Зенітний ракетний гарматний комплекс ближньої дії
Номер патенту: 98874
Опубліковано: 12.05.2015
Автори: Слободенюк Сергій Йосипович, Волошин Олег Олексійович, Завадський Дмитро Станіславович, Маланчук Андрій Миколайович, Семенюк Римма Петрівна, Білобородов Олег Олександрович, Головін Олексій Олександрович, Козлов Вадим Геннадійович, Бунаков Вадим Петрович, Куровська Тетяна Юріївна, Степаненко Юрий Константинович
Формула / Реферат
1. Зенітний ракетний гарматний комплекс ближньої дії, що містить бойову машину з розташованою на ній баштовою установку з двома двоствольними 30-мм автоматичними гарматами і вісьмома пусковими установками з зенітними керованими ракетами, при цьому на баштовій установці розташовано засоби виявлення повітряних цілей - радіолокаційну систему та прицільно-оптичне обладнання, який відрізняється тим, що до складу зенітного ракетного гарматного комплексу додатково введено пристрій для підняття засобів виявлення повітряних цілей на висоту з платформою для їх розміщення, при цьому платформу встановлено на зазначеному пристрої для підняття засобів виявлення повітряних цілей на висоту з можливістю обертанні її за азимутом по горизонту відносно точки кріплення на вільному кінці зазначеного пристрою на кут 360°.
2. Зенітний ракетний гарматний комплекс за п. 1, який відрізняється тим, що пристрій для підняття засобів виявлення повітряних цілей на висоту виконано телескопічним з підняттям платформи із розміщеними на ній засобами виявлення повітряних цілей на висоту не менше 5 метрів відносно башти комплексу.
3. Зенітний ракетний гарматний комплекс за п. 1, який відрізняється тим, що пристрій для підняття засобів виявлення повітряних цілей на висоту виконано розсувним з підняттям платформи із розміщеними на ній засобами виявлення повітряних цілей на висоту не менше 5 метрів відносно башти комплексу.
Текст
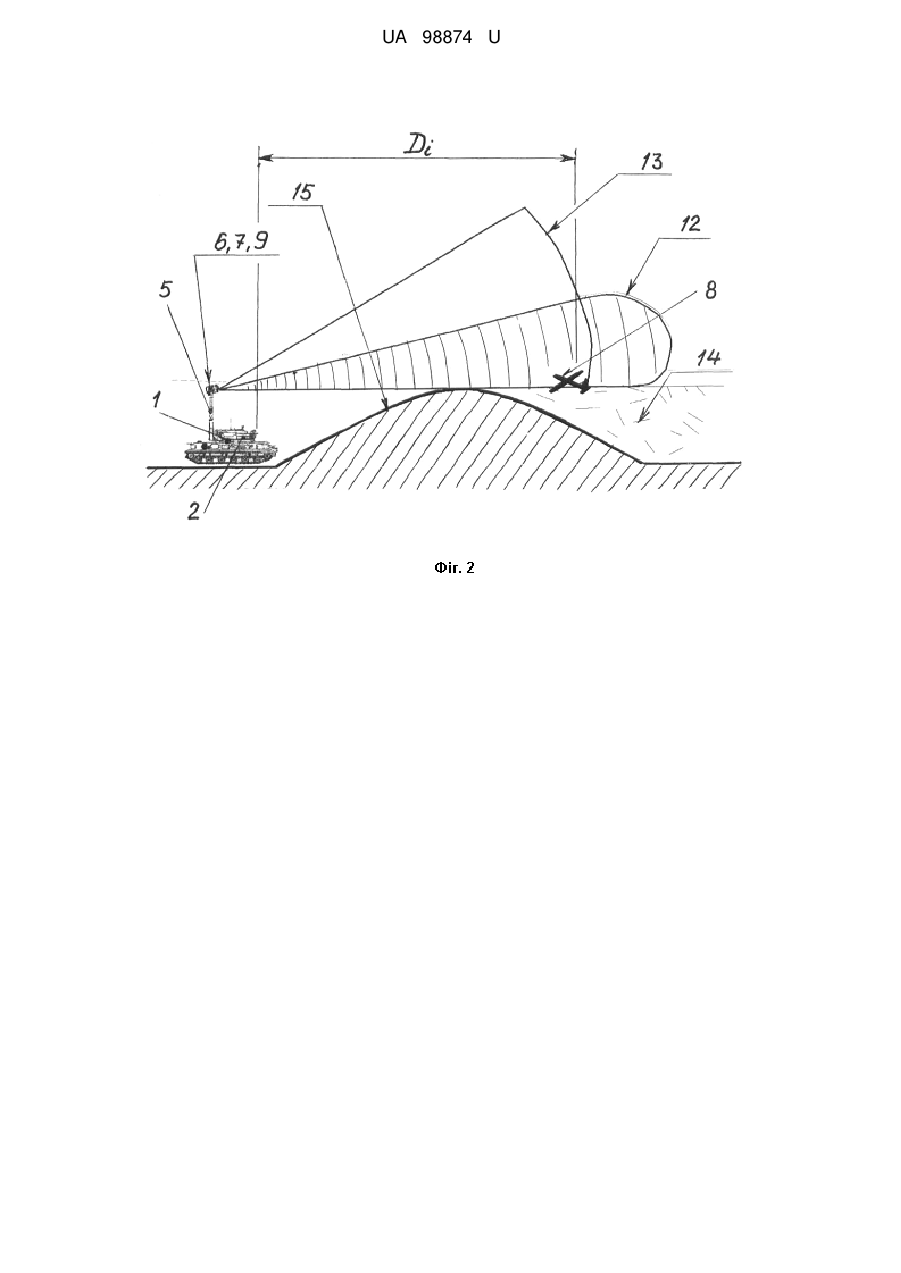
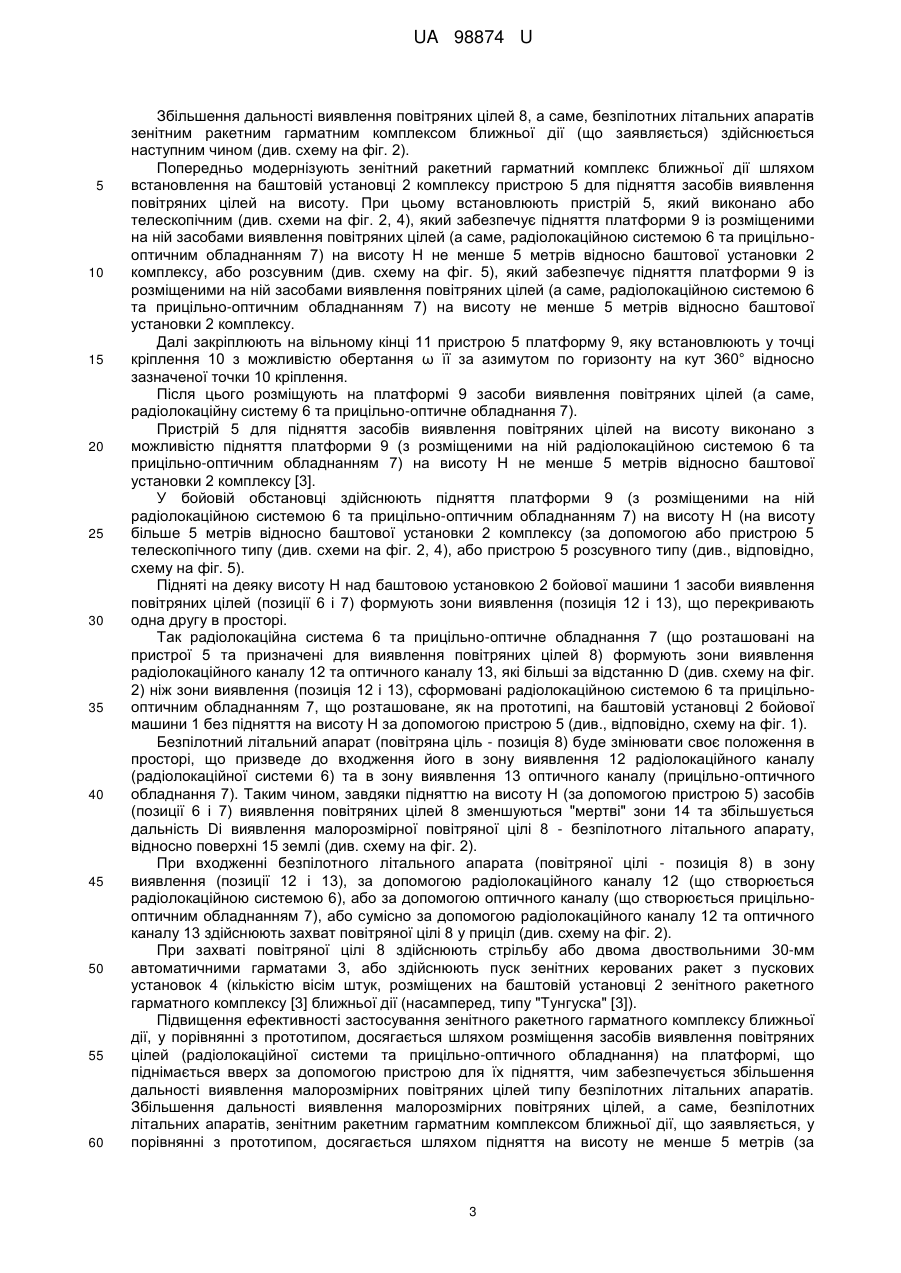
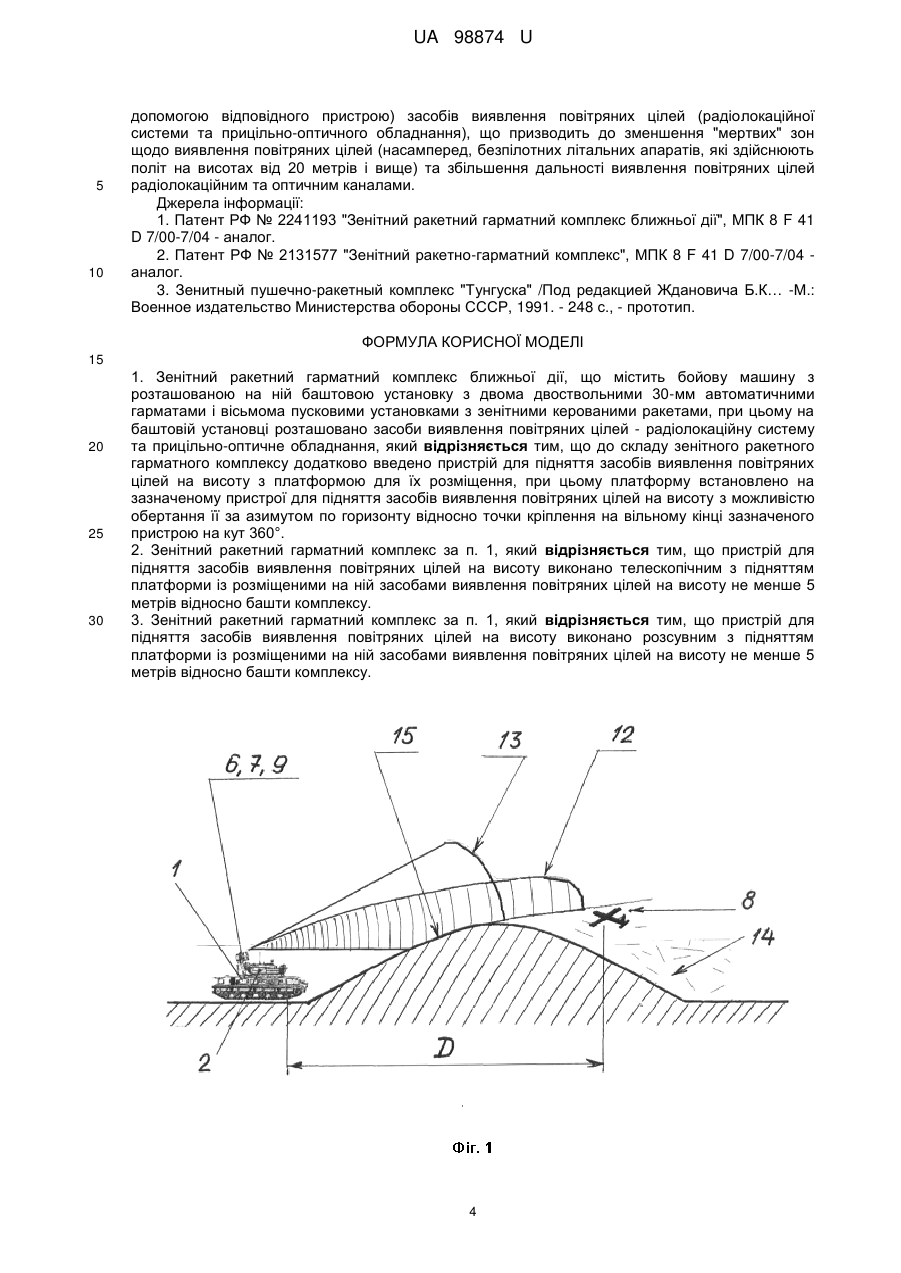
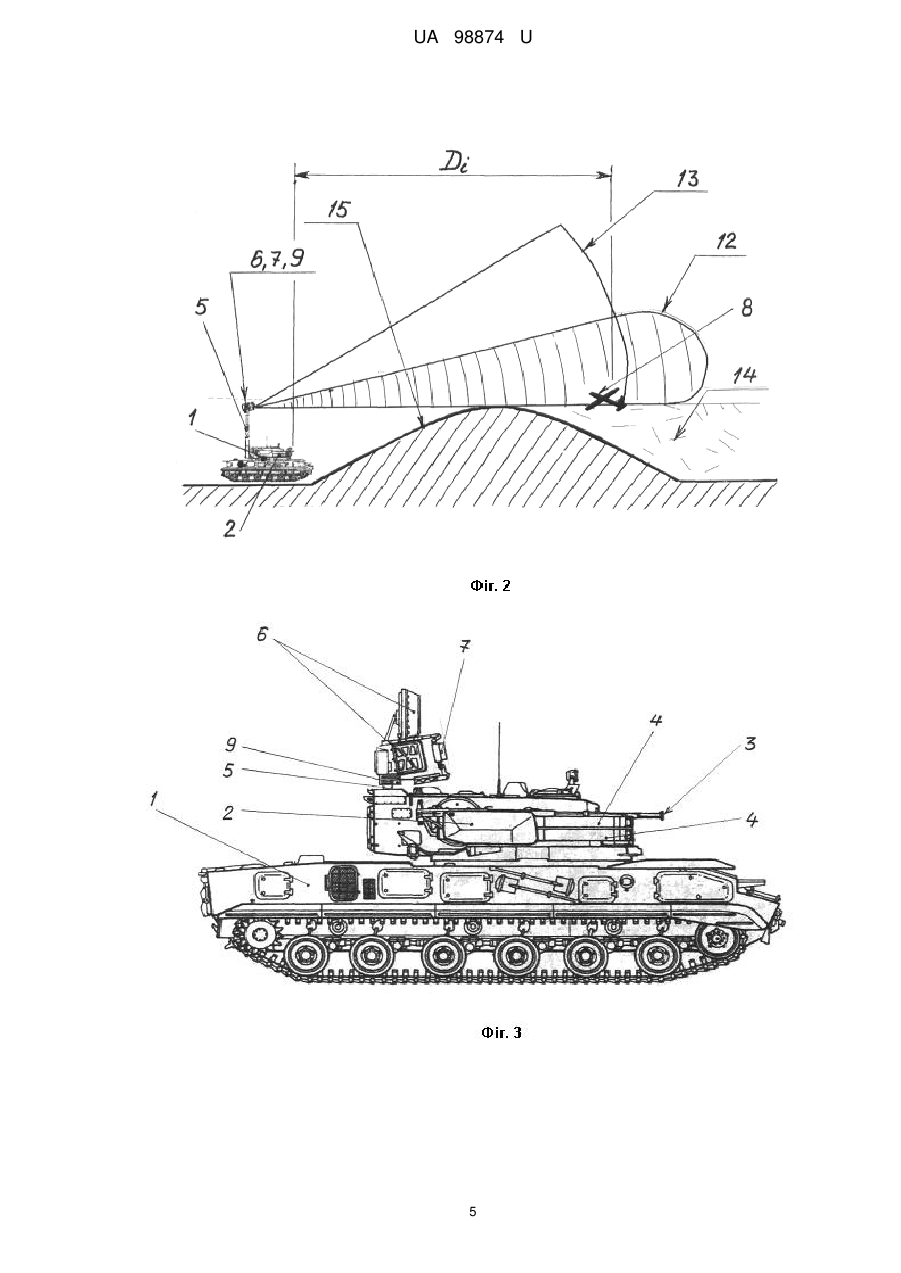
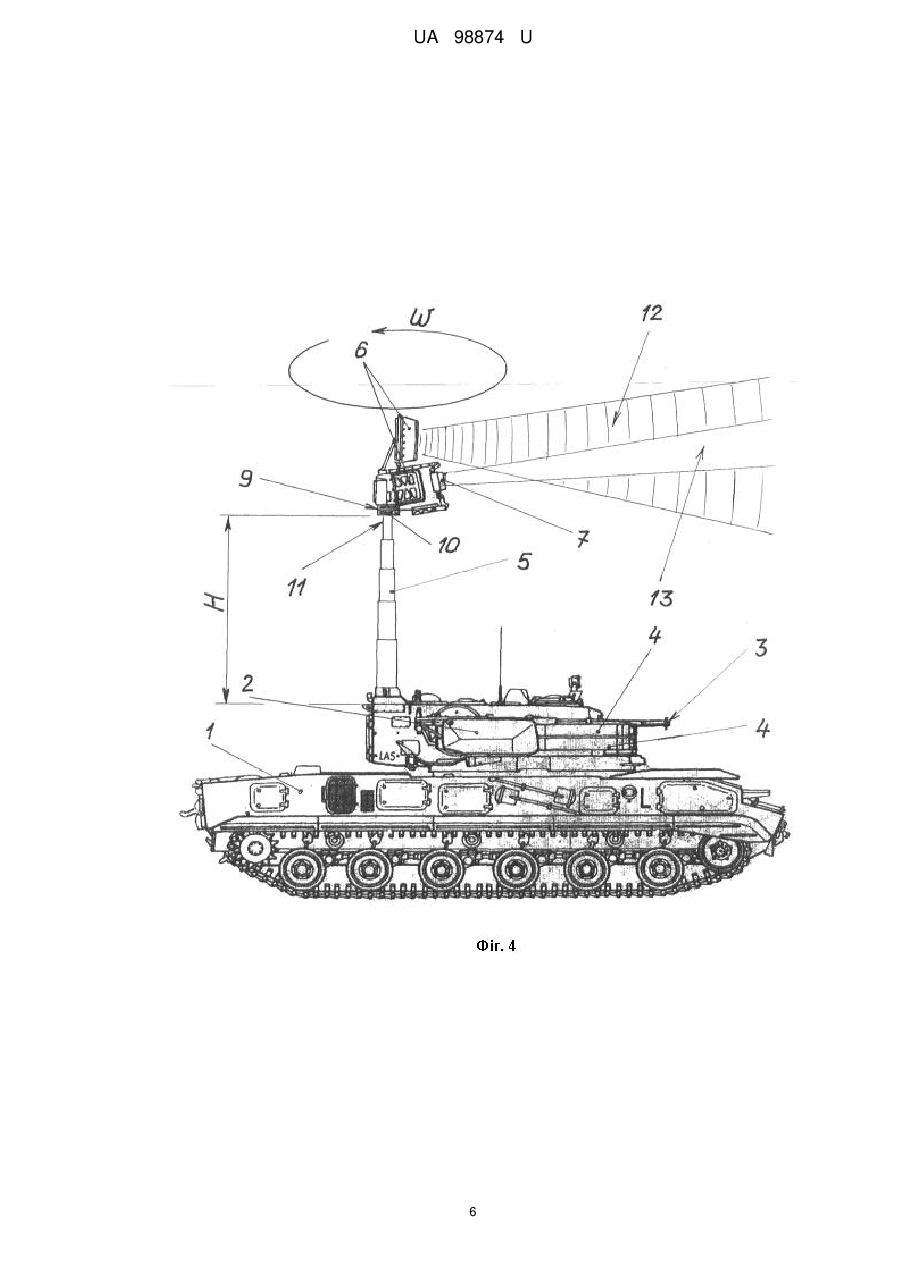
Реферат: Зенітний ракетний гарматний комплекс ближньої дії, містить бойову машину з розташованою на ній баштовою установку з двома двоствольними 30-мм автоматичними гарматами і вісьмома пусковими установками з зенітними керованими ракетами, при цьому на баштовій установці розташовано засоби виявлення повітряних цілей - радіолокаційну систему та прицільнооптичне обладнання. До складу зенітного ракетного гарматного комплексу додатково введено пристрій для підняття засобів виявлення повітряних цілей на висоту з платформою для їх розміщення, при цьому платформу встановлено на зазначеному пристрої для підняття засобів виявлення повітряних цілей на висоту з можливістю обертанні її за азимутом по горизонту відносно точки кріплення на вільному кінці зазначеного пристрою на кут 360°. UA 98874 U (12) UA 98874 U UA 98874 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі озброєння та військової техніки, зокрема, до військової техніки, а саме, до зенітних ракетних гарматних комплексів ближньої дії і може бути застосовано для знищення малорозмірних повітряних цілей типу безпілотних літальних апаратів на дальності, що перевищує дальність прямої видимості. Відомий зенітний ракетний гарматний комплекс ближньої дії, що містить установлену на носії обертову башту, розміщену на башті пускову установку з ракетами, засоби наведення пускової установки на ціль, пасивну інфрачервону станцію, цифровий обчислювач, блок виділення координат і пульт керування, при цьому ракети постачені головками самонаведення, приймач інфрачервоної станції встановлений на пусковій установці і виконаний з можливістю кругового огляду та з'єднаний із блоком виділення координат, вихід якого з'єднаний із входом цифрового обчислювача, виходи якого з'єднані з апаратурою запуску ракет і засобами наведення пускової установки на ціль, другий вхід цифрового обчислювача з'єднаний з пультом керування [1]. Недоліком відомого зенітного ракетного гарматного комплексу ближньої дії є незначна дальність виявлення малогабаритних повітряних цілей типу безпілотних літальних апаратів, що не відповідає тактичним вимогам. Відомий зенітний ракетно-гарматний комплекс, що включає в себе башту із приводом наведення й розміщеними на ній радіолокаційною станцією виявлення цілі, радіолокаційною станцією супроводу цілі та ракети, пусковими установками із зенітними керованими ракетами, зенітними автоматами й приводом наведення по куту місця, обчислювальною системою та оптико-електронною системою, при цьому до складу радіолокаційної станції супроводу цілі та ракети входять приводи наведення та блоки виділення координат цілі й ракети, до складу обчислювальної системи входять блок видачі цілевказівки по кутових координатах і дальності для декількох цілей, блок обчислення зонних параметрів, блок виробітку команд керування зенітними керованими ракетами, блок виробітку кутів одвороту пускових установок і башти, пульт пуску, другий блок обчислення зонних параметрів, другий блок виробітку команд керування зенітними керованими ракетами і логічний пристрій, до складу оптико-електронної системи входять тепловізійний прилад з телеавтоматом, інфрачервоний пеленгатор, антена з передавачем команд зенітним керованим ракетам і приводи наведення оптико-електронної системи по куту місця й азимуту з датчиками кутів [2]. До недоліків відомого зенітного ракетного гарматного комплексу відноситься те, що він має "мертві" зони виявлення повітряних цілей при розташуванні засобів виявлення повітряних цілей - радіолокаційного та оптичного, на башті транспортного засобу на висоті не більше 2,5 метрів відносно поверхні землі, що не відповідає тактичним вимогам. Найбільш близьким технічним рішенням, як за суттю, так і за задачею, що вирішується, яке вибрано за найближчий аналог (прототип), є зенітний ракетний гарматний комплекс ближньої дії, що містить бойову машину з розташованою на ній баштовою установкою з двома двоствольними 30-мм автоматичними гарматами і вісьмома пусковими установками з зенітними керованими ракетами, при цьому на баштовій установці розташовано засоби виявлення повітряних цілей - радіолокаційну систему та прицільно-оптичне обладнання [3]. До недоліків відомого зенітного ракетного гарматного комплексу ближньої дії, який вибрано за найближчий аналог (прототип), відноситься те, що він має "мертві" зони виявлення повітряних цілей при розташуванні засобів виявлення повітряних цілей - радіолокаційної системи та прицільно-оптичного обладнання, на башті комплексу на висоті не більше 2,5 метрів відносно поверхні землі), що не відповідає тактичним вимогам. В основу корисної моделі поставлено задачу шляхом встановлення засобів виявлення повітряних цілей - радіолокаційну систему та прицільно-оптичне обладнання на пристрої, що висувається вверх (при розміщенні зазначених пристроїв на платформі, закріпленій на вільному кінці висувного вверха пристрою - телескопічного чи розсувного), зменшити "мертві" зони виявлення повітряних цілей та збільшити дальність виявлення малорозмірних повітряних цілей - безпілотних літальних апаратів. Суть корисної моделі в зенітному ракетному гарматному комплексі ближньої дії, що містить бойову машину з розташованою на ній баштовою установкою з двома двоствольними 30-мм автоматичними гарматами і вісьмома пусковими установками з зенітними керованими ракетами, при цьому на баштовій установці розташовано засоби виявлення повітряних цілей радіолокаційну систему та прицільно-оптичне обладнання, полягає в тому, що до складу зенітного ракетного гарматного комплексу додатково введено пристрій для підняття засобів виявлення повітряних цілей на висоту з платформою для їх розміщення. Суть корисної моделі полягає і в тому, що платформу встановлено на зазначеному пристрої для підняття засобів виявлення повітряних цілей на висоту з можливістю обертання її за азимутом по горизонту 1 UA 98874 U 5 10 15 20 25 30 35 40 45 50 55 60 відносно точки кріплення на вільному кінці зазначеного пристрою на кут 360°. Суть корисної моделі полягає також і в тому, що пристрій для підняття засобів виявлення повітряних цілей на висоту виконано або телескопічним з підняттям платформи із розміщеними на ній засобами виявлення повітряних цілей на висоту не менше 5 метрів відносно баштової установки комплексу, або розсувним з підняттям платформи із розміщеними на ній засобами виявлення повітряних цілей на висоту не менше 5 метрів відносно баштової установки комплексу. Порівняння технічного рішення, що заявляється, із прототипом, дозволяє зробити висновок, що зенітний ракетний гарматний комплекс ближньої дії, що заявляється, відрізняється тим, що до його складу введено пристрій для підняття засобів виявлення повітряних цілей на висоту з платформою для їх розміщення, зазначену платформу встановлено на зазначеному пристрої для підняття засобів виявлення повітряних цілей на висоту з можливістю обертання її за азимутом по горизонту відносно точки кріплення на вільному кінці зазначеного пристрою на кут 360°, а пристрій для підняття засобів виявлення повітряних цілей на висоту виконано або телескопічним з підняттям платформи із розміщеними на ній засобами виявлення повітряних цілей на висоту не менше 5 метрів відносно баштової установки комплексу, або розсувним з підняттям платформи із розміщеними на ній засобами виявлення повітряних цілей на висоту не менше 5 метрів відносно баштової установки комплексу. Рішення технічної задачі у зенітному ракетному гарматному комплексі ближньої дії дійсно можливе тому, що завдяки підняттю засобів виявлення повітряних цілей (а саме, радіолокаційної системи та прицільно-оптичного обладнання) за допомогою відповідного пристрою на висоту не менше 5 метрів відносно баштової установки комплексу, зменшуються "мертві" зони виявлення малорозмірних повітряних цілей типу безпілотних літальних апаратів та збільшується дальність виявлення зазначених повітряних цілей. Суть корисної моделі пояснюється за допомогою креслень, де на фіг. 1 представлено зони виявлення, сформовані радіолокаційним та оптичним засобами виявлення повітряних цілей в кутомістній площині відомим зенітним ракетним гарматним комплексом ближньої дії, обраним за прототип, на фіг. 2 представлено зони виявлення, сформовані радіолокаційним та оптичним засобами виявлення повітряних цілей в кутомістній площині зенітним ракетним гарматним комплексом ближньої дії, що заявляється, із розташованими на пристрої для підняття засобів виявлення повітряних цілей на висоту зазначеними пристроями, на фіг. 3 показано конструктивно-компонувальну схему зенітного ракетного гарматного комплексу ближньої дії з убраним у транспортне положення пристроєм підняття на висоту засобів виявлення повітряних цілей, на фіг. 4 показано конструктивно-компонувальну схему зенітного ракетного гарматного комплексу ближньої дії при висуванні в робоче положення пристрою підняття на висоту засобів виявлення повітряних цілей, який виконано телескопічного типу, на фіг. 5 показано конструктивно-компонувальну схему зенітного ракетного гарматного комплексу ближньої дії при розкладанні в робоче положення пристрою підняття на висоту засобів виявлення повітряних цілей, який виконано розсувного типу. Зенітний ракетний гарматний комплекс ближньої дії (що заявляється) містить (як варіант конструктивного виконання) бойову машину 1 з розташованою на ній баштовою установкою 2 з двома двоствольними 30-мм автоматичними гарматами 3 і вісьмома пусковими установками 4 з зенітними керованими ракетами (на фіг. 1-5 - не показано). Конструктивно на баштовій установці 2 зенітного ракетного гарматного комплексу розміщено пристрій 5 для підняття засобів (позиції 6 і 7) виявлення повітряних цілей 8 на висоту з платформою 9 для їх розміщення (див. схеми на фіг. 1-5). Як засоби виявлення повітряних цілей 8 на платформі 9 розміщено радіолокаційну систему 6 та прицільно-оптичне обладнання 7 (див. схеми на фіг. 35). При цьому платформу 9 встановлено на зазначеному пристрої 5 для підняття засобів виявлення повітряних цілей на висоту Н з можливістю обертання ω її за азимутом по горизонту відносно точки 10 кріплення на вільному кінці 11 зазначеного пристрою 5 на кут 360°. Конструктивно пристрій 5 для підняття засобів виявлення повітряних цілей на висоту виконано або телескопічним (див. схеми на фіг. 2, 4) з підняттям платформи 9 із розміщеними на ній засобами виявлення повітряних цілей (а саме, радіолокаційною системою 6 та прицільнооптичним обладнанням 7) на висоту Н не менше 5 метрів відносно баштової установки 2 комплексу, або розсувним (див. схему на фіг. 5) з підняттям платформи 9 із розміщеними на ній засобами виявлення повітряних цілей (а саме, радіолокаційною системою 6 та прицільнооптичним обладнанням 7) на висоту не менше 5 метрів відносно баштової установки 2 комплексу. 2 UA 98874 U 5 10 15 20 25 30 35 40 45 50 55 60 Збільшення дальності виявлення повітряних цілей 8, а саме, безпілотних літальних апаратів зенітним ракетним гарматним комплексом ближньої дії (що заявляється) здійснюється наступним чином (див. схему на фіг. 2). Попередньо модернізують зенітний ракетний гарматний комплекс ближньої дії шляхом встановлення на баштовій установці 2 комплексу пристрою 5 для підняття засобів виявлення повітряних цілей на висоту. При цьому встановлюють пристрій 5, який виконано або телескопічним (див. схеми на фіг. 2, 4), який забезпечує підняття платформи 9 із розміщеними на ній засобами виявлення повітряних цілей (а саме, радіолокаційною системою 6 та прицільнооптичним обладнанням 7) на висоту Н не менше 5 метрів відносно баштової установки 2 комплексу, або розсувним (див. схему на фіг. 5), який забезпечує підняття платформи 9 із розміщеними на ній засобами виявлення повітряних цілей (а саме, радіолокаційною системою 6 та прицільно-оптичним обладнанням 7) на висоту не менше 5 метрів відносно баштової установки 2 комплексу. Далі закріплюють на вільному кінці 11 пристрою 5 платформу 9, яку встановлюють у точці кріплення 10 з можливістю обертання ω її за азимутом по горизонту на кут 360° відносно зазначеної точки 10 кріплення. Після цього розміщують на платформі 9 засоби виявлення повітряних цілей (а саме, радіолокаційну систему 6 та прицільно-оптичне обладнання 7). Пристрій 5 для підняття засобів виявлення повітряних цілей на висоту виконано з можливістю підняття платформи 9 (з розміщеними на ній радіолокаційною системою 6 та прицільно-оптичним обладнанням 7) на висоту Н не менше 5 метрів відносно баштової установки 2 комплексу [3]. У бойовій обстановці здійснюють підняття платформи 9 (з розміщеними на ній радіолокаційною системою 6 та прицільно-оптичним обладнанням 7) на висоту Н (на висоту більше 5 метрів відносно баштової установки 2 комплексу (за допомогою або пристрою 5 телескопічного типу (див. схеми на фіг. 2, 4), або пристрою 5 розсувного типу (див., відповідно, схему на фіг. 5). Підняті на деяку висоту Н над баштовою установкою 2 бойової машини 1 засоби виявлення повітряних цілей (позиції 6 і 7) формують зони виявлення (позиція 12 і 13), що перекривають одна другу в просторі. Так радіолокаційна система 6 та прицільно-оптичне обладнання 7 (що розташовані на пристрої 5 та призначені для виявлення повітряних цілей 8) формують зони виявлення радіолокаційного каналу 12 та оптичного каналу 13, які більші за відстанню D (див. схему на фіг. 2) ніж зони виявлення (позиція 12 і 13), сформовані радіолокаційною системою 6 та прицільнооптичним обладнанням 7, що розташоване, як на прототипі, на баштовій установці 2 бойової машини 1 без підняття на висоту Н за допомогою пристрою 5 (див., відповідно, схему на фіг. 1). Безпілотний літальний апарат (повітряна ціль - позиція 8) буде змінювати своє положення в просторі, що призведе до входження його в зону виявлення 12 радіолокаційного каналу (радіолокаційної системи 6) та в зону виявлення 13 оптичного каналу (прицільно-оптичного обладнання 7). Таким чином, завдяки підняттю на висоту Н (за допомогою пристрою 5) засобів (позиції 6 і 7) виявлення повітряних цілей 8 зменшуються "мертві" зони 14 та збільшується дальність Di виявлення малорозмірної повітряної цілі 8 - безпілотного літального апарату, відносно поверхні 15 землі (див. схему на фіг. 2). При входженні безпілотного літального апарата (повітряної цілі - позиція 8) в зону виявлення (позиції 12 і 13), за допомогою радіолокаційного каналу 12 (що створюється радіолокаційною системою 6), або за допомогою оптичного каналу (що створюється прицільнооптичним обладнанням 7), або сумісно за допомогою радіолокаційного каналу 12 та оптичного каналу 13 здійснюють захват повітряної цілі 8 у приціл (див. схему на фіг. 2). При захваті повітряної цілі 8 здійснюють стрільбу або двома двоствольними 30-мм автоматичними гарматами 3, або здійснюють пуск зенітних керованих ракет з пускових установок 4 (кількістю вісім штук, розміщених на баштовій установці 2 зенітного ракетного гарматного комплексу [3] ближньої дії (насамперед, типу "Тунгуска" [3]). Підвищення ефективності застосування зенітного ракетного гарматного комплексу ближньої дії, у порівнянні з прототипом, досягається шляхом розміщення засобів виявлення повітряних цілей (радіолокаційної системи та прицільно-оптичного обладнання) на платформі, що піднімається вверх за допомогою пристрою для їх підняття, чим забезпечується збільшення дальності виявлення малорозмірних повітряних цілей типу безпілотних літальних апаратів. Збільшення дальності виявлення малорозмірних повітряних цілей, а саме, безпілотних літальних апаратів, зенітним ракетним гарматним комплексом ближньої дії, що заявляється, у порівнянні з прототипом, досягається шляхом підняття на висоту не менше 5 метрів (за 3 UA 98874 U 5 10 допомогою відповідного пристрою) засобів виявлення повітряних цілей (радіолокаційної системи та прицільно-оптичного обладнання), що призводить до зменшення "мертвих" зон щодо виявлення повітряних цілей (насамперед, безпілотних літальних апаратів, які здійснюють політ на висотах від 20 метрів і вище) та збільшення дальності виявлення повітряних цілей радіолокаційним та оптичним каналами. Джерела інформації: 1. Патент РФ № 2241193 "Зенітний ракетний гарматний комплекс ближньої дії", МПК 8 F 41 D 7/00-7/04 - аналог. 2. Патент РФ № 2131577 "Зенітний ракетно-гарматний комплекс", МПК 8 F 41 D 7/00-7/04 аналог. 3. Зенитный пушечно-ракетный комплекс "Тунгуска" /Под редакцией Ждановича Б.К… -М.: Военное издательство Министерства обороны СССР, 1991. - 248 с., - прототип. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 1. Зенітний ракетний гарматний комплекс ближньої дії, що містить бойову машину з розташованою на ній баштовою установку з двома двоствольними 30-мм автоматичними гарматами і вісьмома пусковими установками з зенітними керованими ракетами, при цьому на баштовій установці розташовано засоби виявлення повітряних цілей - радіолокаційну систему та прицільно-оптичне обладнання, який відрізняється тим, що до складу зенітного ракетного гарматного комплексу додатково введено пристрій для підняття засобів виявлення повітряних цілей на висоту з платформою для їх розміщення, при цьому платформу встановлено на зазначеному пристрої для підняття засобів виявлення повітряних цілей на висоту з можливістю обертання її за азимутом по горизонту відносно точки кріплення на вільному кінці зазначеного пристрою на кут 360°. 2. Зенітний ракетний гарматний комплекс за п. 1, який відрізняється тим, що пристрій для підняття засобів виявлення повітряних цілей на висоту виконано телескопічним з підняттям платформи із розміщеними на ній засобами виявлення повітряних цілей на висоту не менше 5 метрів відносно башти комплексу. 3. Зенітний ракетний гарматний комплекс за п. 1, який відрізняється тим, що пристрій для підняття засобів виявлення повітряних цілей на висоту виконано розсувним з підняттям платформи із розміщеними на ній засобами виявлення повітряних цілей на висоту не менше 5 метрів відносно башти комплексу. 4 UA 98874 U 5 UA 98874 U 6 UA 98874 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул.Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Автори англійськоюHolovin Oleksii Oleksandrovych, Slobodeniuk Serhii Yosypovych, Semeniuk Rymma Petrivna, Kurovska Tetiana Yuriivna
Автори російськоюГоловин Алексей Александрович, Слободенюк Сергей Иосифович, Семенюк Римма Петровна, Куровская Татьяна Юрьевна
МПК / Мітки
МПК: F41F 1/00
Мітки: гарматний, зенітний, ближньої, дії, ракетний, комплекс
Код посилання
<a href="https://ua.patents.su/9-98874-zenitnijj-raketnijj-garmatnijj-kompleks-blizhno-di.html" target="_blank" rel="follow" title="База патентів України">Зенітний ракетний гарматний комплекс ближньої дії</a>
Переносний зенітний ракетний комплекс

Номер патенту: 63801
Опубліковано: 15.01.2004
Автори: Бузанов Віктор Іванович, Кузьмін Лев Васильович, Заболотний Іван Іванович, Шумов Сергій Олександрович, Молодик Анатолій Володимирович
Мітки: ракетний, комплекс, переносний, зенітний
Формула / Реферат:
1. Переносний зенітний ракетний комплекс, який включає керовану ракету з інфрачервоною головкою самонаведення з частотною модуляцією і з селектором, яка електрично і пневматично з'єднана з пусковим пристроєм, що включає в себе транспортно-пусковий контейнер, пусковий механізм і блок живлення, який відрізняється тим, що селектор інфрачервоної головки самонаведення виконаний з можливістю використання кінематичної ознаки відмінності цілі від...
Авіаційний ракетний комплекс

Номер патенту: 61851
Опубліковано: 25.07.2011
Автори: Горбенко Єлизавета Володимирівна, Козін Микола Степанович
МПК: B64G 3/00, B64C 39/04, B64C 39/02
Мітки: ракетний, авіаційний, комплекс
Формула / Реферат:
Авіаційний ракетний комплекс, що містить літак з двома фюзеляжами, між якими шарнірно встановлений з можливістю обертання навколо поперечної горизонтальної осі контейнер з ракетою-носієм, при цьому контейнер оснащений обтічником з дренажними щілинами, пристроями повороту, вузлами фіксації в заданому положенні, пристроями кріплення та виштовхування ракети-носія, а також кільця на ракеті-носії, системи транспортування, десантування,...
Авіаційний ракетний комплекс

Номер патенту: 48576
Опубліковано: 25.03.2010
Автори: Козін Микола Степанович, Козін Владислав Вадимович, Козін Юрій Миколайович, Козіна Поліна Юріївна
МПК: B64C 39/04, B64C 39/02, B64G 5/00
Мітки: ракетний, авіаційний, комплекс
Формула / Реферат:
Авіаційний ракетний комплекс, що містить літак, контейнер з ракетою-носієм, системи транспортування, десантування, гальмування горизонтального переміщення, орієнтації, стабілізації та керування стартом і польотом ракети-носія, який відрізняється тим, що літак виконаний з двома фюзеляжами, між якими шарнірно встановлений з можливістю обертання навколо поперечної горизонтальної осі контейнер з ракетою-носієм, при цьому контейнер оснащений...
Авіаційний ракетний комплекс

Номер патенту: 94187
Опубліковано: 11.04.2011
Автори: Козін Юрій Миколайович, Козіна Поліна Юріївна, Козін Владислав Вадимович, Козін Микола Степанович
МПК: B64C 39/04, B64C 39/00, B64C 39/02
Мітки: авіаційний, ракетний, комплекс
Формула / Реферат:
Авіаційний ракетний комплекс, що містить літак, контейнер з ракетою-носієм, системи транспортування, десантування, гальмування горизонтального переміщення, орієнтації, стабілізації та керування стартом і польотом ракети-носія, який відрізняється тим, що літак виконано з двома фюзеляжами, між якими шарнірно встановлено з можливістю обертання навколо поперечної горизонтальної осі контейнер з ракетою-носієм, при цьому контейнер оснащено...
Плавучий ракетний комплекс
Номер патенту: 38357
Опубліковано: 12.01.2009
Автори: Мокін Олександр Васильович, Матохін Олексій Володимирович, Мокін Андрій Олександрович, Іванов Анатолій Валентинович, Осиновий Генадій Генадійович, Борисов Євген Олексійович
Мітки: комплекс, ракетний, плавучий
Формула / Реферат:
1. Плавучий ракетний комплекс, що містить плавучий стартовий комплекс (ПСК), котрий включає змонтовані на верхній палубі корабля центральну залізничну колію для транспортера з ракетою і пускову установку, та корабель супроводження (КС), котрий включає змонтовані на верхній палубі корабля ангар з мостовими кранами і траверсами, центральну і тупикову залізничні колії для розміщення транспортерів з ракетами і апарель з вузлами кріплення з...
Попередній патент: Склад соусу-дресингу з рослинною добавкою
Наступний патент: Керований запірно-утримуючий пристрій
Випадковий патент: Пристрій для затримання спливаючих речовин