Пристрій і спосіб укладання контейнерів стискуваного типу в розподільний вузол

Формула / Реферат
1. Пристрій для укладання наповнених і запечатаних контейнерів (2) стискуваного типу в розподільний вузол (3), при цьому контейнери переміщуються в положення (В) упаковування, в якому контейнери (2) підвішені і розташовані вздовж горизонтальної поздовжньої осі (А1), який містить
захоплювальний вузол (6) з великою кількістю пар (14) пальців, які відповідають кількості контейнерів (2) в положенні (В) упаковування, при цьому кожна пара (14) пальців, в незахоплювальному стані захоплювального вузла (6), має зазор (17) між пальцями, який забезпечує проходження контейнера (2),
при цьому захоплювальний вузол (6) виконаний з можливістю переведення в захоплювальний стан, в якому кожна пара (14) пальців виконана з можливістю виконання стискаючого переміщування для захоплення контейнера (2) з таким зусиллям стиснення, що вміст контейнера (2) утворює внутрішню структуру протитиску для забезпечення чіткого захоплення.
2. Пристрій за п. 1, в якому захоплювальний вузол (6) виконаний з можливістю переміщування між положенням захоплення і положенням укладання, при цьому в положенні захоплення захоплювальний вузол виконаний з можливістю захоплення контейнерів (2) в положенні (В) упаковування за допомогою переведення захоплювального вузла (6) в його захоплювальний стан, а в положенні укладання захоплювальний вузол (6) виконаний з можливістю укладання захоплених контейнерів (2) в розподільний вузол (3).
3. Пристрій за одним з пп. 1 або 2, в якому захоплювальний вузол (6) виконаний з можливістю переміщування вздовж осі (A3) переміщування, яка перпендикулярна поздовжній осі (А1), при цьому захоплювальний вузол (6) виконаний з можливістю переміщування між положенням захоплення і положенням укладання за допомогою переміщування вздовж осі (A3) переміщування.
4. Пристрій за будь-яким з пп. 1-3, в якому захоплювальний вузол (6) виконаний з можливістю повороту навколо осі (А2) повороту, яка паралельна поздовжній осі (А1).
5. Пристрій за п. 4, в якому захоплювальний вузол (6) виконаний з можливістю переміщування вздовж осі (A3) переміщування, яка перпендикулярна осі (А2) повороту і яка співпадає з площиною, утвореною поздовжньою віссю (А1) і віссю (А2) повороту, при цьому захоплювальний вузол (6) виконаний з можливістю переміщування між положенням захоплення і положенням укладання за допомогою повороту навколо осі (А2) повороту і переміщування вздовж осі (A3) переміщування.
6. Пристрій за будь-яким з пп. 1-5, в якому захоплювальний вузол (6) в його положенні захоплення виконаний з можливістю захоплення контейнерів (2) в положенні (В) упаковування тільки з однієї сторони (18, 19) контейнера.
7. Пристрій за п. 6, що додатково містить робочий елемент, виконаний з можливістю повороту розподільного вузла (коробки) (3) на 180° кожного разу, коли захоплювальний вузол (6) поклав контейнери (2) в розподільний вузол (3).
8. Пристрій за будь-яким з пп. 1-5, в якому захоплювальний вузол (6) в його положенні захоплення виконаний з можливістю захоплення контейнерів (2) в положенні (В) упаковування почергово з першої сторони (18) контейнера і другої (19) сторони контейнера.
9. Пристрій за будь-яким з пп. 1-8, в якому захоплювальний вузол (6) виконаний з можливістю захоплення контейнерів (2) групами (G1, G2) щонайменше з двох контейнерів (2).
10. Пристрій за будь-яким з пп. 1-9, в якому захоплювальний вузол (6) містить задній елемент (13) для підтримування всіх пар (14) пальців.
11. Пристрій за п. 10, в якому задній елемент (13) підтримує щонайменше дві пари (14) пальців, причому пари (14) пальців виконані з можливістю переміщування один відносно одного між стисненим разом станом і відокремленим станом.
12. Пристрій за одним з пп. 10 або 11, в якому захоплювальний вузол (6) виконаний з можливістю повороту навколо осі (А2) повороту, яка паралельна поздовжній осі (А1), і переміщування вздовж осі (A3) переміщування, яка перпендикулярна осі (А2) повороту і співпадає з площиною, утвореною поздовжньою віссю (А1) і віссю (А2) повороту, при цьому він додатково містить поворотний двигун (9), який виконаний з можливістю переміщування паралельно осі (A3) переміщування, причому захоплювальний вузол (6) підтримується з можливістю повороту поворотним двигуном (9) для повороту навколо осі (А2) повороту.
13. Пристрій за п. 12, в якому захоплювальний вузол (6) підтримується поворотним двигуном (9) за допомогою важеля (10), який проходить перпендикулярно осі (А2) повороту і який на першому кінці (11) приєднаний до поворотного двигуна (9), а на другому кінці (12) до заднього елемента (13).
14. Пристрій за п. 13, в якому задній елемент (13) шарнірно з'єднаний з другим кінцем (12) важеля (10).
15. Пристрій за будь-яким з пп. 1-14, що додатково містить робочий елемент, виконаний з можливістю почергового зміщення в бічному напрямку розподільного вузла (3) у взаємно протилежних напрямках перед кожним укладанням контейнерів (2) в розподільний вузол (3).
16. Пристрій за будь-яким з пп. 1-15, в якому пристрій утворює модуль, виконаний з можливістю приєднання до наповнювальної машини для наповнення контейнерів (2) стискуваного типу.
17. Пристрій за будь-яким з пп. 1-15, в якому пристрій виконаний за одне ціле з наповнювальною машиною для наповнення контейнерів (2) стискуваного типу.
18. Спосіб укладання наповнених і запечатаних контейнерів (2) стискуваного типу в розподільний вузол (3), при цьому контейнери (2) переміщують в положення (В) упаковування підвішеними і розташованими вздовж поздовжньої осі (А1), який містить
захоплення за допомогою стискаючого переміщування, з однієї з першої і другої сторони (18, 19) контейнера, контейнерів (2) в положенні (В) упаковування один за одним,
при цьому кожний контейнер (2) захоплюють з таким зусиллям стиснення, що вміст контейнера (2) утворює внутрішню структуру протитиску для забезпечення чіткого захоплення.
19. Спосіб за п. 18, який додатково містить поворот захоплених контейнерів (2) навколо осі (А2) повороту так, що інша з першої і другої сторони (18, 19) контейнера орієнтована вниз, при цьому вісь (А2) повороту паралельна поздовжній осі (А1) і розташована у вертикальній площині, що містить поздовжню вісь (А1),
переміщування захоплених контейнерів (2) у вертикальному напрямку вниз,
укладання захоплених контейнерів (2) в розподільний вузол (3) за допомогою відпускання їх, і
подальше повторення процесу доти, поки розподільний вузол (3) не буде заповнений контейнерами (2).
20. Спосіб за одним з пп. 18 або 19, в якому контейнери (2) в положенні (В) упаковування захоплюють тільки з першої сторони (18) контейнера.
21. Спосіб за п. 20, в якому етап повороту розподільного вузла (3) на 180° виконують перед етапом укладання захоплених контейнерів (2) в розподільний вузол (3).
22. Спосіб за одним з пп. 18 або 19, в якому контейнери (2) в положенні (В) упаковування почергово захоплюють з першої сторони (18) контейнера і другої сторони (19) контейнера.
23. Спосіб за п. 22, в якому етап зміщення в бічному напрямку захоплених контейнерів (2) відносно розподільного вузла (3) виконують перед етапом укладання захоплених контейнерів (2) в розподільний вузол (3).
Текст
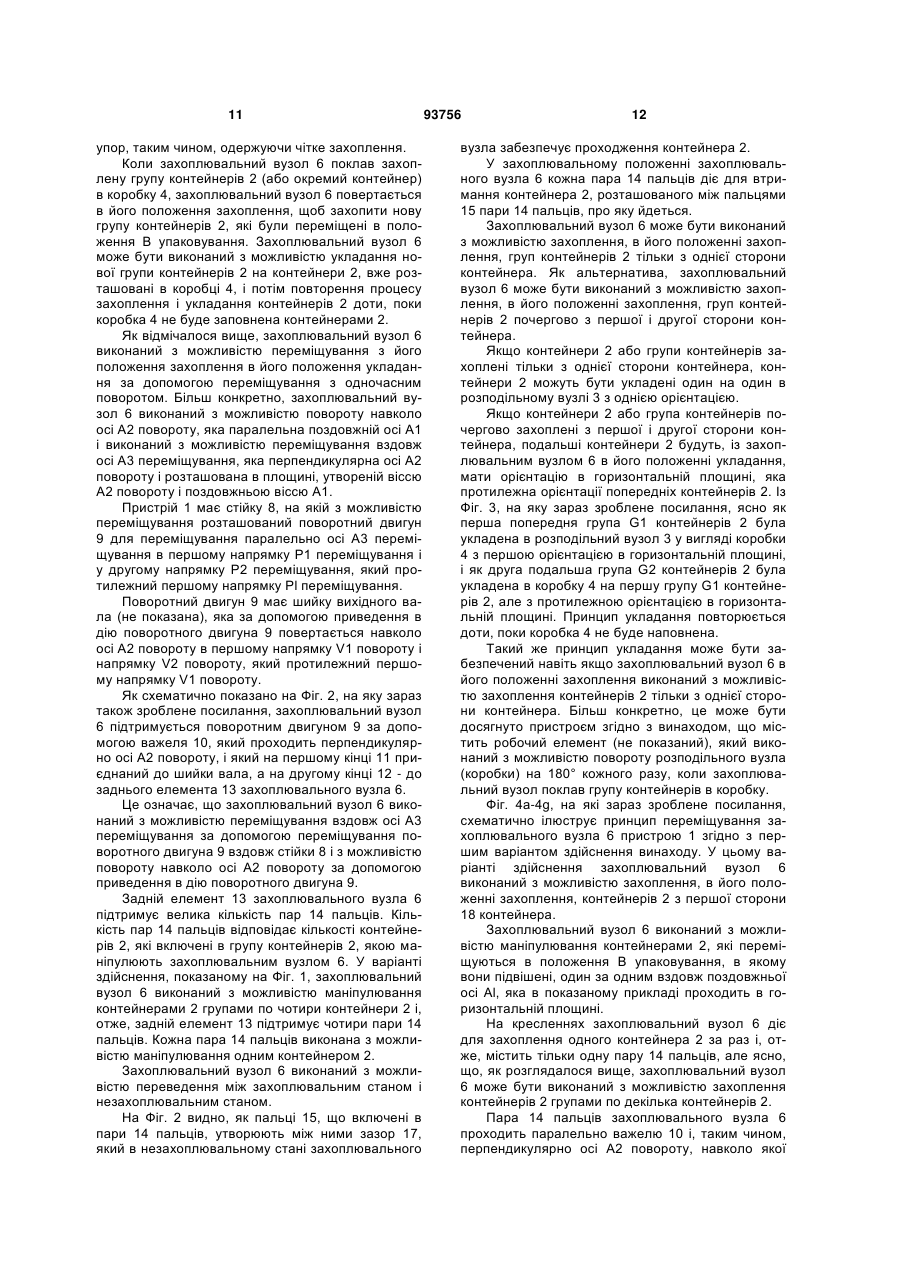
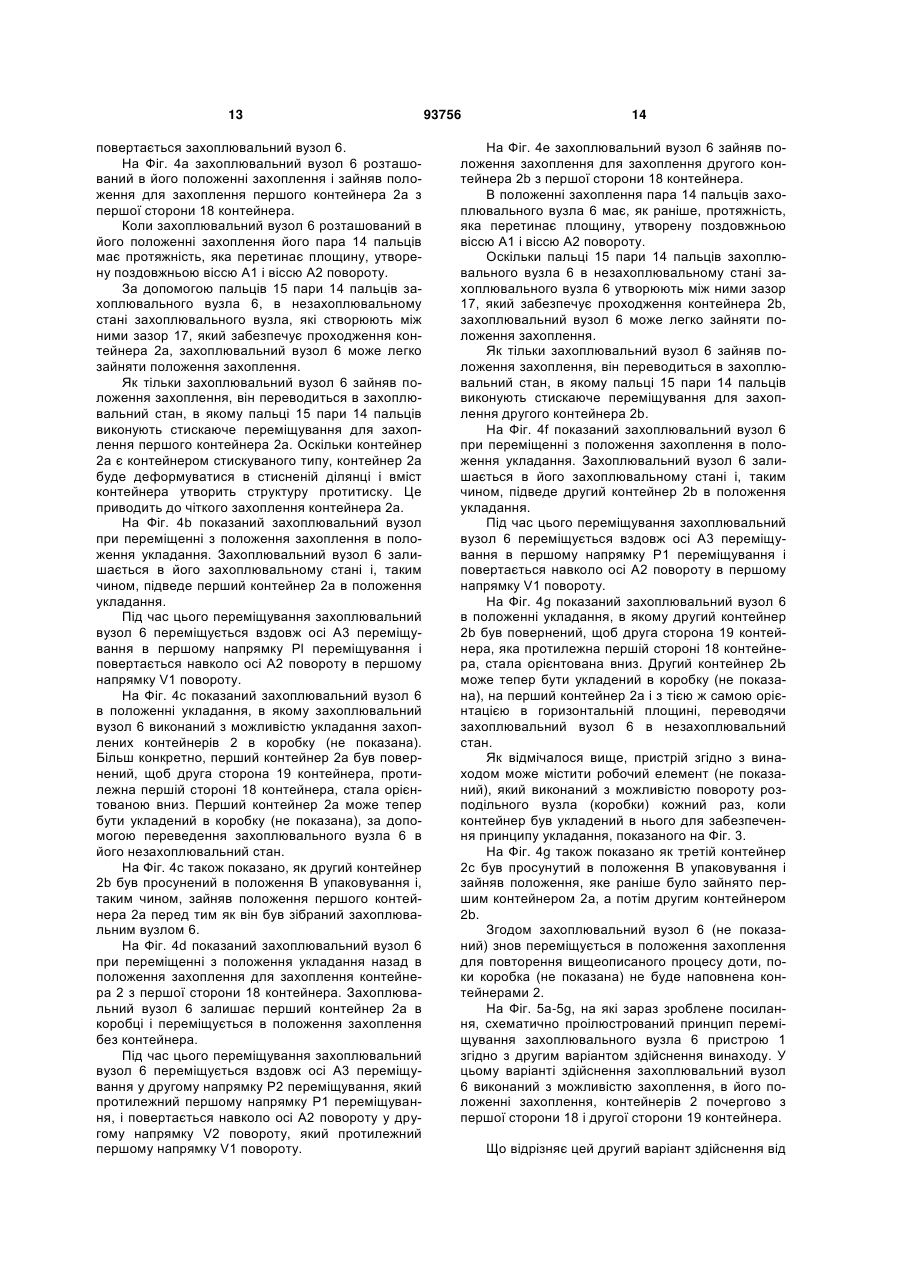
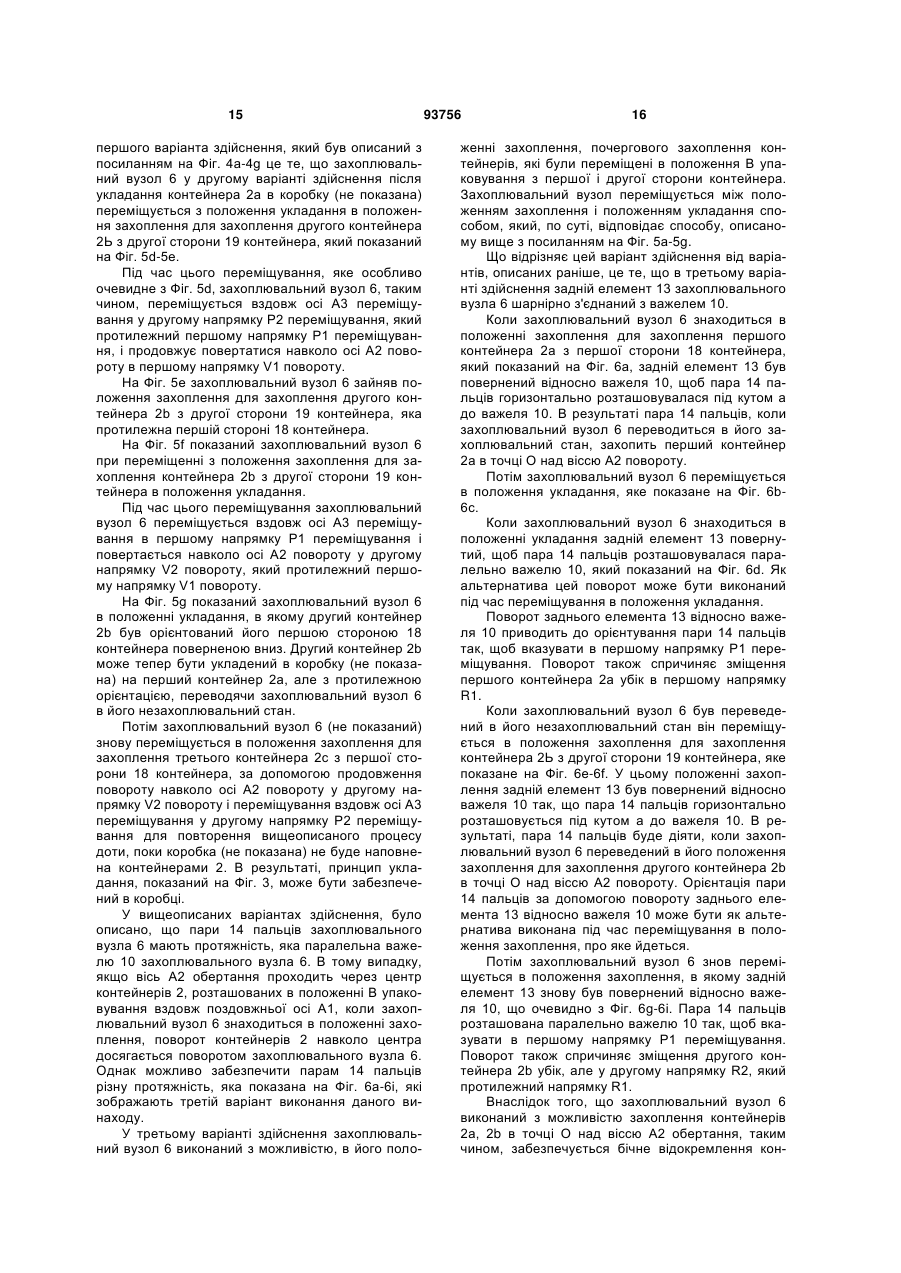
1. Пристрій для укладання наповнених і запечатаних контейнерів (2) стискуваного типу в розподільний вузол (3), при цьому контейнери переміщуються в положення (В) упаковування, в якому контейнери (2) підвішені і розташовані вздовж горизонтальної поздовжньої осі (А1), який містить захоплювальний вузол (6) з великою кількістю пар (14) пальців, які відповідають кількості контейнерів (2) в положенні (В) упаковування, при цьому кожна пара (14) пальців, в незахоплювальному стані захоплювального вузла (6), має зазор (17) між пальцями, який забезпечує проходження контейнера (2), при цьому захоплювальний вузол (6) виконаний з можливістю переведення в захоплювальний стан, в якому кожна пара (14) пальців виконана з можливістю виконання стискаючого переміщування для захоплення контейнера (2) з таким зусиллям стиснення, що вміст контейнера (2) утворює внутрішню структуру протитиску для забезпечення чіткого захоплення. 2. Пристрій за п. 1, в якому захоплювальний вузол (6) виконаний з можливістю переміщування між положенням захоплення і положенням укладання, при цьому в положенні захоплення захоплювальний вузол виконаний з можливістю захоплення контейнерів (2) в положенні (В) упаковування за допомогою переведення захоплювального вузла (6) в його захоплювальний стан, а в положенні укладання захоплювальний вузол (6) виконаний з можливістю укладання захоплених контейнерів (2) в розподільний вузол (3). 2 (19) 1 3 93756 4 чому пари (14) пальців виконані з можливістю переміщування один відносно одного між стисненим разом станом і відокремленим станом. 12. Пристрій за одним з пп. 10 або 11, в якому захоплювальний вузол (6) виконаний з можливістю повороту навколо осі (А2) повороту, яка паралельна поздовжній осі (А1), і переміщування вздовж осі (A3) переміщування, яка перпендикулярна осі (А2) повороту і співпадає з площиною, утвореною поздовжньою віссю (А1) і віссю (А2) повороту, при цьому він додатково містить поворотний двигун (9), який виконаний з можливістю переміщування паралельно осі (A3) переміщування, причому захоплювальний вузол (6) підтримується з можливістю повороту поворотним двигуном (9) для повороту навколо осі (А2) повороту. 13. Пристрій за п. 12, в якому захоплювальний вузол (6) підтримується поворотним двигуном (9) за допомогою важеля (10), який проходить перпендикулярно осі (А2) повороту і який на першому кінці (11) приєднаний до поворотного двигуна (9), а на другому кінці (12) до заднього елемента (13). 14. Пристрій за п. 13, в якому задній елемент (13) шарнірно з'єднаний з другим кінцем (12) важеля (10). 15. Пристрій за будь-яким з пп. 1-14, що додатково містить робочий елемент, виконаний з можливістю почергового зміщення в бічному напрямку розподільного вузла (3) у взаємно протилежних напрямках перед кожним укладанням контейнерів (2) в розподільний вузол (3). 16. Пристрій за будь-яким з пп. 1-15, в якому пристрій утворює модуль, виконаний з можливістю приєднання до наповнювальної машини для наповнення контейнерів (2) стискуваного типу. 17. Пристрій за будь-яким з пп. 1-15, в якому пристрій виконаний за одне ціле з наповнювальною машиною для наповнення контейнерів (2) стискуваного типу. 18. Спосіб укладання наповнених і запечатаних контейнерів (2) стискуваного типу в розподільний вузол (3), при цьому контейнери (2) переміщують в положення (В) упаковування підвішеними і розташованими вздовж поздовжньої осі (А1), який містить захоплення за допомогою стискаючого переміщування, з однієї з першої і другої сторони (18, 19) контейнера, контейнерів (2) в положенні (В) упаковування один за одним, при цьому кожний контейнер (2) захоплюють з таким зусиллям стиснення, що вміст контейнера (2) утворює внутрішню структуру протитиску для забезпечення чіткого захоплення. 19. Спосіб за п. 18, який додатково містить поворот захоплених контейнерів (2) навколо осі (А2) повороту так, що інша з першої і другої сторони (18, 19) контейнера орієнтована вниз, при цьому вісь (А2) повороту паралельна поздовжній осі (А1) і розташована у вертикальній площині, що містить поздовжню вісь (А1), переміщування захоплених контейнерів (2) у вертикальному напрямку вниз, укладання захоплених контейнерів (2) в розподільний вузол (3) за допомогою відпускання їх, і подальше повторення процесу доти, поки розподільний вузол (3) не буде заповнений контейнерами (2). 20. Спосіб за одним з пп. 18 або 19, в якому контейнери (2) в положенні (В) упаковування захоплюють тільки з першої сторони (18) контейнера. 21. Спосіб за п. 20, в якому етап повороту розподільного вузла (3) на 180° виконують перед етапом укладання захоплених контейнерів (2) в розподільний вузол (3). 22. Спосіб за одним з пп. 18 або 19, в якому контейнери (2) в положенні (В) упаковування почергово захоплюють з першої сторони (18) контейнера і другої сторони (19) контейнера. 23. Спосіб за п. 22, в якому етап зміщення в бічному напрямку захоплених контейнерів (2) відносно розподільного вузла (3) виконують перед етапом укладання захоплених контейнерів (2) в розподільний вузол (3). Даний винахід стосується пристрою і способу укладання вдосконалених, наповнених і запечатаних контейнерів в розподільний вузол і, більш конкретно, пристрою і способу маніпулювання контейнерами стискуваного типу, які підвішені і розташовані один за одним вздовж поздовжньої осі. У харчовій промисловості, контейнери які були наповнені і запечатані в наповнювальній машині звичайно подаються до стрічки транспортера для подальшого транспортування до пристрою упаковування контейнерів. Упаковка може містити, наприклад, укладання контейнерів в розподільний вузол, такий як коробка. Якщо контейнери виготовлені з жорсткого пакувального матеріалу, такого як картон, розташування контейнерів може бути виконано гальмуван ням переднього контейнера, після якого подальші контейнери стають в ряд після зупиненого контейнера, одночасно вирівнюючись. Жорсткість контейнера в поєднанні з його формою сприяють вирівнюванню. Отже, вирівняна група контейнерів може бути укладена в розподільний вузол за допомогою автоматизованого процесу. Однак, все більш і більш часто використовувані контейнери є стискуваними. Такі контейнери виготовляються із гнучкого пакувального матеріалу і, таким чином, не мають такої ж жорсткої структури як вищеописаний тип контейнера і, отже, не можуть бути вирівняні і розташовані описаним вище чином. Щоб укласти контейнери стискуваного типу в коробку, потрібна ручна робота або використання роботизованого пакувального пристрою. 5 Два цих способи упаковування наповнених і запечатаних контейнерів стискуваного типу приводять до порівняно великих витрат. На основі вищевикладеного, метою даного винаходу є створення пристрою для укладання контейнерів стискуваного типу в розподільний вузол, який є порівняно простий і, таким чином, недорогий. Метою даного винаходу також є створення способу, який просто і раціонально дозволить укласти контейнери стискуваного типу, які підвішені і розташовані один за одним, в розподільний вузол. Для досягнення вищезгаданих задач, а також інших цілей, які стануть очевидними з приведеного нижче опису, згідно з даним винаходом запропоновані пристрій, охарактеризований ознаками, визначеними в незалежному пункті 1 формули винаходу, і спосіб, охарактеризований ознаками, визначеними в незалежному пункті 18 формули винаходу. Варіанти здійснення пристрою будуть охарактеризовані в пунктах 2-17 формули винаходу, які є залежними пунктами незалежного пункту 1 формули винаходу, і варіанти здійснення способу будуть охарактеризовані в пунктах 19-23 формули винаходу, які є залежними пунктами незалежного пункту 18 формули винаходу. Більш конкретно, згідно з даним винаходом запропонований пристрій для укладання наповнених і запечатаних контейнерів стискуваного типу в розподільний вузол, при цьому контейнери переміщуються в положення упаковування, в якому контейнери підвішені і розташовані вздовж горизонтальної поздовжньої осі, що містить захоплювальний вузол з великою кількістю пар пальців, які відповідають кількості контейнерів в положенні упаковування, при цьому кожна пара пальців, в незахоплювальному стані захоплювального вузла, має зазор між пальцями, який забезпечує проходження контейнера. Захоплювальний вузол виконаний з можливістю переведення в захоплювальний стан, в якому кожна пара пальців виконана з можливістю виконання стискаючого переміщування для захоплення контейнера. В результаті, забезпечується простий і недорогий пристрій для укладання підвішених контейнерів стискуваного типу в розподільний вузол. За рахунок того, що пристрій здатний маніпулювати контейнерами, які підвішені і вистроєні в лінію вздовж поздовжньої осі, точне розташування контейнерів, яке досягається в наповнювальній машині, може бути використане. Більш конкретно, це точне розташування використовується, захоплювальним вузлом, який має порівняно просту конструкцію. Захоплювальний вузол містить пари пальців, які в положенні захоплення виконані з можливістю виконання стискаючого переміщування для захоплення одного контейнера кожною парою. За рахунок того, що контейнер є контейнером стискуваного типу, кожний контейнер буде деформуватися на захопленій ділянці. Це забезпечує захоплення контейнера з таким стискаючим зусиллям, що вміст контейнера утворює внутрішню структуру протитиску для забезпечення чіткого захоплення. Захоплювальний вузол винайденого пристрою 93756 6 може бути виконаний з можливістю переміщування між положенням захоплення і положенням укладання, при цьому в положенні захоплення захоплювальний вузол виконаний з можливістю захоплення контейнерів в положенні упаковування за допомогою переведення захоплювального вузла в його положення захоплення, а в положенні укладання захоплювальний вузол виконаний з можливістю укладання захоплених контейнерів в розподільний вузол. Захоплювальний вузол пристрою може бути виконаний з можливістю переміщування вздовж осі переміщування, яка перпендикулярна поздовжній осі, при цьому захоплювальний вузол виконаний з можливістю переміщування між положенням захоплення і положенням укладання за допомогою переміщування вздовж осі переміщування. Захоплювальний вузол пристрою також може бути виконаний з можливістю повороту навколо осі повороту, яка паралельна поздовжній осі. Захоплювальний вузол може бути виконаний з можливістю переміщування вздовж осі переміщування, яка перпендикулярна осі повороту і яка співпадає з площиною, утвореною поздовжньою віссю і віссю повороту, причому захоплювальний вузол виконаний з можливістю переміщування між положенням захоплення і положенням укладання за допомогою повороту навколо осі повороту і переміщування вздовж осі переміщування. Пристрій, таким чином, може бути виконаний з можливістю повороту навколо осі повороту і переміщування вздовж осі переміщування, яка може проходити перпендикулярно осі повороту. Ці міри рухомості дозволяють захопити підвішені контейнери і укласти контейнери в лежачому положенні в розподільний вузол. В одному варіанті здійснення даного винаходу захоплювальний вузол в його положенні захоплення виконаний з можливістю захоплення контейнерів в положенні упаковування тільки з однієї сторони контейнера. Для переміщування з положення захоплення в положення укладання захоплювальний вузол може бути виконаний з можливістю повороту навколо осі повороту в першому напрямку повороту і переміщування вздовж осі переміщування в першому напрямку переміщування. Для переміщування з положення укладання в положення захоплення, захоплювальний вузол може бути виконаний з можливістю повороту навколо осі повороту у другому напрямку повороту, протилежному першому напрямку повороту, і переміщування вздовж осі переміщування у другому напрямку переміщування, протилежному першому напрямку переміщування. Це дозволяє гарантувати, що контейнери, укладені в розподільний вузол, одержують одну і ту ж орієнтацію. Це може бути переважним, якщо розподільний вузол також виконаний з можливістю роботи як експонувальний вузол для контейнерів, наприклад, в продовольчому магазині. За допомогою підняття розподільного вузла, контейнери можуть бути орієнтовані у вертикальному положенні і, прибираючи ділянку стінки розподільного вузла забезпечується легкий доступ до вертикальних контейнерів. Як альтернатива, пристрій може містити робо 7 чий елемент, який виконаний з можливістю повороту розподільного вузла (коробки) на 180° кожного разу, коли захоплювальний вузол поклав контейнери в розподільний вузол. Хоча захоплювальний вузол захоплює контейнери в положенні упаковування з того ж самого боку контейнера, контейнерам, укладеним в розподільний вузол, буде забезпечена поперемінна орієнтація. В результаті забезпечується ефективне використання об'єму розподільного вузла. У ще одному варіанті здійснення пристрою згідно з винаходом захоплювальний вузол в його положенні захоплення виконаний з можливістю захоплення контейнерів в положенні упаковування почергово з першої сторони контейнера або другої сторони контейнера. Для переміщування з положення захоплення для захоплення контейнерів з першої сторони контейнера, в положення укладання, захоплювальний вузол може бути виконаний з можливістю повороту навколо осі повороту в першому напрямку повороту і переміщування вздовж осі переміщування в першому напрямку переміщування. Для переміщування з положення укладання в положення захоплення для захоплення контейнерів з другої сторони контейнера, захоплювальний вузол може бути виконаний з можливістю повороту навколо осі повороту в першому напрямку повороту і переміщування вздовж осі переміщування у другому напрямку переміщування, протилежному першому напрямку переміщування. Для переміщування з положення захоплення для захоплення контейнерів з другої сторони контейнера, в положення укладання, захоплювальний вузол може бути виконаний з можливістю повороту навколо осі повороту у другому напрямку повороту, протилежному першому напрямку повороту, і переміщування вздовж осі переміщування в першому напрямку повороту. Для переміщування з положення укладання в положення захоплення для захоплення контейнерів з першої сторони контейнера, захоплювальний вузол може бути виконаний з можливістю повороту навколо осі повороту у другому напрямку повороту, і переміщування вздовж осі переміщування у другому напрямку переміщування. Це означає, що контейнери будуть укладені в розподільний вузол з поперемінною, протилежною орієнтацією, яка допомагає поліпшити використання об'єму розподільного вузла. Захоплювальний вузол пристрою може бути виконаний з можливістю захоплення контейнерів групами щонайменше по два контейнери. Переважно, група контейнерів займає весь рівень в розподільному вузлі. У ще одному варіанті виконання, захоплювальний вузол може містити задній елемент для підтримування всіх пар пальців. Задній елемент може підтримувати щонайменше дві пари пальців, причому пари пальців виконані з можливістю переміщування між стисненим разом станом і відокремленим станом. Таким чином, можна буде захопити підвішені контейнери, розташовані на першій відстані один від одного. Друга відстань може бути меншою, ніж перша відстань, що дозволяє додатково поліпшити використання об'єму розподільно 93756 8 го вузла. Захоплювальний вузол пристрою може бути виконаний з можливістю повороту навколо осі повороту, яка паралельна поздовжній осі і може бути виконаний з можливістю переміщування вздовж осі переміщування, яка перпендикулярна осі повороту і яка співпадає з площиною, утвореною поздовжньою віссю і віссю обертання, причому пристрій додатково містить поворотний двигун, який виконаний з можливістю переміщування паралельно осі переміщування, причому захоплювальний вузол підтримується з можливістю повороту поворотним двигуном для повороту навколо осі повороту. В результаті, легко досягається рухомість захоплювального вузла. Захоплювальний вузол може підтримуватися поворотним двигуном за допомогою важеля, який проходить перпендикулярно осі повороту і який на першому кінці приєднаний до поворотного двигуна, а на другому кінці до заднього елемента. Задній елемент може бути шарнірно з'єднаний з другим кінцем важеля. Це дозволяє регулювати кут між парами пальців і важелем. Більш конкретно, можна буде регулювати захоплювальний вузол для захоплення контейнерів в точці вище або нижче осі повороту, що, в поєднанні з укладанням контейнерів в розподільний вузол, дозволяє змістити контейнер убік. Напрямок бічного зміщення залежить від того, з якого боку контейнера контейнер був захоплений захоплювальним вузлом, що дозволяє додатково поліпшити використання об'єму розподільного вузла. Пристрій може додатково містити робочий елемент, який виконаний з можливістю почергового зміщення в бічному напрямку розподільного вузла у взаємно протилежних напрямках перед кожним укладанням контейнерів в розподільний вузол. Це приводить до альтернативного способу забезпечення бічного зміщення контейнерів. У ще одному варіанті виконання даного винаходу пристрій утворює модуль, який виконаний з можливістю приєднання до наповнювальної машини для наповнення контейнерів стискуваного типу. Як альтернатива, пристрій може бути виконаний за одне ціле з наповнювальною машиною для наповнення контейнерів стискуваного типу. Більш того згідно з даним винаходом запропонований спосіб укладання наповнених і запечатаних контейнерів стискуваного типу в розподільний вузол, при цьому контейнери переміщують в положення упаковування підвішеними і розташованими вздовж поздовжньої осі. Спосіб включає захоплення за допомогою стискаючого переміщування, з одною з першої і другої сторони контейнера, контейнерів в положенні упаковування один за одним, при цьому кожний контейнер захоплюють з таким зусиллям стиснення, що вміст контейнера утворює внутрішню структуру протитиску для забезпечення чіткого захоплення. Це приводить до способу, який дозволяє використовувати точне розташування контейнерів, яке може бути забезпечене на наповнювальної машині. Оскільки спосіб включає захоплення кожного контейнера окремо в положенні упаковування, виконуючи стискаюче переміщування, захоплені 9 контейнери стискуваного типу будуть деформуватися доти, поки вміст контейнерів не утворить упор, або структуру протитиску, яка забезпечує чітке захоплення. Це гарантує, що захоплений контейнер не зісковзне або не зміститься будьяким іншим чином, внаслідок чого можна буде підтримувати положення контейнера під повним контролем. Спосіб може додатково включати поворот захоплених контейнерів навколо осі повороту так, що друга з першої і другої сторони контейнера орієнтована вниз, при цьому вісь повороту паралельна поздовжній осі і розташована у вертикальній площині, яка містить поздовжню вісь, переміщування захоплених контейнерів у вертикальному напрямку вниз і укладання захоплених контейнерів в розподільний вузол за допомогою відпущення їх, і подальше повторення процесу доти, поки розподільний вузол не буде заповнений контейнерами. Це забезпечує укладання контейнерів в розподільний вузол з ефективним використанням його об'єму. В одному варіанті здійснення способу контейнери в положенні упаковування захоплюють тільки з першої сторони контейнера. Цей варіант здійснення способу також може включати поворот розподільного вузла (коробки) на 180° перед етапом укладання захоплених контейнерів в розподільний вузол. У додатковому варіанті здійснення способу контейнери в положенні упаковування почергово захоплюють з першої сторони контейнера і другої сторони контейнера. Етап зміщення в бічному напрямку захоплених контейнерів відносно розподільного вузла виконують перед етапом укладання захоплених контейнерів в розподільний вузол. Короткий опис креслень Варіанти здійснення даного винаходу будуть описані нижче як приклад і з посиланням на супровідні креслення, на яких: Фіг. 1 являє собою вигляд в перспективі пристрою згідно з даним винаходом для керування наповненими і запечатаними контейнерами стискуваного типу. Фіг. 2 являє собою вигляд в перспективі захоплювального вузла пристрою, показаного на Фіг. 1. Фіг. 3 являє собою схематичний вигляд в перерізі розподільного вузла, в який пристрій згідно з даним винаходом поклав наповнені і запечатані контейнери стискуваного типу. Фіг. 4a-4g схематично ілюструють спосіб укладання в розподільний вузол підвішених контейнерів за допомогою захоплювального вузла пристрою згідно з першим варіантом здійснення винаходу. Фіг. 5а-5і схематично ілюструють спосіб укладання в розподільний вузол підвішених контейнерів за допомогою захоплювального вузла пристрою згідно з другим варіантом здійснення винаходу. Фіг. 6а-6і схематично ілюструють спосіб укладання в розподільний вузол підвішених контейнерів за допомогою захоплювального вузла пристрою згідно з третім варіантом здійснення винаходу. 93756 10 Опис варіантів здійснення винаходу Винахід стосується пристрою 1, показаного на Фіг. 1 для укладання наповнених і запечатаних контейнерів 2 стискуваного типу в розподільний вузол З, наприклад, у вигляді коробок 4. Під контейнерами 2 стискуваного типу маються на увазі контейнери, які мають відділення, яке утворене гнучкими стінками, які з'єднані вздовж з'єднувальної ділянки. Стінки звичайно містять дві протилежні бічні стінки і нижню стінку. Стінки можуть бути виконані повністю з шаруватого пакувального матеріалу, який може містити внутрішній шар з поліолефінового матеріалу, наповненого мінералом. Контейнери 2, укладені в коробки 4, можуть бути надалі розподілені. Пристрій 1 згідно з винаходом може, як показано на кресленні, утворювати модуль, який виконаний з можливістю приєднання до наповнювальної машини (не показана). Як альтернатива, пристрій 1 може бути виконаний за одне ціле з наповнювальною машиною. Пристрій 1 містить пристрій 5 для прийому контейнерів 2, які були наповнені і запечатані на наповнювальній машині. Контейнери 2 переміщуються в положення В упаковування, в якому вони підвішуються і розташовуються один за одним вздовж поздовжньої осі Al в чіткому, рознесеному взаємному розташуванні. Якщо пристрій 1 виконаний за одне ціле з наповнювальною машиною, пристрій 1 може бути виконаний з можливістю керування контейнерами 2, коли, після наповнення і запечатування вони були переміщені в положення упаковування, в якому вони підвішені в наповнювальній машині, один за одним вздовж поздовжньої осі. Пристрій 1 додатково містить захоплювальний вузол 6, який виконаний з можливістю переміщування між положенням захоплення і положенням укладання. В положенні захоплення захоплювальний вузол 6 виконаний з можливістю захоплення підвішених контейнерів 2 в положенні В упаковування з однієї сторони контейнера. В положенні укладання захоплювальний вузол виконаний з можливістю укладання захоплених контейнерів 2 в коробки 4. Пристрій 1 містить пристрій 7 для подачі порожніх коробок 4 і для розвантаження коробок 4, коли вони наповнені контейнерами 2. Захоплювальний вузол 6 виконаний з можливістю захоплення контейнерів 2, які підвішені в положенні В упаковування і, таким чином, вертикально орієнтовані, і переміщування їх за допомогою повороту для укладання їх горизонтально орієнтованими в коробку 4. Захоплювальний вузол 6 може бути виконаний з можливістю захоплення одного контейнера 2 або захоплення контейнерів 2 групами щонайменше по два контейнери, і в показаному варіанті здійснення захоплювальний вузол 6 виконаний з можливістю захоплення контейнерів 2 групами по чотири контейнери. Оскільки контейнери 2 є контейнерами стискуваного типу, кожний контейнер буде деформуватися на захопленій ділянці доти, поки вміст контейнера не утворить структуру протитиску або 11 упор, таким чином, одержуючи чітке захоплення. Коли захоплювальний вузол 6 поклав захоплену групу контейнерів 2 (або окремий контейнер) в коробку 4, захоплювальний вузол 6 повертається в його положення захоплення, щоб захопити нову групу контейнерів 2, які були переміщені в положення В упаковування. Захоплювальний вузол 6 може бути виконаний з можливістю укладання нової групи контейнерів 2 на контейнери 2, вже розташовані в коробці 4, і потім повторення процесу захоплення і укладання контейнерів 2 доти, поки коробка 4 не буде заповнена контейнерами 2. Як відмічалося вище, захоплювальний вузол 6 виконаний з можливістю переміщування з його положення захоплення в його положення укладання за допомогою переміщування з одночасним поворотом. Більш конкретно, захоплювальний вузол 6 виконаний з можливістю повороту навколо осі А2 повороту, яка паралельна поздовжній осі A1 і виконаний з можливістю переміщування вздовж осі A3 переміщування, яка перпендикулярна осі А2 повороту і розташована в площині, утвореній віссю А2 повороту і поздовжньою віссю A1. Пристрій 1 має стійку 8, на якій з можливістю переміщування розташований поворотний двигун 9 для переміщування паралельно осі A3 переміщування в першому напрямку P1 переміщування і у другому напрямку Р2 переміщування, який протилежний першому напрямку Pl переміщування. Поворотний двигун 9 має шийку вихідного вала (не показана), яка за допомогою приведення в дію поворотного двигуна 9 повертається навколо осі А2 повороту в першому напрямку V1 повороту і напрямку V2 повороту, який протилежний першому напрямку V1 повороту. Як схематично показано на Фіг. 2, на яку зараз також зроблене посилання, захоплювальний вузол 6 підтримується поворотним двигуном 9 за допомогою важеля 10, який проходить перпендикулярно осі А2 повороту, і який на першому кінці 11 приєднаний до шийки вала, а на другому кінці 12 - до заднього елемента 13 захоплювального вузла 6. Це означає, що захоплювальний вузол 6 виконаний з можливістю переміщування вздовж осі A3 переміщування за допомогою переміщування поворотного двигуна 9 вздовж стійки 8 і з можливістю повороту навколо осі А2 повороту за допомогою приведення в дію поворотного двигуна 9. Задній елемент 13 захоплювального вузла 6 підтримує велика кількість пар 14 пальців. Кількість пар 14 пальців відповідає кількості контейнерів 2, які включені в групу контейнерів 2, якою маніпулюють захоплювальним вузлом 6. У варіанті здійснення, показаному на Фіг. 1, захоплювальний вузол 6 виконаний з можливістю маніпулювання контейнерами 2 групами по чотири контейнери 2 і, отже, задній елемент 13 підтримує чотири пари 14 пальців. Кожна пара 14 пальців виконана з можливістю маніпулювання одним контейнером 2. Захоплювальний вузол 6 виконаний з можливістю переведення між захоплювальним станом і незахоплювальним станом. На Фіг. 2 видно, як пальці 15, що включені в пари 14 пальців, утворюють між ними зазор 17, який в незахоплювальному стані захоплювального 93756 12 вузла забезпечує проходження контейнера 2. У захоплювальному положенні захоплювального вузла 6 кожна пара 14 пальців діє для втримання контейнера 2, розташованого між пальцями 15 пари 14 пальців, про яку йдеться. Захоплювальний вузол 6 може бути виконаний з можливістю захоплення, в його положенні захоплення, груп контейнерів 2 тільки з однієї сторони контейнера. Як альтернатива, захоплювальний вузол 6 може бути виконаний з можливістю захоплення, в його положенні захоплення, груп контейнерів 2 почергово з першої і другої сторони контейнера. Якщо контейнери 2 або групи контейнерів захоплені тільки з однієї сторони контейнера, контейнери 2 можуть бути укладені один на один в розподільному вузлі 3 з однією орієнтацією. Якщо контейнери 2 або група контейнерів почергово захоплені з першої і другої сторони контейнера, подальші контейнери 2 будуть, із захоплювальним вузлом 6 в його положенні укладання, мати орієнтацію в горизонтальній площині, яка протилежна орієнтації попередніх контейнерів 2. Із Фіг. 3, на яку зараз зроблене посилання, ясно як перша попередня група G1 контейнерів 2 була укладена в розподільний вузол 3 у вигляді коробки 4 з першою орієнтацією в горизонтальній площині, і як друга подальша група G2 контейнерів 2 була укладена в коробку 4 на першу групу G1 контейнерів 2, але з протилежною орієнтацією в горизонтальній площині. Принцип укладання повторюється доти, поки коробка 4 не буде наповнена. Такий же принцип укладання може бути забезпечений навіть якщо захоплювальний вузол 6 в його положенні захоплення виконаний з можливістю захоплення контейнерів 2 тільки з однієї сторони контейнера. Більш конкретно, це може бути досягнуто пристроєм згідно з винаходом, що містить робочий елемент (не показаний), який виконаний з можливістю повороту розподільного вузла (коробки) на 180° кожного разу, коли захоплювальний вузол поклав групу контейнерів в коробку. Фіг. 4a-4g, на які зараз зроблене посилання, схематично ілюструє принцип переміщування захоплювального вузла 6 пристрою 1 згідно з першим варіантом здійснення винаходу. У цьому варіанті здійснення захоплювальний вузол 6 виконаний з можливістю захоплення, в його положенні захоплення, контейнерів 2 з першої сторони 18 контейнера. Захоплювальний вузол 6 виконаний з можливістю маніпулювання контейнерами 2, які переміщуються в положення В упаковування, в якому вони підвішені, один за одним вздовж поздовжньої осі Al, яка в показаному прикладі проходить в горизонтальній площині. На кресленнях захоплювальний вузол 6 діє для захоплення одного контейнера 2 за раз і, отже, містить тільки одну пару 14 пальців, але ясно, що, як розглядалося вище, захоплювальний вузол 6 може бути виконаний з можливістю захоплення контейнерів 2 групами по декілька контейнерів 2. Пара 14 пальців захоплювального вузла 6 проходить паралельно важелю 10 і, таким чином, перпендикулярно осі А2 повороту, навколо якої 13 повертається захоплювальний вузол 6. На Фіг. 4а захоплювальний вузол 6 розташований в його положенні захоплення і зайняв положення для захоплення першого контейнера 2а з першої сторони 18 контейнера. Коли захоплювальний вузол 6 розташований в його положенні захоплення його пара 14 пальців має протяжність, яка перетинає площину, утворену поздовжньою віссю A1 і віссю А2 повороту. За допомогою пальців 15 пари 14 пальців захоплювального вузла 6, в незахоплювальному стані захоплювального вузла, які створюють між ними зазор 17, який забезпечує проходження контейнера 2а, захоплювальний вузол 6 може легко зайняти положення захоплення. Як тільки захоплювальний вузол 6 зайняв положення захоплення, він переводиться в захоплювальний стан, в якому пальці 15 пари 14 пальців виконують стискаюче переміщування для захоплення першого контейнера 2а. Оскільки контейнер 2а є контейнером стискуваного типу, контейнер 2а буде деформуватися в стисненій ділянці і вміст контейнера утворить структуру протитиску. Це приводить до чіткого захоплення контейнера 2а. На Фіг. 4b показаний захоплювальний вузол при переміщенні з положення захоплення в положення укладання. Захоплювальний вузол 6 залишається в його захоплювальному стані і, таким чином, підведе перший контейнер 2а в положення укладання. Під час цього переміщування захоплювальний вузол 6 переміщується вздовж осі A3 переміщування в першому напрямку Pl переміщування і повертається навколо осі А2 повороту в першому напрямку V1 повороту. На Фіг. 4с показаний захоплювальний вузол 6 в положенні укладання, в якому захоплювальний вузол 6 виконаний з можливістю укладання захоплених контейнерів 2 в коробку (не показана). Більш конкретно, перший контейнер 2а був повернений, щоб друга сторона 19 контейнера, протилежна першій стороні 18 контейнера, стала орієнтованою вниз. Перший контейнер 2а може тепер бути укладений в коробку (не показана), за допомогою переведення захоплювального вузла 6 в його незахоплювальний стан. На Фіг. 4с також показано, як другий контейнер 2b був просунений в положення В упаковування і, таким чином, зайняв положення першого контейнера 2а перед тим як він був зібраний захоплювальним вузлом 6. На Фіг. 4d показаний захоплювальний вузол 6 при переміщенні з положення укладання назад в положення захоплення для захоплення контейнера 2 з першої сторони 18 контейнера. Захоплювальний вузол 6 залишає перший контейнер 2а в коробці і переміщується в положення захоплення без контейнера. Під час цього переміщування захоплювальний вузол 6 переміщується вздовж осі A3 переміщування у другому напрямку Р2 переміщування, який протилежний першому напрямку P1 переміщування, і повертається навколо осі А2 повороту у другому напрямку V2 повороту, який протилежний першому напрямку V1 повороту. 93756 14 На Фіг. 4е захоплювальний вузол 6 зайняв положення захоплення для захоплення другого контейнера 2b з першої сторони 18 контейнера. В положенні захоплення пара 14 пальців захоплювального вузла 6 має, як раніше, протяжність, яка перетинає площину, утворену поздовжньою віссю A1 і віссю А2 повороту. Оскільки пальці 15 пари 14 пальців захоплювального вузла 6 в незахоплювальному стані захоплювального вузла 6 утворюють між ними зазор 17, який забезпечує проходження контейнера 2b, захоплювальний вузол 6 може легко зайняти положення захоплення. Як тільки захоплювальний вузол 6 зайняв положення захоплення, він переводиться в захоплювальний стан, в якому пальці 15 пари 14 пальців виконують стискаюче переміщування для захоплення другого контейнера 2b. На Фіг. 4f показаний захоплювальний вузол 6 при переміщенні з положення захоплення в положення укладання. Захоплювальний вузол 6 залишається в його захоплювальному стані і, таким чином, підведе другий контейнер 2b в положення укладання. Під час цього переміщування захоплювальний вузол 6 переміщується вздовж осі A3 переміщування в першому напрямку P1 переміщування і повертається навколо осі А2 повороту в першому напрямку V1 повороту. На Фіг. 4g показаний захоплювальний вузол 6 в положенні укладання, в якому другий контейнер 2b був повернений, щоб друга сторона 19 контейнера, яка протилежна першій стороні 18 контейнера, стала орієнтована вниз. Другий контейнер 2Ь може тепер бути укладений в коробку (не показана), на перший контейнер 2а і з тією ж самою орієнтацією в горизонтальній площині, переводячи захоплювальний вузол 6 в незахоплювальний стан. Як відмічалося вище, пристрій згідно з винаходом може містити робочий елемент (не показаний), який виконаний з можливістю повороту розподільного вузла (коробки) кожний раз, коли контейнер був укладений в нього для забезпечення принципу укладання, показаного на Фіг. 3. На Фіг. 4g також показано як третій контейнер 2с був просунутий в положення В упаковування і зайняв положення, яке раніше було зайнято першим контейнером 2а, а потім другим контейнером 2b. Згодом захоплювальний вузол 6 (не показаний) знов переміщується в положення захоплення для повторення вищеописаного процесу доти, поки коробка (не показана) не буде наповнена контейнерами 2. На Фіг. 5a-5g, на які зараз зроблене посилання, схематично проілюстрований принцип переміщування захоплювального вузла 6 пристрою 1 згідно з другим варіантом здійснення винаходу. У цьому варіанті здійснення захоплювальний вузол 6 виконаний з можливістю захоплення, в його положенні захоплення, контейнерів 2 почергово з першої сторони 18 і другої сторони 19 контейнера. Що відрізняє цей другий варіант здійснення від 15 першого варіанта здійснення, який був описаний з посиланням на Фіг. 4a-4g це те, що захоплювальний вузол 6 у другому варіанті здійснення після укладання контейнера 2а в коробку (не показана) переміщується з положення укладання в положення захоплення для захоплення другого контейнера 2Ь з другої сторони 19 контейнера, який показаний на Фіг. 5d-5е. Під час цього переміщування, яке особливо очевидне з Фіг. 5d, захоплювальний вузол 6, таким чином, переміщується вздовж осі A3 переміщування у другому напрямку Р2 переміщування, який протилежний першому напрямку P1 переміщування, і продовжує повертатися навколо осі А2 повороту в першому напрямку V1 повороту. На Фіг. 5е захоплювальний вузол 6 зайняв положення захоплення для захоплення другого контейнера 2b з другої сторони 19 контейнера, яка протилежна першій стороні 18 контейнера. На Фіг. 5f показаний захоплювальний вузол 6 при переміщенні з положення захоплення для захоплення контейнера 2b з другої сторони 19 контейнера в положення укладання. Під час цього переміщування захоплювальний вузол 6 переміщується вздовж осі A3 переміщування в першому напрямку P1 переміщування і повертається навколо осі А2 повороту у другому напрямку V2 повороту, який протилежний першому напрямку V1 повороту. На Фіг. 5g показаний захоплювальний вузол 6 в положенні укладання, в якому другий контейнер 2b був орієнтований його першою стороною 18 контейнера поверненою вниз. Другий контейнер 2b може тепер бути укладений в коробку (не показана) на перший контейнер 2а, але з протилежною орієнтацією, переводячи захоплювальний вузол 6 в його незахоплювальний стан. Потім захоплювальний вузол 6 (не показаний) знову переміщується в положення захоплення для захоплення третього контейнера 2с з першої сторони 18 контейнера, за допомогою продовження повороту навколо осі А2 повороту у другому напрямку V2 повороту і переміщування вздовж осі A3 переміщування у другому напрямку Р2 переміщування для повторення вищеописаного процесу доти, поки коробка (не показана) не буде наповнена контейнерами 2. В результаті, принцип укладання, показаний на Фіг. 3, може бути забезпечений в коробці. У вищеописаних варіантах здійснення, було описано, що пари 14 пальців захоплювального вузла 6 мають протяжність, яка паралельна важелю 10 захоплювального вузла 6. В тому випадку, якщо вісь А2 обертання проходить через центр контейнерів 2, розташованих в положенні В упаковування вздовж поздовжньої осі A1, коли захоплювальний вузол 6 знаходиться в положенні захоплення, поворот контейнерів 2 навколо центра досягається поворотом захоплювального вузла 6. Однак можливо забезпечити парам 14 пальців різну протяжність, яка показана на Фіг. 6а-6і, які зображають третій варіант виконання даного винаходу. У третьому варіанті здійснення захоплювальний вузол 6 виконаний з можливістю, в його поло 93756 16 женні захоплення, почергового захоплення контейнерів, які були переміщені в положення В упаковування з першої і другої сторони контейнера. Захоплювальний вузол переміщується між положенням захоплення і положенням укладання способом, який, по суті, відповідає способу, описаному вище з посиланням на Фіг. 5a-5g. Що відрізняє цей варіант здійснення від варіантів, описаних раніше, це те, що в третьому варіанті здійснення задній елемент 13 захоплювального вузла 6 шарнірно з'єднаний з важелем 10. Коли захоплювальний вузол 6 знаходиться в положенні захоплення для захоплення першого контейнера 2а з першої сторони 18 контейнера, який показаний на Фіг. 6а, задній елемент 13 був повернений відносно важеля 10, щоб пара 14 пальців горизонтально розташовувалася під кутом а до важеля 10. В результаті пара 14 пальців, коли захоплювальний вузол 6 переводиться в його захоплювальний стан, захопить перший контейнер 2а в точці O над віссю А2 повороту. Потім захоплювальний вузол 6 переміщується в положення укладання, яке показане на Фіг. 6b6с. Коли захоплювальний вузол 6 знаходиться в положенні укладання задній елемент 13 повернутий, щоб пара 14 пальців розташовувалася паралельно важелю 10, який показаний на Фіг. 6d. Як альтернатива цей поворот може бути виконаний під час переміщування в положення укладання. Поворот заднього елемента 13 відносно важеля 10 приводить до орієнтування пари 14 пальців так, щоб вказувати в першому напрямку P1 переміщування. Поворот також спричиняє зміщення першого контейнера 2а убік в першому напрямку R1. Коли захоплювальний вузол 6 був переведений в його незахоплювальний стан він переміщується в положення захоплення для захоплення контейнера 2Ь з другої сторони 19 контейнера, яке показане на Фіг. 6e-6f. У цьому положенні захоплення задній елемент 13 був повернений відносно важеля 10 так, що пара 14 пальців горизонтально розташовується під кутом а до важеля 10. В результаті, пара 14 пальців буде діяти, коли захоплювальний вузол 6 переведений в його положення захоплення для захоплення другого контейнера 2b в точці O над віссю А2 повороту. Орієнтація пари 14 пальців за допомогою повороту заднього елемента 13 відносно важеля 10 може бути як альтернатива виконана під час переміщування в положення захоплення, про яке йдеться. Потім захоплювальний вузол 6 знов переміщується в положення захоплення, в якому задній елемент 13 знову був повернений відносно важеля 10, що очевидно з Фіг. 6g-6i. Пара 14 пальців розташована паралельно важелю 10 так, щоб вказувати в першому напрямку P1 переміщування. Поворот також спричиняє зміщення другого контейнера 2b убік, але у другому напрямку R2, який протилежний напрямку R1. Внаслідок того, що захоплювальний вузол 6 виконаний з можливістю захоплення контейнерів 2а, 2b в точці O над віссю А2 обертання, таким чином, забезпечується бічне відокремлення кон 17 тейнерів 2а, 2b, укладених в коробці 4 (не показана), яке допомагає додатково поліпшити використання об'єму коробки 4. Відокремлення контейнерів 2, укладених в коробці один на один, може бути виконане іншими способами. Таким чином, наприклад, можливо захопити, за допомогою захоплювального вузла 6, контейнери з обох першої сторони 18 контейнера і другої сторони 19 контейнера в точці, відповідній центру контейнерів 2. Важіль 10 зігнутий так відносно пари 14 пальців, що вісь А2 повороту розташована на деякій відстані над точкою захоплення. Повертаючи захоплювальний вузол 6 над віссю А2 повороту під час одночасного переміщування вздовж осі A3 переміщування, забезпечується бічне переміщування захопленого контейнера 2, коли захоплювальний вузол переміщений в положення укладання. Згідно з даним винаходом, таким чином, забезпечується пристрій 1 для укладання наповнених і запечатаних контейнерів 2 стискуваного типу в розподільний вузол 3. Пристрій 1 виконаний з можливістю захоплення контейнерів 2, коли вони були переміщені в положення В упаковування, в якому вони підвішені, один за одним вздовж поздовжньої осі A1, тобто в стані, в якому вони можуть бути розташовані в наповнювальній машині. Захоплювальний вузол 6 містить пари пальців, які, в захоплювальному стані захоплювального вузла, виконують стискаюче переміщування. Захоплені контейнери є контейнерами стискуваного типу, тобто гнучкими, і, таким чином, будуть деформуватися в стискуваній ділянці доти, поки вміст не утворить опору або структуру протитиску, яка забезпечує чітке захоплення. Пристрій 1 згідно з винаходом може бути виконаний у вигляді модуля, який приєднаний до наповнювальної машини і який містить пристрій 5 для прийому контейнерів 2 в підвішеному положенні або бути виконаний за одне ціле з наповнювальною машиною. Оскільки пристрій 1 виконаний з можливістю маніпулювання контейнерами в підвішеному положенні, гарантується, що пристрій 1 може використовувати точне розташування контейнерів 2, які забезпечуються наповнювальною машиною. Чітке захоплення контейнерів, яке досягається, гарантує, що положення контейнерів знаходиться під контролем навіть після захоплення. Пристрій 1 згідно з винаходом додатково містить захоплювальний вузол 6, який може бути виконаний з можливістю захоплення контейнерів 2 з першої сторони 18 контейнера, або як альтернатива почергового захоплення контейнерів 2 з протилежних сторін 18, 19. Захоплювальний вузол 6 додатково виконаний з можливістю переміщування, під час повороту і прямолінійного переміщування, захоплених контейнерів 2 в розподільний вузол 3, такий як коробка 4 для укладання один на один. Якщо контейнери 2 захоплені тільки з першої 93756 18 сторони 18 контейнера, контейнери 2 можуть бути розташовані в розподільному вузлі 3 з тією ж самою орієнтацією. Таким чином, наповнений розподільний вузол 3 може, наприклад, служити як вузол для експонування контейнерів 2 в торгівельній точці, наприклад, піднявши розподільний вузол 3 так, що контейнери 2, укладені в ньому, поставлені у вертикальному положенні. Пристрій 1 згідно з винаходом також дозволяє ефективно використовувати об'єм розподільного вузла 3 за допомогою укладання контейнерів з протилежною орієнтацією. Це може бути досягнуте поворотом розподільного вузла 3 кожного разу, коли контейнери 2 укладені в ньому або, як альтернатива, почерговим захопленням контейнерів 2 з першої сторони 18 і другої сторони 19 контейнера. Використання об'єму розподільного вузла може бути додатково поліпшене зміщенням убік груп контейнерів 2, які укладені один на один в розподільному вузлі 3. Це зміщення убік може бути виконане, наприклад, почерговим захопленням контейнерів з першої сторони 18 і з другої сторони 19 контейнера, причому захоплення здійснюється в точці над віссю А2 повороту або як альтернатива за допомогою розташування осі А2 повороту над точкою, в якій здійснюється захоплення. Зміщення убік контейнерів також може бути виконане зміщенням убік розподільного вузла в почергово протилежних напрямках кожного разу, коли група контейнерів укладається в розподільний вузол. Таким чином, забезпечується пристрій 1, який має відносно просту конструкцію і є раціональним, виконаний з можливістю укладання контейнерів 2 в коробку 4 і, який також дозволяє ефективно використовувати об'єм коробки 4. Як описувалося вище захоплювальний вузол 6 може бути виконаний з можливістю захоплення контейнерів 2 групами по декілька контейнерів 2. Захоплювальний вузол 6 може бути виконаний з можливістю захоплення стільки ж контейнерів 2, скільки розташовано на дні коробки 4, внаслідок чого завершений шар утворюється кожного разу, коли захоплювальний вузол 6 укладає групу контейнерів в коробку 4. Ясно, що даний винахід не обмежується варіантами здійснення, описаними вище. Наприклад, пари 14 пальців захоплювального вузла 6 можуть бути виконані з можливістю переміщування один відносно одного. Це дозволяє захоплювати контейнери 2, які розташовані на першій відстані один від одного, і укладати контейнери 2 в коробку 4 на другій відстані один від одного, регулюючи відстань між парами 14 пальців. Таким чином, друга відстань може бути менше першої відстані, для того щоб додатково поліпшити використання об'єму коробки 4. Різні зміни і доповнення, таким чином, є можливими і, отже, обсяг даного винаходу визначається тільки прикладеною формулою винаходу. 19 93756 20 21 93756 22 23 Комп’ютерна верстка Д. Шеверун 93756 Підписне 24 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice and method for placing containers of collapsible type in distribution unit
Автори англійськоюGustaffson, Per
Назва патенту російськоюУстройство и способ укладки контейнеров сжимаемого типа b распределительный узел
Автори російськоюГустаффсон Пер
МПК / Мітки
МПК: B65B 35/16, B65B 5/08
Мітки: пристрій, спосіб, контейнерів, типу, укладання, розподільний, стискуваного, вузол
Код посилання
<a href="https://ua.patents.su/12-93756-pristrijj-i-sposib-ukladannya-kontejjneriv-stiskuvanogo-tipu-v-rozpodilnijj-vuzol.html" target="_blank" rel="follow" title="База патентів України">Пристрій і спосіб укладання контейнерів стискуваного типу в розподільний вузол</a>
Торцевий вузол для закріплення контейнерів на залізничній платформі

Номер патенту: 26052
Опубліковано: 27.08.2007
Автори: Гончаренко Ігор Владиславович, Масліков Юрій Валентинович, Момот Сергій Іванович
МПК: B60P 7/06
Мітки: залізничний, закріплення, платформи, вузол, контейнерів, торцевий
Формула / Реферат:
1. Торцевий вузол для закріплення контейнерів на залізничній платформі, що містить торцеву та бокові стінки, ложемент і пристрій фіксування торцевого вузла, який відрізняється тим, що щонайменше з одного боку торцевого вузла, в нижній його частині, розташований упор, який закріплений з можливістю його переміщення і взаємодії з фітинговим вузлом контейнера для забезпечення фіксування контейнера.2. Торцевий вузол згідно з п. 1, який...
Торцевий вузол для закріплення переважно контейнерів на залізничній платформі
Номер патенту: 81594
Опубліковано: 10.01.2008
Автори: Гончаренко Ігор Владиславович, Масліков Юрій Валентинович, Момот Сергій Іванович
МПК: B60P 7/06
Мітки: закріплення, контейнерів, вузол, переважно, торцевий, платформи, залізничний
Формула / Реферат:
1. Торцевий вузол для закріплення переважно контейнерів на залізничній платформі, що містить торцеву та бокові стінки, ложемент і пристрій фіксування торцевого вузла, який відрізняється тим, що містить перший і щонайменше один другий упорні елементи для фіксування контейнера, при цьому перший упорний елемент закріплений щонайменше з одного боку торцевого вузла, в нижній його частині, а всі упорні елементи для фіксування контейнера шарнірно...
Комплектний розподільний пристрій типу км-1ф (м/в)
Номер патенту: 46673
Опубліковано: 25.12.2009
Автор: Рубинштейн Леонід Петрович
МПК: H02B 11/00
Мітки: пристрій, розподільний, комплектний, км-1ф, типу
Формула / Реферат:
Комплектний розподільний пристрій, що містить каркас, відсік збірних шин, відсік трансформаторів струму, релейний відсік, відсік викотного елемента з рухомими контактами, заземлювач, верхні і нижні нерухомі струмопровідні контакти, який відрізняється тим, що на перегородці між відсіком збірних шин, відсіком трансформаторів струму і відсіком викотного елемента установлені полімерні прохідні ізолятори, до внутрішньої частини яких закріплені...
Розподільний ковпачок для контейнерів для рідин

Номер патенту: 88078
Опубліковано: 10.09.2009
Автори: Мондсзайн Карл, Сміт Метью Ерік
МПК: B65D 47/06, B65D 47/00
Мітки: рідин, розподільний, контейнерів, ковпачок
Формула / Реферат:
1. Розподільний ковпачок, який є цільним вузлом, виготовленим формуванням з полімерного матеріалу, який включає першу трубчасту частину (2) круглого перерізу з першим радіусом для приєднання до вхідного отвору контейнера для рідин і другу трубчасту частину (6) круглого перерізу з другим радіусом, меншим за перший, причому кінець першої трубчастої частини з'єднано з одним кінцем другої трубчастої частини еластичною кільцевою цільною перетинкою...
Захоплювальний пристрій для контейнерів
Номер патенту: 85961
Опубліковано: 10.03.2009
Автори: Іванова Анастасія Олегівна, Іванов Олег Миколайович
МПК: B66C 1/62
Мітки: захоплювальний, пристрій, контейнерів
Формула / Реферат:
Захоплювальний пристрій для контейнерів, що містить раму, розташовані по кутах рами поворотні захоплювальні кулачкові елементи, привід повороту поворотних захоплювальних кулачкових елементів, що містить встановлений в центрі рами порожнистий циліндр, розташований всередині циліндра шток з привантаженням, виконаний з розташованими на його зовнішній поверхні під кутом 90° один до одного подовжніми пазами, з'єднаними між собою гвинтовими пазами,...
Попередній патент: Засіб, що проявляє ноотропну активність, має антихолестеразну дію, відновлює та стимулює нервово-м`язову передачу
Наступний патент: Тренажер для навчання введенню голки у вену (варіанти), спосіб навчання учня вводити голку у вену, набір для навчання учня введенню голки у вену
Випадковий патент: Суміщена шпиндельна опора