Самохідний зенітний ракетно-гарматний комплекс ближньої дії
Номер патенту: 98905
Опубліковано: 12.05.2015
Автори: Куровська Тетяна Юріївна, Сілко Олексій Вікторович, Мелькін Василь Володимирович, Комаров Володимир Олександрович, Кравченко Олександр Олексійович, Овсяннікова Тетяна Миколаївна, Іванов Борис Павлович, Сайко Володимир Григорович, Рудаков Володимир Іванович, Сендецький Микола Миколайович, Дорофєєв Микола Володимирович, Бугера Михайло Григорович

Формула / Реферат
1. Самохідний зенітний ракетно-гарматний комплекс ближньої дії, який містить обертову башту, встановлену на транспортному засобі, що має гусеничне шасі, і обладнану двома 30-мм зенітними автоматичними гарматами, розміщеними із зовнішньої сторони на хитних частинах башти, і вісьмома блоками напрямних з ракетами, також встановленими на зазначених хитних частинах за допомогою механізмів зчіпки, механізм врівноваження і патронні стрічки для автоматичних гармат, покладені в патронні коробки, які розміщено в артилерійському відсіку усередині башти, при цьому на башті розташовано засоби виявлення цілей - радіолокаційну систему та прицільно-оптичне обладнання, кожну з зенітних автоматичних гармат об'єднано в блок з чотирма напрямними з ракетами, зазначений блок виконано з можливістю підняття в гору на кут не менше 60° відносно поздовжньої осі транспортного засобу, який відрізняється тим, що до складу самохідного зенітного ракетно-гарматного комплексу ближньої дії додатково введено пристрій для підняття засобів виявлення цілей на висоту та платформу для їх розміщення, а до складу засобів виявлення цілей додатково введено систему широкосмугового безпровідного доступу та далекомір, при цьому пристрій для підняття засобів виявлення цілей з платформою розміщено зверху на башті у її задній частині, засоби виявлення цілей, а саме, радіолокаційну систему, прицільно-оптичне обладнання, систему широкосмугового безпровідного доступу та далекомір розміщено на платформі, зазначену платформу закріплено у верхній частині пристрою для підняття засобів виявлення цілей і виконано з можливістю обертання на кут 360° за азимутом з фіксацією у цьому діапазоні при обертанні під будь-яким кутом, причому пристрій для підняття засобів виявлення цілей на висоту виконано з можливістю підняття платформи на висоту не менше 5 метрів відносно верхньої поверхні башти.
2. Самохідний зенітний ракетно-гарматний комплекс за п. 1, який відрізняється тим, що пристрій для підняття засобів виявлення цілей виконано телескопічним.
3. Самохідний зенітний ракетно-гарматний комплекс за п. 1, який відрізняється тим, що пристрій для підняття засобів виявлення цілей виконано розсувним.
Текст
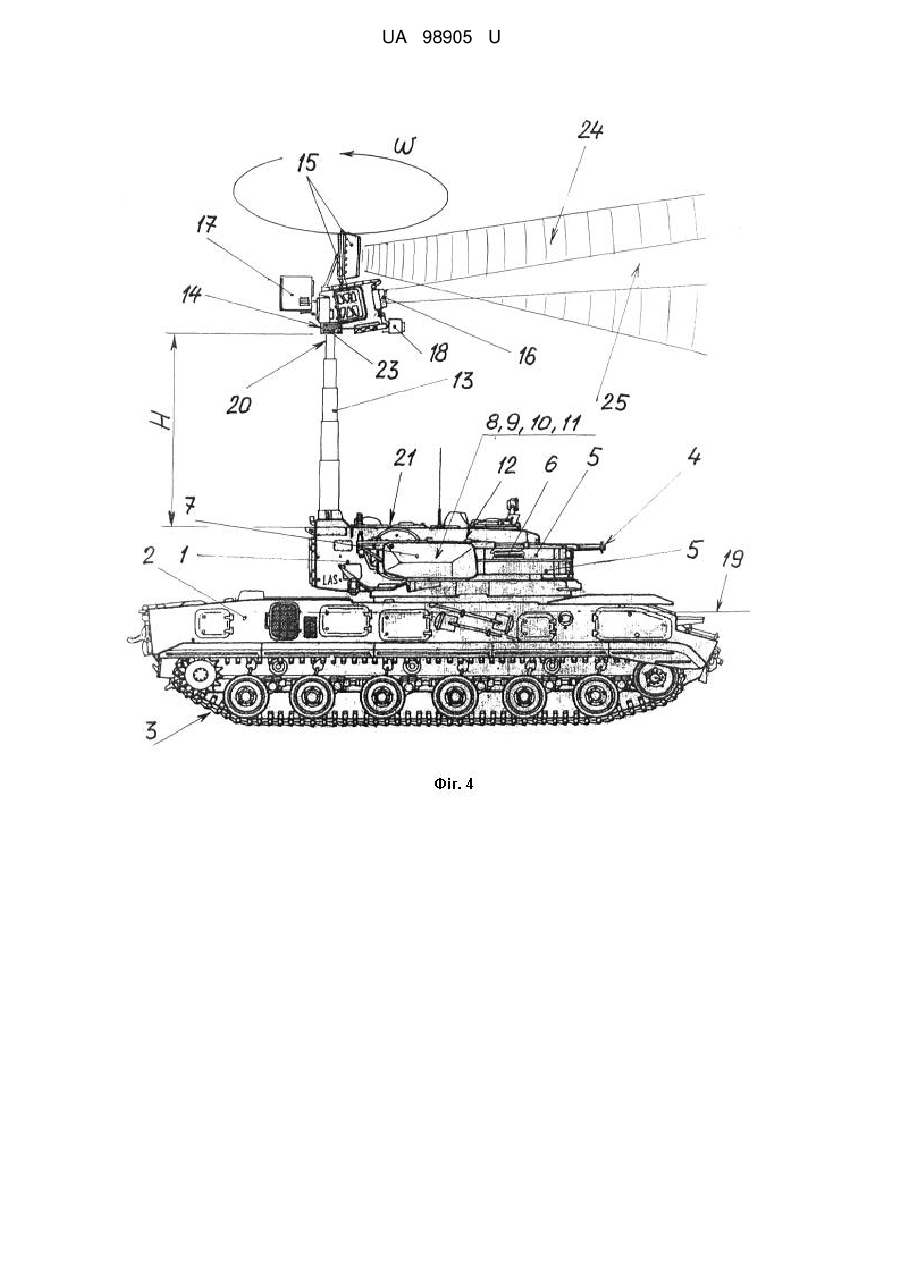
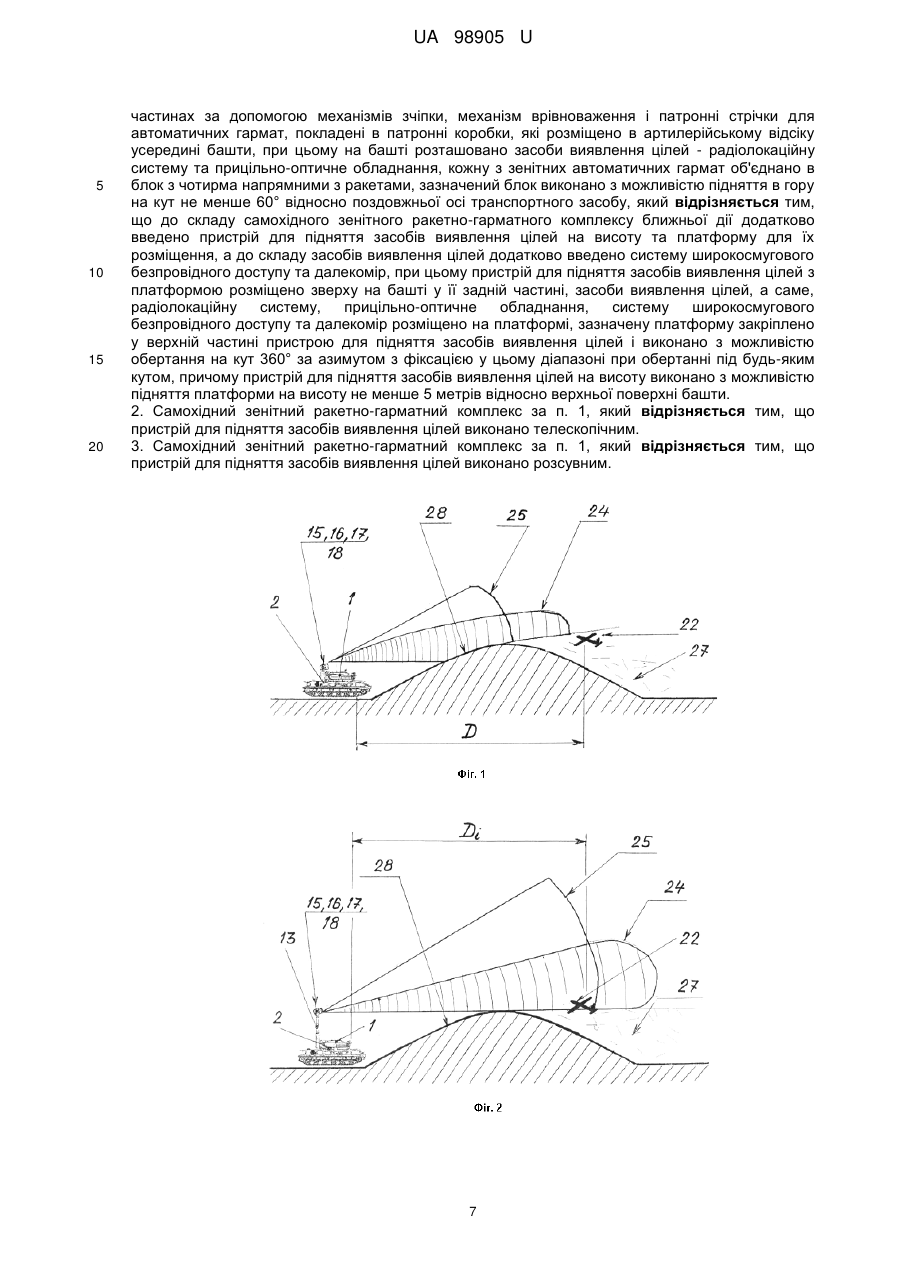
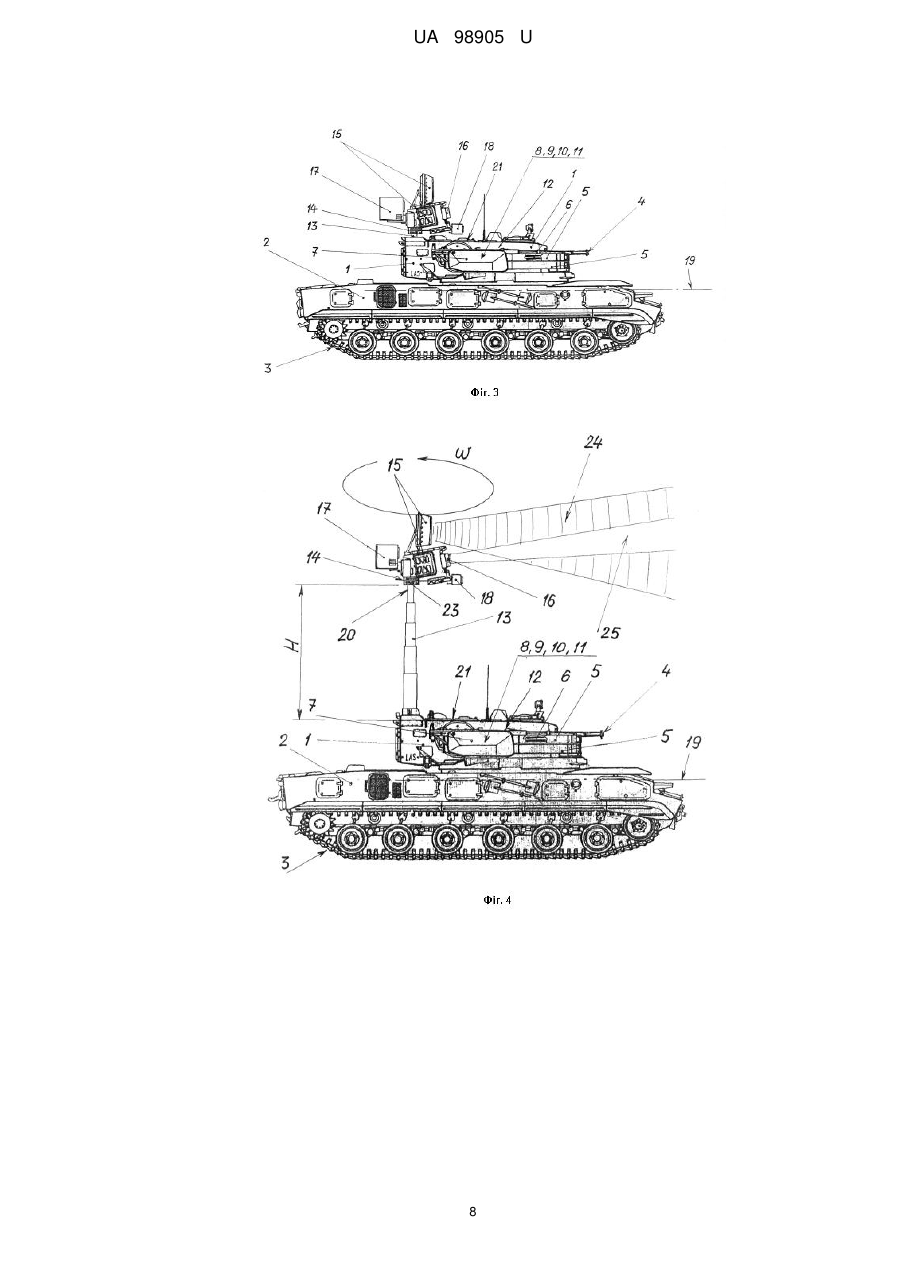
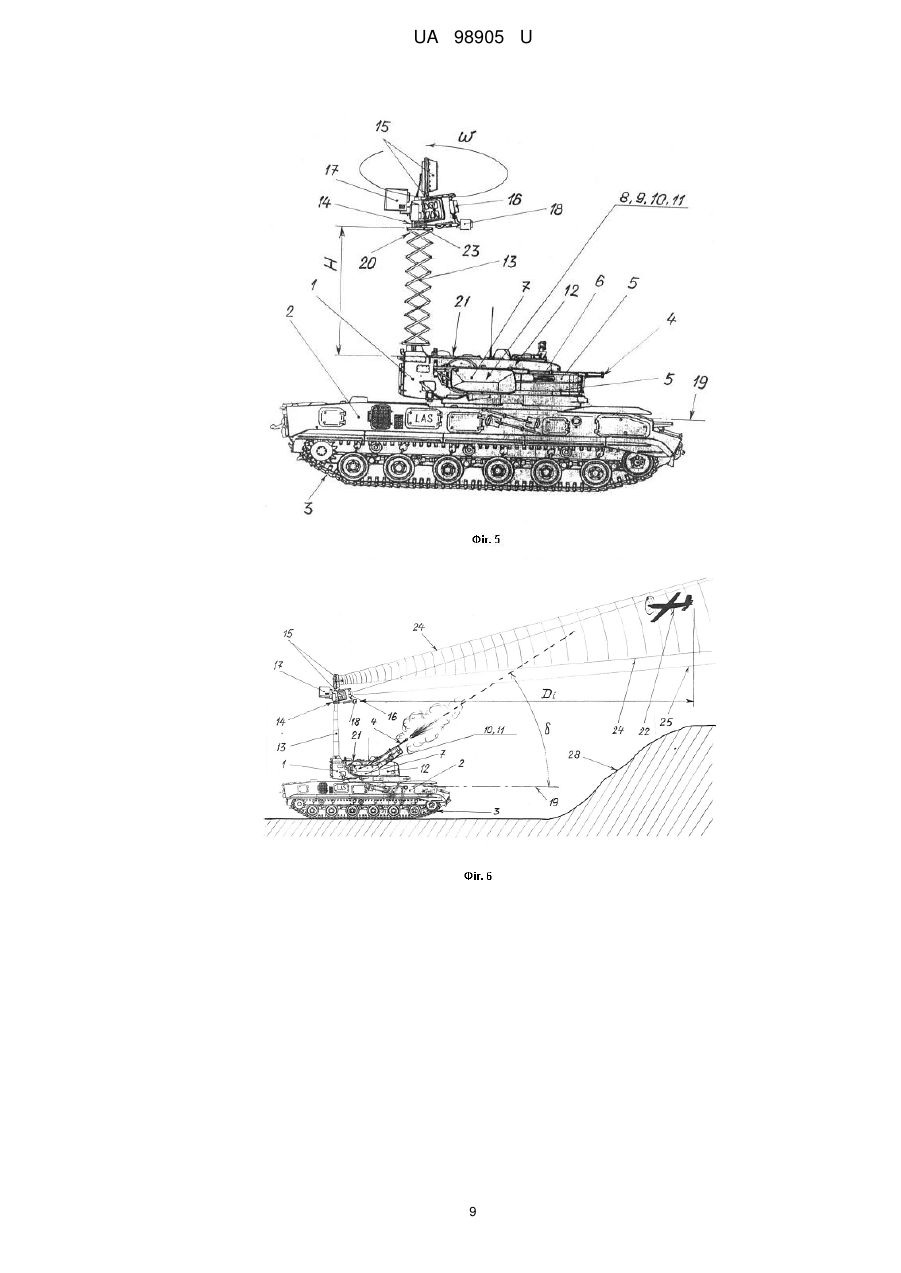
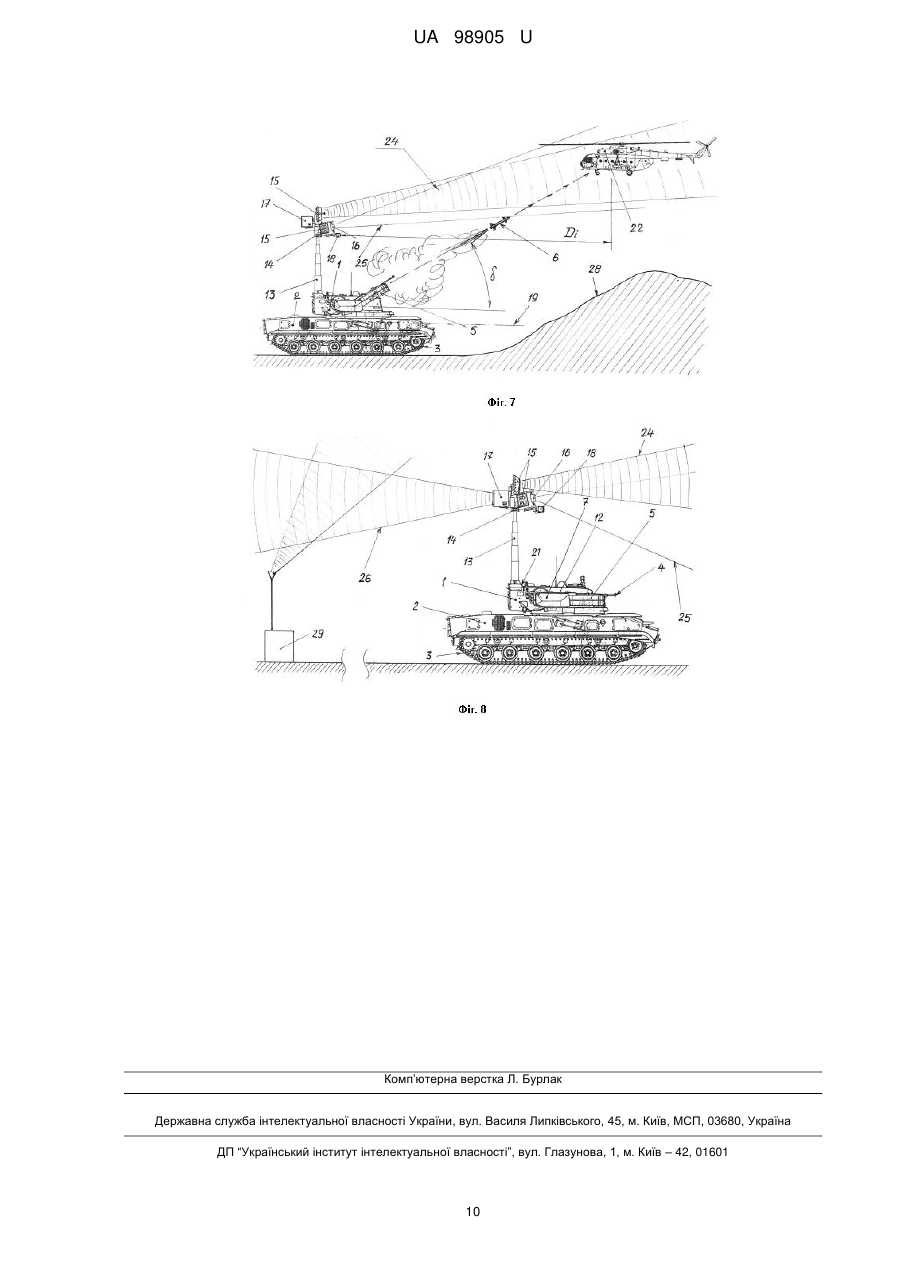
Реферат: Самохідний зенітний ракетно-гарматний комплекс ближньої ді, містить обертову башту, встановлену на транспортному засобі, що має гусеничне шасі, і обладнану двома 30-мм зенітними автоматичними гарматами, розміщеними із зовнішньої сторони на хитних частинах башти, і вісьмома блоками напрямних з ракетами. До складу самохідного зенітного ракетногарматного комплексу ближньої дії додатково введено пристрій для підняття засобів виявлення цілей на висоту та платформу для їх розміщення. UA 98905 U (12) UA 98905 U UA 98905 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі військової техніки, зокрема до зенітних комплексів малої дальності, а саме до самохідних зенітних ракетно-гарматних комплексів ближньої дії, і може бути застосований для захисту бронетанкових частин на марші, а також стаціонарних об'єктів від масованих атак літаків і бойових вертольотів супротивника. Відомий зенітний ракетний комплекс, що містить установлену на носії обертову башту, розміщену на башті пускову установку з ракетами, засоби наведення пускової установки на ціль, пасивну інфрачервону станцію, цифровий обчислювач, блок виділення координат і пульт керування, при цьому ракети оснащені головками самонаведення, приймач інфрачервоної станції встановлений на пусковій установці і виконаний з можливістю кругового огляду та з'єднаний із блоком виділення координат, вихід якого з'єднаний із входом цифрового обчислювача, виходи якого з'єднані з апаратурою запуску ракет і засобами наведення пускової установки на ціль, другий вхід цифрового обчислювача з'єднаний з пультом керування [1]. До недоліків відомого зенітного ракетного комплексу належить те, що він має "мертві" зони виявлення повітряних цілей при розташуванні засобів виявлення повітряних цілей на башті транспортного засобу на висоті не більше 2,5 метрів відносно поверхні землі, що не відповідає тактичним вимогам - невелика дальність визначення повітряної цілі в горбистій місцевості. Відомий зенітний ракетно-гарматний комплекс, що включає в себе башту із приводом наведення й розміщеними на ній радіолокаційною станцією виявлення цілі, радіолокаційною станцією супроводу цілі та ракети, пусковими установками із зенітними керованими ракетами, зенітними автоматами й приводом наведення по куту місця, обчислювальною системою та оптико-електронною системою, при цьому до складу радіолокаційної станції супроводу цілі та ракети входять приводи наведення та блоки виділення координат цілі й ракети, до складу обчислювальної системи входять блок видачі цілевказівки по кутових координатах і дальності для декількох цілей, блок обчислення зонних параметрів, блок виробітку команд керування зенітними керованими ракетами, блок виробітку кутів одвороту пускових установок і башти, пульт пуску, другий блок обчислення зонних параметрів, другий блок виробітку команд керування зенітними керованими ракетами і логічний пристрій, до складу оптико-електронної системи входять тепловізійний прилад з телеавтоматом, інфрачервоний пеленгатор, антена з передавачем команд зенітним керованим ракетам і приводи наведення оптико-електронної системи по куту місця й азимуту з датчиками кутів [2]. До недоліків відомого зенітного ракетно-гарматного комплексу належить те, що він має "мертві" зони виявлення повітряних цілей при розташуванні засобів виявлення повітряних цілей - радіолокаційної станції виявлення цілі та радіолокаційної станції супроводу цілі, на башті транспортного засобу на висоті не більше 2,5 метрів відносно поверхні землі, що не відповідає тактичним вимогам - невелика дальність визначення повітряної цілі в горбистій місцевості. Відомий зенітний ракетний комплекс Crotale NG, що містить розміщені на єдиній платформі пускові установки з ракетами, радіолокаційну систему виявлення цілей і обробки їхніх траєкторій, радіолокаційну систему супроводу цілі й пеленгації ракети й сполучені конструктивно з нею оптичні засоби, при цьому до складу оптичних засобів входять система переднього огляду FLIR із двома секторами огляду, денна телевізійна камера з телеавтоматом супроводу цілі й ракети, інфрачервоний пеленгатор захвата ракети і її наведення протягом перших секунд польоту [3]. Виявлена ціль передається на радіолокаційну станцію супроводу, що супроводжує ціль, а в режимі наведення зенітних керованих ракет для забезпечення її пеленгації використовується перемикання по частоті від імпульсу до імпульсу й від пакета до пакета. У процесі польоту ракети приймач-передавач радіолокаційної станції супроводу цілі працює в режимі маневреності по частоті й стиску імпульсів, що забезпечує передачу команд на борт зенітної керованої ракети [4]. У випадку гарної видимості, а також для дублювання використовується для супроводу цілі й ракети та телевізійної камери з телеавтоматом, зенітний ракетний комплекс Crotale NG є повністю автономною й автоматизованою системою, завдяки високому рівню автоматизації має час реакції 5-8 с. До недоліків відомого зенітного ракетного комплексу Crotale NG належить те, що він має "мертві" зони виявлення повітряних цілей при розташуванні засобів виявлення повітряних цілей - радіолокаційної станції виявлення цілі та радіолокаційної станції супроводу цілі, на башті транспортного засобу на висоті не більше 2,5 метрів відносно поверхні землі, що не відповідає тактичним вимогам - невелика дальність визначення повітряної цілі в горбистій місцевості. Недоліками також є мала ефективність поразки цілей на дальності більше 4000 м ракетним озброєнням, а також низькі характеристики ракетного озброєння, що застосовується. Відомий комплект озброєння для бойової машини, що містить шасі й установлене на ньому піднімальний пристрій, при цьому з піднімальним пристроєм шарнірно з'єднано рухому бойову платформу з керованими бойовими засобами [5]. 1 UA 98905 U 5 10 15 20 25 30 35 40 45 50 55 60 До недоліків відомого комплекту озброєння для бойової машини належить те, що воно має "мертві" зони виявлення повітряних цілей при розташуванні засобів виявлення повітряних цілей - радіолокаційної станції виявлення цілі та радіолокаційної станції супроводу цілі, на башті транспортного засобу на висоті не більше 2,5 метрів відносно поверхні землі, що не відповідає тактичним вимогам - невелика дальність визначення повітряної цілі в горбистій місцевості. Недоліками також є мала ефективність поразки цілей на дальності більше 4000 м керованими бойовими засобами, а також низькі характеристики керованих бойових засобів, що застосовується. Відома бронемашина із зенітним озброєнням, що має обертову башту, зазначена башта охоплює відсік з екіпажем і оснащена оптичними й радіолокаційними приладами виявлення й спостереження за ціллю, на бічних стінках башти із зовнішньої сторони встановлені дві зенітні автоматичні гармати, які усередині башти мають відсіки з патронною стрічкою, з відсіку патронна стрічка через торцеву цапфу подається до гармати, на задній стороні башти розташовано приймач-передавач радіолокатора кругового огляду, антена якого обертається на кронштейні в робочому положенні над дахом башти й за допомогою настановного механізму опускається в захищене місце, при цьому на передній стороні башти між стволами гармат і нижче їх установлений корпус радара спостереження за ціллю, що повертається щодо башти, й антенний екран, причому радар повертається з робочого положення в транспортне в захищене місце [6]. Недоліком бронемашини є підвищена загазованість у відсіку з екіпажем усередині башти після стрільбі з автоматичних гармат тому, що порохові гази через отвір у цапфі для підведення патронної стрічки мають можливість проникати у башту. До недоліків відомої бронемашини із зенітним озброєнням відноситься те, що вона має "мертві" зони виявлення повітряних цілей при розташуванні засобів виявлення повітряних цілей - радіолокаційної станції виявлення цілі та радіолокаційної станції супроводу цілі, на башті транспортного засобу на висоті не більше 2,5 метрів відносно поверхні землі, що не відповідає тактичним вимогам - невелика дальність визначення повітряної цілі в горбистій місцевості. Відомий зенітний ракетний комплекс "Панцир-31", що містить баштову установку з ракетним і гарматним озброєнням, розташовану на шасі колісного тягача, зокрема, автомобіля "Урал", спеціальний кузов, у якому розташована апаратура керування й бойовий розрахунок, блок електроживлення, систему виявлення й супроводу цілі, при цьому станція виявлення цілі вбирається в похідному положенні, а станція супроводу цілі встановлена з можливістю повороту в азимутальній площині на кут не менше 180° і вертикальній площині на кут не менше 90° [7]. Недоліком зенітного ракетного комплексу "Панцир-31" є обмежена область її застосування (тільки в самохідному варіанті), що підвищує уразливість екіпажа установки. До недоліків відомого зенітного ракетного комплексу "Панцир-31" належить й те, що він має "мертві" зони виявлення повітряних цілей при розташуванні засобів виявлення повітряних цілей радіолокаційної станції виявлення цілі та радіолокаційної станції супроводу цілі, на башті транспортного засобу на висоті не більше 2,5 метрів відносно поверхні землі, що не відповідає тактичним вимогам - невелика дальність визначення повітряної цілі в горбистій місцевості. Відома зенітна установка, що містить обертову башту, на бічних стінках якої із зовнішньої сторони встановлено дві автоматичні пушки, а на передній стінці між стволами гармат встановлена станція спостереження за ціллю, що повертається відносно башти, при цьому автоматичні гармати містять два закритих кожухи охолодження ствола, на вушках кожуха охолодження в дульній частині далекого від поздовжньої осі стволів закріплений локалізатор з поздовжніми вікнами, спрямованими нагору й долілиць, на локалізаторі співвісно каналу ствола встановлений датчик початкової швидкості, а на вушках кожуха охолодження ствола, ближнього до поздовжньої осі башти, встановлений циліндричний патрубок [8]. До недоліків відомої зенітної установки належить й те, що він має "мертві" зони виявлення повітряних цілей при розташуванні засобів виявлення повітряних цілей - радіолокаційної станції виявлення цілі та радіолокаційної станції супроводу цілі, на башті транспортного засобу на висоті не більше 2,5 метрів відносно поверхні землі, що не відповідає тактичним вимогам невелика дальність визначення повітряної цілі в горбистій місцевості. Найбільш близьким технічним рішенням, як за суттю, так і за задачею, що вирішується, яке вибрано за найближчий аналог (прототип) за найбільш близькою до запропонованого за сукупністю загальних істотних ознак, є самохідний зенітний ракетно-гарматний комплекс ближньої дії, який містить обертову башту, встановлену на транспортному засобі, що має гусеничне шасі, і обладнану двома 30-мм зенітними автоматичними гарматами, розміщеними із зовнішньої сторони на хитних частинах башти, і вісьмома блоками напрямних з ракетами, також встановленими на зазначених хитних частинах за допомогою механізмів зчіпки, механізм 2 UA 98905 U 5 10 15 20 25 30 35 40 45 50 55 врівноваження і патронні стрічки для автоматичних гармат, покладені в патронні коробки, які розміщено в артилерійському відсіку усередині башти, при цьому на башті розташовано засоби виявлення цілей - радіолокаційну систему та прицільно-оптичне обладнання, кожну з зенітних автоматичних гармат об'єднано в блок з чотирма напрямними з ракетами, зазначений блок виконано з можливістю підняття вгору на кут не менше 60° відносно поздовжньої осі транспортного засобу [9]. До недоліків відомого самохідного зенітного ракетно-гарматного комплексу ближньої дії, який вибрано за найближчий аналог (прототип), належить те, що він має "мертві" зони виявлення повітряних цілей при розташуванні засобів виявлення повітряних цілей радіолокаційної системи та прицільно-оптичного обладнання, на башті комплексу на висоті не більше 2,5 метрів відносно поверхні землі), що не відповідає тактичним вимогам. До недоліків відомого самохідного зенітного ракетно-гарматного комплексу ближньої дії належить й те, що не забезпечується передача on-line всієї бойової інформації та дій екіпажу на командний пункт. В основу корисної моделі поставлено задачу шляхом встановлення засобів виявлення повітряних цілей - радіолокаційної системи, прицільно-оптичного обладнання, системи широкосмугового безпровідного доступу та далекоміру на пристрої, що висувається вверх (при розміщенні зазначених пристроїв на платформі, закріпленій на вільному кінці висувного вверх пристрою - телескопічного чи розсувного), забезпечити у комплексі зменшення "мертвих" зон виявлення повітряних цілей та збільшити дальність виявлення малорозмірних повітряних цілей типу безпілотних літальних апаратів, з точним визначенням дальності до цілі, а також передачу всієї бойової інформації на командний пункт по каналу передачі телекомунікаційної інформації. Суть корисної моделі в самохідному зенітному ракетно-гарматному комплексі ближньої дії, що містить обертову башту, встановлену на транспортному засобі, що має гусеничне шасі, і обладнану двома 30-мм зенітними автоматичними гарматами, розміщеними із зовнішньої сторони на хитних частинах башти, і вісьмома блоками напрямних з ракетами, також встановленими на зазначених хитних частинах за допомогою механізмів зчіпки, механізм врівноваження і патронні стрічки для автоматичних гармат, покладені в патронні коробки, які розміщено в артилерійському відсіку усередині башти, при цьому на башті розташовано засоби виявлення цілей -радіолокаційну систему та прицільно-оптичне обладнання, кожну з зенітних автоматичних гармат об'єднано в блок з чотирма напрямними з ракетами, зазначений блок виконано з можливістю підняття в гору на кут не менше 60° відносно поздовжньої осі транспортного засобу, полягає в тому, що до складу самохідного зенітного ракетно-гарматного комплексу ближньої дії додатково введено пристрій для підняття засобів виявлення цілей на висоту та платформу для їх розміщення, а до складу засобів виявлення цілей додатково введено систему широкосмугового безпровідного доступу та далекомір. Суть корисної моделі полягає і в тому, що пристрій для підняття засобів виявлення цілей з платформою розміщено зверху на башті у її задній частині, засоби виявлення цілей, а саме, радіолокаційну систему, прицільно-оптичне обладнання, систему широкосмугового безпровідного доступу та далекомір розміщено на платформі, зазначену платформу закріплено у верхній частині пристрою для підняття засобів виявлення цілей і виконано з можливістю обертання на кут 360° за азимутом з фіксацією у цьому діапазоні при обертанні під будь-яким кутом. Суть корисної моделі полягає також і в тому, що пристрій для підняття засобів виявлення цілей на висоту виконано з можливістю підняття платформи на висоту не менше 5 метрів відносно верхньої поверхні башти. Новим в корисній моделі є те, що пристрій для підняття засобів виявлення цілей виконано або телескопічним, або розсувним. Порівняння технічного рішення, що заявляється, із прототипом, дозволяє зробити висновок, що самохідний зенітний ракетно-гарматний комплекс ближньої дії, який заявляється, відрізняється тим, що до складу самохідного зенітного ракетно-гарматного комплексу ближньої дії додатково введено пристрій для підняття засобів виявлення цілей на висоту та платформу для їх розміщення, до складу засобів виявлення цілей додатково введено систему широкосмугового безпровідного доступу та далекомір, пристрій для підняття засобів виявлення цілей з платформою розміщено зверху на башті у її задній частині, засоби виявлення цілей, а саме радіолокаційну систему, прицільно-оптичне обладнання, систему широкосмугового безпровідного доступу та далекомір розміщено на платформі, зазначену платформу закріплено у верхній частині пристрою для підняття засобів виявлення цілей і виконано з можливістю обертання на кут 360° за азимутом з фіксацією у цьому діапазоні при обертанні під будь-яким кутом, пристрій для підняття засобів виявлення цілей на висоту виконано з можливістю підняття платформи на висоту не менше 5 метрів відносно верхньої поверхні башти, зазначений пристрій для підняття засобів виявлення цілей виконано або телескопічним, або розсувним. 3 UA 98905 U 5 10 15 20 25 30 35 40 45 50 55 60 Суть корисної моделі пояснюється за допомогою креслень, де на фіг. 1 представлено зони виявлення, сформовані радіолокаційним та оптичним засобами виявлення повітряних цілей в кутомістній площині самохідним зенітним ракетно-гарматним комплексом ближньої дії, вибраним за прототип, на фіг. 2 представлено зони виявлення, сформовані радіолокаційним та оптичним засобами виявлення повітряних цілей в кутомістній площині самохідним зенітним ракетно-гарматним комплексом ближньої дії, що заявляється, із розташованими на пристрої для підняття засобів виявлення повітряних цілей на висоту зазначеними пристроями, на фіг. 3 показано конструктивно-компонувальну схему самохідного зенітного ракетно-гарматного комплексу ближньої дії, з убраним у транспортне положення пристроєм підняття на висоту засобів виявлення повітряних цілей, на фіг. 4 показано конструктивно-компонувальну схему самохідного зенітного ракетно-гарматного комплексу ближньої дії при висуванні в робоче положення пристрою підняття на висоту засобів виявлення повітряних цілей, який виконано телескопічного типу, на фіг. 5 показано конструктивно-компонувальну схему самохідного зенітного ракетно-гарматного комплексу ближньої дії при розкладанні в робоче положення пристрою підняття на висоту засобів виявлення повітряних цілей, який виконано розсувного типу, на фіг. 6 показано схему стрільби по повітряній цілі з 30-мм зенітних автоматичних гармат, на фіг. 7 показано схему стрільби по повітряній цілі типу безпілотний літальний апарат ракетами з напрямних, на фіг. 8 показано схему передачі всієї бойової інформації на командний пункт по каналу передачі телекомунікаційної інформації через систему широкосмугового безпровідного доступу. Самохідний зенітний ракетно-гарматний комплекс ближньої дії, який заявляється, містить (як варіант конструктивного виконання) обертову башту 1, встановлену на транспортному засобі 2, що має гусеничне шасі 3, і обладнану двома 30-мм зенітними автоматичними гарматами 4, розміщеними із зовнішньої сторони на хитних частинах башти 1, і вісьмома блоками напрямних 5 з ракетами 6, також встановленими на зазначених хитних частинах 7 за допомогою механізмів 8 зчіпки, механізм 9 врівноваження і патронні стрічки 10 для автоматичних гармат 4, покладені в патронні коробки 11, які розміщено в артилерійському відсіку 12 усередині башти 1, пристрій 13 для підняття засобів виявлення цілей на висоту та платформу 14 для їх розміщення, та безпосередньо засоби виявлення цілей (позиції 15, 16, 17, 18) - див. схему на фіг. 3. Конструктивно як засоби виявлення цілей використовують радіолокаційну систему 15, прицільно-оптичне обладнання 16, систему 17 широкосмугового безпровідного доступу та далекомір 18. При цьому кожну з зенітних автоматичних гармат 4 об'єднано в блок з чотирма напрямними 5 з ракетами 6, зазначений блок виконано з можливістю підняття в гору на кут δ не менше 60° відносно поздовжньої осі 19 транспортного засобу 2. Конструктивно та технологічно: - пристрій 13 для підняття засобів виявлення цілей з платформою 14 розміщено зверху на башті 1 у її задній частині (див. схему на фіг. 3), - засоби виявлення цілей, а саме радіолокаційну систему 15, прицільно-оптичне обладнання 16, систему 17 широкосмугового безпровідного доступу та далекомір 18 розміщено на платформі 14 (див. схему на фіг. 3), - зазначену платформу 14 закріплено у верхній частині 20 пристрою для підняття засобів виявлення цілей і виконано з можливістю обертання ω на кут 360° за азимутом з фіксацією у цьому діапазоні кутів обертанні під будь-яким кутом, - пристрій 13 для підняття засобів виявлення цілей на висоту виконано з можливістю підняття платформи 14 (із розміщеними на ній засобами виявлення повітряних цілей, а саме радіолокаційною системою 15, прицільно-оптичним обладнанням 16, системою 17 широкосмугового безпровідного доступу та далекоміром 18) на висоту Н не менше 5 метрів відносно верхньої поверхні 21 башти 1 (див. схеми на фіг. 4-5). Конструктивно та технологічно у самохідному зенітному ракетно-гарматному комплексі ближньої дії, який заявляється, пристрій 13 для підняття засобів виявлення цілей виконано: - телескопічним (як перший варіант конструктивного виконання пристрою 13) - див. схеми на фіг. 4, 6-8. - розсувним (як другий варіант конструктивного виконання пристрою 13) - див. схему на фіг. 5. Збільшення дальності D виявлення повітряних цілей 22, наприклад, ветрольотів чи безпілотних літальних апаратів самохідним зенітним ракетно-гарматним комплексом ближньої дії (що заявляється) здійснюється наступним чином (див. схему на фіг. 2). Попередньо модернізують самохідний зенітний ракетно-гарматний комплекс ближньої дії шляхом встановлення на обертовій башті 1 комплексу (транспортного засобу 2) пристрою 13 4 UA 98905 U 5 10 15 20 25 30 35 40 45 50 55 60 для підняття засобів виявлення повітряних цілей на висоту. При цьому встановлюють пристрій 13, який виконано або телескопічним (див., відповідно, схеми на фіг. 2, 4, 6-8), який забезпечує підняття платформи 14 із розміщеними на ній засобами виявлення повітряних цілей (а саме, радіолокаційною системою 15, прицільно-оптичним обладнанням 16, системою 17 широкосмугового безпровідного доступу та далекоміром 18) на висоту Н не менше 5 метрів відносно верхньої поверхні 21 башти 1 комплексу (транспортного засобу 2), або розсувним (див. схему на фіг. 5), який забезпечує підняття платформи 14 із розміщеними на ній зазначеними засобами (позиції 15, 16, 17 і 18) виявлення повітряних цілей 22 на висоту Н не менше 5 метрів відносно верхньої поверхні 21 башти 1 комплексу (транспортного засобу 2). Далі закріплюють на вільному кінці (у верхній частині 20) пристрою 13 платформу 14, яку встановлюють у точці кріплення 23 з можливістю обертання ω її за азимутом по горизонту на кут 360° відносно зазначеної точки 23 кріплення, при цьому платформу 14 можна фіксувати при обертанні за азимутом у зазначеному діапазоні кутів обертанні під будь-яким кутом. Після цього розміщують на платформі 14 засоби виявлення повітряних цілей (а саме, радіолокаційну систему 15, прицільно-оптичне обладнання 16, систему 17 широкосмугового безпровідного доступу та далекомір 18) - див. схему на фіг. 3 та схеми на фіг. 4-8. Пристрій 13 для підняття засобів виявлення повітряних цілей на висоту виконано з можливістю підняття платформи 14 (з розміщеними на ній радіолокаційною системою 15, прицільно-оптичним обладнанням 16, системою 17 широкосмугового безпровідного доступу та далекоміром 18) на висоту Н не менше 5 метрів відносно верхньої поверхні 21 башти 1 транспортного засобу 2 [10]. В похідному положенні пристрій 13 для підняття засобів виявлення повітряних цілей на висоту знаходиться у прибраному положенні, при цьому платформа 14 (з розміщеними на ній радіолокаційною системою 15, прицільно-оптичним обладнанням 16, системою 17 широкосмугового безпровідного доступу та далекоміром 18) прилягає до верхньої поверхні башти 1 (див. схему на фіг. 3). У бойовій обстановці здійснюють підняття платформи 14 (з розміщеними на ній радіолокаційною системою 15, прицільно-оптичним обладнанням 16, системою 17 широкосмугового безпровідного доступу та далекоміром 18) на висоту Н (на висоту більше 5 метрів відносно верхньої поверхні 21 башти 1 комплексу 2 (за допомогою або пристрою 13 телескопічного типу (див. схеми на фіг. 2, 4, 6-8), або пристрою 13 розсувного типу (див., відповідно, схему на фіг. 5). Підняті на деяку висоту Н над баштою 1 бойової машини (транспортного засобу 2, що має гусеничне шасі 3) засоби виявлення повітряних цілей (позиції 15, 16, 17 і 18) формують зони виявлення (позиції 24, 25), що перекривають одна другу в просторі, а також зону 26 прийому та передачі телекомунікаційної інформації (див. схему на фіг. 8). Так радіолокаційна система 15 та прицільно-оптичне обладнання 16 (що розташовані на пристрої 13 та призначені для виявлення повітряних цілей 22) формують зони виявлення радіолокаційного каналу 24 та оптичного каналу 25, які більші за відстанню D (див. схему на фіг. 2), ніж зони виявлення (позиція 24 і 25), сформовані радіолокаційною системою 15 та прицільнооптичним обладнанням 16, які розташовано, як на прототипі, безпосередньо на башті 1 бойової машини 2 без підняття на висоту Н за допомогою пристрою 13 (див., відповідно, схему на фіг. 1). Повітряна ціль - позиція 22, наприклад, вертоліт чи безпілотний літальний апарат буде змінювати своє положення в просторі, що призведе до входження його в зону 24 виявлення радіолокаційного каналу (радіолокаційної системи 15) та в зону 25 виявлення оптичного каналу (прицільно-оптичного обладнання 16). Таким чином, завдяки підняттю на висоту Н (за допомогою пристрою 13) засобів (позиції 15, 16, 17 і 18) виявлення повітряних цілей 22 зменшуються "мертві" зони 27 та збільшується дальність Dі виявлення малорозмірної повітряної цілі 22 (за допомогою далекоміру 18) відносно поверхні 28 землі (див. схему на фіг. 2). При входженні повітряної цілі 22 в зону виявлення (позиції 24 і 25), за допомогою радіолокаційного каналу 24 (що створюється радіолокаційною системою 15), або за допомогою оптичного каналу 25 (що створюється прицільно-оптичним обладнанням 16), або сумісно за допомогою радіолокаційного каналу 24 та оптичного каналу 25 здійснюють захват повітряної цілі 22 у приціл (див. схему на фіг. 2). При цьому постійно контролюється за допомогою далекоміру дальність Dі до повітряної цілі 22, щоб ввести дані для стрільби по ній з зенітних 30мм гармат 4 чи ракетами 6 (з пускових установок 5, об'єднаних у блоки). При захваті повітряної цілі 22 здійснюють наведення на неї озброєння шляхом підняття на певний кут блока озброєння (гармати 4 та з'єднаних з нею напрямних 5, споряджених ракетами 5 UA 98905 U 5 10 15 20 25 30 35 40 45 50 55 60 6). Поворот зазначеного блока озброєння здійснюється за допомогою хитної частини 7, механізму 8 зчіпки та механізму 9 врівноваження (див. схеми на фіг. 6-7). При рішенні оператором комплексу щодо дії по повітряній цілі 22 (наприклад, по вертольоту) ракетами 6, здійснюють вибір кута δ наведення блока озброєння на ціль 22 (за допомогою хитної частини 7, механізму 8 зчіпки та механізму 9 врівноваження) і пуск ракет 6 з напрямних 5 у бік цілі 22 (див. схему на фіг. 6). Пуск зенітних керованих ракет 6 здійснюють з восьми пускових установок 5 (розміщених на бічних поверхнях башти 1 самохідного зенітного ракетногарматного комплексу ближньої дії [9] (насамперед, типу "Тунгуска" [10]). При рішенні оператором комплексу щодо дії по повітряній цілі 22 (наприклад, по безпілотному літальному апарату) з 30-мм зенітних автоматичних гармат 4, здійснюють вибір кута 8 наведення блока озброєння на ціль 22 та ведуть стрільбу двома двоствольними 30-мм зенітними автоматичними гарматами 4 (які з'єднано патронними стрічками 10 з патронними коробками 11, які розміщено в артилерійському відсіку 12 обертової башти 1 транспортного засобу 2) - див. схему на фіг. 7. Точність прицілювання при цьому забезпечується постійним корегуванням дальності Dі до цілі 22 за допомогою далекоміру 18. Вся бойова інформація передається на командний пункт 29 по каналу 26 передачі телекомунікаційної інформації (див. схему на фіг. 8) за допомогою системи 17 широкосмугового безпровідного доступу. Підвищення ефективності застосування самохідного зенітного ракетно-гарматного комплексу ближньої дії, у порівнянні з прототипом, досягається шляхом розміщення засобів виявлення повітряних цілей (радіолокаційної системи та прицільно-оптичного обладнання) на платформі, що піднімається вверх за допомогою пристрою для їх підняття, чим забезпечується збільшення дальності виявлення малорозмірних повітряних цілей типу безпілотних літальних апаратів. Збільшення дальності виявлення малорозмірних повітряних цілей, а саме, безпілотних літальних апаратів, самохідним зенітним ракетно-гарматним комплексом ближньої дії, що заявляється, у порівнянні з прототипом, досягається шляхом підняття на висоту не менше 5 метрів (за допомогою відповідного пристрою) засобів виявлення повітряних цілей (радіолокаційної системи та прицільно-оптичного обладнання), що призводить до зменшення "мертвих" зон щодо виявлення повітряних цілей (насамперед, безпілотних літальних апаратів, які здійснюють політ на висотах від 20 метрів і вище) та збільшення дальності виявлення повітряних цілей радіолокаційним та оптичним каналами, а також далекоміром. Підвищення ефективності застосування самохідного зенітного ракетно-гарматного комплексу ближньої дії, у порівнянні з прототипом, досягається також шляхом введення до складу комплексу системи широкосмугового безпровідного доступу, яка забезпечує передачу всієї бойової інформації на командний пункт по каналу передачі телекомунікаційної інформації. Джерела інформації: 1. Патент РФ № 2241193 "Зенітний ракетний гарматний комплекс ближньої дії", МПК 8 F 41 D 7/00-7/04 - аналог. 2. Патент РФ № 2131577 "Зенітний ракетно-гарматний комплекс", МПК 8 F 41 D 7/00-7/04 аналог. 3. Журнал "Defense et Armement", 1989, N 89, p. 76. - аналог. 4. Журнал Armada, 1989, V. 13, N 2, рр 94-95. 5. Заявка ЕПВ(ЕР), заявка № 0388762 "Комплект озброєння для бойової машини" від 26.09.90 р., МПК 6 F 41 А 23/20 - аналог. 6. Заявка Німеччини № 1800330 "Бронемашина із зенітним озброєнням" від 18.08.77 p., МПК 6 F41 А7/12 - аналог. 7. Журнал "Зброя Росії", каталог, т. VII, М., АТЗТ "Військовий парад", 1997 р., с. 247-251 "Зенітний ракетний комплекс "Панцир-31" - аналог. 8. Патент РФ № 2195618 "Зенітна установка", МПК 8 F 41 D 7/00-7/04 - аналог. 9. Каталог "Вооружение России", т. 1, - М.: AT "Милитэри Пэрэйд", 1995, с. 134-135, 240-242 "Зенитный пушечно-ракетный комплекс "Тунгуска" - прототип. 10. "Зенитный пушечно-ракетный комплекс "Тунгуска" / Под редакцией Ждановича Б.К. - М.: Военное издательство Министерства обороны СССР, 1991. - 248 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Самохідний зенітний ракетно-гарматний комплекс ближньої дії, який містить обертову башту, встановлену на транспортному засобі, що має гусеничне шасі, і обладнану двома 30-мм зенітними автоматичними гарматами, розміщеними із зовнішньої сторони на хитних частинах башти, і вісьмома блоками напрямних з ракетами, також встановленими на зазначених хитних 6 UA 98905 U 5 10 15 20 частинах за допомогою механізмів зчіпки, механізм врівноваження і патронні стрічки для автоматичних гармат, покладені в патронні коробки, які розміщено в артилерійському відсіку усередині башти, при цьому на башті розташовано засоби виявлення цілей - радіолокаційну систему та прицільно-оптичне обладнання, кожну з зенітних автоматичних гармат об'єднано в блок з чотирма напрямними з ракетами, зазначений блок виконано з можливістю підняття в гору на кут не менше 60° відносно поздовжньої осі транспортного засобу, який відрізняється тим, що до складу самохідного зенітного ракетно-гарматного комплексу ближньої дії додатково введено пристрій для підняття засобів виявлення цілей на висоту та платформу для їх розміщення, а до складу засобів виявлення цілей додатково введено систему широкосмугового безпровідного доступу та далекомір, при цьому пристрій для підняття засобів виявлення цілей з платформою розміщено зверху на башті у її задній частині, засоби виявлення цілей, а саме, радіолокаційну систему, прицільно-оптичне обладнання, систему широкосмугового безпровідного доступу та далекомір розміщено на платформі, зазначену платформу закріплено у верхній частині пристрою для підняття засобів виявлення цілей і виконано з можливістю обертання на кут 360° за азимутом з фіксацією у цьому діапазоні при обертанні під будь-яким кутом, причому пристрій для підняття засобів виявлення цілей на висоту виконано з можливістю підняття платформи на висоту не менше 5 метрів відносно верхньої поверхні башти. 2. Самохідний зенітний ракетно-гарматний комплекс за п. 1, який відрізняється тим, що пристрій для підняття засобів виявлення цілей виконано телескопічним. 3. Самохідний зенітний ракетно-гарматний комплекс за п. 1, який відрізняється тим, що пристрій для підняття засобів виявлення цілей виконано розсувним. 7 UA 98905 U 8 UA 98905 U 9 UA 98905 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Автори англійськоюSaiko Volodymyr Hryhorovych, Kurovska Tetiana Yuriivna, Ovsiannikova Teriana Mykolaivna, Sendetskyi Mykola Mykolaiovych, Buhera Mykhailo Hryhorovych, Rudakov Volodymyr Ivanovych, Ivanov Borys Pavlovych
Автори російськоюСайко Владимир Григорьевич, Куровская Татьяна Юрьевна, Овсянникова Татьяна Николаевна, Сендецкий Николай Николаевич, Бугера Михаил Григоьевич, Рудаков Владимир Иванович, Иванов Борис Павлович
МПК / Мітки
МПК: F41F 1/00
Мітки: дії, ближньої, ракетно-гарматний, зенітний, самохідний, комплекс
Код посилання
<a href="https://ua.patents.su/12-98905-samokhidnijj-zenitnijj-raketno-garmatnijj-kompleks-blizhno-di.html" target="_blank" rel="follow" title="База патентів України">Самохідний зенітний ракетно-гарматний комплекс ближньої дії</a>
Зенітний ракетний гарматний комплекс ближньої дії
Номер патенту: 98874
Опубліковано: 12.05.2015
Автори: Куровська Тетяна Юріївна, Головін Олексій Олександрович, Завадський Дмитро Станіславович, Маланчук Андрій Миколайович, Білобородов Олег Олександрович, Волошин Олег Олексійович, Степаненко Юрий Константинович, Слободенюк Сергій Йосипович, Бунаков Вадим Петрович, Козлов Вадим Геннадійович, Семенюк Римма Петрівна
МПК: F41F 1/00
Мітки: зенітний, гарматний, ракетний, комплекс, дії, ближньої
Формула / Реферат:
1. Зенітний ракетний гарматний комплекс ближньої дії, що містить бойову машину з розташованою на ній баштовою установку з двома двоствольними 30-мм автоматичними гарматами і вісьмома пусковими установками з зенітними керованими ракетами, при цьому на баштовій установці розташовано засоби виявлення повітряних цілей - радіолокаційну систему та прицільно-оптичне обладнання, який відрізняється тим, що до складу зенітного ракетного гарматного...
Переносний зенітний ракетний комплекс

Номер патенту: 63801
Опубліковано: 15.01.2004
Автори: Бузанов Віктор Іванович, Молодик Анатолій Володимирович, Кузьмін Лев Васильович, Заболотний Іван Іванович, Шумов Сергій Олександрович
Мітки: переносний, зенітний, комплекс, ракетний
Формула / Реферат:
1. Переносний зенітний ракетний комплекс, який включає керовану ракету з інфрачервоною головкою самонаведення з частотною модуляцією і з селектором, яка електрично і пневматично з'єднана з пусковим пристроєм, що включає в себе транспортно-пусковий контейнер, пусковий механізм і блок живлення, який відрізняється тим, що селектор інфрачервоної головки самонаведення виконаний з можливістю використання кінематичної ознаки відмінності цілі від...
Мобільний самохідний електротехнічний комплекс фітомоніторингу в теплиці

Номер патенту: 95283
Опубліковано: 25.12.2014
Автори: Лендєл Тарас Іванович, Лисенко Віталій Пилипович, Чернов Ігор Ігорович, Болбот Ігор Михайлович
МПК: A01G 3/00, A01B 51/00, A01D 45/00, A01G 25/00
Мітки: мобільній, електротехнічний, фітомоніторінгу, комплекс, самохідний, теплиці
Формула / Реферат:
Мобільний самохідний електротехнічний комплекс фітомоніторингу в теплиці, що містить раму, на якій змонтована ходова частина і механізм фіксації візка відрізняється тим, що додатково має поворотну башту, відеокамеру, висувні механізми, елементи вимірювання фітометричних і фітокліматичних параметрів, блок керування та пару подвійних коліс, при чому - передні зовнішні з діаметром - 19 см, внутрішні - 8 см, задні внутрішні - 8 см, задні опорні...
Радіолокаційний пристрій моніторингу ближньої зони
Номер патенту: 67326
Опубліковано: 10.02.2012
Автори: Шульгач Олег Володимирович, Хитровський Валентин Антонович
МПК: G01S 13/02
Мітки: пристрій, ближньої, моніторингу, радіолокаційний, зони
Формула / Реферат:
1. Радіолокаційний пристрій моніторингу ближньої зони, що містить пристрій обробки й індикації та приймач-передавач, при цьому до складу пристрою обробки й індикації входять синхронізатор, генератор кодів, джерело видачі звукової інформації, пороговий блок і вихідний блок, до складу приймача-передавача входять зв'язані між собою багатоканальним зворотним зв'язком передавальний пристрій, приймальний пристрій, блок формування гетеродинних...
Радіоприймач сигналів всенаправленого маяка фазової системи ближньої навігації
Номер патенту: 98730
Опубліковано: 12.05.2015
Автори: Кондрашов Віктор Іванович, Фіалкіна Тетяна Станіславівна, Осіпчук Аліна Олександрівна, Кондрашов Ярослав Вікторович
Мітки: навігації, фазової, маяка, сигналів, радіоприймач, ближньої, всенаправленого, системі
Формула / Реферат:
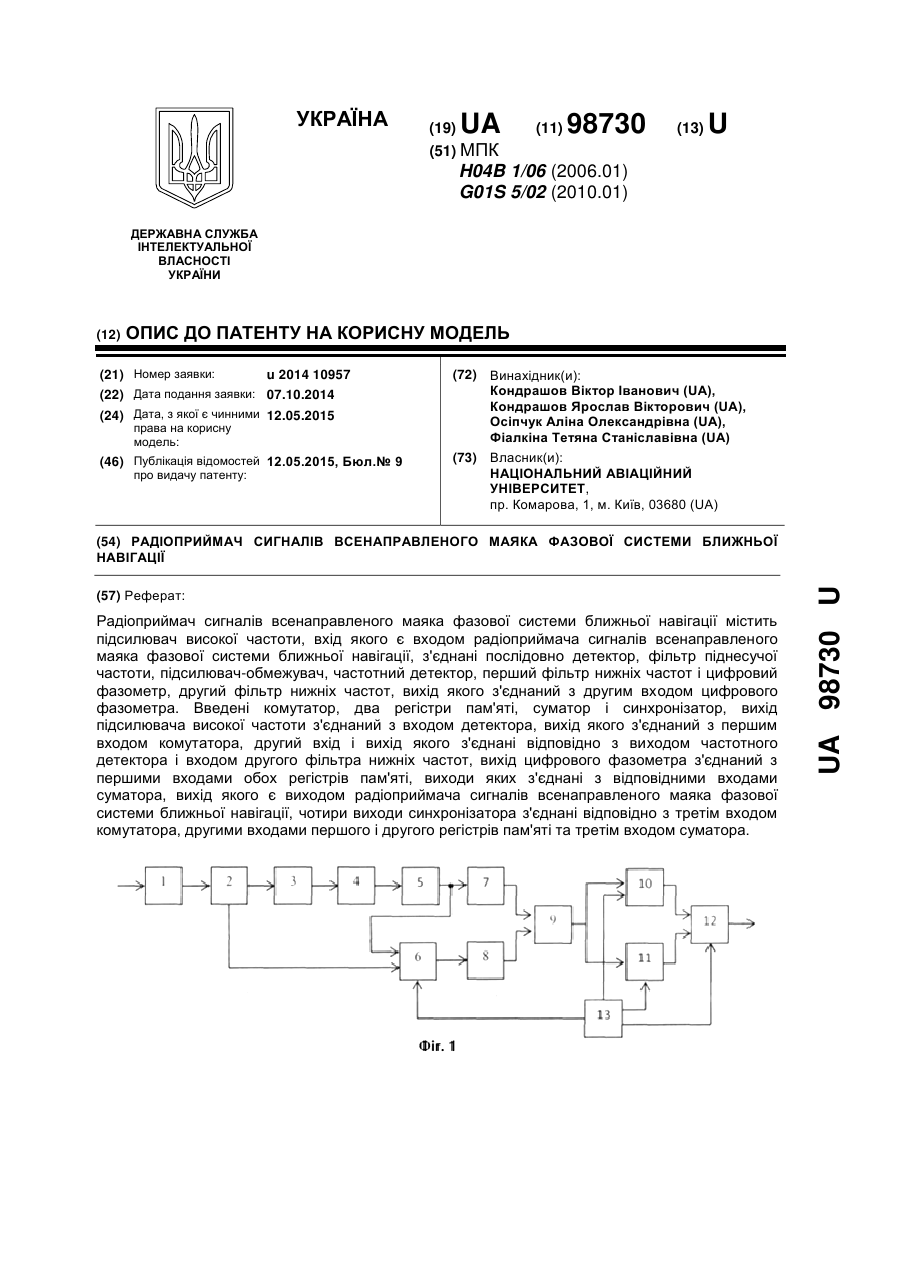
Радіоприймач сигналів всенаправленого маяка фазової системи ближньої навігації, що містить підсилювач високої частоти, вхід якого є входом радіоприймача сигналів всенаправленого маяка фазової системи ближньої навігації, з'єднані послідовно детектор, фільтр піднесучої частоти, підсилювач-обмежувач, частотний детектор, перший фільтр нижніх частот і цифровий фазометр, другий фільтр нижніх частот, вихід якого з'єднаний з другим входом цифрового...
Попередній патент: Пристрій для навивання гвинтових ущільнюючих і стопорних елементів механізмів
Наступний патент: Спосіб оцінки стану ендотелію печеристої тканини статевого члена
Випадковий патент: Спосіб очистки плавильно-формувального обладнання від полікапроаміда