Спосіб прогнозуючого управління силовим активним фільтром в трифазній мережі змінного струму
Номер патенту: 83777
Опубліковано: 25.09.2013
Автори: Бялобржеський Олексій Володимирович, Власенко Руслан Володимирович

Формула / Реферат
Спосіб прогнозуючого управління силовим активним фільтром в трифазній мережі змінного струму, який полягає в тому, що контролюють фазну напругу мережі, фазні струми навантаження на стороні змінного струму та напругу конденсатора на стороні постійного струму, через які визначають на осі абсцис й ординат ортогональної нерухомої координатної системи відповідно проекції вектора напруги та струму, а на осі абсцис й ординат ортогональної рухомої координатної системи прогнозовані значення проекцій вектора напруги і струму, створюваного на стороні змінного струму зазначеного перетворювача при всіх можливих комбінаціях його відкритих і закритих силових ключів, у вигляді різниці згаданих прогнозованих проекцій вектора напруги й струму обчислюють прогнозовані значення проекцій вектора напруги на відповідні осі ортогональної рухомої координатної системи при всіх можливих комбінаціях відкритих і закритих силових ключів перетворювача, контролюють відхилення між заданими й фактичними значеннями проекцій на осі ортогональної рухомої координатної системи вектора струму, створюваного на стороні змінного струму перетворювача, розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення першого прогнозуючого функціонала, з розрахованих значень якого знаходять екстремальне значення даного функціонала, задають припустиму область відхилень проекцій вектора струму для сталих режимів роботи перетворювача, порівнюють контрольовані відхилення проекцій вектора струму із границями допустимої для них області відхилень, причому, якщо контрольовані відхилення проекцій вектора струму перебувають усередині припустимої області, то підтримують незмінною комбінацію відкритих і закритих силових ключів перетворювача, а якщо виходять за межі припустимої області, то задають нову комбінацію відкритих і закритих силових ключів перетворювача такою, яка відповідає знайденому екстремальному значенню першого при умові знаходжень контрольованих відхилень усередині припустимої області, на границях зазначеної припустимої області відхилень для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача розраховують значення другого прогнозуючого функціонала, з розрахованих значень яких знаходять екстремальне значення даного функціонала, при цьому усередині зазначеної припустимої області задають нову комбінацію силових ключів перетворювача такою, яка відповідає екстремальному значенню другого прогнозуючого функціонала, який відрізняється тим, що на підставі проекцій струму навантаження та напруги на стороні змінного струму розраховують складові активної та неактивної потужностей, виділяють неактивну потужність, яка визначається основною гармонікою струму мережі прямої послідовності, та змінні складові активної та неактивної потужностей, які визначаються гармоніками струму навантаження, відмінними від основної, і струмами основної гармоніки зворотної послідовності, розраховують задане значення струму перетворювача в нерухомій системі координат, перетворюють задане значення струму перетворювача в рухому систему координат, розраховують поточне відхилення струму в рухомій системі координат.
Текст
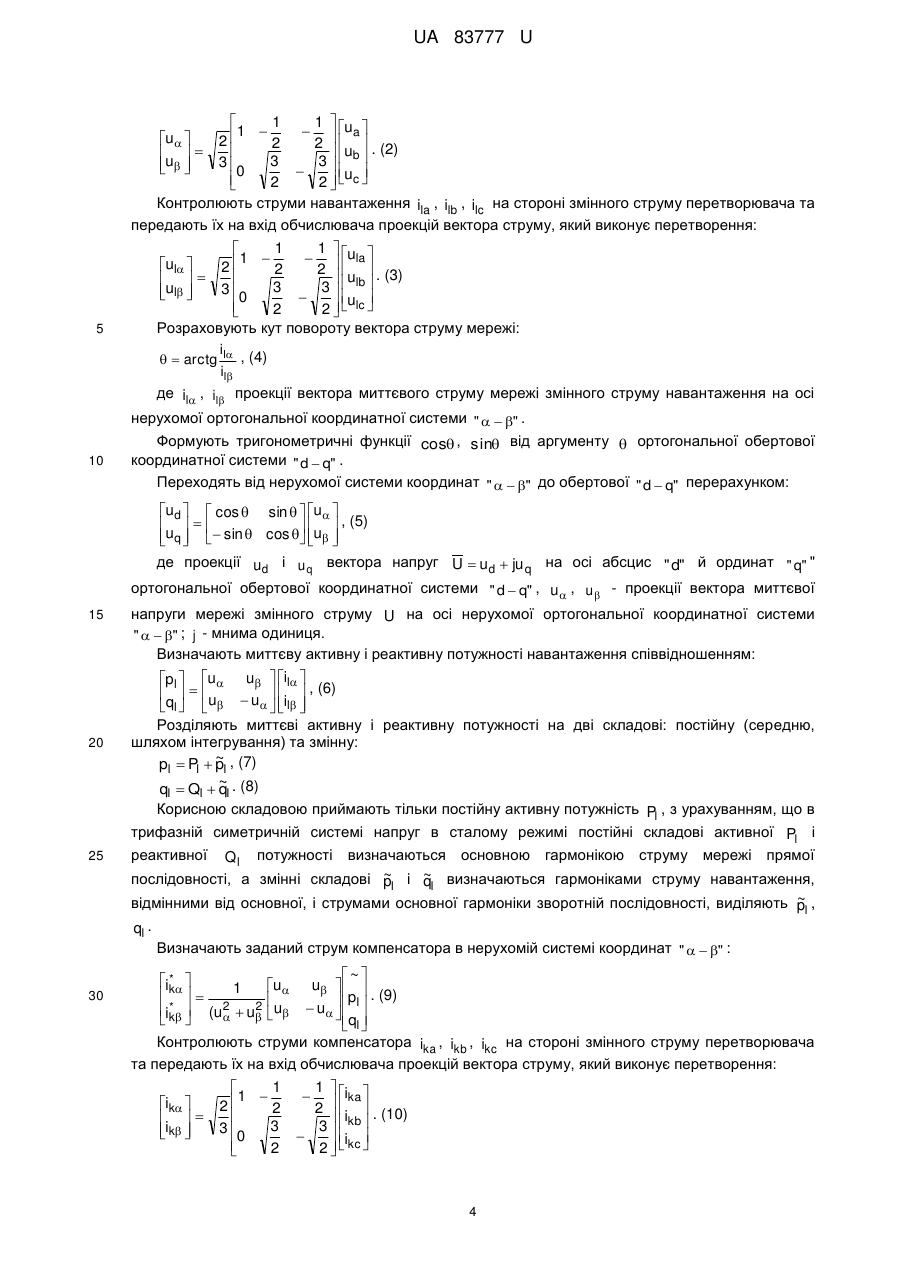
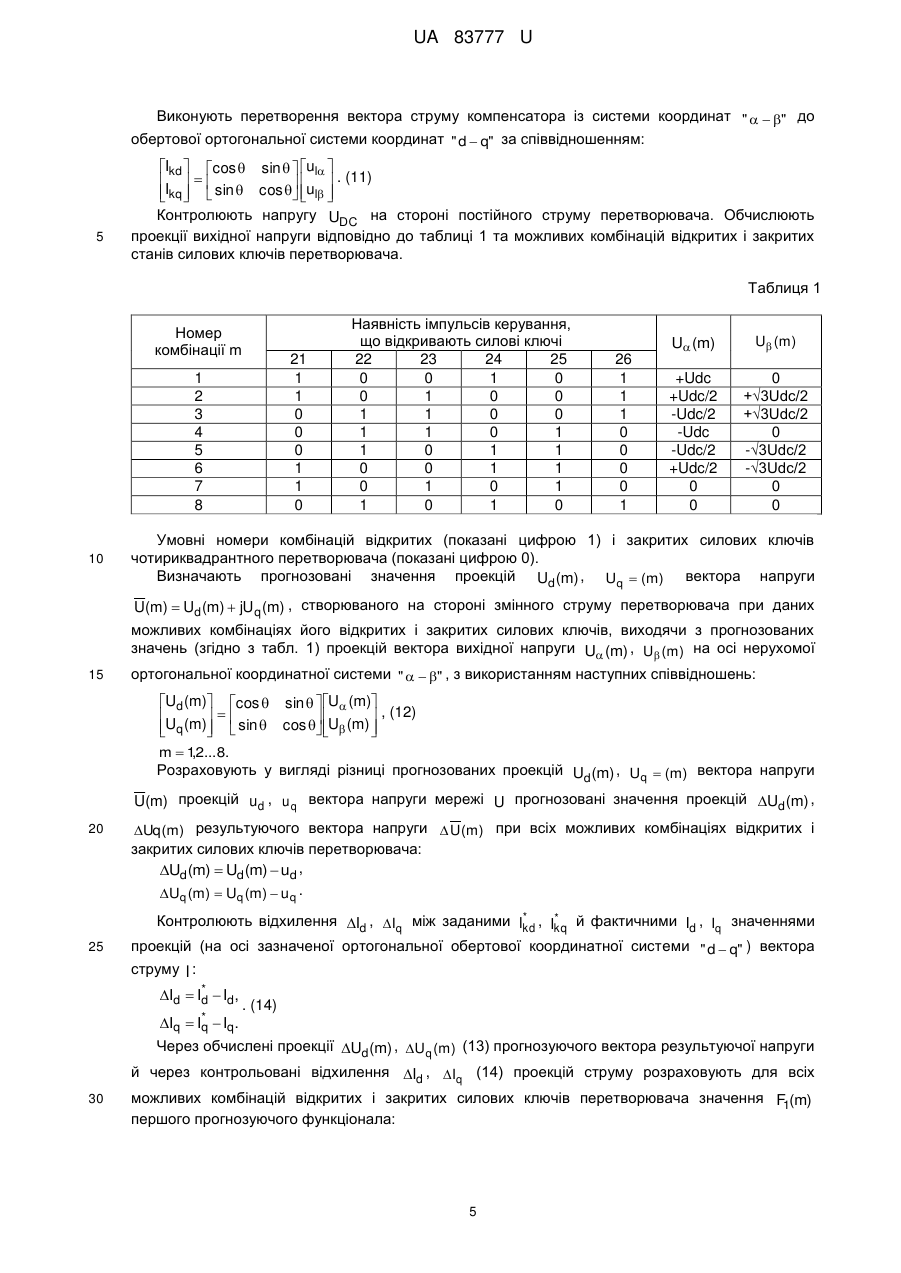
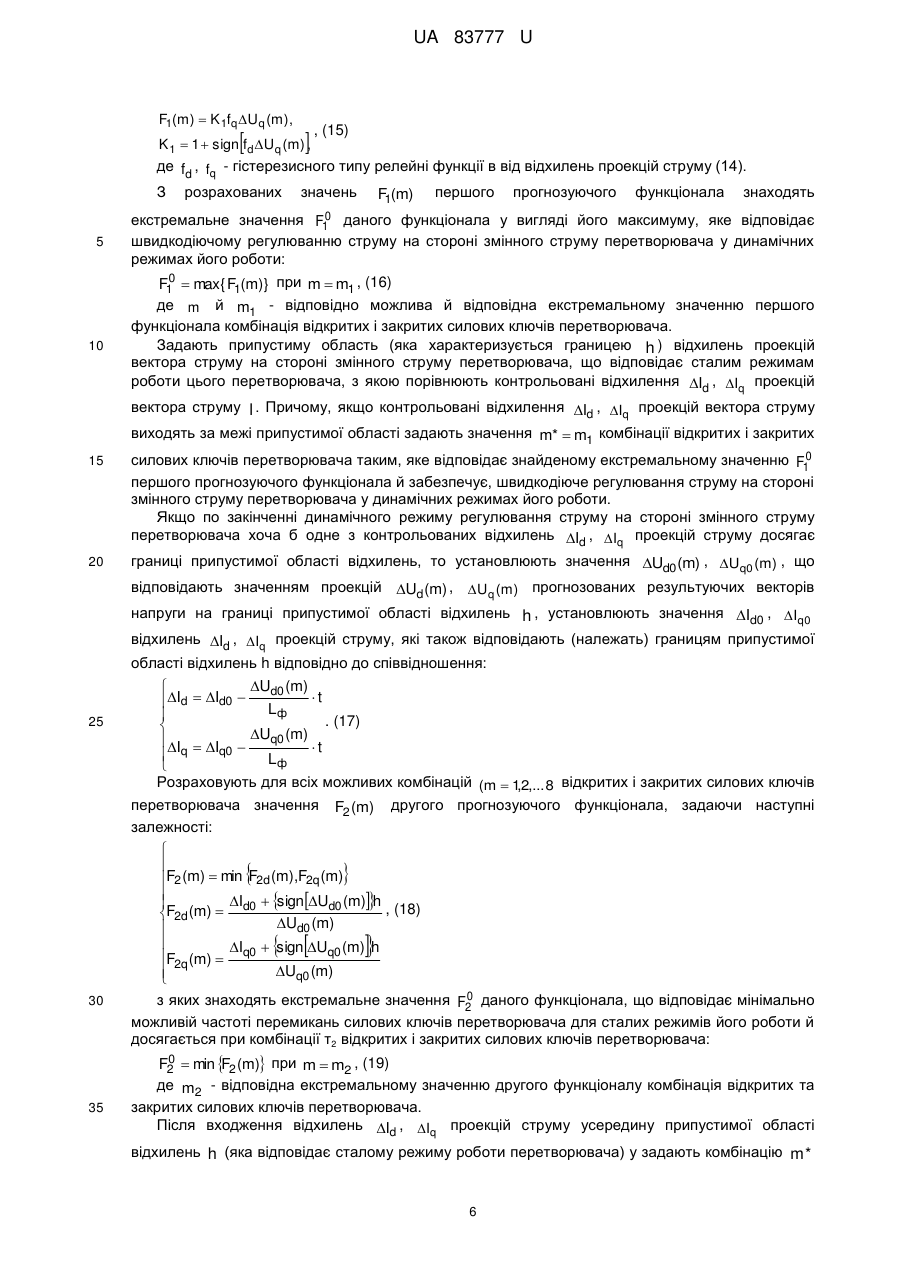
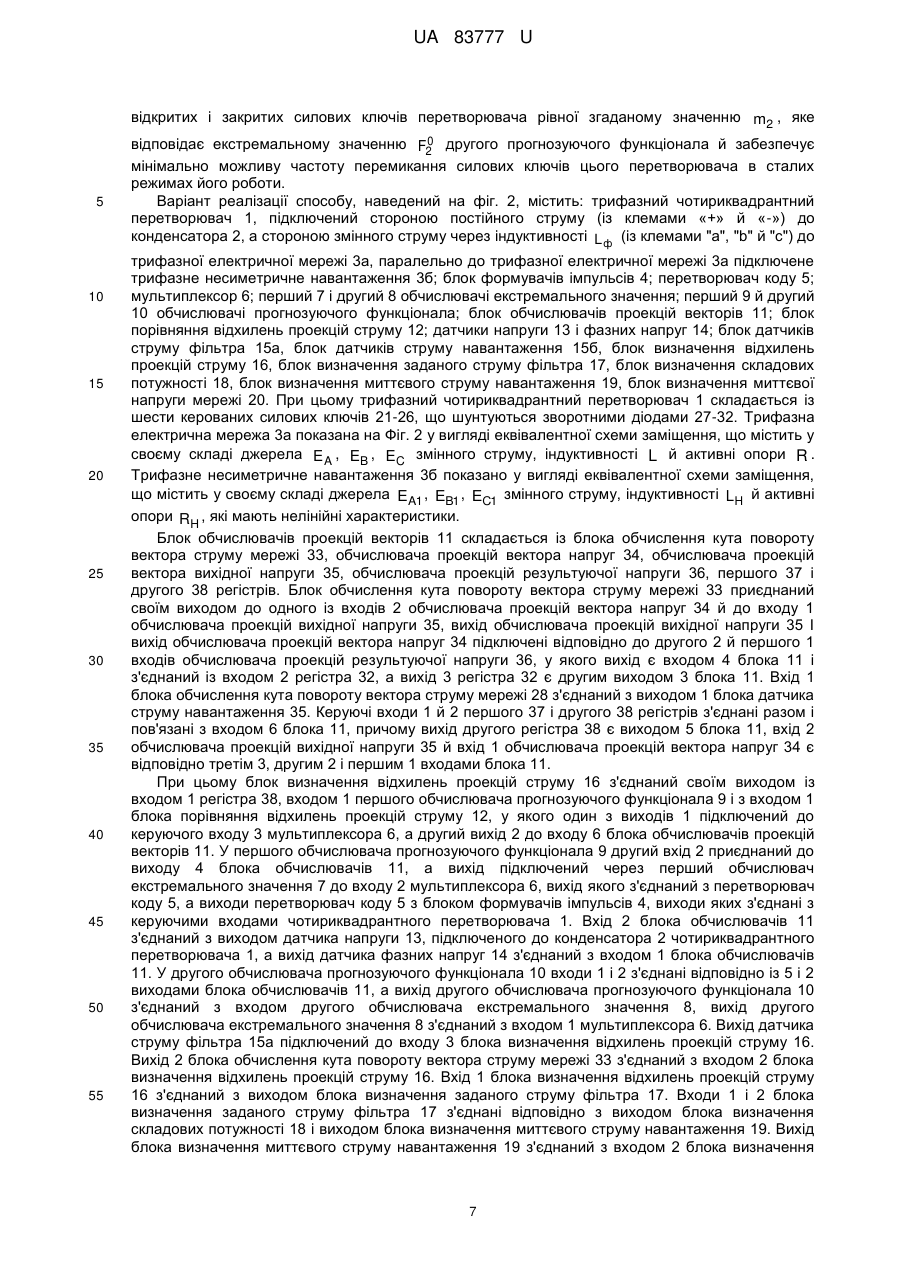
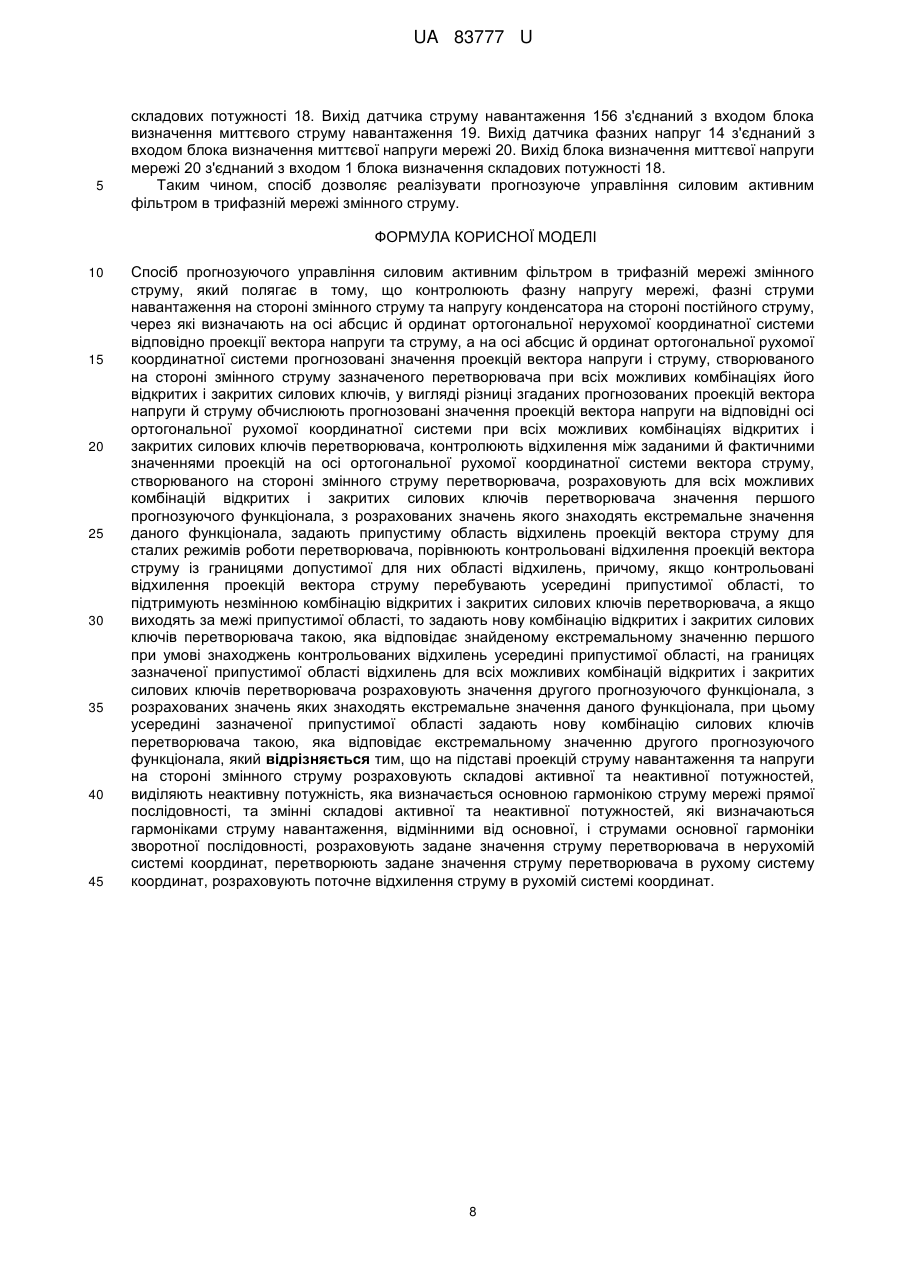
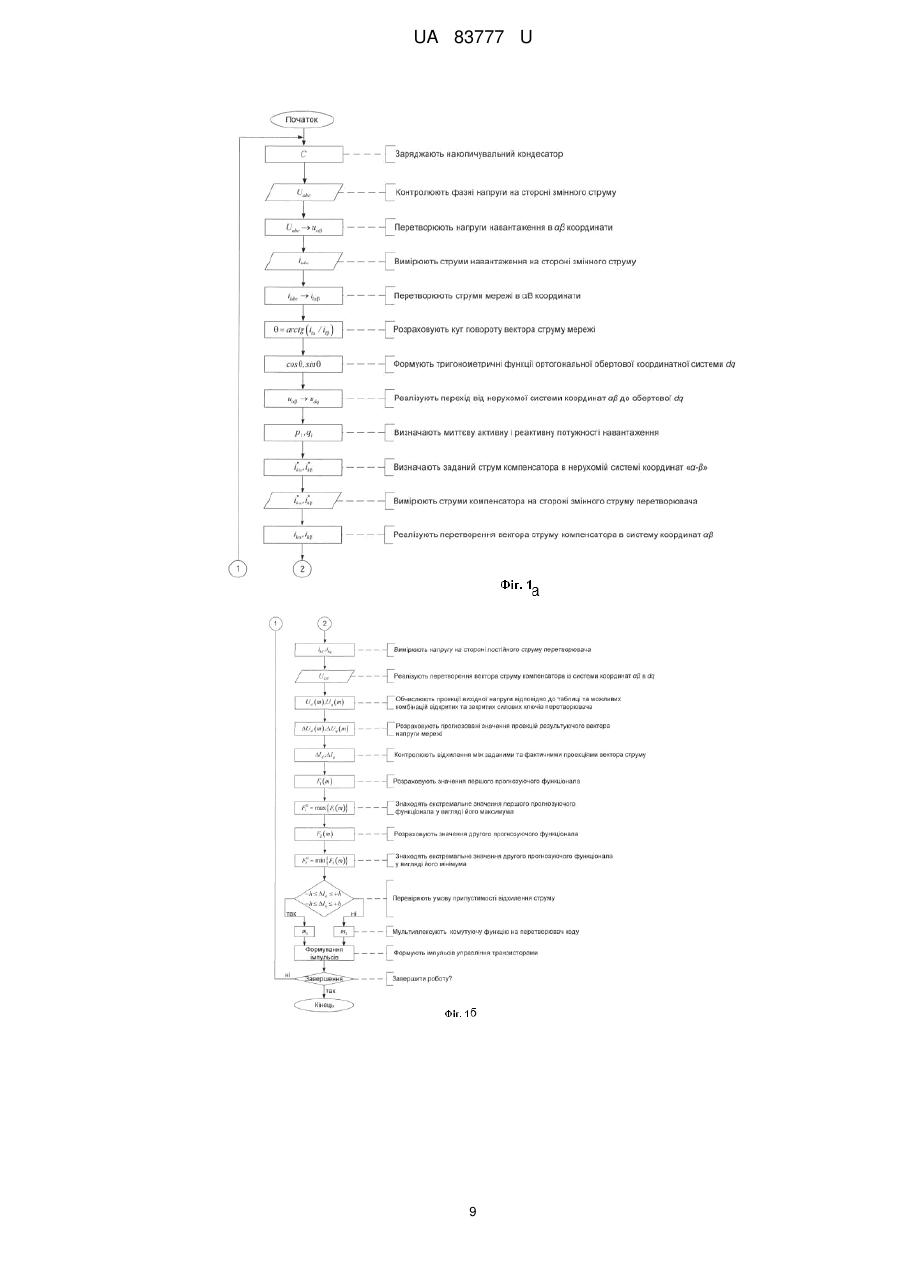
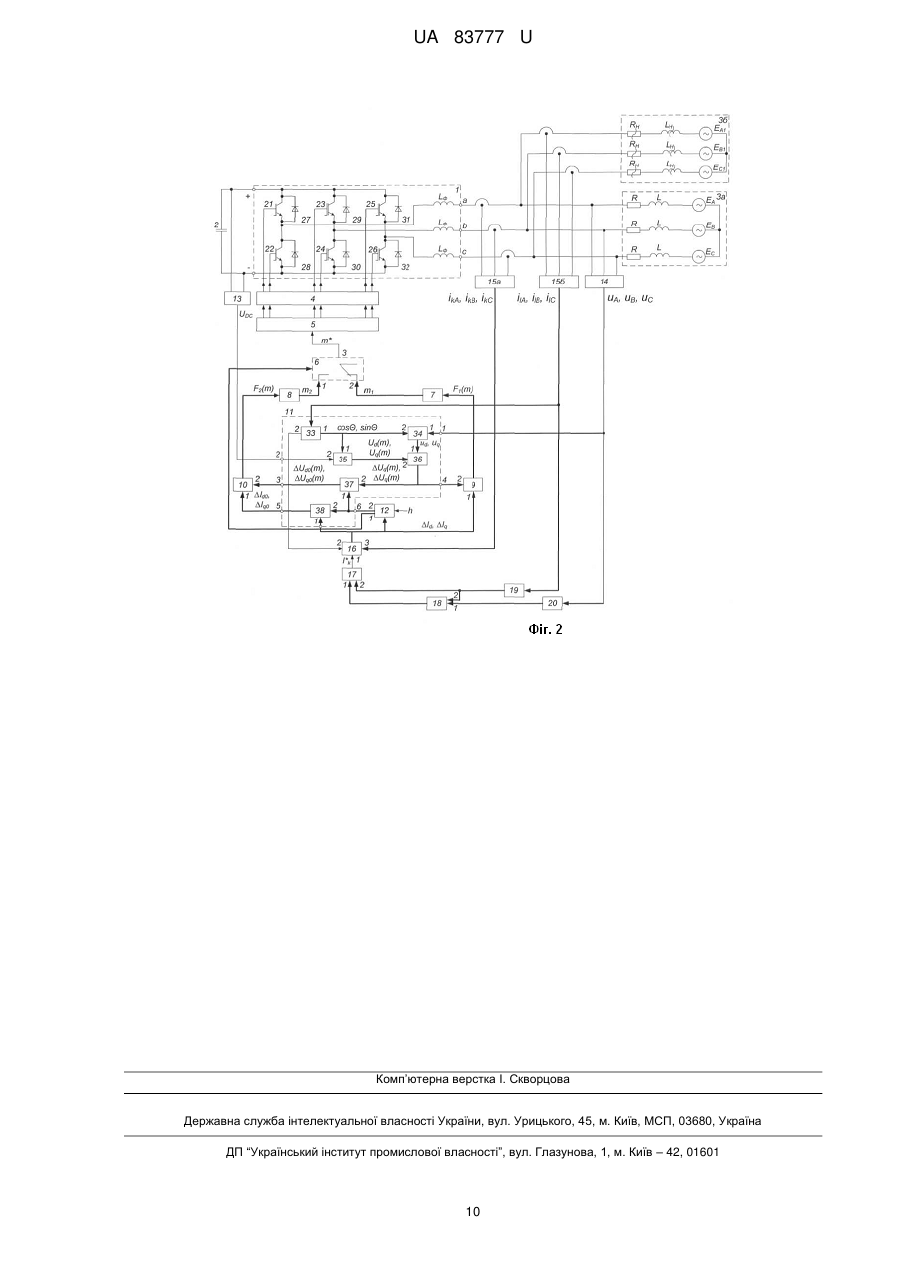
Реферат: Спосіб прогнозуючого управління силовим активним фільтром в трифазній мережі змінного струму полягає в тому, що контролюють фазну напругу мережі, фазні струми навантаження на стороні змінного струму та напругу конденсатора на стороні постійного струму, через які визначають на осі абсцис й ординат ортогональної нерухомої координатної системи відповідно проекції вектора напруги та струму, а на осі абсцис й ординат ортогональної рухомої координатної системи прогнозовані значення проекцій вектора напруги і струму, у вигляді різниці згаданих прогнозованих проекцій вектора напруги й струму обчислюють прогнозовані значення проекцій вектора напруги, контролюють відхилення між заданими й фактичними значеннями проекцій, розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення першого прогнозуючого функціонала, знаходять екстремальне значення даного функціонала, задають припустиму область відхилень проекцій вектора струму для сталих режимів роботи перетворювача, порівнюють контрольовані відхилення проекцій вектора струму із границями допустимої для них області відхилень, розраховують значення другого прогнозуючого функціонала, знаходять екстремальне значення даного функціонала, при цьому усередині зазначеної припустимої області задають нову комбінацію силових ключів перетворювача такою, яка відповідає екстремальному значенню другого прогнозуючого функціонала. На підставі проекцій струму навантаження та напруги на стороні змінного струму розраховують складові активної та неактивної потужностей, виділяють неактивну потужність, яка визначається основною гармонікою струму мережі прямої послідовності, та змінні складові активної та неактивної потужностей, які визначаються гармоніками струму навантаження, відмінними від основної, і струмами основної гармоніки зворотної послідовності, розраховують задане значення струму перетворювача в нерухомій системі координат, перетворюють задане значення струму перетворювача в рухому систему координат, розраховують поточне відхилення струму в рухомій системі координат. UA 83777 U (54) СПОСІБ ПРОГНОЗУЮЧОГО УПРАВЛІННЯ СИЛОВИМ АКТИВНИМ ФІЛЬТРОМ В ТРИФАЗНІЙ МЕРЕЖІ ЗМІННОГО СТРУМУ UA 83777 U UA 83777 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі електротехніки, а саме до активних фільтрів, у яких як автономний інвертор напруги або активний випрямляч використовують трифазний чотириквадрантний перетворювач із широтно-імпульсною модуляцією. Відомий спосіб [Патент RU 2001102907A. Способ прогнозирующего релейно-векторного управления вектором токов сети обратимого преобразователя энергии переменного тока в энергию постоянного тока / Р.Т. Шрейнер, А.А. Ефимов, Г.С. Зиновьев. Дата публикации 12.20.2002, МПК (7) Н02М 7/00], при якому формують масив станів ключів напівпровідникового комутатора, формують масив значень дискретної комутаційної вектор-функції, елементи якої відповідають тільки тим елементам масиву станів, які, будучи реалізовані, дають помітні комбінації фазних напруг на силових входах напівпровідникового комутатора, за результатами прогнозу вибирають те значення комутаційної функції, яке забезпечить отримання вектора струмів мережі, найбільш близького до заданого вектора струмів мережі. Спільною ознакою з пропонованим способом є те, що відомий спосіб передбачає формування масиву станів ключів напівпровідникового комутатора, масиву значень дискретної комутаційної вектор-функції, елементи якої відповідають елементам масиву станів, які будучи реалізовані, і дають комбінації фазних напруг на силових входах напівпровідникового комутатора. Відомий спосіб має наступні недоліки: задання вектора струму мережі, значення якого в реальних умовах залежить від поточного навантаження та підлягає визначенню; відсутній розподіл вектора струму на складові відповідно активної та неактивної потужності, що не дозволяє компенсувати останню. Відоме технічне рішення [Патент RU 228463 5С2. Способ прогнозирующего векторного регулирования четырехквадрантного преобразователя / К.П. Солтус - МПК (51) Н02М 7/48, Н02М 7/527, B60L 9/12.], яке полягає в тому, що фазу вектора струму мережі в кожному півперіоді живлячої напруги регулюють зміною модуляції вхідної напруги, комутацією вентилів чотириквадрантного перетворювача, формується масив значень споживаної потужності перетворювача, елементами якого є допустимі значення фази вектора струму мережі і кута навантаження, формується масив прогнозних значень фази вектора струму мережі, елементами якого є поточне значення фази вектора струму мережі, поточне значення кута навантаження і зміна кута навантаження від поточного значення, які будучи реалізовані, дають помітні комбінації керуючих впливів, відповідних допустимої споживаної потужності перетворювача, причому прогнозна зміна фази вектора струму мережі в залежності від поточного значення фази вектора струму мережі і поточного значення кута навантаження при зміні кута навантаження визначається. Спільними ознаками з пропонованим технічним рішенням є: формування прогнозних значень вектора струму мережі, які будучи реалізовані дають помітні комбінації керуючих впливів; зміна модуляції вхідної напруги комутацією вентилів чотириквадрантного перетворювача. Відомий спосіб має ряд недоліків: навантаження знижують до тих пір, поки кут навантаження не буде відповідати допустимому значенню фази струму мережі із масиву прогнозованих значень, що впливає на навантаження; відсутність розподілу складових струму на складові активної і неактивної потужності, що не дозволяє компенсувати останню. Відомий спосіб [Патент №UA 44892U. Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача / О.В. Волков, В.О. Волков, М.Л. Антонов МПК (51) Н02Р 7/00, Н02Р 21/00], яке полягає в тому, що контролюють фазні електрорушійні сили (ЕРС) на стороні змінного струму й напругу на стороні постійного струму цього перетворювача, через які визначають на осі абсцис й ординат ортогональної координатної системи відповідно проекції узагальненого вектора ЕРС та прогнозовані значення проекцій узагальненого вектора напруги, створюваного на стороні змінного струму зазначеного перетворювача при всіх можливих комбінаціях його відкритих і закритих силових ключів, у вигляді різниці згаданих прогнозованих проекцій узагальненого вектора напруги й узагальненого вектора ЕРС обчислюють прогнозовані значення проекцій результуючого вектора напруги на відповідні осі даної ортогональної координатної системи при всіх можливих комбінаціях відкритих і закритих силових ключів перетворювача, контролюють відхилення між заданими й фактичними значеннями проекцій на осі зазначеної ортогональної координатної системи узагальненого вектора струму, створюваного на стороні змінного струму перетворювача, розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення першого прогнозуючого функціонала, з розрахованих значень якого знаходять екстремальне значення даного функціонала, задають припустиму область відхилень проекцій узагальненого вектора струму для сталих режимів роботи перетворювача, порівнюють 1 UA 83777 U 5 10 15 20 25 30 35 40 45 50 55 60 контрольовані відхилення проекцій узагальненого вектора струму із границями допустимої для них області відхилень, причому, якщо контрольовані відхилення проекцій узагальненого вектора струму перебувають усередині припустимої області, то підтримують незмінною комбінацію відкритих і закритих силових ключів перетворювача, а якщо виходять за межі припустимої області, то задають нову комбінацію відкритих і закритих силових ключів перетворювача такою, яка відповідає знайденому екстремальному значенню першого прогнозуючого функціонала, який відрізняється тим, що при умові знаходжень контрольованих відхилень усередині припустимої області, на границях зазначеної припустимої області відхилень для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача розраховують значення другого прогнозуючого функціонала, з розрахованих значень яких знаходять екстремальне значення даного функціонала, при цьому усередині зазначеної припустимої області задають нову комбінацію силових ключів перетворювача такою, яка відповідає екстремальному значенню другого прогнозуючого функціонала. Спільними ознаками з пропонованим способом є: контроль фазної напруги мережі, фазних струмів навантаження на стороні змінного струму та напругу конденсатора на стороні постійного струму, через які визначають на осі абсцис й ординат ортогональної нерухомої координатної системи відповідно проекції вектора напруги та струму, а на осі абсцис й ординат ортогональної рухомої координатної системи прогнозовані значення проекцій вектора напруги і струму, створюваного на стороні змінного струму зазначеного перетворювача при всіх можливих комбінаціях його відкритих і закритих силових ключів, у вигляді різниці згаданих прогнозованих проекцій вектора напруги й струму обчислюють прогнозовані значення проекцій вектора напруги на відповідні осі ортогональної рухомої координатної системи при всіх можливих комбінаціях відкритих і закритих силових ключів перетворювача, контролюють відхилення між заданими й фактичними значеннями проекцій на осі ортогональної рухомої координатної системи вектора струму, створюваного на стороні змінного струму перетворювача, розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення першого прогнозуючого функціонала, з розрахованих значень якого знаходять екстремальне значення даного функціонала, задають припустиму область відхилень проекцій вектора струму для сталих режимів роботи перетворювача, порівнюють контрольовані відхилення проекцій вектора струму із границями допустимої для них області відхилень, причому, якщо контрольовані відхилення проекцій вектора струму перебувають усередині припустимої області, то підтримують незмінною комбінацію відкритих і закритих силових ключів перетворювача, а якщо виходять за межі припустимої області, то задають нову комбінацію відкритих і закритих силових ключів перетворювача такою, яка відповідає знайденому екстремальному значенню першого прогнозуючого функціонала, при умові знаходжень контрольованих відхилень усередині припустимої області, на границях зазначеної припустимої області відхилень для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача розраховують значення другого прогнозуючого функціонала, з розрахованих значень яких знаходять екстремальне значення даного функціонала, при цьому усередині зазначеної припустимої області задають нову комбінацію силових ключів перетворювача такою, яка відповідає екстремальному значенню другого прогнозуючого функціонала. Недоліком відомого способу є відсутність компенсації вищих гармонік і основної гармоніки зворотної послідовності мережевих струмів, що виключає формування відповідних складових в силовій частині перетворювача. Даний спосіб взятий як найближчий аналог. В основу корисної моделі поставлено задачу розробки прогнозуючого управління силовим активним фільтром в трифазній мережі змінного струму, шляхом розрахунку складових вектору струмів, які відповідають неактивній потужності та вищим гармонікам, їх відхилень та прогнозуючих функціоналів, забезпечити зменшення електричних втрат у перетворювачі в сталих режимах при одночасному збереженні високої швидкодії та точності регулювання струму на стороні змінного струму зазначеного перетворювача в динамічних режимах. Поставлена задача вирішується тим, що контролюють фазну напругу мережі, фазні струми навантаження на стороні змінного струму та напругу конденсатора на стороні постійного струму, через які визначають на осі абсцис й ординат ортогональної нерухомої координатної системи відповідно проекції вектора напруги та струму, а на осі абсцис й ординат ортогональної рухомої координатної системи прогнозовані значення проекцій вектора напруги і струму, створюваного на стороні змінного струму зазначеного перетворювача при всіх можливих комбінаціях його відкритих і закритих силових ключів, у вигляді різниці згаданих прогнозованих проекцій вектора напруги й струму обчислюють прогнозовані значення проекцій вектора напруги на відповідні осі ортогональної рухомої координатної системи при всіх можливих комбінаціях відкритих і 2 UA 83777 U 5 10 15 20 25 30 35 40 45 закритих силових ключів перетворювача, контролюють відхилення між заданими й фактичними значеннями проекцій на осі ортогональної рухомої координатної системи вектора струму, створюваного на стороні змінного струму перетворювача, розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення першого прогнозуючого функціонала, з розрахованих значень якого знаходять екстремальне значення даного функціонала, задають припустиму область відхилень проекцій вектора струму для сталих режимів роботи перетворювача, порівнюють контрольовані відхилення проекцій вектора струму із границями допустимої для них області відхилень, причому, якщо контрольовані відхилення проекцій вектора струму перебувають усередині припустимої області, то підтримують незмінною комбінацію відкритих і закритих силових ключів перетворювача, а якщо виходять за межі припустимої області, то задають нову комбінацію відкритих і закритих силових ключів перетворювача такою, яка відповідає знайденому екстремальному значенню першого прогнозуючого функціонала, при умові знаходжень контрольованих відхилень усередині припустимої області, на границях зазначеної припустимої області відхилень для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача розраховують значення другого прогнозуючого функціонала, з розрахованих значень яких знаходять екстремальне значення даного функціонала, при цьому усередині зазначеної припустимої області задають нову комбінацію силових ключів перетворювача такою, яка відповідає екстремальному значенню другого прогнозуючого функціонала, згідно з корисною моделлю, на підставі проекцій струму навантаження та напруги на стороні змінного струму розраховують складові активної та неактивної потужностей, виділяють неактивну потужність, яка визначається основною гармонікою струму мережі прямої послідовності, та змінні складові активної та неактивної потужностей, які визначаються гармоніками струму навантаження, відмінними від основної, і струмами основної гармоніки зворотної послідовності, розраховують задане значення струму перетворювача в нерухомій системі координат, перетворюють задане значення струму перетворювача в рухому систему координат, розраховують поточне відхилення струму в рухомій системі координат. Корисна модель пояснюється кресленнями, де на фіг. 1 (а, б) наведено алгоритм реалізації способу; на фіг. 2 наведено функціональну схему пристрою, що реалізує спосіб, яка містить: трифазний чотириквадрантний перетворювач 1, конденсатор 2, трифазну електричну мережу 3а, трифазне несиметричне навантаження 36, блок формувачів імпульсів 4, перетворювач коду 5, мультиплексор 6, перший 7 і другий 8 обчислювачі екстремального значення, перший 9 й другий 10 обчислювачі прогнозуючого функціонала, блок обчислювачів проекцій векторів 11; блок порівняння відхилень проекцій струму 12, датчик напруги 13, датчик фазних напруг 14; датчик струму фільтра 15а, датчиків струму навантаження 15б, блок визначення відхилень проекцій струму 16, блок визначення заданого струму фільтру 17, блок визначення складових потужності 18, блок визначення миттєвого струму навантаження 19, блок визначення миттєвої напруги мережі 20, шість керованих силових ключів 21-26, шунтуючі діоди 27-32, блок обчислення кута повороту вектора струму мережі 33, обчислювач проекцій вектора напруг 34, обчислювач проекцій вектора вихідної напруги 35, обчислювач проекцій результуючої напруги 36, перший 37 і другий 38 регістр. Спосіб прогнозуючого управління силовим активним фільтром в трифазній мережі змінного струму реалізується наступним чином (Фіг. 1, а, б). Під сталим режимом роботи розглянутого перетворювача слід розуміти його роботу при малих значеннях відхилень Id , Iq проекцій струму на стороні змінного струму перетворювача (які не перевищують допустимої для них області h ), а під динамічним режимом - роботу зазначеного перетворювача при відхиленнях Id , Iq проекцій струму, що перевищують 50 припустиму область відхилень. Припустиму область відхилень h проекцій вектора струму в сталих режимах задають наступними співвідношеннями: h Id h i h Iq h , (1) формують гістерезисного типу релейні функції fd й fq , знаки яких змінюються при виході відхилень проекцій за межі припустимої області згідно з полярністю відповідного відхилення Id або Iq проекції вектора струму. 55 Контролюють фазні напруги u A , uB , uC на стороні змінного струму перетворювача та передають їх на вхід обчислювача проекцій вектора напруг, який виконує перетворення: 3 UA 83777 U 1 1 1 ua 2 2 2 . (2) u 3 3 b 3 0 u 2 2 c Контролюють струми навантаження ila , ilb , ilc на стороні змінного струму перетворювача та передають їх на вхід обчислювача проекцій вектора струму, який виконує перетворення: u u 1 1 u 1 2 2 la 2 u . (3) 3 3 lb 3 0 u 2 2 lc Розраховують кут повороту вектора струму мережі: i arctg l , (4) il де il , il проекції вектора миттєвого струму мережі змінного струму навантаження на осі ul ul 5 10 нерухомої ортогональної координатної системи " " . Формують тригонометричні функції cos , sin від аргументу ортогональної обертової координатної системи " d q" . Переходять від нерухомої системи координат " " до обертової " d q" перерахунком: u d cos sin u , (5) u q sin cos u де проекції u d і u q вектора напруг U u d ju q на осі абсцис " d" й ординат " q" " 15 20 25 ортогональної обертової координатної системи " d q" , u , u - проекції вектора миттєвої напруги мережі змінного струму U на осі нерухомої ортогональної координатної системи " " ; j - мнима одиниця. Визначають миттєву активну і реактивну потужності навантаження співвідношенням: pl u u il , (6) u ql u il Розділяють миттєві активну і реактивну потужності на дві складові: постійну (середню, шляхом інтегрування) та змінну: ~ pl Pl pl , (7) ql Ql ~l . (8) q Корисною складовою приймають тільки постійну активну потужність Pl , з урахуванням, що в трифазній симетричній системі напруг в сталому режимі постійні складові активної Pl і реактивної Q l потужності визначаються основною гармонікою струму мережі прямої ~ послідовності, а змінні складові p і ~ визначаються гармоніками струму навантаження, q l l ~ відмінними від основної, і струмами основної гармоніки зворотній послідовності, виділяють pl , ql . Визначають заданий струм компенсатора в нерухомій системі координат " " : 30 ~ u p . (9) u l ql Контролюють струми компенсатора ika , ikb , ikc на стороні змінного струму перетворювача та передають їх на вхід обчислювача проекцій вектора струму, який виконує перетворення: i* 1 k 2 * ik (u2 u ik ik u u 1 1 2 2 3 3 0 2 1 i ka 2 . (10) ikb 3 i 2 kc 4 UA 83777 U Виконують перетворення вектора струму компенсатора із системи координат " " до обертової ортогональної системи координат " d q" за співвідношенням: 5 Ikd cos sin ul . (11) Ikq sin cos ul Контролюють напругу UDC на стороні постійного струму перетворювача. Обчислюють проекції вихідної напруги відповідно до таблиці 1 та можливих комбінацій відкритих і закритих станів силових ключів перетворювача. Таблиця 1 Номер комбінації m 21 1 1 0 0 0 1 1 0 1 2 3 4 5 6 7 8 10 Наявність імпульсів керування, що відкривають силові ключі 22 23 24 25 0 0 1 0 0 1 0 0 1 1 0 0 1 1 0 1 1 0 1 1 0 0 1 1 0 1 0 1 1 0 1 0 26 1 1 1 0 0 0 0 1 U (m) U (m) +Udc +Udc/2 -Udc/2 -Udc -Udc/2 +Udc/2 0 0 0 +√3Udc/2 +√3Udc/2 0 -√3Udc/2 -√3Udc/2 0 0 Умовні номери комбінацій відкритих (показані цифрою 1) і закритих силових ключів чотириквадрантного перетворювача (показані цифрою 0). Визначають прогнозовані значення проекцій Ud (m) , Uq (m) вектора напруги U(m) Ud (m) jU q (m) , створюваного на стороні змінного струму перетворювача при даних можливих комбінаціях його відкритих і закритих силових ключів, виходячи з прогнозованих значень (згідно з табл. 1) проекцій вектора вихідної напруги U (m) , U (m) на осі нерухомої 15 ортогональної координатної системи " " , з використанням наступних співвідношень: Ud (m) cos sin U (m) , (12) Uq (m) sin cos U (m) m 12...8. , Розраховують у вигляді різниці прогнозованих проекцій Ud (m) , Uq (m) вектора напруги U(m) проекцій u d , u q вектора напруги мережі U прогнозовані значення проекцій Ud (m) , 20 Uq(m) результуючого вектора напруги U(m) при всіх можливих комбінаціях відкритих і закритих силових ключів перетворювача: Ud (m) Ud (m) ud , Uq (m) Uq (m) uq . 25 * * Контролюють відхилення Id , Iq між заданими Ikd , Ikq й фактичними Id , Iq значеннями проекцій (на осі зазначеної ортогональної обертової координатної системи " d q" ) вектора струму I : Id I* Id , d Iq I* Iq . q . (14) Через обчислені проекції Ud (m) , Uq (m) (13) прогнозуючого вектора результуючої напруги 30 й через контрольовані відхилення Id , Iq (14) проекцій струму розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення F1(m) першого прогнозуючого функціонала: 5 UA 83777 U F1(m) K1fq Uq (m), K1 1 sign fd Uq (m) , , (15) де fd , fq - гістерезисного типу релейні функції в від відхилень проекцій струму (14). З 5 10 розрахованих значень F1(m) першого прогнозуючого функціонала знаходять 0 екстремальне значення F1 даного функціонала у вигляді його максимуму, яке відповідає швидкодіючому регулюванню струму на стороні змінного струму перетворювача у динамічних режимах його роботи: 0 F1 max{ F1(m)} при m m1 , (16) де m й m1 - відповідно можлива й відповідна екстремальному значенню функціонала комбінація відкритих і закритих силових ключів перетворювача. Задають припустиму область (яка характеризується границею h ) відхилень вектора струму на стороні змінного струму перетворювача, що відповідає сталим роботи цього перетворювача, з якою порівнюють контрольовані відхилення Id , Iq першого проекцій режимам проекцій вектора струму I . Причому, якщо контрольовані відхилення Id , Iq проекцій вектора струму виходять за межі припустимої області задають значення m* m1 комбінації відкритих і закритих 15 0 силових ключів перетворювача таким, яке відповідає знайденому екстремальному значенню F1 першого прогнозуючого функціонала й забезпечує, швидкодіюче регулювання струму на стороні змінного струму перетворювача у динамічних режимах його роботи. Якщо по закінченні динамічного режиму регулювання струму на стороні змінного струму перетворювача хоча б одне з контрольованих відхилень Id , Iq проекцій струму досягає 20 границі припустимої області відхилень, то установлюють значення Ud0 (m) , Uq0 (m) , що відповідають значенням проекцій Ud (m) , Uq (m) прогнозованих результуючих векторів напруги на границі припустимої області відхилень h , установлюють значення Id0 , Iq0 відхилень Id , Iq проекцій струму, які також відповідають (належать) границям припустимої області відхилень h відповідно до співвідношення: 25 Ud0 (m) t Id Id0 L ф . (17) I I Uq0 (m) t q0 q Lф Розраховують для всіх можливих комбінацій (m 12,... 8 відкритих і закритих силових ключів , перетворювача значення F2 (m) другого прогнозуючого функціонала, задаючи наступні залежності: F2 (m) min F2d (m),F2q (m) Id0 signUd0 (m)h , (18) F2d (m) Ud0 (m) I sign Uq0 (m) h F2q (m) q0 Uq0 (m) 0 з яких знаходять екстремальне значення F2 даного функціонала, що відповідає мінімально можливій частоті перемикань силових ключів перетворювача для сталих режимів його роботи й досягається при комбінації т2 відкритих і закритих силових ключів перетворювача: 30 35 0 F2 min F2 (m) при m m2 , (19) де m2 - відповідна екстремальному значенню другого функціоналу комбінація відкритих та закритих силових ключів перетворювача. Після входження відхилень Id , Iq проекцій струму усередину припустимої області відхилень h (яка відповідає сталому режиму роботи перетворювача) у задають комбінацію m * 6 UA 83777 U 5 10 15 20 25 30 35 40 45 50 55 відкритих і закритих силових ключів перетворювача рівної згаданому значенню m2 , яке 0 відповідає екстремальному значенню F2 другого прогнозуючого функціонала й забезпечує мінімально можливу частоту перемикання силових ключів цього перетворювача в сталих режимах його роботи. Варіант реалізації способу, наведений на фіг. 2, містить: трифазний чотириквадрантний перетворювач 1, підключений стороною постійного струму (із клемами «+» й «-») до конденсатора 2, а стороною змінного струму через індуктивності L ф (із клемами "а", "b" й "с") до трифазної електричної мережі 3а, паралельно до трифазної електричної мережі 3а підключене трифазне несиметричне навантаження 3б; блок формувачів імпульсів 4; перетворювач коду 5; мультиплексор 6; перший 7 і другий 8 обчислювачі екстремального значення; перший 9 й другий 10 обчислювачі прогнозуючого функціонала; блок обчислювачів проекцій векторів 11; блок порівняння відхилень проекцій струму 12; датчики напруги 13 і фазних напруг 14; блок датчиків струму фільтра 15а, блок датчиків струму навантаження 15б, блок визначення відхилень проекцій струму 16, блок визначення заданого струму фільтра 17, блок визначення складових потужності 18, блок визначення миттєвого струму навантаження 19, блок визначення миттєвої напруги мережі 20. При цьому трифазний чотириквадрантний перетворювач 1 складається із шести керованих силових ключів 21-26, що шунтуються зворотними діодами 27-32. Трифазна електрична мережа 3а показана на Фіг. 2 у вигляді еквівалентної схеми заміщення, що містить у своєму складі джерела E A , EB , EC змінного струму, індуктивності L й активні опори R . Трифазне несиметричне навантаження 3б показано у вигляді еквівалентної схеми заміщення, що містить у своєму складі джерела EA1 , EB1 , EC1 змінного струму, індуктивності LH й активні опори RH , які мають нелінійні характеристики. Блок обчислювачів проекцій векторів 11 складається із блока обчислення кута повороту вектора струму мережі 33, обчислювача проекцій вектора напруг 34, обчислювача проекцій вектора вихідної напруги 35, обчислювача проекцій результуючої напруги 36, першого 37 і другого 38 регістрів. Блок обчислення кута повороту вектора струму мережі 33 приєднаний своїм виходом до одного із входів 2 обчислювача проекцій вектора напруг 34 й до входу 1 обчислювача проекцій вихідної напруги 35, вихід обчислювача проекцій вихідної напруги 35 І вихід обчислювача проекцій вектора напруг 34 підключені відповідно до другого 2 й першого 1 входів обчислювача проекцій результуючої напруги 36, у якого вихід є входом 4 блока 11 і з'єднаний із входом 2 регістра 32, а вихід 3 регістра 32 є другим виходом 3 блока 11. Вхід 1 блока обчислення кута повороту вектора струму мережі 28 з'єднаний з виходом 1 блока датчика струму навантаження 35. Керуючі входи 1 й 2 першого 37 і другого 38 регістрів з'єднані разом і пов'язані з входом 6 блока 11, причому вихід другого регістра 38 є виходом 5 блока 11, вхід 2 обчислювача проекцій вихідної напруги 35 й вхід 1 обчислювача проекцій вектора напруг 34 є відповідно третім 3, другим 2 і першим 1 входами блока 11. При цьому блок визначення відхилень проекцій струму 16 з'єднаний своїм виходом із входом 1 регістра 38, входом 1 першого обчислювача прогнозуючого функціонала 9 і з входом 1 блока порівняння відхилень проекцій струму 12, у якого один з виходів 1 підключений до керуючого входу 3 мультиплексора 6, а другий вихід 2 до входу 6 блока обчислювачів проекцій векторів 11. У першого обчислювача прогнозуючого функціонала 9 другий вхід 2 приєднаний до виходу 4 блока обчислювачів 11, а вихід підключений через перший обчислювач екстремального значення 7 до входу 2 мультиплексора 6, вихід якого з'єднаний з перетворювач коду 5, а виходи перетворювач коду 5 з блоком формувачів імпульсів 4, виходи яких з'єднані з керуючими входами чотириквадрантного перетворювача 1. Вхід 2 блока обчислювачів 11 з'єднаний з виходом датчика напруги 13, підключеного до конденсатора 2 чотириквадрантного перетворювача 1, а вихід датчика фазних напруг 14 з'єднаний з входом 1 блока обчислювачів 11. У другого обчислювача прогнозуючого функціонала 10 входи 1 і 2 з'єднані відповідно із 5 і 2 виходами блока обчислювачів 11, а вихід другого обчислювача прогнозуючого функціонала 10 з'єднаний з входом другого обчислювача екстремального значення 8, вихід другого обчислювача екстремального значення 8 з'єднаний з входом 1 мультиплексора 6. Вихід датчика струму фільтра 15а підключений до входу 3 блока визначення відхилень проекцій струму 16. Вихід 2 блока обчислення кута повороту вектора струму мережі 33 з'єднаний з входом 2 блока визначення відхилень проекцій струму 16. Вхід 1 блока визначення відхилень проекцій струму 16 з'єднаний з виходом блока визначення заданого струму фільтра 17. Входи 1 і 2 блока визначення заданого струму фільтра 17 з'єднані відповідно з виходом блока визначення складових потужності 18 і виходом блока визначення миттєвого струму навантаження 19. Вихід блока визначення миттєвого струму навантаження 19 з'єднаний з входом 2 блока визначення 7 UA 83777 U 5 складових потужності 18. Вихід датчика струму навантаження 156 з'єднаний з входом блока визначення миттєвого струму навантаження 19. Вихід датчика фазних напруг 14 з'єднаний з входом блока визначення миттєвої напруги мережі 20. Вихід блока визначення миттєвої напруги мережі 20 з'єднаний з входом 1 блока визначення складових потужності 18. Таким чином, спосіб дозволяє реалізувати прогнозуюче управління силовим активним фільтром в трифазній мережі змінного струму. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 25 30 35 40 45 Спосіб прогнозуючого управління силовим активним фільтром в трифазній мережі змінного струму, який полягає в тому, що контролюють фазну напругу мережі, фазні струми навантаження на стороні змінного струму та напругу конденсатора на стороні постійного струму, через які визначають на осі абсцис й ординат ортогональної нерухомої координатної системи відповідно проекції вектора напруги та струму, а на осі абсцис й ординат ортогональної рухомої координатної системи прогнозовані значення проекцій вектора напруги і струму, створюваного на стороні змінного струму зазначеного перетворювача при всіх можливих комбінаціях його відкритих і закритих силових ключів, у вигляді різниці згаданих прогнозованих проекцій вектора напруги й струму обчислюють прогнозовані значення проекцій вектора напруги на відповідні осі ортогональної рухомої координатної системи при всіх можливих комбінаціях відкритих і закритих силових ключів перетворювача, контролюють відхилення між заданими й фактичними значеннями проекцій на осі ортогональної рухомої координатної системи вектора струму, створюваного на стороні змінного струму перетворювача, розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення першого прогнозуючого функціонала, з розрахованих значень якого знаходять екстремальне значення даного функціонала, задають припустиму область відхилень проекцій вектора струму для сталих режимів роботи перетворювача, порівнюють контрольовані відхилення проекцій вектора струму із границями допустимої для них області відхилень, причому, якщо контрольовані відхилення проекцій вектора струму перебувають усередині припустимої області, то підтримують незмінною комбінацію відкритих і закритих силових ключів перетворювача, а якщо виходять за межі припустимої області, то задають нову комбінацію відкритих і закритих силових ключів перетворювача такою, яка відповідає знайденому екстремальному значенню першого при умові знаходжень контрольованих відхилень усередині припустимої області, на границях зазначеної припустимої області відхилень для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача розраховують значення другого прогнозуючого функціонала, з розрахованих значень яких знаходять екстремальне значення даного функціонала, при цьому усередині зазначеної припустимої області задають нову комбінацію силових ключів перетворювача такою, яка відповідає екстремальному значенню другого прогнозуючого функціонала, який відрізняється тим, що на підставі проекцій струму навантаження та напруги на стороні змінного струму розраховують складові активної та неактивної потужностей, виділяють неактивну потужність, яка визначається основною гармонікою струму мережі прямої послідовності, та змінні складові активної та неактивної потужностей, які визначаються гармоніками струму навантаження, відмінними від основної, і струмами основної гармоніки зворотної послідовності, розраховують задане значення струму перетворювача в нерухомій системі координат, перетворюють задане значення струму перетворювача в рухому систему координат, розраховують поточне відхилення струму в рухомій системі координат. 8 UA 83777 U 9 UA 83777 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Автори англійськоюBialobrezhskyi Oleksii Volodymyrovych
Автори російськоюБялобржеский Алексей Владимирович
МПК / Мітки
МПК: H02P 7/00, H02P 21/00
Мітки: управління, фільтром, змінного, струму, трифазній, прогнозуючого, мережі, спосіб, силовим, активним
Код посилання
<a href="https://ua.patents.su/12-83777-sposib-prognozuyuchogo-upravlinnya-silovim-aktivnim-filtrom-v-trifaznijj-merezhi-zminnogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Спосіб прогнозуючого управління силовим активним фільтром в трифазній мережі змінного струму</a>
Спосіб керування силовим активним фільтром постійного струму з паралельним підключенням інвертора напруги
Номер патенту: 72104
Опубліковано: 10.08.2012
Автор: Зубенко Василь Анатолійович
МПК: H02M 1/15
Мітки: паралельним, керування, спосіб, фільтром, постійного, силовим, активним, струму, підключенням, інвертора, напруги
Формула / Реферат:
Спосіб керування силовим активним фільтром постійного струму з паралельним включенням інвертора напруги, який відрізняється тим, що вимірюють напругу пульсацій на виході випрямляча, напругу та струм в паралельній гілці фільтра та струм в послідовній гілці, розраховують напругу на послідовній гілці, визначають комплексний опір гілок фільтра на частоті і-ої гармоніки та розраховують вихідну напругу компенсації інвертора на частоті і-ої...
Спосіб захисту від однофазних замикань на землю в трифазній мережі змінного струму і пристрій для його реалізації
Номер патенту: 78119
Опубліковано: 15.02.2007
Автори: Сабарно Людмила Ростиславівна, Кошман Всеволод Іванович, Трач Ігор Васильович, Кузнецов Володимир Григорович, Севастюк Ігор Михайлович
МПК: H02H 3/17
Мітки: однофазних, землю, пристрій, змінного, мережі, струму, захисту, спосіб, трифазній, замикань, реалізації
Формула / Реферат:
1. Спосіб захисту від однофазних замикань на землю у трифазній мережі змінного струму, який включає виділення першої півхвилі високочастотної складової з сигналу струму нульової послідовності першого приєднання, вимірювання амплітуди першої півхвилі сигналу високочастотної складової струму нульової послідовності першого приєднання, виділення і вимірювання амплітуди сигналу напруги нульової послідовності на робочій частоті, після чого -...
Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача
Номер патенту: 30472
Опубліковано: 25.02.2008
Автори: Волков Олександр Васильович, Волков Володимир Олександрович
МПК: H02P 21/00, H02P 7/00
Мітки: змінного, струму, перетворювача, трифазного, векторного, регулювання, чотириквадрантного, стороні, спосіб
Формула / Реферат:
1. Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача, що полягає в тому, що контролюють фазні електрорушійну силу (ЕРС) на стороні змінного струму й напругу на стороні постійного струму цього перетворювача, через які визначають на осі абсцис і ординат ортогональної координатної системи відповідно проекції узагальненого вектора ЕРС і прогнозовані значення проекцій узагальненого вектора...
Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача
Номер патенту: 44892
Опубліковано: 26.10.2009
Автори: Антонов Микола Леонідович, Волков Олександр Васильович, Волков Володимир Олександрович
МПК: H02P 7/00, H02P 21/00
Мітки: струму, чотириквадрантного, стороні, трифазного, перетворювача, спосіб, регулювання, векторного, змінного
Формула / Реферат:
1. Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача, який полягає в тому, що контролюють фазні електрорушійні сили (ЕРС) на стороні змінного струму й напругу на стороні постійного струму цього перетворювача, через які визначають на осі абсцис й ординат ортогональної координатної системи відповідно проекції узагальненого вектора ЕРС та прогнозовані значення проекцій узагальненого...
Спосіб виявлення пошкодження в мережі змінного струму
Номер патенту: 27421
Опубліковано: 15.09.2000
Автори: Сабадаш Ігор Олександрович, Шелепетень Теодор Михайлович
МПК: H02H 3/08, H03K 17/56
Мітки: пошкодження, струму, виявлення, мережі, спосіб, змінного
Текст:
...раніше, ніж струм досягне амплітудного значення. Похідна струму і = l m s i n C t, де l m O амплітудне значення, в момент t 0 d. дорівнює — = colm , а його амплітудне значення d t в цей момент дорівнює похідній, поділеній на постійне число - колову частоту со , тобто CM о CM CM 27421 Тут необхідно врахувати t-o ще й те, що значення \ т буде визначено з мінімальною похибкою що вноситься трансформатором струму, тому, що в момент...
Попередній патент: Пристрій обліку питомих енерговитрат промислового підприємства
Наступний патент: Пристрій для регулювання тягового електротехнічного комплексу
Випадковий патент: Машина для вирівнювання деталей взуття по товщині