Спосіб калібрування та повірки силовимірювальних датчиків у системі контролю натягу армоканатів
Номер патенту: 31547
Опубліковано: 15.12.2000
Автори: Браз Вадим Давидович, Абарбарчук Ігор Азарович, Орлов Валерій Олександрович, Нікітінський Михайло Павлович
Текст
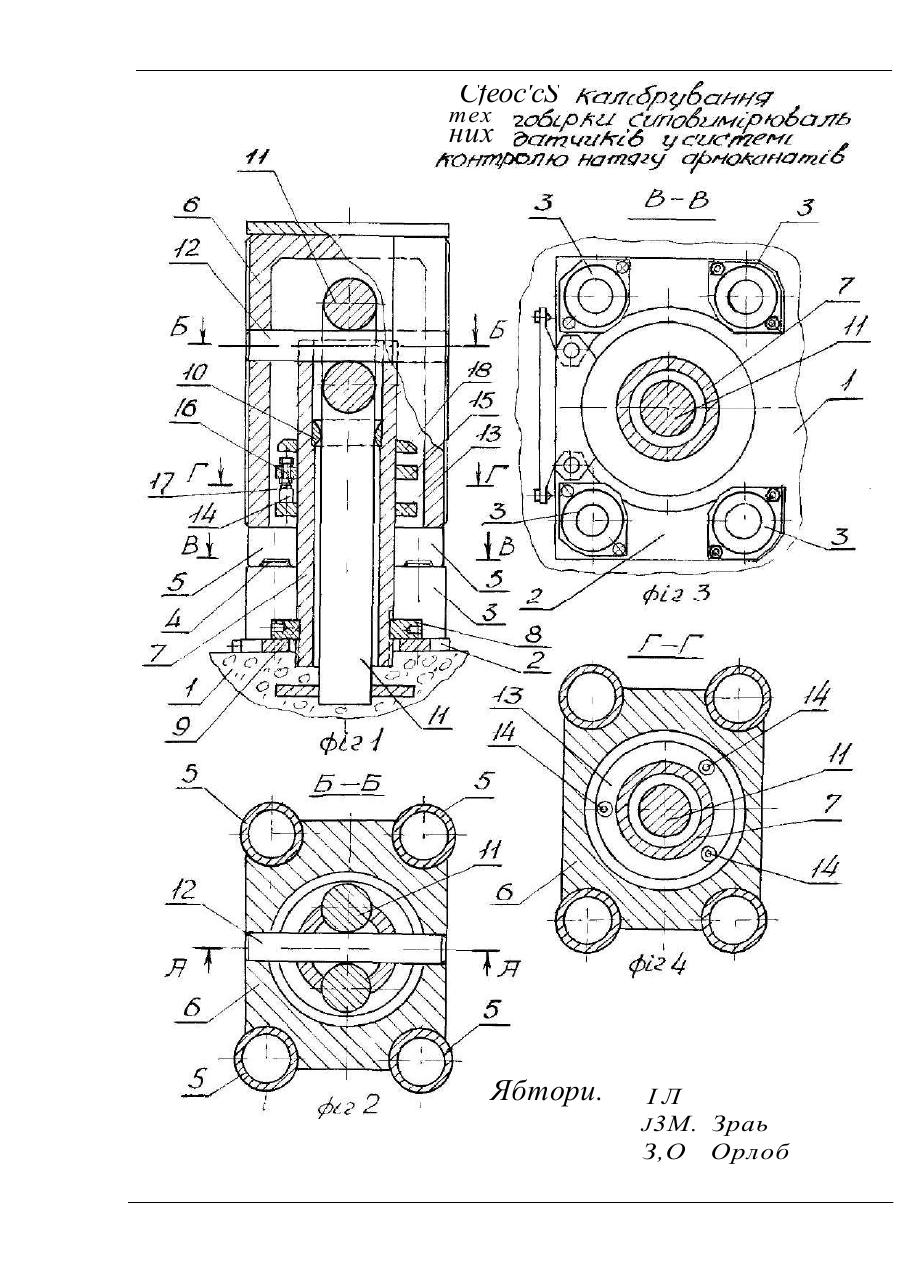
G 01 I 1/22 СПОСІБ КАЛІБРУВАННЯ ТА ПОВІРКИ СИЛОВИМІРЮВАЛЬНИХ ^ ДАТЧИКІВ У СИСТЕМІ КОНТРОЛЮ НАТЯГУ АРМОКАНАТІВ Винахід належить до силовимірювальної техніки І може бути використаний для калібрування та повірки датчиків сили , які здійснюють контроль зусиль натягу армоканатів захисних оболонок енер гоблоків атомних електростанцій . ВІДОМІ способи калібрування та повірки силовимірювальних дат чиків, при яких за допомогою вузла силовведення створюють необ хідне зусилля для впливу на силовимірювальний датчик , який калібрують І порівнюють його показання з показаннями зразкового засобу вимірювання (див. наприклад, спосіб та пристрій для калібрування І повірки датчиків сили по патенту США № 4848478 - прототип) Даний спосіб створення значних зусиль , які впливають на датчик, що калібрують, передбачає використання вузла силовведення з вбудованою клиновою парою з великим передавальним відношенням,яка зв'язана з зразковими вантажами, що призначені для порівняння їх маси з показаннями датчика , що калібрують. Недоліком цього способу є зниження точності та надійності ви мірювань зв'язане з тим, що вузол силовведення, який використовують для створення необхідного зусилля , яке впливає на датчик, що калібрують, є конструктивно складним І потребує прецізійної техно логії для його виконання, що знижує точність та надійність каліб рування Із-за можливої деформації елементів вузла силовведення підз час прикладення великих зусиль . Метою даного винаходу є підвищення точності та надійності ви мірювань при калібруванні та повірці силовимірювальних датчиків , -2які використовують для визначення зусиль натягу армоканатів за хисних оболонок енергоблоків атомних електростанцій . До основи винаходу покладено завдання створення способу калібрування та повірки силовимірювальних датчиків , які використовують у системі контролю зусиль натягу армоканатів , який дозволяє підвищити точність та надійність вимірювань за рахунок того , що при калібруванні датчиків створюють необхідні ВИХІДНІ умови початку вимірювання, порівнюють ВІДПОВІДНІ ІндуктованІ показання датчиків, що калібрують з показаннями зразкових засобів вимірювань під час впливу на них заданим зусиллям , масштабують апаратуру Індикації , калібрують робочі силовимірювальні датчики , постійно фік сують натяг армоканатів. Поставлене завдання вирішується тим, що у ВІДПОВІДНОСТІ З запропонованим способом, який включає створення необхідних зусиль для впливу на датчики, що калібрують, порівняння одержаних Індук тованих показань датчиків , що калібрують з Індуктованими показан нями зразкових засобів вимірювань , - силоввідними елементами ств ( рюють на силовимірювальні датчики , що калібрують тиск рівний мак * мальному зусиллю Рмакс.дат., на які вони розраховані І фіксують його значення апаратурою Індикації та реєстрації силовимірювальн датчиків, що калібрують, за допомогою механізму силовведення (до крата) напружують армоканат зусиллям , при досягненні якого відбу ваеться відрив від нерухомої опори настановної запобіжної гайки яка фіксує на ній положення шунтуючого елементу І натяг розташоЕ ного у ньому армоканата, апаратурою Індикації зразкового засобу вимірювання (контрольної платформи з високоточними силовимірювал ними датчиками) фіксують значення фактичного зусилля натягу арм -3канату Рфакт.арм., настановною запобіжною гайкою фіксують положен ня шунтуючого елементу на нерухомій опорі І натяг розташованого у ньому армоканата, напружують домкратом армоканат зусиллям Рмакс.а яке регламентується технічною документацією , фіксують його значен ня апаратурою Індикації І реєстрації зразкового засобу вимірюван ня, настановною запобіжною гайкою фіксують положення на нерухомій опорі шунтуючого елементу та зусилля натягу розташованого у ньому армоканата, стабілізують показання силовимірювальних датчи ків, що калібрують, встановлюють нульове значення впливаючого на них зусилля Рнул.дат., яке є початковим значенням зусилля, яке сприймається силовимірювальними датчиками, що калібрують під ча їх подальшого масштабування І фіксують його апаратурою Індикації силовимірювальних датчиків, що калібрують, після цього поступово розвантажуючи домкрат, навантажують силовимірювальну систему І фіксують значення зусиль по точках , які регламентуються норматиЕ ними документами,;ВІДПОВІДНО Рнул.дат., 20% Рмакс.дат., 40% Рма* дат., 60% Влакс.дат., 80% Рмакс.дат., Ьдакс.дат.),( при цьому пс мірі зменьшення зусилля , яке створюється донкратом , силовимірюв.1 ні датчики, що калібрують навантажуються), при цьому проводять масштабування апаратури Індикації силовимірювальної системи , та адекватно порівнюють показання апаратури Індикації зразкового з собу вимірювання І апаратури Індикації силовимірювальних датчик що калібрують, - проводять настроювання І калібрування силовимі вальних датчиків, які постійно визначають натягнення армоканатз Технічним результатом способу є підвищення точності та HaflJ ності вимірювань під час калібрування силовимірювальних датчик ^ за рахунок того, що у процесі калібрування датчиків створюють -4умови початку вимірювання, які дозволяють послідовним порівнянням Індуктованих показань силовимірювального датчика , що ка лібрують та зразкових засобів вимірювань під час впливу на них з £ даних зусиль, провести точне масштабування апаратури Індикації СІ ловимірювальних датчиків, що калібрують, яке надає їм можливість з необхідною точністю постійно визначати натяг армоканату . Новина способу полягас у створенні таких вихідних умов для п чатку вимірювань, зв'язаних з особливостями вбудови силовимірю вальних датчиків, що калібрують в силовимірювальний комплекс , як надають можливості при послідовному навантаженні датчиків , що ка лібрують та зразкових засобів вимірювань , здійснювати масштабу вання апаратури Індикації датчиків , що калібрують, які надають J можливість з необхідною точністю постійно визначати натяг армок * нату. Порівняльний аналіз технічного рішення, що заявляється з І» шими відомими Із науково-технічної та патентної літератури дозв ляе виявити ознаки, які відрізняють рішення , що заявляють від п тотипу, що дає можливість авторам зробити висновок про ВІДПОВІД ність заявлених ознак критерію "суттєві ВІДМІНИ", ЯКИЙ визначає новину винаходу. '* На фіг. І представлено пристрій , який реалізує спосіб , що г являється, на фіг.2 - розріз Б-Б на фіг.І, на фіг.З - розріз Вна фіг.І, на фіг. 4 - розріз Т-Г на фіг, І. Пристрій складається з встановленої на нерухомій опорі І платформи 2 з високоточними силовимірювальними датчиками 3, н яких встановлені зцентровані за допомогою жорстко встановлених силовимірювальних датчиках 3 конусних пластин 4, гідроциліндри ВИХІДНІ -5домкрата 6. Усередині домкрата 6 розташований вертикально встанов лений шунтуючий елемент 7, який опирається на нерухому опору І за допомогою настановної запобіжної гайки 8, зв'язаної з шунтуючим елементом 7 різьбовим з'едненням 9. У щунтуючому елементі 7 розташований жорстко зв'язаний з ним за допомогою ексцентрика 10, армоканат II, жорстко закріплений у неру-хомій опорі І . Армоканат II охоплює палець 12, жорстко закріплений в домкраті 6. На шунтуючому елементі 7 встановлений силовимірювальний npj стрій, який складається з жорстко закріпленої на шунтуючому еле менті 7, опорної частини ІЗ з нерухомо встановленими на ній по в тикалі силовимірювальними датчиками 14, що калібрують; жорстко з кріпленої на шунтуючому елементі 7 вантажоприймальної частини І £ у якій розміщені зв'язані з нею різьбовими з'єдненнями з можливі тю переміщення ло вертикалі, СИЛОВВІДНІ елементи 16, які контакт ють з силовимірювальними елементами 17, силовимірювальних датчиків 14, що калібрують. Над вантажоприймальною частиною 15 на шуі туючому елементі 7 розташований жорстко зв'язаний з ним захисни козирок 18. Спосіб здійснюється таким чином . Силоввідними елементами 16 створюють на силовимірювальні де чики 14, що калібрують тиск рівний максимальному зусиллю Ркакс . на які вони розраховані І фіксують його значення апаратурою Іщ ції І реєстрації (на кресленні не показана ) силовимірювальних ; чиків 14, що калібрують. Далі за допомогою механізму силовведеі (домкрата 6), напрягають армоканат II зусиллям, під час досягн якого відбувається відрив від нерухомої опори І настановної за біжної гайки 8, яка фіксує на опорі положення шунтуючого елемє 7 І натяг розташованого у ньому армоканату II; І апаратурою Is -б. нації та реєстрації (на кресленні не показана) зразкового засобу вимірювання (контрольної платформи 2 з високоточними силовимірю вальними датчиками 3) фіксують значення зусилля натягу армоканат } II Рфакт., після чого настановною запобіжною гайкою 8 фіксують пс ложення шунтуючого елементу V на нерухомій опорі І та натяг розт * шованого у ньому армоканата II. Після цього домкратом 6 напружують армоканат II зусиллям Рмакс., яке регламентується технічною документацією, фіксують його значення апаратурою Індикації та ре естрацІІ контрольної платформи 2, І настановною запобіжною гайко 8 фіксують на нерухомій опорі І положення шунтуючого елементу 7 зусилля натягу розташованого у ньоі^у армоканату II; стабілізують показання силовимірювальних датчиків 14, що калібрують, установі ють нульове значення діючого на них зусилля Рмін.дат ., яке с початковим значенням зусилля , яке сприймають силовимірювальні дат * 14, що калібрують під час їх подальшого масштабування І фіксуют його апаратурою Індикації і реєстрації силовимірювальних датчик 14, що калібрують. Після цього поступово розвантажують домкрат 6, навантажують ловимірювальну систему І фіксують значення зусиль по точках , яв регламентуються нормативними документами (ВІДПОВІДНО ї^нул.дат., 20% Рмакс.дат., 40% Рмакс.дат., 60% Рмаксдат., 80% Рмакс.дат. Рмакс.дат.),(при цьому по мірі зменшення зусилля , яке створюєте домкратом 6, силовимірювальні датчики 14, що калібрують - наваз жуються); при цьому здійснюють масштабування апаратури Індикац силовимірювальної системи, тобто адекватно порівнюють показанн апаратури Індикації зразкового засобу вимірювання І апаратури дикацїї силовимірювальних датчиків 14, що калібрують, - ЗДІЙСР ють настроювання та калібрування силовимірювальних датчиків К -7які постійно визначають натяг армоканату II, Таким чином, спосіб, що заявляється дозволяє періодично здійс нювати калібрування І повірку силовимірювальних датчиків , які встановлюють на армоканатах захисних оболонок енергоблоків атомних елек 1 ростанцій. Спосіб, що заявляється буде використано у мобільній вимірювань но-інформаційній системі для контролю зусиль натягу армоканатів Cffi енергоблоків з реакторами типу ВВЭР -IQOG на ЗАЕС (м.Енергодар). Cfeoc'cS тех них Ябтори. ІЛ J 3M. Зраь З,О Орлоб
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for calibration and check of force-measuring gauges in system of control of tension of armored cables
Автори англійськоюNikitinskyi Mykhaylo Pavlovych, Abarbarchuk Ihor Azarovych, Braz Vadym Davydovych, Orlov Valerii Oleksandrovych
Назва патенту російськоюСпособ калибровки и поверки силоизмерительных датчиков в системе контроля натяжения армоканатов
Автори російськоюНикитинский Михаил Павлович, Абарбарчук Игорь Азарович, Браз Вадим Давидович, Орлов Валерий Александрович
МПК / Мітки
МПК: G01L 1/22
Мітки: повірки, контролю, спосіб, калібрування, датчиків, армоканатів, натягу, системі, силовимірювальних
Код посилання
<a href="https://ua.patents.su/8-31547-sposib-kalibruvannya-ta-povirki-silovimiryuvalnikh-datchikiv-u-sistemi-kontrolyu-natyagu-armokanativ.html" target="_blank" rel="follow" title="База патентів України">Спосіб калібрування та повірки силовимірювальних датчиків у системі контролю натягу армоканатів</a>
Спосіб установлення пристрою для вимірювання сили у системі контролю натягу армоканатів захисних оболонок енергоблоків атомних електростанцій
Номер патенту: 31322
Опубліковано: 15.12.2000
Автори: Нікітінський Михайло Павлович, Браз Вадим Давидович, Абарбарчук Ігор Азарович, Орлов Валерій Олександрович
Мітки: сили, вимірювання, армоканатів, атомних, натягу, контролю, пристрою, оболонок, захисних, електростанцій, системі, установлення, енергоблоків, спосіб
Текст:
..., які зв'язані з особливістю конструкції основи , силоутворюючого пристрою (домкратя) та вузла силовведення, які дозволяють здійснити вбудову пристрою у систему армоканатів у похилому положенні , а також в особливості його монтажу та демонтажу на гільзі армоканата,яка за безпечує надійність та необхідну точність вимірювання натягу кож ного армокаката. Порівняльний аналіз технічного рішення, що заявляється з Іншими, відомими Із...
Спосіб вимірювання температури з застосуванням напівпровідникових датчиків, що мають p-n переходи
Номер патенту: 31120
Опубліковано: 15.12.2000
Автори: Рибчак Володимир Костянтинович, Плюта Ігор Васильович, Сташук Вадим Данилович
МПК: G01K 7/01
Мітки: мають, вимірювання, напівпровідникових, переході, спосіб, датчиків, температури, застосуванням
Текст:
.../2 . При цьому на р-п - переході формується імпульсна напруга, амплітуда якої дорівнює Vm = К, - V2 > яка згідно з (2) пропорційна температурі Т. Отже, для калібрування датчика достатньо виміряти амплітуду напруги на р-п - переході при одному опорному значенні температури Го , наприклад, взятому посередині діапазону вимірюваних температур,, щоб визначити коефіцієнт пропорційності між амплітудою вихідної напруги датчика і вимірюваною...
Спосіб контролю віддалених датчиків та пристрій для його здійснення
Номер патенту: 9858
Опубліковано: 30.09.1996
Автори: Мезніков Артур Володимирович, Стрекалова Леонора Олександрівна, Стаднік Микола Іванович
МПК: G08C 19/16
Мітки: віддалених, спосіб, контролю, датчиків, пристрій, здійснення
Формула / Реферат:
(57) 1. Способ контроля удаленных датчиков, заключающийся в передаче по линии связи выпрямленного однополупериодного напряжения, из которого формируют импульсы, соответствующие состоянию датчиков, контроль импульсов осуществляют путем сравнения сформированных импульсов с эталонными и формируют по результатам сравнения команды управления, отличающийся тем, что при включенном состоянии датчиков формируют последовательность импульсов одной...
Пристрій для контролю індукційних датчиків

Номер патенту: 1332
Опубліковано: 25.03.1994
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: G01R 31/02
Мітки: індукційних, датчиків, пристрій, контролю
Формула / Реферат:
1. Устройство для контроля индукционных датчиков, содержащее источник постоянного напряжения, резистор, первую и вторую клеммы для подключения к объекту контроля, первый вывод источника постоянного напряжения соединен с первым выводом резистора, второй вывод которого соединен с первой клеммой для подключения объекта контроля, второй вывод источника постоянного напряжения соединен с общей шиной, отличающееся тем, что, с целью расширения...
Пристрій для дистанційного контролю становища по черзі працюючих контактних датчиків
Номер патенту: 7692
Опубліковано: 26.12.1995
Автори: Шапошнік Василь Іванович, Барданов Валерій Олександрович
МПК: G08C 19/16
Мітки: пристрій, дистанційного, працюючих, черзі, контактних, становища, датчиків, контролю
Формула / Реферат:
1. Устройство для дистанционного контроля состояния поочередно работающих контактных датчиков, содержащее на пункте контроля источник переменного напряжения, выполненный в виде трансформатора, начало первой выходной обмотки которого является первым выходом источника переменного напряжения, конец первой выходной обмотки которого соединен с началом второй выходной обмотки и является общим выходом источника переменного напряжения, конец...
Попередній патент: Цифровий трифазний генератор полігармонічних сигналів
Наступний патент: Пристрій для ендонозальної хірургії
Випадковий патент: Спосіб прогнозування зрощення перелому