Спосіб виміру радиального зміщення осі обертових елементів станків
Номер патенту: 25726
Опубліковано: 30.10.1998
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович


Формула / Реферат
1. Способ измерения радиального смещения оси вращающихся элементов станков, включающий измерение радиальных перемещений точек вращающегося элемента станка посредством нескольких смещенных в окружном направлении датчиков линейных перемещений, с каждого из которых снимают, по меньшей мере, два показания за один оборот проверяемого элемента до и после поворота на проверяемый угол, отличающийся тем, что предварительно датчики линейных перемещений устанавливают по оси систем координат XOY и X1O1Y1 с совмещенными началами, затем вращающийся элемент станка устанавливают на произвольный угол поворота, смещают вращающийся элемент станка по оси "Y" базовой системы координат XOY и под датчиками линейных перемещений установленными на полуосях "+Y" и "-Y" базовой системы координат XOY, устанавливают равные Z+Y(0) = X-Y(0) величины зазоров, не изменяя положение вращающегося элемента станка, измеряют и запоминают величины зазоров Z+X(0) и Z-X(0) под датчиками линейных перемещений, установленными на полуосях "+X" и "-X" базовой системы координат XOY, последовательно устанавливают вращающийся элемент станка относительно начального угла поворота на углы поворота Dg, 2 × Dg, 3 × Dg, ..., k × Dg ..., 360 - Dg, на каждом из этих углов поворота смещают вращающийся элемент станка по оси "X" базовой системы координат XOY и под датчиком линейного перемещения, установленном на полуоси "-X" базовой системы координат XOY, устанавливают величину зазора Z-X(k × Dg), равную величине зазора Z-X(0) под этим датчиком линейного перемещения на начальном угле поворота вращающегося элемента станка, смещают вращающийся элемент станка по оси "Y" базовой системы координат XOY и под датчиками линейных перемещений, установленными на полуосях "+Y" и "-Y" базовой системы координат XOY, устанавливают равные Z+Y(k × Dg) = Z-X(k × Dg) величины зазоров, а величину зазора Z+X(k × Dg) запоминают, устанавливают вращающийся элемент станка на угол поворота g = k × Dg, для которого величина зазора Z+X(k × Dg) минимальна и, изменяя угловое положение вращающегося элемента станка в пределах угла g = k × Dg ± Dg, устанавливают вращающийся элемент станка на угол поворота, на котором величина зазора Z+X является точной нижней гранью величин зазоров под датчиками линейного перемещения, установленного на полуосях "+X" базовой системы координат XOY при выполнении равенств Z+Y(g) = Z-Y(g) и Z-X(g) = Z-X(0), не изменяя углового положения вращающегося элемента станка, смещают этот элемент по оси "Y" базовой системы координат XOY, останавливают его в положении, при котором сумма величин зазоров Z+X(g) и Z-X(g) минимальна и устанавливают вращающийся элемент станка таким образом, чтобы его сечение плоскостью установки датчиков линейных перемещений было симметрично оси "X" базовой системы координат XOY, не меняя углового положения вращающегося элемента станка, смещают его по оси "X" базовой системы координат, останавливают его в положении, при котором сумма величин зазоров Z+Y(g) и Z-Y(g) минимальна и устанавливают вращающийся элемент станка симметрично оси "Y" базовой системы координат XOY, в результате чего сечение вращающегося элемента станка плоскостью установки датчиков линейных перемещений устанавливают симметрично осей базовой системы координат XOY, центр упомянутого сечения совмещают с началом базовой системы координат XOY и принимают его в качестве несмещенного положения оси вращения вращающегося элемента станка, а угол поворота, на котором упомянутое сечение вращающегося элемента станка установлено симметрично относительно осей базовой системы координат XOY принимают в качестве нулевого угла поворота вращающегося элемента станка, не изменяя углового положения вращающегося элемента станка, измеряют величины зазоров Z+X, Z-X, Z+Y, Z+X1, Z-X1, Z+Y1, X-Y1 под датчиками линейных перемещений и вычисляют координаты этих датчиков по осям базовой системы координат XOY и системы координат X1O1Y1, устанавливают вращающийся элемент станка на заданный угол поворота b, измеряют величины зазоров под датчиками линейных перемещений установленными по осям базовой системы координат XOY и системы координат X1O1Y1 и вычисляют расстояния от оснований датчиков линейных перемещений до оси вращения вращающегося элемента станка, вычисляют Cn2 - 2Q пар координат оси вращения вращающегося элемента станка, сглаживают их по методу наименьших квадратов и получают уточненные координаты X(b), Y(b) оси вращения вращающегося элемента станка на заданном угле поворота b и величину его радиального смещения относительно несмещенного положения на контрольном угле поворота.
2. Способ по п.1, отличающийся тем, что если на углах Dg, 2 × Dg, 3 × Dg, ..., k × Dg, ..., 360 - Dg поворота вращающегося элемента станка относительно начального угла его поворота величина зазора Z+X(kDg) под датчиком линейного перемещения установленного на полуоси "+X" при неизменной величине зазора Z-X(k × Dg) под датчиком линейного перемещения установленного на полуоси "X" базовой системы координат XOY изменялась, сечение вращающегося элемента станка плоскостью установки датчиков линейных перемещений задают ближайшим к этому сечению эллипсом, координаты датчиков линейных перемещений на нулевом угле поворота вращающегося элемента станка и расстояния от основания датчиков до оси вращения вращающегося элемента станка на угле измерения координат оси вращения вращающегося элемента станка определяют с учетом принятой формы сечения вращающегося элемента станка плоскостью установки датчиков линейных перемещений и исключают влияние некруглости вращающегося элемента на точность определения координат оси вращения вращающегося элемента станка.
3. Способ по п.1, отличающийся тем, что упомянутые датчики устанавливают по осям более чем двух систем координат.
4. Способ по п.1, отличающийся тем, что радиальное смещение оси вращающегося элемента станка определяют из следующих соотношений:
где k = 1, n, i = 1, n
n - число датчиков линейных перемещений, установленных по осям Q систем координат, причем i ¹ k; i ¹ k ± 2Q;
q = 1, 2, ..., Q - номер системы координат, по оси которой установлен i - й или k - й датчик линейных перемещений;
X(q)Ci, Y(q)Ci, X(q)Ck, Y(q)Ck - координаты i - го и k - го датчиков в q - й системе координат;
Cil, Ckl - расстояния от i - го и k - го датчиков линейных перемещений до оси вращающегося элемента станка;
p = C2n - 2Q - число пар координат оси вращающегося элемента станка, полученных по измерениям "n" датчиков линейных перемещений, установленных по осям Q систем координат;
Xpl(b), Ypl(b) - p - я пар координат оси вращающегося элемента станка из множества "p" пар координат оси вращающегося элемента станка;
- оценки координат оси вращающегося элемента станка;
Xl(0), Yl(0) - координаты несмещенного положения оси вращающегося элемента станка;
l(b) - величина радиального смещения оси вращающегося элемента станка.
Текст
Изобретение относится к станкостроению и может быть использовано для измерения величины радиального смещения оси вращающи хся элементов станков, в частности оси вращения вала радиальной аэростатической опоры шпиндельного узла прецизионного станка. Известен наиболее близкий по технической сути к заявляемому способ измерения радиального смещения оси вращающихся элементов станков (Авт. св. №1271666, кл. B23B25/06, опубл. 23.11.86, Бюл. №43), включающий измерение радиальных перемещений точек вращающегося элемента станка посредством нескольких расположенных по окружности датчиков линейных перемещений, с каждого из которых снимают, по меньшей мере, два показания за один оборот проверяемого элемента до и после его поворота на контролируемый угол b, а величину радиального смещения lb определяют из соотношения где k - количество индикаторов; al' и al" - показания индикаторов до и после поворота вращающегося элемента станка; a l - угловое положение каждого из "k" индикаторов. Угловую координату вектора смещения определяют по формуле: Как видно из (2) величина смещения вращающегося элемента станка в проекциях на оси системы координат XOY (фиг.1) в способе прототипа представлена суммой проекций приращений показаний индикаторов на ось "Y" и суммой проекций приращений показаний индикаторов на ось "X". Таким образом, способ по прототипу включает съем показаний индикаторов на двух заданных углах поворота a и a + b, вычисление по этим показаниям величины lb радиального смещения и угловой координаты j вектора смещения оси вращения при повороте на угол b, а его суть состоит в следующем. Снимают показания индикаторов al' и al" на двух углах поворота вращающегося элемента станка и проецируют и х разность на оси "X" и "Y" системы координат XOY (фи г.1, 2), где показаны измерительная система и угловая координата вектора смещения оси вращения, соответственно Затем проекции разностей показаний индикаторов на оси "X" и "Y" усредняются и по теореме Пифагора вычисляют величину смещения оси вращения Результат вычислений ошибки увеличивают вдвое для уменьшения Таким образом, способ является приближенным. Это объясняется тем, что, если направление смещения вращающегося элемента станка заранее неизвестно, проекции разностей показаний индикаторов на оси системы координат XOY приближенно характеризуют величину смещения его оси вращения. Направление смещения оси вращения заранее неизвестно и определяется способом по прототипу. Некруглость вала радиальной аэростатической опоры шпиндельного узла прецизионного станка может составлять 5 - 10мкм, тогда как допустимое смещение оси вращения вала аэростатической опоры может не превышать 0,01 - 0,1мкм. Так как способ прототипа не учитывает при определении величины смещения оси вращения некруглость вращающегося элемента станка, вычисленная по прототипу величина смещения оси вращения вала радиальной аэростатической опоры будет характеризовать некруглость вала радиальной аэростатической опоры и не может использоваться для оценки величины смещения ее оси вращения. Таким образом, неточность определения величины смещения оси вращения вала радиальной аэростатической опоры по способу прототипа является следствием следующи х его недостатков: 1) известный способ не является инвариантным к направлению перемещения вала или вращающегося элемента станка; 2) не учтено влияние некруглости вала или вращающегося элемента станка на точность определения величины смещения оси вращения; 3) недостаточность информации о положении оси вращения проверяемого элемента. Некруглость вала или вращающегося элемента станка вносит основную погрешность, например, при определении величины смещения оси вращения вала радиальной аэростатической опоры шпиндельного узла прецизионного станка, так как: 1) некруглость вала радиальной аэростатической опоры может на один - два порядка превышать величину смещения оси вращения вала; 2) обуславливает недопустимо большую погрешность определения координат датчиков линейных перемещений; 3) вызывает изменение величин зазоров под датчиками линейных перемещений тогда, когда ось вращения вала не смещается, что недопустимо, так как смещение оси вращения вала определяется по величинам зазоров под этими датчиками. В основу изобретения поставлена задача такого совершенствования способа измерения радиального смещения оси вращающихся элементов станков, при котором за счет его инвариантности к направлению смещения вращающегося элемента станка и учета его некруглости, а также получения требуемой информации с избытком обеспечивается повышение точности измерений. Для решения этой задачи в способе измерения радиального смещения оси вращающи хся элементов станков, включающем измерение радиальных перемещений точек вращающегося элемента станков посредством нескольких смещенных в окружном направлении датчиков линейных перемещений, с каждого из которых снимают, по меньшей мере, два показания за один оборот проверяемого элемента до и после поворота на проверяемый угол, согласно изобретению, предварительно датчики линейных перемещений устанавливают по осям систем координат XOY и X1O1 Y1 с совмещенными началами, затем вращающийся элемент станка устанавливают на произвольный угол поворота, смещают вращающийся элемент станка по оси "Y" базовой системы координат XOY и под датчиками линейных перемещений установленными на полуосях "+Y" и "-Y" базовой системы координат XOY, устанавливают равные Z+Y(0) = X-Y(0) величины зазоров, не изменяя положение вращающегося элемента станка, измеряют и запоминают величины зазоров Z+X(0) и Z-X(0) под датчиками линейных перемещений, установленными на полуосях "+X" и "-X" базовой системы координат XOY, последовательно устанавливают вращающийся элемент станка относительно начального угла поворота на углы поворота Dj, 2 × Dj, 3 × Dj, ..., k × Dj, ..., 360 - Dj, на каждом из этих углов поворота смещают вращающийся элемент станка по оси "X" базовой системы координат XOY и под датчиком линейного перемещения, установленном на полуоси "-X" базовой системы координат XOY, устанавливают величину зазора Z-X(k × Dj), равную величине зазора Z-X(0) под этим датчиком линейного перемещения на начальном угле поворота вращающегося элемента станка, смещают вращающийся элемент станка па оси "Y" базовой системы координат XOY и под датчиками линейных перемещений, установленными на полуосях "+Y" и "-Y" базовой системы координат ХОY, устанавливают равные Z+Y(k × Dj) = Z-Y(k × Dj) величины зазоров, а величину зазора Z+X(k × Dj) запоминают, устанавливают вращающийся элемент станка на угол поворота j = k × Dj, для которого величина зазора Z+X(k × Dj) минимальна и, изменяя угловое положение вращающегося элемента станка в пределах угла j = k × Dj ± g, устанавливают вращающийся элемент станка на угол поворота, на котором величина зазора Z+X является точной нижней, гранью величин зазоров под датчиком линейного перемещения, установленного на полуоси "+X" базовой системы координат XOY при выполнении равенств Z+Y(j) = Z-Y и Z-X(j) = Zне изменяя углового положения X(0), вращающегося элемента станка, смещают этот элемент по оси "Y" базовой системы координат XOY, останавливают его в положении, при котором сумма величин зазоров Z+X(j) и Z-X(j) минимальна и устанавливают вращающийся элемент станка таким образом, чтобы его сечение плоскостью установки датчиков линейных перемещений было симметрично оси "X" базовой системы координат XOY, не меняя углового положения вращающегося элемента станка, смещают его по оси "X" базовой системы координат, останавливают его в положении, при котором сумма величин зазоров Z+Y(j) и Z-Y(j) минимальна и устанавливают вращающийся элемент станка симметрично оси "Y" базовой системы координат XOY, в результате чего сечение вращающегося элемента станка плоскостью установки датчиков линейных перемещений устанавливают симметрично осей базовой системы координат XOY, центр упомянутого сечения совмещают с началом базовой системы координат XOY и принимают его в качестве несмещенного положения оси вращения вращающегося элемента станка, а угол поворота, на котором упомянутое сечение вращающегося элемента станка установлено симметрично относительно осей базовой системы координат XOY принимают в качестве нулевого угла поворота вращающегося элемента станка, не изменяя углового положения вращающегося элемента станка, измеряют величины зазоров Z+X, Z-X, Z+Y , Z-Y, Z+X1, Z-X1, Z+Y1, Z-Y1 под датчиками линейных перемещений и вычисляют координаты этих датчиков по осям базовой системы координат XOY и системы координат X1O 1 Y1 , устанавливают вращающийся элемент станка на заданный угол поворота b, измеряют величины зазоров под датчиками линейных перемещений установленными по осям базовой системы координат XOY и системы координат X1O1 Y1 и вычисляют расстояния от оснований датчиков линейных перемещений до оси вращения вращающегося элемента станка, вычисляют Cn2 2Q пар координат оси вращения вращающегося элемента станка, сглаживают их по методу наименьших квадратов и получают уточненные координаты оси вращения вращающегося элемента станка на заданном угле поворота b и величину его радиального смещения относительно несмещенного положения на контрольном угле поворота. Решение задачи достигается также тем, что: если на угла х Dj, 2 × Dj, 3 × Dj, ..., k × Dj, ..., 360 - Dj поворота вращающегося элемента станка относительно начального угла его поворота величина зазора Z+X(k × Dj) под датчиком линейного перемещения установленного на полуоси "+X" при неизменной величине зазора ZX(k × Dj) под датчиком линейного перемещения установленного на полуоси "X" базовой системы координат XOY изменялась, сечение вращающегося элемента станка плоскостью установки датчиков линейных перемещений задают ближайшим к этому сечению эллипсом, координаты датчиков линейных перемещений на нулевом угле поворота вращающегося элемента станка и расстояния от оснований датчиков до оси вращения вращающегося элемента станка на угле измерения координат оси вращения вращающегося элемента станка определяют с учетом принятой формы сечения вращающегося элемента станка плоскостью установки датчиков линейных перемещений и исключают влияние некруглости вращающегося элемента на точность определения координат оси вращения вращающегося элемента станка; упомянутые датчики устанавливают по осям более чем двух систем координат; радиальное смещение оси вращающегося элемента станка определяют из следующих соотношений: где n - число датчиков линейных перемещений, установленных по осям 0 систем координат, причем i ¹ k; i ¹ k ± 2Q; q - 1, 2, ..., Q - номер системы координат, по оси которой установлен i - й или k - й датчик линейных перемещений; X(q)Ci, Y(q)Ci, X(q)Ck, Y(q)Ck - координаты i - го и k го датчиков в q - ой системе координат; Cil, Ckl - расстояния от i - го и k - го датчиков линейных перемещений до оси вращающегося элемента станка; p = Cn2 - 2Q - число пар координат оси вращающегося элемента станка, полученных по измерениям "n" датчиков линейных перемещений, установленных по осям Q систем координат; - p - я пар координат оси вращающегося элемента станка из множества "p" пар координат оси вращающегося элемента станка; оценки координат оси вращающегося элемента станка; Xl(0), Yl(0)координаты несмещенного положения оси вращающегося элемента станка; l(b) - величина радиального смещения оси вращающегося элемента станка. Для исключения влияния некруглости вала на точность измерения величины смещения его оси вращения в предлагаемом способе, если некруглость вала имеет место, сечение вала задают ближайшим к этому сечению эллипсом и, используя его параметры, точно определяют координаты датчиков линейных перемещений. Кроме того, корректируют измеренные величины зазоров под датчиками линейных перемещений на величину некруглости вала на данном угле поворота. Предлагаемый способ обеспечивает вычисление, по измерениям величин зазоров " " датчиками линейных перемещений, P = Cn2 - 2Q пар координат оси вращения вала. Следовательно информацию о положении оси вращения вала получают с избытком. Сглаживают P = Cn 2 - 2Q пары координат оси вращения вала по методу наименьших квадратов и получают точные координаты оси вращения вала вращающегося элемента станка независимо от направления его перемещения, а по ним вычисляют величину радиального смещения оси вращения с высокой точностью. На фиг.3 показана схема реализации заявляемого способа; на фиг.4 - сечение В - В на фиг.3; на фиг.5 - иллюстрация метода измерения величины смещения оси вращения вала с помощью двух датчиков линейных перемещений; на фиг.6 - погрешность изготовления вала и внутренней поверхности втулки радиальной аэростатической опоры; на фиг.7 - определение параметров эллипса в сечении вала радиальной аэростатической опоры плоскостью установки датчиков линейных перемещений; на фиг.8 устройство измерения величины смещения оси вращения вала радиальной аэростатической опоры. Пример реализации заявляемого способа измерения радиального смещения оси вращающи хся элементов станков рассмотрим на примере измерения величины радиального смещения оси вращения вала радиальной аэростатической опоры (фиг.3). Измерение величины радиального смещения оси вращения вала 1 осуществляется посредством датчиков 2 линейных перемещений и измерителей 3 величины перемещения. Вариант размещения датчиков 2 линейных перемещений, когда измерение величины радиального смещения оси вращения вала 1 осуществляется посредством восьми датчиков 2 линейных перемещений, расположенных в сечении по В - В втулки 4 радиальной аэростатической опоры 5 (фиг.3) по осям базовой системы координат XOY, в координатах которой будут определяться координаты оси вращения вала 1, и системы координат X1O1 Y1, начала которых совмещены, а оси координат сдвинуты относительно друг друга на угол 45°, показан на фиг.4. Предварительно рассмотрим реализацию заявляемого способа предполагая, что вал 1 и внутренняя поверхность втулки 4 изготовлены идеально, то есть без погрешностей размеров и формы (ось симметрии вала 1 (точка I, фиг.5) совпадает с центром круга в сечении по В - В втулки 4). Реально радиальная аэростатическая опора 5 изготавливается с упоминающимися ранее погрешностями (фиг.6). Устанавливаем датчики 2 линейных перемещений в сечении по В - В втулки 4 радиальной аэростатической опоры 5 по осям прямоугольных систем координат XOY и X1O 1 Y1, с совмещенными началами и повернутыми друг относительно друга на угол 45°. Затем вращающийся элемент станка, вал 1 радиальной аэростатической опоры 5 устанавливают таким образом, чтобы его сечение плоскостью датчиков 2 линейных перемещений было симметрично относительно осей базовой системы координат ХОY (фиг.7) и совмещают центр этого сечения вала 1 с началом базовой системы координат XOY. Определяют наличие некруглости в упомянутом сечении вала 1 радиальной аэростатической опоры 5. Итак, в данном примере реализации способа измерение координат оси вращения вала 1 радиальной аэростатической опоры 5 осуществляется посредством датчиков 2 линейных перемещений, расположенных по окружности втулки 4 радиальной аэростатической опоры 5 (фиг.7) по осям систем координат XOY и X1 O1 Y1, повернутых относительно друг друга на угол 45°. Причем, систему координат XOY принимают в качестве базовой системы координат, в которой определяют координаты оси вращения вала. Измерение координат оси вращения вала радиальной аэростатической опоры осуществляется посредством восьми датчиков 2 C1, C2, C3, C4, C5, C6, C7 , C8 линейных перемещений. Угловое положение этих датчиков 2 линейных перемещений (фиг.7) в базовой системе координат XOY соответственно равно: Для выполнения данного действия способа вал 1 радиальной аэростатической опоры 5 устанавливают на произвольный начальный угол поворота. Смещают вал 1 и под датчиками 2 линейных перемещений C1 и C5, установленных по оси "Y" базовой системы координат XOY, устанавливают равные величины зазоров Z1(0) = Z5(0). Посредством датчиков C3 и C7, установленных по оси "X" базовой системы координат, измеряют и запоминают зазоры Z3(0) и Z7(0) под этими датчиками. С дискретностью Dj устанавливают вал 1 относительно начального угла поворота на углы поворота Dj, 2 × Dj, ..., k × Dj, ..., 360° - Dj. На каждом угле поворота j = k × Dj (k = 1, 2, 3, ...) смещая вал, под датчиком C7 устанавливают величину зазора Z7(k × Dj) = Z7(0), а под датчиками 2 C1 и C5 устанавливают равные величины зазоров Z1(k - Dj) = Z5(k × Dj), измеряют и запоминают величину зазора Z3(k × Dj). Устанавливают вал 1 радиальной аэростатической опоры 5 на угол поворота j = k × Dj, для которого величина зазора Z3(k × Dj) = min и, выполняя приведенные выше действия в пределах угла j = k × Dj ± Dj с дискретой Dj1 ll × ll1(1) корень X3l(j) счи тают второй координатой оси вращения "X", в противном случае координатой оси вращения вала 1 по оси "X" считают корень X4l(j). Пусть в качестве координаты оси вращения принят корень X3l(j). Вычисляют разность по норме между первой координатой оси вращения по оси "X" X1l(j) и второй координатой X3l(j), а также между первой координатой X1l(j) и корнями X5l(j) и X6l(j) третьей системы уравнений, составленной по измерениям первого и четвертого датчиков (i =1, k = 4): Используя результаты выполненных измерений решают Cn2 4 системы алгебраических квадратных уравнений: при нечетных i, k, Далее для сокращения выражений индекс "l" в координатах (Xil(j), Yil(j) оси вращения вала 1 может опускаться. при четных i, k, при нечетных i и четных k, при четных i и нечетных k, причем, i ¹ k, i ¹ k ± 4, n = 8. Из 2(Cn2 - 4) = 2p пар корней "p" систем уравнений для вычисления координат оси вращения вала 1 радиальной аэростатической опоры 5, полученных в результате решения систем уравнений (9), (10), (11), (12) находят пару корней каждой из "p" систем уравнений (9), (10), (11), (12), являющихся координатами оси вращения вала. Итак, из 2(Cn2 - 4) в 2p пар корней "p" систем уравнений (9), (10), (11), (12) [X1l(j), Y1l(j)], [X2l(j), Y2l(j)], [X3l(j), Y3l(j)], ..., [X2pl(j), Y2pl(j)], здесь j = где Сравнивают норму ll × ll1(1) с нормой ll × ll2(1). Если ll × ll2(1) > ll × ll1(1), корень X5(j) считают третьей координатой оси вращения вала 1 по оси "X". В противном случае третьей координатой оси вращения вала по оси "X" считают корень X6(j). Пусть в качестве третьей координаты выбран корень X6(j). Тогда на очередном шаге сравнивают нормы: и по тому же правилу выбирают четвертую координату оси вращения вала 1 по оси "X". П усть в качестве четвертой координаты выбран корень X7(j). Приведенную выше процедуру продолжают до тех пор, пока в качестве координат оси вращения вала 1 не будет выбран один из пары корней X2p1(j), X2p(j) последней системы уравнений: Как и ранее, сравнивают норму ll × ll1(1) с нормой ll × ll2(1). Если, например, ll × ll2(1) < ll × ll1(1), координаты X1(j), X3(j)Х, X6(j), X7(j), ..., X2p(j) оси вращения вала, вычисленные по "p" системам уравнений и по которым была вычислена норма ll × ll2(1) запоминают. Предполагают, что корень X2(j) первой системы уравнений является координатой оси вращения вала 1 и повторяют приведенную процедуру о тбора координат оси вращения вала 1 из корней систем уравнений. Для этого выражения (13), (14), (15), (16) вычисляют для координаты X2(j). В конце описанной выше процедуры отбора один из корней X2p-1(j) или X2p(j) будет выбран в качестве координат оси вращения вала 1 в результате сравнения норм (17): погрешностей, измеренные координаты оси вращения вала 1 будут случайным образом разбросаны в окрестности точки, являющейся истинной координатой оси вращения вала 1. Для получения истинных координат оси вращения вала 1 полученные "p" пар координат вращения вала 1 сглаживают по методу наименьших квадратов. Согласно методу наименьших квадратов наиболее вероятными значениями координат оси вращения вала 1 радиальной аэростатической опоры 5 на угле j поворота вала 1 будут координаты точки, для которой сумма квадратов отклонений от "p" точек, заданных "p" парами координат оси вращения вала 1, полученных в результате решения "p" систем уравнений, будет наименьшей: После преобразования (18) получают точные значения координат оси вращения вала 1 на заданном угле поворота: и вычисляют величину смещения оси вращения вала 1 опоры 5 относительно ее несмещенного положения: Сравнивают норму ll × ll1(2) с нормой ll × ll2(1) и, если ll × ll1(2) < ll × ll2(2), координаты X2(j), X4(j), X5(j), X8(j), ..., X2p-1(j) оси вращения вала, вычисленные по "p" системам уравнений, и по которым была вычислена норма ll × ll1(2) запоминают. Сравнивают меньшую норму из (16) ll × ll2(1) с меньшей нормой ll × ll1(2) из (17). Если ll × ll1(2) < ll × ll2(1), координатами оси вращения вала 1 по оси "X" базовой системы координат XOY, вычисленными в результате решения "p" систем уравнений, являются корни X2(j), X4(j), X5(j), X8(j), ..., X2p-1(j) систем уравнений (9), (10), (11), (12). В противном случае координатами оси вращения вала 1 по оси "X" базовой системы координат XOY являются корни X1(j), X3(j), X6(j), X7(j), ..., X2p(j), по которым была вычислена норма ll × ll2(1). Координаты оси вращения вала 1 по оси "Y" соответствуют выбранным координатам оси вращения вала 1 по оси "X". В результате получают "p" пар координат оси вращения вала 1 радиальной аэростатической опоры 5, полученных в результате решения "p" систем уравнений второй степени с двумя неизвестными. В силу наличия назначенных ранее В общем случае для повышения точности измерения координат оси вращения вала 1 радиальной аэростатической опоры 5 они могут измеряться посредством датчиков 2 линейных перемещений, установленных по осям "n" систем координат, а не двух, как в данном примере реализации способа. Если некруглость в сечении вала 1 радиальной аэростатической опоры 5 плоскостью установки датчиков 2 линейных перемещении имеет место, приближают упомянутое сечение вала 1 ближайшим эллипсом и рассчитывают его параметры. Сохраняя симметричное относительно базовой системы координат положение этого сечения, снимают показания датчиков и вычисляют их с учетом некруглости вала 1. Если некруглость в сечении вала 1 опоры 5 имеет место, на угле поворота вала j = 0 при симметричном положении сечения вала 1 относительно осей базовой системы координат XOY (большая ось эллипса совмещена с осью "X" базовой системы координат XOY), смещая датчики линейных перемещений по высоте зазора, устанавливают их с одинаковыми зазорами Z1 = Z2 = Z3 = Z 4 = Z5 = Z 6 = Z7 = Z8 относительно поверхности вала 1. Для измерения величины большой полуоси эллипса в сечении вала 1 плоскостью установки датчиков 2 линейных перемещений устанавливают вал 1 на угол поворота j = 90°. Смещая вал 1 опоры 5 и, измеряя величины зазоров под датчиками C1, C3, C5, C7 (фиг.7), устанавливают разные зазоры под датчиками C1, C5 и C3, C7 . должны принять следующие расчетные значения: и устанавливают (фиг.7) сечение вала 1 симметрично осям базовой системы координат XOY. Считают, что осевое сечение вала 1 имеет форму эллипса, малая полуось "b" которого равна расчетному радиусу R вала опоры 5 (фиг.7), а большая полуось "a" этого эллипса определяется из выражения где - величина зазора под первым датчиком 2 C1 величины перемещения на нулевом угле поворота вала 1. Вычисляют полуфокусное расстояние эллипса "C" в сечении вала: и рассчитывают эксцентриситет "e" этого эллипса: Так как вал 1 радиальной аэростатической опоры 5 изготавливается с погрешностями размеров и формы, уточняют величину малой полуоси "b" эллипса, принятой равной расчетной величине радиуса R вала, а, следовательно, уточняют форму эллипса в сечении4 вала 1 радиальной аэростатической опоры 5. Для уточнения формы эллипса в сечении вала 1 плоскостью установки датчиков 2 линейных перемещений C1 C8 вал устанавливают на угол поворота j = 45°. Тогда вершина эллипса "d" (фиг.7) переместится под центр основания датчика C2. Смещают вал 1 и на угле поворота j = 45° устанавливают под датчиками 2 C2, C4, C6 , C8 равные величины зазоров Так как датчики C1 - C8 на угле поворота j = 0 были установлены с одинаковыми зазорами до поверхности вала, когда центр эллипса (сечения вала плоскостью установки датчиков C1 C8) уже был совмещен с началом базовой системы координат XOY, а его полуоси были совмещены с полуосями базовой системы координат XOY, центр эллипса в сечении вала 1 упомянутой плоскостью после установки под датчиками C2, C4, C6, C8 равных величин зазоров будет совпадать с началом базовой системы координат XOY. Тогда, если малая полуось эллипса "b" равна радиусу "R" вала Т, под датчиками C1, C3, C5, C7 (фиг.7) зазоры Измеряют величины зазоров под датчиками C1, C3, C5, C7 и сравнивают и х с полученными расчетными значениями величин зазоров, когда малая полуось эллипса "b" равна радиусу вала "R": Если эти равенства не выполняются, предположение о том, что малая полуось эллипса "b" равна расчетному значению радиуса вала "R" неверно. Для определения истинного значения малой полуоси "b" эллипса, а, следовательно, и формы сечения вала плоскостью установки датчиков 2, варьируют значение "R" радиуса вала 1 в диапазоне R ± 3s, где s - среднеквадратическая погрешность инструмента, которым измерялся радиус вала при его изготовлении, например, с шагом DR = 0,01мкм. Для каждого j - го значения радиуса R(j) рассчитывают новые параметры эллипса a(j), C(j), l(j) в соответствии с (21), (22), (23), рассчитывают величины зазоров под датчиками C1, C3, C5, C7 в соответствии разностей: с (24) и вычисляют норму В качестве величины малой полуоси "b" эллипса принимают то значение радиуса R(j) вала, которому соответствует минимальная норма разностей, рассчитывают новое значение большой полуоси "a" ближайшего к сечению вала 1 эллипса в соответствии с (21) полуфокусное расстояние "e" в соответствии с (22), а также эксцентриситет этого эллипса "e" в сечении вала 1 плоскостью установки датчиков 2 линейных перемещений C1 - C8. В системах координат XOY и X1O1 Y1, по осям которых установлены датчики C1 - C8 линейных перемещений, определяют координаты этих датчиков с учетом некруглости сечения вала 1 плоскостью установки датчиков C1 - C8 линейных перемещений. Устанавливают вал 1 на заданный угол b поворота вала 1 и измеряют координаты оси вращения вала 1 При выполнении п.1 данного способа на угле поворота вала 1 j =0 вал был установлен в такое положение, что центр эллипса в сечении вала был совмещен с началом базовой системы координат XOY, а в результате симметричного положения сечения вала 1 относительно осей базовой системы координат XOY большая полуось эллипса была совмещена с осью "X", а малая полуось эллипса была совмещена с осью "Y" этой системы координат. При выполнении п.3 данного способа были определены параметры "a", "b", "c" и "e" ближайшего к сечению вала эллипса. Тогда для измерения координат оси вращения вала 1 радиальной аэростатической опоры 5 выполняют следующие действия. На углах установки датчиков C1 - C8 величины перемещения при начальном (j = 0) угловом положении вала 1 вычисляют величины отклонений точек эллипса в сечении вала от окружности радиуса R = b (b - малая полуось эллипса), центр которой (фиг.7) совпадает с центром эллипса: где r i - полярный радиус эллипса на угле установки i - го датчика 2, причем поворота b и измеряют величины зазоров под датчиками 2 C1 - C8 линейных перемещений: На угле b поворота вала 1 вычисляют величины отклонений точек эллипса под датчиками C1 - C8 линейных перемещений от окружности радиуса R = b, центр которой совмещен с центром эллипса: где - полярный радиус эллипса на угле установки i - го датчика 2 вала 1 на угол b: при повороте Корректируют величины зазоров под датчиками 2 C1 - C8 линейных перемещений на величину некруглости вала 1 относительно окружности радиуса R: и рассчитывают расстояние от оснований датчиков C1 - C8 до смещенной оси вращений вала 1 в плоскости установки этих да тчиков 2: где a i - угол установки i - го датчика 2 линейного перемещения. Определяют координаты датчиков C1 - C8 в системах координат XOY и X1 O1 Y1: Выполняют п.2 способа, когда датчики C1 - C8 имеют координаты (29), а исходными данными для систем уравнений (9) - (12) являются (32) и (33) и получают точные координаты оси вращения вала 1 на угле поворота b Снимают показания датчиков 2 линейных перемещений на контролируемом угле поворота, вычисляют расстояния от этих датчиков 2 до оси вращения вала 1, по которым, а также по координатам датчиков 2 определяют координаты оси вращения вала 1 и величину его радиального смещения относительно несмещенного положения на контролируемом угле поворота вала радиальной аэростатической опоры 5. Устанавливают вал 1 опоры 5 на угол и вычисляют величину радиального смещения оси вращения вала 1 опоры 5 относительно ее несмещенного положения: Устройство измерения радиального смещения оси вращения вала 1 посредством датчиков 2 линейных перемещений и измерителей 3 величины перемещения, причем, датчики 2 установлены равномерно по окружности втулки 4 радиальной аэростатической опоры 5 (фиг.8,б) по осям систем координат XOY и X1O 1 Y1 (фиг.4), включает также регуляторы 6 давления в зазоре 7 (фиг.8,а) радиальной аэростатической опоры 5. Регуляторы 6 давления предназначены для управления положением вала 1 относительно внутренней поверхности втулки 4 и установлены по осям системы координат X2 O2 Y2, оси которой параллельны осям базовой системы координат XOY. На торце радиальной аэростатической опоры 5 укреплен датчик 8 (фиг.3, 8,в) угла поворота вала 1, в качестве которого может быть использован многополюсный вращающийся трансформатор. Датчик 8 угла поворота нагружен на измеритель 9 угла поворота, который предназначен для установки вала 1 радиальной аэростатической опоры 5 на заданный угол поворота. В качестве измерителя 9 угла поворота вала 1 может использоваться преобразователь фаза код (Электромеханические преобразователи угла с электрической редукцией / Под ред. А.А. Ахметжанова. - М.: Энергия, 1978. С.176). Сигналы управления на пьезостолбы 10 каждого из четырех регуляторов 6 давления формируются по отдельному каналу (фиг.8), каждый из которых включает регистр 11 набора кода сигнала управления, преобразователь 12 код - напряжение и усилитель 13 сигналов управления. Цифровой блок 14 служит для отображения на экране дисплея величин зазоров под датчиками 2 линейных перемещений и расчета параметров эллипса в сечении вала 1, а также для расчета координат оси вращения вала радиальной аэростатической опоры 5. В качестве цифрового блока 14 может использоваться персональная ЭВМ, оснащенная модулем ввода вывода для связи с внешними функциональными элементами. Примером такой ЭВМ может служить ЭВМ типа 9825 фирмы "Хьюлетт - Паккард" (Науман Г. и др. Стандартные интерфейсы для измерительной техники. - М.: Мир, 1982. - С.272 290). Причем, датчики 2 линейных перемещений соединены с входами измерителей 3 величины перемещения, выходы измерителей 3 величины перемещения соединены с входами цифрового блока 14, датчик 8 угла поворота соединен с входом измерителя 9 угла поворота, выходы регистров 11 набора. кодов сигналов управления соединены с входами преобразователей 12 код напряжение, выходы преобразователей 12 код напряжение соединены с входами усилителей 13, выходы усилителей 13 соединены с пьезостолбами 10 регуляторов 6 давления в зазоре 7 радиальной аэростатической опоры 5. Работу устройства измерения радиального смещения оси вращения вала 1 радиальной аэростатической опоры 5 рассмотрим в той последовательности, в которой выполняются действия способа. 1. Совмещают центр сечения вала 1 с началом базовой системы координат XOY, по осям которой установлены датчики 2 линейных перемещений C1, C3, C5, C7 и устанавливают сечение вала 1 симметрично относительно осей базовой системы координат XOY. Для реализации устройством этих действий способа с пульта цифрового блока 14 выполняют пуск подпрограммы "Отображение величин зазоров". В соответствии с алгоритмом работы этой подпрограммы цифровой блок 14 с заданной частотой преобразует сигналы измерителей 3 величины перемещения а цифровые двоичные коды, которые поступают в память цифрового блока 14, преобразуются в десятичный код и отображаются на экране дисплея цифрового блока 14. Вал 1 по показаниям измерителя 9 угла поворота устанавливают на углы поворота j = k × Dj с дискретой Dj. На каждом угле поворота вала 1 добиваются выполнения равенств: Для этого устанавливают коды сигналов управления на регистрах 11 кодов сигналов управления. Коды сигналов управления преобразователями 12 код напряжение преобразуются в напряжения, пропорциональные кодам сигналов управления, которые усиливаются усилителями 13 и поступают на пьезостолбы 10 регуляторов 6 давления. Длины пьезостолбов 10 изменяются и приоткрывают или призакрывают отверстия подачи газа в зазор 7 радиальной аэростатической опоры 5. В результате изменяется давление в зазоре 7 под регуляторами 6 давления (фиг.8). Под воздействием разности давлений под регуляторами 6 давления, установленных по одной оси, вал 1 сместится и займет такое положение в газовом слое радиальной аэростатической опоры 1, при котором выполняются равенства (36). Определяют угол поворота вала 1, на котором Z3 = lnfZ 3, что свидетельствует об установке сечения вала 1 симметрично оси "X" базовой системы координат XOY. Затем смещают вал 1 по оси "X" и по показаниям датчиков 2, установленных по оси "Y" базовой системы координат XOY, оставляют его в положении, при котором сумма зазоров Z1(j) и Z5(j) под этими датчиками минимальна. В результате совмещают центр сечения вала 1 с началом базовой системы координат XOY. Если в процессе установки вала 1 симметрично осям базовой системы координат XOY зазор Z3 под датчиком 2, установленным на полуоси "+X" базовой системы координат XOY не изменялся, некруглость в сечении вала 1 отсутствует. Не изменяя положения вала 1, смещают датчики 2 по высоте зазора и устанавливают под ними равные величины зазоров Z1 = Z2 = Z 3 = Z 4 = Z5 = Z6 = Z 7 = Z8 = Z. 2. Определение большой полуоси эллипса в сечении вала опоры и определение его эксцентриситета. Для этого с пульта цифрового блока 14 выполняют пуск под программы "Отображение величин зазоров" и показаниям измерителя 9 угла поворота устанавливают вал 1 опоры на угол поворота j = 90°. Изменяя коды сигналов управления на регистрах 11 набора кодов сигналов управления, устанавливают под датчиками 2, установленными по одноименным осям базовой системы координат XOY, одинаковые величины зазоров. В процессе установки вала 1 величины зазоров наблюдают на экране дисплея. Не изменяя положения вала 1 с пульта дисплея в цифровой блок 14 вводят значение радиуса R вала 1 опоры и выполняют пуск подпрограммы "Расчет эксцентриситета эллипса". В соответствии с алгоритмом работы этой подпрограммы в память цифрового блока 14 пересылается код величины зазора с измерителя величины зазора по датчику 2, установленного на полуоси "+Y" базовой системы координат. Цифровой блок 14 реализует выражения (21), (22), (23). В результате вычисляют и запоминают величину большой полуоси эллипса, а также эксцентриситет "e" и эллипса в сечении вала 1. Уточняют параметры эллипса в сечении вала 1. Для этого по показаниям измерителя 9 угла поворота устанавливают вал 1 на угол 45° и выполняют пуск подпрограммы "Отображение величин зазоров". В результате величины зазоров отображаются на экране дисплея цифрового блока 14. По описанной выше методике под датчиками 2 величин зазоров, установленных по осям системы координат X1 O1 Y1 (C2, C 4, C6 , C8), устанавливают равные величины зазоров и совмещают центр сечения вала 2 с началом базовой системы координат XOY. С пульта цифрового блока 14 выполняют пуск подпрограммы "Коррекция формы сечения вала". В соответствии с алгоритмом работы этой подпрограммы рассчитываются величины зазоров под датчиками 2 на угле поворота j = 45° при совмещенном центре сечения вала с началом базовой системы координат XOY, соответствующие формы эллипса в сечении вала 1, по выражениям (24). Сравнивают рассчитанные величины зазоров под датчиками 2 (C1, C3, C5, C7) и измеренными величинами зазоров под этими датчиками 2 (C1, C3, C5, C7) после установки под датчиками 2 C2, C4, C6, C8 равных величин зазоров. Если хотя бы одно из равенств (25) не выполняется, варьируют малую полуось эллипса b = R в диапазоне R ± 3 sизм. с шагом DR, например, DR = 0,01мкм. На каждом шаге вариации вычисляют норму разностей (26) и в качестве малой полуоси "b" эллипса принимают значение R(j), которому соответствует минимальная норма разностей. По полученному значению R(j) рассчитывается величина большой полуоси эллипса полуфокусное расстояние "C" и эксцентриситет "e" эллипса в сечении вала 1. На этом работа данной подпрограммы заканчивается. 3. Вычисление координат датчиков 2 линейных перемещений. Для вычисления координат датчиков 2 линейных перемещений выполняют пуск подпрограммы "Вычисление координат датчиков". В результате реализации этой подпрограммы вычисляются и запоминаются координаты датчиков 2 в той системе координат, по осям которой они установлены (в соответствии с выражениями (7), если в сечении вала 1 круг, или в соответствии с выражениями (29), если в сечении вала 1 эллипс). 4. Вычисление координат оси вращения вала 1 на заданном угле поворота. По показаниям измерителя 9 угла поворота вал 1 устанавливают на заданный угол поворота b. С пульта цифрового блока 14 выполняют пуск подпрограммы "Вычисление координат оси вращения вала". В соответствии с алгоритмом этой подпрограммы цифровой блок 14 преобразует сигнал измерителей 3 величины перемещения в цифровые двоичные коды. Двоичные коды величин зазоров под датчиками 2 величины перемещения поступают в память цифрового блока 14. По поступающим кодам величин зазоров рассчитываются расстояния от оснований датчиков до оси вращения (точка) в соответствии с (18) или (33), если сечение вала эллипс. Выполняется решение систем уравнений (9), (10), (11), (12) и отбираются корни уравнений, являющиеся координатами оси вращения вала 1, в соответствии с выражениями (13) - (17). Полученные координаты оси вращения вала 1 сглаживаются по методу наименьших квадратов в соответствии с (19) и (24). Получают точные значения координат оси вращения вала 1 радиальной аэростатической опоры. 5. Вычисление величины радиального смещения оси вращения вала 1 радиальной аэростатической опоры 5 на заданном угле поворота. Для вычисления величины радиального смещения оси вращения вала 1 опоры 5 вал 1 устанавливают на заданный угол поворота b и с пульта цифрового блока 14 выполняют пуск подпрограммы "Вычисление величины радиального смещения оси вращения вала радиальной аэростатической опоры". В соответствии с алгоритмом работы этой подпрограммы цифровой блок 14 по выражению (35) вычисляют величину lb радиального смещения вала 1 относительно ее несмещенного положения.
ДивитисяДодаткова інформація
Автори англійськоюShepelev Anatolii Oleksandrovych, Zinenko Volodymyr Mykolaiovych
Автори російськоюШепелев Анатолий Александрович, Зиненко Владимир Николаевич
МПК / Мітки
МПК: B23B 25/00
Мітки: станків, обертових, виміру, радіального, осі, елементів, зміщення, спосіб
Код посилання
<a href="https://ua.patents.su/13-25726-sposib-vimiru-radialnogo-zmishhennya-osi-obertovikh-elementiv-stankiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб виміру радиального зміщення осі обертових елементів станків</a>
Пристрій для спостережень зміщення гірських порід
Номер патенту: 18240
Опубліковано: 25.12.1997
Автори: Сидоренко Віктор Дмитрович, Здещиц Валерій Максимович
МПК: G01C 15/02
Мітки: порід, гірських, пристрій, спостережень, зміщення
Формула / Реферат:
Устройство для наблюдения смещения горных пород, содержащее основание, отрезки труб, соединенные гибкими элементами, центральную струну с якорем, боковые струны, нижние концы которых прикреплены к стенкам соответствующих отрезков труб, смонтированное с возможностью линейных перемещений по меньшей мере в трех взаимно перпендикулярных направлениях натяжное устройство со стыковочным приспособлением для установки в нем верхнего конца центральной...
Пристрій для контролю кутових деформацій валів обертових об’єктів
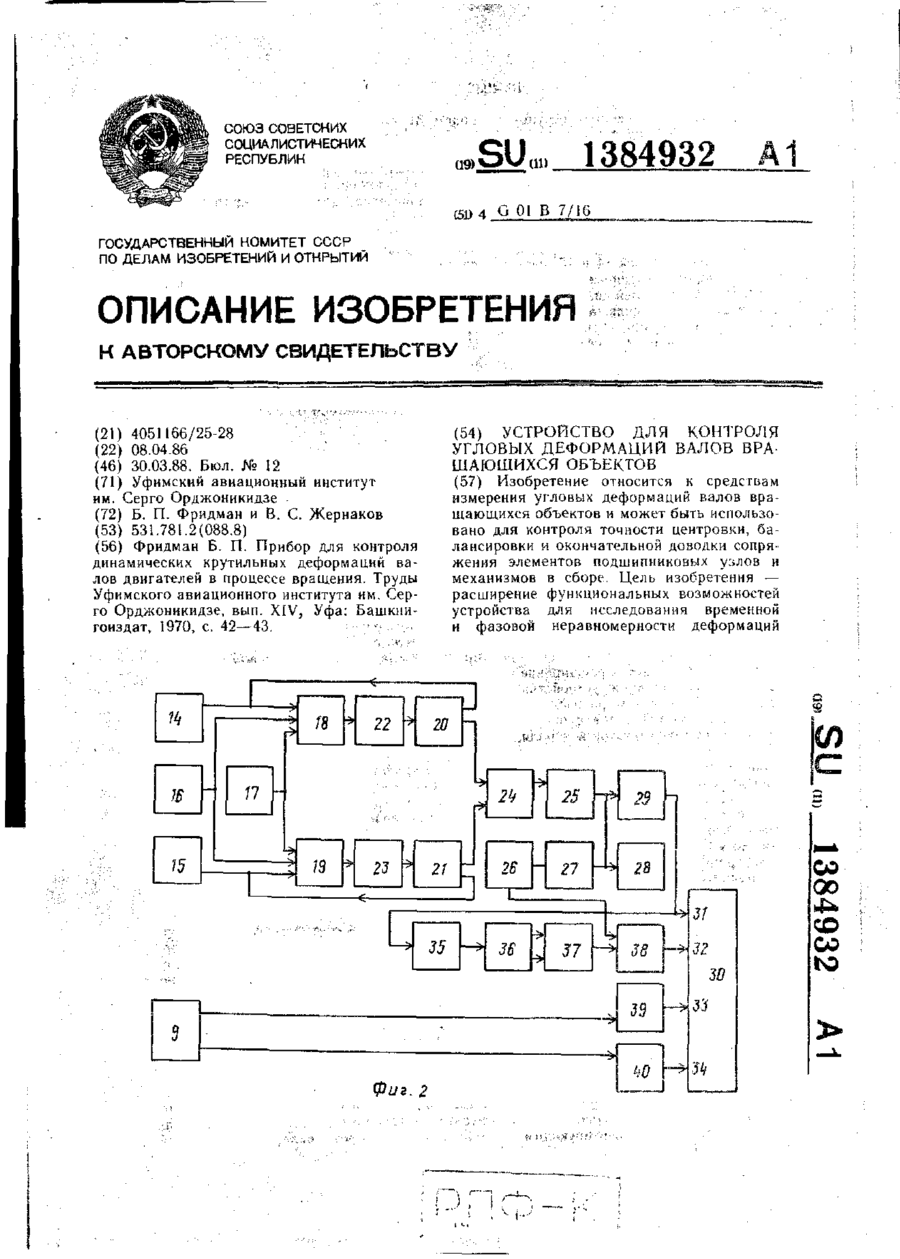
Номер патенту: 12090
Опубліковано: 25.12.1996
Автори: Фрідман Борис Петрович, Жернаков Володимир Сергійович
МПК: G01M 15/00, G01B 7/16
Мітки: контролю, пристрій, обертових, валів, кутових, об'єктів, деформацій
Формула / Реферат:
Устройство для контроля угловых деформаций валов вращающихся объектов, содержащее два диамагнитных диска с закрепленными на периферии кольцами из намагничивающего материала, предназначенные для установки на вал, две магнитные головки стационарно устанавливаемые против колец, стабилизированный блок питания, триггер, дифференцирующий блок, инвертирующий усилитель с прямым и инверсным выходами, вход которого соединен с выходом...
Спосіб обробки поверхні для установлювання опорних елементів опорно-поворотного пристрою гірничотранспортувальних машин
Номер патенту: 1727
Опубліковано: 25.10.1994
Автори: Самохвалов Володимир Костянтинович, Сорока Георгій Митрофанович, Приходько Віталій Петрович
МПК: E02F 9/08
Мітки: опорно-поворотного, елементів, поверхні, пристрою, машин, гірничотранспортувальних, обробки, спосіб, установлювання, опорних
Формула / Реферат:
Способ обработки поверхностей для установки опорных элементов опорно-поворотного устройства горно-транспортной машины, включающий крепление фрезерной головки с круговой и радиальной подачей на базу с зубчатым венцом и с центральной цапфой или на поворотную платформу с основной балкой и механизмом вращения и обработку поверхностей на базе и на поворотной платформе, отличающийся тем, что, с целью снижения стоимости способа при обработке...
В’яжуче для приготування бетонних корпусних деталей станків
Номер патенту: 1547
Опубліковано: 25.07.1994
Автори: Кривенко Павло Васильович, Щербина Лариса Володимирівна, Бродко Оксана Антонівна, Пушкарьова Катерина Костянтинівна, Константинівський Борис Якович
МПК: C04B 7/153
Мітки: в'яжуче, станків, корпусних, приготування, бетонних, деталей
Формула / Реферат:
Вяжущее для изготовления бетонных корпусных деталей станков, включающее шлаковый цемент с модулем основности М0 1-1,2 щелочной компонент и щелочной оксалат, отличающееся тем, что, с целью стабилизации прочности, модуля упругости и жесткости и снижения коэффициента термического расширения бетона, оно дополнительно содержит дегидратированную при 600-900°С цеолитовую породу клиноптилолитовой структуры при следующем соотношении компонентов,...
Пристрій для вимірювання температури обертових об’єктів
Номер патенту: 3667
Опубліковано: 27.12.1994
Автори: Василенко Віктор Іванович, Оніщенко Валентин Павлович
МПК: G01K 13/00
Мітки: температури, об'єктів, вимірювання, пристрій, обертових
Формула / Реферат:
1. Устройство для измерения температуры вращающихся объектов, содержащее установленные на объекте термочувствительные элементы, соединенные через переключатель с входом усилителя, первые излучатель и приемник излучения, установленный на объекте постоянный магнит, два магнитоуправляемых контакта, регистратор, отличающееся тем, что в него введены установленный на объекте вблизи холодных спаев термочувствительных элементов термокомпенсационный...
Попередній патент: Основа для лікарської форми, спосіб її отримання та лікарська форма
Наступний патент: Пристрій компенсації радіальних навантажень на вал радіальної аеростатичної опори
Випадковий патент: Фільтр для очистки рідини