Система маршрутизації для сільськогосподарських машин
Номер патенту: 93982
Опубліковано: 25.03.2011
Автори: Бруннерт Андреас, Хустер Йохен, Дікханс Норберт

Формула / Реферат
1. Система маршрутизації для сільськогосподарських машин, причому для розробки маршрутів руху по території сільськогосподарській машині надана певна ширина обробки, причому система маршрутизації виконана з можливістю динамічної адаптації запланованого маршруту, яка відрізняється тим, що маршрут утворений з безлічі ділянок шляху, а ділянки шляху розробляються за критеріями оптимізації, причому критеріями оптимізації є "найкоротша ділянка шляху/час обробки" і/або "незначна частка непродуктивного допоміжного часу", і/або "короткі допоміжні проходи між послідовними підлягають обробці ділянками шляху", і/або «упізнання й обробка вже відомих маршрутів і послідовності процесу обробки", "короткі проходи на краю поля" і/або "мінімізація проходів між сільськогосподарською машиною і перевантажувальним транспортним засобом".
2. Система за п. 1, яка відрізняється тим, що запланований маршрут динамічно адаптується в залежності від фактичного місцеположення машини і дійсного напрямку руху машини.
3. Система за будь-яким з пп. 1 і 2, яка відрізняється тим, що динамічна адаптація маршруту проводиться безперервно.
4. Система за будь-яким з пп. 1 і 2, яка відрізняється тим, що вибір наступної ділянки шляху, що підлягає обробці, визначається за критеріями оптимізації.
5. Система за п. 4, яка відрізняється тим, що виконана з можливістю відмови оператора сільськогосподарської машини від попередньо вибраного маршруту та/або ділянки шляху і вибору будь-якої ділянки шляху.
6. Система за п. 5, яка відрізняється тим, що при відмові оператора сільськогосподарської машини від попередньо вибраного маршруту та/або ділянки шляху система маршрутизації розробляє новий маршрут, що складений з ділянок шляху.
7. Система маршрутизації за п. 1, яка відрізняється тим, що вона виконана з можливістю вироблення стратегії обробки, причому стратегія обробки містить координування паралельних ділянок шляху і дуг повороту, та/або урахування числа та місцеположення інших сільськогосподарських машин, що знаходяться на території, що підлягає обробці, та/або урахування кінематики машини, геометрії території, що підлягає обробці, перешкод на території, що підлягає обробці, та/або урахування характеристик маси, що прибирається, та/або урахування бажань користувача, заздалегідь визначеного процесу обробки.
8. Система за п. 7, яка відрізняється тим, що виконана з можливістю запам'ятовування маршрутів і стратегії обробки для території, що підлягає обробці, і при повторній обробці розпізнавання і автоматичного повернення до цих закладених в пам'ять маршрутів і стратегії обробки.
9. Система за п. 7 або 8, яка відрізняється тим, що в основі маршруту, утвореного ділянками шляху, закладена майстер-лінія, при цьому співвіднесені з майстер-лінією ділянки шляху розробляються віддаленими від майстер-лінії або один від одного на відстань, що приблизно рівна ширині обробки сільськогосподарської машини або кратна її величині.
10. Система за п. 9, яка відрізняється тим, що майстер-лінія може бути прямолінійною або криволінійною, при цьому кожна майстер-лінія задана щонайменше двома віддаленими одна від одної точками (С, D) шляху, а уявне продовження ділянки майстер-лінії, що проходить через ці точки (С, D) шляху, служить направляючою лінією.
11. Система за п. 9, яка відрізняється тим, що майстер-лінія визначається оператором сільськогосподарської машини.
12. Система за п. 11, яка відрізняється тим, що напрямна лінія використовується для автоматичного ведення сільськогосподарської машини.
13. Система за п. 10, яка відрізняється тим, що кількість розроблюваних точок (С, D) шляху криволінійних майстер-ліній зменшується за допомогою обробки за допомогою обчислювальних алгоритмів.
14. Система за п. 9, яка відрізняється тим, що ділянки шляху спочатку повторюють зовнішні контури території, що підлягає обробці, і/або огинають перешкоди, що знаходяться на території, що підлягає обробці, а потім проходять приблизно паралельно одна одній.
15. Система за п. 14, яка відрізняється тим, що довжини ділянок шляху визначаються зовнішнім контуром території, що підлягає обробці, або підлягаючих об'їзду перешкод.
16. Система за п. 15, яка відрізняється тим, що ділянки шляху маршруту продовжені настільки, що сільськогосподарська машина, яка рухається на ділянці шляху, при проході на краю поля на території, що підлягає обробці, виводиться з території так далеко, що поворот сільськогосподарської машини можливий без контакту з необробленою рослинністю.
17. Система за п. 14 або 15, яка відрізняється тим, що кінцевий перехід від однієї ділянки шляху до наступної ділянки шляху визначається за допомогою дуги повороту певного проходу на краю поля.
18. Система за будь-яким з пп. 7, 8, 10-16, яка відрізняється тим, що оператору сільськогосподарської машини, щонайменше в кінці ділянки шляху, вказуються наступні ділянки шляху, при цьому оператор може вибрати наступну ділянку шляху, що підлягає обробці, а система маршрутизації автоматично розробляє дугу для цього проходу на краю поля, причому дуга повороту може бути утворена безліччю ділянок шляху.
19. Система за п. 18, яка відрізняється тим, що оператор може вибирати ділянки шляху за допомогою використання монітора з сенсорним екраном.
20. Система за будь-яким з пп. 7, 8, 10-16, 19, яка відрізняється тим, що ділянки шляху можуть бути замінені оператором сільськогосподарської машини на інші.
Текст
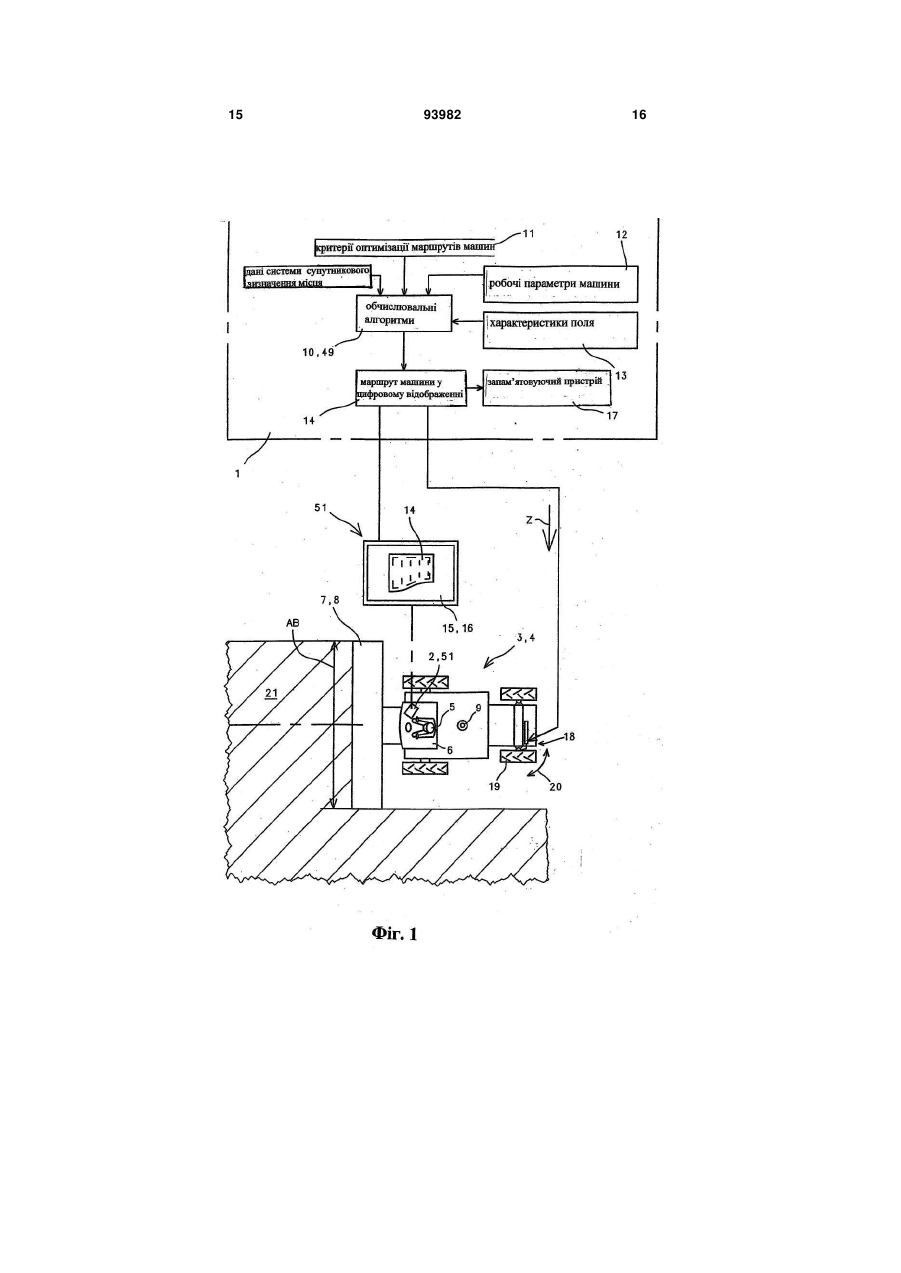
1. Система маршрутизації для сільськогосподарських машин, причому для розробки маршрутів руху по території сільськогосподарській машині надана певна ширина обробки, причому система маршрутизації виконана з можливістю динамічної адаптації запланованого маршруту, яка відрізняється тим, що маршрут утворений з безлічі ділянок шляху, а ділянки шляху розробляються за критеріями оптимізації, причому критеріями оптимізації є "найкоротша ділянка шляху/час обробки" і/або "незначна частка непродуктивного допоміжного часу", і/або "короткі допоміжні проходи між послідовними підлягають обробці ділянками шляху", і/або «упізнання й обробка вже відомих маршрутів і послідовності процесу обробки", "короткі проходи на краю поля" і/або "мінімізація проходів між сільськогосподарською машиною і перевантажувальним транспортним засобом". 2. Система за п.1, яка відрізняється тим, що запланований маршрут динамічно адаптується в залежності від фактичного місцеположення машини і дійсного напрямку руху машини. 3. Система за будь-яким з пп.1 і 2, яка відрізняється тим, що динамічна адаптація маршруту проводиться безперервно. 4. Система за будь-яким з пп.1 і 2, яка відрізняється тим, що вибір наступної ділянки шляху, що підлягає обробці, визначається за критеріями оптимізації. 2 (19) 1 3 93982 4 11. Система за п.9, яка відрізняється тим, що майстер-лінія визначається оператором сільськогосподарської машини. 12. Система за п.11, яка відрізняється тим, що напрямна лінія використовується для автоматичного ведення сільськогосподарської машини. 13. Система за п.10, яка відрізняється тим, що кількість розроблюваних точок (С, D) шляху криволінійних майстер-ліній зменшується за допомогою обробки за допомогою обчислювальних алгоритмів. 14. Система за п.9, яка відрізняється тим, що ділянки шляху спочатку повторюють зовнішні контури території, що підлягає обробці, і/або огинають перешкоди, що знаходяться на території, що підлягає обробці, а потім проходять приблизно паралельно одна одній. 15. Система за п.14, яка відрізняється тим, що довжини ділянок шляху визначаються зовнішнім контуром території, що підлягає обробці, або підлягаючих об'їзду перешкод. 16. Система за п.15, яка відрізняється тим, що ділянки шляху маршруту продовжені настільки, що сільськогосподарська машина, яка рухається на ділянці шляху, при проході на краю поля на території, що підлягає обробці, виводиться з те риторії так далеко, що поворот сільськогосподарської машини можливий без контакту з необробленою рослинністю. 17. Система за п.14 або 15, яка відрізняється тим, що кінцевий перехід від однієї ділянки шляху до наступної ділянки шляху визначається за допомогою дуги повороту певного проходу на краю поля. 18. Система за будь-яким з пп.7, 8, 10-16, яка відрізняється тим, що оператору сільськогосподарської машини, щонайменше в кінці ділянки шляху, вказуються наступні ділянки шляху, при цьому оператор може вибрати наступну ділянку шляху, що підлягає обробці, а система маршрутизації автоматично розробляє дугу для цього проходу на краю поля, причому дуга повороту може бути утворена безліччю ділянок шляху. 19. Система за п.18, яка відрізняється тим, що оператор може вибирати ділянки шляху за допомогою використання монітора з сенсорним екраном. 20. Система за будь-яким з пп.7, 8, 10-16, 19, яка відрізняється тим, що ділянки шляху можуть бути замінені оператором сільськогосподарської машини на інші. Винахід відноситься до системи маршрутизації для сільськогосподарських машин. З ЕР 0 660 660 відомі сільськогосподарські робочі машини, оснащені так званими системами супутникового місцевизначення для реєстрації місцеположення машини на оброблюваній поверхні (так званої системи GPS - Global Positioning System - глобальної системи навігації та позиціонування). При цьому оператор машини визначає її маршрут, а взаємодіюча з реєструвальним пристроєм система супутникового місцевизначення видає дані про місцеположення машини, які потім надходять в реєструвальний пристрій для електронного відтворення прокладеної траєкторії руху машини. Подібного роду системи є першим кроком у напрямку реєстрації маршрутів машин, причому тут йдеться тільки про реєстрацію маршрутів. Проте такого роду системи не забезпечують попереднього планування маршрутів машин. Ідея реєстрації маршрутів машин отримала подальший розвиток у системі вироблення маршрутів за патентним документом ЕР 0821 296 машин залежно від зовнішньої конфігурації оброблюваних корисних сільськогосподарських територій. Суттєва перевага цієї системи полягає у тому, що у ній вперше здійснена можливість визначення маршрутів машин з урахуванням різних критеріїв оптимізації, які у найпростішому випадку автоматично відпрацьовуються сільськогосподарською робочою машиною. Однак такі системи визначають ділянки маршрутів на основі простої геометричної залежності, що зумовлює відпрацювання лише одного разу заданого маршруту, причому відхилення від цього маршруту індукуються або безпосередньо коригуються. Тому завдання винаходу , на вирішення якої спрямований даний винахід, полягає у створенні системи маршрутизації, здатної гнучко реагувати на зміну зовнішніх умов. Згідно з винаходом це завдання вирішується запропонованою системою маршрутизації для сільськогосподарських машин, в якій, для розробки маршрутів руху по території, сільськогосподарській машині присвоєна певна ширина обробки, причому система маршрутизації виконана з можливістю динамічної адаптації запланованого маршруту. За рахунок того, що система маршрутизації допускає динамічну адаптацію запланованого маршруту, забезпечується можливість гнучкої адаптації розробленого маршруту до мінливих зовнішніх умов, таких як об'їзд перешкод, так що оператор сільськогосподарської машини повністю розвантажений від рульових маневрів по поверненню машини на початково розроблений маршрут. Крім того, забезпечується та перевага, що оператор може в будь-який час змінити послідовність процесу обробки на конкретній території, а система маршрутизації автоматично розробляє з 5 урахуванням цієї зміни новий маршрут, по якому далі машина автоматично веде обробку. Оскільки оператор в будь-який час може втручатися в рульове керування машиною, динамічна адаптація маршрутизації в найпростішому випадку досягається за допомогою того, що маршрут динамічно адаптується в залежності від дійсного стану і дійсного напрямку руху машини. Спосіб динамічної адаптації маршрутів працює тим точніше, чим частіше запитується дійсний стан і дійсне напрямок машини. Тому в переважному прикладі здійснення винаходу запропонована безперервно працююча динамічна адаптація маршруту. У найпростішому випадку розроблений маршрут відомим чином утворений з безлічі ділянок шляху, причому кожна з цих ділянок може бути визначена за критеріями оптимізації і, крім того, послідовність обробки ділянок шляху визначається за цим же або за іншими критеріями оптимізації. Для забезпечення, з одного боку, підвищення ефективності процесу обробки і, з іншого боку, мінімальних проходів, що пошкоджують ґрунт проходів по території критеріями оптимізації для обліку системою маршрутизації можуть бути « урахування найкоротшої ділянки шляху» або аналогічне йому «урахування найкоротшого часу обробки». З цими критеріями пов'язаний також наступний критерій оптимізації «зниження непродуктивного допоміжного часу». Під цим критерієм мається на увазі перш за все організація по можливості коротких проходів між послідовними ділянками шляху і мінімізація проходів від сільськогосподарської машини, наприклад, до перевантажувального транспортного засобу. Крім того, сам процес маршрутизації оптимізується за допомогою того, що система маршрутизації розпізнає вже оброблені і закладені в пам'яті маршрути і послідовності процесу обробки і безпосередньо залучає їх при розробці нових маршрутів на відповідній території. Для надання оператору сільськогосподарської машини найбільшої можливості впливу на систему маршрутизації в наступному переважному прикладі здійснення передбачено, що оператор може відмовитися від ділянки шляху, попередньо обраного для обробки системою маршрутизації, і вибрати інший - з попередньо розроблених ділянок шляху, або самостійно визначений ним маршрут. Далі, в переважному прикладі здійснення система маршрутизації виконана таким чином, що при виборі самостійно визначеної ділянки шляху система маршрутизації на основі цього введеного оператором маршруту розробляє новий маршрут, складений з ділянок шляху. Згідно з заявленим винаходом, система маршрутизації виконана також з можливістю вироблення стратегії обробки, причому стратегія обробки містить координування паралельних ділянок шляху і дуг повороту, та/або врахування числа та положень інших сільськогосподарських машин, що знаходяться на території, що підлягає обробці, та/або врахування кінематики машини, геоме 93982 6 трії території, що підлягає обробці, перешкод на території, що підлягає обробці, та/або врахування характеристик маси, що прибирається, та/або врахування бажань користувача, заздалегідь визначеного процесу обробки. За рахунок того, що система маршрутизації має таку структуру, що вона може розробляти стратегії обробки, створені умови для того, щоб система маршрутизації могла координувати маршрути і пов'язані з ними процеси послідовності обробки для кількох сільськогосподарських машин. У найпростішому випадку стратегія обробки утворюється тим, що маршрути різних транспортних засобів, що складаються з паралельних ділянок шляху і дуг повороту, скоординовані між собою таким чином, що спільно працюючі машини завжди використовують приблизно однакові смуги руху, а розвороти завжди виробляються приблизно в одних і тих же областях. Крім того, стратегія обробки може враховувати кінематику сільськогосподарських машин і геометрію площ, що підлягають обробці. Особлива перевага полягає в тому, що, наприклад, при спільній роботі зернозбиральних комбайнів з одним або декількома перевантажувальними транспортними засобами для розвантаження бункерів комбайнів може забезпечуватися позиціювання цих перевантажувальних транспортних засобів таким чином, що комбайни можуть зручним чином позиціонуватися в області перевантажувальних транспортних засобів для перевантаження зерна. Іншими словами, перевантажувальні транспортні засоби повинні бути досить віддалені від території проходу машин з урахуванням кола повороту комбайна і довжини пристрою розвантаження бункера. Далі, стратегія, що розробляється, може бути виконана залежною від бажань користувача. При цьому користувач задає, як правило, послідовності процесу обробки та дотримання певних параметрів, наприклад дотримання величини втрат зерна при збиранні зернових і дотримання часу обробки для закінчення збирання до настання поганої погоди. За рахунок того, що система маршрутизації додатково виконана таким чином, що пізнає маршрути і стратегії обробки, значно знижується необхідний обсяг обчислень для розробки ділянок шляху, що утворюють маршрут. У цьому відношенні особливо ефективна система маршрутизації створюється в тому випадку, коли вона може залучати закладені у пам'яті стратегії руху, які визначають машини, що працюють на даній території, або одночасно, або послідовно, і їх оптимізовані маршрути. Для спрощення процесів обчислень і візуального представлення в системі маршрутизації для розробки маршруту визначена так звана базова лінія або майстер-лінія, при цьому подальші ділянки шляху зображуються віддаленими від цієї майстер-лінії на відстань, приблизно рівну ширині обробки сільськогосподарської машини або кратне її величині. З таким же ефектом в наступному переважному прикладі здійснення майстер-лінія, яка виконана прямолінійною або криволінійною, визначається, щонайменше, двома віддаленими 7 одна від одної точками шляху, причому уявне продовження майстер-лінії, що проходить через ці віддалені одна від одної точки шляху, служить направляючою лінією , по якій проводиться напрямок сільськогосподарської машини на території, що підлягає обробці. У найпростішому випадку оператор сільськогосподарської машини визначає майстер-лінію за допомогою введення координат. Для зменшення необхідного об'єму пам'яті і прискорення процесу обчислень для розробки маршруту в системі маршрутизації закладені алгоритми, які з урахуванням необхідної точності зменшують кількість точок шляху, необхідних для побудови криволінійної основної лінії. Для досягнення наочно структурованих маршрутів і зниженої кількості рульових маневрів на сільськогосподарській машині вигідно, коли система маршрутизації за винаходом спочатку визначає ділянки шляху, які повторюють зовнішній контур території, що підлягає обробці, або перешкод, що підлягають об'їзду, а потім розробляє (генерує) ділянки шляху, що проходять приблизно паралельно одна одній. При цьому довжини ділянок шляху розроблюваного маршруту по суті визначаються зовнішнім контуром території, що підлягає обробці, або перешкод, що підлягають об'їзду. Для того, щоб сільськогосподарські машини на кінці ділянок шляху могли виконувати розворот для проходу до наступної ділянки шляху обробки і при цьому не пошкоджували ще необроблені території або рослинність, що знаходиться на них, в наступному переважному прикладі здійснення винаходу запропоновано можливе продовження ділянок шляху. Це, зокрема, забезпечує ту перевагу, що сільськогосподарська машина далеко виходить за межі рослинності, перш ніж підходить до початку процесу повороту. Для того, щоб оператор сільськогосподарської машини міг безпосередньо впливати на послідовність обробки ділянок шляху, розроблених системою маршрутизації, утворений з ділянок шляху маршрут візуально вказується оператору, щонайменше, в кінцевих зонах ділянок шляху. У тому випадку, коли оператор вибирає для обробки ділянку шляху, яка відмінна від наступної запропонованої системою маршрутизації ділянки шляху, система 20 маршрутизації автоматично розробляє необхідну криву повороту для досягнення вибраної ділянки шляху. Особлива перевага рішення полягає в тому, що водій значною мірою звільняється від частини складних рульових маневрів в області повороту. У найпростішому випадку вибір наступної ділянки шляху для обробки здійснюється за допомогою так званого монітора з сенсорним екраном (Touch-Screen Monitor). Оператор сільськогосподарської машини має також можливість зміщувати розроблені системою маршрутизації ділянки шляху відомим чином за допомогою засобів введення, наприклад, для того, щоб компенсувати неточності даних GPS. Далі з посиланнями на креслення, що надаються, 93982 8 будуть детально описані приклади здійснення винаходу. Фіг.1 схематично зображує систему маршрутизації відповідно до винаходу, Фіг.2 зображує територію, що підлягає обробці, розбиту на ділянки шляху, Фіг.3 зображує систему маршрутизації в одному прикладі виконання, Фіг.4 зображує систему маршрутизації в іншому прикладі виконання, Фіг.5 зображує систему маршрутизації у вигляді блок-схеми. На Фіг.1 схематично зображена систему 1 маршрутизації, яка вже відома з ЕР 0821296, і закладена в обчислювально-індикаторному пристрої 2 сільськогосподарської машини 4, яка представлена як зернозбиральний комбайн 3. Обчислювально-індикаторний пристрій 2 розташований в кабіні 6 оператора 5 комбайна 3 в зоні бачення та доступності для управління. Спереду зернозбиральний комбайн оснащений навісним апаратом 8, наприклад, у вигляді жнивного апарату 7, ширина якого визначає ширину АВ обробки комбайна 3. Крім того, сільськогосподарська машина 4 забезпечена так званої GPS-антеною 9 для прийому координат положення від системи GPS. Блок-схема системи маршрутизації показана на Фіг.1 у збільшеному вигляді винесеною і обмеженої штрихпунктирними лініями. Система 1 маршрутизації містить один або декілька обчислювальних алгоритмів 10, які певним чином розробляють координати положення сільськогосподарської машини 4 з сигналів GPS, одержуваних від GPS-антени 9. З урахуванням критеріїв 11 оптимізації, як це буде детально пояснено далі, а також характерних параметрів 12 машини і характерних параметрів 13 поля, обчислювальні алгоритми 10 розробляють маршрути 14, які виражені в цифровій формі та які в найпростішому випадку показуються оператору 5 за допомогою індикаторного блоку 16, виконаного у вигляді монітора 15 і розташованого в кабіні 6. При цьому система 1 маршрутизації цього типу може бути виконана таким чином, що розроблені маршрути 14 можуть зберігатися в запам'ятовуючому блоці 17 і повторно викликатися з нього. Відомо також, що з розроблених маршрутів 14 можуть бути виведені керуючі сигнали Z, які в залежності від конфігурації маршрутів 14 впливають на систему 18 рульового управління сільськогосподарської машини 4 таким чином, що керовані колеса 19 здійснюють поворот 20 для проходження по маршруту 14. Фіг.2 зображує територію 21, а саме, поле 22 , що підлягає прибиранню зернових, за яким має пройти сільськогосподарська машина 4, виконана у вигляді комбайна 3. Вибране як приклад поле 22 має периметр, що складається з прямолінійних і криволінійних зовнішніх контурів 23. Географічні дані цих зовнішніх контурів 23 можуть бути визначені самим комбайном 3 таким чином, що оператор 5 направляє комбайн 3 вдовж цих зовнішніх контурів 23, при цьому система 1 маршрутизації розробляє перший маршрут 24 з використанням сигналів GPS. У найпростішому ви 9 падку система 1 маршрутизації розробляє цей маршрут 24 для положення, яке відповідає приблизно середині ширини АВ обробки навісного апарату 8, причому відтворення зовнішнього контуру 23 території 21, що проїжджається, здійснюється послідовністю множини ділянок 25 шляху. Така система 1 маршрутизації може відомим чином генерувати подальші ділянки 25, 26 шляху з урахуванням представлених на Фіг.1 параметрів, таких, як самі різні критерії 11 оптимізації, а також характерні параметри 12 машини і характерні параметри 13 поля. У найпростішому випадку ці ділянки 25, 26 шляху розташовані по суті паралельно одна одній та або утворюють відносно складний зовнішній контур 23, або є прямолінійними. Для забезпечення повної обробки території 21 відстані між сусідніми ділянками 25, 26 шляху приблизно відповідають ширині АВ обробки навісного апарату 8. Як показано на Фіг.3, на території 21, що підлягає проходу, може бути розташоване одне або декілька перешкод 27, які машина 4 повинна об'їжджати. Крім того, оператор машини може вирішити, наприклад, змінити маршрут 14, розроблений системою 1 маршрутизації, таким чином, щоб проводити обробку території 21 по частинах. При цьому в найпростішому випадку оператор 5 втручається в управління сільськогосподарської машини 4 і виробляє ручне рульове управління, наприклад, з метою розділення території 21 на перший і другий майданчики 28, 29. Найчастіше оператор з найрізноманітніших суб'єктивних критеріїв приймає рішення про те, які напрямки і ділянки обробки дадуть ефективну обробку території 21 в цілому. Такими суб'єктивними критеріями можуть бути, наприклад, поділ території 21, що підлягає обробці, на прості по геометрії майданчики з прямолінійними краями, що вимагають мало рульових маневрів, чи необхідність об'їзду перешкод 27 або недозрілої, дуже вологої або полеглої культури, що прибирається. Оскільки в цих випадках оператор 5 задає нову ділянку 30 шляху, система 1 маршрутизації не може продовжувати використовувати в якості опорного вже розроблений маршрут 14. Уданому випадку згідно винаходу передбачено, що система маршрутизації 1 розпізнає відхилення дійсного стану 31 машини від заданого положення 32, що визначається заданим маршрутом 14, а також зміна дійсного напрямку 33 машини від заданого напрямку 34, і на основі цього нового положення 31, 33 машини розробляє новий маршрут 14, при цьому новий маршрут 14 враховує вже оброблену терторію 21. Аналогічно оператор 5 може втручатися в рульове управління при об'їзді перешкод 27. Уданому прикладі виконання з метою спрощення на Фіг.3 представлений випадок, коли оператор 5 для об'їзду перешкоди 27 виробляє повністю ручне рульове управління поворотами на ділянці 30 об'їзду до повернення на попередньо розроблений маршрут 14. Винаходом передбачено, що оператор вводить в систему 1 маршрутизації окружний об’їзд, а система на основі цієї зміни 93982 10 положення сільськогосподарської машини 4 автоматично розробляє новий маршрут 14. Оскільки система 1 маршрутизації працює на базі GPS, можливий також варіант, коли вона на основі інформації про стаціонарні перешкоди на оброблюваній території 21, таких як дерева, може автоматично враховувати їх положення при розробці маршруту 14, 14. Завдяки забезпеченню такої безпосередньої реакції системи 1 маршрутизації на втручання оператора 5 в рульове керування сільськогосподарською машини 4 створюється динамічна система 1 маршрутизації, яка може дуже гнучко реагувати на зміни маршруту 14. Подальше підвищення гнучкості і висока точність такої системи 1 маршрутизації досягаються в тому випадку, коли система 1 маршрутизації безперервно визначає фактичне місцезнаходження 31 і фактичний напрямок 33 машини і залежно від цих даних виробляє безперервну адаптацію маршруту 14, 14 сільськогосподарської машини 4. Згідно з описаними вище прикладами, здійснення розроблені системою 1 маршрутизації маршрути 14, 14 складаються з множини ділянок 25, 26 шляху, при цьому визначення цих ділянок 25, 26 шляху по довжині, напрямку та послідовності процесу обробки може залежати від самих різних критеріїв 11 оптимізації. Як правило, збирання врожаю з поля 22 зернової культури проводиться, як це показано на Фіг.4, таким чином, що один або кілька зернозбиральних комбайнів 3 прибирають культуру і передають прибрану масу на одне або декілька перевантажувальних транспортних засобів 35, що знаходяться у певних положеннях на території 21, що підлягає прибиранню. При цьому особливо істотно, щоб машини 4, 35 проходили територією 21 по коротким робочим ділянках шляху з найменшим пошкодженням ґрунту. Крім того, ефективний процес збирання врожаю значною мірою визначається незначними витратами часу на прибирання і пов'язаної з цим незначними витратами часу на допоміжні непродуктивні проходи. Тому система маршрутизації 1 у своїх закладених обчислювальних алгоритмах 10 враховує вирішальні критерії 11 оптимізації «мінімальна ділянка шляху», «мінімальний час обробки» та/або «незначна частка витрати непродуктивного допоміжного часу». У найпростішому випадку в обчислювальних алгоритмах 10 визначено математичні залежності між заснованими на GPS даними місцезнаходження сільськогосподарських машин 4, перевантажувальних машин 35 і зовнішніми контурами 23 території 21,що підлягає обробці, залежно від вибраних або попередньо заданих характерних параметрів 12 машин або характерних параметрів 13 поля, як це буде докладніше пояснено далі. Наступним критерієм 11 оптимізації, безпосередньо пов'язаним з перерахованими вище критеріями, є критерій «короткі допоміжні проходи між послідовними ділянками 25, 26 шляху, що підлягають обробці». Як показано на Фіг.4, якби послідовність процесу обробки виконувалась шляхом обробки окремих ділянок 26 шляху, що проходять з двох сторін зовні всередину, комбайн 3 повинен був би робити значні допоміжні проходи. Тут оптимізація мо 11 же здійснюватися, виходячи з того, що обчислювальні алгоритми 10 розробляють оптимізовану послідовність процесу обробки. Вона може полягати, наприклад, в тому, що територія 21, утворена ділянками 26 шляху, що поперечно проходять, спочатку поділяється на перший і другий майданчики 28, 29, а потім для кожного майданчика 28, 29 розробляються окремі маршрути 14. Наступним критерієм 11 оптимізації може бути розпізнавання й обробка вже відомих маршрутів 14 і протікання процесу обробки. З одного боку, по території 21, що підлягає обробці в ході обробки ґрунту і збирання врожаю проходять самі різні сільськогосподарські машини 4. З іншого боку, дана територія 21 щорічно періодично піддається обробці. В обох випадках вигідно, щоб процес розробки маршрутів 14 міг бути значно скорочений. Це може досягатися шляхом того, що система 1 маршрутизації виконана таким чином, що вона може розпізнавати територію 21 і вже розроблені для неї раніше послідовність процесу обробки і маршрути 14 та повертатися до них. Короткі ділянки проходів і незначна частка витрати непродуктивного допоміжного часу досягаються також за рахунок того, що наступними критеріями 11 оптимізації є «мінімізація проходів між сільськогосподарською машиною 4 і перевантажувальним транспортним засобом 35», а також «короткі проходи 36 на краю поля». Внаслідок того, що процеси обробки поля, як правило, здійснюються шляхом взаємодії кількох сільськогосподарських машин 4, особливо ефективна система 1 маршрутизації створюється в тому випадку, коли вона за допомогою закладених в ній обчислювальних алгоритмів 10 здатна розробляти стратегії обробки. У найпростішому випадку стратегія обробки обмежується тим, що система маршрутизації розробляє ділянки 25, 26 шляху і так звані дуги 37 повороту і встановлює певну послідовність процесу обробки ділянок 25, 26 шляху і дуг 37 повороту. У прикладі виконання за Фіг.4 при використанні двох комбайнів З стратегія обробки може полягати, наприклад, в тому, що система маршрутизації 1 згідно попереднім прикладів здійснення спочатку підрозділяє територію 21, що підлягає обробці, на перший і другий майданчики 28, 29, а потім кожному комбайну 3 призначає для обробки майданчик 28, 29. У цьому випадку стратегія обробки по суті полягає в тому, щоб врахувати число і місцезнаходження самих різних сільськогосподарських машин 4, що знаходяться в експлуатації на даній території 21. Особливо при проведенні так званого процесу перевантаження, коли комбайн передає на перевантажувальний транспортний засіб 35 прибрану масу, що накопичена під час робочих проходів прибирання, особливо важливо, щоб комбайн 3 міг займати потрібне положення відносно перевантажувального транспортного засобу 35 і щоб при цьому не створювалися взаємні перешкоди з іншими комбайнами, яки також загружають перевантажувальний транспортний засіб 35. У найпростішому випадку це може надійно забезпечуватися за рахунок того, що стратегія обробки, що розробляється системою 1 маршрутизації, вра 93982 12 ховує кінематику машин в залежності від типу машин, геометрію території 21, особливо при так званих проходах 36 на краю поля (розворотах на краю поля) і, у необхідних випадках, положення перешкод 27 на оброблюваній території 21. При цьому кінематика машин утворює характерні параметри 12 машин, якими можуть бути, наприклад, можливі радіуси повороту і кути повороту рульового колеса комбайна З, геометрія його пристрою 38 розвантаження бункера і габарити перевантажувального транспортного засобу 35. Облік геометрії підлягає обробці території 21 та має особливо важливе значення при процесі перевантаження, схематично зображено на Фіг.4, оскільки зручне досягнення положення перевантаження істотно скорочує процес перевантаження і, відповідно, веде до скорочення потрібних витрат допоміжного часу. Крім того, стратегія обробки може враховувати показники маси, що прибирається, такі, як полеглі зернові, порожні ділянки, занадто високу вологість культури, причому така інформація в основному передається в систему 1 маршрутизації оператором 5 сільськогосподарської машини 4. Як показники маси, що прибирається, так і геометрія території 21, що підлягає обробці, утворюють в системі 1 маршрутизації так звані характерні параметри 13 поля. Далі, стратегія обробки, що розробляється системою 1 маршрутизації, може враховувати побажання користувача в тому відношенні, що користувач попередньо задає, наприклад, допустимі верхні межі для втрат прибраній маси або час обробки. Часто буває, що користувач на основі минулого досвіду віддає перевагу певній послідовності процесу обробки, наприклад, з урахуванням висихання маси, що прибирається, яке під впливом різних зовнішніх умов може бути дуже різним у межах території 21, що підлягає обробці. Крім того, стратегія обробки може попередньо задавати повну послідовність робіт в тому відношенні, що в той час, як комбайн 3 ще обробляє територію 21, вже починаються наступні процеси, такі як, наприклад, пресування викладеної на полі соломи або переорювання стерні. Спосіб розробки маршрутів 14, схематично показаний на Фіг.1, може здійснюватися відповідно до блок-схеми по Фіг.5. У найпростішому випадку спосіб здійснюється таким чином, що оператор 5 сільськогосподарської машини 4 на першому кроці 39 обходить по периметру територію 21, що підлягає обробці, причому географічні дані зовнішнього контуру 23 території 21 визначаються за допомогою системи GPS. У рамках винаходу можливий варіант, коли географічні дані вже відомої території 21 можуть передаватися безпосередньо з банку 40 даних в систему 1 маршрутизації. У системі 1 маршрутизації за допомогою використання вже описаних обчислювальних алгоритмів 10 і з урахуванням характерних параметрів 12 машини і характерних параметрів 13 поля на наступному кроці 41 обробки обчислюються ділянки 25, 26. На наступному кроці 42 обробки в системі 1 маршрутизації проводиться оптимізація розроблених маршрутів 14, 14' із залученням різних вже описаних раніше 13 критеріїв 11 оптимізації, причому в найпростішому випадку спочатку автоматично обробляється розроблений маршрут 14. Як вже було описано, цей крок 43 способу здійснюється таким чином, що система 1 маршрутизації розробляє керуючі сигнали Z, які безпосередньо втручаються в систему 18 рульового управління сільськогосподарської машини 4 так, що ця система рульового управління автоматично ведеться уздовж розробленого маршруту 14 на території 21, що підлягає обробці. Якщо оператор 5 сільськогосподарської машини 4 втручається в процес рульового управління на наступному кроці 44 обробки або, якщо він відмовляється від розробленого маршруту 14, система 1 маршрутизації розробляє новий маршрут 14', причому в цьому випадку повторюються попередні кроки 41-43 обробки. Цей процес завжди повторюється в тих випадках, коли або відкидається розроблений маршрут 14, або оператор безпосередньо втручається в обробку маршруту 14 за допомогою впливу на систему 18 рульового управління сільськогосподарською машиною 4. Таким чином, система 1 маршрутизації за винаходом в кінцевому підсумку завжди розробляє маршрут 14, 14', який утворює оптимум 45 між вимогами оператора 5 та обліком самих різних критеріїв 11 оптимізації. Для того, щоб розроблені маршрути 14, 14' могли бути далі оброблені електронними засобами і представлені графічно для огляду, ці маршрути 14, 14' описуються в системі 1 маршрутизації за допомогою представлених зліва на Фіг.3 так званих базових або майстер-ліній 46, при цьому ділянки 25, 26 колії, що примикають до майстер-ліній 46, відстоять одна від одної на відстані, рівній ширині АВ обробки сільськогосподарської машини 4 або кратній її величині. Таким чином, територія 21, що підлягає обробці, певна своїми зовнішніми контурами 23, описується кількома майстер-лініями 46, що відстають одна від одної, при цьому майстер-лінії 46 в залежності від виду зовнішніх контурів 23 можуть бути також прямолінійними або криволінійними. Для того, щоб майстер-лінії 46 могли досить точно моделювати розроблений маршрут 14, 14' і служити в якості задаючих величин для автоматичного впливу на систему 18 рульового управління сільськогосподарської машини 4, майстер-лінії 46 завжди визначаються двома точками С, D шляху, віддаленими одна від одної, причому уявне продовження 47 майстер-лінії 46, що проходить через ці точки С, D шляху, служить направляючою лінією 48. 93982 14 Оскільки точна побудова криволінійних ділянок 25, 26 шляху вимагає значного числа точок С, D шляху, що пов'язано з великим обсягом обчислень, в наступному прикладі здійснення винаходу передбачено, що для системи 1 маршрутизації призначені додаткові обчислювальні алгоритми 49, які залежно від меж точності, які попередньо визначені, або таких, що попередньо визначають, виконують зменшення точок С, D шляху криволінійних ділянок 25, 26 шляху, так що розроблений в кінцевому рахунку маршрут 14, 14' досить точно утворює територію 21, яка визначається своїми зовнішніми контурами 21. Для того щоб сільськогосподарська машина 4 під час проходу 36 на краю поля не наїжджала на необроблену рослинність 50, ділянки 25, 26 шляху, що утворюють маршрут 14, 14', як це показано на Фіг.4, продовжені в області проходу 36 на краю поля, так що сільськогосподарська машина 4 до виконанням дуги 37 повороту спочатку досить далеко виїжджає з зони рослинності 50. Для того щоб оператор 5 сільськогосподарської машини 4 міг здійснити безпосередній вплив на послідовність процесу обробки ділянок 25, 26 шляху, що утворюють маршрут 14, 14', вони візуально показуються оператору 5 за допомогою вже описаного індикаторного пристрою 2. При цьому окремі ділянки 25, 26 шляху можуть показуватися або постійно, або тільки у вигляді певних ділянок, - наприклад, в області проходу 36 на краю поля. Для того, щоб оператор 5 просто міг змінювати послідовність процесу обробки ділянок 25, 26 шляху, що утворюють маршрут 14, 14', індикаторний пристрій 2 виконано у вигляді так званого монітора 51 із сенсорним екраном, так що наступні ділянки 25, 26 шляху можуть бути обрані безпосередньо на моніторі. Це створює особливу перевагу в області проходу 36 на краю поля, так як оператор 5 може просто впливати на поділ території 21, що підлягає обробці на майданчики 28, 29. Крім того, для індикаторного пристрою 2 може бути відомим чином передбачено засіб, що створює можливість для оператора 5 зміщувати розроблений маршрут 14, 14' в цілому або окремі ділянки 25, 26 шляху цього маршруту 14, 14' на території 21, що підлягає обробці, для усунення можливих неточностей при розробці маршрутів. Для фахівця в даній області зрозуміло, що при здійсненні винаходу можливі різні зміни і модифікації описаної системи 1 маршрутизації або її інтегрування в системи інших машин в межах обсягу захисту винаходу. 15 93982 16 17 93982 18 19 93982 20 21 Комп’ютерна верстка Н. Лиcенко 93982 Підписне 22 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRoute planning system for agricultural machines
Автори англійськоюDiekhans Norbert, Huster Jochen, Brunnert Andreas
Назва патенту російськоюСистема маршрутизации для сельскохозяйственных машин
Автори російськоюДикханс Норберт, Хустер Йохен, Бруннерт Андреас
МПК / Мітки
МПК: A01B 69/04
Мітки: система, сільськогосподарських, маршрутизації, машин
Код посилання
<a href="https://ua.patents.su/11-93982-sistema-marshrutizaci-dlya-silskogospodarskikh-mashin.html" target="_blank" rel="follow" title="База патентів України">Система маршрутизації для сільськогосподарських машин</a>
Зчіпний пристрій для агрегатування сільськогосподарських машин
Номер патенту: 53563
Опубліковано: 11.10.2010
Автори: Ткачук Олександр Дмитрович, Єсьман Микола Іванович, Ніцко Валерій Іванович
МПК: A01B 63/00
Мітки: машин, агрегатування, пристрій, зчіпний, сільськогосподарських
Формула / Реферат:
1. Зчіпний пристрій для агрегатування сільськогосподарських машин, що включає центральне та два нижні вушка, що жорстко закріплені на рамі машини з відстанню між ними, близькою до розмірів зчіпного пристрою трактора, тягову сницю з петлею, розкіс, під'єднувальний вал та опорні колеса, який відрізняється тим, що сниця жорстко прикріплена до під'єднувального вала, який вільно обертається в нижніх вушках та має опорні поверхні для під'єднання...
Система випарного охолодження електричних машин
Номер патенту: 12722
Опубліковано: 15.02.2006
Автори: Красніков Геннадій Васильович, Бойко Іван Григорович, Ткачук Микола Миколайович, Омельченко Олександр Миколайович, Ткачук Олександр Миколайович
МПК: H02K 9/19
Мітки: охолодження, електричних, випарного, машин, система
Формула / Реферат:
1. Система випарного охолодження електричних машин рідиною, що циркулює по каналах, гідравлічно зв'язаних з насосом і конденсатором з охолоджувачем, яка відрізняється тим, що канали виконані у вигляді трубчастого змійовика з зовнішньої сторони корпуса електричної машини.2. Система за п. 1, яка відрізняється тим, що в гідравлічному ланцюзі проходження пари рідини між електричною машиною і конденсатором установлена турбінка,...
Спосіб виготовлення лезових органів сільськогосподарських машин
Номер патенту: 42494
Опубліковано: 15.10.2001
Автори: Анісімов Альбєрт Олександрович, Конопльова Наталья Миколаївна, Копайгора Сергій Васильович
МПК: B21H 7/00
Мітки: сільськогосподарських, лезових, спосіб, виготовлення, машин, органів
Формула / Реферат:
Спосіб виготовлення лезових органів сільськогосподарських машин, що передбачає вирубку заготовки, формоутворювання окрайки леза, загартовування і механічну обробку, який відрізняється тим, що з вирубленої заготовки шляхом плазмової обробки вирізають задану форму лезового органу з одночасним формоутворюванням окрайки леза і загартовуванням, після чого формують отвори впотай.
Спосіб виготовлення лезових робочих органів сільськогосподарських машин
Номер патенту: 70233
Опубліковано: 15.09.2004
Автори: Лукашов Олександр Олексійович, Чайка Віталій Васильович
МПК: B21H 7/00
Мітки: робочих, спосіб, машин, лезових, виготовлення, органів, сільськогосподарських
Формула / Реферат:
1. Спосіб виготовлення лезових робочих органів сільськогосподарських машин, що включає відрізання заготовок лезового робочого органу, вирізку контуру різальної крайки з одночасним її заточенням методом плазмового різання, гартування, а також формування посадкових отворів, який відрізняється тим, що посадкові отвори формують перед гартуванням, гартування здійснюють всього робочого органу після плазмового різання і формування посадкових отворів...
Спектрометрична вимірювальна головка для збиральних і інших сільськогосподарських машин
Номер патенту: 86994
Опубліковано: 10.06.2009
Автори: Роде Міхаел, Корманн Георг, Флор Вернер, Гец Мартін, Гойме Вернер, Корренс Ніко
МПК: G01N 21/00, A01D 41/00
Мітки: машин, інших, сільськогосподарських, збиральних, головка, спектрометрична, вимірювальна
Формула / Реферат:
1. Спектрометрична вимірювальна головка для збиральних і інших сільськогосподарських машин, що складається з обладнаного віконцем (2) корпуса (1), у якому розміщені джерело (3) освітлення, спектрометричний пристрій (4) і щонайменше два стандарти (5) для внутрішньої рекалібровки, причому ці стандарти (5) можуть бути повернені вибірково в траєкторію ходу променів вимірювальної головки з можливістю використання для рекалібровки всього...
Попередній патент: Вірус, що викликає захворювання дихальних шляхів у чутливих до цього ссавців
Випадковий патент: Термостабістор