Спосіб і система маршрутизації для систем сільськогосподарських машин
Номер патенту: 95896
Опубліковано: 26.09.2011
Автори: Меєр цу Хелліген Ларс Петер, Дікханс Норберт Др, Хустер Йохен, Бруннерт Андреас
Формула / Реферат
1. Спосіб маршрутизації для групи (G) систем (1, 2, 2') сільськогосподарських машин для обробки території (S1, S2, S3, S4, S5), що підлягає обробці , при якому машинні системи (1, 2, 2') мають відповідно керуючі пристрої (10, 10'), включаючи пристрій для визначення місця знаходження (3,3'), пристрій зв'язку (7, 7'), пристрій для планування маршруту (5, 5'), а також пристрій визначення інформації для планування маршруту (6, 6'), а машинні системи (1, 2, 2') виконані з можливістю обміну інформацією між собою про планування маршруту (L1, L2 ,..., L19, Lv, Lv6, Lv7, Lv8, Lg, SZ, SZ') через пристрій зв'язку (7, 7'), причому спільний план маршруту складається пристроєм для планування маршруту (5, 5') для відповідної території (S1, S2, S3, S4, S5).
2. Спосіб за п. 1, який відрізняється тим, що дані (L1, L2,...,L19, LV, LV6, LV7, LV8, LG, SZ, SZ') маршрутизації включають географічні базові дані (L1, L2,..., L19), які визначаються за допомогою систем машин (1, 2, 2').
3. Спосіб за пп. 1 або 2, який відрізняється тим, що територію (S1, S2, S3), що підлягає обробці, поділяють на підобласті (В1, В2, B8) на основі даних (L1, L2,..., L14) маршрутизації.
4. Спосіб за п. 3, який відрізняється тим, що через кожну систему машин визначають частковий план маршрутів для певної підобласті (В4, B5, В6, В7, B8) території (S2, S3), що підлягає обробці.
5. Спосіб за одним з пп. 1-4, який відрізняється тим, що системи машин обробляють територію (S5) послідовно одна за одною за часом.
6. Спосіб за одним з пп. 1-4, який відрізняється тим, що системи машин (1, 2, 2') здійснюють обробку території (S2, S3) щонайменше частково паралельно.
7. Спосіб за п. 6, який відрізняється тим, що загальний план маршрутів динамічно змінюють при приєднанні до групи нової системи машин або при залишенні групи однією з систем машин.
8. Спосіб за одним з пп. 1-7, який відрізняється тим, що дані дійсного місцезнаходження окремих систем (1, 2, 2') машин визначають неодноразово та передають їх кожній із групи систем (1, 2, 2') машин.
9. Спосіб за одним з пп. 1-8, який відрізняється тим, що для операторів систем (1, 2) машин за допомогою індикаторного пристрою (9), при необхідності, надають карту, складену на основі базових географічних даних, дійсне місцезнаходження (Р1) і оптимальний маршрут відповідної ї системи (1) машин, а також дійсне місцезнаходження (Р2) решти систем (2) машин групи (G), що знаходяться на території, що підлягає обробці.
10. Спосіб за п. 9, який відрізняється тим, що оператору системи (1, 2) машин вказують маршрути інших систем машин групи, яка знаходиться на території, що підлягає обробці.
11. Спосіб за однім з пп. 1-10, який відрізняється тим, що встановлюють загальний план маршрутів, який містить оптимізовані маршрути (R1 R2, R3, R4, R5), призначені для окремих систем (1, 2 , 2') машин з групи (G) сільськогосподарських машин, і системи (1, 2, 2') машин направляють для обробки території (S1, S2, S3, S4, S5) за призначеними їм відповідними маршрутами (R1, R2, R3, R4, R5).
12. Система маршрутизації для встановлення маршрутного плану для групи (G) систем (1, 2, 2') сільськогосподарських машин для обробки території (S1, S2, S3, S4, S5), яка містить розміщені на різних системах (1, 2, 2') сільськогосподарських машин пристрої (3, 3') для визначення дійсного місцезнаходження (Р1, Р2) відповідних систем (1,2) машин, пристрої (6, 6') для визначення даних маршрутизації пристрої (7, 7') зв'язку для передачі даних (L1, L2,..., L19, LV, LV6, LV7, LV8, LG, SZ, SZ') планування маршрутів, а також щонайменше один пристрій (5, 5') маршрутизації, який для прийому даних (L1, L2,..., L19, LV, LV6, LV7, LV8, Lg, SZ, SZ') сполучений з приймальним блоком (12, 12'), а також з пристроєм для планування маршруту (5,5'), який пов'язаний з координуючим пристроєм (4, 4'), що діє на пристрій для планування маршруту (5, 5'), та координує з пристроями для планування маршруту (5, 5') інші машинні системи (1, 2, 2') всередині групи машинних систем (1, 2, 2') та на основі отриманої інформації про планування маршруту (L1, L2,..., L19, Lv, Lv6, Lv7, Lv8, Lg, SZ, SZ') складається спільний маршрутний план для відповідної території.
Текст
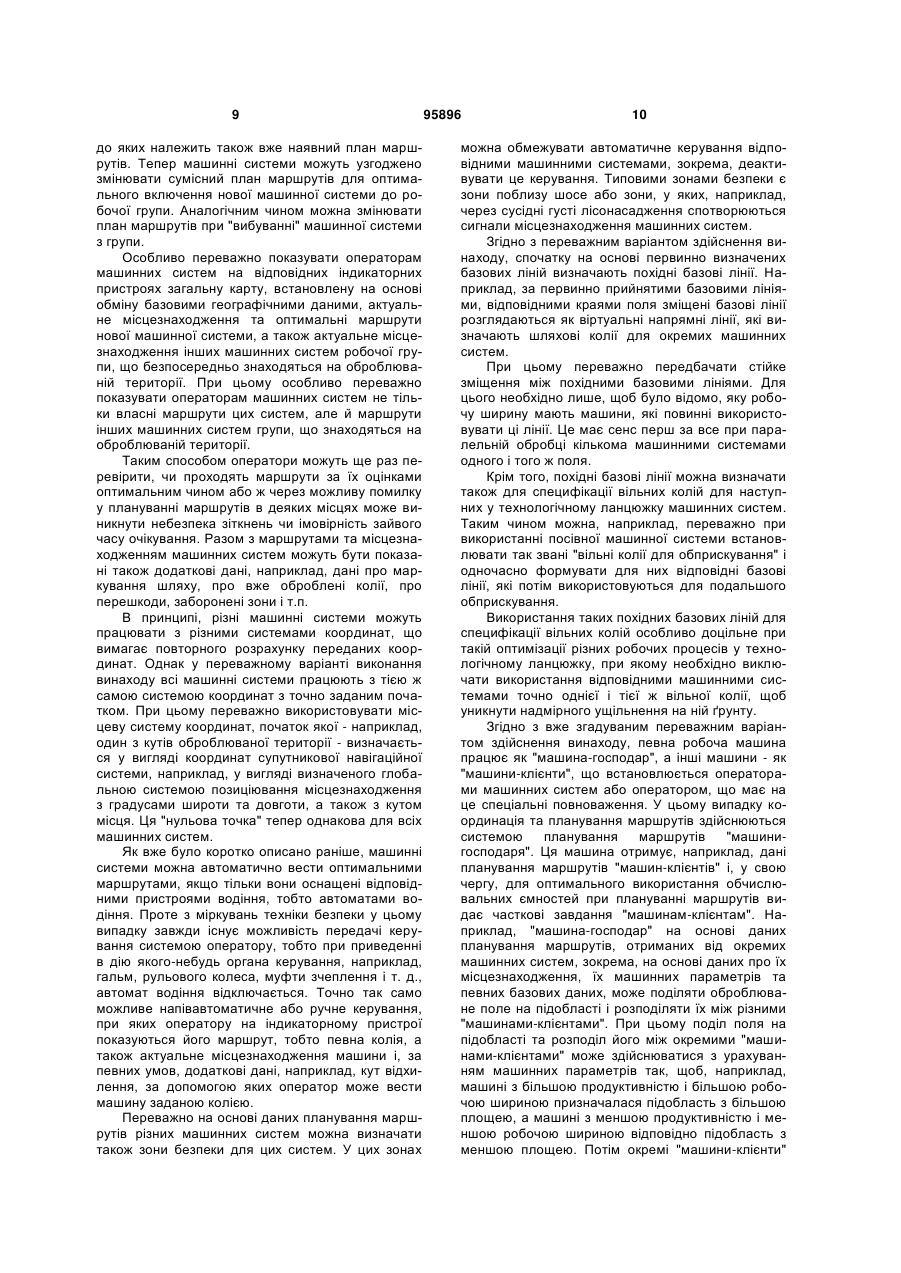
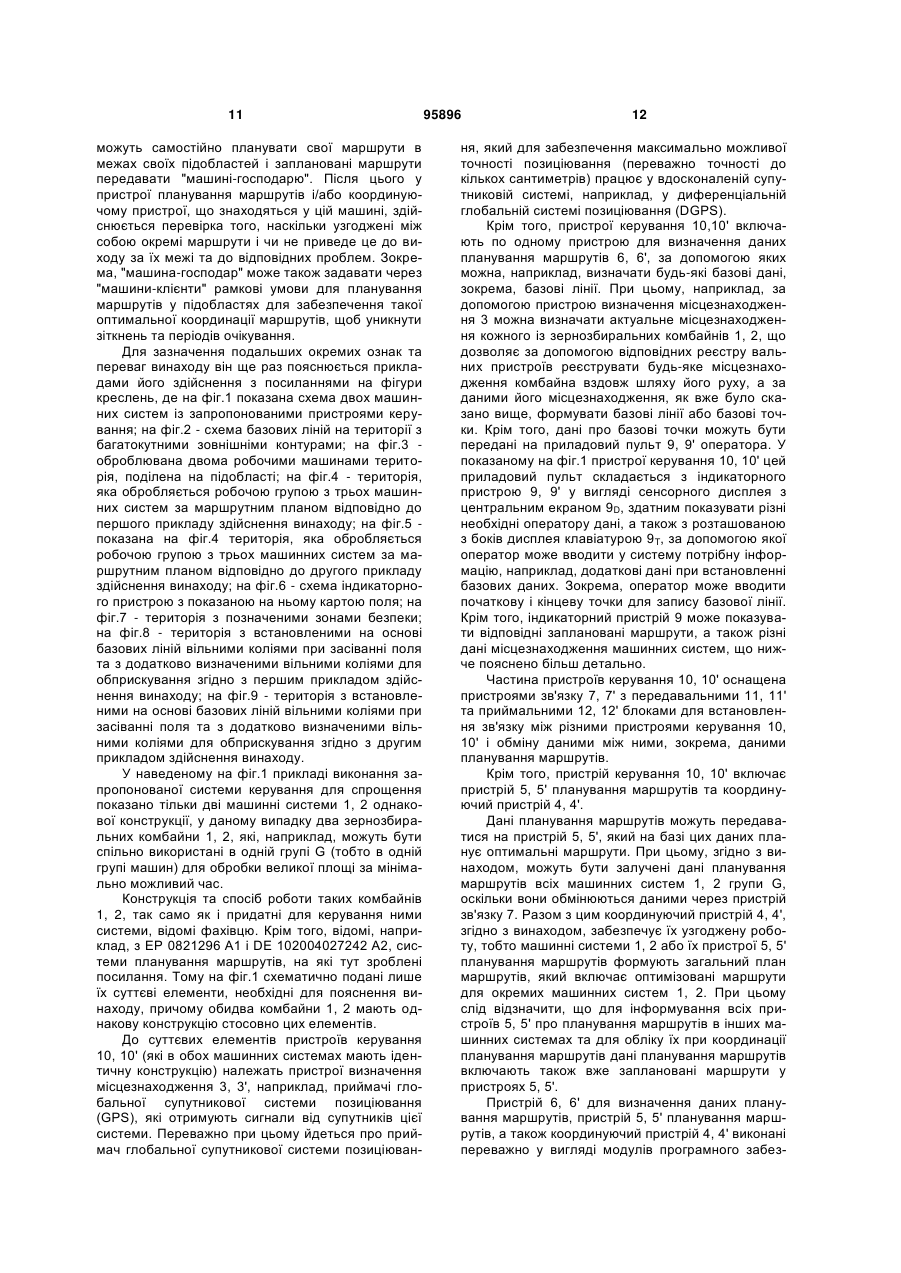
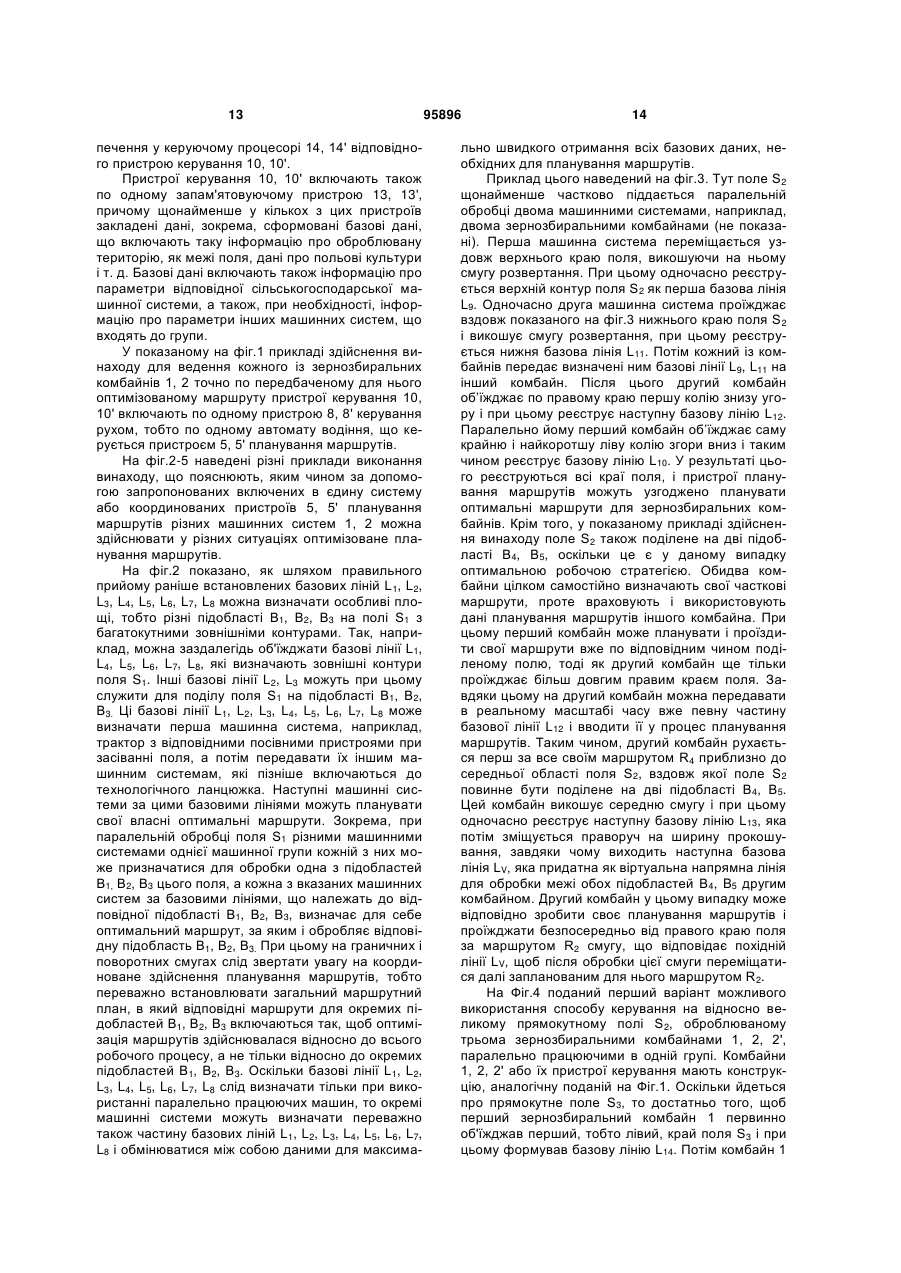
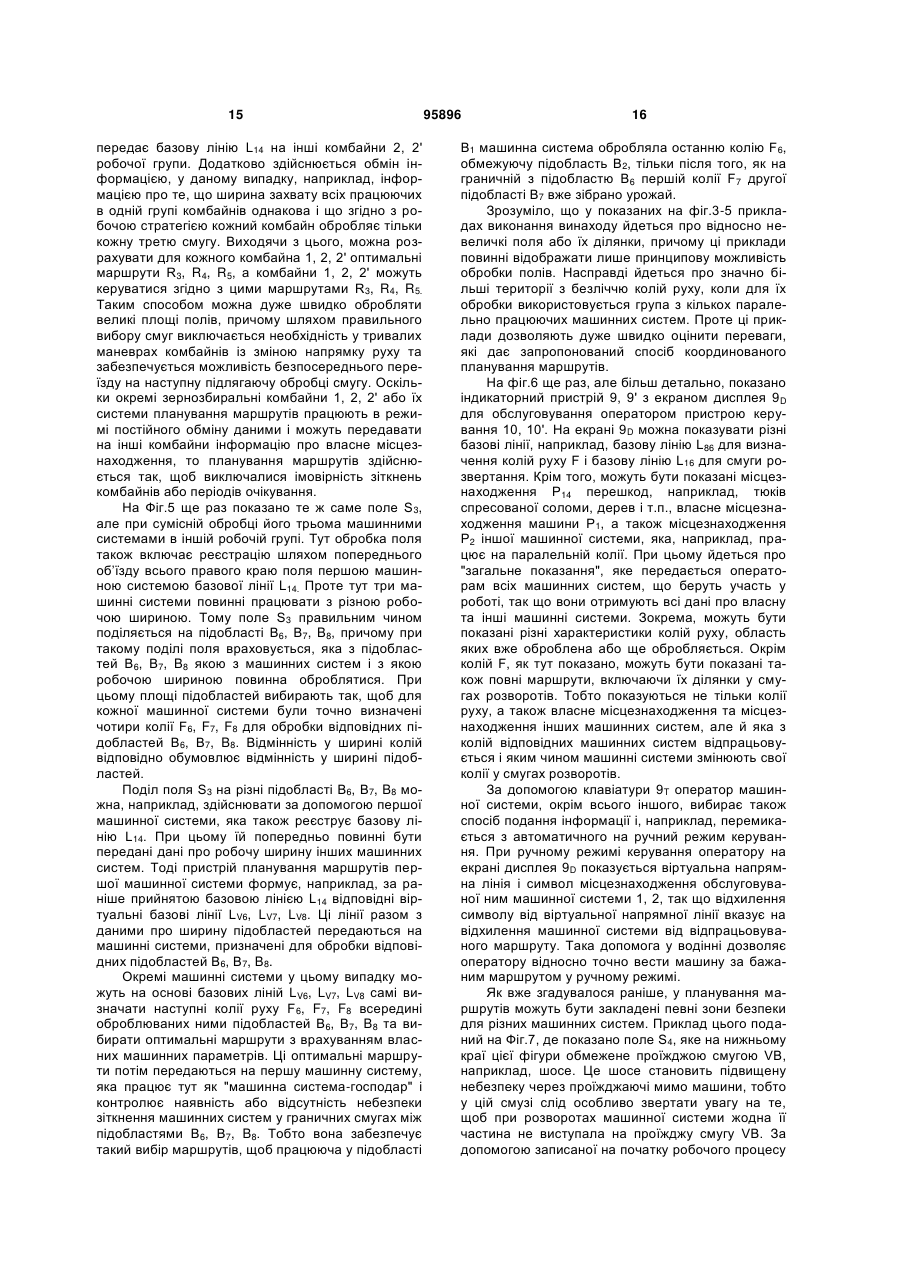
1. Спосіб маршрутизації для групи (G) систем ( 1 , 2 , 2') сільськогосподарських машин для обробки території (S 1 , S2, S3, S4, S5), що підлягає обробці , при якому машинні системи (1, 2, 2') мають відповідно керуючі пристрої (10, 10'), включаючи пристрій для визначення місця знаходження (3,3'), пристрій зв'язку (7, 7'), пристрій для планування маршруту (5, 5'), а також пристрій визначення інформації для планування маршруту (6, 6'), а машинні системи (1, 2, 2') виконані з можливістю обміну інформацією між собою про планування маршруту (L1, L2 ,..., L19, Lv, Lv6, Lv7, Lv8, Lg, SZ, SZ') через пристрій зв'язку (7, 7'), причому спільний план маршруту складається пристроєм для планування маршруту (5, 5') для відповідної території (S 1 , S2, S3, S4, S5). 2. Спосіб за п. 1, який відрізняється тим, що дані (L1, L2,...,L 19 , LV, LV6, LV7, LV8, LG, SZ, SZ') маршрутизації включають географічні базові дані (L1, L2,..., L19), які визначаються за допомогою систем машин ( 1 , 2 , 2'). 3. Спосіб за пп. 1 або 2, який відрізняється тим, що територію (S1, S2, S3), що підлягає обробці, поділяють на підобласті (В 1, В2, B8) на основі даних (L1, L2,..., L14) маршрутизації. 4. Спосіб за п. 3, який відрізняється тим, що через кожну систему машин визначають частковий план маршрутів для певної підобласті (В4, B5, В6, В7, B8) території (S2, S3), що підлягає обробці. 2 (19) 1 3 95896 4 один пристрій (5, 5') маршрутизації, який для прийому даних (L1, L2,..., L19, LV, LV6, LV7, LV8, LG, SZ, SZ') сполучений з приймальним блоком (12, 12'), а також з пристроєм для планування маршруту (5,5'), який пов'язаний з координуючим пристроєм (4, 4'), що діє на пристрій для планування маршруту (5, 5'), та координує з пристроями для планування маршруту (5, 5') інші машинні системи (1, 2, 2') всередині групи машинних систем (1, 2, 2') та на основі отриманої інформації про планування маршруту (L1, L2,..., L19, Lv, Lv6, Lv7, Lv8, Lg, SZ, SZ') складається спільний маршрутний план для відповідної території. Винахід стосується способу маршрутизації (встановлення плану маршрутів) для групи систем сільськогосподарських машин для обробки території. Крім того, винахід стосується системи маршрутизації (планування маршрутів для встановлення відповідного плану маршрутів) для групи систем сільськогосподарських машин для обробки території. Продуктивність сільськогосподарських машинних систем, тобто таких робочих самохідних машин, як зернозбиральні комбайни або польові подрібнювані, тягачі з різного роду навісними знаряддями, зокрема, тукорозкидачами, сівалками, обприскувачами, сіноворушилками, валковими сіноворушилками і т.д., постійно збільшується. Тому останнім часом все більшого значення набуває планування робочих процесів. Зокрема, при збиранні врожаю погодні умови часто залишають досить обмежені терміни для окремих робочих процесів, які використовуються неоптимальним чином передусім через недостатнє планування їх застосування. Разом з цим точне планування робочих процесів має велике значення для практичного досягнення теоретично можливої максимальної продуктивності машин. Для досягнення оптимального проведення робочих процесів розробляються системи та способи так званого планування маршрутів, за допомогою яких для відповідних машинних систем визначають оптимальні маршрути при обробці відповідних територій, наприклад, сільськогосподарських полів. При цьому відповідна машинна система залежно від її конструкції може рухатися за заданим маршрутом у повністю автоматичному, напівавтоматичному або ручному режимі. Зазвичай такі системи планування маршрутів і автомати водіння працюють за допомогою супутникових навігаційних пристроїв, наприклад, за допомогою приймачів глобальної системи позиціювання (GPS). Для підвищення точності вказаних систем існують різні способи корегування маршрутів, наприклад, для способів, заснованих на глобальній системі позиціювання, використовується так звана диференціальна глобальна система позиціювання (DGPS). Система планування маршрутів описана, наприклад, в ЕР 0821296 А2. Тут шляхом об'їзду периметра поля робочою машиною з приладом глобальної системи позиціювання реєструють координати периметра поля і доповнюють їх інформацією про специфічні параметри робочої машини. За допомогою електронного пристрою обробки даних з використанням певного обчислювального алгоритму формують шлях обробки поля у вигляді оцифрованого маршруту машини, при цьому вра ховують певний критерій оптимізації маршруту. Типові критерії оптимізації можуть полягати у зведенні до мінімуму необхідних допоміжних проїздів, наприклад, довжини поворотів на кінцях поля, відстані поїздок для спорожнення комбайна і т.д. Інший критерій оптимізації може полягати у зведенні до мінімуму сумарного часу обробки певного поля, причому за відомих умов доводиться приймати як неминучість дещо великі довжини поворотів, які, проте, слід проходити швидше. Точно так само для досягнення оптимального компромісу між різними умовами оптимізації здійснюється оптимізація стосовно деяких інших критеріїв. У більшості випадків корисні сільськогосподарські площі обробляються кількома машинними системами. Це означає, що обробку полів здійснюють цілою групою сільськогосподарських машинних систем, які можуть послідовно включатися в роботу одна за одною згідно з технологічним ланцюжком, як це має місце при використанні сівалок і наступних машинних систем для обприскування та внесення добрив, або ж працювати паралельно, як, наприклад, у випадку використання кількох збиральних машин, які у складі однієї робочої групи збирають урожай на великій площі. В принципі ці різні машинні системи - якщо вони оснащені відповідними системами планування маршрутів та системами автоматизації - розраховують самі для себе ідеальні маршрути, які потім відпрацьовують. Однак це перш за все вимагає, щоб кожна машинна система визначала щонайменше зовнішній контур оброблюваної території, наприклад, шляхом одноразового його об'їзду. Такий процес відносно тривалий. Хоча, як це описано у ЕР 0821296В1 та у DE 10 2004 0720242 1, існує можливість використання системою планування маршрутів вже встановлених для іншого призначення. Проте це можливе тільки у тому випадку, якщо йдеться про однотипові машинні системи або машинні системи з такими однаковими чи дуже схожими робочими параметрами, як, наприклад, робоча ширина, радіус повороту і т. д. Все це обумовлює проблеми при одночасній роботі кількох машинних систем на одному полі, яке, як правило, має велику площу. У цьому випадку при відпрацюванні маршруту оператору машинної системи необхідно звертати увагу на те, щоб при перетині маршрутів не відбувалися зіткнення з іншими машинними системами. За відомих умов доводиться використовувати час очікування для виключення небезпеки зіткнень або час очікування на допоміжні машини, наприклад, на вивантажувальні засоби, що спільно використовуються 5 при роботі кількох зернозбиральних комбайнів. Крім того, при обробці великих площ досить значних витрат часу потребують як отримання необхідних базових ліній або інших географічних даних для планування маршрутів, так і встановлення повного плану маршрутів. Тому в основу винаходу поставлена задача такого удосконалення способу встановлення плану маршрутів для групи сільськогосподарських машинних систем і відповідної системи планування маршрутів, яке дозволило б уникнути зазначених вище проблем. Поставлена задача вирішується способом і системою планування маршрутів. Відповідно до запропонованого способу, окремі сільськогосподарські машинні системи мають власні пристрої для визначення даних планування маршрутів і обмінюються цими даними між собою. При цьому на основі обміну даними планування маршрутів встановлюється загальний план маршрутів. При такому обміні даними може йтися про звичайні базові дані, наприклад, про базові лінії, межі полів, маркування шляхів, перешкоди і т.д. Проте при цьому може йтися також про відпрацьовані або заплановані власні (оптимізовані) часткові маршрути, про експлуатаційні дані, наприклад, дані про вид використання машинних систем та дані про польові культури, тобто про властивості цих культур, і їх впливи на відповідну машинну систему, а також про параметри машин, наприклад, про робочу ширину, радіус поворотів і т.д. Використання запропонованого способу при спільній роботі машинних систем дозволяє швидко та економічно встановлювати план маршрутів для всієї території. Загальний план маршрутів у цьому випадку доступний для всіх спільно працюючих машинних систем і переважно для інших машинних систем, які можуть використовуватися згодом. Для побудови запропонованої системи планування маршрутів, яка здійснює запропонований спосіб, сільськогосподарські машинні системи повинні мати наступні елементи: - пристрої позиціювання для визначення актуального місцезнаходження відповідних машинних систем; - пристрої для визначення даних планування маршрутів, які можуть надавати необхідні дані для планування маршрутів, наприклад, шляхом автоматичної реєстрації даних місцезнаходження машинних систем, а також інших даних, і/або шляхом їх введення оператором; - пристрої зв'язку для передачі даних планування маршрутів іншим машинним системам. Крім того, потрібен щонайменше один пристрій, який для прийому даних планування маршрутів сполучений з приймальним блоком, щоб на основі прийнятих даних планування маршрутів встановлювати загальний план маршрутів для відповідної території. При цьому окремі сільськогосподарські машинні системи переважно мають власні пристрої для планування маршрутів і можуть приймати та обробляти дані планування маршрутів інших машинних систем. У цьому випадку загальний план 95896 6 планування маршрутів можна встановлювати за допомогою пристроїв планування маршрутів на основі даних, отриманих при обміні. Для цього необхідно, щоб кожна із сільськогосподарських машинних систем була оснащена сполученим з пристроєм планування маршрутів координуючим пристроєм, який таким чином впливає на кожний із пристроїв планування маршрутів, щоб у злагодженій роботі з пристроями планування маршрутів інших машинних систем всередині їх групи встановлювати загальний план маршрутів на основі отриманих при обміні даних. Однак, в принципі, окремі машинні системи можуть також спочатку передавати всі свої дані планування маршрутів на центральний пристрій планування маршрутів, який потім встановлює загальний план маршрутів. Що стосується центрального пристрою планування маршрутів, то тут йдеться переважно про пристрій планування маршрутів на одній з машинних систем, яка у цьому випадку приймає на себе як "машина-господар" функцію планування маршрутів. Запропонований спосіб встановлення загального плану маршрутів переважно використовується для керування групою сільськогосподарських машинних систем при обробці території. При цьому загальний для всіх машинних систем план маршрутів містить оптимізовані маршрути для окремих машинних систем. У цьому випадку рух машинних систем заданими маршрутами відомим чином може проводитися в автоматичному, напівавтоматичному або ручному режимі, що більш докладно описано нижче. Для забезпечення можливості здійснення такого способу керування машинними системами пристрою планування маршрутів сільськогосподарських машинних систем і пов'язані з ними координуючі пристрої повинні бути виконані так, щоб загальний для всіх машинних систем план маршрутів для обробки території містив оптимізовані маршрути для окремих машинних систем. Крім того, у цьому випадку окремі машинні системи переважно повинні містити разом з вже вказаними раніше елементами по одному пристрою керування водінням (автомату водіння) і/або індикаторний блок для ведення машинної системи за маршрутом залежно від того, в якому режимі здійснюється керування нею - в автоматичному, напівавтоматичному чи ручному. Об'єднання в одну мережу різних систем планування маршрутів і постійний обмін даними між ними дозволяють індивідуально визначати для кожної окремої машинної системи оптимальні маршрути, причому у стратегії оптимізації маршрутів враховуються й інші машини. Це значить, що оптимізація маршрутів вже не орієнтована на окрему машину, а враховує увесь процес обробки території, зокрема, всі машинні системи, послідовно або паралельно обробляючі одну і ту ж саму територію, що дозволяє оптимізувати увесь процес її обробки. При цьому ефективно виключаються небезпека зіткнення паралельно працюючих машин і зайві періоди очікування ресурсів та інших машин. При цьому для зв'язку між машинними системами можуть бути використані будь-які двосто 7 ронні системи зв'язку з відомими передавальними та приймальними пристроями, зокрема, радіосистеми, які можна використовувати для переговорів. Можливе також використання мобільних радіомереж і т. п. Як вже було описано, дані планування маршрутів включають переважно такі географічні базові дані, як, наприклад, різні базові лінії, які дають інформацію про периметри полів або місцезнаходження перешкод і т. д. Ці дані переважно визначаються за допомогою самих машинних систем. Для запису базових ліній існують різні можливості. Наприклад, оператор може при об'їзді базового відрізка шляху за приладовим пультом встановити спочатку його початкову точку і точно так само кінцеву точку при досягненні кінця базового відрізка шляху. При цьому за базовий відрізок може служити пряма лінія, проведена між початковою і кінцевою точками шляху. Це може мати місце, наприклад, тоді, коли йдеться про прямий край поля або про лінію на цьому полі, вздовж якої поле слід поділяти на підобласті. Проте так само може бути здійснений "контурний модус", при якому, як правило, між початковоюі кінцевою точками базового відрізка включаються і реєструються координати місцезнаходження машини і цим реєструється точний контур відпрацьованого базового відрізка, який можна використовувати як базову лінію. Як альтернатива, задають тільки початкову точку, а потім відпрацьовують певну довжину відрізка. Що стосується базової лінії, то, як було описане раніше, йдеться про окремий відрізок шляху, наприклад, про край поля. Проте базова лінія може бути складена з кількох часткових відрізків, причому ці окремі часткові відрізки можна розглядати як окремі базові лінії. Існує принципова можливість послідовної обробки території першою і другою машинними системами, тобто тут йдеться про включені у технологічний ланцюжок машинні системи, наприклад, про сівалку і польовий обприскувач або про косарку з веденою слідом за нею сіноворушилкою. Спосіб переважно використовують також у тому випадку, коли перша і друга машинні системи здійснюють, щонайменше час від часу, паралельну обробку території, як це має місце, наприклад, при використанні групи машин, які паралельно обробляють територію великої площі. При цьому окремі машинні системи можуть належати до одного і того ж виду, наприклад, до кількох зернозбиральних комбайнів або кількох польових подрібнювачів - так само одного і того ж типу. Зокрема, якщо кілька машин одночасно або з частковим зміщенням у часі спільно обробляють територію, то передача всіх даних, перш за все базових ліній, повинна динамічно проводитися у процесі спільної роботи, тобто як тільки одна з машинних систем визначає нові базові дані, вони негайно ж повинні передаватися на інші машинні системи. При цьому передача даних може проводитися автоматично машинною системою, хоча допускається їх передача також і оператором відповідної машини. Проте можна також припиняти 95896 8 передачу або прийом нових базових даних або ж здійснювати їх з уповільненням. Запропонований спосіб також забезпечує можливість відпрацювання машинними системами однієї частини необхідного відрізка шляху, зокрема, на початку паралельного їх використання, і можливість двосторонньої їх передачі для максимально швидкого отримання всіх необхідних базових даних. Наприклад, одна машинна система може об'їжджати правий верхній край поля, тоді як інша машинна система у цей час об'їжджає лівий нижній край поля. Специфікована базовими даними оброблювана територія може потім, наприклад, на основі даних планування маршрутів, також поділятися на підобласті. Це може бути використане, зокрема, при одночасній обробці території групою із кількох машинних систем, якщо йдеться про ділянку поля, що має дуже неправильну форму. У цьому випадку, наприклад, кілька різних машинних систем визначають також окремий частковий план маршрутів. Це дає ту перевагу, що кожний з пристроїв планування маршрутів може у "своїй підобласті" відносно вільно оптимізувати маршрут для своєї машинної системи без врахування інших машинних систем. У цьому випадку точна координація планування відрізків шляху в основному необхідна лише у коліях, якими підобласті межують одна з одною, а також у спільно використовуваній смузі розвертання або на ділянках спільно використовуваних ресурсів. Особливо переважним є повторне, тобто постійне або періодичне визначення актуальних географічних даних місцезнаходження окремих машинних систем, які передаються на решту машинних систем. Це забезпечує особливі переваги при паралельній роботі кількох машин на одному полі, оскільки у цьому випадку всі машинні системи знають, де знаходяться вони самі і де знаходяться інші машинні системи. Це дозволяє надійно уникати зіткнень, наприклад, шляхом задавання безпечних відстаней між машинними системами та шляхом аварійних відключень при виході за межі вказаних відстаней. У ще одній особливо переважній формі виконання запропонованого способу здійснюють динамічну зміну плану маршрутів при приєднанні до групи нової машинної системи або при залишенні її однією з машинних систем. При такій зміні плану маршрутів до робочої групи будь-який час можуть приєднуватися нові машинні системи або деякі машинні системи можуть її залишати через поломки, що виникли, або через те, що вони потрібні у якому-небудь іншому місці. При включенні до групи нової машинної системи вона повинна лише встановити зв'язок з іншими машинними системами і "доповісти" про себе у групі шляхом передачі даних про свої вже наявні дані планування маршрутів, причому у найпростішому випадку маються на увазі дані про її власне місцезнаходження, про власні машинні параметри, а також інформацію про те, що ця машинна система повинна брати участь у відповідному робочому процесі. Після цього вказана машинна система одержує від інших машинних систем їхні дані планування маршрутів, 9 до яких належить також вже наявний план маршрутів. Тепер машинні системи можуть узгоджено змінювати сумісний план маршрутів для оптимального включення нової машинної системи до робочої групи. Аналогічним чином можна змінювати план маршрутів при "вибуванні" машинної системи з групи. Особливо переважно показувати операторам машинних систем на відповідних індикаторних пристроях загальну карту, встановлену на основі обміну базовими географічними даними, актуальне місцезнаходження та оптимальні маршрути нової машинної системи, а також актуальне місцезнаходження інших машинних систем робочої групи, що безпосередньо знаходяться на оброблюваній території. При цьому особливо переважно показувати операторам машинних систем не тільки власні маршрути цих систем, але й маршрути інших машинних систем групи, що знаходяться на оброблюваній території. Таким способом оператори можуть ще раз перевірити, чи проходять маршрути за їх оцінками оптимальним чином або ж через можливу помилку у плануванні маршрутів в деяких місцях може виникнути небезпека зіткнень чи імовірність зайвого часу очікування. Разом з маршрутами та місцезнаходженням машинних систем можуть бути показані також додаткові дані, наприклад, дані про маркування шляху, про вже оброблені колії, про перешкоди, заборонені зони і т.п. В принципі, різні машинні системи можуть працювати з різними системами координат, що вимагає повторного розрахунку переданих координат. Однак у переважному варіанті виконання винаходу всі машинні системи працюють з тією ж самою системою координат з точно заданим початком. При цьому переважно використовувати місцеву систему координат, початок якої - наприклад, один з кутів оброблюваної території - визначається у вигляді координат супутникової навігаційної системи, наприклад, у вигляді визначеного глобальною системою позиціювання місцезнаходження з градусами широти та довготи, а також з кутом місця. Ця "нульова точка" тепер однакова для всіх машинних систем. Як вже було коротко описано раніше, машинні системи можна автоматично вести оптимальними маршрутами, якщо тільки вони оснащені відповідними пристроями водіння, тобто автоматами водіння. Проте з міркувань техніки безпеки у цьому випадку завжди існує можливість передачі керування системою оператору, тобто при приведенні в дію якого-небудь органа керування, наприклад, гальм, рульового колеса, муфти зчеплення і т. д., автомат водіння відключається. Точно так само можливе напівавтоматичне або ручне керування, при яких оператору на індикаторному пристрої показуються його маршрут, тобто певна колія, а також актуальне місцезнаходження машини і, за певних умов, додаткові дані, наприклад, кут відхилення, за допомогою яких оператор може вести машину заданою колією. Переважно на основі даних планування маршрутів різних машинних систем можна визначати також зони безпеки для цих систем. У цих зонах 95896 10 можна обмежувати автоматичне керування відповідними машинними системами, зокрема, деактивувати це керування. Типовими зонами безпеки є зони поблизу шосе або зони, у яких, наприклад, через сусідні густі лісонасадження спотворюються сигнали місцезнаходження машинних систем. Згідно з переважним варіантом здійснення винаходу, спочатку на основі первинно визначених базових ліній визначають похідні базові лінії. Наприклад, за первинно прийнятими базовими лініями, відповідними краями поля зміщені базові лінії розглядаються як віртуальні напрямні лінії, які визначають шляхові колії для окремих машинних систем. При цьому переважно передбачати стійке зміщення між похідними базовими лініями. Для цього необхідно лише, щоб було відомо, яку робочу ширину мають машини, які повинні використовувати ці лінії. Це має сенс перш за все при паралельній обробці кількома машинними системами одного і того ж поля. Крім того, похідні базові лінії можна визначати також для специфікації вільних колій для наступних у технологічному ланцюжку машинних систем. Таким чином можна, наприклад, переважно при використанні посівної машинної системи встановлювати так звані "вільні колії для обприскування" і одночасно формувати для них відповідні базові лінії, які потім використовуються для подальшого обприскування. Використання таких похідних базових ліній для специфікації вільних колій особливо доцільне при такій оптимізації різних робочих процесів у технологічному ланцюжку, при якому необхідно виключати використання відповідними машинними системами точно однієї і тієї ж вільної колії, щоб уникнути надмірного ущільнення на ній ґрунту. Згідно з вже згадуваним переважним варіантом здійснення винаходу, певна робоча машина працює як "машина-господар", а інші машини - як "машини-клієнти", що встановлюється операторами машинних систем або оператором, що має на це спеціальні повноваження. У цьому випадку координація та планування маршрутів здійснюються системою планування маршрутів "машинигосподаря". Ця машина отримує, наприклад, дані планування маршрутів "машин-клієнтів" і, у свою чергу, для оптимального використання обчислювальних ємностей при плануванні маршрутів видає часткові завдання "машинам-клієнтам". Наприклад, "машина-господар" на основі даних планування маршрутів, отриманих від окремих машинних систем, зокрема, на основі даних про їх місцезнаходження, їх машинних параметрів та певних базових даних, може поділяти оброблюване поле на підобласті і розподіляти їх між різними "машинами-клієнтами". При цьому поділ поля на підобласті та розподіл його між окремими "машинами-клієнтами" може здійснюватися з урахуванням машинних параметрів так, щоб, наприклад, машині з більшою продуктивністю і більшою робочою шириною призначалася підобласть з більшою площею, а машині з меншою продуктивністю і меншою робочою шириною відповідно підобласть з меншою площею. Потім окремі "машини-клієнти" 11 можуть самостійно планувати свої маршрути в межах своїх підобластей і заплановані маршрути передавати "машині-господарю". Після цього у пристрої планування маршрутів і/або координуючому пристрої, що знаходяться у цій машині, здійснюється перевірка того, наскільки узгоджені між собою окремі маршрути і чи не приведе це до виходу за їх межі та до відповідних проблем. Зокрема, "машина-господар" може також задавати через "машини-клієнти" рамкові умови для планування маршрутів у підобластях для забезпечення такої оптимальної координації маршрутів, щоб уникнути зіткнень та періодів очікування. Для зазначення подальших окремих ознак та переваг винаходу він ще раз пояснюється прикладами його здійснення з посиланнями на фігури креслень, де на фіг.1 показана схема двох машинних систем із запропонованими пристроями керування; на фіг.2 - схема базових ліній на території з багатокутними зовнішніми контурами; на фіг.3 оброблювана двома робочими машинами територія, поділена на підобласті; на фіг.4 - територія, яка обробляється робочою групою з трьох машинних систем за маршрутним планом відповідно до першого прикладу здійснення винаходу; на фіг.5 показана на фіг.4 територія, яка обробляється робочою групою з трьох машинних систем за маршрутним планом відповідно до другого прикладу здійснення винаходу; на фіг.6 - схема індикаторного пристрою з показаною на ньому картою поля; на фіг.7 - територія з позначеними зонами безпеки; на фіг.8 - територія з встановленими на основі базових ліній вільними коліями при засіванні поля та з додатково визначеними вільними коліями для обприскування згідно з першим прикладом здійснення винаходу; на фіг.9 - територія з встановленими на основі базових ліній вільними коліями при засіванні поля та з додатково визначеними вільними коліями для обприскування згідно з другим прикладом здійснення винаходу. У наведеному на фіг.1 прикладі виконання запропонованої системи керування для спрощення показано тільки дві машинні системи 1, 2 однакової конструкції, у даному випадку два зернозбиральних комбайни 1, 2, які, наприклад, можуть бути спільно використані в одній групі G (тобто в одній групі машин) для обробки великої площі за мінімально можливий час. Конструкція та спосіб роботи таких комбайнів 1, 2, так само як і придатні для керування ними системи, відомі фахівцю. Крім того, відомі, наприклад, з ЕР 0821296 А1 і DE 102004027242 А2, системи планування маршрутів, на які тут зроблені посилання. Тому на фіг.1 схематично подані лише їх суттєві елементи, необхідні для пояснення винаходу, причому обидва комбайни 1, 2 мають однакову конструкцію стосовно цих елементів. До суттєвих елементів пристроїв керування 10, 10' (які в обох машинних системах мають ідентичну конструкцію) належать пристрої визначення місцезнаходження 3, 3', наприклад, приймачі глобальної супутникової системи позиціювання (GPS), які отримують сигнали від супутників цієї системи. Переважно при цьому йдеться про приймач глобальної супутникової системи позиціюван 95896 12 ня, який для забезпечення максимально можливої точності позиціювання (переважно точності до кількох сантиметрів) працює у вдосконаленій супутниковій системі, наприклад, у диференціальній глобальній системі позиціювання (DGPS). Крім того, пристрої керування 10,10' включають по одному пристрою для визначення даних планування маршрутів 6, 6', за допомогою яких можна, наприклад, визначати будь-які базові дані, зокрема, базові лінії. При цьому, наприклад, за допомогою пристрою визначення місцезнаходження 3 можна визначати актуальне місцезнаходження кожного із зернозбиральних комбайнів 1, 2, що дозволяє за допомогою відповідних реєстру вальних пристроїв реєструвати будь-яке місцезнаходження комбайна вздовж шляху його руху, а за даними його місцезнаходження, як вже було сказано вище, формувати базові лінії або базові точки. Крім того, дані про базові точки можуть бути передані на приладовий пульт 9, 9' оператора. У показаному на фіг.1 пристрої керування 10, 10' цей приладовий пульт складається з індикаторного пристрою 9, 9' у вигляді сенсорного дисплея з центральним екраном 9D, здатним показувати різні необхідні оператору дані, а також з розташованою з боків дисплея клавіатурою 9T, за допомогою якої оператор може вводити у систему потрібну інформацію, наприклад, додаткові дані при встановленні базових даних. Зокрема, оператор може вводити початкову і кінцеву точки для запису базової лінії. Крім того, індикаторний пристрій 9 може показувати відповідні заплановані маршрути, а також різні дані місцезнаходження машинних систем, що нижче пояснено більш детально. Частина пристроїв керування 10, 10' оснащена пристроями зв'язку 7, 7' з передавальними 11, 11' та приймальними 12, 12' блоками для встановлення зв'язку між різними пристроями керування 10, 10' і обміну даними між ними, зокрема, даними планування маршрутів. Крім того, пристрій керування 10, 10' включає пристрій 5, 5' планування маршрутів та координуючий пристрій 4, 4'. Дані планування маршрутів можуть передаватися на пристрій 5, 5', який на базі цих даних планує оптимальні маршрути. При цьому, згідно з винаходом, можуть бути залучені дані планування маршрутів всіх машинних систем 1, 2 групи G, оскільки вони обмінюються даними через пристрій зв'язку 7. Разом з цим координуючий пристрій 4, 4', згідно з винаходом, забезпечує їх узгоджену роботу, тобто машинні системи 1, 2 або їх пристрої 5, 5' планування маршрутів формують загальний план маршрутів, який включає оптимізовані маршрути для окремих машинних систем 1, 2. При цьому слід відзначити, що для інформування всіх пристроїв 5, 5' про планування маршрутів в інших машинних системах та для обліку їх при координації планування маршрутів дані планування маршрутів включають також вже заплановані маршрути у пристроях 5, 5'. Пристрій 6, 6' для визначення даних планування маршрутів, пристрій 5, 5' планування маршрутів, а також координуючий пристрій 4, 4' виконані переважно у вигляді модулів програмного забез 13 печення у керуючому процесорі 14, 14' відповідного пристрою керування 10, 10'. Пристрої керування 10, 10' включають також по одному запам'ятовуючому пристрою 13, 13', причому щонайменше у кількох з цих пристроїв закладені дані, зокрема, сформовані базові дані, що включають таку інформацію про оброблювану територію, як межі поля, дані про польові культури і т. д. Базові дані включають також інформацію про параметри відповідної сільськогосподарської машинної системи, а також, при необхідності, інформацію про параметри інших машинних систем, що входять до групи. У показаному на фіг.1 прикладі здійснення винаходу для ведення кожного із зернозбиральних комбайнів 1, 2 точно по передбаченому для нього оптимізованому маршруту пристрої керування 10, 10' включають по одному пристрою 8, 8' керування рухом, тобто по одному автомату водіння, що керується пристроєм 5, 5' планування маршрутів. На фіг.2-5 наведені різні приклади виконання винаходу, що пояснюють, яким чином за допомогою запропонованих включених в єдину систему або координованих пристроїв 5, 5' планування маршрутів різних машинних систем 1, 2 можна здійснювати у різних ситуаціях оптимізоване планування маршрутів. На фіг.2 показано, як шляхом правильного прийому раніше встановлених базових ліній L1, L2, L3, L4, L5, L6, L7, L8 можна визначати особливі площі, тобто різні підобласті В1, В2, В3 на полі S1 з багатокутними зовнішніми контурами. Так, наприклад, можна заздалегідь об'їжджати базові лінії L1, L4, L5, L6, L7, L8, які визначають зовнішні контури поля S1. Інші базові лінії L2, L3 можуть при цьому служити для поділу поля S1 на підобласті В1, В2, В3. Ці базові лінії L1, L2, L3, L4, L5, L6, L7, L8 може визначати перша машинна система, наприклад, трактор з відповідними посівними пристроями при засіванні поля, а потім передавати їх іншим машинним системам, які пізніше включаються до технологічного ланцюжка. Наступні машинні системи за цими базовими лініями можуть планувати свої власні оптимальні маршрути. Зокрема, при паралельній обробці поля S1 різними машинними системами однієї машинної групи кожній з них може призначатися для обробки одна з підобластей В1, В2, В3 цього поля, а кожна з вказаних машинних систем за базовими лініями, що належать до відповідної підобласті В1, В2, В3, визначає для себе оптимальний маршрут, за яким і обробляє відповідну підобласть В1, В2, В3. При цьому на граничних і поворотних смугах слід звертати увагу на координоване здійснення планування маршрутів, тобто переважно встановлювати загальний маршрутний план, в який відповідні маршрути для окремих підобластей В1, В2, В3 включаються так, щоб оптимізація маршрутів здійснювалася відносно до всього робочого процесу, а не тільки відносно до окремих підобластей В1, В2, В3. Оскільки базові лінії L1, L2, L3, L4, L5, L6, L7, L8 слід визначати тільки при використанні паралельно працюючих машин, то окремі машинні системи можуть визначати переважно також частину базових ліній L1, L2, L3, L4, L5, L6, L7, L8 і обмінюватися між собою даними для максима 95896 14 льно швидкого отримання всіх базових даних, необхідних для планування маршрутів. Приклад цього наведений на фіг.3. Тут поле S2 щонайменше частково піддається паралельній обробці двома машинними системами, наприклад, двома зернозбиральними комбайнами (не показані). Перша машинна система переміщається уздовж верхнього краю поля, викошуючи на ньому смугу розвертання. При цьому одночасно реєструється верхній контур поля S2 як перша базова лінія L9. Одночасно друга машинна система проїжджає вздовж показаного на фіг.3 нижнього краю поля S2 і викошує смугу розвертання, при цьому реєструється нижня базова лінія L11. Потім кожний із комбайнів передає визначені ним базові лінії L9, L11 на інший комбайн. Після цього другий комбайн об’їжджає по правому краю першу колію знизу угору і при цьому реєструє наступну базову лінію L12. Паралельно йому перший комбайн об’їжджає саму крайню і найкоротшу ліву колію згори вниз і таким чином реєструє базову лінію L10. У результаті цього реєструються всі краї поля, і пристрої планування маршрутів можуть узгоджено планувати оптимальні маршрути для зернозбиральних комбайнів. Крім того, у показаному прикладі здійснення винаходу поле S2 також поділене на дві підобласті В4, В5, оскільки це є у даному випадку оптимальною робочою стратегією. Обидва комбайни цілком самостійно визначають свої часткові маршрути, проте враховують і використовують дані планування маршрутів іншого комбайна. При цьому перший комбайн може планувати і проїздити свої маршрути вже по відповідним чином поділеному полю, тоді як другий комбайн ще тільки проїжджає більш довгим правим краєм поля. Завдяки цьому на другий комбайн можна передавати в реальному масштабі часу вже певну частину базової лінії L12 і вводити її у процес планування маршрутів. Таким чином, другий комбайн рухається перш за все своїм маршрутом R4 приблизно до середньої області поля S2, вздовж якої поле S2 повинне бути поділене на дві підобласті В4, В5. Цей комбайн викошує середню смугу і при цьому одночасно реєструє наступну базову лінію L13, яка потім зміщується праворуч на ширину прокошування, завдяки чому виходить наступна базова лінія LV, яка придатна як віртуальна напрямна лінія для обробки межі обох підобластей В4, B5 другим комбайном. Другий комбайн у цьому випадку може відповідно зробити своє планування маршрутів і проїжджати безпосередньо від правого краю поля за маршрутом R2 смугу, що відповідає похідній лінії LV, щоб після обробки цієї смуги переміщатися далі запланованим для нього маршрутом R2. На Фіг.4 поданий перший варіант можливого використання способу керування на відносно великому прямокутному полі S2, оброблюваному трьома зернозбиральними комбайнами 1, 2, 2', паралельно працюючими в одній групі. Комбайни 1, 2, 2' або їх пристрої керування мають конструкцію, аналогічну поданій на Фіг.1. Оскільки йдеться про прямокутне поле S3, то достатньо того, щоб перший зернозбиральний комбайн 1 первинно об'їжджав перший, тобто лівий, край поля S3 і при цьому формував базову лінію L14. Потім комбайн 1 15 передає базову лінію L14 на інші комбайни 2, 2' робочої групи. Додатково здійснюється обмін інформацією, у даному випадку, наприклад, інформацією про те, що ширина захвату всіх працюючих в одній групі комбайнів однакова і що згідно з робочою стратегією кожний комбайн обробляє тільки кожну третю смугу. Виходячи з цього, можна розрахувати для кожного комбайна 1, 2, 2' оптимальні маршрути R3, R4, R5, а комбайни 1, 2, 2' можуть керуватися згідно з цими маршрутами R3, R4, R5. Таким способом можна дуже швидко обробляти великі площі полів, причому шляхом правильного вибору смуг виключається необхідність у тривалих маневрах комбайнів із зміною напрямку руху та забезпечується можливість безпосереднього переїзду на наступну підлягаючу обробці смугу. Оскільки окремі зернозбиральні комбайни 1, 2, 2' або їх системи планування маршрутів працюють в режимі постійного обміну даними і можуть передавати на інші комбайни інформацію про власне місцезнаходження, то планування маршрутів здійснюється так, щоб виключалися імовірність зіткнень комбайнів або періодів очікування. На Фіг.5 ще раз показано те ж саме поле S3, але при сумісній обробці його трьома машинними системами в іншій робочій групі. Тут обробка поля також включає реєстрацію шляхом попереднього об’їзду всього правого краю поля першою машинною системою базової лінії L14. Проте тут три машинні системи повинні працювати з різною робочою шириною. Тому поле S3 правильним чином поділяється на підобласті В6, В7, B8, причому при такому поділі поля враховується, яка з підобластей В6, В7, B8 якою з машинних систем і з якою робочою шириною повинна оброблятися. При цьому площі підобластей вибирають так, щоб для кожної машинної системи були точно визначені чотири колії F6, F7, F8 для обробки відповідних підобластей В6, В7, B8. Відмінність у ширині колій відповідно обумовлює відмінність у ширині підобластей. Поділ поля S3 на різні підобласті В6, В7, B8 можна, наприклад, здійснювати за допомогою першої машинної системи, яка також реєструє базову лінію L14. При цьому їй попередньо повинні бути передані дані про робочу ширину інших машинних систем. Тоді пристрій планування маршрутів першої машинної системи формує, наприклад, за раніше прийнятою базовою лінією L14 відповідні віртуальні базові лінії LV6, LV7, LV8. Ці лінії разом з даними про ширину підобластей передаються на машинні системи, призначені для обробки відповідних підобластей В6, В7, B8. Окремі машинні системи у цьому випадку можуть на основі базових ліній LV6, LV7, LV8 самі визначати наступні колії руху F6, F7, F8 всередині оброблюваних ними підобластей В6, В7, B8 та вибирати оптимальні маршрути з врахуванням власних машинних параметрів. Ці оптимальні маршрути потім передаються на першу машинну систему, яка працює тут як "машинна система-господар" і контролює наявність або відсутність небезпеки зіткнення машинних систем у граничних смугах між підобластями В6, В7, B8. Тобто вона забезпечує такий вибір маршрутів, щоб працююча у підобласті 95896 16 В1 машинна система обробляла останню колію F6, обмежуючу підобласть В2, тільки після того, як на граничній з підобластю В6 першій колії F7 другої підобласті В7 вже зібрано урожай. Зрозуміло, що у показаних на фіг.3-5 прикладах виконання винаходу йдеться про відносно невеличкі поля або їх ділянки, причому ці приклади повинні відображати лише принципову можливість обробки полів. Насправді йдеться про значно більші території з безліччю колій руху, коли для їх обробки використовується група з кількох паралельно працюючих машинних систем. Проте ці приклади дозволяють дуже швидко оцінити переваги, які дає запропонований спосіб координованого планування маршрутів. На фіг.6 ще раз, але більш детально, показано індикаторний пристрій 9, 9' з екраном дисплея 9 D для обслуговування оператором пристрою керування 10, 10'. На екрані 9D можна показувати різні базові лінії, наприклад, базову лінію L86 для визначення колій руху F і базову лінію L16 для смуги розвертання. Крім того, можуть бути показані місцезнаходження Р14 перешкод, наприклад, тюків спресованої соломи, дерев і т.п., власне місцезнаходження машини Р1, а також місцезнаходження Р2 іншої машинної системи, яка, наприклад, працює на паралельній колії. При цьому йдеться про "загальне показання", яке передається операторам всіх машинних систем, що беруть участь у роботі, так що вони отримують всі дані про власну та інші машинні системи. Зокрема, можуть бути показані різні характеристики колій руху, область яких вже оброблена або ще обробляється. Окрім колій F, як тут показано, можуть бути показані також повні маршрути, включаючи їх ділянки у смугах розворотів. Тобто показуються не тільки колії руху, а також власне місцезнаходження та місцезнаходження інших машинних систем, але й яка з колій відповідних машинних систем відпрацьовується і яким чином машинні системи змінюють свої колії у смугах розворотів. За допомогою клавіатури 9T оператор машинної системи, окрім всього іншого, вибирає також спосіб подання інформації і, наприклад, перемикається з автоматичного на ручний режим керування. При ручному режимі керування оператору на екрані дисплея 9D показується віртуальна напрямна лінія і символ місцезнаходження обслуговуваної ним машинної системи 1, 2, так що відхилення символу від віртуальної напрямної лінії вказує на відхилення машинної системи від відпрацьовуваного маршруту. Така допомога у водінні дозволяє оператору відносно точно вести машину за бажаним маршрутом у ручному режимі. Як вже згадувалося раніше, у планування маршрутів можуть бути закладені певні зони безпеки для різних машинних систем. Приклад цього поданий на Фіг.7, де показано поле S4, яке на нижньому краї цієї фігури обмежене проїжджою смугою VB, наприклад, шосе. Це шосе становить підвищену небезпеку через проїжджаючі мимо машини, тобто у цій смузі слід особливо звертати увагу на те, щоб при розворотах машинної системи жодна її частина не виступала на проїжджу смугу VB. За допомогою записаної на початку робочого процесу 17 базової лінії L18, яка проходить вздовж проїжджої смуги VB, для кожної машинної системи визначається зона безпеки SZ, яка залежить головним чином від певних робочих параметрів машинної системи, наприклад, від радіуса її повороту та робочої ширини. Зона безпеки SZ визначається у цьому випадку для кожної машинної системи. У цій зоні можна, наприклад, обмежувати автоматичне керування відповідною машинною системою або навіть зовсім його відключати. Інша зона безпеки SZ' проходить на Фіг.7 по верхньому краю поля S4. Тут це поле межує з лісистою смугою W, яка обумовлює ненадійність приймання сигналів супутника для позиціювання. Тому тут за допомогою базової лінії L17, яка проходить вздовж верхнього краю поля, визначається інша зона безпеки SZ' для відповідних машинних систем та призначається їм. Як приклад на фіг.8 і 9 показано, яким чином за допомогою базових ліній можна встановлювати растр для вільних колій G1, G2, зокрема, для колій обприскування, які потім можуть бути використані для керування поворотами у вільних коліях або на частковій їх ширині. В обох варіантах різні колії руху F та вільні колії G1, G2 встановлюються, наприклад, для посіву на відповідному полі S5, а також для наступного обприскування та внесення добрив. При цьому спочатку визначають базову лінію L19, яка відповідає повному контуру поля S5. Потім для посіву розраховують колії F, паралельні правому краю поля, причому ці колії мають розмір, що відповідає робочій ширині сівалки. Згідно з наведеним на фіг.8 варіантом виконання винаходу, визначають зміщену відносно лівого випуклого краю поля базову лінію LG, яка служить для формування вільних колій (колій для обприскування) G1 для наступного обприскування поля. Розмір колій G1 для обприскування вибирають відповідно до робочої ширини польового обприскувача. Колії G1 для обприскування у різних місцях перетинають колії F для сівалки. Тому машинна система може враховувати заплановані вже при посівних роботах колії G1 для обприскування і автоматично стежити за тим, щоб у зоні колій G1 не було посівів. На Фіг.9 подане альтернативне рішення, згідно з яким поле S5 оточене колією G2 для обприскування. Це рішення пропонується в основному для 95896 18 подальшої роботи на невеличких полях S5 польових обприскувачів та розкидачів мінеральних добрив. На закінчення слід ще раз зазначити те, що показані на кресленнях машинні системи та системи керування, а також способи, які вони реалізують, служать лише як приклади виконання винаходу, і фахівець може їх простим способом варіювати, не виходячи за рамки винаходу. Крім того, слід зауважити також на тому, що використання неозначених артиклів не виключає множини відповідних ознак. Перелік умовних позначень на кресленнях: 1 - машинна система/зернозбиральний комбайн 2, 2' - машинна система/зернозбиральний комбайн 3, 3' - пристрій для визначення місцезнаходження 4, 4' - координуючий пристрій 5, 5' - пристрій для планування маршрутів 6, 6' - пристрій для визначення даних планування маршрутів 7, 7' - пристрій зв'язку 8, 8' - пристрій керування рухом 9, 9' - сенсорний дисплей 9D - екран дисплея 9T - клавіатура 10, 10' - пристрій керування 11, 11' - передавальний блок 12, 12' - приймальний блок 13, 13' - запам'ятовуючий пристрій 14, 14' - керуючий процесор P1, P2 - місцезнаходження машинних систем РH - місцезнаходження перешкод V - смуга розвертання VB - проїжджа смуга W - лісиста смуга G1, G2 - вільні колії SZ, SZ' - зони безпеки S1, S2...S5 - оброблювані поля L1, L2...L19 - базові лінії R1, R2...R5 - маршрути B1, B2...B8 - підобласті поля F, F6, F7, F8 - колії руху LV, LG, LV6, LV7, LV8 - похідні базові лінії. 19 95896 20 21 95896 22 23 Комп’ютерна верстка Л. Ціхановська 95896 Підписне 24 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and routing system for agricultural machine systems
Автори англійськоюDieckhans Norbert Dr, Huster Jochen, Brunnert Andreas, Meyer zu Helligen Lars-Peter
Назва патенту російськоюСпособ и система маршрутизации для систем сельскохозяйственных машин
Автори російськоюДикханс Норберт Др, Хустер Йохен, Бруннерт Андреас, Мейер цу Хеллиген Ларс-Петер
МПК / Мітки
МПК: A01B 79/00
Мітки: сільськогосподарських, система, маршрутизації, машин, спосіб, систем
Код посилання
<a href="https://ua.patents.su/12-95896-sposib-i-sistema-marshrutizaci-dlya-sistem-silskogospodarskikh-mashin.html" target="_blank" rel="follow" title="База патентів України">Спосіб і система маршрутизації для систем сільськогосподарських машин</a>
Система маршрутизації для сільськогосподарських машин
Номер патенту: 93982
Опубліковано: 25.03.2011
Автори: Хустер Йохен, Бруннерт Андреас, Дікханс Норберт
МПК: A01B 69/04
Мітки: сільськогосподарських, система, машин, маршрутизації
Формула / Реферат:
1. Система маршрутизації для сільськогосподарських машин, причому для розробки маршрутів руху по території сільськогосподарській машині надана певна ширина обробки, причому система маршрутизації виконана з можливістю динамічної адаптації запланованого маршруту, яка відрізняється тим, що маршрут утворений з безлічі ділянок шляху, а ділянки шляху розробляються за критеріями оптимізації, причому критеріями оптимізації є "найкоротша ділянка...
Система планування маршрутів для сільськогосподарських робочих машин
Номер патенту: 95440
Опубліковано: 10.08.2011
Автори: Бруннерт Андреас, Дікханс Норберт, Меєр цу Хелліген Ларс Петер, Бірманн Інго
МПК: G01C 21/20, A01B 79/00
Мітки: маршрутів, планування, сільськогосподарських, система, машин, робочих
Формула / Реферат:
1. Система планування маршрутів (17) для сільськогосподарських робочих машин (1) з певною робочою шириною (Х) захвату для формування маршрутів (20,29) на певній території (5), де формування маршрутів здійснюється у навігаційному модулі (18), причому навігаційний модуль (18) керуючого обчислювального блока (12) включає щонайменше один автоматичний режим водіння (39-41) для автоматичного керування сільськогосподарською робочою машиною (1) на...
Спосіб зміцнення робочих органів сільськогосподарських машин
Номер патенту: 50620
Опубліковано: 15.10.2002
Автори: Надворний Борис Євдокимович, Аулін Віктор Васильович, Саінсус Олександр Дмитрович, Кулєшков Юрій Володимирович, Кропівний Володимир Миколайович, Черновол Михайло Іванович
МПК: B22F 7/02
Мітки: сільськогосподарських, органів, машин, зміцнення, спосіб, робочих
Формула / Реферат:
1. Спосіб зміцнення робочих органів сільськогосподарських машин попереднім нанесенням порошкового матеріалу на поверхню, що наплавляється, при підборі порошків з різними властивостями зносостійкості відповідно до кривої зносу робочих поверхонь з наступним його розплавлюванням, витримкою й охолодженням, який відрізняється тим, що підбір порошків з різними властивостями зносостійкості здійснюють зміною концентрації зміцнюючої зносостійкої...
Спосіб виготовлення лезових органів сільськогосподарських машин
Номер патенту: 42494
Опубліковано: 15.10.2001
Автори: Копайгора Сергій Васильович, Конопльова Наталья Миколаївна, Анісімов Альбєрт Олександрович
МПК: B21H 7/00
Мітки: сільськогосподарських, машин, лезових, спосіб, органів, виготовлення
Формула / Реферат:
Спосіб виготовлення лезових органів сільськогосподарських машин, що передбачає вирубку заготовки, формоутворювання окрайки леза, загартовування і механічну обробку, який відрізняється тим, що з вирубленої заготовки шляхом плазмової обробки вирізають задану форму лезового органу з одночасним формоутворюванням окрайки леза і загартовуванням, після чого формують отвори впотай.
Спосіб виготовлення робочих органів сільськогосподарських машин
Номер патенту: 4635
Опубліковано: 28.12.1994
Автори: Федорін Олександр Михайлович, Хильчевський Володимир Васильович, Груздева Олена Володимирівна
МПК: B23K 10/00
Мітки: сільськогосподарських, спосіб, виготовлення, робочих, машин, органів
Формула / Реферат:
Способ изготовления рабочих органов сельскохозяйственных мащин, включающий операции воздушно-плазменного вырезания контура изделия из листа металла с одновременным формированием режущей кромки при движении плазмотрона по заданной траектории, отличающийся тем, что операцию вырезания контура изделия и формирования режущей кромки осуществляют при движении плазмотрона с приращением скорости на каждые 50А увеличения рабочего тока,...
Попередній патент: Аналог 17-десметилрапаміцину та спосіб його одержання (варіанти)
Наступний патент: Спосіб викриття спричинених експлуатацією та механічними навантаженнями дефектів у виробах машинобудування (варіанти)
Випадковий патент: Спосіб вторинної реконструкції груді