Спосіб градуювання датчиків температури
Номер патенту: 29475
Опубліковано: 10.01.2008

Формула / Реферат
Спосіб градуювання датчиків температури, який полягає у визначенні індивідуальної градуювальної характеристики шляхом вимірювання величини електричного вихідного сигналу градуйованого датчика в не менше ніж двох ![]() температурних точках
температурних точках ![]() , де
, де ![]() , діапазону робочих температур датчика, перша з яких
, діапазону робочих температур датчика, перша з яких ![]() відповідає максимуму середньоквадратичного відхилення індивідуальних градуювальних характеристик датчиків даного типу від усередненої градуювальної характеристики для датчиків даного типу
відповідає максимуму середньоквадратичного відхилення індивідуальних градуювальних характеристик датчиків даного типу від усередненої градуювальної характеристики для датчиків даного типу ![]() , з наступним розрахунком індивідуальної градуювальної характеристики
, з наступним розрахунком індивідуальної градуювальної характеристики ![]() у всьому діапазоні робочих температур на основі
у всьому діапазоні робочих температур на основі ![]() та функцій девіації, які характеризують розкид індивідуальних градуювальних характеристик датчиків даного типу, який відрізняється тим, що друге та наступні вимірювання вихідного електричного сигналу градуйованого датчика проводять в температурних точках
та функцій девіації, які характеризують розкид індивідуальних градуювальних характеристик датчиків даного типу, який відрізняється тим, що друге та наступні вимірювання вихідного електричного сигналу градуйованого датчика проводять в температурних точках ![]() , де
, де ![]() , які відповідають мінімумам коефіцієнтів множинної кореляції між значеннями відхилень індивідуальних градуювальних характеристик від усередненої в температурних точках, в яких проводять вимірювання, та значеннями відхилень індивідуальних градуювальних характеристик від усередненої в довільних температурних точках діапазону робочих температур датчиків, а як функції девіації використовують коефіцієнти лінійної множинної регресії
, які відповідають мінімумам коефіцієнтів множинної кореляції між значеннями відхилень індивідуальних градуювальних характеристик від усередненої в температурних точках, в яких проводять вимірювання, та значеннями відхилень індивідуальних градуювальних характеристик від усередненої в довільних температурних точках діапазону робочих температур датчиків, а як функції девіації використовують коефіцієнти лінійної множинної регресії ![]() значень відхилень індивідуальних градуювальних характеристик датчиків від усередненої в довільних температурних точках робочого діапазону датчиків по значеннях відхилень індивідуальних градуювальних характеристик датчиків від усередненої в температурних точках, в яких проводять вимірювання, а індивідуальну градуювальну характеристику градуйованого датчика розраховують з виразу:
значень відхилень індивідуальних градуювальних характеристик датчиків від усередненої в довільних температурних точках робочого діапазону датчиків по значеннях відхилень індивідуальних градуювальних характеристик датчиків від усередненої в температурних точках, в яких проводять вимірювання, а індивідуальну градуювальну характеристику градуйованого датчика розраховують з виразу:
![]() ,
,
де ![]() - виміряне значення вихідного електричного сигналу датчика в температурній точці
- виміряне значення вихідного електричного сигналу датчика в температурній точці ![]() .
.
Текст
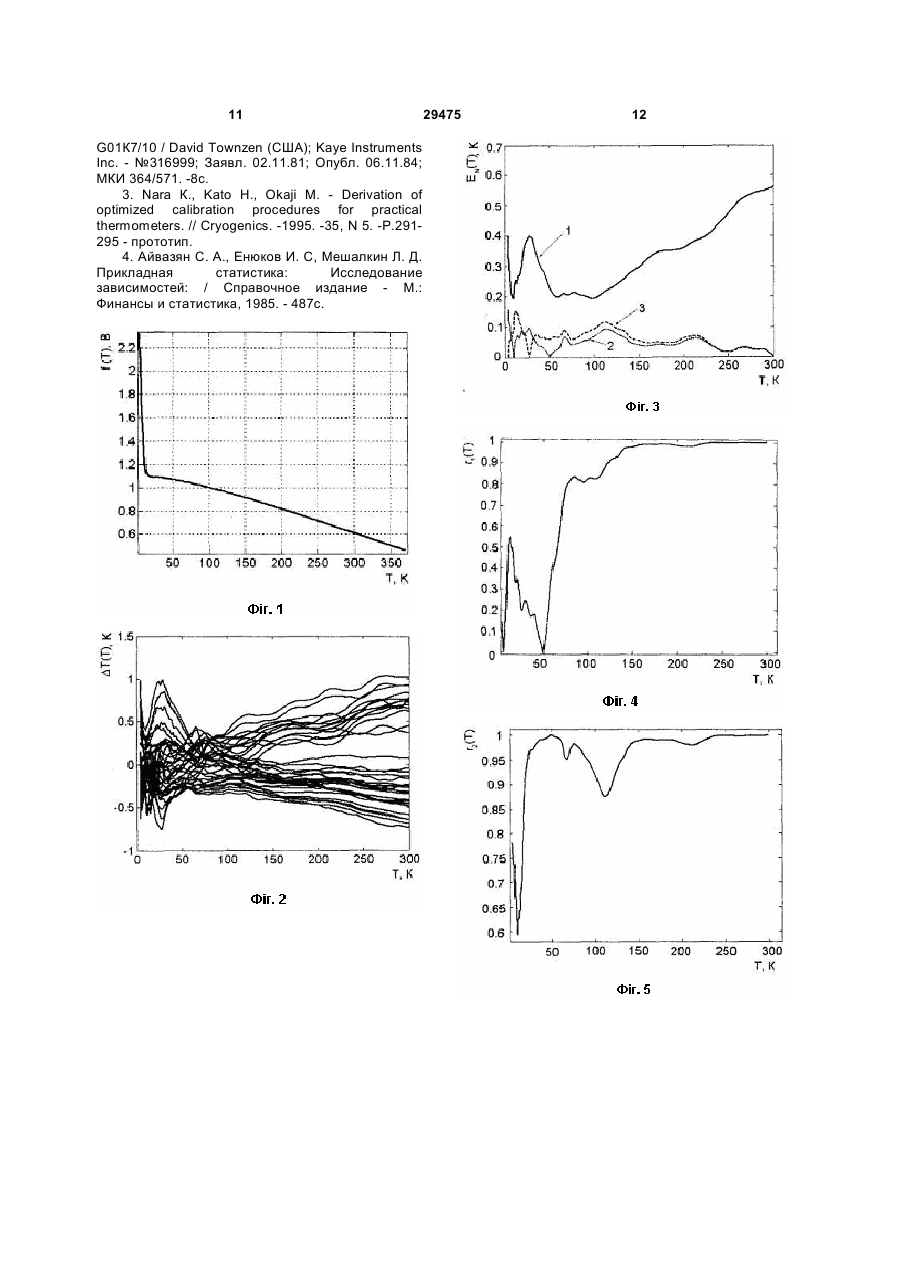
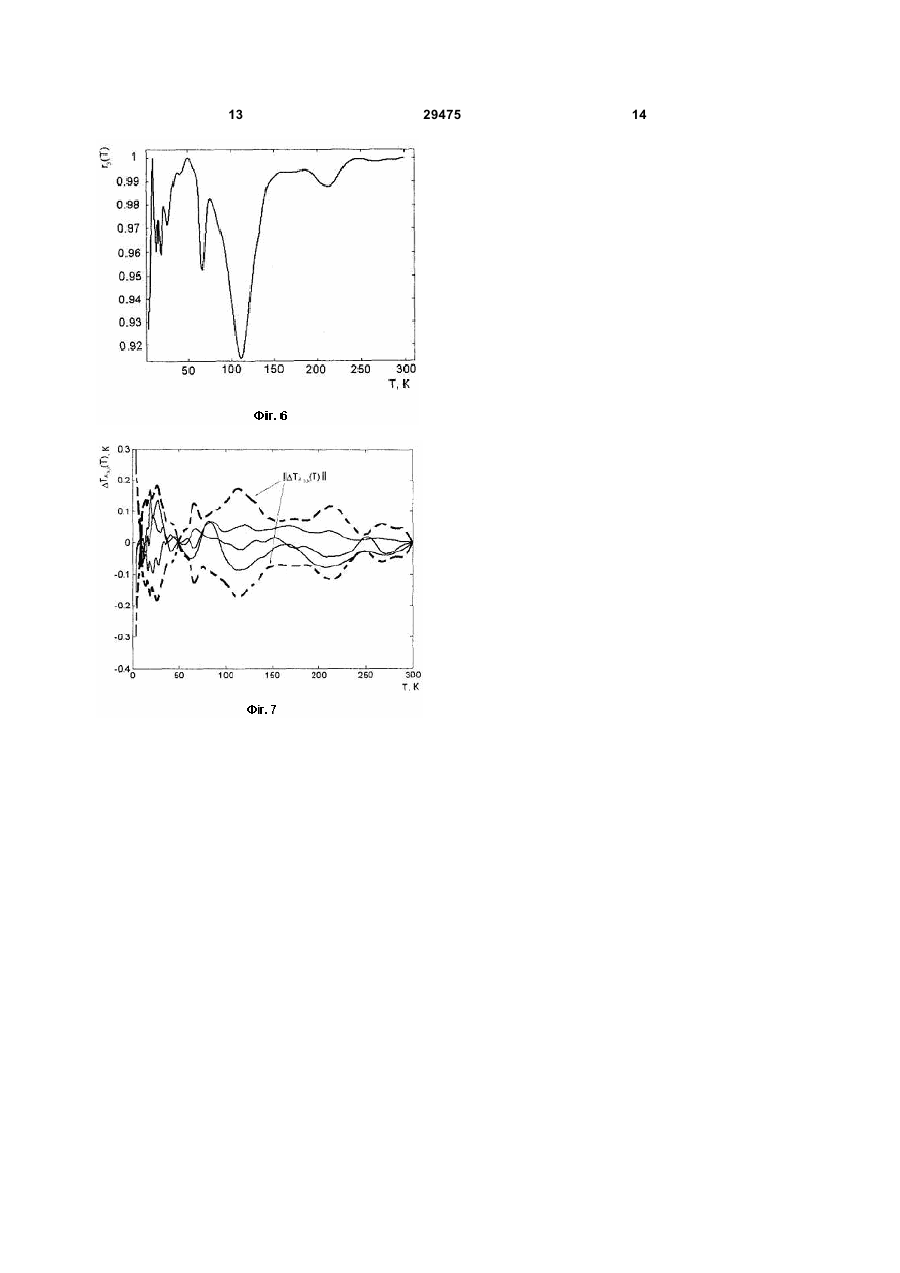
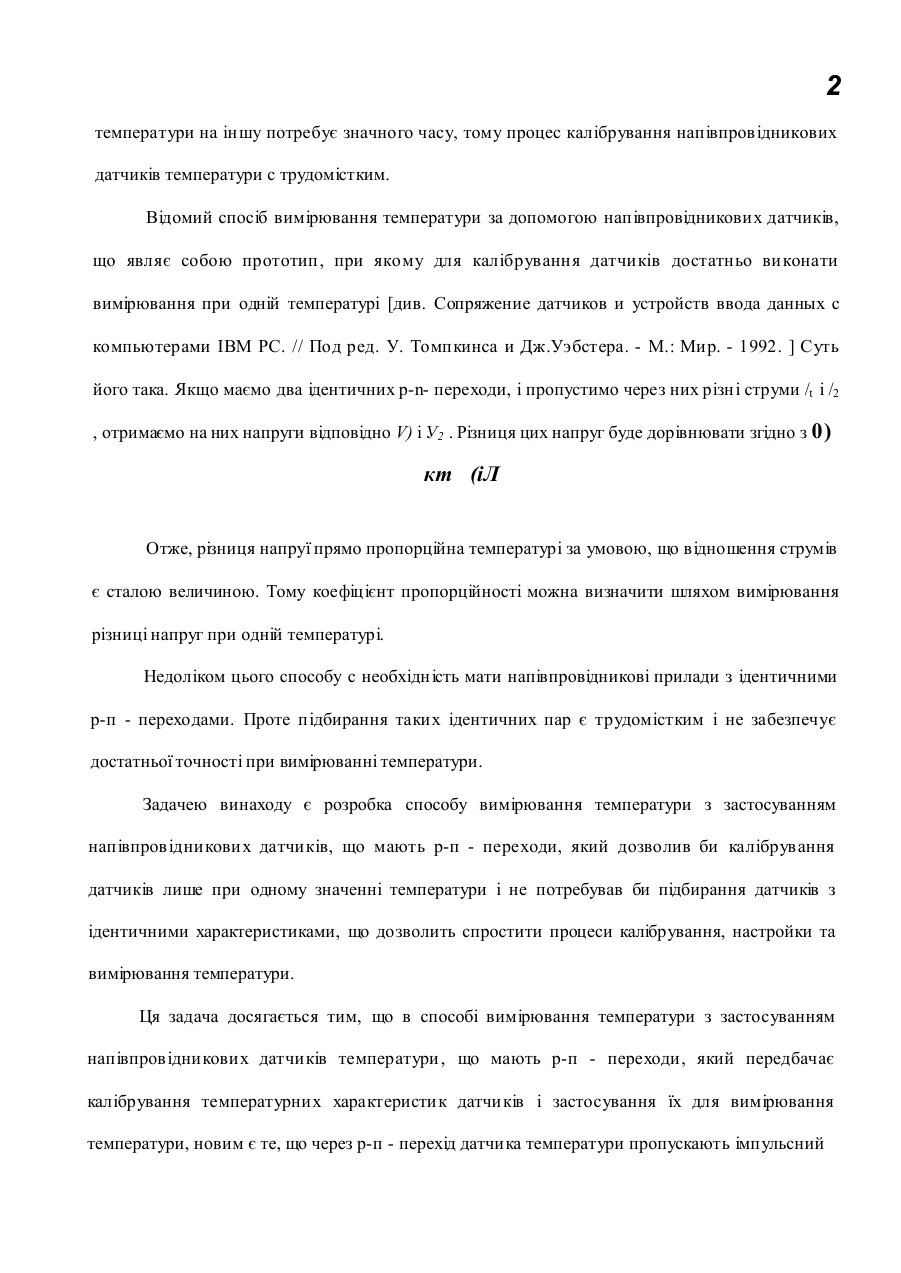
Спосіб градуювання датчиків температури, який полягає у визначенні індивідуальної градуювальної характеристики шляхом вимірювання величини електричного вихідного сигналу градуйованого датчика в не менше ніж двох N температурних точках Ti , де i = 1K N , діапазону робочих температур датчика, перша з яких T1 відповідає максимуму середньоквадратичного відхилення індивідуальних градуювальних характеристик датчиків даного типу від усередненої градуювальної характеристики для датчиків даного типу A 0 (T ) , з наступним розрахунком індивідуальної градуювальної характеристики A N (T ) у всьому 2 (13) 1 3 29475 Відомо, що технологічні особливості виготовлення деяких типів датчиків температури дозволяють їх виробництво з високою взаємозамінністю. При масовому виробництві датчиків це дає змогу використання замість індивідуальної ГХ конкретного термометра усередненої для даного типу датчиків характеристики A 0 (T ) : n = A 0 (T ) å f (T) k (1) = 1 k n де fk (T ) - індивідуальна ГХ k -го датчика з вибірки об'ємом n . Недоліками використання усередненої ГХ замість індивідуальних є велика похибка та необхідність відбраківки суттєвої кількості датчиків. Наприклад, за даними [1], для кремнієвих термодіодів серії DT-400 виробництва фірми Lake Shore Cryotronics, Inc. (США) економічно доцільна точність відповідності ГХ датчиків усередненій становить ±0,25К в діапазоні 2...100К, ±0,5К в діапазоні 100...305К та ±1К в діапазоні 305...475К. Більш точне вираження ГХ потребує відбраківки невиправдано великої кількості датчиків. Відомий спосіб градуювання з використанням усередненої ГХ, який передбачає вимірювання індивідуальної характеристики градуйованого термометра в двох температурних точках - аналог [1]. Даний спосіб названий ((програмним градуюванням» (далі, якщо немає окремих уточнень, слово «програмне» опускається). Оцінку індивідуальної ГХ градуйованого термометра A (T ) розраховують з виразу: A (T ) = m × A0 (T ) + [f (T2 ) - m × A 0 (T1 )] (2) де T1, T2 -температури, при яких проведено вимірювання індивідуальних ГХ f (T1 ) й f (T2 ) , відповідно; (f (T2 ) - f (T1)) - параметр нахилу. m= (A 0 (T2 ) - A 0 (T1)) Даний спосіб дозволяє скорегувати нахил і зміщення усередненої ГХ по відношенню до індивідуальної ГХ градуйованого термометра, тобто реалізує процедуру лінійної корекції по двом точкам шкали вимірювального приладу. На лінійній ділянці градуювальної характеристики даний спосіб дозволяє зменшити похибку визначення ГХ більш ніж в 3-рази, але при нелінійній - похибка значна. Відомий спосіб автоматичної компенсації розкиду датчиків різних фізичних величин [2] аналог, який також може бути використаний при градуюванні датчиків температури. Спосіб передбачає вимірювання вихідної величини градуйованого датчика в двох відомих температурних точках робочого діапазону T1 і T2 та розрахунок виміряного значення температури з допомогою виразу (вираз приводимо в позначеннях даного опису): T = [f (T) - (f ( 1 )+ Df (T1))] T (T2 - T1) +T [(f (T2 ) + Df (T2 )) - f (T1 )] 1 (3) 4 де f (T1) , f (T2 ) - значення вихідного сигналу, що відповідають усередненій ГХ при значеннях температури T1 і T2 , відповідно; f (T1)¢, f( T2) ¢ значення вихідного сигналу датчика в температурних точках T1 і T2 , відповідно; f (T ) - значення вихідного сигналу датчика при вимірюваній температурі T ; ( Df (T ) = f ( )- f T ¢); T 1 1 1 Df (T2 ) = f ( 2 ) - (f (T2 ) + Df (T1)) . T ¢ Даний спосіб дозволяє скоректувати розбіжності індивідуальних ГХ датчиків, що фактично вирішує задачу градуювання. Але даний спосіб також малоефективний для датчиків температури зі значною нелінійністю ГХ. Для нелінійних ГХ запропоновано використовувати спеціальні пристрої, що ускладнює апаратну частину системи градуювання. Відомий спосіб градуювання датчиків температури [3], обраний нами за прототип, який передбачає вимірювання електричної за природою величини на виході градуйованого датчика в точках, які відповідають максимумам залишкового середньоквадратичного відхилення (СКВ), і розрахунок оцінки індивідуальної ГХ з використанням функцій девіації, які характеризують розкид індивідуальних ГХ відносно усередненої для даного типу датчиків. Вихідними даними для проведення градуювання являється вибірка об'ємом п раніше отриманих в результаті повного градуювання індивідуальних ГХ датчиків одного типу з градуйованим. З допомогою (1) розраховують усереднену ГХ. Оцінка середньоквадратичного відхилення (СКВ) температурних відхилень індивідуальних ГХ вибірки від усередненої становить: E0 (T ) = 1 n -1 é fk (T ) - A 0 (T ) ù ú 0 (T ) / ¶T û k =1 n å êë ¶A 2 (4) СКВ (4) досягає максимуму при температурі Ti . Перший крок градуювання проводять при температурі Ti . Функцію девіації при кількості вимірювальних точок допомогою виразу: N 1 = визначають з n D1(T ) = å [(f (T) - A (T ))× S(f (T ) - A (T ))] k 0 k 1 0 1 k =1 n å [(f (T ) - A (T )) × S(f (T ) - A (T ))] k 1 0 1 k 1 0 (5) 1 k =1 ì +1 x ³ 0 - функція знаку. де S(x ) = í î- 1 x á 0 Розраховані ГХ першого ступеня для вихідної вибірки знаходять з виразу: A k,1(T ) = A 0 (T ) + [fk (T1) - A 0 (T1)]× D1(T ) (6) 5 29475 Функція девіації D1(T ) введена таким чином, що A k,1(T1) = fk (T1) . В інших температурних точках розраховані ГХ A k,1(T ) відрізняються від дійсних fk (T ) на величину, яка залежить від властивостей даного типу датчиків. Цю величину оцінюють з допомогою СКВ E1(T ) з виразу (4), де замість A 0 (T ) підставляють E1(T ) залежність A k,1(T ) . набуває Температурна максимального значення в температурній точці T2 . Для T2 проводять розрахунок функції девіації D2 (T ) і.ГХ другого ступеня наближення A k,2 (T ) . В загальному випадку на i -му кроці обробки вихідної вибірки СКВ похибки наближення індивідуальних ГХ розраховують з виразу: 1 n - i -1 Ei-1(T ) = é fk (T ) - Ak , i (T ) ù ú ê û ë ¶A k , 0 (T ) ¶T ú k =1 ê n å Для максимуму Ei-1(T ) розраховують функцію девіації n Di (T ) = å [(f (T) - A k k,i k =1 n å [(f (T ) - A k i k,i 2 (7) в точці Ti (T )) × S(fk (Ti ) - A k,i (Ti ))] (Ti ))× S(fk (Ti ) - Ak,i (Ti ))] (8) k =1 з допомогою якої розраховують ГХ і - го ступеня наближення A k,i (T ) = A k,i -1(T ) + fk (Ti ) - A k,i-1(Ti ) × Di (T ) (9) Описана ітеративна процедура обробки вихідної вибірки повторюють N раз до моменту, коли максимум СКВ EN (T ) стане меншим ніж допустиме значення. Отримані функції Di (T ) , де = 1K N , i використовують при градуюванні датчиків, ГХ яких не використовувались при розрахунках. Розраховану ГХ градуйованого датчика N-гo ступеня отримують з виразу: [ AN (T ) = A0 (T ) + ] N å [(f (T ) - A i ( )) × Di T ]) ( i-1 Ti (10) i=1 За даними [3], градуювання з допомогою способу-прототипу дозволяє зменшити кількість вимірювальних точок для отримання індивідуальної ГХ з необхідною точністю. В якості міри точності такого градуювання запропоновано використовувати максимальне значення СКВ EN (T ) . Спосіб дозволяє проводити градуювання датчиків як з лінійними, так і нелінійними ГХ. Недоліками способу є низька точність, яку характеризує значна величина EN (T ) , та неможливість оцінки дійсної похибки отриманої ГХ A N (T ) . Величина EN (T ) являється статистичним показником і характеризує точність визначення ГХ значної кількості датчиків. На практиці ж необхідно 6 оцінити точність градуювання даного конкретного датчика, що розглянутий спосіб не дозволяє. Задачею даної корисної моделі є розробка такого способу градуювання датчиків температури, який дозволить підвищити точність оцінки ГХ при тій самій або меншій кількості вимірювальних точок. Поставлена задача вирішена тим, що в способі градуювання датчиків температури, який полягає у визначенні індивідуальної градуювальної характеристики шляхом вимірювання величини електричного вихідного сигналу градуйованого датчика в не менше ніж двох N температурних точках Ti , де i = 1K N , діапазону робочих температур датчика, перша з яких T1 відповідає максимуму середньоквадратичного відхилення індивідуальних градуювальних характеристик датчиків даного типу від усередненої градуювальної характеристики для датчиків даного типу A 0 (T ) , з наступним розрахунком індивідуальної градуювальної характеристики A N (T ) у всьому діапазоні робочих температур на основі A 0 (T ) та функцій девіації, які характеризують розкид індивідуальних градуювальних характеристик датчиків даного типу, друге та наступні вимірювання вихідного електричного сигналу датчиків проводять в температурних точках Ti , де i = 2 K N , які відповідають мінімумам коефіцієнтів множинної кореляції між значеннями відхилень індивідуальних ГХ від усередненої у цих точках та значеннями відхилень індивідуальних ГХ від усередненої в довільних точках робочого температурного діапазону датчиків. В якості функцій девіації використовують коефіцієнти лінійної множинної регресії qi (T ) значень відхилень індивідуальних ГХ датчиків від усередненої в довільних температурних точках по значенням відхилень індивідуальних ГХ датчиків від усередненої в температурних точках, в яких проводять вимірювання. Індивідуальну градуювальну характеристику градуйованого датчика розраховують з виразу: AN (T ) = A0 (T ) + N å [(f (T ) - A (T ))× q (T )] i i=1 0 i i (11) де f (Ti ) - виміряне значення вихідного електричного сигналу датчика в температурній точці Ti . Вихідними даними для проведення градуювання являється вибірка об'ємом n раніше отриманих в результаті повного градуювання дійсних індивідуальних ГХ датчиків температури даного типу. Як і в способі-прототипі, перша температурна точка T1 , в якій проводиться вимірювання вихідного сигналу датчика, відповідає максимальному значенню середньоквадратичного відхилення E0 (T ) , розрахованого з (4). 7 29475 Для встановлення решти N - 1 температурних точок Ti , де i = 2 K N , в яких необхідно проводити вимірювання проводиться кореляційний аналіз ГХ, які входять у вибірку. Матриця даних для вибірки об'ємом n при кількості вимірювальних точок N має вигляд: é Df1(T ) Df1(T1) K Df1(TN )ù ú ê Df (T ) Df2 (T1) K Df2 (TN )ú X=ê 2 (12) ê K K K K ú ú ê ê Dfn (T ) Dfn (T1) K Dfn (TN )ú û ë де Dfk (T ) = fk (T ) - A 0 (T ) температурна залежність відхилення k-ї дійсної індивідуальної ГХ від усередненої; fk (T ), k = 1K n - дійсна індивідуальна ГХ k-го датчика, отримана в результаті повного градуювання. Матриці даних X відповідає кореляційна матриця: ér00 r01 K r0N ù ú ê r r11 K r1N ú R = ê 10 (13) êK K K K ú ú ê êrN0 rN1 K rNN ú û ë n å (Df (T )× Df (T )) k rij = де k 1 = n å Df k k 1 = 2 i k парні (Ti ) × å Dfk2 (Tj ) коефіцієнти кореляції, i, j = 1K N . Нульові значення індексів i та j відповідають першому стовпчику матриці X , елементи якого являються функціями температури. Оцінкою стохастичного функціонального зв'язку Dfk (T ) з Dfk (Ti ) , i = 1K N є коефіцієнт множинної кореляції, який розраховують з виразу: (14) де det (R) - визначник матриці R ; R00 (T ) - алгебраїчне доповнення елементу r00 кореляційної матриці R . В точці T = T1, rN (T1) = 1 , що відповідає повній функціональній визначеності. При віддаленні температури T від точки вимірювання T1 , rN (T ) набуває значень в діапазоні від 1 до 0, причому чим ближче до нуля, тим слабший функціональний зв'язок. Для більшості практичних випадків значимість коефіцієнта множинної кореляції може бути перевірена з допомогою t - критерію Ст'юдента із співвідношення [4]: rN (T ) × n - N - 1 ³ t1-p (n - N - 1) (15) 1 - rN2 (T ) ( ) Ст'юдента для n - N - 1 ступенів свободи та довірчої вірогідності Р. Якщо нерівність (15) не виконується для певного діапазону температур, rN приймають незначимим, і кількість вимірювальних точок N збільшують на 1. В якості наступної вимірювальної точки приймають температуру T2 , при якій абсолютна величина r1 , набуває мінімального значення. Для оновленої матриці даних X, яка включає стовпчик [Df (T ), Df (T )K Df (T )]¢ , 1 2 2 2 n 2 розраховують rN і перевіряють його значимість. Описану процедуру повторюють поки коефіцієнт множинної кореляції не стане значимим в усьому робочому діапазоні даного типу датчиків. Наступною операцією обробки вихідних даних є регресійний аналіз, метою якого є побудова регресійної моделі індивідуальних ГХ. Модель множинної лінійної регресії Dfk по Dfk (Ti ) має вигляд AN,k (T ) = A 0 (T ) + N å [(f (T ) - A (T ))× q (T ]) k i 0 i (16) i i= 1 E0 (T ) Q0i × - частинні коефіцієнти E0i Q00 лінійної регресії; Qij - алгебраїчне доповнення елемента rij матриці R ; k 1 = det (R ) rN (T ) = 1 R 00 (T ) де t1-p (n - N - 1) - табличне значення критерію де qi (T ) = j n 8 E0 (T ) = n æ Dfk (T ) ö ÷ ç ç ¶A ¶T ÷ 0 ø 1è å 1 n -1 k= 2 - СКВ елементів 1-го стовпчика матриці даних X ; E0 i = 1 n -1 æ Dfk (Ti ) ö ÷ ç ç ¶A ¶T ÷ , 0 ø k =1 è n å 2 i = 1K N СКВ елементів і-го стовпчика матриці даних X . Частинні коефіцієнти регресії qi (T ) в даному випадку відіграють роль аналогічну до функцій девіації Di (T ) способу-прототипу. Модель (16) дозволяє оцінити ГХ, які входять до вибірки з СКВ температурної похибки, яке аналогічно до (7) можемо розрахувати з допомогою виразу: EN (T ) = 1 n -N -1 é fk (T ) - AN,k (T ) ù ê ú ¶A 0 (T ) ¶T û k =1 ë n å 2 (17) EN (T ) характеризує точність наближення індивідуальних ГХ. За цим параметром модель множинної лінійної регресії (16) є оптимальною, тобто гарантує мінімальне значення EN для даних вимірювальних точок [T1 , T2 K TN ] . Це свідчить про вищу точність запропонованого способу в порівнянні зі способом-прототипом. Крім того, якщо регресійні залишки Dfk (T ) = A N, k (T ) - fk (T ) (18) 9 29475 апроксимуються нормальним розподілом, є можливість оцінки абсолютної похибки наближення ГХ градуйованого датчика. Довірчий інтервал для граничної похибки регресійної моделі при довірчій імовірності Р визначають з виразу [4]: ( DTAN, k (T ) á t 1-P (n - N - 1) × EN (T ) × 1 + y T × X T × X 2 t 1-P (n - N - 1) де квантиль ) -1 ×y (19) розподілу 2 Ст'юдента для довірчої ймовірності Р та кількості ступенів свободи n - N - 1 ; y = (1 Df (T1) K Df (TN ))T - вектор даних для градуйованого датчика. Можливість розрахунку граничної похибки градуювання для моделі у вигляді (16) являється також перевагою запропонованої корисної моделі в порівнянні з розглянутими аналогами та прототипом. Приклади Для експериментальної перевірки запропонованої корисної моделі проводилося градуювання трьох кремнієвих діодних датчиків температури, розроблених в ІФН НАН України. Вихідним сигналом діодного датчика температури являється спад напруги при пропусканні через нього постійного прямого струму, а дійсна індивідуальна ГХ являє собою залежність спаду напруги на термодіоді від температури. На Фіг.1 зображено типову ГХ кремнієвих термодіодів в робочому діапазоні 4,2...300К. Вихідними даними для проведення градуювання являється вибірка дійсних ГХ об'ємом n=39, які отримані в результаті повного градуювання однотипних датчиків з робочим діапазоном 4,2...300К. На Фіг.2 зображено температурні залежності відхилень індивідуальних ГХ від усередненої, виражених в температурному f (T ) - A 0 (T ) . На Фіг.3 (крива 1) еквіваленті DTk = k ¶A 0 (T ) ¶T показана температурна залежність вибіркового СКВ E0 (T ) , розрахована з допомогою виразу (4). Максимального значення E0 (T ) набуває при температурі Т1=300К. Саме цю температурну точку приймаємо в якості першої точки для проведення вимірювання спаду напруги. На Фіг.4 зображено температурну залежність множинного коефіцієнта кореляції r1 , розрахованого з допомогою виразу (14), для однієї вимірювальної точки Т1=300К. Проводимо перевірку значимості коефіцієнта кореляції з допомогою нерівності (15). Табличне значення критерію Ст'юдента для кількості ступенів свободи 37 та довірчої вірогідності 0,95 становить 1,69 [4]. Значення rN (T ) × n - N - 1 при N = 1 перевищує дану 1 - rN2 (T ) величину не у всьому досліджуваному діапазоні. Коефіцієнт кореляції r1(T ) становить 0 в температурних точках 10 і 50К. На Фіг.5 показано ( ) 10 температурну залежність множинного коефіцієнта кореляції для двох вимірювальних температурних точок (50К і 300К), а на Фіг.6 - для трьох (10К, 50К та 300К). Як бачимо, при вимірюванні вихідного сигналу датчика в трьох температурних точках коефіцієнт множинної кореляції r3 (T ) не менший за 0,9 у всьому робочому діапазоні датчиків, що свідчить про наявність сильного стохастичного функціонального зв'язку значень ГХ в довільних температурних точках робочого діапазону датчика зі значеннями ГХ в названих температурних точках. Для трьох температурних точок побудована модель множинної лінійної регресії виду (15). Температурна залежність залишкового СКВ E3 (T ) (16) для побудованої моделі, а також для способупрототипу зображено на Фіг.3 (крива 2 та 3, відповідно). З Фіг.3 видно, що практично у всьому дослідженому температурному діапазоні залишкове СКВ для моделі (16) має менше значення, ніж для способу-прототипу. Це свідчить про вищу точність розрахунку індивідуальних ГХ з допомогою запропонованого способу в порівнянні зі способом-прототипом. Запропонований спосіб був використаний для градуювання 3-х датчиків, ГХ яких не увійшли у вихідну вибірку. На Фіг.7 показано температурну похибку моделі відносно дійсних ГХ fk (T ) , встановлених в процесі повного градуювання, яка розрахована з виразу: A N, k (T ) - fk (T ) DTA N, k (T ) = (20) ¶A 0 (T ) ¶T ( Максимальне ) значення DTA N, k (T ) для градуйованих датчиків становить 0,056К; 0,025К та 0,036К. Аналогічні значення при градуюванні з допомогою способу-прототипу становлять 0,065К; 0,048К та 0,044К, відповідно. Отже, новий спосіб дозволив підвищити точність градуювання при тій самій кількості вимірювальних точок. На Фіг.7 пунктиром показано довірчий інтервал для похибки градуювання з допомогою запропонованого способу DTA N , k (T ) , розрахований з виразу (19). Як бачимо, похибка не перевищує теоретично розрахованого граничного значення. Отже, запропонований спосіб градуювання дозволяє провести оцінку зверху граничного значення похибки визначення ГХ. Таким чином розроблений спосіб градуювання дозволив підвищити точність програмного градуювання в порівнянні зі способом-прототипом, для тієї самої кількості точок, в яких проводяться вимірювання. Джерела інформації: 1. Dodrill B. C., Krause J. K., Swinehart P. R., Wang V. Performance Characteristics of Silicon Diode Cryogenic Temperature Sensors // Applications of Cryogenic Technology. - 1991. - 10. - P.85-107. 2. Пат. 4481596 США, МКИ G01К7/10. Method of and apparatus for automatically compensating for variations in output response characteristics of sensors and the like: Пат. 4481596 США, МКИ 11 G01К7/10 / David Townzen (США); Kaye Instruments Inc. - №316999; Заявл. 02.11.81; Опубл. 06.11.84; МКИ 364/571. -8с. 3. Nara К., Kato H., Okaji M. - Derivation of optimized calibration procedures for practical thermometers. // Cryogenics. -1995. -35, N 5. -P.291295 - прототип. 4. Айвазян С. А., Енюков И. С, Мешалкин Л. Д. Прикладная статистика: Исследование зависимостей: / Справочное издание - М.: Финансы и статистика, 1985. - 487с. 29475 12 13 29475 14
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for calibration of temperature gauges
Автори англійськоюIvaschenko Oleksii Mykolaiovych, Shvarts Yuriy Mykhailovych
Назва патенту російськоюСпособ градуировки датчиков температуры
Автори російськоюИващенко Алексей Николаевич, Шварц Юрий Михайлович
МПК / Мітки
МПК: G01K 15/00
Мітки: датчиків, спосіб, температури, градуювання
Код посилання
<a href="https://ua.patents.su/7-29475-sposib-graduyuvannya-datchikiv-temperaturi.html" target="_blank" rel="follow" title="База патентів України">Спосіб градуювання датчиків температури</a>
Пристрій для динамічного градуювання датчиків тиску

Номер патенту: 22347
Опубліковано: 25.04.2007
Автори: Поляков Святослав Петрович, Йовченко Алла Василівна, Беспалько Сергій Анатолійович
МПК: G01N 11/00
Мітки: динамічного, градуювання, пристрій, тиску, датчиків
Формула / Реферат:
Пристрій для динамічного градуювання датчиків тиску, що містить корпус з отвором для досліджуваного датчика, вал з поперечною перегородкою що ділить корпус на порожнини, канали в поперечній перегородці для під'єднання досліджуваного датчика з порожнинами корпуса, досліджуваний датчик, взірцеві манометри, який відрізняється тим, що використовується фторопластовий обертальний клапан з г-подібними каналами та наскрізними отворами, за допомогою...
Спосіб вимірювання температури з застосуванням напівпровідникових датчиків, що мають p-n переходи
Номер патенту: 31120
Опубліковано: 15.12.2000
Автори: Плюта Ігор Васильович, Сташук Вадим Данилович, Рибчак Володимир Костянтинович
МПК: G01K 7/01
Мітки: переході, спосіб, мають, напівпровідникових, температури, вимірювання, датчиків, застосуванням
Текст:
.../2 . При цьому на р-п - переході формується імпульсна напруга, амплітуда якої дорівнює Vm = К, - V2 > яка згідно з (2) пропорційна температурі Т. Отже, для калібрування датчика достатньо виміряти амплітуду напруги на р-п - переході при одному опорному значенні температури Го , наприклад, взятому посередині діапазону вимірюваних температур,, щоб визначити коефіцієнт пропорційності між амплітудою вихідної напруги датчика і вимірюваною...
Спосіб самоперевірки датчиків температури та пристрій для його здійснення
Номер патенту: 46490
Опубліковано: 15.05.2002
Автори: Курко Владимир Романович, Скрипник Юрій Олексійович, Фрідберг Еммануїл Ізраїлевич, Лісовський Олександр Анатолійович
МПК: G01K 15/00
Мітки: температури, спосіб, здійснення, самоперевірки, датчиків, пристрій
Формула / Реферат:
1. Спосіб самоперевірки датчиків температури, який полягає в тому, що з чутливого елемента датчика, який знаходиться на об'єкті, виділяють шумову напругу в смузі частот теплових флуктуацій, вимірюють середній квадрат шумової напруги, визначають дійсну температуру чутливого елемента датчика по формулі, порівнюють її з показаннями вторинного приладу та визначають похибку датчика, який відрізняється тим, що шумову напругу датчика розщеплюють на...
Спосіб градуювання витратомірів
Номер патенту: 64901
Опубліковано: 15.03.2004
Автори: Жартовський Дмитро Миколайович, Артьомов Олександр Федорович, Козлов Валентин Євгенович, Важинський Сергій Едуардович, Залевський Геннадій Станіславович, Сухаревський Олег Ільїч
МПК: G01F 25/00
Мітки: витратомірів, градуювання, спосіб
Формула / Реферат:
Спосіб градуювання витратомірів, що полягає в подачі потоку робочого середовища, витрата якого вимірюється, через послідовно встановлені в еталонному трубопроводі пристрій подачі робочого середовища, регульований по витраті, контрольний витратомір і витратомір, що градуюється, фіксації показань контрольного витратоміра - (і=1, 2,..., n), і відповідних показань на виході...
Спосіб градуювання та перевірки витратомірів і лічильників газу
Номер патенту: 54463
Опубліковано: 17.03.2003
Автори: Козак Василь Олексійович, Федоришин Ярослав Степанович, Прудніков Богдан Іванович, Середюк Орест Євгенович, Петришин Ігор Степанович
МПК: G01F 25/00
Мітки: газу, перевірки, градуювання, лічильників, витратомірів, спосіб
Формула / Реферат:
Спосіб градуювання та перевірки витратомірів і лічильників газу, який передбачає витікання газу із резервуара по випробовувальній ділянці через стабілізатор тиску та досліджуваний прилад, і вимірювання тиску і температури, який відрізняється тим, що додатково задають температурний режим досліджування, при якому вимірюють температуру протягом певного проміжку часу в резервуарі та на досліджуваному приладі, і здійснюють алгоритм розрахунку...
Попередній патент: Кантувач для складання та зварювання рам залізничних пасажирських вагонів
Наступний патент: Спосіб визначення межі міцності пластмас при перерізуванні
Випадковий патент: Пристрій для заповнення судинної системи анатомічних препаратів