Автоматизована система збору інформації про параметри руху автомобіля та аналізу причин виникнення дорожньо-транспортної пригоди
Номер патенту: 101717
Опубліковано: 25.04.2013
Автори: Грінченко Олена Володимирівна, Лук'янова Ольга Олексіївна, Галевич Максим Миколайович, Дохов Олександр Іванович, Лук'янов Олександр Михайлович
Формула / Реферат
Автоматизована система збору інформації про параметри руху автомобіля та аналізу причин виникнення дорожньо-транспортної пригоди, що включає в себе: центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу багатофункціональної автомобільної бортової апаратури входять: GPS/GNSS-приймач, блок розподілу потоків даних, блок обчислення параметрів руху, блок контролю параметрів руху, блок формування критеріїв аналізу, приймальний пристрій, блок тимчасового зберігання інформації, блок керування, блок формування повідомлення про ДТП, передавальний пристрій, блок індикації факту порушення правил руху, запам'ятовуючий блок, блок додаткового контролю, блок індикації факту виникнення ДТП і блок електроживлення, яка відрізняється тим, що кожен переносний апаратно-програмний модуль додатково включає в себе GPS/GNSS-приймач, і при цьому кожен вихід центру збору і обробки інформації з'єднаний із входом одного з центрів поширення інформації, кожен центр поширення інформації передає дані багатофункціональній автомобільній бортовій апаратурі, у якій ці дані надходять на вхід приймального пристрою, вихід якого з'єднаний з першим входом блока формування критеріїв аналізу, другий вхід і перший вихід якого з'єднані з першими виходом і входом блока контролю параметрів руху, а вихід GPS/GNSS-приймача через блок розподілу потоків даних з'єднаний з першим входом блока тимчасового зберігання інформації і входом блока обчислення параметрів руху, перший вихід якого з'єднаний з другим входом блока контролю параметрів руху, а другий вихід блока обчислення параметрів руху з'єднаний з другим входом блока тимчасового зберігання інформації, першими входом і виходом блок керування з'єднаний відповідно з виходом і третім входом блока тимчасового зберігання інформації, другими виходом і входом блок керування з'єднаний відповідно із входом і виходом запам'ятовуючого блока, третіми виходом і входом блок керування з'єднаний з першими входом і виходом блока формування повідомлення про ДТП, четвертими виходом і входом блок керування з'єднаний з третім входом і другим виходом блока формування критеріїв аналізу, п'ятим входом блок керування з'єднаний з другим виходом блока контролю параметрів руху, п'ятим виходом блок керування з'єднаний із входом блока індикації факту порушення правил руху, другими виходом і входом блок формування повідомлення про ДТП з'єднаний із входом і виходом блока додаткового контролю, третій вихід блока формування повідомлення про ДТП з'єднаний із входом блока індикації факту виникнення ДТП, четвертий вихід блока формування повідомлення про ДТП з'єднаний із входом передавального пристрою, який передає інформацію у центр збору і обробки, а шостий вихід блока керування на час передачі даних з'єднується з входом пристрою для зчитування даних, що входить до складу переносного апаратно-програмного модуля, і при цьому блок електроживлення з'єднаний із входами живлення GPS/GNSS-приймача, блока розподілу потоків даних, блока обчислення параметрів руху, блока контролю параметрів руху, блока формування критеріїв аналізу, приймального пристрою, блока керування, блока формування повідомлення про ДТП, передавального пристрою, блока індикації факту порушення правил руху, блока додаткового контролю і блока індикації факту виникнення ДТП; а в переносному апаратно-програмному модулі дані від багатофункціональної автомобільної бортової апаратури надходять на вхід пристрою для зчитування даних, вихід якого з'єднаний із першим входом переносного комп'ютера, причому з другим входом переносного комп'ютера з'єднаний вихід GPS/GNSS-приймача, а вихід переносного комп'ютера з'єднаний із входом передавального пристрою, вихід якого на час передачі даних з'єднується з входом центру збору і обробки інформації, і при цьому блок електроживлення з'єднаний із входами живлення пристрою для зчитування даних, GPS/GNSS-приймача, переносного комп'ютера і передавального пристрою.
Текст
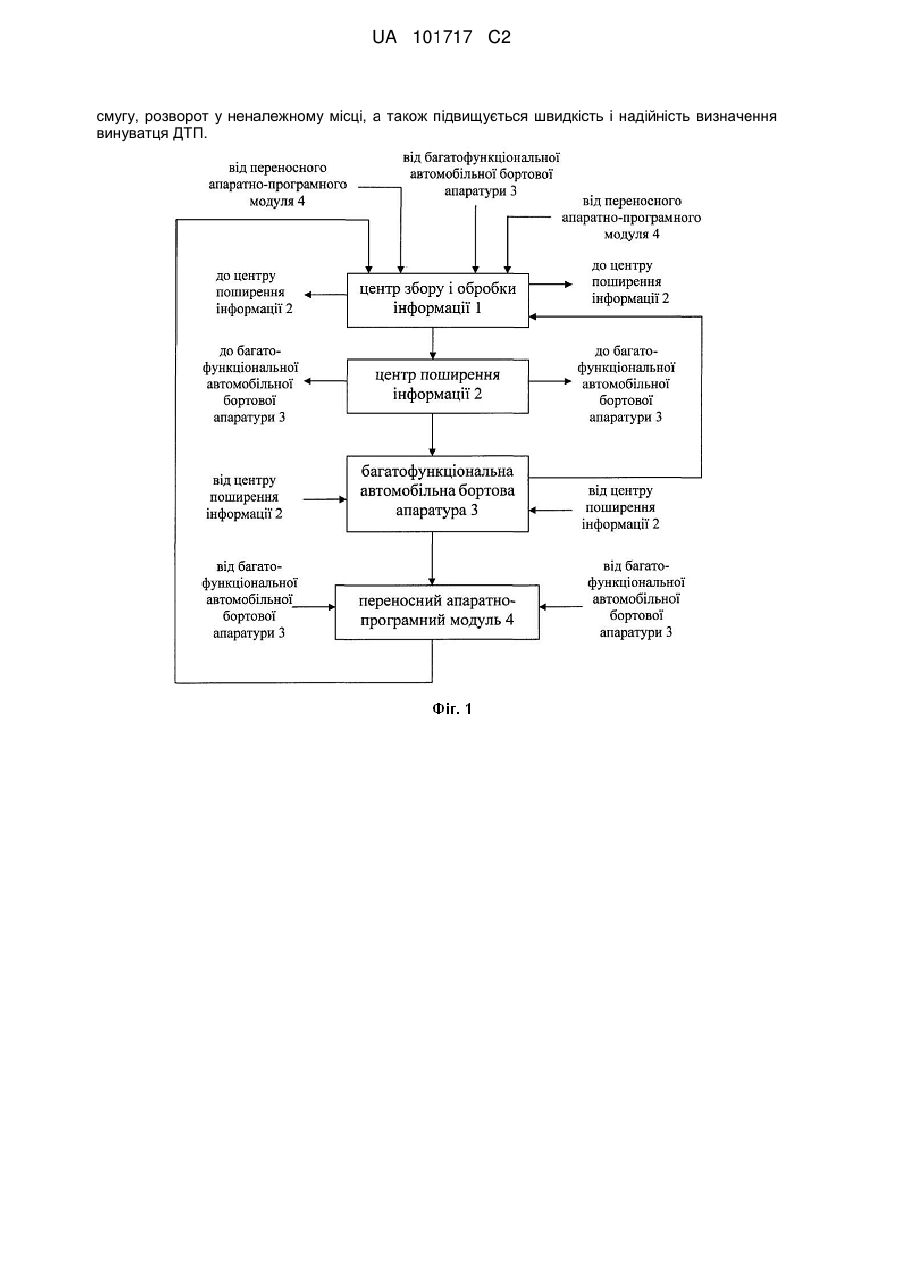
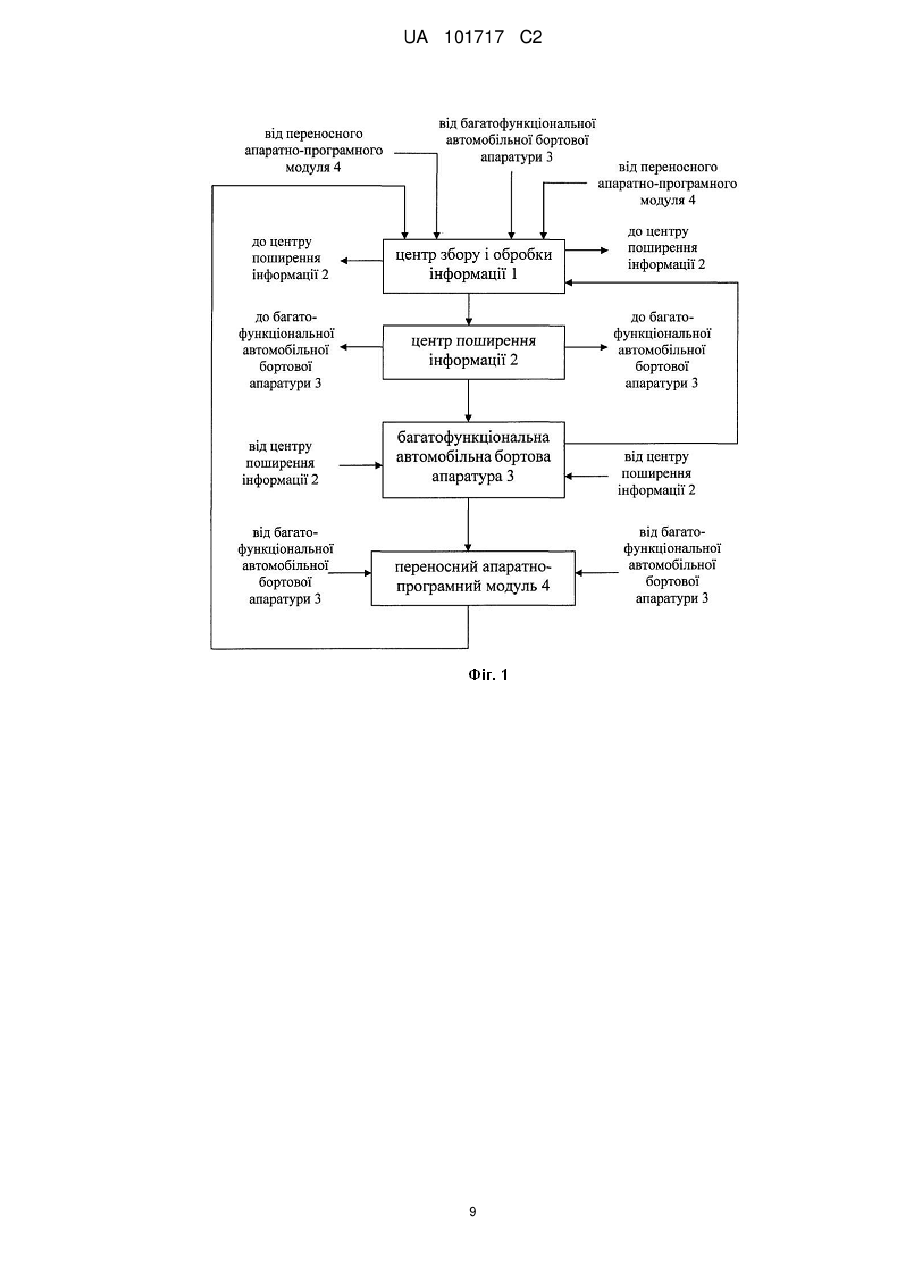
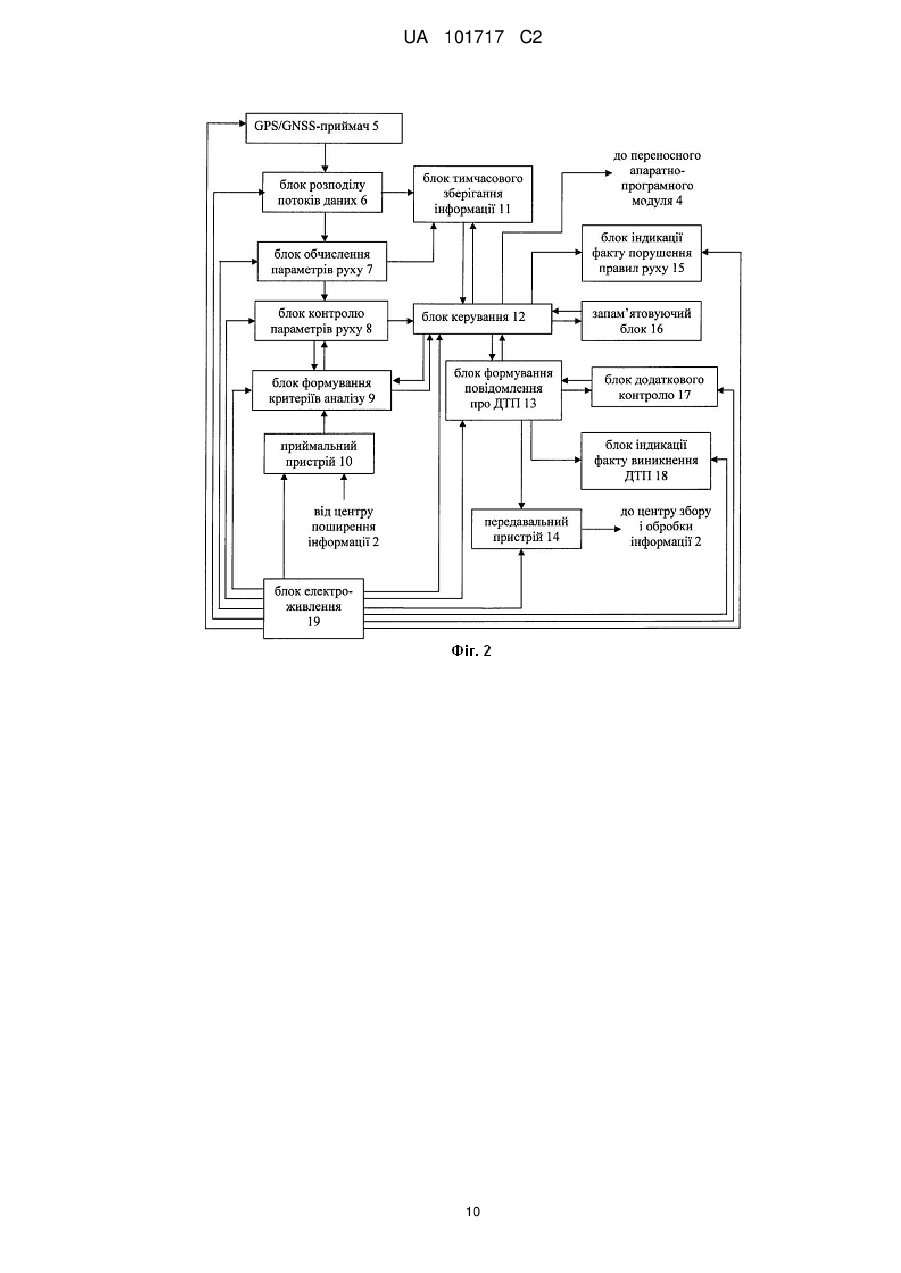
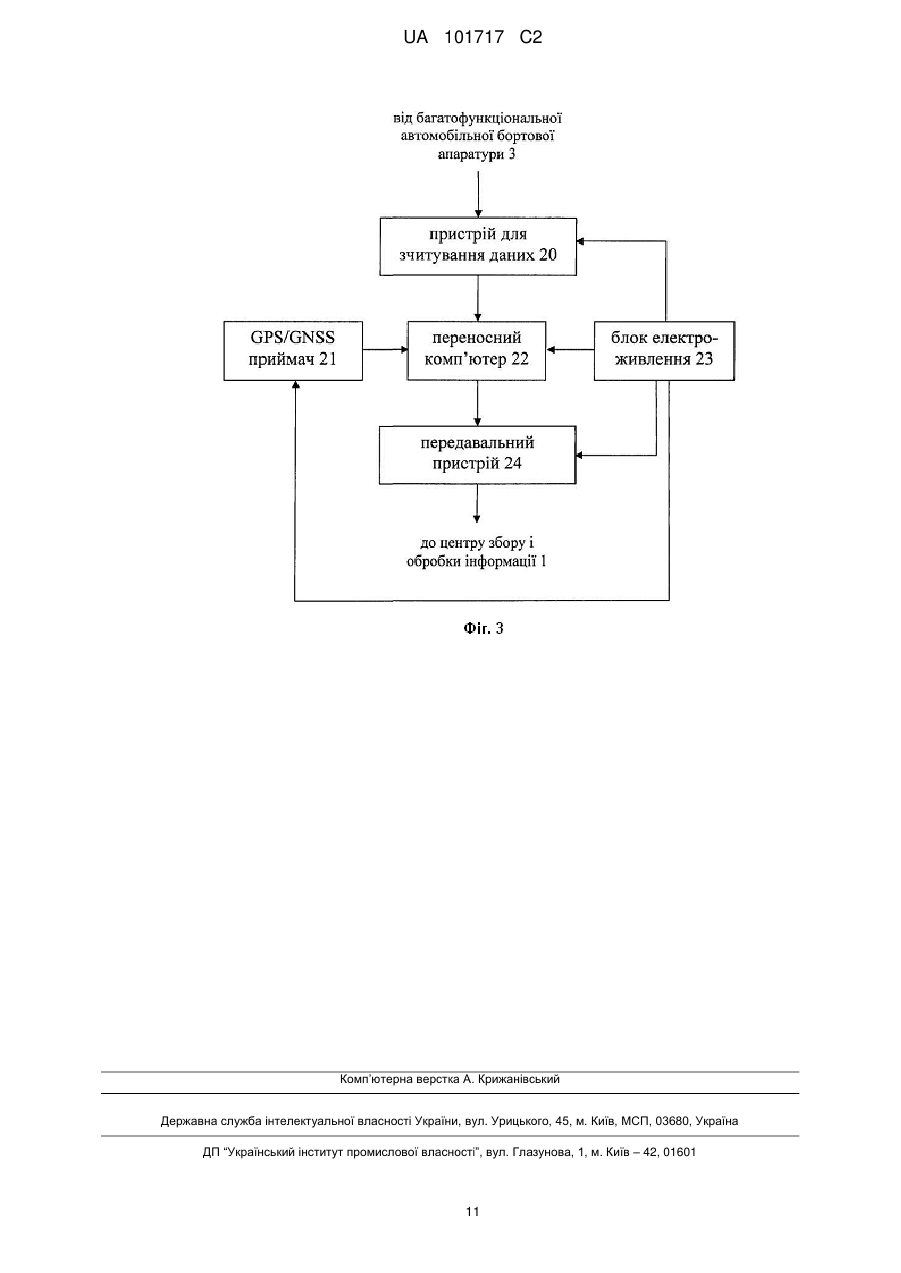
Реферат: Автоматизована система збору інформації про параметри руху автомобіля та аналізу причин виникнення дорожньо-транспортної пригоди належить до радіотехніки та може бути використана для підвищення безпеки руху автотранспорту. Система складається з багатофункціональної автомобільної апаратури, центру збору і обробки інформації, мережі центрів поширення інформації і переносних апаратно-програмних модулів. Всі ці елементи системи взаємодіють наступним чином. Формалізовані правила руху (обмеження для параметрів руху), що формуються і поширюються системою, надходять до багатофункціональної автомобільної апаратури. З ними порівнюються реальні значення параметрів руху автомобіля, обчислені за сигналами глобальних навігаційних супутникових систем, і, якщо результати аналізу даної інформації свідчать про порушення правил руху або про виникнення ДТП, то ці результати, разом з відповідними навігаційними вимірами, заносяться до бортового автомобільного запам'ятовуючого блока. Через переносний апаратнопрограмний модуль накопичена інформація потрапляє до центру збору і обробки інформації, де виконується її додаткова обробка з залученням вимірів найближчих базових станцій супутникової навігації та інших додаткових даних, в результаті якої остаточно визначається наявність чи відсутність порушення правил дорожнього руху у кожному конкретному випадку або виконується детальний аналіз обставин ДТП. Завдяки реалізації запропонованої системи забезпечується попередження та точність у виявленні таких допущених порушень правил дорожнього руху, як перевищення швидкості, порушення правил паркування, виїзд на зустрічну UA 101717 C2 (12) UA 101717 C2 смугу, розворот у неналежному місці, а також підвищується швидкість і надійність визначення винуватця ДТП. UA 101717 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до навігаційної техніки, та може бути використаний для підвищення безпеки руху автомобільного транспорту. Відомий пристрій для попередження водія автотранспорту про близькість аварійно небезпечного об'єкта [Патент України на винахід № 79446 МПК G08G 1/00, опублікований 25.06.2007, Бюлетень № 9]. Цей пристрій за сигналами супутникових навігаційних систем визначає координати автотранспортного засобу і, порівнявши їх з координатами аварійно небезпечних об'єктів, що зберігаються у базі даних, генерує сигнал попередження водія у разі наближення автомобіля до такого об'єкта. Цей пристрій має такі функціональні обмеження: 1) він не передбачає аналізу швидкості та інших параметрів руху автомобіля, що унеможливлює автоматичне визначення факту виникнення дорожньо-транспортної пригоди (ДТП) і ряду порушень правил руху (наприклад, перевищення швидкості); 2) він лише сповіщає про наближення автотранспортного засобу до того чи іншого об'єкта, але не аналізує дані про обмеження для параметрів руху, які існують на різних ділянках траєкторії автомобіля; 3) він не дозволяє накопичувати і зберігати вимірювальну навігаційну інформацію та результати її обробки і аналізу; 4) він не дає можливості проводити детальний аналіз зареєстрованої інформації і контролювати правильність сформованих попереджень. Відома також система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху [Патент України на винахід № 88999 МПК G01C 21/26, G08G 1/052, G08G 1/056, опублікований 10.12.2009, Бюлетень № 23]. У цій системі обмеження для параметрів руху, що визначаються правилами дорожнього руху і дорожніми знаками, передаються автомобільній багатофункціональній апаратурі, де з ними порівнюються реальні значення параметрів руху автомобіля, обчислені за сигналами глобальних навігаційних супутникових систем, і, якщо результати аналізу даної інформації свідчать про порушення правил руху, то ці результати, разом з відповідними навігаційними вимірами, заносяться до спеціалізованого автомобільного запам'ятовуючого блока. Потім ці дані передаються до центру збору і обробки інформації, де виконується їхня обробка з залученням додаткових даних, в результаті якої остаточно визначається наявність чи відсутність порушення правил дорожнього руху. Ця система має наступні функціональні обмеження. У ній не передбачене автоматизоване визначення моменту виникнення ДТП і не зберігаються ніякі дані про параметри руху автомобіля перед цим моментом, що унеможливлює проведення автоматизованого аналізу обставин виникнення ДТП. Найближчою за технічною суттю до пропонованого винаходу є система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди [Патент України на винахід № 91792 МПК G01C 21/26, G08G 1/052, G08G 1/056, опублікований 25.08.2010, Бюлетень № 16]. Ця система функціонує наступним чином. Обмеження для параметрів руху, що визначаються правилами дорожнього руху і дорожніми знаками, передаються багатофункціональній апаратурі, якою оснащений кожен автомобіль. З ними порівнюються реальні значення параметрів руху автомобіля, обчислені за сигналами глобальних навігаційних супутникових систем, і, якщо результати аналізу даної інформації свідчать про порушення правил руху або про виникнення ДТП, то ці результати, разом з відповідними навігаційними вимірами, заносяться до спеціалізованого автомобільного запам'ятовуючого блока. Коли працівники ДАІ аналізують ДТП або виконують чергову перевірку, ці дані передаються до центру збору і обробки інформації, де виконується їхня додаткова обробка з залученням вимірів найближчих базових станцій супутникової навігації, в результаті якої остаточно визначається наявність чи відсутність порушення правил дорожнього руху у кожному конкретному випадку або виконується детальний аналіз обставин ДТП. Система містить в собі центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу багатофункціональної автомобільної бортової апаратури входять: GPS/GNSS-приймач, блок розподілу потоків даних, блок обчислення параметрів руху, блок контролю параметрів руху, блок формування критеріїв аналізу, приймальний пристрій, блок тимчасового зберігання інформації, блок керування, блок формування повідомлення про ДТП, передавальний пристрій, блок індикації факту порушення правил руху, запам'ятовуючий блок, блок додаткового контролю, блок індикації факту виникнення ДТП і блок електроживлення. Причому кожен вихід центру збору і обробки інформації з'єднаний із входом одного з центрів 1 UA 101717 C2 5 10 15 20 25 30 35 40 45 50 55 60 поширення інформації, кожен центр поширення інформації передає дані багатофункціональній автомобільній бортовій апаратурі, у якій ці дані надходять на вхід приймального пристрою, вихід якого з'єднаний з першим входом блока формування критеріїв аналізу, другий вхід і перший вихід якого з'єднані з першими виходом і входом блока контролю параметрів руху, а вихід GPS/GNSS-приймача через блок розподілу потоків даних з'єднаний з першим входом блока тимчасового зберігання інформації і входом блока обчислення параметрів руху, перший вихід якого з'єднаний з другим входом блока контролю параметрів руху, а другий вихід блока обчислення параметрів руху з'єднаний з другим входом блока тимчасового зберігання інформації, першими входом і виходом блок керування з'єднаний з виходом і третім входом блока тимчасового зберігання інформації, другими виходом і входом блок керування з'єднаний із входом і виходом запам'ятовуючого блока, третіми виходом і входом блок керування з'єднаний з першими входом і виходом блока формування повідомлення про ДТП, четвертими виходом і входом блок керування з'єднаний з третім входом і другим виходом блока формування критеріїв аналізу, п'ятим входом блок керування з'єднаний з другим виходом блока контролю параметрів руху, п'ятим виходом блок керування з'єднаний із входом блока індикації факту порушення правил руху, другими виходом і входом блок формування повідомлення про ДТП з'єднаний із входом і виходом блока додаткового контролю, третій вихід блока формування повідомлення про ДТП з'єднаний із входом блока індикації факту виникнення ДТП, четвертий вихід блока формування повідомлення про ДТП з'єднаний із входом передавального пристрою, який передає інформацію у центр збору і обробки інформації, а шостий вихід блока керування на час передачі даних з'єднується з входом переносного апаратно-програмного модуля, вихід якого також на час передачі даних з'єднується з входом центру збору і обробки інформації, і при цьому блок електроживлення з'єднаний із входами живлення GPS/GNSS-приймача, блока розподілу потоків даних, блока обчислення параметрів руху, блока контролю параметрів руху, блока формування критеріїв аналізу, приймального пристрою, блока керування, блока формування повідомлення про ДТП, передавального пристрою, блока індикації факту порушення правил руху, блока додаткового контролю і блока індикації факту виникнення ДТП. Ця система має наступне функціональне обмеження. В результаті ДТП досить часто може бути пошкоджена зовнішня антена GPS/GNSS-приймача, розташована на корпусі автомобіля, або кабель, який пов'язує її з GPS/GNSS-приймачем, або можуть виникнути перешкоди, що заважають отриманню повноцінних навігаційних вимірів у обсязі, достатньому для вирішення навігаційної задачі. Тоді параметри руху, визначені виключно на основі вимірювальної інформації, накопиченої до моменту виникнення ДТП, можуть виявитися недостатньо точними для проведення детального аналізу обставин ДТП. Технічною задачею винаходу є розширення функціональних можливостей системи шляхом доповнення переносного апаратно-програмного модуля GPS/GNSS-приймачем і використання навігаційної вимірювальної інформації цього GPS/GNSS-приймача в ході оброблення даних. Ця задача вирішена наступним чином. В автоматизованій системі збору інформації про параметри руху автомобіля та аналізу причин виникнення дорожньо-транспортної пригоди, що включає в себе собі центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу багатофункціональної автомобільної бортової апаратури входять: GPS/GNSS-приймач, блок розподілу потоків даних, блок обчислення параметрів руху, блок контролю параметрів руху, блок формування критеріїв аналізу, приймальний пристрій, блок тимчасового зберігання інформації, блок керування, блок формування повідомлення про ДТП, передавальний пристрій, блок індикації факту порушення правил руху, запам'ятовуючий блок, блок додаткового контролю, блок індикації факту виникнення ДТП і блок електроживлення, згідно винаходу, кожен переносний апаратно-програмний модуль додатково включає в себе GPS/GNSS-приймач, і при цьому кожен вихід центру збору і обробки інформації з'єднаний із входом одного з центрів поширення інформації, кожен центр поширення інформації передає дані багатофункціональній автомобільній бортовій апаратурі, у якій ці дані надходять на вхід приймального пристрою, вихід якого з'єднаний з першим входом блока формування критеріїв аналізу, другий вхід і перший вихід якого з'єднані з першими виходом і входом блока контролю параметрів руху, а вихід GPS/GNSS-приймача через блок розподілу потоків даних з'єднаний з першим входом блока тимчасового зберігання інформації і входом блока обчислення параметрів руху, перший вихід якого з'єднаний з другим входом блока контролю параметрів руху, а другий вихід блока обчислення параметрів руху з'єднаний з другим входом блока тимчасового зберігання інформації, першими входом і виходом блок керування з'єднаний з виходом і третім входом блока тимчасового зберігання інформації, другими виходом і входом блок керування з'єднаний із входом і виходом запам'ятовуючого блока, третіми виходом і 2 UA 101717 C2 5 10 15 20 25 30 35 40 45 50 55 60 входом блок керування з'єднаний з першими входом і виходом блока формування повідомлення про ДТП, четвертими виходом і входом блок керування з'єднаний з третім входом і другим виходом блока формування критеріїв аналізу, п'ятим входом блок керування з'єднаний з другим виходом блока контролю параметрів руху, п'ятим виходом блок керування з'єднаний із входом блока індикації факту порушення правил руху, другими виходом і входом блок формування повідомлення про ДТП з'єднаний із входом і виходом блока додаткового контролю, третій вихід блока формування повідомлення про ДТП з'єднаний із входом блока індикації факту виникнення ДТП, четвертий вихід блока формування повідомлення про ДТП з'єднаний із входом передавального пристрою, який передає інформацію у центр збору і обробки, а шостий вихід блока керування на час передачі даних з'єднується з входом пристрою для зчитування даних, що входить до складу переносного апаратно-програмного модуля, і при цьому блок електроживлення з'єднаний із входами живлення GPS/GNSS-приймача, блока розподілу потоків даних, блока обчислення параметрів руху, блока контролю параметрів руху, блока формування критеріїв аналізу, приймального пристрою, блока керування, блока формування повідомлення про ДТП, передавального пристрою, блока індикації факту порушення правил руху, блока додаткового контролю і блока індикації факту виникнення ДТП; а в переносному апаратнопрограмному модулі дані від багатофункціональної автомобільної бортової апаратури надходять на вхід пристрою для зчитування даних, вихід якого з'єднаний із першим входом переносного комп'ютера, причому з другим входом переносного комп'ютера з'єднаний вихід GPS/GNSS-приймача, а вихід переносного комп'ютера з'єднаний із входом передавального пристрою, вихід якого на час передачі даних з'єднується з входом центру збору і обробки інформації, і при цьому блок електроживлення з'єднаний із входами живлення пристрою для зчитування даних, GPS/GNSS-приймача, переносного комп'ютера і передавального пристрою. На фіг. 1 зображено загальну схему запропонованої системи. На фіг. 2 зображено схему багатофункціональної автомобільної бортової апаратури, яка є складовою частиною запропонованої системи. На фіг. 3 зображено схему переносного апаратно-програмного модуля, який є складовою частиною запропонованої системи. Автоматизована система збору інформації про параметри руху автомобіля та аналізу причин виникнення дорожньо-транспортної пригоди містить в собі центр збору і обробки інформації 1, центри поширення інформації 2, багатофункціональну автомобільну бортову апаратуру 3 і переносні апаратно-програмні модулі 4, причому до складу багатофункціональної автомобільної бортової апаратури 3 входять: GPS/GNSS-приймач 5, блок розподілу потоків даних 6, блок обчислення параметрів руху 7, блок контролю параметрів руху 8, блок формування критеріїв аналізу 9, приймальний пристрій 10, блок тимчасового зберігання інформації 11, блок керування 12, блок формування повідомлення про ДТП 13, передавальний пристрій 14, блок індикації факту порушення правил руху 15, запам'ятовуючий блок 16, блок додаткового контролю 17, блок індикації факту виникнення ДТП 18 і блок електроживлення 19, а до складу кожного переносного апаратно-програмного модуля 4 входять: пристрій для зчитування даних 20, GPS/GNSS-приймач 21, переносний комп'ютер 22, блок електроживлення 23 і передавальний пристрій 24. При цьому кожен вихід центру збору і обробки інформації 1 з'єднаний із входом одного з центрів поширення інформації 2, кожен центр поширення інформації 2 передає дані багатофункціональній автомобільній бортовій апаратурі 3, у якій ці дані надходять на вхід приймального пристрою 10, вихід якого з'єднаний з першим входом блока формування критеріїв аналізу 9, другий вхід і перший вихід якого з'єднані з першими виходом і входом блока контролю параметрів руху 8, а вихід GPS/GNSS-приймача 5 через блок розподілу потоків даних 6 з'єднаний з першим входом блока тимчасового зберігання інформації 11 і входом блока обчислення параметрів руху 7, перший вихід якого з'єднаний з другим входом блока контролю параметрів руху 8, а другий вихід блока обчислення параметрів руху 7 з'єднаний з другим входом блока тимчасового зберігання інформації 11, першими входом і виходом блок керування 12 з'єднаний з виходом і третім входом блока тимчасового зберігання інформації 11, другими виходом і входом блок керування 12 з'єднаний із входом і виходом запам'ятовуючого блока 16, третіми виходом і входом блок керування 12 з'єднаний з першими входом і виходом блока формування повідомлення про ДТП 13, четвертими виходом і входом блок керування 12 з'єднаний з третім входом і другим виходом блока формування критеріїв аналізу 9, п'ятим входом блок керування 12 з'єднаний з другим виходом блока контролю параметрів руху 8, п'ятим виходом блок керування 12 з'єднаний із входом блока індикації факту порушення правил руху 15, другими виходом і входом блок формування повідомлення про ДТП 13 з'єднаний із входом і виходом блока додаткового контролю 17, третій вихід блока формування повідомлення про ДТП 13 з'єднаний із входом блока індикації факту виникнення 3 UA 101717 C2 5 10 15 20 25 30 35 40 45 50 55 60 ДТП 18, четвертий вихід блока формування повідомлення про ДТП 13 з'єднаний із входом передавального пристрою 14, який передає інформацію у центр збору і обробки інформації 1, а шостий вихід блока керування 12 на час передачі даних з'єднується з входом пристрою для зчитування даних 20, що входить до складу переносного апаратно-програмного модуля 4, і при цьому блок електроживлення 19 з'єднаний із входами живлення GPS/GNSS-приймача 5, блока розподілу потоків даних 6, блока обчислення параметрів руху 7, блока контролю параметрів руху 8, блока формування критеріїв аналізу 9, приймального пристрою 10, блока керування 12, блока формування повідомлення про ДТП 13, передавального пристрою 14, блока індикації факту порушення правил руху 15, блока додаткового контролю 17 і блока індикації факту виникнення ДТП 18; а в переносному апаратно-програмному модулі 4 дані від багатофункціональної автомобільної бортової апаратури 3 надходять на вхід пристрою для зчитування даних 20, вихід якого з'єднаний із першим входом переносного комп'ютера 22, причому з другим входом переносного комп'ютера 22 з'єднаний вихід GPS/GNSS-приймача 21, а вихід переносного комп'ютера 22 з'єднаний із входом передавального пристрою 24, вихід якого на час передачі даних з'єднується з входом центру збору і обробки інформації 1, і при цьому блок електроживлення 23 з'єднаний із входами живлення пристрою для зчитування даних 20, GPS/GNSS-приймача 21, переносного комп'ютера 22 і передавального пристрою 24. Система працює таким чином. У центрі збору і обробки інформації 1 зберігається база даних, що містить інформацію про діапазони координат, в межах яких діють обмеження (заборона паркування, обмеження швидкості або напрямків руху тощо), що визначаються розміщеними на вулицях даного населеного пункту дорожніми знаками. Сформовані на основі цієї інформації пакети даних, що містять формалізовані для подальшого використання правила руху, передаються за допомогою провідного зв'язку в центри поширення інформації 2. При цьому пакет даних, що надходить до центру поширення інформації 2, містить правила руху лише на тих ділянках вулиць, які розташовані в межах зони, прилеглої до цього центру і закріпленої за ним. Кожен з центрів поширення інформації 2 безперервно транслює ці дані, а також інформацію про час їх формування і про межі даної зони для усіх автотранспортних засобів, що перебувають на території цієї зони і прилеглих до неї зон і оснащені багатофункціональною автомобільною бортовою апаратурою 3. Для цього може використовуватися будь-який радіозв'язок (ультракороткохвильовий, GSM/GPRS або Wi-Fi зв'язок). Розділення на зони забезпечує зменшення об'єму даних, що передаються користувачам, а значить, прискорення передачі інформації та її обробки за допомогою багатофункціональної автомобільної бортової апаратури з кожного транспортного засобу. У багатофункціональній автомобільній бортовій апаратурі 3 GPS/GNSS-приймач 5 постійно, через кожний інтервал часу ∆t1, на основі сигналів навігаційних супутникових систем формує вимірювальну інформацію, що служить вихідними даними для визначення параметрів руху автомобіля. Вимірювальна інформація надходить до блока розподілу потоків даних 6, який виконує наступні дві функції. По-перше, він передає вимірювальну інформацію з тією ж періодичністю, з якою вона була сформована, у блок тимчасового зберігання інформації 11, у якому зберігається вимірювальна інформація, накопичена протягом останнього інтервалу часу ∆t2, а також значення параметрів руху, сформовані протягом цього ж часу, і відбувається постійний циклічний перезапис цих даних. По-друге, раз на інтервал часу ∆t3, що складається з цілого числа інтервалів ∆t1, блок розподілу потоків даних 6 передає вимірювальну інформацію у блок обчислення параметрів руху 7, де на її основі оцінюються координати, швидкість, прискорення і швидкість зміни прискорення автомобіля. Усі обчислені параметри руху надходять у блок тимчасового зберігання інформації 11, а також у блок контролю параметрів руху 8, звідки, через кожний інтервал часу ∆t4, що складається з цілого числа інтервалів ∆t3, вектор координат автомобіля передається у блок формування критеріїв аналізу 9. Паралельно з цим, у цей же блок безперервно надходять дані про межі зон населеного пункту і час формування формалізованих правил руху для цих зон, отримувані приймальним пристроєм 10 від усіх центрів поширення інформації 2, що перебувають в області радіовидимості для поточного місця перебування автомобіля. У блоці формування критеріїв аналізу 9 постійно зберігається поточний перелік найближчих зон населеного пункту, що складається з зони перебування автомобіля і сусідніх з нею зон, а також інформація про формалізовані правила руху в межах цих зон і про час формування цих даних. Через кожний інтервал часу ∆t4, в результаті аналізу координат автомобіля і даних про межі зон населеного пункту, у блоці формування критеріїв аналізу 9 визначається, у якій із зон перебуває автомобіль. Якщо визначена поточна зона перебування входить до вже існуючого переліку найближчих зон, то виконується оновлення формалізованих правил руху для цієї зони. Для цього 4 UA 101717 C2 5 10 15 20 25 30 35 40 45 50 55 60 порівнюється час формування пакету даних, що транслюється відповідним центром поширення інформації 2, і правил руху, які зберігаються у блоці формування критеріїв аналізу 9, і, якщо трансльовані дані були сформовані пізніше, то для цієї зони виконується завантаження нового пакету даних, прийнятого приймальним пристроєм 10, і заміна старого набору правил руху на новий. Якщо визначена поточна зона перебування не входить до створеного раніше переліку найближчих зон, то для цієї зони виконується завантаження прийнятого приймальним пристроєм 10 пакету даних, що містить формалізовані правила руху. Після цього виконується спільна обробка координат автомобіля з правилами руху в межах поточної зони перебування і визначаються обмеження для параметрів руху (інтервали їх допустимих значень), що існують у поточному місці перебування автомобіля. Ці обмеження формуються і передаються у блок контролю параметрів руху 8 раз на інтервал часу ∆t4. У тому разі, якщо визначена поточна зона перебування автомобіля відрізняється від зони перебування, інформація про яку зберігається у блоці формування критеріїв аналізу 9, створюється новий перелік найближчих зон і набір формалізованих правил руху для них. При цьому втрачається вся інформація, що стосується зон, які були включені до старого переліку, але не увійшли до нового, а для кожної зони, яка не входила до старого переліку і була включена до нового, виконується завантаження прийнятого приймальним пристроєм 10 від відповідного центру поширення інформації 2 пакету даних, що містить формалізовані правила руху в межах цієї зони. Для решти зон, тобто для тих, що були і залишаються у переліку найближчих зон, виконується оновлення формалізованих правил руху за алгоритмом, описаним вище. У тому разі, якщо поточна зона перебування автомобіля залишилася незмінною, виконується оновлення формалізованих правил руху для усіх сусідніх з нею зон. У блоці контролю параметрів руху 8 виконується порівняння оцінок реальних значень параметрів руху з межами інтервалів їх допустимих значень, в результаті чого формується набір ознак, що характеризують наявність чи відсутність порушення кожного з обмежень. Такі перевірки значень параметрів руху виконуються через кожний інтервал часу At3, але при цьому, в межах одного інтервалу часу ∆t4, використовується фіксований набір сформованих обмежень. Разом з цим, виконується додаткова перевірка: якщо швидкість зміни прискорення автомобіля перевищує граничне допустиме значення, встановлене для цього параметра, то робиться висновок про виникнення ДТП і формується відповідна ознака. Усі ознаки, сформовані у блоці контролю параметрів руху 8, а також поточні значення параметрів руху передаються у блок керування 12, де відбувається їх аналіз. Якщо сформовані ознаки свідчать про недопустимі значення якихось параметрів руху, що означає порушення правил руху, то блок керування 12 передає до запам'ятовуючого блока 16 ці ознаки, обчислені поточні значення усіх параметрів руху, пакет формалізованих правил руху для поточної зони перебування автомобіля, отриманий за запитом від блока формування критеріїв аналізу 9, а також вимірювальну інформацію, отриману за запитом від блока тимчасового зберігання інформації 11. Взагалі, до запам'ятовуючого блока 16 заноситься вимірювальна інформація, накопичена протягом інтервалу часу ∆t5 (∆t5 < ∆t2, де ∆t2 визначається ємністю блока тимчасового зберігання інформації 11), що передує першому моменту визначення порушення, протягом часу тривання порушення, а також протягом інтервалу часу ∆t5 після останнього моменту визначення порушення. При цьому момент визначення порушення вважається першим, якщо до нього протягом інтервалу часу ∆t5 не було визначено ні одного порушення правил руху, останнім якщо після нього протягом інтервалу часу ∆t5 не було визначено ні одного порушення правил руху, а якщо між першим і останнім моментами визначення порушення існують проміжки часу тривалістю менше, ніж ∆t5, протягом яких порушень не було, то відповідна вимірювальна інформація також заноситься до запам'ятовуючого блока 16. Пакет формалізованих правил руху для поточної зони перебування автомобіля заноситься до запам'ятовуючого блока 16 у перший момент визначення порушення правил руху, і, крім того, протягом часу тривання порушення - кожен раз при зміні зони перебування автомобіля або у разі отримання оновлених правил руху для цієї зони. Також до запам'ятовуючого блока 16 записуються усі значення параметрів руху, визначені протягом часу тривання порушення, і усі сформовані ознаки, що свідчать про факт порушення. У моменти визначення факту порушення правил руху блок керування 12 подає сигнал на увімкнення блока індикації факту порушення правил руху 15, який звуковим сигналом сповіщає водія про порушення ним правил руху, а також на спеціальному екрані відображає (у вигляді відповідних дорожніх знаків та інших умовних позначень) інформацію про те, які саме правила 5 UA 101717 C2 5 10 15 20 25 30 35 40 45 50 55 60 порушуються. У моменти, коли результати обробки свідчать про припинення порушення правил, блок керування 12 подає сигнал на вимкнення блока індикації факту порушення правил руху 15. Якщо була сформована ознака, що свідчить про факт виникнення ДТП, то блок керування 12 передає поточні координати у блок формування повідомлення про ДТП 13, де виконуються наступні дії: - на основі поточних координат створюється повідомлення про факт і місце виникнення ДТП; - подається сигнал на увімкнення блока індикації факту виникнення ДТП 18, який світловим і звуковим сигналами сповіщає водія про те, що в результаті проведеного аналізу параметрів руху було зроблено висновок про виникнення ДТП; - подається сигнал на увімкнення блока додаткового контролю 17, який протягом часу ∆t6 очікує від водія сигналу про скасування висновку про виникнення ДТП. Якщо протягом часу ∆t6 водій подає сигнал про скасування висновку про виникнення ДТП, то цей сигнал передається у блок формування повідомлення про ДТП 13, і сформоване повідомлення втрачається. Крім того, блоком формування повідомлення про ДТП 13 подається команда на вимкнення блока індикації факту виникнення ДТП 18. Якщо протягом часу ∆t6 висновок про виникнення ДТП не був скасований, то цей висновок вважається підтвердженим, відповідна інформація надходить у блок формування повідомлення про ДТП 13, і сформоване повідомлення через передавальний пристрій 14 передається до центру збору і обробки інформації 1. Одночасно з цим, підтвердження висновку про виникнення ДТП надходить у блок керування 12, після чого цей блок отримує за запитом від блока тимчасового зберігання інформації 11 і передає у запам'ятовуючий блок 16 вимірювальну інформацію і параметри руху, накопичені протягом інтервалу часу ∆t5 до моменту виникнення ДТП, а також, якщо це можливо, від моменту виникнення ДТП і до моменту підключення до багатофункціональної автомобільної бортової апаратури 3 переносного апаратно-програмного модуля 4. При підключенні переносного апаратно-програмного модуля 4 до багатофункціональної автомобільної бортової апаратури 3 цей модуль завантажує інформацію, що накопичилась у бортовому запам'ятовуючому блока 16 автомобіля. У переносному апаратно-програмному модулі 4 ця інформація надходить на вхід пристрою для зчитування даних 20, проводиться її оперативний аналіз за допомогою переносного комп'ютера 22 з відповідним програмним забезпеченням, і на екрані відображаються результати цього аналізу. Одночасно з цим GPS/GNSS-приймач 21 визначає координати місця підключення переносного апаратнопрограмного модуля 4 до багатофункціональної автомобільної бортової апаратури 3. Для того, щоб отримати ці координати з максимально можливою точністю, переносний апаратнопрограмний модуль 4 розміщується так, щоб забезпечити його GPS/GNSS-приймачу 21 пряму видимість як можна більшої кількості навігаційних супутників. Потім передавальний пристрій 24 передає в центр збору і обробки інформації 1 всю отриману інформацію, включаючи результати оперативного аналізу даних, координати місця його проведення і навігаційні виміри, за якими були визначені ці координати. В разі використання переносного апаратно-програмного модуля 4 на місці виникнення ДТП до його розміщення висувається додаткова вимога: максимально можливе наближення антени його GPS/GNSS-приймача 21 до антени GPS/GNSS-приймача 5, що входить до складу багатофункціональної автомобільної бортової апаратури 3 автомобіля, що потрапив у ДТП. Відстань між антенами цих двох GPS/GNSS-приймачів вимірюється, і переносний апаратнопрограмний модуль 4 залишається у вибраному для нього місці на час, не менший визначеного наперед At7. Накопичена GPS/GNSS-приймачем 21 переносного апаратно-програмного модуля 4 вимірювальна інформація передається у центр збору і обробки інформації 1 разом з вимірами GPS/GNSS-приймача 5 багатофункціональної автомобільної бортової апаратури 3 автомобіля, що потрапив у ДТП, і з виміряною відстанню між антенами цих двох GPS/GNSS-приймачів. У центрі збору і обробки інформації 1, куди регулярно надходять дані від переносних апаратно-програмних модулів 4, виконується обробка й детальний аналіз GPS/GNSS - вимірів, зареєстрованих багатофункціональною автомобільною бортовою апаратурою 3, при цьому залучається інформація найближчих перманентних та/або контрольних диференціальних станцій супутникової навігації, а також точні ефемериди і карти іоносфери. В процесі цього аналізу перевіряється, чи дійсно зареєстрована інформація підтверджує факт порушення правил дорожнього руху, або детально аналізуються обставини, за яких виникло ДТП. Якщо дані були збережені в результаті ДТП і з якихось причин їх кількість та/або якість після моменту фіксації виникнення ДТП є незадовільною, то в процесі оброблення залучається також зареєстрована на місці ДТП вимірювальна інформація GPS/GNSS-приймача 21, що входить до 6 UA 101717 C2 5 10 15 20 25 30 35 40 45 50 55 складу переносного апаратно-програмного модуля 4. У координати, визначені за цією інформацією, вноситься поправка на відстань між антенами GPS/GNSS-приймачів багатофункціональної автомобільної бортової апаратури 3 і переносного апаратно-програмного модуля 4, і таким чином визначається місце остаточної зупинки автомобіля, що потрапив у ДТП. Завдяки цьому підвищується точність визначення його попередньої траєкторії. Дані, при аналізі яких факт порушення правил руху підтвердився, а також дані, що відповідають фактам виникнення ДТП, накопичуються і архівуються. Таким чином, створюється єдина база даних, що містить усі ДТП і усі порушення правил дорожнього руху, скоєні водіями у межах даного населеного пункту. Вона може бути використана для автоматизованого виявлення порушників, а також для вивчення статистики ДТП і порушень правил руху. Під час створення даної системи населений пункт, де вона впроваджується в дію, поділяється на зони (їх кількість визначається розмірами цього пункту), в кожній з яких розгортається центр поширення інформації 2. Межі цих зон визначаються таким чином, щоб зони деякою мірою перекривалися, завдяки чому досягається безперервність забезпечення користувачів інформацією про правила руху. Кожен з центрів поширення інформації 2 з'єднується за допомогою провідного зв'язку з єдиним центром збору і обробки інформації 1, а також оснащується радіотехнічним пристроєм для передачі споживачам інформації про формалізовані правила руху та про межі даної зони. В рамках центру збору і обробки інформації 1 створюється одне або кілька (в залежності від розмірів населеного пункту, в якому вводиться в дію пропонована система) автоматизованих робочих місць, оснащених настільними комп'ютерами, на яких зберігається база даних, що містить інформацію про діапазони дії усіх дорожніх знаків даного населеного пункту, а також інстальоване програмне забезпечення, призначене для формування формалізованих правил руху (обмежень) і для проведення ретельної обробки і детального аналізу інформації, накопиченої у запам'ятовуючих блоках 16, що входять до складу багатофункціональної автомобільної бортової апаратури 3. Автотранспортні засоби обладнуються багатофункціональною автомобільною бортовою апаратурою 3, а працівники служб, що виконують оперативний збір інформації у випадках ДТП, забезпечуються переносними апаратно-програмними модулями 4. Значення параметрів даної системи ∆t1, ∆t2, ∆t3, ∆t4, ∆t5, ∆t6 і ∆t7 залежать від конкретних умов функціонування системи і також задаються під час її створення. Таким чином, запропонована автоматизована система збору інформації про параметри руху автомобіля та аналізу причин виникнення дорожньо-транспортної пригоди базується на обчисленні за сигналами глобальних навігаційних супутникових систем і подальшому аналізі не тільки координат, але і таких параметрів руху, як швидкість, прискорення і швидкість зміни прискорення даного автомобіля. Спільна обробка усіх визначених параметрів руху автомобіля та існуючих формалізованих правил дорожнього руху забезпечить обов'язковість виявлення таких допущених порушень правил руху, як перевищення швидкості, порушення правил паркування, виїзд на зустрічну смугу, розворот у неналежному місці, а також визначення факту виникнення ДТП. Збереження даних про виявлені порушення правил дорожнього руху в бортових запам'ятовуючих блоках 16 транспортних засобів дасть можливість централізованого збору і накопичення цієї інформації для її подальшої обробки і аналізу. Збереження у запам'ятовуючому блоці 16 інформації про параметри руху автомобіля безпосередньо перед виникненням ДТП і залучення при подальшому аналізі цих даних навігаційної вимірювальної інформації, накопиченої GPS/GNSS-приймачем 21, що входить до складу переносного апаратно-програмного модуля 4, дозволить підвищити швидкість і ефективність аналізу обставин, за яких сталася ця ДТП. Наявність у складі запропонованої системи центру збору і обробки інформації 1 дозволить виконувати ретельну обробку зібраних багатофункціональною автомобільною бортовою апаратурою 3 даних, при проведенні якої передбачене залучення додаткової інформації. Завдяки цьому підвищиться надійність остаточних висновків про наявність чи відсутність порушення правил дорожнього руху у кожному конкретному випадку, а також надійність визначення винуватця ДТП. Внаслідок усього зазначеного, використання даної системи дозволить підвищити дисципліну водіїв, а отже, скоротити кількість дорожньо-транспортних пригод на автодорогах і зробити дорожній рух безпечнішим. 7 UA 101717 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 30 35 40 45 Автоматизована система збору інформації про параметри руху автомобіля та аналізу причин виникнення дорожньо-транспортної пригоди, що включає в себе: центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу багатофункціональної автомобільної бортової апаратури входять: GPS/GNSS-приймач, блок розподілу потоків даних, блок обчислення параметрів руху, блок контролю параметрів руху, блок формування критеріїв аналізу, приймальний пристрій, блок тимчасового зберігання інформації, блок керування, блок формування повідомлення про ДТП, передавальний пристрій, блок індикації факту порушення правил руху, запам'ятовуючий блок, блок додаткового контролю, блок індикації факту виникнення ДТП і блок електроживлення, яка відрізняється тим, що кожен переносний апаратно-програмний модуль додатково включає в себе GPS/GNSS-приймач, і при цьому кожен вихід центру збору і обробки інформації з'єднаний із входом одного з центрів поширення інформації, кожен центр поширення інформації передає дані багатофункціональній автомобільній бортовій апаратурі, у якій ці дані надходять на вхід приймального пристрою, вихід якого з'єднаний з першим входом блока формування критеріїв аналізу, другий вхід і перший вихід якого з'єднані з першими виходом і входом блока контролю параметрів руху, а вихід GPS/GNSS-приймача через блок розподілу потоків даних з'єднаний з першим входом блока тимчасового зберігання інформації і входом блока обчислення параметрів руху, перший вихід якого з'єднаний з другим входом блока контролю параметрів руху, а другий вихід блока обчислення параметрів руху з'єднаний з другим входом блока тимчасового зберігання інформації, першими входом і виходом блок керування з'єднаний відповідно з виходом і третім входом блока тимчасового зберігання інформації, другими виходом і входом блок керування з'єднаний відповідно із входом і виходом запам'ятовуючого блока, третіми виходом і входом блок керування з'єднаний з першими входом і виходом блока формування повідомлення про ДТП, четвертими виходом і входом блок керування з'єднаний з третім входом і другим виходом блока формування критеріїв аналізу, п'ятим входом блок керування з'єднаний з другим виходом блока контролю параметрів руху, п'ятим виходом блок керування з'єднаний із входом блока індикації факту порушення правил руху, другими виходом і входом блок формування повідомлення про ДТП з'єднаний із входом і виходом блока додаткового контролю, третій вихід блока формування повідомлення про ДТП з'єднаний із входом блока індикації факту виникнення ДТП, четвертий вихід блока формування повідомлення про ДТП з'єднаний із входом передавального пристрою, який передає інформацію у центр збору і обробки, а шостий вихід блока керування на час передачі даних з'єднується з входом пристрою для зчитування даних, що входить до складу переносного апаратно-програмного модуля, і при цьому блок електроживлення з'єднаний із входами живлення GPS/GNSS-приймача, блока розподілу потоків даних, блока обчислення параметрів руху, блока контролю параметрів руху, блока формування критеріїв аналізу, приймального пристрою, блока керування, блока формування повідомлення про ДТП, передавального пристрою, блока індикації факту порушення правил руху, блока додаткового контролю і блока індикації факту виникнення ДТП; а в переносному апаратнопрограмному модулі дані від багатофункціональної автомобільної бортової апаратури надходять на вхід пристрою для зчитування даних, вихід якого з'єднаний із першим входом переносного комп'ютера, причому з другим входом переносного комп'ютера з'єднаний вихід GPS/GNSS-приймача, а вихід переносного комп'ютера з'єднаний із входом передавального пристрою, вихід якого на час передачі даних з'єднується з входом центру збору і обробки інформації, і при цьому блок електроживлення з'єднаний із входами живлення пристрою для зчитування даних, GPS/GNSS-приймача, переносного комп'ютера і передавального пристрою. 8 UA 101717 C2 9 UA 101717 C2 10 UA 101717 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomated system for collection of information on parameters of motion of a vehicle and analysis of causes of a traffic accident
Автори англійськоюDokhov Oleksandr Ivanovych, Lukianov Oleksandr Mykhailovych, Hrinchenko Olena Volodymyrivna, Lukianova Olha Oleksiivna, Halevych Maksym Mykolaiovych
Назва патенту російськоюАвтоматизированная система сбора информации о параметрах движения автомобиля и анализа причин возникновения дорожно-транспортного происшествия
Автори російськоюДохов Александр Иванович, Лукьянов Александр Михайлович, Гринченко Елена Владимировна, Лукьянова Ольга Алексеевна, Галевич Максим Николаевич
МПК / Мітки
МПК: G08G 1/056, G08G 1/052, G01C 21/28
Мітки: аналізу, автомобіля, параметри, система, руху, дорожньо-транспортної, пригоди, збору, виникнення, причин, автоматизована, інформації
Код посилання
<a href="https://ua.patents.su/13-101717-avtomatizovana-sistema-zboru-informaci-pro-parametri-rukhu-avtomobilya-ta-analizu-prichin-viniknennya-dorozhno-transportno-prigodi.html" target="_blank" rel="follow" title="База патентів України">Автоматизована система збору інформації про параметри руху автомобіля та аналізу причин виникнення дорожньо-транспортної пригоди</a>
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди
Номер патенту: 91792
Опубліковано: 25.08.2010
Автори: Дохов Олександр Іванович, Лук'янова Ольга Олексіївна, Грінченко Олена Володимирівна, Лук'янов Олександр Михайлович, Сітенко Олександр Миколайович
МПК: G01C 21/26, G08G 1/056, G08G 1/052
Мітки: правил, дорожнього, дотримання, визначення, автоматизованого, виникнення, система, автомобіля, пригоди, факту, водієм, контролю, дорожньо-транспортної, руху
Формула / Реферат:
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GPS/GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні...
Спосіб збору, аналізу інформації, прийняття рішень та оповіщення про виникнення позаштатної ситуації і пристрій для його здійснення
Номер патенту: 20114
Опубліковано: 25.12.1997
Автор: Грецов Олексій Валерійович
МПК: G08B 25/00
Мітки: рішень, збору, пристрій, виникнення, здійснення, оповіщення, ситуації, спосіб, позаштатної, інформації, прийняття, аналізу
Формула / Реферат:
1. Способ сбора анализа информации, принятия решения и оповещения о возникшей нештатной ситуации, включающий в себя процессы сбора информации о состоянии каждого из объетов, поступающей по каналам электро- и радиосвязи и визуального наблюдения, ее анализа, принятия решения о возникновении на каждом из объектов одной и той же конкретной ситуации, передачи речевой информации на частоте радиооповещения соответствующей службы реагирования,...
Автоматизована система для визначення вхідної інформації для розробки графіка руху пасажирських поїздів за допомогою імітаційного моделювання
Номер патенту: 76548
Опубліковано: 10.01.2013
Автори: Альошинський Євген Семенович, Сіваконева Ганна Олександрівна
МПК: B61L 27/00
Мітки: графіка, вхідної, визначення, допомогою, моделювання, інформації, автоматизована, поїздів, пасажирських, система, розробки, імітаційного, руху
Формула / Реферат:
Автоматизована система, яка складається з автоматизованого робочого місця інженера-графіста, засобів технічного розвитку станцій залізничної мережі, екрана відображення інформації, пристрою введення початкових даних, яка відрізняється тим, що додатково містить блок для визначення вхідної інформації для розробки графіка руху пасажирських поїздів, який складається із АРМ інженера-графіста, блока виведення результатів моделювання, блока...
Автоматизована система синтаксичного аналізу для мікропроцесорних пристроїв
Номер патенту: 42591
Опубліковано: 15.10.2003
Автори: Горобець Андрій Євгенович, Нікулін Сергій Сергійович, Чумаченко Ігор Володимирович, Мелешенко Світлана Юріївна, Дергачов Володимир Андрійович, Почекаєв Димитрий Юрійович
МПК: G10L 15/00, G06F 11/00
Мітки: мікропроцесорних, синтаксичного, система, пристроїв, аналізу, автоматизована
Формула / Реферат:
Автоматизована система синтаксичного аналізу для мікропроцесорних пристроїв, що має вхідний регістр, дешифратор лексичних одиниць, блок керування, вихід значення наявності помилки, вихід значення про успішний аналіз, інформаційні виходи вхідного регістра з'єднані з входами дешифратора лексичних одиниць, виходи якого з'єднані з першою групою входів логічних умов блока керування, перший вихід блока керування з'єднаний із входом синхронізації...
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху

Номер патенту: 88999
Опубліковано: 10.12.2009
Автори: Лук'янов Олександр Михайлович, Лук'янова Ольга Олексіївна, Дохов Олександр Іванович, Грінченко Олена Володимирівна
МПК: G08G 1/052, G08G 1/056, G01C 21/26
Мітки: водієм, дотримання, система, автоматизованого, руху, автомобіля, дорожнього, правил, контролю
Формула / Реферат:
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні апаратно-програмні модулі, а багатофункціональна автомобільна...
Попередній патент: Калориметр теплового потоку
Наступний патент: Пристрій для обкатування великих різьб і архімедових черв’яків роликами
Випадковий патент: Спосіб іммобілізації неякісних фармацевтичних препаратів