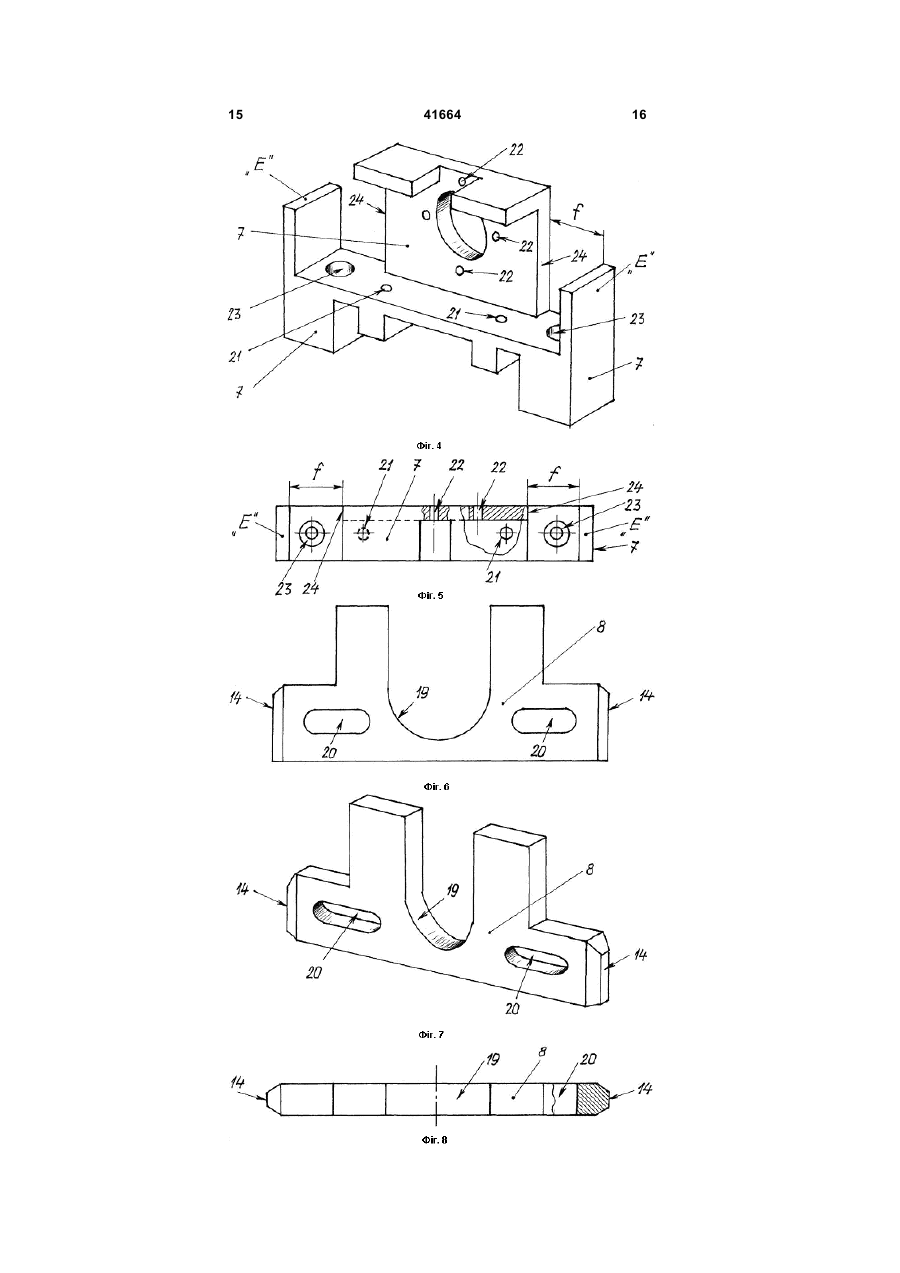
1. Дозатор електронний, що містить блок керування, маніпулятор та виконавчий пристрій, який змінює переріз еластичного трубопроводу, по якому рухається потік рідини, при цьому конструктивні елементи зазначених блока керування, маніпулятора та виконавчого пристрою розміщені у відповідних корпусах, виконавчий пристрій містить електропривід та виконавчий механізм, виконавчий механізм містить вузол кріплення з елементами для проходу еластичних трубопроводів, притискний елемент та механічний привід, що забезпечує пересування зазначеного притискного елемента відносно вузла кріплення, блок керування електрично зв'язаний з маніпулятором та виконавчим пристроєм, електропривід виконано електрично U 2 41664 1 3 До недоліків відомого пристрою для гідроколонотерапії відноситься те, що він при роботі має підвищене споживання електроенергії за рахунок використання як виконавчого пристрою (що забезпечує зміну перетину еластичного трубопроводу, по якому рухається потік рідини, наприклад, води) соленоїда/електромагніта. Найбільш близьким технічним рішенням, як по суті, так і за задачами, що вирішуються, яке обрано за найближчий аналог (прототип), є дозатор електронний, що містить блок керування, маніпулятор та виконавчий пристрій, який змінює перетин еластичного трубопроводу, по якому рухається потік рідини, при цьому конструктивні елементи зазначених блока керування, маніпулятора та виконавчого пристрою розміщені у відповідних корпусах, виконавчий пристрій містить електропривід та виконавчий механізм, виконавчий механізм містить вузол кріплення, притискний елемент та механічний привід, що забезпечує пересування зазначеного притискного елемента відносно вузла кріплення, блок керування електрично зв'язаний з маніпулятором, виконавчим пристроєм та мережею/блоком електроживлення, електропривід виконано електрично зв'язаним з блоком керування, причому притискний елемент виконано з можливістю пересування уздовж осі електропривода, а електропривід закріплений жорстко до зазначеного вузла кріплення [2]. Конструктивно електропривід виконавчого пристрою виконано у вигляді соленоїда/електромагніта. До недоліків відомого дозатора електронного, який обраний за найближчий аналог (прототип), відноситься те, що електропривід (який виконано у вигляді соленоїда/електромагніта) виконавчого пристрою споживає електроенергію як під час пересування притискного елемента, так і під час його утримання в одному з робочих положень. До недоліків відомого дозатора електронного відноситься й те, що він при роботі має підвищене споживання електроенергії за рахунок використання зазначеного соленоїда/електромагніта. В основу корисної моделі покладена задача шляхом застосування електроприводу іншого типу, який приводить в дію притискний елемент, що змінює перетин еластичного трубопроводу, по якому рухається потік рідини, забезпечити покращення електричних характеристик дозатора, зокрема, зменшення споживання електроенергії, а також підвищення надійності роботи зазначеного дозатора. Суть корисної моделі у дозаторі електронному «Водограй», що містить блок керування, маніпулятор та виконавчий пристрій, який змінює перетин еластичного трубопроводу, по якому рухається потік рідини, при цьому конструктивні елементи зазначених блока керування, маніпулятора та виконавчого пристрою розміщені у відповідних корпусах, виконавчий пристрій містить електропривід та виконавчий механізм, виконавчий механізм містить вузол кріплення з елементами для проходу еластичних трубопроводів, притискний елемент та механічний привід, що забезпечує пересування зазначеного притискного елемента відносно вузла кріплення, блок керування електрично зв'язаний з 41664 4 маніпулятором та виконавчим пристроєм, електропривід виконано електрично зв'язаним з блоком керування, причому притискний елемент виконано з можливістю пересування в площині, перпендикулярній поздовжній осі електропривода, електропривід закріплений жорстко до зазначеного вузла кріплення, а механічний привід закріплений жорстко до осі електропривода, полягає в тому, що електропривід виконано у вигляді реверсивного електродвигуна. Суть корисної моделі полягає і в тому, що електропривід виконано або у вигляді реверсивного електродвигуна з редуктором, або реверсивного електродвигуна без редуктора, а механічний привід виконано з можливістю пересування притискного елемента або в площині, перпендикулярній поздовжній осі електропривода, або уздовж зазначеної повздовжньої осі. Суть корисної моделі полягає також і в тому, що електропривід виконано таким, що споживає електричну енергію тільки під час пересування притискного елемента, а виконавчий пристрій виконано з можливістю плавної/регульованої зміни перетину еластичного трубопроводу, по якому рухається потік рідини. Порівняльний аналіз технічного рішення із прототипом, дозволяє зробити висновок, що дозатор електронний «Водограй», який заявляється, відрізняється тим, що електропривід виконано або у вигляді реверсивного електродвигуна з редуктором, або реверсивного електродвигуна без редуктора, при цьому механічний привід виконано з можливістю пересування притискного елемента або в площині, перпендикулярній поздовжній осі електропривода, або уздовж зазначеної повздовжньої осі, причому електропривід виконано таким, що споживає електричну енергію тільки під час пересування притискного елемента, а виконавчий пристрій виконано з можливістю плавної/регульованої зміни перетину еластичного трубопроводу, по якому рухається потік рідини. Таким чином, дозатор електронний «Водограй», який заявляється, відповідає критерію корисної моделі «новизна». Суть корисної моделі пояснюється за допомогою ілюстрацій, де на Фіг.1 показана блок-схема дозатора електронного «Водограй», який заявляється, на Фіг. 2 показана схема розташування елементів виконавчого пристрою, дозатора електронного «Водограй», який заявляється, в корпусі (зі знятою кришкою), на Фіг.3 показана конструктивно-компонувальна схема вузла кріплення на вигляді спереду, на Фіг.4 показаний загальний вина вигляді гляд вузла кріплення у ракурсі 3 4 спереду, на Фіг.5 показана конструктивнокомпонувальна схема вузла кріплення на вигляді зверху, на Фіг.6 показана конструктивнокомпонувальна схема притискного елемента на вигляді спереду, на Фіг.7 показаний загальний вигляд притискного елемента у ракурсі 3 на вигля4 ді спереду, на Фіг.8 показана конструктивнокомпонувальна схема притискного елемента на вигляді зверху, на Фіг.9 показана конструктивнокомпонувальна схема механічного приводу на вигляді спереду, на Фіг.10 показана конструктивно 5 компонувальна схема механічного приводу на вигляді збоку, на Фіг.11 показаний загальний вигляд механічного приводу у ракурсі 3 на вигляді спе4 реду, на Фіг.12 показана конструктивнокомпонувальна схема виконавчого пристрою, дозатора електронного «Водограй», який заявляється, в корпусі (зі знятою кришкою) у ракурсі 3 4 спереду з боку вузла кріплення, на Фіг.13 показана конструктивно-компонувальна схема виконавчого пристрою дозатора електронного «Водограй», який заявляється, на Фіг.14 показана схема пересування притискного елемента в площині (позиція W), перпендикулярній поздовжній осі електропривода, на Фіг.15 показана схема пересування притискного елемента в площині (позиція Q) уздовж зазначеної повздовжньої осі електропривода, на Фіг.16-17 показані схеми спрацьовування елементів виконавчого пристрою дозатора електронного «Водограй», який заявляється, в крайніх положеннях притискного елемента. Дозатор електронний «Водограй» (позиція 1) містить (як варіант конструктивного виконання див. схеми на Фіг.1 та на Фіг.2-9) блок керування 2, маніпулятор 3 та виконавчий пристрій 4, який змінює перетин еластичного трубопроводу (див. позицію «Т» на Фіг.1 та Фіг.9), по якому рухається потік рідини (див. позицію «Р» на Фіг.1). Конструктивні елементи зазначених блока керування 2, маніпулятора 3 та виконавчого пристрою 4 розміщені у відповідних корпусах (див. Фіг.2 та Фіг.9). Конструктивно виконавчий пристрій 4 містить електропривід 5 та виконавчий механізм 6 (див. Фіг.12 та Фіг.9). Зазначений виконавчий механізм 6 конструктивно містить вузол кріплення 7 з елементами (позиція «Е») для проходу еластичних трубопроводів (позиція «Т») (див. схему на Фіг.3), притискний елемент 8 та механічний привід 9, що забезпечує пересування зазначеного притискного елемента 8 відносно вузла кріплення 7 (див. Фіг.2 та Фіг.9-13). Конструктивно і технологічно блок керування 2 електрично зв'язаний з маніпулятором 3 та виконавчим пристроєм 4 (а також з мережею/блоком електроживлення - позиція «БЖ») (див. схему на Фіг.1). Конструктивно і технологічно електропривід 5 виконано електрично зв'язаним безпосередньо з блоком керування 2 (див. схему на Фіг.1). Конструктивно і технологічно притискний елемент 8 виконано з можливістю пересування в площині (позиція W), перпендикулярній поздовжній осі 10 електропривода 5 (див. схему на Фіг.10). Електропривід 5 технологічно закріплений жорстко до зазначеного вузла кріплення 7 (див. схеми на Фіг.9), а механічний привід 9 закріплений жорстко до осі 10 електропривода 5. Конструктивно електропривід 5 виконано у вигляді реверсивного електродвигуна (див. Фіг.2 та Фіг.9), при цьому зазначений електропривід 5 конструктивно виконано або у вигляді реверсивного електродвигуна з редуктором, або у вигляді реверсивного електродвигуна без редуктора. Електропривід 5 виконано таким, що конструктивно містить вал 11, до якого закріплюється механічний привід 9 (див. Фіг.9). Конструктивно механічний привід 9 виконано з 41664 6 можливістю пересування притискного елемента 8 або в площині (позиція W), перпендикулярній поздовжній осі 10 електропривода 5 (див. схему на Фіг.10), або уздовж зазначеної повздовжньої осі 10 електропривода 5 (наприклад, в площині Q) - див. схему на Фіг.11. Конструктивно і технологічно зазначений електропривід 5 виконано таким, що споживає електричну енергію тільки під час пересування притискного елемента 8, а виконавчий пристрій 4 виконано з можливістю плавної/регульованої зміни (за допомогою притискного елемента 8) перетину еластичного трубопроводу (позиція «Т»), по якому рухається потік рідини (позиція «Р»). Блок керування 2 з'єднується, з маніпулятором 3 та виконавчим пристроєм 4, а також з мережею/блоком електроживлення (позиція «БЖ») за допомогою електричного кабелю 12 (див. схему на Фіг.1). Виконавчий пристрій 4 розміщений у корпусі 13 (див. схеми на Фіг.2 та на Фіг.12-17). Притискний елемент 8 має виступи 14 (див. схеми на Фіг. 6-8, Фіг.12 та Фіг.14-17) для натискання на стінку 15 еластичного трубопроводу (позиція «Т»). Дозатор електронний «Водограй» використовується (експлуатується) таким чином. Попередньо виготовляють конструктивні елементи (позиції 2-4) дозатора електронного «Водограй», при цьому конструктивно виконавчий пристрій 4 виконують таким, що містить електропривід 5 та виконавчий механізм 6 (див. Фіг.1-2 Фіг.12-13 та Фіг.16-17). Зазначений виконавчий механізм 6 конструктивно виконують таким, що містить вузол кріплення 7 (див. Фіг.3-5), притискний елемент 8 (див. Фіг.6-8) та механічний привід 9 (який забезпечує пересування зазначеного притискного елемента 8 відносно вузла кріплення 7 (відповідно, у зібраному дозаторі 1) (див. Фіг.9-11) (як варіанти конструктивного виконання). Конструктивно електропривід 5 виконано у вигляді реверсивного електродвигуна (див. Фіг.2, Фіг.12-13 та Фіг.16-17), при цьому зазначений електропривід 5 конструктивно виконано або у вигляді реверсивного електродвигуна з редуктором, або у вигляді реверсивного електродвигуна без редуктора. Конструктивно та технологічно зазначений електропривід 5 виконують у вигляді пристрою, що має елементи 16 (отвори, виступи) кріплення до вузла кріплення 7 та вал 11 (з повздовжньою віссю 10) з елементами сполучення (лиска, заглиблення для штифта тощо), які забезпечують кріплення електропривода 5 до механічного привода 9 (див. схеми на Фіг.2, Фіг.12-13 та Фіг.16-17). Механічний привід 9 виконують у вигляді (як варіант конструктивного виконання - див. схеми на Фіг.9-11 та Фіг.12) об'ємного виробу циліндричної форми, основа якого має форму кола або овалу (або іншу форму), а форма бічної поверхні 17 забезпечує ковзке сполучення механічного приводу 9 з притискним елементом 8 (див. схему на Фіг.12). Зазначений механічний привід 9 виконують з елементами (отворами 18) (див. схеми на Фіг.9, 11, 12), які забезпечують його кріплення до валу 11 електропривода 5. Конструктивно та технологічно механічний привід 9 (як варіант) може бути виконаний у вигляді черв'ячної передачі (яка забезпечує переміщення притискного елемента 8 в пло 7 щині Q, яка проходить уздовж осі 10 електропривода 5 (а саме, уздовж осі 10 вала 11 - див. схему на Фіг.15). Притискний елемент 8 виконують у вигляді об'ємного виробу, що має форму паралелепіпеду, або іншу форму (див. схеми на Фіг.6-8 та Фіг.12). Зазначений притискний елемент 8 має елемент 19 (заглиблення, отвір, різьбовий отвір), що забезпечує його ковзке механічне сполучення з механічним приводом 9. Притискний елемент 8 містить елементи (отвори 20), що забезпечують його ковзке кріплення до вузла кріплення 7 (зазначене ковзке кріплення забезпечує можливість пересування притискного елементу 8 відносно вузла кріплення 7) (див. схеми на Фіг.6-7 та Фіг.12). Зазначений притискний елемент 8 має виступи 14 для здійснення механічного тиску на зовнішню бічну поверхню (стінку 15) еластичних трубопроводів (позиція «Т») (див. схеми на Фіг.12, Фіг.16-17). Конструктивно і технологічно притискний елемент 8 виконують з можливістю пересування уздовж осі 10 вала 11 електропривода 5 (відповідно, після закріплення електропривода 5 до вузла кріплення 7). При цьому притискний елемент 8 (виконавчого механізму 6) виконують з можливістю пересування зазначеного притискного елемента 8 або уздовж осі 10 вала 11 електропривода 5 (наприклад, в площині Q, що проходить по осі 10 вала 11) - див. схему на Фіг.15, або в площині (позиція W), перпендикулярній зазначеній поздовжній осі 10 вала 11 див. схеми на Фіг.14 та Фіг.16-17. Конструктивно і технологічно зазначений електропривід 5 виконують таким, що споживає електричну енергію тільки під час пересування притискного елемента 8 (що здійснюється для зміни перетину еластичного трубопроводу (позиція «Т») при роботі дозатора 1), а виконавчий пристрій 4 виконують з можливістю плавної/регульованої зміни (за допомогою блоку керування 2 і притискного елемента 8) перетину еластичного трубопроводу (позиція «Т»), по якому рухається потік рідини (позиція «Р») (що відбувається, відповідно, при роботі дозатора 1). Блок керування 2 конструктивно виконують у вигляді (як варіант конструктивного виконання) уніфікованої капсули відповідних розмірів. До внутрішнього об'єму зазначеної капсули вмонтовують електронний керуючий пристрій з джерелом живлення. Блок керування 2 додатково містить органи управління (наприклад, перемикачі), органи індикації (наприклад, світлодіоди, монітор тощо), кабелі 12 для підключення блоку керування 2 до мережі/блоку електроживлення (позиція «БЖ») та виконавчого пристрою 4, та роз'єм для підключення маніпулятора 3 (як варіант застосування вищезазначених пристроїв). Маніпулятор 3 виконують у вигляді (як варіант конструктивного виконання) уніфікованої капсули відповідних розмірів, до внутрішнього об'єму якої вмонтовують органи індикації. Маніпулятор 3 додатково містить органи управління (наприклад, перемикачі) та кабель 12 для підключення до блоку керування 2 (див. схему на Фіг.1). Вузол кріплення 7 виконують у вигляді (як варіант конструктивного виконання - див. схеми на 41664 8 Фіг.3-5) об'ємного виробу у формі паралелепіпеда з елементами (отворами, позиції 21 та 22) для кріплення до корпусу 13 виконавчого пристрою 4, електроприводу 5, притискного елемента 8 та з елементами (позиція «Е» - див. схеми на Фіг.3-5) (наприклад, заглибленнями, скобами) для утримання першого та другого еластичних трубопроводів (позиція «Т») (див. схеми на Фіг.12, 14-15 та 16-17). Зазначений вузол кріплення 7 виконують з отворами 23 для кріплення його до основи (наприклад, до стіни, підлоги), що існує в приміщенні, в якому розташовується дозатор електронний «Водограй» (позиція 1). Після цього конструктивні елементи зазначених блока керування 2, маніпулятора 3 та виконавчого пристрою 4 розміщують у відповідних корпусах, при цьому електропривід 5 технологічно закріплюють жорстко до зазначеного вузла кріплення 7 (див. схеми на Фіг.2, Фіг.12-15 та Фіг.1617). Далі збирають із зазначених конструктивних елементів (позиції 2-9) дозатор електронний «Водограй» (позиція 1 - див. блок-схему на Фіг.1 та Фіг.12-13). При цьому конструктивно і технологічно блок керування 2 електрично зв'язують з маніпулятором 3 та виконавчим пристроєм 4 (та з мережею/блоком електроживлення - позиція «БЖ» (див. блок-схему на Фіг.1), а електропривід 5 електрично зв'язують з блоком керування 2. Як мережа/блок електроживлення (позиція «БЖ») може бути застосована або мережа перемінного струму 220В 50Гц, або мережа постійного струму (наприклад, 28В), або акумулятори, при цьому додатково можуть бути використані пристрої безперебійного електроживлення, що приєднані до зазначених мереж електроживлення. Далі конструктивно і технологічно проводять складання дозатора електронного «Водограй» (позиція 1). При цьому до зазначеного вузла кріплення 7 (виконавчого механізму 6) за допомогою, наприклад, гвинтів (що проходять крізь отвори 22) прикріплюють електропривід 5 та притискний елемент 8. Далі за допомогою, наприклад, гвинта прикріплюють механічний привід 9 до валу 11 електроприводу 5 (див. схему на Фіг.12). Після цього встановлюють вузол кріплення 7 разом з прикріпленими до нього електроприводом 5 з механічним приводом 9 та притискним елементом 8 до корпусу 13 виконавчого механізму 6, та скріплюють їх, наприклад, гвинтами (див. Фіг.12-13 та Фіг.16-17). Далі встановлюють виконавчий механізм 6 на основу (стіна, підлога - щодо приміщення, де встановлюється дозатор 1) та прикріпляють до неї, наприклад, гвинтами (що проходять через отвори 23 вузла кріплення 7). Вкладають перший та другий еластичні трубопроводи (позиція «Т»), по яких протікає рідина (позиція «Р»), до зазначених елементів (позиція «Е») у зазор f вузла кріплення 7, призначених для утримання еластичних трубопроводів (позиція «Т») (див. схеми на Фіг.3-5, на Фіг.12-13 та Фіг.14-17). Після цього за допомогою відповідного кабелю (позиція 12) під'єднують блок керування 2 до виконавчого пристрою 4 (див. схему на Фіг.1). Маніпу 9 лятор 3 за допомогою кабелю (позиція 12) під'єднують до блоку керування 2 (див. схему на Фіг.1). Зібраний таким чином дозатор електронний «Водограй» (позиція 1) використовується для дозування рідини (наприклад, води), що проходить (протікає) по еластичних трубопроводах (позиція «Т»), і може бути застосований для дозування лікувальних рідин в бальнеологічних лікувальних закладах. Для показу роботи дозатора електронного «Водограй», який заявляється, наведений приклад його застосування при дозуванні лікувальних рідин в бальнеологічних лікувальних закладах (схема роботи виконавчого пристрою 4 дозатора електронного «Водограй», який заявляється, показана на Фіг.16-17). Блок керування 2 електронного дозатора 1 за допомогою відповідного кабелю (позиція 12) вмикають до мережі/блоку електроживлення (позиція «БЖ»), наприклад, через блок безперебійного живлення (як варіант конструктивного виконання мережі/блоку електроживлення - позиція «БЖ»). Далі за допомогою органів управління блоку керування 2 задають програму роботи дозатора (позиція 1) і починають її виконання. При цьому блок керування 2 у відповідності до заданої програми роботи подає на електропривід 5 виконавчого пристрою 4 напругу відповідної полярності (позиція U1 - див. Фіг.16), під дією якої вал 11 електроприводу 5 (який виконано або у вигляді реверсивного електродвигуна з редуктором, або у вигляді реверсивного електродвигуна без редуктора) починає обертатися у відповідному напрямку (позиція М1 - див. Фіг.16). Механічний привід 9, прикріплений до валу 11 електроприводу 5, рухаючись разом з ним, передає обертове зусилля валу 11 через виріз 19 на притискний елемент 8 і пересуває його (уздовж отворів 20) у перше крайнє положення відносно вузла кріплення 7 (див. схему на Фіг.16). Після досягнення зазначеного першого крайнього положення притискного елемента 8 блок керування 2 відключає напругу від електроприводу 5 виконавчого пристрою 4. Вал 11 електроприводу 5 зупиняється і утримує притискний елемент 8 у першому крайньому положенні (переміщеним відповідно вправо - див. схему на Фіг.16). В зазначеному першому крайньому положенні притискного елемента 8 (див. схему на Фіг.16) перший з двох еластичних трубопроводів (позиція «Т»), вкладених до вузла кріплення 6 (а саме, в зазор f між елементами (позиція «Е») для проходу еластичних трубопроводів (позиція «Т») та гранню стінки (позиція 24) вузла кріплення 7 - див. схему на Фіг.3, Фіг.12 та Фіг.16), зазнає деформації під дією тиску з боку відповідного виступу 14 притискного елемента 8 (див. схеми на Фіг. 6-8), а його перетин зменшується до нуля, перекриваючи потік рідини (позиція «Р»), що рухається по трубопроводу (позиція «Т») (див. схему на Фіг.16). І навпаки, другий еластичний трубопровід (позиція «Т») (відповідно, лівий - див. схему на Фіг.16) повністю звільняється від дії тиску з боку відповідного виступу 14 притискного елементу 8, внаслідок чого його перетин під дією сил пружності з боку 41664 10 еластичних стінок 15 зазначеного еластичного трубопроводу (позиція «Т») досягає максимуму і повністю звільняє шлях для потоку рідини (позиція «Р»), що рухається трубопроводом (позиція «Т») (лівий трубопровід згідно зі схемою на Фіг.16). Через відрізок часу, тривалість якого визначається програмою роботи дозатора (позиція 1), закладеною до блоку керування 2, зазначений блок керування 2 подає на електропривід 5 виконавчого пристрою 4 напругу зворотної полярності (позиція U2 - див. схему на Фіг.17). Завдяки тому, що електропривід 5 виконано у вигляді реверсивного електродвигуна, його вал 11 під дією напруги зворотної полярності (позиція U2) починає обертатися у зворотному напрямку (позиція М2 - див. схему на Фіг. 17). Механічний привід 9 (див. схеми на Фіг.9-11), прикріплений до валу 11 електроприводу 5, рухаючись разом з ним, передає обертове зусилля валу 11 на притискний елемент 8 (див. схеми на Фіг. 6-8) і пересуває його у друге крайнє положення відносно вузла кріплення 7 та грані стінки (позиція 24) (див. схему на Фіг.17). Після досягнення зазначеного другого крайнього положення притискного елемента 8, блок керування 2 відключає напругу від електроприводу 5 виконавчого пристрою 4. Вал 11 електроприводу 5 зупиняється і утримує притискний елемент 8 у другому крайньому положенні (із зсувом вліво, коли лівий виступ 14 притискного елемента 8 повністю передавить лівий трубопровід (позиція «Т») - див., відповідно, схему на Фіг. 17). В другому крайньому положенні перший (правий - згідно зі схемою на Фіг. 17) з двох еластичних трубопроводів (позиція «Т»), вкладених до вузла кріплення 7 (а саме, в зазор f між елементами (позиція «Е») для проходу еластичних трубопроводів (позиція «Т») та гранню стінки (позиція 24) - див. схеми на Фіг.3-5), повністю звільняється від дії тиску з боку відповідного виступу 14 притискного елементу 8, внаслідок чого його перетин під дією сил пружності з боку еластичних стінок 15 трубопроводу (позиція «Т») досягає максимуму і повністю звільняє шлях для потоку рідини (позиція «Р»), що рухається внутрішньою порожниною трубопроводу (позиція «Т») - а саме, правим трубопроводом (згідно зі схемою на Фіг.17). І навпаки, другий еластичний трубопровід (позиція «Т») - лівий трубопровід (згідно зі схемою на Фіг.17) зазнає деформації під дією тиску з боку відповідного виступу 14 притискного елемента 8, а його перетин зменшується до нуля, перекриваючи потік рідини (позиція «Р»), що рухається по зазначеному трубопроводу (позиція «Т») - лівий трубопровід (згідно зі схемою на Фіг.17). Таким чином, пересуваючи притискний елемент 8 з першого крайнього положення (згідно схеми на Фіг.16) в друге (згідно схеми на Фіг. 17) і навпаки, у відповідності до заданої програми роботи, електронний дозатор (позиція 1) регулює потоки рідини (позиція «Р»), що рухаються першим та другим трубопроводами (позиція «Т») відповідно, правим чи лівим згідно зі схемами на Фіг.16 та Фіг.17. Виконання заданої програми контролюється за допомогою органів індикації блоку керування 2 та 11 маніпулятора 3 і, при необхідності, може бути перерване за допомогою органів управління маніпулятора 3 (див. блок-схему на Фіг.1). Завдяки тому, що пересування притискного елемента 8 з першого крайнього положення в друге і навпаки (див. відповідні схеми на Фіг.16 та Фіг.17) відбувається плавно під дією електроприводу 5, що керується напругою (відповідно, U1 чи U2) з блоку керування 2, виконавчий пристрій 4 забезпечує можливість плавної регульованої зміни перетину еластичного трубопроводу (позиція «Т»), по якому рухається потік рідини (позиція «Р») див., відповідно, схему на Фіг.1 та схеми на Фіг.1617. При цьому швидкість зміни перетину трубопроводу (позиція «Т») визначається як передаточним числом редуктора електроприводу 5, так і швидкістю обертання валу 11 електроприводу 5, а величина перетину визначається ступенем наближення притискного елементу 8 (а саме, його виступу 14) до його крайнього положення (відносно елемента «Е») уздовж зазору f між елементом (позиція «Е») для проходу еластичних трубопроводів (позиція «Т») та гранню стінки 24) (див. конструктивнокомпонувальні схеми на Фіг.3-5). Завдяки тому, що електропривід 5 споживає електричну енергію лише під час пересування притискного елемента 8 до його першого або другого крайнього положення, досягається зменшення 41664 12 споживання електроенергії дозатором електронним «Водограй» (позиція 1) під час його функціонування. Підвищення ефективності застосування дозатора електронного «Водограй», який заявляється, у порівнянні з прототипом, досягається шляхом виконання електроприводу у вигляді реверсивного електродвигуна з редуктором, або у вигляді реверсивного електродвигуна без редуктора, що забезпечує споживання електричної енергії тільки під час пересування притискного елемента. Підвищення ефективності застосування дозатора електронного «Водограй», який заявляється, у порівнянні з прототипом, досягається й тим, що шляхом керування величиною та полярністю напруги, що подається на електропривід з блоку керування, забезпечується плавна/регульована зміна перетину кожного з еластичних трубопроводів, по яких рухається потік рідини. Джерела інформації: 1. Газета «Газета по Киевски» від 13.11.2008 року №261 (1359), стаття «Большая чистка», стор.14 - аналог. 2. Рекламний проспект ОАО «Научнопроизводственное предприятие «Сатурн» «Прибор автоматического сифонного промывания». Киев, 2008 - прототип. 13 41664 14 15 41664 16 17 41664 18 19 41664 20 21 41664 22 23 Комп’ютерна верстка А. Рябко 41664 Підписне 24 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюElectronic dozer vodograi
Автори англійськоюMalchenko Mykhailo Serhiiovych, Matvienko Mykola Vasyliovych, Petelin Oleksii Dmytrovych, Shostak Oleksandr Tykhonovych
Назва патенту російськоюДозатор электронный «водограй»
Автори російськоюМальченко Михаил Сергеевич, Матвиенко Николай Васильевич, Петелин Алексей Дмитриевич, Шостак Александр Тихонович
МПК / Мітки
МПК: B67D 5/00, G01F 11/00
Мітки: електронний, водограй, дозатор
Код посилання
<a href="https://ua.patents.su/12-41664-dozator-elektronnijj-vodograjj.html" target="_blank" rel="follow" title="База патентів України">Дозатор електронний “водограй”</a>
Дозатор для порошкових матеріалів “дозатор мозжухіна”
Номер патенту: 27107
Опубліковано: 25.10.2007
Автор: Мозжухін Анатолій Олександрович
МПК: G01F 13/00
Мітки: мозжухіна, дозатор, матеріалів, порошкових
Формула / Реферат:
1. Дозатор порошкових матеріалів, що містить бункер зі змінним дном з отворами і лопатки, встановлені в бункері перпендикулярно дну з можливістю рухатись паралельно дну, який відрізняється тим, що отвори в дні виконані за розміром такими, що дозований матеріал в стані спокою утворює над ними склепіння, а по формі - у вигляді прямих та/або дугоподібних щілин.2. Дозатор за п. 1, який відрізняється тим, що лопатки вигнуті відносно...
Горілка особлива “водограй”
Номер патенту: 30686
Опубліковано: 17.09.2001
Автори: Кішишев Андрій Борисович, Охлопков Андрій Дмитрович, Григоренко Сергій Анатолійович
МПК: C12G 3/06
Мітки: горілка, особлива, водограй
Формула / Реферат:
Горілка особлива, що містить водно - спиртову рідину з етилового ректифікованого спирту вищої очистки і води питної пом'якшеної та ароматний спирт житніх сухарів, яка відрізняється тим, що додатково містить лимонну і аскорбінову кислоту при такому співвідношенні інгредієнтів на 1000 дал готового продукту: лимонна кислота, кг 0,01-0,03 аскорбінова кислота, кг 1,00-3,00 ...
Електронний ключ з захистом від перевантаження по струму
Номер патенту: 39346
Опубліковано: 15.06.2001
Автори: Чалапчій Юрій Юрійович, Колесніков Микола Миколайович, Сендульський Микола Володимирович
МПК: H03K 17/08, H03K 17/18
Мітки: ключ, струму, захистом, перевантаження, електронний
Формула / Реферат:
Електронний ключ з захистом від перевантаження по струму, який містить силовий транзистор, база якого з'єднана з першим виводом діода і з виводом транзисторного ключа, вивід живлення якого з'єднаний з першим виходом ключа і з колектором силового транзистора, емітер якого з'єднаний з першим виводом резистора, другий вивід якого з'єднаний з другим виводом діода, другим виводом ключа і входом порогового елемента, вихід якого з'єднаний з входом...
Електронний таймер, що програмується для електронного детонатора з затримкою, і електронний детонатор з затримкою
Номер патенту: 27631
Опубліковано: 15.09.2000
Автор: Гвінн Джеймс С. ІІІ
МПК: F42D 1/00, F42C 21/00
Мітки: електронний, електронного, таймер, детонатора, затримкою, програмується, детонатор
Текст:
...люючим ді о дом 4 . За р я дж ен ий конденсатор 3 джерела живлення забезпечує вхідну напругу VCC, яка використовується для живлення решти елементів схеми електронного детонатора з затримкою, включаючи електронний таймер, що програмується. Конденсатор 3 джерела живлення зв'язаний з інтегральною схемою, яка, згідно з одним з втілень винаходу, містить електронний таймер, що програмується, 5. Електронний таймер, що програм ується , місти ть в со...
Електронний пристрій для визначення і відліку часу
Номер патенту: 5456
Опубліковано: 15.03.2005
Автор: Трагнюк Роман Петрович
МПК: G04B 47/00, G04F 7/00, G04C 3/00, G04B 19/00
Мітки: визначення, часу, електронний, пристрій, відліку
Формула / Реферат:
Електронний пристрій для визначення і відліку часу, що містить корпус, годинниковий механізм, розміщений усередині корпусу, інформаційне електронне табло часу й інформаційне електронне табло календаря, зв'язані зі згаданим годинниковим механізмом, пристрій для приведення в дію годинникового механізму, пристрій для приведення в дію інформаційного електронного табло часу і інформаційного електронного табло календаря, основу для кріплення...
Попередній патент: Напівавтоматична установка “spreader bridge” для нанесення топінгу на свіжопокладений бетон
Наступний патент: Універсальний ретрактор для виконання лапароліфтингу
Випадковий патент: Стоматологічний внутрішньокістковий одноетапний імплантат "simplex"