Система планування маршрутів для сільськогосподарських робочих машин
Номер патенту: 95440
Опубліковано: 10.08.2011
Автори: Бруннерт Андреас, Бірманн Інго, Дікханс Норберт, Меєр цу Хелліген Ларс Петер
Формула / Реферат
1. Система планування маршрутів (17) для сільськогосподарських робочих машин (1) з певною робочою шириною (Х) захвату для формування маршрутів (20,29) на певній території (5), де формування маршрутів здійснюється у навігаційному модулі (18), причому навігаційний модуль (18) керуючого обчислювального блока (12) включає щонайменше один автоматичний режим водіння (39-41) для автоматичного керування сільськогосподарською робочою машиною (1) на маршрутах (20, 29) та щонайменше один режим запису (33) для запису базової лінії (30), яка відрізняється тим, що навігаційний модуль (18) включає один або декілька автоматичних режимів водіння (39-41), при цьому один або декілька автоматичних режимів водіння (39-41) та щонайменше один режим запису (33) можуть бути активовані незалежно один від одного.
2. Система планування маршрутів для сільськогосподарських робочих машин за п. 1, яка відрізняється тим, що в автоматичному режимі водіння (39-41) здійснюється запис певної ділянки шляху певного маршруту (20), і ця ділянка (20) утворює базову лінію (30) для одного або декількох послідовних маршрутів (29), що підлягають відпрацюванню.
3. Система планування маршрутів для сільськогосподарських робочих машин за п. 2, яка відрізняється тим, що визначені базовою лінією (30) певні ділянки шляху (29), що підлягають відпрацюванню, збирають у модулі (49) навігаційної функції як навігаційну функцію (50).
4. Система планування маршрутів для сільськогосподарських робочих машин за одним з попередніх пунктів, яка відрізняється тим, що визначення маршруту (20, 30) здійснюється шляхом вибору початкової (34) і кінцевої (35) точок, що обмежують певну ділянку шляху (20, 30).
5. Система планування маршрутів для сільськогосподарських робочих машин за одним з попередніх пунктів, яка відрізняється тим, що початкову (34) і кінцеву (35) точки вибираються шляхом формування сигналу (31) запуску і сигналу (32) зупинки у керуючому обчислювальному блоці (12).
6. Система планування маршрутів для сільськогосподарських робочих машин за п. 5, яка відрізняється тим, що керуючий обчислювальний блок (12) містить індикаторний блок (14), виконаний у вигляді монітора (36) з сенсорним екраном, а початкова (34) і кінцева (35) точки визначаються шляхом вибору їх на моніторі (36).
7. Система планування маршрутів для сільськогосподарських робочих машин за одним з попередніх пунктів, яка відрізняється тим, що навігаційна функція (50) включає розподіл підлягаючої обробці території (5, 28) на множину маршрутів (20, 29).
8. Система планування маршрутів для сільськогосподарських робочих машин за будь-яким з попередніх пунктів, яка відрізняється тим, що автоматичні режими водіння (39-41) включають проїзд по прямолінійній ділянці, яка обмежена початковою (43) і кінцевою (44) точками, проїзд по контуру ділянки, що обмежена початковою (43) і кінцевою (44) точками, і проїзд по контуру без обмеження початковою (43) і кінцевою (44) точками або комбінацію цих автоматичних режимів водіння (39-41).
9. Система планування маршрутів для сільськогосподарських робочих машин за одним з попередніх пунктів, яка відрізняється тим, що відповідний режим автоматичного водіння (39-41) може вільно вибиратися і можливе перемикання між різними режимами автоматичного водіння (39-41).
10. Система планування маршрутів для сільськогосподарських робочих машин за одним з попередніх пунктів, яка відрізняється тим, що в одному режимі автоматичного водіння (39-41) здійснюється запис певної ділянки шляху (20), і ця ділянка шляху утворює базову лінію для навігаційної функції (50) іншого автоматичного режиму водіння (39-41).
Текст
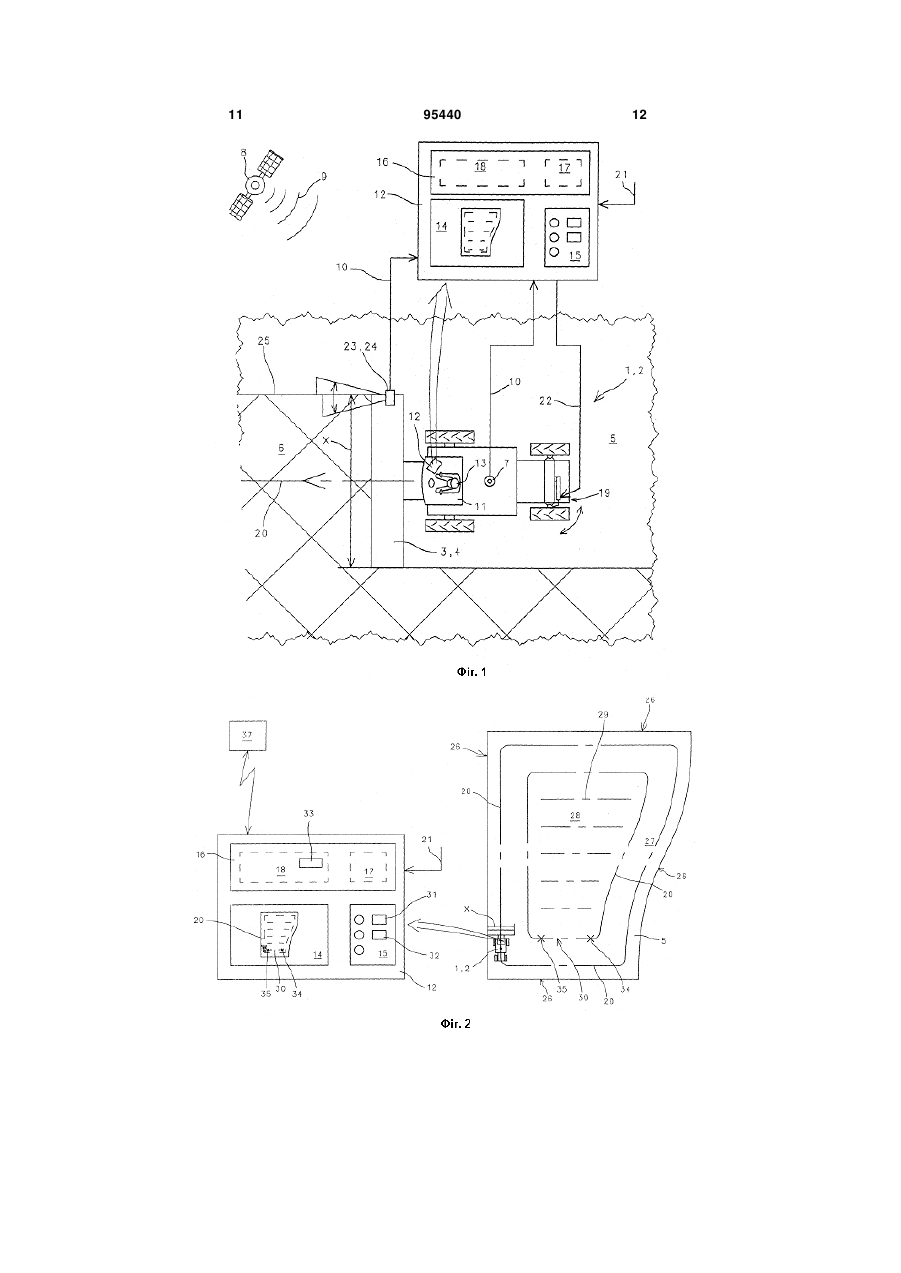
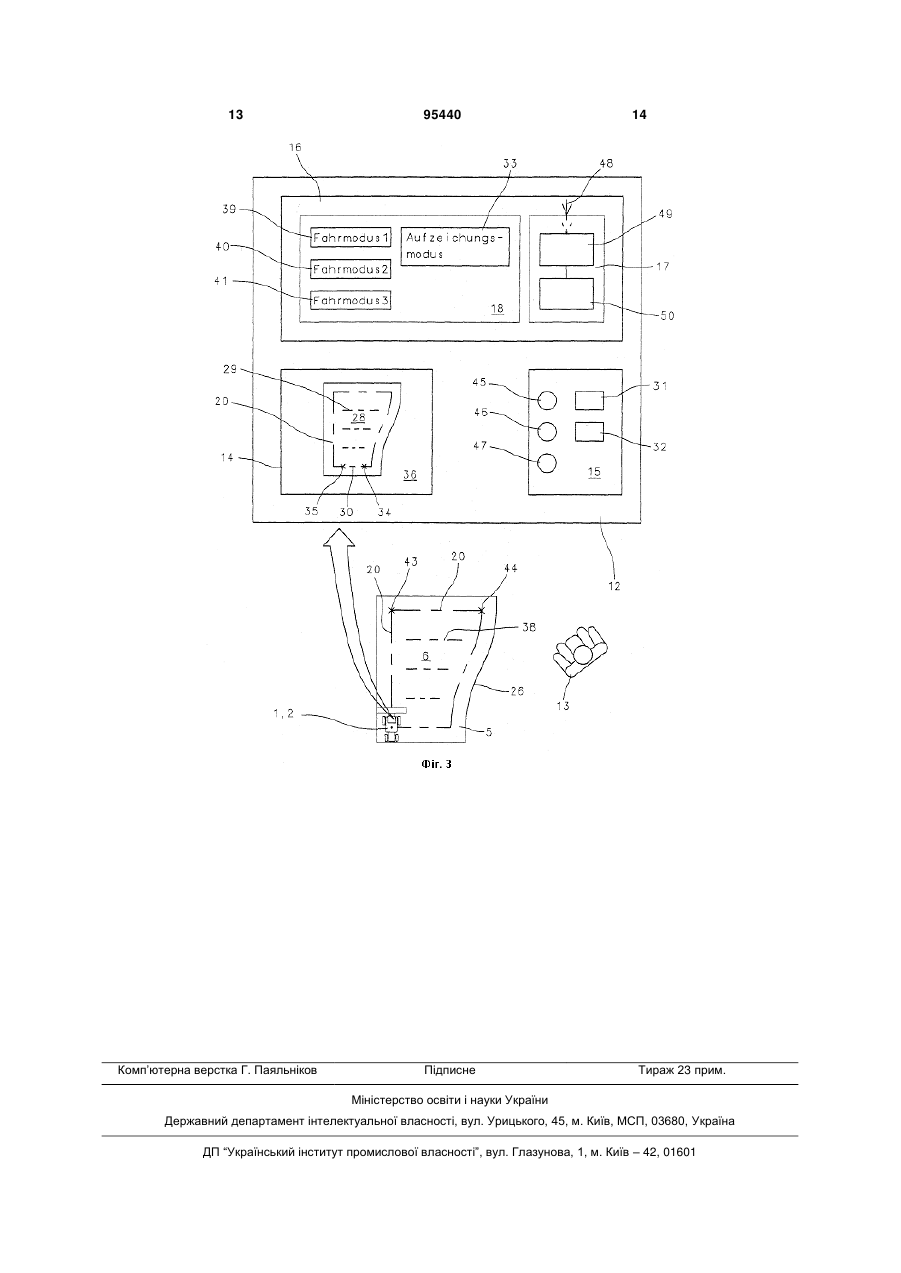
1. Система планування маршрутів (17) для сільськогосподарських робочих машин (1) з певною робочою шириною (Х) захвату для формування маршрутів (20,29) на певній території (5), де формування маршрутів здійснюється у навігаційному модулі (18), причому навігаційний модуль (18) керуючого обчислювального блока (12) включає щонайменше один автоматичний режим водіння (39-41) для автоматичного керування сільськогосподарською робочою машиною (1) на маршрутах (20, 29) та щонайменше один режим запису (33) для запису базової лінії (30), яка відрізняється тим, що навігаційний модуль (18) включає один або декілька автоматичних режимів водіння (39-41), при цьому один або декілька автоматичних режимів водіння (39-41) та щонайменше один режим запису (33) можуть бути активовані незалежно один від одного. 2. Система планування маршрутів для сільськогосподарських робочих машин за п. 1, яка відрізняється тим, що в автоматичному режимі водіння (39-41) здійснюється запис певної ділянки шляху певного маршруту (20), і ця ділянка (20) утворює базову лінію (30) для одного або декількох послідовних маршрутів (29), що підлягають відпрацюванню. 3. Система планування маршрутів для сільськогосподарських робочих машин за п. 2, яка відрізняється тим, що визначені базовою лінією (30) певні ділянки шляху (29), що підлягають відпрацюванню, збирають у модулі (49) навігаційної функції як навігаційну функцію (50). 2 (19) 1 3 95440 4 ному режимі автоматичного водіння (39-41) здійснюється запис певної ділянки шляху (20), і ця ділянка шляху утворює базову лінію для навіга ційної функції (50) іншого автоматичного режиму водіння (39-41). Винахід належить до системи планування маршрутів для сільськогосподарських робочих машин згідно з обмежувальною частиною пункту 1 формули винаходу. З рівня техніки відомі декілька систем планування маршрутів сільськогосподарських робочих машин, які разом з реєстрацією маршрутів машини, що переміщається по оброблюваній території, здійснюють також автоматичне опрацювання запрограмованих маршрутів вказаної машини. Наприклад, в DE 4342171 для процесу обробки ґрунту з використанням даних про місцеположення машини, одержаних за допомогою глобальної супутникової системи навігації, описана реєстрація шляху пересування ґрунтообробної машини по оброблюваній території. Одержані таким чином дані про шлях пересування сільськогосподарської робочої машини перетворюються залежно від виду пристрою обробки даних, розташованого на відповідній сільськогосподарській робочій машині або на центральному обчислювальному блоці, у дані про маршрути, які потім можуть як відображатися в реальному масштабі часу, так і запам'ятовуватися з можливістю повторних викликів. Подібного типу системи мають перш за все той недолік, що машина повинна спочатку обробити ґрунт по певному маршруту, перш ніж з'явиться можливість його виклику в обчислювальному блоці, а також його використання як базовий блок даних. Звичайно використовуваний в даний час спосіб планування маршрутів у поєднанні з так званою автоматичною системою руху по заданій колії відомий з US 6236924 та інших джерел інформації. Як доповнення до програмного забезпечення спочатку оброблювану територію вибирають за характерними базовими точками, а потім вибрану територію розподіляють на певні маршрути за різними критеріями оптимізації, завдяки чому на машину може передаватися заданий маршрут, по якому її проводять по оброблюваній території. Подібного типу системи мають той недолік, що спочатку необхідно визначати характерні базові точки, для чого необхідно або звертатися до раніше встановлених даних або ж здійснювати перший об'їзд території. Використання раніше встановлених даних обмежене їх обсягом, внаслідок чого сам початок руху машини по оброблюваній території вимагає значної підготовчої роботи щодо здійснення планування маршрутів. Тому в основу винаходу поставлена задача усунення вказаних недоліків відомого рівня техніки і запропонована система планування маршрутів, яка могла б швидко і з високою точністю задавати маршрути руху машини по оброблюваній території, що дозволить значно понизити витрати на встановлення цих маршрутів. Згідно з винаходом, поставлена задача вирішується відмітними ознаками пункту 1 формули. Система планування маршрутів містить навігаційний модуль, що включає один або декілька автоматичних режимів водіння і щонайменше один режим запису, причому один або декілька автоматичних режимів водіння і щонайменше один режим запису активуються незалежно один від одного, що забезпечуєможливість експлуатації сільськогосподарської робочої машини в автоматичному режимі водіння і одночасно можливість запису базової лінії для майбутнього відпрацьовуваного автоматичного режиму. Завдяки цьому одночасно відпрацьовується вже існуючий маршрут і встановлюється новий, необхідний в майбутньому маршрут, що значно зменшує витрати на встановлення маршрутів системою їх планування. Згідно з переважною формою виконання винаходу, в автоматичному режимі водіння здійснюється запис певного маршруту, який одночасно утворює базову лінію для одного або декількох послідовно відпрацьовуваних маршрутів. Це дає ту перевагу, що планування маршрутів здійснюється на основі дуже точних даних щодо оброблюваної території, а формування цих точних даних в режимі реального часу виключає потребу у непродуктивних допоміжних поїздках для визначення необхідних базових точок оброблюваної території. Згідно з ще однією переважною формою виконання винаходу, послідовно відпрацьовувані маршрути, визначені базовою лінією, збираються у навігаційному модулі як навігаційна функція. Це забезпечує можливість повного завершення розподілу певних маршрутів по оброблюваній згодом території або ділянці цієї території перед тим, як закінчиться обробка щойно обробленої території. Згідно з наступною переважною формою виконання винаходу, визначення маршруту здійснюється шляхом вибору початкової і кінцевої точок, що обмежують певний маршрут. Таким чином оператор машини може без особливих ускладнень визначити форму нової базової лінії. Найпростішим способом це досягається за рахунок вибору початкової і кінцевої точок шляхом формування сигналу запуску та сигналу зупину у записуючому блоці. Ще більш спрощується експлуатація системи у переважній формі виконання винаходу, згідно з якою керуючий обчислювальний блок містить індикаторний блок, виконаний у вигляді монітора з сенсорним екраном, а початкова і кінцева точки визначаються шляхом вибору їх на вказаному моніторі. Таким чином оператор машини абсолютно вільний у виборі відповідної базової лінії, оскільки на екрані монітора можна задавати будь-яку ділянку маршруту як нову базову лінію. Згідно з переважною формою виконання винаходу, навігаційна функція включає розподіл оброблюваної території на декілька маршрутів, що дозволяє розділити оброблювану територію будьяких розмірів на маршрути. 5 Особливо гнучке використання запропонованої системи планування маршрутів досягається тоді, коли автоматичні режими водіння включають проїзд по прямолінійній ділянці, обмеженій початковою і кінцевою точками, проїзд по ділянці контуру, обмеженій початковою і кінцевою точками та проїзд по контуру без обмеження початковою і кінцевою точками або комбінацію щонайменше цих автоматичних режимів водіння. Гнучкість системи планування маршрутів ще більш підвищується, коли відповідний автоматичний режим водіння може вільно вибиратися і перемикатися між різними автоматичними режимами водіння. Ще одна переважна форма виконання винаходу передбачає здійснення в одному автоматичному режимі водіння запису певного маршруту і утворення цим маршрутом базової лінії для навігаційної функції іншого автоматичного режиму водіння. Особлива перевага такої форми виконання винаходу полягає в тому, що у будь-якому з автоматичних режимів водіння можна формувати базову лінію якої завгодно структури, завдяки чому можна дуже гнучко використовувати спосіб формування базової лінії. Подальші переважні форми виконання винаходу є предметом залежних пунктів формули і пояснюються представленим прикладом здійснення винаходу з посиланнями на креслення, де на фіг. 1 поданий вигляд зверху сільськогосподарської робочої машини з детальним зображенням запропонованого пристрою керування та контролю; на фіг. 2 - схема запропонованої системи планування маршрутів; на фіг. 3 - схема пристрою керування та контролю з програмуючим модулем. На фіг. 1 показана виконана у вигляді зернозбирального комбайна 2 сільськогосподарська робоча машина 1, у передній частині якої встановлена виконана у вигляді жниварського апарата 3 приставка 4 для збирання зростаючих на оброблюваній території 5 насаджень 6. Зернозбиральний комбайн 2 оснащений пристроєм 7 визначення місцеположення на основі відомої глобальної супутникової системи навігації, причому пристрій 7 приймає навігаційні сигнали 9, формовані супутниками 8 так званої глобальної супутникової системи навігації, і за цими сигналами формує сигнали 10 місцеположення комбайна 2. В зоні кабіни 11 комбайнера 13 в діапазоні його дій розташовано щонайменше один керуючий обчислювальний пристрій 12, що містить, згідно з показаною на фіг. 1 у збільшеному масштабі схемою, щонайменше один індикаторний блок 14, вхідний блок 15 і програмуючий модуль 16. У програмуючому модулі 16 розміщена ще детально не описана запропонована система 17 планування маршрутів і навігаційний модуль 18. Крім того, зернозбиральний комбайн 2 оснащений рульовою системою 19, якою можна керувати автоматично, завдяки чому комбайн 2 може автоматично переміщатися по оброблюваній території 5 по заданих маршрутах 20. У найпростішому випадку таке автоматичне керування сільськогосподарською робочою машиною 1 може здійснюватися завдяки тому, що у керуючому обчислювальному блоці 12 закладені відпрацьовувані маршрути 20, причому їх формування прово 95440 6 диться або ззовні або ж у самому блоці 12. При зовнішньому формуванні маршрутів зовнішні сигнали 21 маршрутів передаються шляхом дистанційної передачі даних до керуючого обчислювального блока 12. З урахуванням сигналів 10 місцеположення комбайна 2, які формує пристрій 7 визначення місцеположення на основі глобальної супутникової системи навігації, у керуючому обчислювальному блоці 12 формуються і передаються на рульову систему 19 так звані керуючі сигнали 22, завдяки чому сільськогосподарська робоча машина 1 може автоматично переміщатися на оброблюваній території 5 по одному з певних маршрутів 20. Не виходить за рамки винаходу те, що сигнали місцеположення сільськогосподарської машини 1 на оброблюваній території 5 можуть формуватися також оптоелектронним навігаційним пристроєм 23 або ж лазерним сканером 24, що детектує край 25 насаджень. Згідно з фіг. 2, оброблювана територія 5 може мати будь-який зовнішній контур 26, причому відпрацьовувані сільськогосподарською робочою машиною 1 маршрути 20 повинні вибиратися залежно від її робочої ширини Х так, щоб сусідні маршрути 20 пролягали один від одного приблизно на одній відстані, відповідній робочій ширині Х сільськогосподарської робочої машини 1. Представлені на фіг. 2 штрих-пунктирними лініями крайні маршрути 20 або повинні спочатку визначатися шляхом попереднього об'їзду оброблюваної території 5, або ж, якщо вони раніше вже були відпрацьовані і встановлені, то можуть безпосередньо передаватися до керуючого обчислювального блока 12 зовнішніми сигналами 21. Залежно від якості оброблюваної території 5 і розмірів сільськогосподарської робочої машини 1 може виникнути необхідність у тому, щоб машина 1 відпрацьовувала декілька маршрутів 20, що копіюють зовнішній контур 26 оброблюваної території 5. У цьому випадку можуть автоматично відпрацьовуватися внутрішні маршрути 20. Залежно від зовнішнього контуру 26 оброблюваної території 5, як це випливає з фіг. 2, колії можуть мати найрізноманітнішу конфігурацію та будь-яке розташування. Тепер і повинна вирішуватися задача винаходу. Оптимальне розташування колій на оброблюваній території 5 може плануватися, наприклад, так, щоб залишок 28 території, який залишається необробленим, можна було проїжджати та ефективно обробляти по одному або декількох маршрутах 20, розташованих по краю поля 27 та копіюючих зовнішній контур 26 оброблюваної території 5, з використанням колій 29, що проходять по-іншому. Для формування маршрутів 29 необхідна так звана базова лінія 30, що визначає орієнтацію нових маршрутів 29 на оброблюваній території 5. Згідно з винаходом, базова лінія 30 формується за рахунок того, що в процесі автоматичного руху сільськогосподарської робочої машини 1 по маршруту 20, копіюючому зовнішній контур 26 оброблюваної території 5, оператор 13 машини 1 шляхом натиснення кнопки 31 початку маршруту, а також кнопки 32 зупину може активувати та знову вимикати записуючий блок 33 у навігаційному модулі 18. При активуванні записуючого блока 33 контур маршру 7 ту 20, виконуваного в цей проміжок часу сільськогосподарською робочою машиною 1, реєструється як нова базова лінія 30 і залишається у програмуючому модулі 16. Натиснення кнопки 31 початку маршруту і кнопки 32 зупину приводить до одночасного формування так званих початкової і кінцевої точок 34 і 35, які щонайменше запам'ятовуються, а у переважній формі виконання винаходу також візуалізуються в індикаторному блоці 14. У зв'язку з цим також слід взяти до уваги, що індикаторний блок 14 включає так званий монітор 36 з сенсорним екраном, на якому оператор 13 може безпосередньо вибирати на показаному маршруті 20 початкову 34 і кінцеву 35 точки формованої базової лінії 30. Не виходить за рамки винаходу те, що запам'ятовування формованої базової лінії 30 може бути перенесене до центрального обчислювального пристрою 37. Це забезпечувало б можливість формування нових маршрутів 29, копіюючих контур сформованої базової лінії 30, у центральному обчислювальному пристрої 37 і, отже, виключало б необхідність розміщення потрібних з цією метою обчислювальний засобів на сільськогосподарській робочій машині 1. Це, у свою чергу, дозволило б знизити вартість розміщеного на зернозбиральному комбайні 2 керуючого обчислювального блока 12. На фіг. 3 пояснюється принцип формування маршрутів, для чого представлена необхідна для його здійснення схема програмуючого модуля 16. У нижній частині фіг. 3 показані виконана у вигляді зернозбирального комбайна 2 сільськогосподарська робоча машина 1, а також відпрацьовувані маршрути 20 різної структури. У верхній частині фіг. 3 показаний у збільшеному масштабі керуючий обчислювальний блок 12 з детальною схемою формування даних. Як вже зазначалося, керуючий обчислювальний блок 12 включає індикаторний блок 14, вхідний блок 15 і програмуючий модуль 16. Крім того, програмуючий модуль 16 містить щонайменше модуль системи 17 планування маршрутів і запропонований навігаційний блок 18. Строге розділення на фіг. 3 між навігаційним модулем 18 і модулем системи 17 планування маршрутів зроблене лише з міркувань кращої наочності. Не виходить за рамки винаходу те, що вказані модулі з'єднані в один блок у програмуючому модулі 16. У навігаційному модулі 18 закладені запропоновані автоматичні режими водіння 39-41 і щонайменше один режим запису 33 для реєстрації базової лінії 30. Автоматичні режими водіння 39-41 включають перший автоматичний режим водіння "Проходження прямолінійної ділянки, обмеженої початковою і кінцевою точками" 39, другий автоматичний режим водіння "Проходження ділянки контуру, обмеженої початковою і кінцевою точками" і третій автоматичний режим водіння "Проходження контуру без обмеження початковою і кінцевою точками" 41. Вже саме поняття "автоматичні режими водіння" вказує на їх структуру, а саме автоматичні режими водіння 39 і 40 автоматично ведуть сільськогосподарську машину 1 по маршрутах 20, які задаються початковою 43 і кінцевою 44 точками, причому маршрути 20 утво 95440 8 рені у вигляді прямолінійних або криволінійних ділянок контуру. І навпаки, останній автоматичний режим водіння 41 працює так, щоб сільськогосподарська робоча машина 1 відпрацьовувала спочатку перший, наприклад, зовнішній маршрут 20, копіюючий зовнішній контур 26 оброблюваної території 5, причому він вибирається залежно від того, чи підходить він за своїми характеристиками для автоматичного водіння машини або ж тільки для керування нею оператором 13. У наведеному прикладі виконання винаходу відповідний автоматичний режим водіння 39-41 може бути вибраний за допомогою ключів 45-47 попереднього встановлення. Як вже згадувалося, можна також активувати і зупиняти інтегрований в навігаційний модуль 18 режим запису 33, наприклад, через кнопку 31 початку маршруту і кнопку зупину 32 або шляхом визначення початкової 34 і кінцевої 35 точок базової лінії 30 на моніторі 36 з сенсорним екраном. При цьому використання монітора 36 з сенсорним екраном має ту перевагу, що у цьому випадку вибір базової лінії 30 можна здійснювати до будь-якого моменту часу, коли монітор 36 показує декілька вже відпрацьованих і/або ще відпрацьовуваних маршрутів 20, 29. У переважній формі виконання винаходу різні автоматичні режими водіння 39-41 зв'язані з режимом запису 33 так, щоб, з одного боку, запропонований винаходом запис базової лінії 30 можна було проводити у будьякому наявному автоматичному режимі водіння, а, з другого боку, незалежно від того, активований чи ні один з наявних автоматичних режимів водіння. Таким чином забезпечується можливість запуску режиму запису 33 при одному з автоматичних режимів водіння 39-41 і можливість формування базової лінії 30, яка потім при встановленні маршрутів 20 використовується для одного з інших автоматичних режимів водіння 39-41, активних під час запису базової лінії 30. Наприклад, під час роботи сільськогосподарської робочої машини 1 в автоматичному режимі водіння "Проходження контуру без обмеження початковою і кінцевою точками" 41 запускається режим запису 33 і записується базова лінія 30, яка потім використовується для формування маршрутів 29 для автоматичного режиму водіння "Проходження прямолінійної ділянки, обмеженої початковою і кінцевою точками" 39. При цьому у процесі проходження контуру раніше описаним способом визначаються початкова 34 і кінцева 35 точки для запису базової лінії 30, а режим запису 33 формує як базову лінію 30 прямолінійну ділянку, що знаходиться між цими точками 34 і 35. У наведеному прикладі виконання винаходу з посиланнями на фіг. 3 сільськогосподарську робочу машину 1 ведуть, наприклад, у третьому режимі водіння 41 для відпрацювання маршруту 20, визначаючого зовнішній контур 26 оброблюваної території 5. Не виходить за рамки винаходу те, що сільськогосподарська робоча машина 1 може експлуатуватися також і в режимах водіння 39, 40, або те, що при експлуатації машини один з режимів водіння 39-41 може бути замінений одним з інших режимів 39-41. При досягненні зернозбиральним комбайном 2 прямолінійної ділянки шляху, показаної у нижній частині фіг. 3, оператор 13 ком 9 байна 2 активує кнопку 31 початку маршруту для позначення початкової точки 34 запису. Потім наприкінці вказаної прямолінійної ділянки оператор активує кнопку 32 зупину, в результаті чого запис переривається шляхом позначення кінцевої точки 35. Між початковою 34 і кінцевою 35 точками утворюється базова лінія 30, яка у найпростішому випадку запам'ятовується в керуючому обчислювальному блоці 12, і ця базова лінія виконує функцію початкової інформації для запропонованої системи 17 планування маршрутів. Система 17 планування маршрутів включає так званий модуль 49 навігаційної функції, в якому на основі сформованої базової лінії 30 ще не оброблена територія 28 заповнюється маршрутами 29 і закладається в так звану навігаційну функцію 50. Відпрацювання вже збереженої навігаційної функції 50 може здійснюватися або шляхом цільових викликів або ж таким чином, що оператор 13 спрямовує сільськогосподарську робочу машину 1 паралельно положенню сформованої базової лінії 30 у насадження 6, а програмуючий модуль 16 автоматично розпізнає, що з цієї миті відпрацьовується записана навігаційна функція 50. Не виходить за рамки винаходу те, що у програмуючому модулі 16 може бути закладено декілька навігаційних функцій 50, кожна з яких включає структуровані різним способом маршрути 20, 29. При цьому маршрути 20, 29 можуть відрізнятися як формою, тобто вони можуть бути, наприклад, прямолінійними або криволінійними, так і положенням на оброблюваній території 5, тобто у напрямках північ-південь-схід-захід. Фахівцю зрозуміло, що описана система 17 планування маршрутів може бути перетворена не представленим у даному описі способом або ж використана в інших системах машин з досягненням описаних тут ефектів без виходу за рамки винаходу. Перелік позицій елементів на кресленнях: 1 - сільськогосподарська робоча машина 2 - зернозбиральний комбайн 3 - жниварський апарат 4 - приставка 5 - оброблювана територія 6 - насадження 7 - пристрій для визначення місцеположення на основі глобальної супутникової системи навігації 95440 10 8 - супутник глобальної супутникової системи навігації 9 - сигнал місцеположення машини 10 - сигнал місцеположення машини 11 - кабіна оператора 12 - керуючий обчислювальний блок 13 - оператор 14 - індикаторний блок 15 - вхідний блок 16 - програмуючий модуль 17 - система планування маршрутів 18 - навігаційний модуль 19 - рульова система 20 - маршрут 21 - сигнал маршруту 22 - керуючий сигнал 23 - пристрій для визначення місцеположення машини 24 - лазерний сканер 25 - край насаджень 26 - зовнішній контур оброблюваної території 27 - край поля 28 - необроблена територія 29 - маршрут 30 - базова лінія 31 - кнопка початку маршруту 32 - кнопка зупину 33 - режим запису 34 - початкова точка маршруту 35 - кінцева точка маршруту 36 - монітор з сенсорним екраном 37 - центральний обчислювальний пристрій 38 39 - автоматичний режим водіння 40 - автоматичний режим водіння 41 - автоматичний режим водіння 42 43 - початкова точка 44 - кінцева точка 45 - передшукач 46 - передшукач 47 - передшукач 48 - початкова інформація 49 - модуль навігаційної функції 50 - навігаційна функція Х - робоча ширина машини. 11 95440 12 13 Комп’ютерна верстка Г. Паяльніков 95440 Підписне 14 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRoute planning system for agricultural working machines
Автори англійськоюMeyer zu Helligen Lars Peter, Diekhans Norbert, Brunnert Andreas, Birmann Ingo
Назва патенту російськоюСистема планирования маршрутов для сельскохозяйственных рабочих машин
Автори російськоюМейер цу Хеллиген Ларс Петер, Дикханс Норберт, Бруннерт Андреас, Бирманн Инго
МПК / Мітки
МПК: G01C 21/20, A01B 79/00
Мітки: робочих, планування, маршрутів, система, сільськогосподарських, машин
Код посилання
<a href="https://ua.patents.su/7-95440-sistema-planuvannya-marshrutiv-dlya-silskogospodarskikh-robochikh-mashin.html" target="_blank" rel="follow" title="База патентів України">Система планування маршрутів для сільськогосподарських робочих машин</a>
Система маршрутизації для сільськогосподарських машин
Номер патенту: 93982
Опубліковано: 25.03.2011
Автори: Дікханс Норберт, Бруннерт Андреас, Хустер Йохен
МПК: A01B 69/04
Мітки: машин, маршрутизації, сільськогосподарських, система
Формула / Реферат:
1. Система маршрутизації для сільськогосподарських машин, причому для розробки маршрутів руху по території сільськогосподарській машині надана певна ширина обробки, причому система маршрутизації виконана з можливістю динамічної адаптації запланованого маршруту, яка відрізняється тим, що маршрут утворений з безлічі ділянок шляху, а ділянки шляху розробляються за критеріями оптимізації, причому критеріями оптимізації є "найкоротша ділянка...
Механізм приводу робочих органів сільськогосподарських машин
Номер патенту: 77806
Опубліковано: 15.01.2007
Автори: Павлик Володимир Іванович, Кумпан Віктор Карпович, Пейчев Савва Васильович, Яблуновський Василь Сергійович
МПК: A01B 71/00, A01D 34/00
Мітки: робочих, приводу, сільськогосподарських, машин, органів, механізм
Формула / Реферат:
Механізм приводу робочих органів сільськогосподарських машин, який містить ексцентрик та вал, з’єднані між собою хомутом, які мають в місцях з’єднання лиски, хомут стягує вал і ексцентрик, а внутрішня поверхня хомута у поперечному перерізі виконана у вигляді паза, який відрізняється тим, що радіуси вала, ексцентрика та поверхонь, якими закінчується паз, рівні між собою та є рівними по значенню половині розміру ширини паза, а розміри
Спосіб виготовлення робочих органів сільськогосподарських машин
Номер патенту: 4635
Опубліковано: 28.12.1994
Автори: Федорін Олександр Михайлович, Груздева Олена Володимирівна, Хильчевський Володимир Васильович
МПК: B23K 10/00
Мітки: сільськогосподарських, робочих, органів, виготовлення, спосіб, машин
Формула / Реферат:
Способ изготовления рабочих органов сельскохозяйственных мащин, включающий операции воздушно-плазменного вырезания контура изделия из листа металла с одновременным формированием режущей кромки при движении плазмотрона по заданной траектории, отличающийся тем, что операцию вырезания контура изделия и формирования режущей кромки осуществляют при движении плазмотрона с приращением скорости на каждые 50А увеличения рабочего тока,...
Спосіб зміцнення робочих органів сільськогосподарських машин
Номер патенту: 50620
Опубліковано: 15.10.2002
Автори: Надворний Борис Євдокимович, Кулєшков Юрій Володимирович, Черновол Михайло Іванович, Кропівний Володимир Миколайович, Саінсус Олександр Дмитрович, Аулін Віктор Васильович
МПК: B22F 7/02
Мітки: сільськогосподарських, робочих, машин, зміцнення, органів, спосіб
Формула / Реферат:
1. Спосіб зміцнення робочих органів сільськогосподарських машин попереднім нанесенням порошкового матеріалу на поверхню, що наплавляється, при підборі порошків з різними властивостями зносостійкості відповідно до кривої зносу робочих поверхонь з наступним його розплавлюванням, витримкою й охолодженням, який відрізняється тим, що підбір порошків з різними властивостями зносостійкості здійснюють зміною концентрації зміцнюючої зносостійкої...
Спосіб виготовлення лезових робочих органів сільськогосподарських машин
Номер патенту: 70233
Опубліковано: 15.09.2004
Автори: Чайка Віталій Васильович, Лукашов Олександр Олексійович
МПК: B21H 7/00
Мітки: органів, робочих, сільськогосподарських, лезових, виготовлення, спосіб, машин
Формула / Реферат:
1. Спосіб виготовлення лезових робочих органів сільськогосподарських машин, що включає відрізання заготовок лезового робочого органу, вирізку контуру різальної крайки з одночасним її заточенням методом плазмового різання, гартування, а також формування посадкових отворів, який відрізняється тим, що посадкові отвори формують перед гартуванням, гартування здійснюють всього робочого органу після плазмового різання і формування посадкових отворів...
Попередній патент: Пристрій для відтавання мерзлого ґрунту (варіанти)
Наступний патент: Спосіб визначення якості роботи систем очистки стічних вод
Випадковий патент: Спосіб футерування шківа