Спосіб калібрування інерціальних датчиків


Формула / Реферат
1. Спосіб калібрування інерціальних датчиків робочого обладнання, який включає:
збір даних від одного або більше інерціальних датчиків та від одного або більше датчиків температури, розташованих поблизу інерціальних датчиків, коли робоче обладнання не в роботі, та
оновлення моделі температурної систематичної похибки для інерціальних датчиків даними, зібраними від інерціальних датчиків та датчиків температури,
причому сенсорна підсистема, що має інерціальні датчики та датчики температури, періодично вмикається для збору даних, коли робоче обладнання не в роботі.
2. Спосіб за п. 1, який відрізняється тим, що включає визначення, чи робоче обладнання є в роботі чи ні.
3. Спосіб за п. 2, який відрізняється тим, що робоче обладнання є машиною, а визначення, чи машина в роботі чи ні, включає визначення, чи машина ввімкнена чи вимкнена.
4. Спосіб за п. 2, який відрізняється тим, що робоче обладнання є машиною, а визначення, чи машина в роботі чи ні, включає визначення, чи двигун машини працює чи ні.
5. Спосіб за п. 2, який відрізняється тим, що робоче обладнання є знімальним обладнанням, а етап визначення, чи знімальне обладнання в роботі чи ні, включає визначення, чи знімальне обладнання ввімкнене чи вимкнене.
6. Спосіб за п. 1, який відрізняється тим, що включає етап визначення, чи робоче обладнання піддається вібрації чи рухові протягом періоду, коли робоче обладнання не в роботі, та відкидання будь-яких даних, зібраних у період, коли робоче обладнання піддається вібрації чи рухові.
7. Спосіб за п. 1, який відрізняється тим, що включає оновлення моделі температурної систематичної похибки за допомогою підгонки кривої до зібраних даних та оновлення моделі температурної систематичної похибки характеристиками функції кривої.
8. Спосіб за п. 1, який відрізняється тим, що оновлення моделі температурної систематичної похибки включає оцінку значимості даних, зібраних в одному циклі, коли робоче обладнання не в роботі, порівняно з попередніми даними, зібраними в попередніх циклах, коли робоче обладнання не було в роботі, та надання більшої ваги даним, зібраним у більш недавніх циклах.
9. Спосіб за п. 3 або п. 5, який відрізняється тим, що збір даних відкладено на попередньо заданий час після вимикання робочого обладнання.
10. Інерціальний вимірювальний пристрій, що включає: сенсорну підсистему, що має:
один або більше інерціальних датчиків,
один або більше датчиків температури, пов'язаних з інерціальними датчиками, та
малопотужний модуль вибірки, здатний збирати дані з інерціальних датчиків та датчиків температури,
модуль обробки з пам'яттю, в якій зберігається модель температурної систематичної похибки для інерціальних датчиків, та
силовий контролер, налаштований на вибіркове вмикання сенсорної підсистеми для збирання даних від інерціальних датчиків та датчиків температури, коли робоче обладнання, в якому встановлений інерціальний вимірювальний пристрій, не в роботі.
11. Інерціальний вимірювальний пристрій за п. 10, який відрізняється тим, що включає годинник, котрий використовується силовим контролером для періодичного вмикання сенсорної підсистеми протягом періоду, коли робоче обладнання не в роботі.
12. Інерціальний вимірювальний пристрій за п. 10, який відрізняється тим, що малопотужний модуль вибірки включає малопотужний процесор, а модуль обробки включає головний процесор, який має відносно вище енергоспоживання, ніж малопотужний процесор.
13. Інерціальний вимірювальний пристрій за п. 10, який відрізняється тим, що інерціальний вимірювальний пристрій налаштований на затримку збору даних від інерціальних датчиків та датчиків температури на попередньо заданий час після вимикання робочого обладнання.
Текст
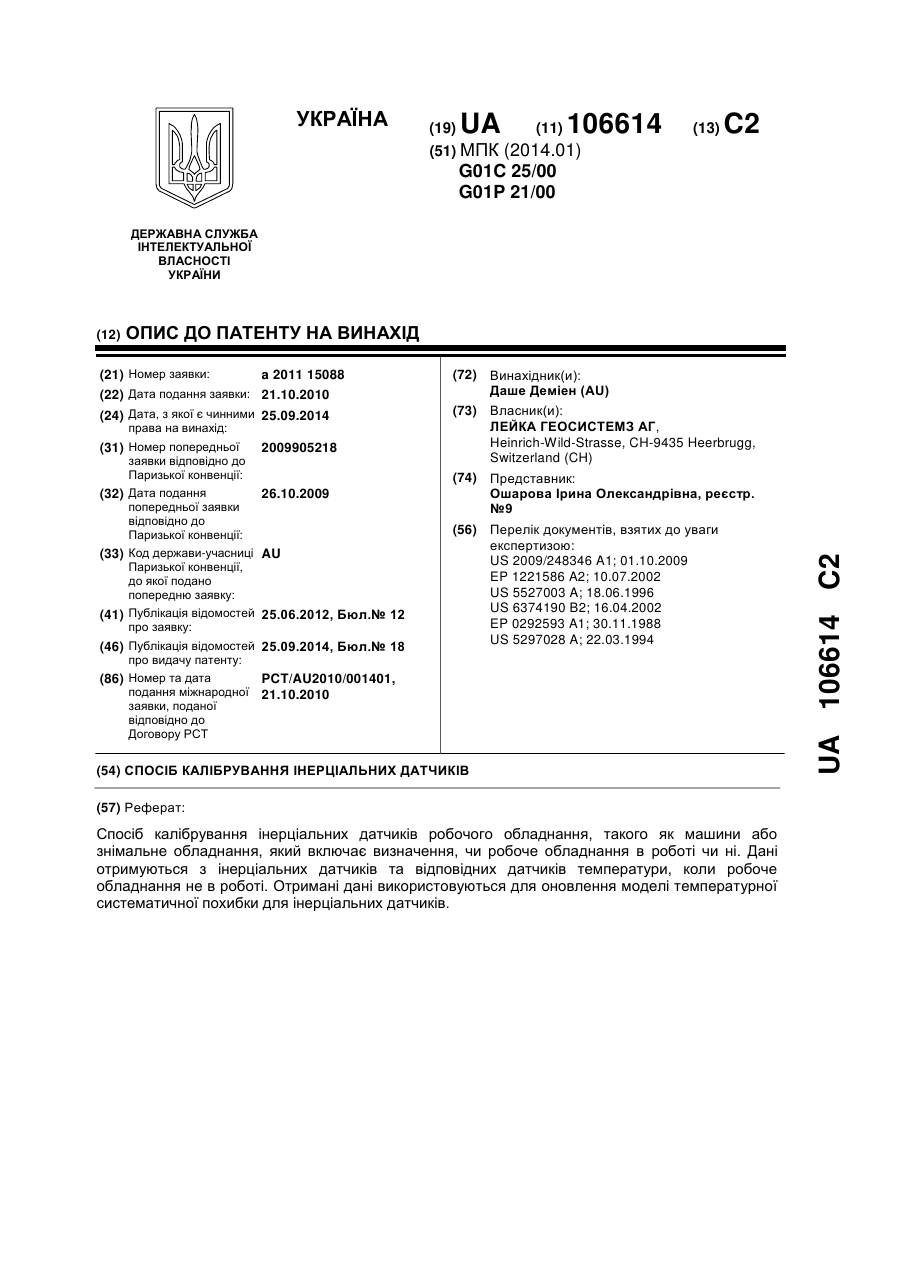
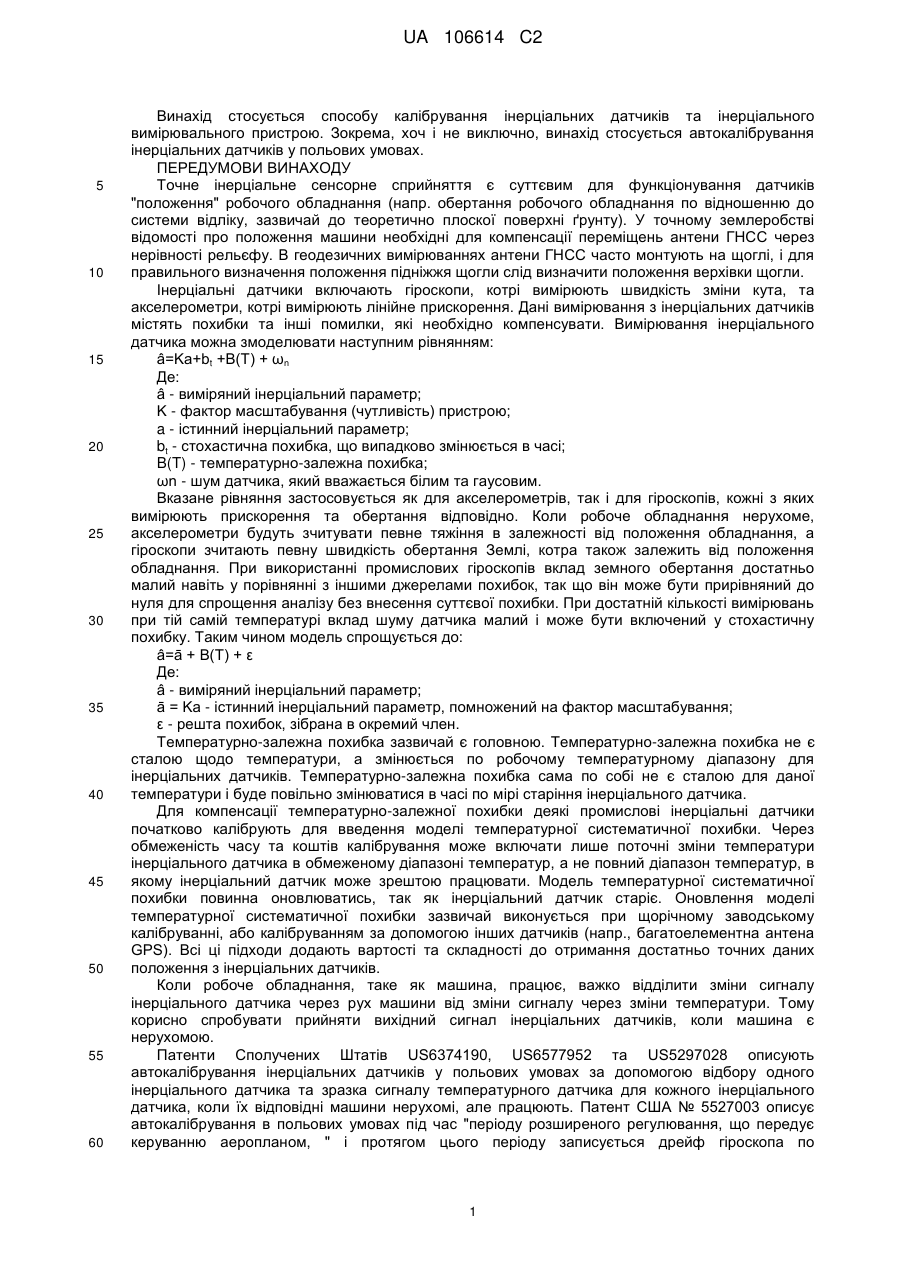
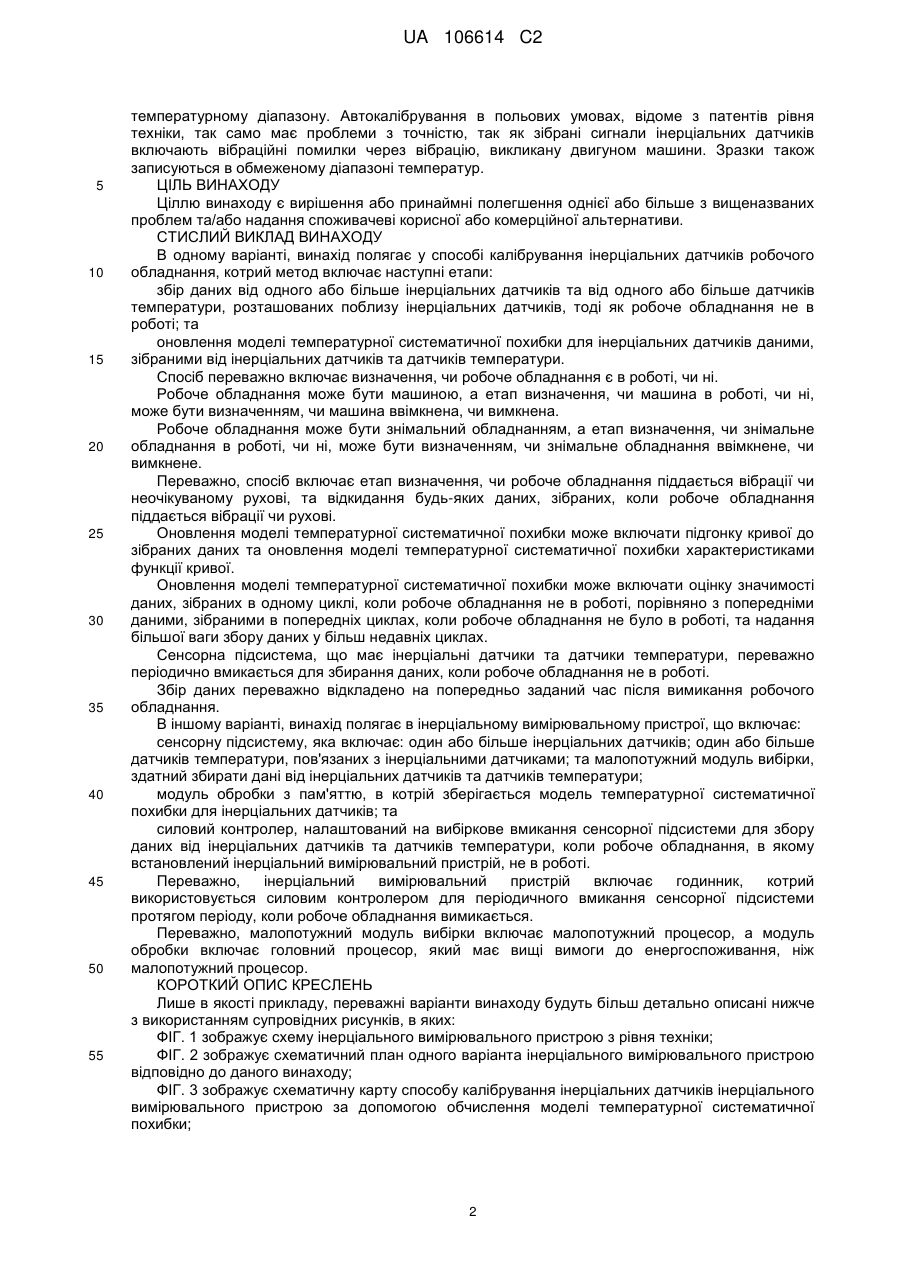
Реферат: Спосіб калібрування інерціальних датчиків робочого обладнання, такого як машини або знімальне обладнання, який включає визначення, чи робоче обладнання в роботі чи ні. Дані отримуються з інерціальних датчиків та відповідних датчиків температури, коли робоче обладнання не в роботі. Отримані дані використовуються для оновлення моделі температурної систематичної похибки для інерціальних датчиків. UA 106614 C2 (12) UA 106614 C2 UA 106614 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід стосується способу калібрування інерціальних датчиків та інерціального вимірювального пристрою. Зокрема, хоч і не виключно, винахід стосується автокалібрування інерціальних датчиків у польових умовах. ПЕРЕДУМОВИ ВИНАХОДУ Точне інерціальне сенсорне сприйняття є суттєвим для функціонування датчиків "положення" робочого обладнання (напр. обертання робочого обладнання по відношенню до системи відліку, зазвичай до теоретично плоскої поверхні ґрунту). У точному землеробстві відомості про положення машини необхідні для компенсації переміщень антени ГНСС через нерівності рельєфу. В геодезичних вимірюваннях антени ГНСС часто монтують на щоглі, і для правильного визначення положення підніжжя щогли слід визначити положення верхівки щогли. Інерціальні датчики включають гіроскопи, котрі вимірюють швидкість зміни кута, та акселерометри, котрі вимірюють лінійне прискорення. Дані вимірювання з інерціальних датчиків містять похибки та інші помилки, які необхідно компенсувати. Вимірювання інерціального датчика можна змоделювати наступним рівнянням: â=Ka+bt +Β(Τ) + ωn Де: â - виміряний інерціальний параметр; Κ - фактор масштабування (чутливість) пристрою; a - істинний інерціальний параметр; bt - стохастична похибка, що випадково змінюється в часі; B(T) - температурно-залежна похибка; ωn - шум датчика, який вважається білим та гаусовим. Вказане рівняння застосовується як для акселерометрів, так і для гіроскопів, кожні з яких вимірюють прискорення та обертання відповідно. Коли робоче обладнання нерухоме, акселерометри будуть зчитувати певне тяжіння в залежності від положення обладнання, а гіроскопи зчитають певну швидкість обертання Землі, котра також залежить від положення обладнання. При використанні промислових гіроскопів вклад земного обертання достатньо малий навіть у порівнянні з іншими джерелами похибок, так що він може бути прирівняний до нуля для спрощення аналізу без внесення суттєвої похибки. При достатній кількості вимірювань при тій самій температурі вклад шуму датчика малий і може бути включений у стохастичну похибку. Таким чином модель спрощується до: â=ā + B(T) + ε Де: â - виміряний інерціальний параметр; ā = Κa - істинний інерціальний параметр, помножений на фактор масштабування; ε - решта похибок, зібрана в окремий член. Температурно-залежна похибка зазвичай є головною. Температурно-залежна похибка не є сталою щодо температури, а змінюється по робочому температурному діапазону для інерціальних датчиків. Температурно-залежна похибка сама по собі не є сталою для даної температури і буде повільно змінюватися в часі по мірі старіння інерціального датчика. Для компенсації температурно-залежної похибки деякі промислові інерціальні датчики початково калібрують для введення моделі температурної систематичної похибки. Через обмеженість часу та коштів калібрування може включати лише поточні зміни температури інерціального датчика в обмеженому діапазоні температур, а не повний діапазон температур, в якому інерціальний датчик може зрештою працювати. Модель температурної систематичної похибки повинна оновлюватись, так як інерціальний датчик старіє. Оновлення моделі температурної систематичної похибки зазвичай виконується при щорічному заводському калібруванні, або калібруванням за допомогою інших датчиків (напр., багатоелементна антена GPS). Всі ці підходи додають вартості та складності до отримання достатньо точних даних положення з інерціальних датчиків. Коли робоче обладнання, таке як машина, працює, важко відділити зміни сигналу інерціального датчика через рух машини від зміни сигналу через зміни температури. Тому корисно спробувати прийняти вихідний сигнал інерціальних датчиків, коли машина є нерухомою. Патенти Сполучених Штатів US6374190, US6577952 та US5297028 описують автокалібрування інерціальних датчиків у польових умовах за допомогою відбору одного інерціального датчика та зразка сигналу температурного датчика для кожного інерціального датчика, коли їх відповідні машини нерухомі, але працюють. Патент США № 5527003 описує автокалібрування в польових умовах під час "періоду розширеного регулювання, що передує керуванню аеропланом, " і протягом цього періоду записується дрейф гіроскопа по 1 UA 106614 C2 5 10 15 20 25 30 35 40 45 50 55 температурному діапазону. Автокалібрування в польових умовах, відоме з патентів рівня техніки, так само має проблеми з точністю, так як зібрані сигнали інерціальних датчиків включають вібраційні помилки через вібрацію, викликану двигуном машини. Зразки також записуються в обмеженому діапазоні температур. ЦІЛЬ ВИНАХОДУ Ціллю винаходу є вирішення або принаймні полегшення однієї або більше з вищеназваних проблем та/або надання споживачеві корисної або комерційної альтернативи. СТИСЛИЙ ВИКЛАД ВИНАХОДУ В одному варіанті, винахід полягає у способі калібрування інерціальних датчиків робочого обладнання, котрий метод включає наступні етапи: збір даних від одного або більше інерціальних датчиків та від одного або більше датчиків температури, розташованих поблизу інерціальних датчиків, тоді як робоче обладнання не в роботі; та оновлення моделі температурної систематичної похибки для інерціальних датчиків даними, зібраними від інерціальних датчиків та датчиків температури. Спосіб переважно включає визначення, чи робоче обладнання є в роботі, чи ні. Робоче обладнання може бути машиною, а етап визначення, чи машина в роботі, чи ні, може бути визначенням, чи машина ввімкнена, чи вимкнена. Робоче обладнання може бути знімальний обладнанням, а етап визначення, чи знімальне обладнання в роботі, чи ні, може бути визначенням, чи знімальне обладнання ввімкнене, чи вимкнене. Переважно, спосіб включає етап визначення, чи робоче обладнання піддається вібрації чи неочікуваному рухові, та відкидання будь-яких даних, зібраних, коли робоче обладнання піддається вібрації чи рухові. Оновлення моделі температурної систематичної похибки може включати підгонку кривої до зібраних даних та оновлення моделі температурної систематичної похибки характеристиками функції кривої. Оновлення моделі температурної систематичної похибки може включати оцінку значимості даних, зібраних в одному циклі, коли робоче обладнання не в роботі, порівняно з попередніми даними, зібраними в попередніх циклах, коли робоче обладнання не було в роботі, та надання більшої ваги збору даних у більш недавніх циклах. Сенсорна підсистема, що має інерціальні датчики та датчики температури, переважно періодично вмикається для збирання даних, коли робоче обладнання не в роботі. Збір даних переважно відкладено на попередньо заданий час після вимикання робочого обладнання. В іншому варіанті, винахід полягає в інерціальному вимірювальному пристрої, що включає: сенсорну підсистему, яка включає: один або більше інерціальних датчиків; один або більше датчиків температури, пов'язаних з інерціальними датчиками; та малопотужний модуль вибірки, здатний збирати дані від інерціальних датчиків та датчиків температури; модуль обробки з пам'яттю, в котрій зберігається модель температурної систематичної похибки для інерціальних датчиків; та силовий контролер, налаштований на вибіркове вмикання сенсорної підсистеми для збору даних від інерціальних датчиків та датчиків температури, коли робоче обладнання, в якому встановлений інерціальний вимірювальний пристрій, не в роботі. Переважно, інерціальний вимірювальний пристрій включає годинник, котрий використовується силовим контролером для періодичного вмикання сенсорної підсистеми протягом періоду, коли робоче обладнання вимикається. Переважно, малопотужний модуль вибірки включає малопотужний процесор, а модуль обробки включає головний процесор, який має вищі вимоги до енергоспоживання, ніж малопотужний процесор. КОРОТКИЙ ОПИС КРЕСЛЕНЬ Лише в якості прикладу, переважні варіанти винаходу будуть більш детально описані нижче з використанням супровідних рисунків, в яких: ФІГ. 1 зображує схему інерціального вимірювального пристрою з рівня техніки; ФІГ. 2 зображує схематичний план одного варіанта інерціального вимірювального пристрою відповідно до даного винаходу; ФІГ. 3 зображує схематичну карту способу калібрування інерціальних датчиків інерціального вимірювального пристрою за допомогою обчислення моделі температурної систематичної похибки; 2 UA 106614 C2 5 10 15 20 25 30 35 40 45 50 55 60 ФІГ. 4 зображує графік температури від часу для температури інерціального датчика під час стадії охолодження, коли інерціальний датчик охолоджується від робочої температури до температури середовища; ФІГ. 5 зображує графік температури від часу для температури інерціального датчика під час стадії зміни температури середовища, під час якої температура середовища змінюється; ФІГ. 6 зображує модель температурної систематичної похибки для інерціального вимірювального пристрою з ФІГ. 2, показану як крива температурної похибки; та ФІГ. 7 зображує частини кривої температурної похибки, захоплені в режимі вибірки інерціального вимірювального пристрою з ФІГ. 2. ДЕТАЛЬНИЙ ОПИС КРЕСЛЕНЬ Згідно ФІГ. 1, інерціальний вимірювальний пристрій з рівня техніки 1 включає один або більше інерціальних датчиків 2, модуль обробки 3 та силовий контролер 4, що контролює живлення модуля обробки 3 та інерціальних датчиків 2. Модуль обробки 3 включає процесор 6 та пам'ять 7. Модель температурної систематичної похибки зберігається в пам'яті 7 для кожного інерціального датчика 2. Модуль обробки 3 здатен обчислювати положення машини, використовуючи дані з інерціальних датчиків, скориговані за допомогою моделі температурної систематичної похибки. Згідно ФІГ. 2, показана схема інерціального вимірювального пристрою (ІВП) 10 у відповідності з одним варіантом винаходу. ІВП 10 включає, загалом, силовий контролер 12, інерціальні сенсорні пристрої 14, малопотужний модуль вибірки 16, модуль обробки 18 та годинник 20. Інерціальні сенсорні пристрої 14 та модуль вибірки 16 разом складають сенсорну підсистему 22. ІВП 10 описується у зв'язку з його робочим взаємозв'язком з машиною, в якій він установлений, але так само він може бути встановлений у будь-яке робоче обладнання, що використовує інерціальні датчики, таке як знімальне обладнання. Силовий контролер 12 контролює подачу живлення до інерціальних сенсорних пристроїв 14, малопотужного модуля вибірки 16 та модуля обробки 18. Силовий контролер 12 здатен незалежно вмикати сенсорну підсистему 22 та модуль обробки 18. Силовий контролер 12 налаштований на одночасне ввімкнення сенсорної підсистеми 22 та модуля обробки 18 в режимі вимірювання ІВП 10, коли машина виводиться з роботи. Машина вважається в роботі, коли вона ввімкнена. Силовий контролер 12 налаштований на вибіркове вмикання сенсорної підсистеми 22 в режимі вибірки ІВП 10, коли машина не в роботі. Машина вважається виведеною з роботи, коли вона вимкнена, і в роботі, коли вона ввімкнена. Силовий контролер 12 визначає, чи машина ввімкнена, чи вимкнена, через з'єднання з перемикачем запалювання машини. Період, протягом якого машина вимикається, а потім вмикається, вважається циклом. Машина здебільшого має фіксоване положення і не має вібрації протягом кожного циклу. Інерціальні сенсорні пристрої 14 мають вбудовані датчики температури 24. Як альтернатива, не показана на кресленнях, датчики температури 24 не вбудовані в інерціальні сенсорні пристрої 14, а розташовані поблизу інерціальних сенсорних пристроїв 14. Інерціальні сенсорні пристрої 14 включають інерціальні датчики 26 у вигляді гіроскопів або акселерометрів. Інерціальні сенсорні пристрої 14 видають температурні сигнали з датчиків температури 24 та інерціальні сигнали з інерціальних датчиків 26. Сигнали з інерціальних сенсорних пристроїв 14 подаються до модуля вибірки 16. Модуль вибірки 16 включає малопотужний процесор 30, пам'ять 31 та пам'ять даних 32. Малопотужний процесор 30 є малопотужним пристроєм, таким як мікроконтролер. Дані сигналів з інерціальних датчиків 14 збираються і зберігаються в пам'яті даних 32 в режимі вибірки ІВП 10. Модуль вибірки 16 сполучений з годинником 20, так що дані, що збираються, отримують мітку часу при збереженні в пам'ять 32. Пам'ять даних 32 має таблицю температура-похибка, в якій зберігаються відібрані дані сигналу інерціального датчика та дані температури для кожного інерціального датчика 26 для кожного циклу. Сигнали з інерціальних сенсорних пристроїв 14 перемикаються на модуль обробки 18 через модуль вибірки 16 в режимі вимірювання ІВП 10. Модуль обробки 18 включає головний процесор 34, пам'ять 36 та пам'ять даних 38. Модель температурної систематичної похибки зберігається в пам'яті 36 для кожного інерціального датчика 26. Модель температурної систематичної похибки обчислюється головним процесором 34 з використанням серій даних сигналу інерціального датчика та температурних даних за попередній період, що зберігаються в пам'яті даних 38 для кожного інерціального датчика 26. Дані за попередній період складаються з серій даних, отриманих з пам'яті даних 32 модуля вибірки 16, як нижче описується більш детально. ФІГ. 3 зображує схематичну карту способу автокалібрування в польових умовах інерціальних датчиків 26 ІВП 10 через обчислення моделі температурної систематичної похибки. Автокалібрування інерціальних датчиків 26 у польових умовах здійснюється 3 UA 106614 C2 5 10 15 20 25 30 35 40 45 50 55 60 безпосередньо в машині. Спосіб включає спочатку визначення 40, чи машина, в якій установлений ІВП 10, в роботі, чи ні. Машина визначається як виведена з роботи, коли вона вимкнена, і в роботі, коли вона ввімкнена. Якщо машина вимкнена 42, ІВП 10 вмикається в режимі вибірки 44. В режимі вибірки 44, сенсорна підсистема 22 вмикається, а модуль обробки 18 не вмикається, як відмічено позначкою 46. Сенсорна підсистема 22 збирає дані температурного сигналу та дані інерціального сигналу з інерціальних сенсорних пристроїв 14, як відмічено позначкою 48. Зібрані дані зберігаються в пам'яті даних 32 модуля вибірки 16, як відмічено позначкою 50. Коли машина вмикається 52, ІВП 10 вмикається в режимі вимірювання 54. В режимі вимірювання сенсорна підсистема 22 ввімкнена, і модуль обробки 18 ввімкнений, як відмічено позначкою 56. Модуль обробки 18 отримує дані, збережені в пам'яті 32 модуля вибірки 16, як відмічено позначкою 58. Потім модуль обробки 18 обчислює модель температурної систематичної похибки для кожного інерціального датчика26, використовуючи дані, отримані з модуля вибірки 16, тим самим калібруючи інерціальні датчики 26 як відмічено позначкою 60. Сигнали з інерціальних сенсорних пристроїв 14 перемикаються на модуль обробки 18 та коригуються з застосуванням моделі температурної систематичної похибки, обчисленої на етапі 60, як відмічено позначкою 62. В режимі вимірювання сенсорна підсистема 22 та модуль обробки 18 вмикаються так, що сигнали інерціального сенсорного пристрою, які генеруються інерціальними датчиками 26 та датчиками температури 24, перемикаються на модуль обробки 18. Головний процесор 34 модуля обробки 18 коригує ці сигнали, застосовуючи до сигналів модель температурної систематичної похибки. Інші завдання, такі як керування та навігація, обчислення положення та взаємодія з модулем вибірки 16, також водночас виконуються головним процесором 34. Головний процесор 34 повинен бути більш потужним порівняно з малопотужним процесором 30 модуля вибірки 16, через завдання, які головний процесор 34 повинен виконувати. Через це головний процесор 34 має порівняно вищі вимоги до живлення, ніж малопотужний процесор 30. Скориговані сигнали використовуються для визначення положення машини. Кожного разу, коли ІВП 10 переходить з режиму вибірки в режим вимірювання, дані сигналу інерціального датчика та температурні дані, збережені в пам'яті даних 32 модуля вибірки 16 для кожного циклу, зчитуються модулем обробки 18 та зберігаються разом з попередньо зчитаними даними в пам'яті даних 38 модуля обробки 18. В режимі вибірки ІВП 10, сенсорна підсистема 22 вибірково вмикається, але модуль обробки 18 не вмикається. Таким чином, ІВП 10 споживає мінімальну кількість енергії в режимі вибірки. Підсистема 22 вмикається на етапі охолодження інерціальних сенсорних пристроїв 14 та періодично вмикається на етапі зміни температури середовища, який слідує за етапом охолодження. Згідно ФІГ. 4, стадія охолодження інерціального сенсорного пристрою 14 зображена, коли пристрій 14 охолоджується від робочої температури до температури середовища. Етап охолодження починається безпосередньо після вимкнення машини. Модуль вибірки 16 може відкласти збір даних на попередньо заданий час після вимикання машини для того, щоб уникнути збору даних в той час, як оператор покидає машину. Як альтернатива, дані, отримані під час виходу оператора, будуть відкинуті через вібрації, спричинені оператором, що виходить. Оператор, що виходить з машини, викликає вібрації, так що будь-які дані, зібрані в цей час, будуть неприйнятні для використання у визначенні моделі температурної систематичної похибки. Пристрої 14 загалом швидко охолоджуються від робочої температури (котра може значно перевищувати температуру середовища) до температури середовища за відносно короткий період часу. Під час етапу охолодження збір даних модулем вибірки 16 відбувається безперервно, поки не спливе заданий час, або не буде значних змін температури, зареєстрованих датчиками температури 24. Згідно ФІГ. 5, підсистема 22 періодично вмикається протягом часу, коли інерціальні сенсорні пристрої 14 піддаються флуктуаціям температури середовища. Етап зміни температури середовища буде, наприклад, тривалим часом протягом ночі, поки машина припаркована. Оскільки температура середовища змінюється з часом повільно, збір даних повинен відбуватись лише на періодичній основі. Малопотужний процесор 30 програмує годинник 20 для періодичного вмикання сенсорної підсистеми 22 через силовий контролер 12. Споживання енергії батареї машини мінімізується через періодичне вмикання підсистеми 22. Енергоспоживання малопотужного процесора 30 таке, що підсистема 22 може працювати тривалий період без значного зниження потужності батареї машини. Періоди вибірки протягом етапу зміни температури середовища позначені блоками вибірки 64 на ФІГ. 5. Вибірка протягом 4 UA 106614 C2 5 10 15 20 25 30 35 40 45 етапу зміни температури середовища особливо корисна, так як вона дозволяє збір даних у ширшому діапазоні температур, ніж той, що загалом використовується в заводському калібруванні або на етапі охолодження. Відомо, що період, протягом якого інерціальні датчики 26 прогріваються від температури середовища до робочої температури при запуску машини, є проблемним для корекції моделі температурної систематичної похибки через недостатність даних по цьому діапазону температур для розробки моделі температурної систематичної похибки. Особливо це помітно, коли температура середовища значно нижча, ніж робоча температура. Деякі машини (такі як літальні) вимагають "періоду прогрівання" перед використанням з цієї причини. Для машин, в яких оператор може не бути обізнаний, що використовуються інерціальні датчики (такі як сільськогосподарські), особливою перевагою є наявність даних для корекції моделі температурної систематичної похибки по всьому діапазону робочих температур та температур середовища, як забезпечується даним винаходом. Заявник передбачає, що в разі виявлення руху або вібрації інерціальними датчиками 26 протягом періоду вибірки, дані для цього періоду вибірки будуть відкинуті, а підсистема 22 тимчасово вимкнена. Вибірка протягом кожного циклу, коли машина не в роботі, створює окрему серію зібраних даних, що зберігаються в пам'яті 32 модуля вибірки 16. Згідно ФІГ. 6, модель температурної систематичної похибки, що зберігається в пам'яті 36 модуля обробки 18 для кожного інерціального датчика 26, зображена як крива температурної похибки. Кожен інерціальний датчик 26 буде мати окрему криву температурної похибки і таким чином дані з інерціальних сенсорних пристроїв 14 збираються незалежно для кожного інерціального датчика 26. Згідно ФІГ. 7, дані для частин кривої температурної похибки збираються кожного разу, коли ІВП 10 знаходиться в режимі вибірки. Кожного разу, коли машина паркується під різними кутами в різних циклах, дані, виміряні для акселерометра протягом вибірки, будуть зсунуті від істинної похибки. Це позначено як інтервал "Поправка на тяжіння" на графіку, зображеному на ФІГ. 7. Протягом різних періодів збору даних, коли ІВП 10 знаходиться в режимі вибірки, різні відрізки кривої температурної похибки майже напевне будуть спостерігатися з різними відступами. Коли зібрано достатньо даних сигналу інерціального датчика, істинна температурна крива може бути оцінена з кількох захоплених часткових кривих температурної похибки як описано нижче: Припускається, що крива температурної похибки є многочленом порядку n. Тобто: 2 n B(T) = b0+b1T+b2T +… + bnT Перед обчисленням кривої температурної похибки порядок многочлена невідомий і має бути постульований. Як описано в розділі "Передумови винаходу", дані вимірювання інерціального датчика можуть моделюватись як: â=ā + B(T) + ε Після ряду циклів збору даних інерціальних датчиків у режимі вибірки ІВП 10, буде m серій даних інерціальних датчиків у пам'яті даних 38 модуля обробки 18. Кожна серія даних складається з (різної кількості) m k зразків температури, вимірів інерціального датчика, статистики шуму та міток часу. Оскільки інерціальний параметр буде постійний для кожної серії через фіксоване положення та відсутність вібрації машини протягом кожного циклу, кожна індивідуальна модель вимірюється як: Наприклад, 4-те вимірювання 2-ї серії буде: І формальний запис із вкладом інерціальних параметрів з інших серій вимірювань: 50 55 Оскільки всі часткові криві температурної похибки будуть мати компонент фізичного інерціального параметра (крім випадку, коли приймається, що гіроскопи вимірюють 0 як швидкість обертання Землі), абсолютне вимірювання або оцінка похибки при окремій температурі потребує обчислення параметра b0. Це досягається кількома способами, такими як: • Початкове калібрування на заводі • Послідовність попередньо заданих маневрів машини • Коли доступні всі 3 осі прискорення та обертання, похибка на кожному датчику може бути обчислена з щонайменше 6 різних положень 5 UA 106614 C2 • Додаткові датчики, такі як GPS або багатоелементна антена GPS. Оскільки в цих випадках відомі або похибка, або прискорення, при певній температурі, є i вимірювань похибки, що задовольняють наступне рівняння: 5 Після врахування вкладу від положення кожної серії часткових температурних кривих: Отже, серії вимірювань (включаючи абсолютні вимірювання) утворюють систему лінійних рівнянь: 10 15 Похибки ε можуть бути описані як нульові середні, адитивні, білі і гаусові з матрицею коваріантності Σ. Ефекти старіння інерціального датчика можуть бути враховані шляхом зростання коваріантності вимірювань на основі віку вимірювання. Коли використовується вагова статистична функція, старим вимірюванням буде надаватись менше значення, але вони все ще будуть використовуватись за відсутності більш нових вимірювань. Це буде корисно, наприклад, якщо машина піддається різким похолоданням восени. Останній запис даних у холодному діапазоні температур може не траплятись протягом кількох місяців, але все ще має значення в такій ситуації, навіть якщо є велика непевність щодо його точності. Система лінійних рівнянь може бути виражена у вигляді матриці: 6 UA 106614 C2 5 10 15 20 25 Що коротше записується як: Χβ = y Оцінки для β (і тим самим поліноміальні коефіцієнти кривої температурної похибки для кожного інерціального датчика 26) можна отримати за допомогою лінійного методу найменших квадратів. Коли поліноміальні коефіцієнти визначені, вони використовуються в моделі температурної систематичної похибки в режимі вимірювання ІВП 10 для компенсації температурної похибки інерціальних датчиків 26. Заявник передбачає, що, так як з розвитком технології енергоспоживання процесорів та пам'яті знижується, малопотужний процесор 30 може бути достатньо потужним. так що вся обробка та зберігання даних, потрібних для ІВП 10, може цілком здійснюватись модулем вибірки 16 без значного споживання потужності батареї машини в режимі вибірки. Таким чином, модуль обробки 18 буде непотрібним. Спосіб та ІВП 10 згідно даного винаходу дозволяють значною мірою самокалібрування інерціальних датчиків 26 без специфічних інструкцій користувача та без потреби в додаванні додаткових датчиків або в періодичному заводському перекалібруванні. Одним з недоліків автокалібрування в польових умовах, відомого з патентів рівня техніки, є те, що машини не вимикаються під час відбору зразків сигналу інерціального датчика для калібрування, а такі машини піддаються вібрації від їхніх двигунів та операторів. Один з виходів згідно даного винаходу полягає в зборі даних з інерціальних датчиків та відповідних датчиків температури, коли робоче обладнання не в роботі, а його двигуни, таким чином, вимкнені. Донедавна інерціальні датчики та пов'язані з ними схеми обробки потребували значної кількості електроенергії для роботи. Тому була небезпека того, що батарея машини розрядиться, якщо інерціальні датчики та пов'язані з ними схеми обробки працюватимуть, коли машина буде вимкнена. Успіхи в технології датчиків та вбудованих обчислень знизили енергоспоживання достатньо, щоб дозволити роботу сенсорної підсистеми 22, коли машина припаркована та нерухома, як описувалось вище за допомогою креслень. Утримування модуля обробки 18 (який має відносно високе енергоспоживання) вимкненим в режимі вибірки та лише вибіркове вмикання модуля вибірки (який має відносно низьке енергоспоживання) в режимі вибірки дає можливість ІВП 10 працювати без суттєвого розрядження батареї машини. 7 UA 106614 C2 5 10 Вищенаведений опис різних варіантів даного винаходу надано з описовою метою для фахівця в даній галузі техніки. Цей опис не слід вважати виключним або таким, що обмежує винахід одним викладеним варіантом. Як відзначалося вище, численні альтернативи та варіанти даного винаходу будуть очевидні фахівцям з рівня техніки, з вищенаведеного викладу. Наприклад, хоча окремий опис пояснює використання ІВП 10 в зв'язку з машиною, ІВП 10 так само може використовуватися з іншим робочим обладнанням, що використовує інерціальні датчики, таким як наземне знімальне обладнання ГНСС, застосування для визначення положення інструменту, коли вимірюється положення рухомого інструменту відносно машини (такого як ніж бульдозера відносно тягача бульдозера), інерціальні навігаційні системи (INS) або інтегровані навігаційні системи GPS/INS, та роботи, зокрема промислові роботи. Відповідно, тоді як деякі альтернативні варіанти були обумовлені окремо, інші варіанти будуть очевидні або порівняно легко розроблені фахівцями з рівня техніки. Відповідно, даний винахід вважається таким, що охоплює всі альтернативи, модифікації та варіанти даного винаходу, що були обговорені тут, та інші варіанти, що потрапляють в межі суті та обсягу вищеописаного винаходу. 15 ФОРМУЛА ВИНАХОДУ 20 25 30 35 40 45 50 55 60 1. Спосіб калібрування інерціальних датчиків робочого обладнання, який включає: збір даних від одного або більше інерціальних датчиків та від одного або більше датчиків температури, розташованих поблизу інерціальних датчиків, коли робоче обладнання не в роботі, та оновлення моделі температурної систематичної похибки для інерціальних датчиків даними, зібраними від інерціальних датчиків та датчиків температури, причому сенсорна підсистема, що має інерціальні датчики та датчики температури, періодично вмикається для збору даних, коли робоче обладнання не в роботі. 2. Спосіб за п. 1, який відрізняється тим, що включає визначення, чи робоче обладнання є в роботі чи ні. 3. Спосіб за п. 2, який відрізняється тим, що робоче обладнання є машиною, а визначення, чи машина в роботі чи ні, включає визначення, чи машина ввімкнена чи вимкнена. 4. Спосіб за п. 2, який відрізняється тим, що робоче обладнання є машиною, а визначення, чи машина в роботі чи ні, включає визначення, чи двигун машини працює чи ні. 5. Спосіб за п. 2, який відрізняється тим, що робоче обладнання є знімальним обладнанням, а етап визначення, чи знімальне обладнання в роботі чи ні, включає визначення, чи знімальне обладнання ввімкнене чи вимкнене. 6. Спосіб за п. 1, який відрізняється тим, що включає етап визначення, чи робоче обладнання піддається вібрації чи рухові протягом періоду, коли робоче обладнання не в роботі, та відкидання будь-яких даних, зібраних у період, коли робоче обладнання піддається вібрації чи рухові. 7. Спосіб за п. 1, який відрізняється тим, що включає оновлення моделі температурної систематичної похибки за допомогою підгонки кривої до зібраних даних та оновлення моделі температурної систематичної похибки характеристиками функції кривої. 8. Спосіб за п. 1, який відрізняється тим, що оновлення моделі температурної систематичної похибки включає оцінку значимості даних, зібраних в одному циклі, коли робоче обладнання не в роботі, порівняно з попередніми даними, зібраними в попередніх циклах, коли робоче обладнання не було в роботі, та надання більшої ваги даним, зібраним у більш недавніх циклах. 9. Спосіб за п. 3 або п. 5, який відрізняється тим, що збір даних відкладено на попередньо заданий час після вимикання робочого обладнання. 10. Інерціальний вимірювальний пристрій, що включає: сенсорну підсистему, що має: один або більше інерціальних датчиків, один або більше датчиків температури, пов'язаних з інерціальними датчиками, та малопотужний модуль вибірки, здатний збирати дані з інерціальних датчиків та датчиків температури, модуль обробки з пам'яттю, в якій зберігається модель температурної систематичної похибки для інерціальних датчиків, та силовий контролер, налаштований на вибіркове вмикання сенсорної підсистеми для збирання даних від інерціальних датчиків та датчиків температури, коли робоче обладнання, в якому встановлений інерціальний вимірювальний пристрій, не в роботі. 11. Інерціальний вимірювальний пристрій за п. 10, який відрізняється тим, що включає годинник, котрий використовується силовим контролером для періодичного вмикання сенсорної підсистеми протягом періоду, коли робоче обладнання не в роботі. 8 UA 106614 C2 5 12. Інерціальний вимірювальний пристрій за п. 10, який відрізняється тим, що малопотужний модуль вибірки включає малопотужний процесор, а модуль обробки включає головний процесор, який має відносно вище енергоспоживання, ніж малопотужний процесор. 13. Інерціальний вимірювальний пристрій за п. 10, який відрізняється тим, що інерціальний вимірювальний пристрій налаштований на затримку збору даних від інерціальних датчиків та датчиків температури на попередньо заданий час після вимикання робочого обладнання. 9 UA 106614 C2 10 UA 106614 C2 Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
Назва патенту англійськоюA method of calibrating inertial sensors
Автори англійськоюDusha, Damien
Автори російськоюДаше Демиен
МПК / Мітки
МПК: G01C 25/00, G01P 21/00
Мітки: інерціальних, датчиків, спосіб, калібрування
Код посилання
<a href="https://ua.patents.su/13-106614-sposib-kalibruvannya-inercialnikh-datchikiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб калібрування інерціальних датчиків</a>
Безплатформний навігаційний комплекс з інерціальною системою орієнтації на “грубих” чутливих елементах і спосіб корекції його інерціальних датчиків
Номер патенту: 103858
Опубліковано: 25.11.2013
Автори: Греков Олександр Миколайович, Алексеев Сергій Юрійович, Греков Миколай Олександрович
МПК: G01C 23/00
Мітки: інерціальних, інерціальною, чутливих, системою, комплекс, корекції, датчиків, орієнтації, грубих, безплатформний, навігаційний, елементах, спосіб
Формула / Реферат:
1. Безплатформний навігаційний комплекс з інерціальною системою орієнтації на "грубих" чутливих елементах, яка підключена до обчислювальної платформи і містить розташовані за трьома ортогональними осями три акселерометри і три датчики кутових швидкостей, який відрізняється тим, що він додатково містить підключені до обчислювальної платформи трьохосьовий магнітний компас і гідростатичний блок нахилу, що містить три диференціальних...
Спосіб калібрування датчиків температури
Номер патенту: 72054
Опубліковано: 10.08.2012
Автори: Сипко Микола Іванович, Іващенко Олексій Миколайович, Шварц Марина Михайлівна, Копко Дмитро Петрович, Шварц Юрій Михайлович
МПК: G01K 15/00
Мітки: калібрування, датчиків, температури, спосіб
Формула / Реферат:
Спосіб високоточного калібрування взаємозамінних датчиків температури, який включає встановлення та стабілізацію заданої температури в кріостаті або термостаті, вимірювання вихідного сигналу термометра - падіння напруги при постійному прямому струмі в точках робочого діапазону температур, розрахунок термометричних характеристик з використанням кубічних сплайнів з вільними вузлами, який відрізняється тим, що вимірювання вихідного сигналу...
Спосіб калібрування та повірки силовимірювальних датчиків у системі контролю натягу армоканатів
Номер патенту: 31547
Опубліковано: 15.12.2000
Автори: Абарбарчук Ігор Азарович, Орлов Валерій Олександрович, Браз Вадим Давидович, Нікітінський Михайло Павлович
МПК: G01L 1/22
Мітки: натягу, датчиків, повірки, системі, силовимірювальних, контролю, калібрування, спосіб, армоканатів
Текст:
...Індуктованих показань силовимірювального датчика , що ка лібрують та зразкових засобів вимірювань під час впливу на них з £ даних зусиль, провести точне масштабування апаратури Індикації СІ ловимірювальних датчиків, що калібрують, яке надає їм можливість з необхідною точністю постійно визначати натяг армоканату . Новина способу полягас у створенні таких вихідних умов для п чатку вимірювань, зв'язаних з особливостями вбудови...
Спосіб градуювання датчиків температури
Номер патенту: 29475
Опубліковано: 10.01.2008
Автори: Іващенко Олексій Миколайович, Шварц Юрій Михайлович
МПК: G01K 15/00
Мітки: градуювання, спосіб, температури, датчиків
Формула / Реферат:
Спосіб градуювання датчиків температури, який полягає у визначенні індивідуальної градуювальної характеристики шляхом вимірювання величини електричного вихідного сигналу градуйованого датчика в не менше ніж двох температурних точках , де
Спосіб вимірювання температури з застосуванням напівпровідникових датчиків, що мають p-n переходи
Номер патенту: 31120
Опубліковано: 15.12.2000
Автори: Сташук Вадим Данилович, Плюта Ігор Васильович, Рибчак Володимир Костянтинович
МПК: G01K 7/01
Мітки: вимірювання, датчиків, переході, спосіб, застосуванням, напівпровідникових, температури, мають
Текст:
.../2 . При цьому на р-п - переході формується імпульсна напруга, амплітуда якої дорівнює Vm = К, - V2 > яка згідно з (2) пропорційна температурі Т. Отже, для калібрування датчика достатньо виміряти амплітуду напруги на р-п - переході при одному опорному значенні температури Го , наприклад, взятому посередині діапазону вимірюваних температур,, щоб визначити коефіцієнт пропорційності між амплітудою вихідної напруги датчика і вимірюваною...
Попередній патент: Сферичні блоки для унітаза, спосіб їх виготовлення і підвісні контейнери зі сферичними блоками для унітаза
Наступний патент: Компактна система інерційного розділення газорідинних сумішей
Випадковий патент: Пристрій для заряду акумуляторної батареї