Лінійний асинхронний регульований електропривод
Номер патенту: 104919
Опубліковано: 25.03.2014
Автори: Голіков Володимир Володимирович, Жукова Наталія Вікторівна, Литвинова Таісія Серафимівна, Литвинов Віктор Іванович

Формула / Реферат
Лінійний асинхронний регульований електропривод, що містить блок управління, що складається з мікроконтролера, формуючого програмним чином три широтно-імпульсних модулятори і три фазообертачі, що утворюють синусоїдальні фазні струми з постійною амплітудою, зміщені за часом відносно один до одного на третину періоду, і узгоджувального драйвера, а також силовий блок, що складається з нерегульованої постійної ланки і трьох чотириключових інверторів, входи яких підключені до блока управління, а вихід кожного інвертора з'єднаний з одною фазою асинхронного електродвигуна, який відрізняється тим, що при заданій частоті ![]() електропривода в широтно-імпульсних модуляторах встановлені тривалості робочих імпульсів
електропривода в широтно-імпульсних модуляторах встановлені тривалості робочих імпульсів ![]() , що становлять частину тактових імпульсів тривалістю
, що становлять частину тактових імпульсів тривалістю ![]() , де
, де ![]() - число розбиття періоду
- число розбиття періоду ![]() ,
, ![]() - поточний номер коду робочих імпульсів відповідно до трьох фаз
- поточний номер коду робочих імпульсів відповідно до трьох фаз ![]() ,
, ![]() ,
, ![]() ,
, ![]() = ціла частина
= ціла частина ![]() ,
, ![]() - коефіцієнт, при якому сила електричного струму нерегульованої постійної ланки дорівнює потрійному фазному струму асинхронного двигуна, що працює в режимі холостого ходу.
- коефіцієнт, при якому сила електричного струму нерегульованої постійної ланки дорівнює потрійному фазному струму асинхронного двигуна, що працює в режимі холостого ходу.
Текст
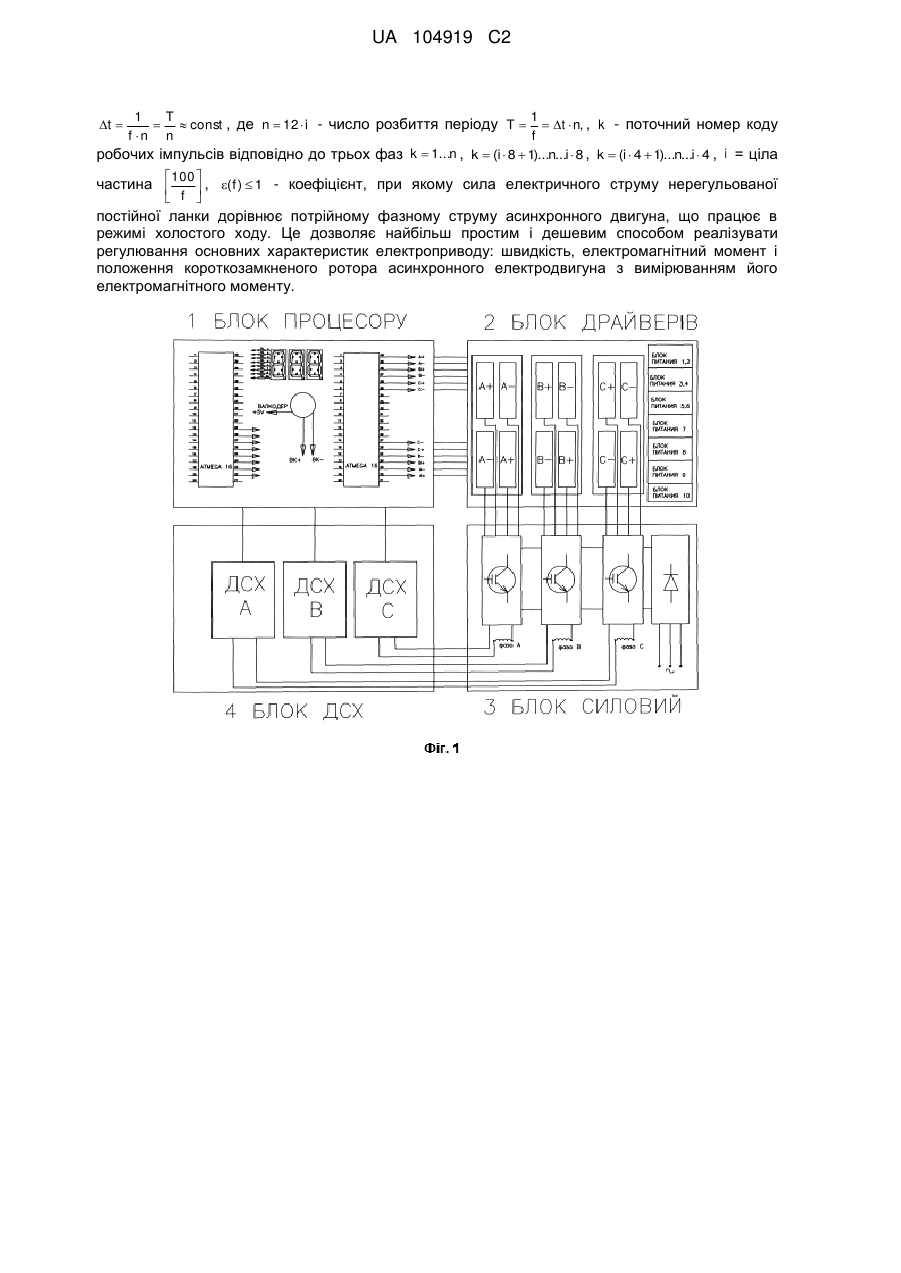
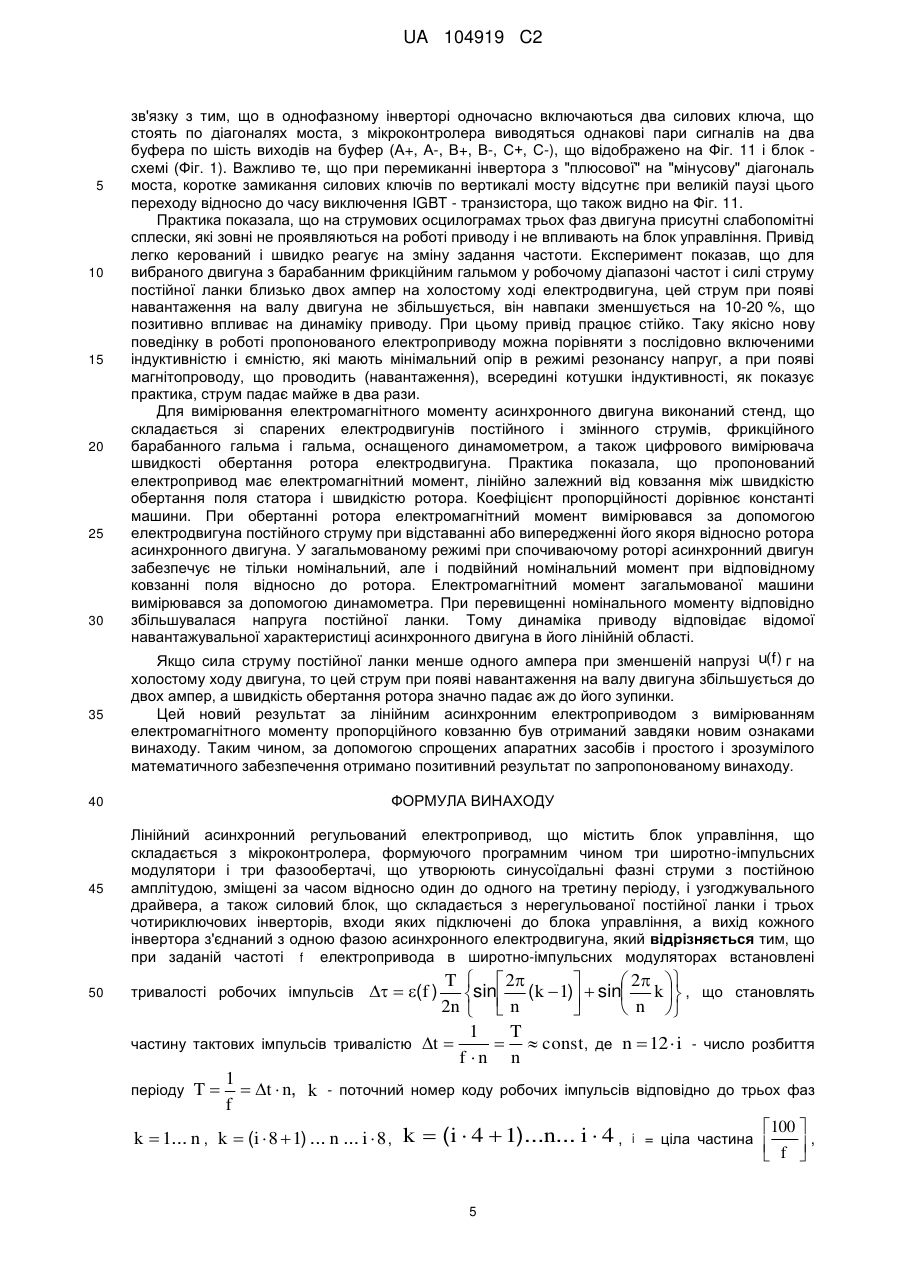
Реферат: Винахід належить до регульованих асинхронних електроприводів і може бути використаний при виробництві трифазного або однофазного частотного перетворювача, а також енергозберігаючого асинхронного електроприводу електромобіля на основі простої схеми управління. Асинхронний керований електропривод містить блок управління, що складається з мікроконтролера, формуючого програмним чином три широтно-імпульсних модулятори і три фазообертачі, що утворюють синусоїдальні фазні струми з постійною амплітудою, зміщені за часом відносно один до одного на третину періоду, і узгоджувального драйвера, а також силовий блок, що складається з нерегульованої постійної ланки і трьох чотириключових інверторів, входи яких підключені до блока управління, а вихід кожного інвертора з'єднаний з одною фазою асинхронного електродвигуна, додатково при заданій частоті f електропривода в широтно-імпульсних модуляторах встановлені тривалості робочих імпульсів ( f ) T 2 2 (k 1) sin k , sin 2n n n що становлять частину тактових імпульсів тривалістю UA 104919 C2 (12) UA 104919 C2 1 T 1 const , де n 12 i - число розбиття періоду T t n, , k - поточний номер коду f n n f робочих імпульсів відповідно до трьох фаз k 1...n , k (i 8 1)...n...i 8 , k (i 4 1)...n...i 4 , i = ціла t 100 частина , (f ) 1 - коефіцієнт, при якому сила електричного струму нерегульованої f постійної ланки дорівнює потрійному фазному струму асинхронного двигуна, що працює в режимі холостого ходу. Це дозволяє найбільш простим і дешевим способом реалізувати регулювання основних характеристик електроприводу: швидкість, електромагнітний момент і положення короткозамкненого ротора асинхронного електродвигуна з вимірюванням його електромагнітного моменту. UA 104919 C2 5 10 15 20 25 30 35 40 45 Винахід належить до регульованих асинхронних електроприводів і може бути використаний при виробництві трифазного або однофазного частотного перетворювача, а також енергозберігаючого асинхронного електроприводу електромобіля на основі простої схеми управління. Відомий асинхронний регульований електропривод на основі використання побічно вимірюваного, а не обчислюваного електромагнітного моменту за допомогою складних програмних засобів (Лінійний асинхронний регульований електропривод, патент України на винахід № 92712, Н02Р 9/00, заявл. 13.02.09; опубл. 25.11.10, Бюл. № 22). У даному регульованому електроприводі електромагнітний момент не обчислюється, а побічно вимірюється у вигляді лінійної залежності MЭМ С S від ковзання S між швидкістю обертання магнітного поля статора і швидкістю короткозамкненого ротора в лінійній області роботи асинхронного електродвигуна. Цей момент утворюється безперервно обертовим магнітним полем з керованою частотою цього обертання. Безперервно обертане магнітне поле утворюється трьома фазними струмами синусоїдальної форми In I0 sinP (1 s)t n , де n номер фази n 0 ,120 , 240 , P - кутова швидкість ротора, S - ковзання. У кожній фазній обмотці електродвигуна фазні струми синусоїдальної форми отримуються за допомогою окремих чотириключових однофазних інверторів, що працюють від власних широтно-імпульсних модуляторів (ШІМ), пов'язаних зсувом фаз і заданим ковзанням. Згаданий лінійний асинхронний регульований електропривод містить блок управління і силовий блок, що складається з постійної ланки і інвертора, вхід якого підключений до блока управління, а вихід - до фазних обмоток асинхронного електродвигуна. Блок управління і силовий блок виконані триканальними, причому кожен канал блока управління містить фазообертач, широтно-імпульсний модулятор і систему імпульсно-фазового управління, а кожен канал силового блока містить регульовану постійну ланку і чотириключовий інвертор, причому кожна фазна обмотка електродвигуна підключена окремо до виходів одного інвертора силового блока. Цей електропривод є найбільш близьким по технічній суті до електроприводу, що заявляється, і тому вибраний як прототип. Недоліком прототипу є те, що непряме вимірювання електромагнітного моменту вимагає використання регуляторів фазних струмів у вигляді регульованих постійних ланок. Наявність цих додаткових пристроїв збільшує вартість обладнання. В основу винаходу поставлено задачу - удосконалити асинхронний керований електропривод за рахунок спрощення апаратних засобів, при цьому зберігаючи основну перевагу прототипу - можливість вимірювання електромагнітного моменту, а не йогообчислення. Завдяки потім ознакам можна виконати простий частотний перетворювач з простими регуляторами моменту, швидкості, положення, використовуючи прості апаратні засоби та математичне забезпечення. Поставлена задача вирішується за рахунок того, що в заявлюваному лінійному асинхронному регульованому електроприводі, що містить блок управління, що складається з мікроконтролера, формуючого програмним чином три широтно-імпульсних модулятори і три фазообертачі, що утворюють синусоїдальні фазні струми з постійною амплітудою зміщені за часом відносно один одного на третину періоду, і узгоджувального драйвера, а також силовий блок, що складається з нерегульованої постійної ланки і трьох чотириключових інверторів, входи яких підключені до блока управління, а вихід кожного інвертора з'єднаний з одною фазою асинхронного електродвигуна, додатково при заданій частоті f електропривода в широтноімпульсних модуляторах встановлені тривалості робочих імпульсів ( f ) T 2 2 , що становлять частину тактових імпульсів тривалістю (k 1) sin k sin 2n n n 1 T const 1 f n n , де n 12 i - число розбиття періоду T t n , k - поточний номер коду f робочих імпульсів відповідно до трьох фаз k 1...n , k (i 8 1)...n...i 8 , k (i 4 1)...n...i 4 , i = t 50 100 ціла частина f , (f ) 1 - коефіцієнт, при якому сила електричного струму нерегульованої постійної ланки дорівнює потрійному фазному струму асинхронного двигуна, що працює в режимі холостого ходу. 1 UA 104919 C2 5 10 15 20 25 30 35 40 45 50 Спільними ознаками для електроприводу, що заявляється, і електроприводу, вибраного як прототип, є блок управління, що складається з мікроконтролера, формуючого програмним чином три широтно-імпульсних модулятори і три фазообертачі, що утворюють синусоїдальні фазні струми з постійною амплітудою зміщені за часом відносно один одного на третину періоду, і узгоджувального драйвера, а також силовий блок, що складається з нерегульованої постійної ланки і трьох чотириключових інверторів, входи яких підключені до блока управління, а вихід кожного інвертора з'єднаний з одною фазою асинхронного електродвигуна. Виходячи із суті винаходу, в асинхронному приводі прототипу конфігурація обертового магнітного поля і його величина зберігається при зміні частоти його обертання за допомогою двох незалежно працюючих пристроїв: ШІМ - формувачів синусоїдальних струмів кожної фази і регуляторів амплітуд цих струмів за допомогою регульованих постійних ланок із зворотними зв'язками за фазними струмами. У технічному рішенні, що заявляється, ШІМ- формувачі виконують подвійну функцію з формування синусоїдальних фазних струмів і їх амплітуд, які зберігаються на постійному рівні при заданій частоті f електроприводу за допомогою того, що в широтно-імпульсних модуляторах встановлені тривалості робочих імпульсів ( f ) T sin 2 (k 1) sin 2 k , n 2n n що становлять частину тактових імпульсів тривалістю t 1 T const , де n 12 i - число f n n 1 розбиття періоду T t n, k - поточний номер коду робочих імпульсів відповідно до трьох f k 1...n , k (i 8 1)...n...i 8 , k (i 4 1)...n...i 4 , i = ціла частина 100 , (f ) 1 фаз f коефіцієнт, при якому сила електричного струму нерегульованої постійної ланки дорівнює потрійному фазному струму асинхронного двигуна, що працює в режимі холостого ходу. Лінійний асинхронний регульований електропривод пояснюється наступними фігурами. На Фіг. 1 наведена блок - схема лінійного асинхронного регульованого електроприводу. На Фіг. 2 - схема мікроконтролерного блока керування електроприводом, що використається в дослідному зразку. На Фіг. 3 - схема драйверів силових ключів інвертора однієї з трьох фаз дослідного зразка електроприводу. На Фіг. 4 - схема одного драйвера для силового ключа інвертора дослідного зразка електроприводу. На Фіг. 5 - схема силового блока, що складається з постійної ланки і трьох чотириключових інверторів, що використається в дослідному зразку. На Фіг. 6 - схема датчиків струму Холла трьох фаз двигуна, що використовується в дослідному зразку. На Фіг. 7 - показані параметри трапецеїдальної ділянки синусоїди і еквівалентна її заміна прямокутником для ідентифікації ШІМ - а. На Фіг. 8 представлене кодування стану розподілу трьох синусоїдальних напруг фаз А, В, С для роботи ШІМ - а з графіком фазних напруг на активному навантаженні. На Фіг. 9 наведено алгоритм розрахунку тривалостей тактового t і робочого імпульсів u( f ) ШІМ - а при ( f ) 1 , масиви яких розміщуються в постійному запам'ятовуючому пристрої U (ПЗП) мікроконтролера. На Фіг. 10 наведено алгоритм керування силовими ключами трьох інверторів асинхронного електроприводу. На Фіг. 11 показана симуляція роботи ШІМ - а при (f ) 1. На Фіг. 12 показана експериментальна залежність амплітуди u(f ) напруги синусоїди від u( f ) частоти f і її відносна величина ( f ) 1 для асинхронного електроприводу дослідного U зразка в режимі холостого ходу електродвигуна. Лінійний асинхронний регульований електропривод виконаний у вигляді дослідного зразка і містить чотири основні блоки (Фіг. 1). Мікроконтролерний блок керування - 1 (Фіг. 2) на основі вище названих алгоритмів і розроблених програм реалізує триканальне широтно-імпульсне управління силовими IGBT - транзисторами. З метою розділення функції управління ШІМ - ом з 2 UA 104919 C2 5 10 15 20 25 30 35 40 45 функцією формування зовнішніх кіл завдання частоти приводу, її індикації, регуляторів верхнього управління із зворотними зв'язками, а також кіл параметризації об'єкта управління, тут використовуються два мікроконтролери ATM EGA 16. Названі мікроконтролери програмувались на мові assembler за допомогою програматора AVR ISP USB Light v 4.18. Виходи 1-го блока з'єднані з входами 2-го триканального блока драйверів силових ключів, які безпосередньо керують IGBT - транзисторами триканального інвертора. Три канали 2-го блока ідентичні і відповідають фазам А, В, С, один з яких показано на Фіг. 3. Кожен силовий ключ має свій драйвер (Фіг. 4), гальванічно розв'язаний з ланцюгами процесора, що забезпечено наявністю оптопар і необхідною кількістю розв'язаних стабілізованих джерел живлення. Виходи 2-го блока з'єднані з входами 3-го силового блока, що складається з трьох однофазних чотириключових інверторів і загальної нерегульованої постійної ланки. Схема 3-го силового блока показана на Фіг. 5. Триканальний інвертор виконаний на основі двох шестиключових IGBT - модулів FS10R06VE3 - В2. Силовий випрямляч (постійна ланка) складено з трьох діодних півмостів МДД-40-12. Мережевий низькочастотний фільтр великої ємності підключений до виходу силового випрямляча, а високовольтний фільтр малої місткості (снаббер) приєднаний безпосередньо до живильних шин IGBT-модулів. В середини напівмостів однофазних інверторів підключені фазні обмотки асинхронного двигуна потужністю 0,37 кВт, напругою 220/380В, струмом 1,94/1,1 А з двома парами P 2 полюсів і номінальною швидкістю 1375 об/хв. Послідовно з фазними обмотками з'єднані датчики струму Холла (ДСХ). Останні встановлені в 4-ий блок електроприводу (Фіг.6). Пропорційні датчики струму Холла ACS712ELCTR-05В-Т PBF ALLEGRO (W) мають гальванічну розв'язку з силовими ланцюгами інвертора, що зручно при контролі та управлінні приводом. Суть роботи електроприводу, що заявляється, пояснюється наступним. Нижній рівень управління електроприводом спрямований на формування в фазних обмотках асинхронного електродвигуна трьох синусоїдальних струмів постійної амплітуди із заданою частотою f , що змінюється в заданому діапазоні, при постійній напрузі силового випрямляча. Попередньо готується математичне забезпечення роботи широтно-імпульсного модулятора, що забезпечує формування на індуктивному навантаженні синусоїдального струму. Синусоїда із 1 T 1 f t T ділиться на n відрізків, однакових за часом n f n , що заданою частотою називаються тактовими імпульсами. Синусоїда складається з 4-х симетричних ділянок, а цих синусоїд треба сформувати в кількості 3-х штук, зміщених відносно одна одної на 120°. Тоді кількість відрізків має бути кратним 3 4 12 - і одиницям, тобто n 12 i . Тут i - ціле число, вибір якого залежить від умови інваріантності довжини відрізка в заданому діапазоні зміни частоти f . Наприклад, частота f =0,5…50 Гц змінюється з кроком 0,25 Гц. Логічно вимагати, щоб кількість розбивок синусоїди для будь-якої заданої частоти f було не менше n 24 при f =50 Гц і не більше n =1200 при f =1 Гц, чим забезпечується мінімальна втрата енергії при перемагнічуванні магнітопроводу двигуна. Отже, при виконанні вищезгаданої умови інваріантності t 1 const , ціле число і повинно бути функцією частоти f , а саме i = ціла f 12 i 100 . У таблиці зведені основні робочі параметри роботи ШІМ - а. З таблиці видно, чистина f що величина тактового імпульсу належить відрізку t 1 0,2 мс const в діапазоні частоти f =1…50 гц. На Фіг. 7 показані геометрія синусоїди, поділ її на трапецеїдальні ділянки, сума площ яких наближено дорівнює площі синусоїди, і еквівалентна їм заміна прямокутниками з однаковою висотою, рівною напрузі U постійної ланки, і різними їх ширинами. Площа кожної трапецеїдальної ділянки повинна бути рівна площі відповідного прямокутника. Сказане еквівалентно наступним виразами: 2 1 2 2 u(f )sin (k 1) sin k U, 2 n n n ( f ) 2 2 k , ( f ) u( f ) 1 sin (k 1) sin n n n U 3 UA 104919 C2 , 2 T (f ) 5 10 15 20 25 30 35 40 45 T 2 2 k . sin (k 1) sin 2n n n Тут n 12 i - число розбиття періоду T синусоїди, i = ціла частина 100 ; f k 1...n - поточний номер елемента трапеції або номер її коду; U - напруга постійної ланки (висота прямокутника); - ширина еквівалентного прямокутника з висотою, рівною U ; - тривалість робочого імпульсу з номером коду, рівного k , використаного в роботі широтно-імпульсного модулятора. u(f ) - еквівалентна амплітуда синусоїдальної напруги з поточною частотою f . На фіг. 8 наведено кодування стану розподілу трьох синусоїд фаз А, В, С для роботи широтно-імпульсного модулятора при f =50 Гц, чим забезпечується базис не тільки з формування синусоїдальних струмів, але і необхідний їх зсув за фазою, відповідно змінюючи при цьому початок і кінець коду тактових імпульсів. Для фази А: k 1...n ; для фази В: k (i 8 1)...i 8 ; для фази С: k (i 4 1)...n...i 4 . Тобто, в ШІМ - і реалізована також функція фазообертача. Абсолютне ковзання S f fP між швидкістю поля статора f f / P і швидкістю ротора fP , при якому виникає номінальний електромагнітний момент, прикладений до ротора двигуна (у межах лінійної області навантажувальної характеристики), для обраного двигуна становить не 1500 1375 більше S 2,08 Гц, що відповідає частоті електроприводу f =4,16 Гц при нульовій 60 швидкості ротора двигуна. Тоді нижня межа задання частоти електроприводу може бути не більше f =0,5 Гц. Це дозволяє регулювати електромагнітний момент від 12,5 % до 100 % і більше на нульовій швидкості ротора. Відомо, що при переході в другу зону регулювання ( f 50 Гц) електромагнітний момент значно падає при зростанні частоти приводу, тому область при f 50 Гц в пропонованому винаході не розглядається. Використаний мікроконтролерний блок керування протягом 1c паралельно в часі видає команду по 12-і входам триканального інвертора на включення або виключення IGBT транзисторів. Тому попередньо в П3П мікропроцесора в режимі параметризації вводиться одновимірний і двовимірний масиви даних тривалостей тактових t(f ) і робочих (f,k) імпульсів. Алгоритм розрахунку названих тактового і робочого імпульсів наведено на Фіг. 9. Тривалість робочого імпульсу коригується за допомогою коефіцієнта ( f ) u( f ) 1 , показаного U на Фіг. 12. Зазначене коригування в робочому діапазоні частоти f може виконуватися автоматично за допомогою спеціальної програми в режимі параметризації при холостому обертанні ротора двигуна і фіксації сили струму постійної ланки на рівні тройного фазного струму IXX холостого ходу двигуна. Для дослідного зразка електроприводу взято асинхронний двигун з технічними характеристиками: напругою / / 220/380В; струмом 1,9/1,1 А; потужністю 0,37 кВт; номінальною швидкістю 1375 об/хв. Вибраний двигун має фазний струм холостого ходу IXX 0,65 IH . Тому в режимі холостого ходу двигуна струм постійної ланки складає u( f ) 1 3 IXX 3 IH 0,65 3 11 0,65 2,15 A . Експериментальна залежність коефіцієнта ( f ) , U від частоти f проводилася при силі струму постійної ланки, рівного 2А, і холостому ході двигуна. Поточну напругу u(f ) регулювали за допомогою автотрансформатора (латра). Тому верхня частина графіку на Фіг. 12 екстраполювалася з причини нестачі напруги. На Фіг. 10 поміщений алгоритм керування силовими ключами триканального ШІМ - а інвертора асинхронного електроприводу. Наведений один алгоритм для фази А. Відповідно для фаз В і С треба врахувати в зовнішньому циклі алгоритму зміну початку та кінця коду тактових імпульсів, що розглядалося раніше. Симуляція роботи трьох ШІМ - ів показана на Фіг. 11. У 4 UA 104919 C2 5 10 15 20 25 30 35 зв'язку з тим, що в однофазному інверторі одночасно включаються два силових ключа, що стоять по діагоналях моста, з мікроконтролера виводяться однакові пари сигналів на два буфера по шість виходів на буфер (А+, А-, В+, В-, С+, С-), що відображено на Фіг. 11 і блок схемі (Фіг. 1). Важливо те, що при перемиканні інвертора з "плюсової" на "мінусову" діагональ моста, коротке замикання силових ключів по вертикалі мосту відсутнє при великій паузі цього переходу відносно до часу виключення IGBT - транзистора, що також видно на Фіг. 11. Практика показала, що на струмових осцилограмах трьох фаз двигуна присутні слабопомітні сплески, які зовні не проявляються на роботі приводу і не впливають на блок управління. Привід легко керований і швидко реагує на зміну задання частоти. Експеримент показав, що для вибраного двигуна з барабанним фрикційним гальмом у робочому діапазоні частот і силі струму постійної ланки близько двох ампер на холостому ході електродвигуна, цей струм при появі навантаження на валу двигуна не збільшується, він навпаки зменшується на 10-20 %, що позитивно впливає на динаміку приводу. При цьому привід працює стійко. Таку якісно нову поведінку в роботі пропонованого електроприводу можна порівняти з послідовно включеними індуктивністю і ємністю, які мають мінімальний опір в режимі резонансу напруг, а при появі магнітопроводу, що проводить (навантаження), всередині котушки індуктивності, як показує практика, струм падає майже в два рази. Для вимірювання електромагнітного моменту асинхронного двигуна виконаний стенд, що складається зі спарених електродвигунів постійного і змінного струмів, фрикційного барабанного гальма і гальма, оснащеного динамометром, а також цифрового вимірювача швидкості обертання ротора електродвигуна. Практика показала, що пропонований електропривод має електромагнітний момент, лінійно залежний від ковзання між швидкістю обертання поля статора і швидкістю ротора. Коефіцієнт пропорційності дорівнює константі машини. При обертанні ротора електромагнітний момент вимірювався за допомогою електродвигуна постійного струму при відставанні або випередженні його якоря відносно ротора асинхронного двигуна. У загальмованому режимі при спочиваючому роторі асинхронний двигун забезпечує не тільки номінальний, але і подвійний номінальний момент при відповідному ковзанні поля відносно до ротора. Електромагнітний момент загальмованої машини вимірювався за допомогою динамометра. При перевищенні номінального моменту відповідно збільшувалася напруга постійної ланки. Тому динаміка приводу відповідає відомої навантажувальної характеристиці асинхронного двигуна в його лінійній області. Якщо сила струму постійної ланки менше одного ампера при зменшеній напрузі u(f ) г на холостому ходу двигуна, то цей струм при появі навантаження на валу двигуна збільшується до двох ампер, а швидкість обертання ротора значно падає аж до його зупинки. Цей новий результат за лінійним асинхронним електроприводом з вимірюванням електромагнітного моменту пропорційного ковзанню був отриманий завдяки новим ознаками винаходу. Таким чином, за допомогою спрощених апаратних засобів і простого і зрозумілого математичного забезпечення отримано позитивний результат по запропонованому винаходу. ФОРМУЛА ВИНАХОДУ 40 45 50 Лінійний асинхронний регульований електропривод, що містить блок управління, що складається з мікроконтролера, формуючого програмним чином три широтно-імпульсних модулятори і три фазообертачі, що утворюють синусоїдальні фазні струми з постійною амплітудою, зміщені за часом відносно один до одного на третину періоду, і узгоджувального драйвера, а також силовий блок, що складається з нерегульованої постійної ланки і трьох чотириключових інверторів, входи яких підключені до блока управління, а вихід кожного інвертора з'єднаний з одною фазою асинхронного електродвигуна, який відрізняється тим, що при заданій частоті f електропривода в широтно-імпульсних модуляторах встановлені T 2 2 sin (k 1) sin k , що становлять 2n n n 1 T const , де n 12 i - число розбиття частину тактових імпульсів тривалістю t f n n 1 періоду T t n, k - поточний номер коду робочих імпульсів відповідно до трьох фаз f 100 k 1... n , k (i 8 1) ... n ... i 8 , k (i 4 1)...n... i 4 , i = ціла частина , f тривалості робочих імпульсів (f ) 5 UA 104919 C2 (f ) 1 - коефіцієнт, при якому сила електричного струму нерегульованої постійної ланки дорівнює потрійному фазному струму асинхронного двигуна, що працює в режимі холостого ходу. 6 UA 104919 C2 7 UA 104919 C2 8 UA 104919 C2 9 UA 104919 C2 10 UA 104919 C2 Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
Автори англійськоюLytvynov Viktor Ivanovych, Lytvynova Taisiia Serafymivna
Автори російськоюЛитвинов Виктор Иванович, Литвинова Таисия Серафимовна
МПК / Мітки
МПК: H02P 9/46
Мітки: електропривод, лінійний, асинхронний, регульованій
Код посилання
<a href="https://ua.patents.su/13-104919-linijjnijj-asinkhronnijj-regulovanijj-elektroprivod.html" target="_blank" rel="follow" title="База патентів України">Лінійний асинхронний регульований електропривод</a>
Лінійний асинхронний регульований електропривод

Номер патенту: 92712
Опубліковано: 25.11.2010
Автори: Жукова Наталя Вікторівна, Литвинов Віктор Іванович, Литвинова Таісія Серафимівна
МПК: H02P 9/00
Мітки: лінійний, електропривод, асинхронний, регульованій
Формула / Реферат:
Лінійний асинхронний регульований електропривод, що містить блок управління і силовий блок, що складається з постійної ланки і інвертора, вхід якого підключений до блока управління, а вихід - до фазних обмоток асинхронного електродвигуна, який відрізняється тим, що блок управління і силовий блок виконані триканальними, причому кожен канал блока управління містить фазообертач, широтно-імпульсний модулятор і систему імпульсно-фазового...
Багатошвидкісний асинхронний електропривод

Номер патенту: 71485
Опубліковано: 10.07.2012
Автори: Цодік Ігор Абрамович, Бакаєв Олег Вікторович, Худобін Костянтин Вікторович
МПК: H02P 7/00
Мітки: багатошвидкісний, електропривод, асинхронний
Формула / Реферат:
Багатошвидкісний асинхронний електропривод, що містить асинхронний двигун, обмотка статора якого має схему з'єднання зірка з нульовим дротом, реактори включені у кожну фазу двигуна, семістори, які підключають фази обмотки двигуна впродовж одного півперіоду і пропускають (n-1)/2 півхвиль одного напрямку протягом n на півперіодів, а після проходження n напівперіодів напрямок струму, що пропускають семістори змінюється на протилежний, який...
Регульований електропривод змінного струму стаціонарних установок
Номер патенту: 64917
Опубліковано: 25.11.2011
Автори: Садовой Олександр Валентинович, Калюжний Володимир Владиславович, Калюжний Сергій Володимирович
Мітки: електропривод, установок, струму, змінного, стаціонарних, регульованій
Формула / Реферат:
Регульований електропривод змінного струму стаціонарних установок за системою струмопараметричного асинхронно-вентильного каскаду, в якому статор асинхронного двигуна підімкнено безпосередньо до живильної мережі, а ротор - через перший трифазний мостовий діодно-вентильний комплект в коло постійного струму інвертора, веденого мережею, узгоджено-послідовно, в це ж коло підімкнено другий мостовий діодно-вентильний комплект, вхід змінного струму...
Регульований асинхронний електропривід з синхронним обертанням роторів
Номер патенту: 83629
Опубліковано: 11.08.2008
Автори: Калюжний Сергій Володимирович, Шевченко Іван Степанович, Калюжний Володимир Владиславович
МПК: H02P 5/74
Мітки: сінхронним, електропривід, роторів, обертанням, регульованій, асинхронний
Формула / Реферат:
Регульований асинхронний електропривід з синхронним обертанням роторів, до складу якого входять електродвигуни, параметричне джерело струму, мостові випрямлячі та комутуючий елемент у вигляді резистора або інвертора, веденого живильною мережею, який відрізняється тим, що фазні обмотки роторів електродвигунів з'єднані між собою пофазно-паралельно та зі входом змінного струму мостового випрямляча, вихід постійного струму якого зв'язаний...
Лінійний електропривод

Номер патенту: 43207
Опубліковано: 10.08.2009
Автори: Барабаш В'ячеслав Андрійович, Смірнов Юрій Йосипович, Чернишов Сергій Іванович, Богаєнко Микола Володимирович, Попков Володимир Сергійович
МПК: B25J 9/12, H02K 41/00, H01H 31/00
Мітки: лінійний, електропривод
Формула / Реферат:
Лінійний електропривод, що має нерухому частину, яка складається зі струмового шару, обхопленого зовнішнім магнітопроводом, встановлених в корпусі, і рухому, змонтовану всередині нерухомої частини з можливістю зворотно-поступального руху, з вузлами фіксації крайніх положень, нерухомі елементи яких змонтовані на торцях корпусу, а рухомі - на рухомій частині, який відрізняється тим, що між зовнішнім магнітопроводом і корпусом встановлено...
Попередній патент: Спосіб добування вугілля із забрудненого джерела
Наступний патент: Формувач пачки імпульсів з перенастроюваною тривалістю, шпаруватістю, яка дорівнює цілому числу, і кількістю імпульсів в пачці
Випадковий патент: Добувний модуль озерних сапропелів