Пристрій компенсації радіальних навантажень на вал радіальної аеростатичної опори
Номер патенту: 25727
Опубліковано: 30.10.1998
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
Формула / Реферат
Устройство компенсации радиальных нагрузок на вал радиальной аэростатической опоры, включающее электрически связанные между собой датчики величин зазоров, измерители величин зазоров, дифференциальные усилители сигналов рассогласования, регуляторы давления, отличающееся тем, что оно снабжено компенсаторами радиального смещения оси вращения вала радиальной аэростатической опоры, расположенными по внешним сторонам системы питающих сопел радиальной аэростатической опоры, причем, каждый компенсатор радиального смещения оси вращения вала радиальной аэростатической опоры включает регуляторы давления газа, смещенные в окружном направлении размещенные во втулке радиальной аэростатической опоры и объединенные в четыре группы регуляторов давления, а также датчики величин зазоров, установленные по осям прямоугольных систем координат, начало отсчета которых размещено на оси симметрии внутренней поверхности втулки радиальной аэростатической опоры, причем, каждый компенсатор радиального смещения оси вращения вала радиальной аэростатической опоры содержит не менее восьми датчиков величин зазоров, устройство также включает цифровой блок, измеритель угла поворота вала, выключатели "работа - выключено", операционные усилители, переключатели "прямое - обратное", дифференциальные усилители сигналов управления, выключатели "включено - выключено", причем, датчики величин зазоров компенсаторов радиального смещения оси вращения вала радиальной аэростатической опоры соединены с входами измерителей величин зазоров, выходы измерителей величин зазоров соединены с входами цифрового блока, а выходы измерителей величин зазоров, входы которых соединены с датчиками величин зазоров, установленных по осям базовых систем координат, начало отсчета которых размещено на оси симметрии внутренней поверхности втулки радиальной аэростатической опоры, соединены также с первыми входами дифференциальных усилителей сигналов рассогласования, выходы измерителя угла поворота вала радиальной аэростатической опоры соединены с входами цифрового блока, вторые входы дифференциальных усилителей сигналов рассогласования соединены с выходами цифрового блока, выходы дифференциальных усилителей сигналов рассогласования через выключатели "работа - выключено" соединены с группами регуляторов давления компенсаторов радиального смещения оси вращения вала радиальной аэростатической опоры, входы операционных усилителей соединены с выходами цифрового блока, выходы операционных усилителей через переключатели "прямое - обратное" соединены с входами дифференциальных усилителей сигналов управления, а их выходы через переключатели "включено - выключено" соединены с группами регуляторов давления компенсаторов радиального смещения оси вращения вала радиальной аэростатической опоры.
Текст
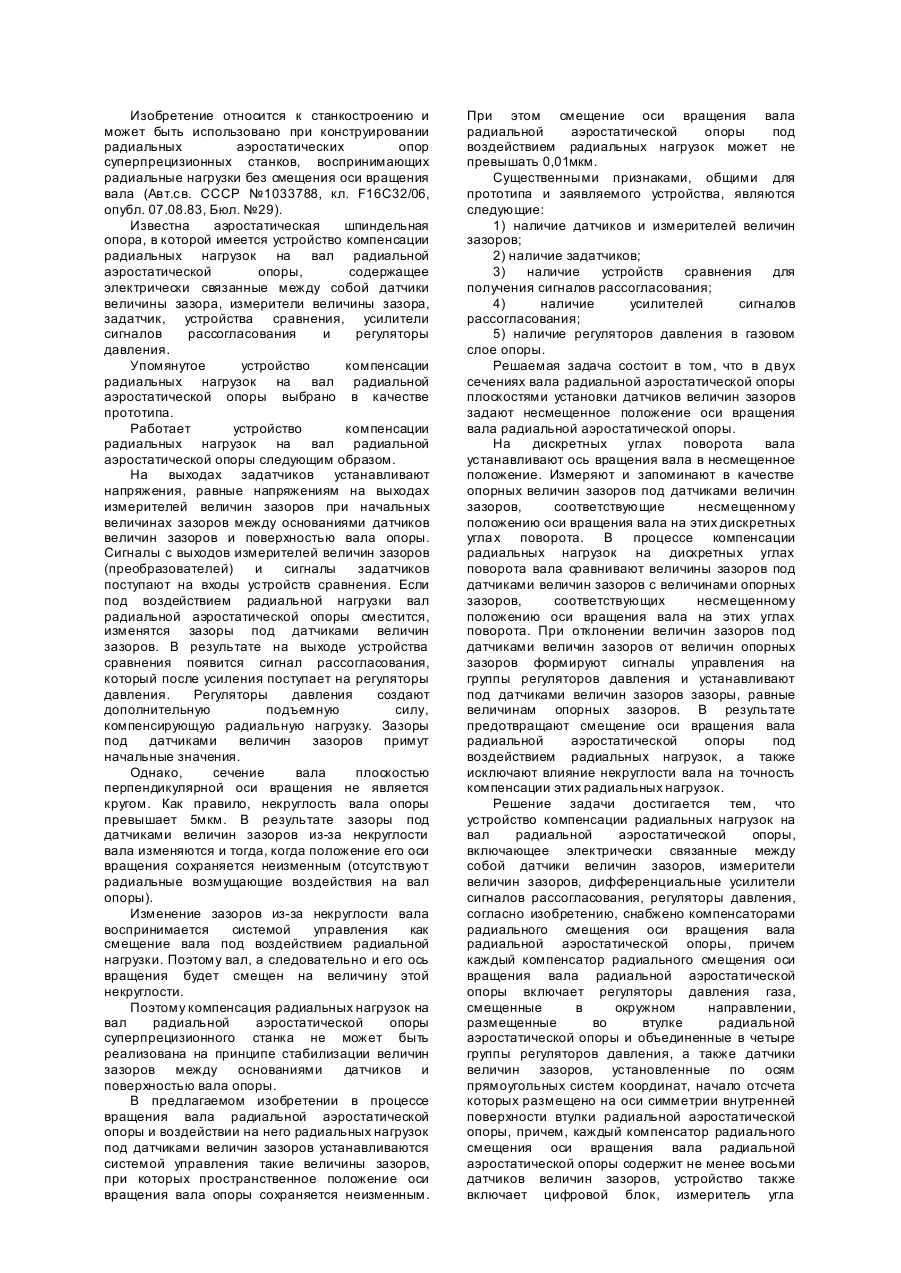
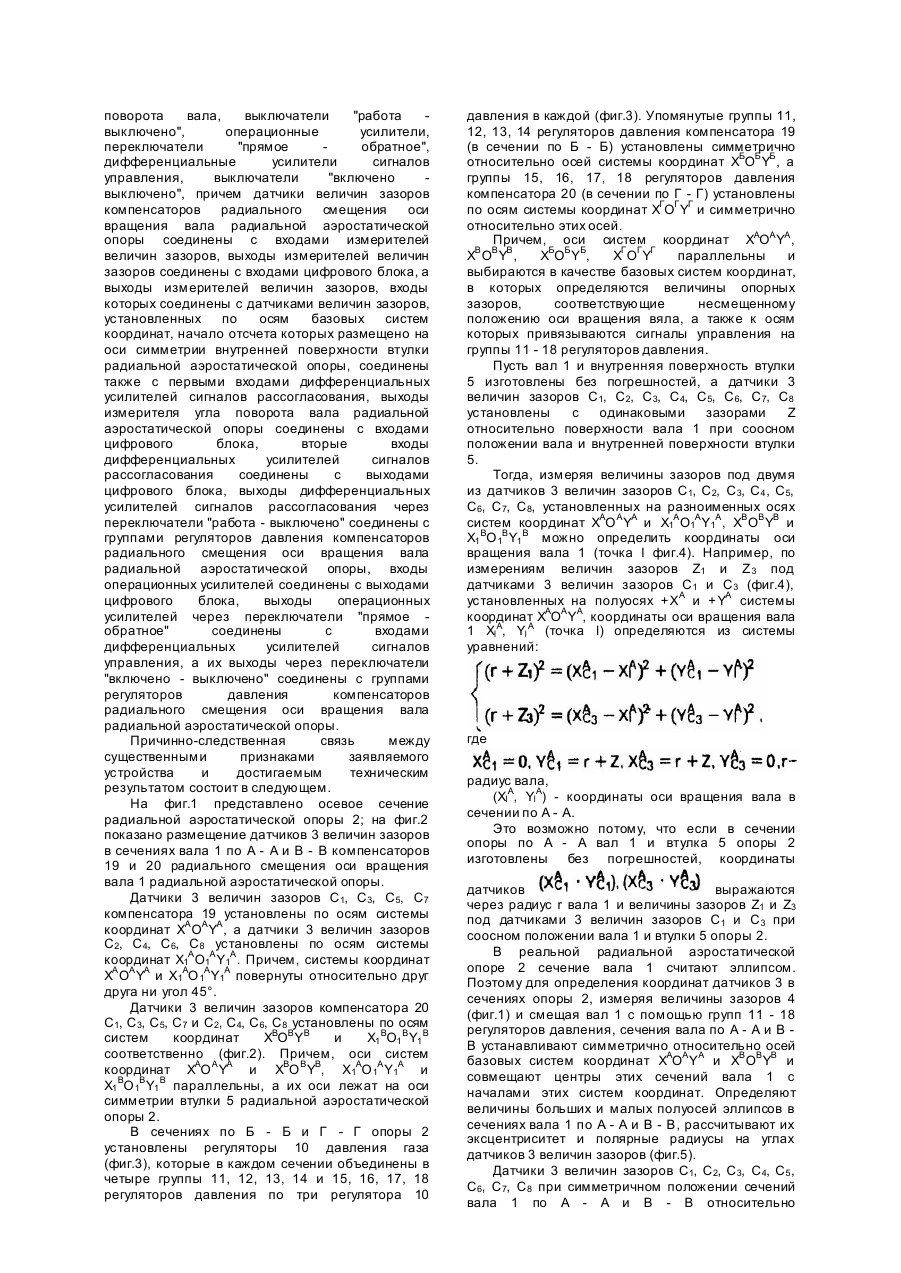
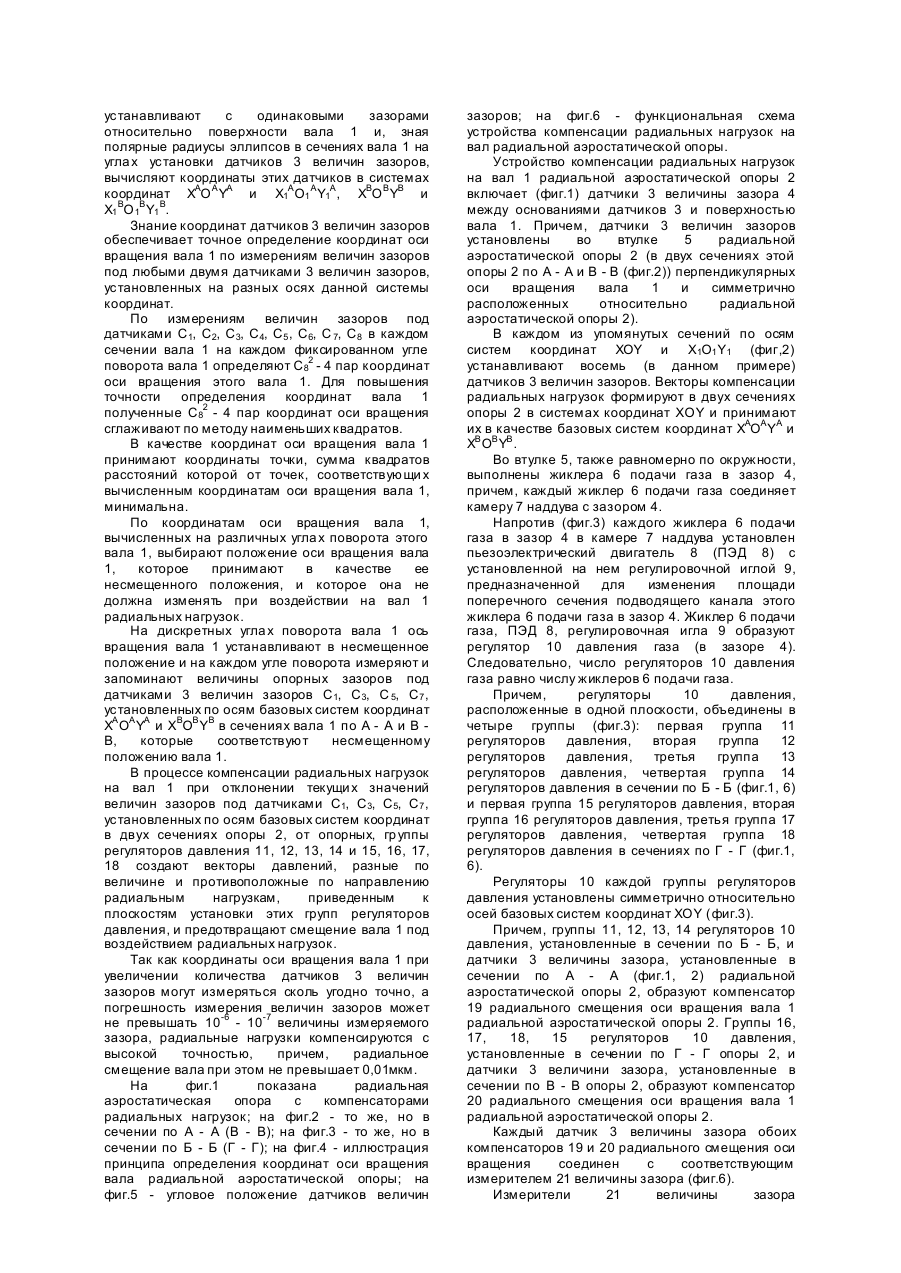
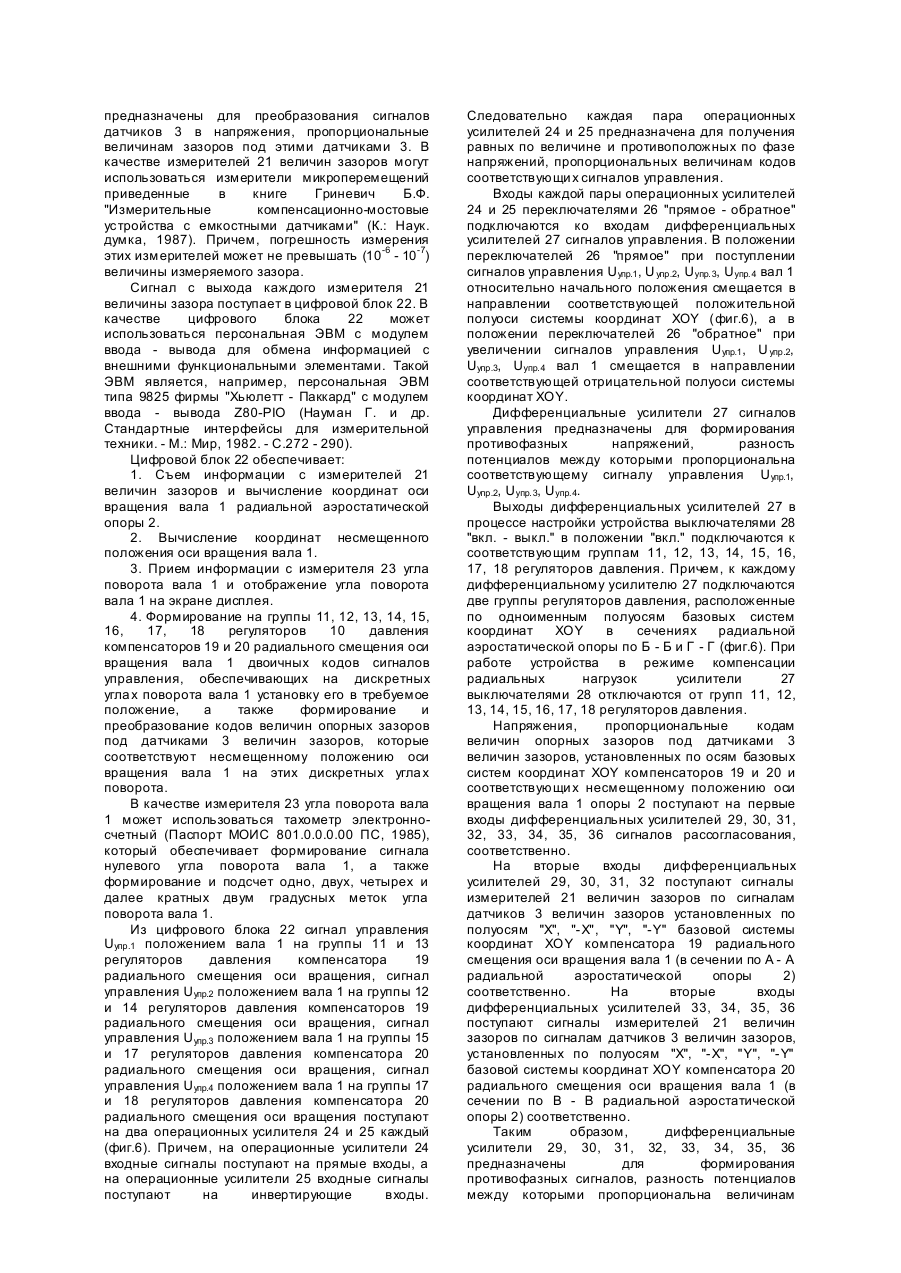
Изобретение относится к станкостроению и может быть использовано при конструировании радиальных аэростатических опор суперпрецизионных станков, воспринимающих радиальные нагрузки без смещения оси вращения вала (Авт.св. СССР №1033788, кл. F16C32/06, опубл. 07.08.83, Бюл. №29). Известна аэростатическая шпиндельная опора, в которой имеется устройство компенсации радиальных нагрузок на вал радиальной аэростатической опоры, содержащее электрически связанные между собой датчики величины зазора, измерители величины зазора, задатчик, устройства сравнения, усилители сигналов рассогласования и регуляторы давления. Упомянутое устройство компенсации радиальных нагрузок на вал радиальной аэростатической опоры выбрано в качестве прототипа. Работает устройство компенсации радиальных нагрузок на вал радиальной аэростатической опоры следующим образом. На выходах задатчиков устанавливают напряжения, равные напряжениям на выходах измерителей величин зазоров при начальных величинах зазоров между основаниями датчиков величин зазоров и поверхностью вала опоры. Сигналы с выходов измерителей величин зазоров (преобразователей) и сигналы задатчиков поступают на входы устройств сравнения. Если под воздействием радиальной нагрузки вал радиальной аэростатической опоры сместится, изменятся зазоры под датчиками величин зазоров. В результате на выходе устройства сравнения появится сигнал рассогласования, который после усиления поступает на регуляторы давления. Регуляторы давления создают дополнительную подъемную силу, компенсирующую радиальную нагрузку. Зазоры под датчиками величин зазоров примут начальные значения. Однако, сечение вала плоскостью перпендикулярной оси вращения не является кругом. Как правило, некруглость вала опоры превышает 5мкм. В результате зазоры под датчиками величин зазоров из-за некруглости вала изменяются и тогда, когда положение его оси вращения сохраняется неизменным (отсутствуют радиальные возмущающие воздействия на вал опоры). Изменение зазоров из-за некруглости вала воспринимается системой управления как смещение вала под воздействием радиальной нагрузки. Поэтому вал, а следовательно и его ось вращения будет смещен на величину этой некруглости. Поэтому компенсация радиальных нагрузок на вал радиальной аэростатической опоры суперпрецизионного станка не может быть реализована на принципе стабилизации величин зазоров между основаниями датчиков и поверхностью вала опоры. В предлагаемом изобретении в процессе вращения вала радиальной аэростатической опоры и воздействии на него радиальных нагрузок под датчиками величин зазоров устанавливаются системой управления такие величины зазоров, при которых пространственное положение оси вращения вала опоры сохраняется неизменным. При этом смещение оси вращения вала радиальной аэростатической опоры под воздействием радиальных нагрузок может не превышать 0,01мкм. Существенными признаками, общими для прототипа и заявляемого устройства, являются следующие: 1) наличие датчиков и измерителей величин зазоров; 2) наличие задатчиков; 3) наличие устройств сравнения для получения сигналов рассогласования; 4) наличие усилителей сигналов рассогласования; 5) наличие регуляторов давления в газовом слое опоры. Решаемая задача состоит в том, что в двух сечениях вала радиальной аэростатической опоры плоскостями установки датчиков величин зазоров задают несмещенное положение оси вращения вала радиальной аэростатической опоры. На дискретных углах поворота вала устанавливают ось вращения вала в несмещенное положение. Измеряют и запоминают в качестве опорных величин зазоров под датчиками величин зазоров, соответствующие несмещенному положению оси вращения вала на этих дискретных угла х поворота. В процессе компенсации радиальных нагрузок на дискретных углах поворота вала сравнивают величины зазоров под датчиками величин зазоров с величинами опорных зазоров, соответствующих несмещенному положению оси вращения вала на этих углах поворота. При отклонении величин зазоров под датчиками величин зазоров от величин опорных зазоров формируют сигналы управления на группы регуляторов давления и устанавливают под датчиками величин зазоров зазоры, равные величинам опорных зазоров. В результате предотвращают смещение оси вращения вала радиальной аэростатической опоры под воздействием радиальных нагрузок, а также исключают влияние некруглости вала на точность компенсации этих радиальных нагрузок. Решение задачи достигается тем, что устройство компенсации радиальных нагрузок на вал радиальной аэростатической опоры, включающее электрически связанные между собой датчики величин зазоров, измерители величин зазоров, дифференциальные усилители сигналов рассогласования, регуляторы давления, согласно изобретению, снабжено компенсаторами радиального смещения оси вращения вала радиальной аэростатической опоры, причем каждый компенсатор радиального смещения оси вращения вала радиальной аэростатической опоры включает регуляторы давления газа, смещенные в окружном направлении, размещенные во втулке радиальной аэростатической опоры и объединенные в четыре группы регуляторов давления, а также датчики величин зазоров, установленные по осям прямоугольных систем координат, начало отсчета которых размещено на оси симметрии внутренней поверхности втулки радиальной аэростатической опоры, причем, каждый компенсатор радиального смещения оси вращения вала радиальной аэростатической опоры содержит не менее восьми датчиков величин зазоров, устройство также включает цифровой блок, измеритель угла поворота вала, выключатели "работа выключено", операционные усилители, переключатели "прямое обратное", дифференциальные усилители сигналов управления, выключатели ''включено выключено", причем датчики величин зазоров компенсаторов радиального смещения оси вращения вала радиальной аэростатической опоры соединены с входами измерителей величин зазоров, выходы измерителей величин зазоров соединены с входами цифрового блока, а выходы измерителей величин зазоров, входы которых соединены с датчиками величин зазоров, установленных по осям базовых систем координат, начало отсчета которых размещено на оси симметрии внутренней поверхности втулки радиальной аэростатической опоры, соединены также с первыми входами дифференциальных усилителей сигналов рассогласования, выходы измерителя угла поворота вала радиальной аэростатической опоры соединены с входами цифрового блока, вторые входы дифференциальных усилителей сигналов рассогласования соединены с выходами цифрового блока, выходы дифференциальных усилителей сигналов рассогласования через переключатели "работа - выключено" соединены с группами регуляторов давления компенсаторов радиального смещения оси вращения вала радиальной аэростатической опоры, входы операционных усилителей соединены с выходами цифрового блока, выходы операционных усилителей через переключатели "прямое обратное" соединены с входами дифференциальных усилителей сигналов управления, а их выходы через переключатели "включено - выключено" соединены с группами регуляторов давления компенсаторов радиального смещения оси вращения вала радиальной аэростатической опоры. Причинно-следственная связь между существенными признаками заявляемого устройства и достигаемым техническим результатом состоит в следующем. На фиг.1 представлено осевое сечение радиальной аэростатической опоры 2; на фиг.2 показано размещение датчиков 3 величин зазоров в сечениях вала 1 по А - А и В - В компенсаторов 19 и 20 радиального смещения оси вращения вала 1 радиальной аэростатической опоры. Датчики 3 величин зазоров C1, C3, C5, C7 компенсатора 19 установлены по осям системы координат XА OА YА , а датчики 3 величин зазоров C2, C4, C6, C8 установлены по осям системы координат X1А O1А Y1А . Причем, системы координат XА OА YА и X1АO 1А Y1А повернуты относительно друг друга ни угол 45°. Датчики 3 величин зазоров компенсатора 20 C1, C3, C5, C7 и C2, C4, C6, C8 установлены по осям систем координат XВOВ YВ и X1 ВO1 В Y1 В соответственно (фиг.2). Причем, оси систем координат XАO А YА и XВO В YВ, X1АO 1А Y1А и X1 ВO 1В Y1 В параллельны, а их оси лежат на оси симметрии втулки 5 радиальной аэростатической опоры 2. В сечениях по Б - Б и Г - Г опоры 2 установлены регуляторы 10 давления газа (фиг.3), которые в каждом сечении объединены в четыре группы 11, 12, 13, 14 и 15, 16, 17, 18 регуляторов давления по три регулятора 10 давления в каждой (фиг.3). Упомянутые группы 11, 12, 13, 14 регуляторов давления компенсатора 19 (в сечении по Б - Б) установлены симметрично относительно осей системы координат XБOБ YБ , a группы 15, 16, 17, 18 регуляторов давления компенсатора 20 (в сечении по Г - Г) установлены по осям системы координат XГOГ YГ и симметрично относительно этих осей. Причем, оси систем координат XАOА YА , В В В X O Y , XБOБ YБ, XГ OГ YГ параллельны и выбираются в качестве базовых систем координат, в которых определяются величины опорных зазоров, соответствующие несмещенному положению оси вращения вяла, а также к осям которых привязываются сигналы управления на группы 11 - 18 регуляторов давления. Пусть вал 1 и внутренняя поверхность втулки 5 изготовлены без погрешностей, а датчики 3 величин зазоров C1, C2, C3, C4, C5, C6, C7, C8 установлены с одинаковыми зазорами Z относительно поверхности вала 1 при соосном положении вала и внутренней поверхности втулки 5. Тогда, измеряя величины зазоров под двумя из датчиков 3 величин зазоров C1, C2, C3, C4 , C5, C6, C7, C8, установленных на разноименных осях систем координат XАO А YА и X1А O1А Y1А , XВ OВ YВ и X1 ВO 1В Y1 В можно определить координаты оси вращения вала 1 (точка l фиг.4). Например, по измерениям величин зазоров Z1 и Z 3 под датчиками 3 величин зазоров C1 и C3 (фиг.4), установленных на полуосях +XА и +YА системы координат XАOА YА, координаты оси вращения вала 1 XlА, Yl А (точка l) определяются из системы уравнений: где радиус вала, (XlА, YlА) - координаты оси вращения вала в сечении по А - А. Это возможно потому, что если в сечении опоры по А - А вал 1 и втулка 5 опоры 2 изготовлены без погрешностей, координаты датчиков выражаются через радиус r вала 1 и величины зазоров Z1 и Z3 под датчиками 3 величин зазоров C1 и C3 при соосном положении вала 1 и втулки 5 опоры 2. В реальной радиальной аэростатической опоре 2 сечение вала 1 считают эллипсом. Поэтому для определения координат датчиков 3 в сечениях опоры 2, измеряя величины зазоров 4 (фиг.1) и смещая вал 1 с помощью групп 11 - 18 регуляторов давления, сечения вала по А - А и В В устанавливают симметрично относительно осей базовых систем координат XАOА YА и XВ OВ YВ и совмещают центры этих сечений вала 1 с началами этих систем координат. Определяют величины больших и малых полуосей эллипсов в сечениях вала 1 по А - А и В - В, рассчитывают их эксцентриситет и полярные радиусы на углах датчиков 3 величин зазоров (фиг.5). Датчики 3 величин зазоров C1, C2, C3, C4, C5 , C6, C7, C8 при симметричном положении сечений вала 1 по А - А и В - В относительно устанавливают с одинаковыми зазорами относительно поверхности вала 1 и, зная полярные радиусы эллипсов в сечениях вала 1 на угла х установки датчиков 3 величин зазоров, вычисляют координаты этих датчиков в системах координат XАO А YА и X1А O1 А Y1А , XВO В YВ и X1 ВO 1В Y1 В. Знание координат датчиков 3 величин зазоров обеспечивает точное определение координат оси вращения вала 1 по измерениям величин зазоров под любыми двумя датчиками 3 величин зазоров, установленных на разных осях данной системы координат. По измерениям величин зазоров под датчиками C1, C2, C3, C4, C5 , C6, C 7, C8 в каждом сечении вала 1 на каждом фиксированном угле поворота вала 1 определяют C82 - 4 пар координат оси вращения этого вала 1. Для повышения точности определения координат вала 1 полученные C82 - 4 пар координат оси вращения сглаживают по методу наименьших квадратов. В качестве координат оси вращения вала 1 принимают координаты точки, сумма квадратов расстояний которой от точек, соответствующи х вычисленным координатам оси вращения вала 1, минимальна. По координатам оси вращения вала 1, вычисленных на различных угла х поворота этого вала 1, выбирают положение оси вращения вала 1, которое принимают в качестве ее несмещенного положения, и которое она не должна изменять при воздействии на вал 1 радиальных нагрузок. На дискретных угла х поворота вала 1 ось вращения вала 1 устанавливают в несмещенное положение и на каждом угле поворота измеряют и запоминают величины опорных зазоров под датчиками 3 величин зазоров C1, C3, C 5, C7 , установленных по осям базовых систем координат XА OА YА и XВOВ YВ в сечениях вала 1 по А - А и В В, которые соответствуют несмещенному положению вала 1. В процессе компенсации радиальных нагрузок на вал 1 при отклонении текущи х значений величин зазоров под датчиками C1, C3, C5, C7 , установленных по осям базовых систем координат в двух сечениях опоры 2, от опорных, гр уппы регуляторов давления 11, 12, 13, 14 и 15, 16, 17, 18 создают векторы давлений, разные по величине и противоположные по направлению радиальным нагрузкам, приведенным к плоскостям установки этих групп регуляторов давления, и предотвращают смещение вала 1 под воздействием радиальных нагрузок. Так как координаты оси вращения вала 1 при увеличении количества датчиков 3 величин зазоров могут измеряться сколь угодно точно, а погрешность измерения величин зазоров может не превышать 10-6 - 10-7 величины измеряемого зазора, радиальные нагрузки компенсируются с высокой точностью, причем, радиальное смещение вала при этом не превышает 0,01мкм. На фиг.1 показана радиальная аэростатическая опора с компенсаторами радиальных нагрузок; на фиг.2 - то же, но в сечении по А - А (В - В); на фиг.3 - то же, но в сечении по Б - Б (Г - Г); на фиг.4 - иллюстрация принципа определения координат оси вращения вала радиальной аэростатической опоры; на фиг.5 - угловое положение датчиков величин зазоров; на фиг.6 - функциональная схема устройства компенсации радиальных нагрузок на вал радиальной аэростатической опоры. Устройство компенсации радиальных нагрузок на вал 1 радиальной аэростатической опоры 2 включает (фиг.1) датчики 3 величины зазора 4 между основаниями датчиков 3 и поверхностью вала 1. Причем, датчики 3 величин зазоров установлены во втулке 5 радиальной аэростатической опоры 2 (в двух сечениях этой опоры 2 по А - А и В - В (фиг.2)) перпендикулярных оси вращения вала 1 и симметрично расположенных относительно радиальной аэростатической опоры 2). В каждом из упомянутых сечений по осям систем координат XOY и X1O1 Y1 (фиг,2) устанавливают восемь (в данном примере) датчиков 3 величин зазоров. Векторы компенсации радиальных нагрузок формируют в двух сечениях опоры 2 в системах координат XOY и принимают их в качестве базовых систем координат XАOА YА и XВ OВ YВ . Во втулке 5, также равномерно по окружности, выполнены жиклера 6 подачи газа в зазор 4, причем, каждый жиклер 6 подачи газа соединяет камеру 7 наддува с зазором 4. Напротив (фиг.3) каждого жиклера 6 подачи газа в зазор 4 в камере 7 наддува установлен пьезоэлектрический двигатель 8 (ПЭД 8) с установленной на нем регулировочной иглой 9, предназначенной для изменения площади поперечного сечения подводящего канала этого жиклера 6 подачи газа в зазор 4. Жиклер 6 подачи газа, ПЭД 8, регулировочная игла 9 образуют регулятор 10 давления газа (в зазоре 4). Следовательно, число регуляторов 10 давления газа равно числу жиклеров 6 подачи газа. Причем, регуляторы 10 давления, расположенные в одной плоскости, объединены в четыре группы (фиг.3): первая группа 11 регуляторов давления, вторая группа 12 регуляторов давления, третья группа 13 регуляторов давления, четвертая группа 14 регуляторов давления в сечении по Б - Б (фиг.1, 6) и первая группа 15 регуляторов давления, вторая группа 16 регуляторов давления, третья группа 17 регуляторов давления, четвертая группа 18 регуляторов давления в сечениях по Г - Г (фиг.1, 6). Регуляторы 10 каждой группы регуляторов давления установлены симметрично относительно осей базовых систем координат XOY (фиг.3). Причем, группы 11, 12, 13, 14 регуляторов 10 давления, установленные в сечении по Б - Б, и датчики 3 величины зазора, установленные в сечении по А - А (фиг.1, 2) радиальной аэростатической опоры 2, образуют компенсатор 19 радиального смещения оси вращения вала 1 радиальной аэростатической опоры 2. Группы 16, 17, 18, 15 регуляторов 10 давления, установленные в сечении по Г - Г опоры 2, и датчики 3 величини зазора, установленные в сечении по В - В опоры 2, образуют компенсатор 20 радиального смещения оси вращения вала 1 радиальной аэростатической опоры 2. Каждый датчик 3 величины зазора обоих компенсаторов 19 и 20 радиального смещения оси вращения соединен с соответствующим измерителем 21 величины зазора (фиг.6). Измерители 21 величины зазора предназначены для преобразования сигналов датчиков 3 в напряжения, пропорциональные величинам зазоров под этими датчиками 3. В качестве измерителей 21 величин зазоров могут использоваться измерители микроперемещений приведенные в книге Гриневич Б.Ф. "Измерительные компенсационно-мостовые устройства с емкостными датчиками" (К.: Наук. думка, 1987). Причем, погрешность измерения этих измерителей может не превышать (10-6 - 10-7) величины измеряемого зазора. Сигнал с выхода каждого измерителя 21 величины зазора поступает в цифровой блок 22. В качестве цифрового блока 22 может использоваться персональная ЭВМ с модулем ввода - вывода для обмена информацией с внешними функциональными элементами. Такой ЭВМ является, например, персональная ЭВМ типа 9825 фирмы "Хьюлетт - Паккард" с модулем ввода - вывода Z80-PIO (Науман Г. и др. Стандартные интерфейсы для измерительной техники. - М.: Мир, 1982. - С.272 - 290). Цифровой блок 22 обеспечивает: 1. Съем информации с измерителей 21 величин зазоров и вычисление координат оси вращения вала 1 радиальной аэростатической опоры 2. 2. Вычисление координат несмещенного положения оси вращения вала 1. 3. Прием информации с измерителя 23 угла поворота вала 1 и отображение угла поворота вала 1 на экране дисплея. 4. Формирование на группы 11, 12, 13, 14, 15, 16, 17, 18 регуляторов 10 давления компенсаторов 19 и 20 радиального смещения оси вращения вала 1 двоичных кодов сигналов управления, обеспечивающих на дискретных угла х поворота вала 1 установку его в требуемое положение, а также формирование и преобразование кодов величин опорных зазоров под датчиками 3 величин зазоров, которые соответствуют несмещенному положению оси вращения вала 1 на этих дискретных угла х поворота. В качестве измерителя 23 угла поворота вала 1 может использоваться тахометр электронносчетный (Паспорт МОИС 801.0.0.0.00 ПС, 1985), который обеспечивает формирование сигнала нулевого угла поворота вала 1, а также формирование и подсчет одно, двух, четырех и далее кратных двум градусных меток угла поворота вала 1. Из цифрового блока 22 сигнал управления Uупр.1 положением вала 1 на группы 11 и 13 регуляторов давления компенсатора 19 радиального смещения оси вращения, сигнал управления Uупр.2 положением вала 1 на группы 12 и 14 регуляторов давления компенсаторов 19 радиального смещения оси вращения, сигнал управления Uупр.3 положением вала 1 на группы 15 и 17 регуляторов давления компенсатора 20 радиального смещения оси вращения, сигнал управления Uупр.4 положением вала 1 на группы 17 и 18 регуляторов давления компенсатора 20 радиального смещения оси вращения поступают на два операционных усилителя 24 и 25 каждый (фиг.6). Причем, на операционные усилители 24 входные сигналы поступают на прямые входы, а на операционные усилители 25 входные сигналы поступают на инвертирующие входы. Следовательно каждая пара операционных усилителей 24 и 25 предназначена для получения равных по величине и противоположных по фазе напряжений, пропорциональных величинам кодов соответствующи х сигналов управления. Входы каждой пары операционных усилителей 24 и 25 переключателями 26 "прямое - обратное" подключаются ко входам дифференциальных усилителей 27 сигналов управления. В положении переключателей 26 "прямое" при поступлении сигналов управления Uупр.1 , U упр.2, Uупр.3, Uупр.4 вал 1 относительно начального положения смещается в направлении соответствующей положительной полуоси системы координат XOY (фиг.6), а в положении переключателей 26 "обратное" при увеличении сигналов управления Uупр.1 , U упр.2, Uупр.3, Uупр.4 вал 1 смещается в направлении соответствующей отрицательной полуоси системы координат XOY. Дифференциальные усилители 27 сигналов управления предназначены для формирования противофазных напряжений, разность потенциалов между которыми пропорциональна соответствующему сигналу управления Uупр.1, Uупр.2, Uупр.3, Uупр.4. Выходы дифференциальных усилителей 27 в процессе настройки устройства выключателями 28 "вкл. - выкл." в положении "вкл." подключаются к соответствующим группам 11, 12, 13, 14, 15, 16, 17, 18 регуляторов давления. Причем, к каждому дифференциальному усилителю 27 подключаются две группы регуляторов давления, расположенные по одноименным полуосям базовых систем координат XOY в сечениях радиальной аэростатической опоры по Б - Б и Г - Г (фиг.6). При работе устройства в режиме компенсации радиальных нагрузок усилители 27 выключателями 28 отключаются от групп 11, 12, 13, 14, 15, 16, 17, 18 регуляторов давления. Напряжения, пропорциональные кодам величин опорных зазоров под датчиками 3 величин зазоров, установленных по осям базовых систем координат XOY компенсаторов 19 и 20 и соответствующи х несмещенному положению оси вращения вала 1 опоры 2 поступают на первые входы дифференциальных усилителей 29, 30, 31, 32, 33, 34, 35, 36 сигналов рассогласования, соответственно. На вторые входы дифференциальных усилителей 29, 30, 31, 32 поступают сигналы измерителей 21 величин зазоров по сигналам датчиков 3 величин зазоров установленных по полуосям "X", "-X", "Y", "-Y" базовой системы координат XOY компенсатора 19 радиального смещения оси вращения вала 1 (в сечении по А - А радиальной аэростатической опоры 2) соответственно. На вторые входы дифференциальных усилителей 33, 34, 35, 36 поступают сигналы измерителей 21 величин зазоров по сигналам датчиков 3 величин зазоров, установленных по полуосям "X", "-X", "Y", "-Y" базовой системы координат XOY компенсатора 20 радиального смещения оси вращения вала 1 (в сечении по В - В радиальной аэростатической опоры 2) соответственно. Таким образом, дифференциальные усилители 29, 30, 31, 32, 33, 34, 35, 36 предназначены для формирования противофазных сигналов, разность потенциалов между которыми пропорциональна величинам отклонений текущи х значений величин зазоров под датчиками 3 величин зазоров, установленных в сечениях по А - А и В - В по осям базовых систем координат XOY от величин опорных зазоров для этих датчиков, соответствующи х несмещенному положению оси вращения вала 1 радиальной аэростатической опоры 2. Напряжения с выходов дифференциальных усилителей 29, 30, 31, 32, 33, 34, 35, 36 сигналов рассогласования через выключатели 37 "работа выкл." в положении "работа" поступают на группы 11, 12, 13, 14, 15, 16, 17, 18 регуляторов давления соответственно. В результате каждая пара 11 и 13, 12 и 14 регуляторов давления в сечении по Б - Б радиальной аэростатической опоры 2, 15 и 17, 16 и 18 в сечении по Г - Г этой опори 2 компенсаторов 19 и 20 радиального смещения оси вращения вала 1 опоры 2 создают вектор давления разный по величине и противоположный по направлению составляющей радиальной нагрузки на вал 1 по соответствующей оси базовых систем координат XOY в сечениях по Б Б и Г - Г радиальной аэростатической опоры 2 и предотвращает смещение оси вращения вала 1 из несмещенного положения вала 1 под воздействием радиальной нагрузки 38 планшайба. Причем, датчики 3 величин зазоров компенсаторов 19 и 20 радиального смещения оси вращения вала 1 радиальной аэростатической опоры 2 соединены с входами измерителей 21 величин зазоров, выходы измерителей 21 величин зазоров соединены с входами цифрового блока 22, а выходы измерителей 21 величин зазоров по датчикам 3 величин зазоров, установленных по осям базовых систем координат дополнительно соединены с входами дифференциальных усилителей 29, 30, 31, 32. 33, 34, 35, 36 сигналов рассогласования, выходы измерителей 23 угла поворота вала 1 соединены с входами цифрового блока 22, выходы цифрового блока 22 соединены с входами дифференциальных усилителей 29, 30, 31, 32, 33, 34, 35, 36 сигналов рассогласования, выходы дифференциальных усилителей 29, 30, 31, 32, 33, 34, 35, 36 сигналов рассогласования через выключатели 37 "работа - выкл." соединены с соответствующими группами 11, 12, 13, 14, 15, 16, 17, 18 регуляторов 10 давления компенсаторов 19 и 20 радиального смещения оси вращения вала 1 радиальной аэростатической опоры 2, входы каждой пары операционных усилителей 24 и 25 соединены с выходами цифрового блока 22, выходы каждой пары операционных усилителей 24 и 25 через переключатели 27 "прямое обратное" соединены с входами соответствующи х дифференциальных усилителей 27 сигналов управления, а их выходы через переключатели 28 "вкл. - выкл." соединены с соответствующими группами 11, 12, 13, 14, 15, 16, 17, 18 регуляторов 10 давления компенсаторов 19 и 20 радиального смещения оси вращения вала 1 радиальной аэростатической опоры 2. Работает устройство компенсации радиальных нагрузок на вал 1 следующим образом. 1. Определяют параметры эллипсов в сечениях вала 1 плоскостями установки датчиков 3 величин зазоров (в сечениях вала 1 по А - А и В - В компенсаторов 19 и 20 радиального смещения). Рассчитывают координаты датчиков 3 величин зазоров (в сечении опоры 2 по А - А) компенсатора 19 радиального смещения, установленных по осям систем координат XАOА YА и X1А O1А Y1А и координаты датчиков 3 величин зазоров (в сечении вала 1 по В - В) компенсатора 20 радиального смещения, установленных по осям систем координат XВO В YВ и X1ВO 1В Y1В. 1.1 Определяют параметры эллипса в сечении вала 1 плоскостью установки датчиков 3 величин зазоров (в сечении по А - А фиг. 1) компенсатора 19 радиального смещения оси вращения. Рассчитывают координаты датчиков 3 величин зазоров (в сечении вала 1 по А - А) компенсатора 19 радиального смещения. Для выполнения этих действий с пульта цифрового блока 22 выполняют пуск подпрограммы "Индикация величин зазоров". В соответствии с алгоритмом работы этой подпрограммы цифровой блок 22 с заданной частотой опрашивает измерители 22 величин зазоров и преобразует их вы ходные напряжения в цифровые двоичные коды, которые в десятичном коде отображаются на экране дисплея. Кроме того, цифровой блок 22 считывает двоичный код текущего значения угла поворота вала 1 (со счетчика измерителя 23 угла поворота), который также преобразуется в десятичный код и'отображается на экране дисплея. Переключатель 37 "работа выкл." устанавливают в положение "выкл." и отключают дифференциальные усилители 29, 30, 31, 32, 33, 34, 35, 36 сигналов рассогласования от группы 11, 12, 13, 14, 15, 16, 17, 18 регуляторов давления компенсаторов 19 и 20 радиального смещения оси вращения. Выключатели 28 "вкл. - выкл." устанавливают в положение "вкл." и подключают выходы дифференциальных усилителей 27 сигналов управления к соответствующим группам 11, 12, 13, 14 и 15, 16, 17, 18 регуляторов давления. Сечение вала 1 устанавливают симметрично оси "X" базовой системы координат XАOА YА . Для этого на произвольном угле поворота вала 1 под датчиками 2 величин зазоров C1 и C5 компенсатора 19 радиального смещения, установленных по полуосям "+Y" и "-Y" системы координат XАOА YА в сечении вала 1 по А - А, устанавливают разные величины зазоров Z1(0) = Z5(0) (фиг.2). Если для этого вал 1 необходимо смещать в направлении полуоси "+Y" переключатель 26 "прямое - обратное" цепи управления группами 11 и 13 регуляторов давления компенсатора 19 радиального смещения, установленных по осям "+Y" и "-Y" в сечении вала 1 по Б - Б, устанавливают в положение "больше". Если вал 1 для установки разных величин зазоров необходимо смещать в направлении полуоси "-Y" переключатель 26 устанавливают в положение "меньше". На пульте цифрового блока 22 набирают код сигнала управления Uупр.1(0) на группы 11 и 13 регулятора давления компенсатора 19 радиального смещения оси вращения и выполняют пуск подпрограммы "Установка вала 1". В соответствии с алгоритмом работы этой подпрограммы сигнал управления Uупр.1(0) из цифрового блока 22 поступает на прямой вход операционного усилителя 24 и на инвертирующий вход операционного усилителя 25 групп 11 и 13 регуляторов давления. Равные по величине и противоположные по фазе напряжения с выходов операционных усилителей 24 и 25 через переключатель 26 поступают на входы соответствующего дифференциального усилителя 27 сигналов управления, выходы которого через переключатели 28 в положении "вкл." подключены к группам 11 и 13 регуляторов давления компенсатора 19 радиального смещения. Причем, пьезоэлектрические двигатели 8 регуляторов 10 давления газа групп 11 и 13 регуляторов давления к выходам дифференциального усилителя 27 подключены в противофазе. Поэтому в положении переключателя 26 "прямое" при поступлении напряжения с дифференциального усилителя 27 ПЭД 8 регуляторов 10 давления группы 11 регуляторов давления удлиняются, а ПЭД 8 регуляторов давления группы 13 регуляторов давления укорачиваются. Давление на выходах регуляторов 10 группы 11 регуляторов давления уменьшается, а на выходах регуляторов 10 группы 13 регуляторов давления увеличивается. В результате вал 1 сместится в направлении полуоси "+Y" на величину, пропорциональную значению кода сигнала управления Uупр.1(0). Для смещения вала 1 в направлении полуоси "-Y" переключатель 26 "прямое - обратное" устанавливают в положение "обратное". С пульта цифрового блока 22 выполняют пуск подпрограммы "Индикация величин зазоров". С экрана дисплея считывают величины зазоров Z1(0) и Z5(0) и сравнивают и х. Если Z1(0) ¹ Z 5(0), изменяют величину кода сигнала управления Uупр.1(0), и, выполняя пуски подпрограммы "Установка вала 1", методом последовательных приближений добиваются выполнения равенства Z1(0) = Z 5(0). Код сигнала управления Uупр.1(0), при котором выполняется это равенство, запоминают. Не изменяя положения вала 1 считывают с экрана дисплея и запоминают величины зазоров Z3(0) и Z7(0) под датчиками 3 величин зазоров, установленных по полуосям "+X" и "-X" системы координат XАOА YА в сечении по А - А радиальной аэростатической опоры 2. С дискретностью Dj устанавливают вал 1 относительно начального угла поворота на углы поворота Dj, 2 × Dj, 3 × Dj, k × Dj, ..., 360° - Dj. На каждом угле поворота k × Dj (k = 1, 2, 3, ...) смещают вал 1 и под датчиками 3 величин зазоров компенсатора 19 радиального смещения, установленных по полуосям "+Y" и "-Y" базовой системы координат XАOА YА в сечении по А - А опоры 2, устанавливают равные величины зазоров Z1(k × Dj) = Z 5(k × Dj). Для установки равных величин зазоров Z1(k × Dj) = Z 5(k × Dj) под датчиками 3 величин зазоров, установленных по полуосям "+Y" и "-Y" базовой системы координат XАO А YА компенсатора 19 радиального смещения (в сечении по А - А опоры 2) выполняют те же действия, что и при установке равных величин зазоров Z1(0) и Z5(0) на начальном угле поворота вала 1. Сигнал управления Uупр.1 (k × Dj), при котором выполняется неравенство Z1(k × Dj) = Z5(k × Dj), запоминают. На угла х поворота вала 1 j = k × Dj, не изменяя сигналы управления Uупр.1(k × Dj), под датчиком 3 величины зазора C7 компенсатора 19 смещения, установленного по полуоси "-X" системы координат XАO А YА, устанавливают величину зазора Z7(k × Dj) = Z 7(0). Для этого на пульте цифрового блока 22 набирают код сигнала управления Uупр.2(k × Dj) на группы 12 и 14 регуляторов давления компенсатора 19 радиальных нагрузок и выполняют пуск подпрограммы "Установка вала 2". В соответствии с алгоритмом работы этой подпрограммы сигнал управления Uупр.2(k × Dj) из цифрового блока 22 поступает на прямой вход операционного усилителя 24 и инвертирующий вход операционного усилителя 25 групп 12 и 14 регуляторов давления. Равные по величине и противоположные по фазе напряжения с выходов операционных усилителей 24 и 25 через переключатель 26 поступают на вход дифференциального усилителя 27 сигналов управления, выходы которого через переключатель 28 в положении "вкл." подключены к группам 12 и 14 регуляторов давления компенсатора 19 радиального смещения оси вращения вала 1 радиальной аэростатической опоры 2. Причем, пьезоэлектрические двигатели 8 регуляторов 10 давления групп 12 и 14 регуляторов давления к выходам дифференциального усилителя 27 подключены к противофазе. Поэтому в положении переключателя 26 "прямое" при поступлении напряжения с дифференциального усилителя 27 ПЭД 8 регуляторов 10 давления группы 14 регуляторов давления укорачиваются. Давление на выходах регуляторов 10 давления группы 12 регуляторов давления уменьшается, а на выходах регуляторов 10 группы 14 регуляторов давления увеличивается, В результате вал 1 сместится в направлении полуоси "+X" на величину, пропорциональную значению кода сигнала управления Uупр.2(k × Dj). Если для выполнения равенства Z7(k × Dj) = Z7(0) вал 1 необходимо смещать в направлении полуоси "-X", переключатель 30 "прямое обратное" устанавливают в положение "обратное". С пульта цифрового блока 22 выполняют пуск подпрограммы "Индикация величин зазоров". С экрана дисплея считывают величину зазора Z7(k × Dj) и сравнивают ее с величиной зазора Z7(0). Если Z7(k × Dj) ¹ Z7(0), изменяют величину кода сигнала управления Uупр.2(k × Dj), и, выполняя пуски подпрограммы "Установка вала 2", методом последовательных приближений добиваются выполнения равенства Z7(k × Dj) = Z7(0). Сигнал управления Uупр.2(k × Dj), при котором достигается выполнение равенства Z7(k × Dj) = Z 7(0) запоминают. Не изменяя сигналов управления Uупр.1(k × Dj) и Uупр.2(k × Dj) выполняют пуск подпрограммы "Индикация величины зазоров". Считывают с экрана дисплея и запоминают величину зазора Z3(k × Dj) под датчиком 2 величины зазора компенсатора 19 осевого смещения, установленного по полуоси "+X" системы координат XА OА YА (в сечении по А - А опоры 2). После получения величин зазоров Z3(k × Dj) под датчиком 3 величины зазора (датчик C 3) на всех дискретных угла х поворота вала 1 устанавливают вал 1 на угол поворота j = k × Dj, для которого величина зазора Z3(k × Dj) = min. На пульте цифрового блока 22 набирают коды сигналов управления Uупр.1(k × Dj) и U упр.2(k × Dj), при которых выполнялось равенство Z1(k × Dj) = Z5(k × Dj), a Z 3(k × Dj) = min и выполняют пуск подпрограммы "Установка 1" и "Установка вала 2". В результате группы 11, 12, 13, 14 регуляторов давления компенсаторов 19 радиального смещения установят вал 1 в положение, при котором выполняется: Z1(k × Dj) = Z5(k × Dj), Z3(k × Dj) = min. Поочередно выполняя пуски подпрограмм "Индикация величин зазоров" и "Установка вала 1" и изменяя сигнал Uупр.1(k × Dj) на группы 11 и 13 регуляторов давления компенсатора 19 радиального смещения устанавливают под датчиком 3 величины зазора (датчик C1) компенсатора 19 осевого смещения, установленного по полуоси "+Y" базовой системы координат XА OА YА зазор, равный Z1(k × Dj)/2. Измеряют в этом положении вала 1 зазоры Z3°(k × Dj) и Z7°(k × Dj), вычисляют и запоминают сумму s° = Z3°(k × Dj) + Z7°(k × Dj), а также начальный сигнал управления U°упр.1(k × Dj), обеспечивающий установку под датчиком 3 величины зазора C 1 величину зазора, равную Z 1(k × Dj)/2. С шагом Dy смещают вал 1 в направлении полуоси "-Y" базовой системы координат XАOА YА на величину Z1(k × Dj). На каждом j - м шаге смещения вала 1 вычисляют сумму s j = Z3j(k × Dj) + Z7j(k × Dj) и запоминают сигнал управления Uупр.1j(k × Dj), задающий положение вала 1 по оси "Y" на j - ом шаге. После перемещения вала 1 из начального положения на величину Z1(k × Dj) определяют сигнал управления Uупр.1j(k × Dj), соответствующий сумме sj = min. На пульте цифрового блока 22 набирают код сигнала управления Uупр.1j(k × Dj) и выполняют пуск подпрограммы "Установка вала 1". В результате сечение вала 1 будет установлено симметрично относительно оси "X" базовой системы координат XАOА YА. При этом большая ось эллипса в сечении вала 1 по А - А буде т лежать на оси "X" базовой системы координат XАOА YА (фиг.5). Сечение по А - А вала 1 устанавливают симметрично оси "Y" базовой системы координат XА OА YА . Для этого не изменяя угла поворота вала 1 смещают его по оси "X" базовой системы координат XА OА YА в сечении вала 1 по А - А в пределах величины ±Z3(k × Dj)/2 с шагом Dx. На каждом j - ом шаге смещения вале 1 по оси "X" измеряют величины зазоров Z1j(k × Dj) и Z 5j(k × Dj) под датчиками 3 величин зазоров компенсатора 19 радиального смещения, установленных по оси "Y" базовой системы координат XАO А YА, и вычисляют и х сумму. Оставляют вал 1 в положении, при котором сумма s j = Z1j(x × Dj) + Z5j(k × Dj) = min и устанавливают вал 1 симметрично относительно оси "Y" базовой системы координат XАOА YА. Не изменяя положения вала 1 под всеми датчиками 3 величин зазоров компенсатора 19 радиального смещения, смещая их по высоте зазора, устанавливают равные величины зазоров Z1 = Z2 = Z 3 = Z4 = Z 5 = Z6 = Z 7 = Z8 = Zнач. В результате выполнения приведенных выше действий на угле j = k × Dj поворота вала 1, на котором был достигнут минимум величины зазора Z3 = (k × Dj) = min, центр сечения вала 1 по А - А совмещают с началом базовой системы координат XА OА YА , а само сечение вала 1 по А - А устанавливают симметрично относительно осей этой системы координат XАO А YА. Центр эллипса в сечении вала 1 плоскостью установки датчиков 3 величин зазоров (в сечении вала 1 по А - А) принимают в качестве точки, оси вращения вала 1, координаты которой должны оставаться неизменными в системе координат XА OА YА при воздействии на вал 1 радиальных нагрузок. Угол j = k × Dj поворота вала 1 принимают в качестве начала отсчета угла поворота вала 1 в процессе компенсации радиальных нагрузок (j = 0). Определяют эксцентриситет эллипса в сечении вала 1 по А - А (в плоскости установки датчиков 3 величин зазоров компенсатора 19 радиального смещения). Для этого по сигналам измерителя 23 угла поворота вала 1 устанавливают вал 1 на угол поворота j = 90°. Поочередно выполняя пуски подпрограмм "Индикация величин зазоров" и "Установка вала 1" или "Установка вала 2" по описанной выше методике под датчиками 3 величин зазоров C1 и C5, C3 и C7 компенсатора 19 радиального смещения, установленных по осям базовой системы координат XАOА YА (фиг.5), устанавливают равные величины зазоров: и устанавливают осевое сечение вала 1 симметрично осям базовой системы координат XА OА YА . He изменяя углового положения вала 1 и считая, что сечение вала 1 по А - А имеет форму эллипса, малая полуось которого равна радиусу R вала 1, вычисляют эксцентриситет этого эллипса. Для этого в цифровой блок 22 вводят значение радиуса R вала 1 и выполняют пуск подпрограммы "Вычисление эксцентриситета". В соответствии с алгоритмом работы этой подпрограммы цифровой блок 22 преобразует сигнал измерителя 21 величины зазора по сигналу датчика 3 величины зазора, установленного по полуоси "+Y" базовой системы координат XАOА YА в цифровой код и вычисляют величину большой полуоси эллипса: где Z1j = 0 - величина зазора под датчиком 3 величины зазора C1 на полуоси "+Y" базовой системы координат XАO А YА на н улевом угле поворота вала 1, Вычисляется полуфокусное расстояние "C" в сечении вала 1 по А - А: рассчитывается и запоминается эксцентриситет "e" этого эллипса. В силу того, что вал 1 радиальной аэростатической опоры 2 изготавливается с погрешностями размеров и формы, уточняют величину малой полуоси эллипса "b", принятой равной величине радиуса R вала 1, а, следовательно, уточняют форму эллипса в сечении вала 1 по А - А. Для уточнения формы эллипса в сечении вала 1 по А - А вал 2 устанавливают на угол поворота j = 45°. Тогда вершина эллипса "d" (фиг.5) переместится под центр основания датчика 3 величины зазора C2. Смещают вал 1 и на угле поворота j = 45° устанавливают под датчиками 3 величин зазоров C2 и C6, C4 и C8 компенсатора 19 осевого смещения равные величины зазоров Для этого, как и ранее, выполняют пуск подпрограммы "Установка вала 1" и "Установка вала 2". Так как датчики 3 величин зазоров C1 - C8 на угле поворота вала 1 j = 0 были установлены с одинаковыми зазорами Z1 = Z 2 = Z 3 = Z4 = Z5 = Z6 = Z7 = Z 8 до поверхности вала 1, когда центр эллипса (в сечении вала 1 по А - А) уже был совмещен с началом базовой системы координат XА OА YА , а его полуоси были совмещены с осями базовой системы координат XАOА YА , центр эллипсе в сечении вала 1 по А - А после установки под датчиками C2 и C6, C4 и C8 равных величин зазоров будет совпадать с началом базовой системы координат XА OА YА . Тогда, если малая полуось эллипса "b" равна R вала 1, под датчиками 3 величин зазоров C1, C3, C5, C7 (фиг.5) зазоры He изменяя положение вала 1, на угле повороте j = 45° выполняют пуск подпрограммы "Индикация величин зазоров", считывают с экрана дисплея величины зазоров под датчиками 3 величин зазоров C1, C3, C5, C7 и сравнивают их с расчетными значениями величин зазоров, которые должны быть под этими датчиками 3, если малая полуось эллипса "b" равна R: Если эти равенства не выполняются, предположение о равенстве малой полуоси эллипса "b" расчетному значению радиуса R вала неверно. Для определения истинного значения малой полуоси эллипса "b", а, следовательно, и формы сечения вала 1 по А - А выполняют пуск подпрограммы "Расчет малой полуоси эллипса". В соответствии с алгоритмом работы данной подпрограммы варьируется значение радиуса R вала 1 в диапазоне R ± 3sизм., где sизм. среднеквадратическая погрешность инструмента, которым измерялся радиус R вала 1 с шагом, например, DR = 0,01мкм. Для каждого j - го значения радиуса R(j) рассчитываются новые параметры эллипса a(j), c(j), e(j) и величины зазоров под датчиками 3 величин зазоров, соответствующие этим параметрам должны принять следующие значения: Вычисляется разность по норме: В качестве малой полуоси эллипса "b" принимают то значение R(j) вала 1, которому соответствует минимальная норма. Рассчитывают новое значение большой полуоси эллипса Для получения расчетных величин зазоров с пульта вычислителя 22 выполняют пуск подпрограммы "Расчет величин зазоров". В соответствии с алгоритмом работы этой подпрограммы по приведенным выше выражениям рассчитываются и запоминаются величины зазоров полуфокусное расстояние "c", а также эксцентриситет эллипса "e" в сечении вала 1. 1.2. Вычисляют координаты датчиков 3 величин зазоров компенсатора 19 радиального смещения, установленных по осям базовой системы координат XАOА YА (C1, C3, C5 , C7 фи г.5, 6) и по осям системы координат XА OА YА (C2, C4 , C6, C8 фиг.5, 9). Для выполнения этих действий с пульта цифрового блока 22 выполняют пуск подпрограммы "Вычисление координат датчиков". Исходными данными для работы подпрограммы являются: 1. Zнач. - величина зазора, с которым были установлены датчики 3 величины зазора (C1, C2, C3, C4, C5 , C6, C7 , C8) относительно поверхности вала 1 на угле j =0 поворота вала 1 и совмещенном центре сечения вала 1 по А - А с началом базовой системы координат XАO А YА. 2. Углы a i установки датчиков 3 величин зазоров Ci (i =1, 2, 3, 4, 5, 6, 7, 8) относительно полуоси "+X" базовой системы координат XА OА YА . В соответствии с алгоритмом работы данной подпрограммы вычисляются полярные радиусы эллипса в сечении вала 1 по А - А Рассчитываются и запоминаются координаты датчиков 3 величин зазоров C1, C2, C3 , C4 , C5 , C6 , C7, C8 в системах координат XАOА YА и X1 АO 1А Y1 А: 1.3. Определяют параметры эллипса в сечении вала 1 плоскостью установки датчиков 3 величин зазоров (в сечении по В - В фиг.1) компенсатора 20 радиального смещения оси вращения вала 1 радиальной аэростатической опоры 2. Рассчитывают координаты датчиков 3 величин зазоров компенсатора 20 радиального смещения оси вращения. Для выполнения этих действий п.1.1 и п.1.2 выполняют для компенсатора 20 радиального смещения оси вращения. При этом сигналы управления Uупр.3(k × Dj) и Uупр.4(k × Dj) на группы 15, 16, 17, 18 регуляторов давления поступают при выполнении подпрограмм "Установка вала 3" и "Установка вала 4" соответственно. Получают: aВ - величину большой полуоси эллипса в сечении вала 1 плоскостью установки датчиков 3 величин зазоров компенсатора 20 радиального смещения оси вращения (в сечении вала 1 по В В), CВ - полуфокусное расстояние эллипса в сечении вала 1 плоскостью установки датчиков 3 величин зазоров компенсатора 20 радиального смещения (в сечении вала 1 по В - В). eВ - эксцентриситет эллипса (в сечении вала 1 по В - В). Координаты датчиков 3 величин зазоров C1, C2, C3, C4, C 5, C6, C 7, C8, установленных по осям базовой системы координат XВ OВ YВ и системы координат X1ВO 1В Y1В компенсатора 20 радиального смещения имеют следующие значения: 2. В сечениях вала 1 плоскостями установки датчиков 3 величин зазоров компесаторов 19 и 20 радиального смещения оси вращения в базовых системах координат XАOА YА и XВOВ YВ определяют координаты несмещенного положения оси вращения вала 1, проходящей через центры эллипсов в упомянутых сечениях вала 1. 2.1. В сечении вала 1 плоскостью установки датчиков 3 величин зазоров компенсатора 19 радиального смещения в базовой системе координат XАOА YА определяют точку, координаты которой принимают в качестве координат несмещенного положения оси вращения вала 1 радиальной аэростатической опоры 2, проходящую через центры эллипсов в сечениях вала 1 по А - А и В - В. Для выполнения названных действий снимают давление наддува с групп 11, 12, 13, 14, 15, 16, 17, 18 регуляторов давления и исключают их влияние на положение вала 1 радиальной аэростатической опоры. Устанавливают вал 1 на угол поворота j = 0. Измеряют и запоминают величины зазоров Z1А(j1 =0), Z2А(j1 =0), Z 3А(j 1 =0), Z4А(j 1 =0), Z5А(j 1 =0), Z6А(j 1 =0), Z7А(j 1 =0), Z8А(j 1 =0) под датчиками З величин зазоров, установленных по осям базовой системы координат XАO А YА и системы координат X1 АO 1А Y1 А в сечении по А - А радиальной аэростатической опоры 2. Для этого с пульта цифрового блока 22 выполняют пуск подпрограммы "Измерение зазоров". В соответствии-с алгоритмом работы этой подпрограммы цифровой блок 22 последовательно преобразует выходные сигналы измерителей 21 величин зазоров в цифровые двоичные коды и запоминает их. 2.2. По измерениям величин зазоров под парой датчиков 3 величин зазоров не лежащих на одной оси каждой из систем координат XАOА YА и X1 АO 1А Y1 А (фиг.4) составляют C82 - 4 = 24 системы алгебраических уравнений второй степени: где - величины полярных радиусов эллипса в сечении вала 1 по А - А в направлении N - го и M - го датчиков величин зазоров при повороте вала вычисляемые по формуле: на угол j0 и a N и a M - углы установки N - го и M - го датчиков 3 величин зазоровв системе координат XА OА YА , a b - угол_поворота вала 1, - в данном примере реализации устройства. ZNА(j0), ZMА(j0) - величины зазоров под N - ым и M - ым датчиками 3 величин зазоров, измеренные на угле j0 поворота вала 1, - координаты N - го и M - го датчиков в той системе координат XАOА YА или X1 АO1 А Y1А , по осям которой они установлены, XiА, YiА - координаты оси вращения вала 1 в базовой системе координат XАO А YА (в сечении по А - А вала 1). В результате решения упомянутых уравнений получают 24 пары координат XiА , YiА оси вращения вала 1 в сечении опоры 2 по А - А. Для выполнения этих действий с п ульта цифрового блока 22 выполняют пуск подпрограммы "Вычисление координат оси вращения вала". В соответствии с алгоритмом работы этой подпрограммы по измерениям величин зазоров, выполненных в п.2.1 цифровой блок 22 решает 24 системы уравнений и запоминает 24 пары координат оси вращения вала 1 Отклонение этих координат от истинных координат оси вращения вала 1 на угле j = 0 поворота определяется погрешностями определения координат датчиков 3 величин зазоров, погрешностями определения параметров эллипса в сечении вала 1 и погрешностями измерения величин зазоров. Для точного определения координат оси вращения вала 1 на угле j =0 его поворота выполняют пуск подпрограммы "Оценка координат оси вращения вала". В соответствии с алгоритмом работы этой подпрограммы 24 пары координат оси вращения вала 1 сглаживаются по методу наименьших квадратов и получают точные координаты поворота j = 0; оси вращения вала 1 на угле 2.3. Вал 1 аэростатической опоры 2 по показаниям измерителя 23 угла поворота последовательно устанавливают на углы поворота j2 = Dj1, j3 = 2 × Dj1, j3 = 3 × Dj1 , ..., j k = × Dj1 , ..., j k = k × Dj1 . На каждом дискретном значении угла поворота вала 1 выполняют действия, приведенные в п.2.2 и получают (k - 1) оценку координат оси вращения вала 1 опоры 2 в плоскости установки датчиков 3 величин зазоров компенсатора 19 радиального смещения оси вращения вала радиальной аэростатической опоры: 2.4. В плоскости установки датчиков 3 величин зазоров компенсатора 19 радиального смещения (в сечении по А - А опоры 2) определяют координаты Xi, Yi начального положения оси вращения вала 1 радиальной аэростатической опоры 2 как координаты точки в базовой системе координат XАOА YА сумма квадратов расстояний которой от "K" пар координат оси вращения вала 1 на дискретных угла х поворота буде т наименьшей: Координаты Xi, Yi начального положения оси вращения вала 1 принимают в качестве координат несмещенного положения оси вращения вала 1 радиальной аэростатической опоры 2. Для выполнения этих действий с пульта цифрового блока 22 выполняют пуск подпрограммы "Вычисление координат несмещенного положения оси вращения вала". Алгоритм работы этой подпрограммы реализует следующие выражения для расчета несмещенных координат XiА, YiА оси вращения вала 1 (в сечении по А - А опоры 2): Координаты XiА, YiА запоминаются. 2.5. В сечении вала 1 плоскостью установки датчиков 3 величин зазоров компенсатора 20 радиального смещения оси вращения вала 1 в базовой системе координат XВOВ YВ определяют координаты несмещенного положения оси вращения вала 1 радиальной аэростатической опоры 2 проходящей через центр эллипса в упомянутом сечении вала 1. Для выполнения этих действий выполняют п.2.1, п.2.2, п.2.3, п.2.4 для датчиков 3 величин зазоров компенсатора 20 радиального смещения, установленных по осям базовой системы координат XВO В YВ и X1В O1В Y1В в сечении по В - В опоры 2 и получают координаты XiВ, YiВ несмещенного положения оси вращения вала 1 в плоскости установки датчиков 3 величин зазоров компенсатора 20 радиального смещения (в сечении по В - В опоры 2). 3. Вал 1 радиальной аэростатической опоры 2 последовательно устанавливают на углы поворота j1 = 0, j 2 = Dj2 , j3 = 2 × Dj 2, j 4 = 3 × Dj2 , ..., jj = j × Dj2, ..., jj = 360° - Dj 2. На каждом угле поворота jj в плоскостях установки датчиков 3 величин зазоров компенсаторов 19 и 20 радиального смещения смещают ось вращения вала 1 устанавливают в несмещенное положение (в точки с координатами XiА, YiА и XiВ , Yi В), измеряют и запоминают в качестве базовых величин зазоров Z1А(jj), Z 3А(jj), Z5А(jj), Z 7А(jj), Z 1В(jj), Z 3В(jj), Z 5В(jj), Z 7В(jj) под датчиками 3 величин зазоров C1, C3, C 5, C7 , установленных по осям базовых систем координат XА OА YА и XВ OВ YВ (фиг.6) и соответствующи х несмещенному положению оси вращения вала 1 на этих углах поворота. 3.1. Для выполнения этих действий с пульта цифрового блока 22 выполняют пуск подпрограммы "Индикация координат оси вращения вала". В соответствии с алгоритмом работы этой подпрограммы цифровой блок 22 с заданной частотой опрашивает измерители 21 величин зазоров C1, C2, C3, C4, C5, C6 , C7, C8 (фиг.6), установленных по осям систем координат XАOА YА , X1 АO 1А Y1 А и по осям систем координат XВ OВ YВ , X1 ВO 1В Y1 В. По показаниям измерителя 23 угла поворота вал 1 устанавливают на угол поворота j1 =0. Цифровой блок 22 преобразует сигналы измерителей 21 в цифровой двоичный код, запоминает в памяти величины зазоров Z1А(j1 = 0), Z2А(j 1 = 0), Z3А(j 1 = 0), Z4А(j 1 = 0), Z5А(j1 = 0), Z6А(j 1 = 0), Z7 А(j1 = 0), Z 8А(j 1 = 0) под датчиками 3 величин зазоров, установленных по осям систем координат XАOА YА и X1А O1А Y1А в сечении по А - А опоры 2, и величины зазоров Z1В(j1 = 0), Z2В(j 1 = 0), Z3В(j 1 = 0), Z4В(j 1 = 0), Z5В(j 1 = 0), Z6В(j1 = 0), Z7В(j 1 = 0), Z8В(j1 = 0) под датчиками 3 величин зазоров, установленных по осям базовой системы координат XВOВ YВ и X1В O1В Y1В в сечении по В - В радиальной аэростатической опоры 2. Далее алгоритм данной подпрограммы выполняет действия, приведенные в п.2.2 по вычислению координат оси вращения вала 1, и вычисляет координаты Выполняя пуски подпрограмм "Установка вала 1", "Установка вала 2", "Установка вала 3", "Установка вала 4" и, подбирая сигналы управления Uупр.1(j1 = 0), U упр.2(j1 = 0), U упр.3(j1 = 0), Uупр.4(j1 = 0) добиваются выполнения упомянутых равенств и устанавливают вал 1 на угле j1 = 0 поворота в несмещенное положение. Не изменяя положения вала 1 с пульта цифрового блока 22. выполняют пуск подпрограммы "Формирование массива опорных зазоров". В соответствии с алгоритмом работы этой подпрограммы цифровой блок 22 выполняет опрос измерителей 21 величин зазоров по сигналам датчиков 3 величин зазоров C1, C3, C5, C7 величин зазоров, установленных по осям базовых систем координат XА OА YА и XВ OВ YВ (фи г.9). Двоичные коды величин опорных зазоров засылаются в первые восемь ячеек массива опорных зазоров, соответствующи х несмещенному положению вала 1 на угле поворота j1 = 0. 3.2 Действия п.3.1 последовательно выполняют на углах j2 = Dj1 , j3 = 2 × Dj 1, j4 = 3 × Dj1, ..., jZ = 360° - Dj 1 поворота вала 1. В результате выполнения п.3 в памяти цифрового блока 22 формируют массив величин опорных зазоров для заданных дискретных значений угла поворота вала 1: оси вращения вала 1 на угле j1 = 0 поворота в сечениях по А - А и В - В опоры 2 и отображает их на экране дисплея. Сравнивают координаты оси вращения вала 1 на угле поворота j1 = 0 с координатами несмещенного положения XiА, YiА и XiВ, YiВ соотве тственно. Если равенства не выполняются, выключатели 28 "вкл. - выкл." устанавливают в положение "вкл." и подключают дифференциальные усилители 27 сигналов управления к группам 11, 12, 13, 14, 15, 16, 17, 18 регуляторов давления, а выключатели 37 "работа - выкл." устанавливают в положение "выкл." и отключают дифференциальные усилители 29, 30, 31, 32, 33, 34, 35, 36 сигналов рассогласования от групп 11, 12, 13, 14, 15, 16, 17, 18 регуляторов давления. 4. Работа устройства в режиме компенсации радиальных нагрузок. Для перевода устройства в режим компенсации радиальных нагрузок выключатели 28 "вкл. - выкл." устанавливают в положение "выкл," и отключают группы 11, 12, 13, 14 регуляторов давления компенсатора 19 радиального смещения оси вращения от дифференциальных усилителей 27 сигналов управления, а также отключают группы 15, 16, 17, 18 регуляторов давления компенсатора 20 радиального смещения оси вращения от этих дифференциальных усилителей. Выключатели 37 "Работа выкл." устанавливают в положение "Работа" и подключают группы 11, 12, 13, 14 регуляторов давления компенсатора 19 радиального смещения к дифференциальным усилителям 29, 30, 31, 32 сигналов рассогласования, а группы 15, 16, 17, 18 регуляторов давления компенсатора 20 радиального смещения к дифференциальным усилителям 33, 34, 35, 36 сигналов рассогласования. С пульта цифрового блока 22 выполняют пуск подпрограммы "Компенсация радиальных нагрузок". В соответствии с алгоритмом работы этой подпрограммы в момент времени ее включения величины опорных зазоров для угла поворота вала 1 j1 = 0 считываются из массива опорных зазоров цифрового блока 22. По переднему фронту первой метки нулевого угла поворота вала 1, поступающей с измерителя 23 в цифровой блок 22 после пуске подпрограммы "Компенсаций радиальных нагрузок", величины опорных зазоров преобразуются в соответствующие этим кодам напряжения и поступают на первые входы дифференциальных усилителей 29, 30, 31, 32, 33, 34, 35, 36 сигналов рассогласования соответственно, а из памяти цифрового блока 22 считываются коды опорных зазоров для второй угловой дискреты компенсации радиальных нагрузок. На вторые входы ди фференциальных усилителей сигналов рассогласования 29, 30, 31, 32 (фиг.6) поступают сигналы измерителей 21 величин зазоров по сигналам датчиков 3 величин зазоров C1, C3, C5, C7 компенсатора 19 радиального смещения оси вращения вала радиальной аэростатической опоры 2. На вторые входы ди фференциальных усилителей 33, 34, 35, 36 сигналов рассогласования поступают сигналы измерителей 21 величин зазоров по сигналам датчиков 3 величин зазоров C1, C3, C5, C7 компенсатора 20 радиального смещения оси вращения вала 1 радиальной аэростатической опоры 2. Сигнал рассогласования поступает: с дифференциального усилителя 29 - на группу 12, 30 - на группу 14, 31 - на группу 11, 32 - на группу 13 регуляторов давления компенсатора 19 радиального смещения, с дифференциального усилителя 33 - на группу 16, 34 - на группу 18, 35 на группу 15, 36 - на группу 17 регуляторов давления компенсатора 20 радиального смещения. При отклонении текущи х величин зазоров Z1А(t), Z 3А(t), Z 5А(t), Z7 А(t), Z1 В(t), Z3В(t), Z5В(t), Z 7В(t) от соответствующих величин опорных зазоров при повороте вала 1 в пределах угла 0 £ j < Dj1 на дифференциальных усилителях 29, 30, 31, 32, 33, 34, 35, 36 возникают сигналы рассогласования, которые поступают на группы 11, 12, 13, 14 и группы 15, 16, 17, 18 регуляторов давления компенсаторов 19 и 20 радиального смещения и обеспечивают в пределах угла поворота 0 £ j < Dj1 выполнение равенств: При поступлении в цифровой блок 22 с измерителя 23 угла поворота метки угла поворота вала 1 на угол j2 , по ее переднему фронту коды величин опорных зазоров преобразуются в напряжения и поступают на входы дифференциальных усилителей 29, 30, 31, 32, 33, 34, 35, 36 сигналов рассогласования, а из массива опорных зазоров считываются коды опорных зазоров для компенсации радиальных нагрузок в пределах угла поворота вала 1 j2 £ j < j3. Описанный процесс компенсации радиальных нагрузок повторяется на каждой дискрете компенсации Dj1, например, Dj1 = 1°. При поступлении очередной метки нулевого угла поворота вала 1 работа устройства компенсации радиальных нагрузок на вал радиальной аэростатической опоры осуществляется так, как и при поступлении первой метки нулевого угла поворота.
ДивитисяДодаткова інформація
Автори англійськоюShepelev Anatolii Oleksandrovych, Zinenko Volodymyr Mykolaiovych
Автори російськоюШепелев Анатолий Александрович, Зиненко Владимир Николаевич
МПК / Мітки
МПК: B23B 19/00, F16C 32/06
Мітки: опори, радіальної, компенсації, аеростатичної, вал, пристрій, радіальних, навантажень
Код посилання
<a href="https://ua.patents.su/15-25727-pristrijj-kompensaci-radialnikh-navantazhen-na-val-radialno-aerostatichno-opori.html" target="_blank" rel="follow" title="База патентів України">Пристрій компенсації радіальних навантажень на вал радіальної аеростатичної опори</a>
Пристрій стабілізації положення рухомого елемента плоскої аеростатичної опори
Номер патенту: 17152
Опубліковано: 18.03.1997
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
МПК: F16C 32/06
Мітки: пристрій, положення, стабілізації, елемента, плоскої, аеростатичної, рухомого, опори
Формула / Реферат:
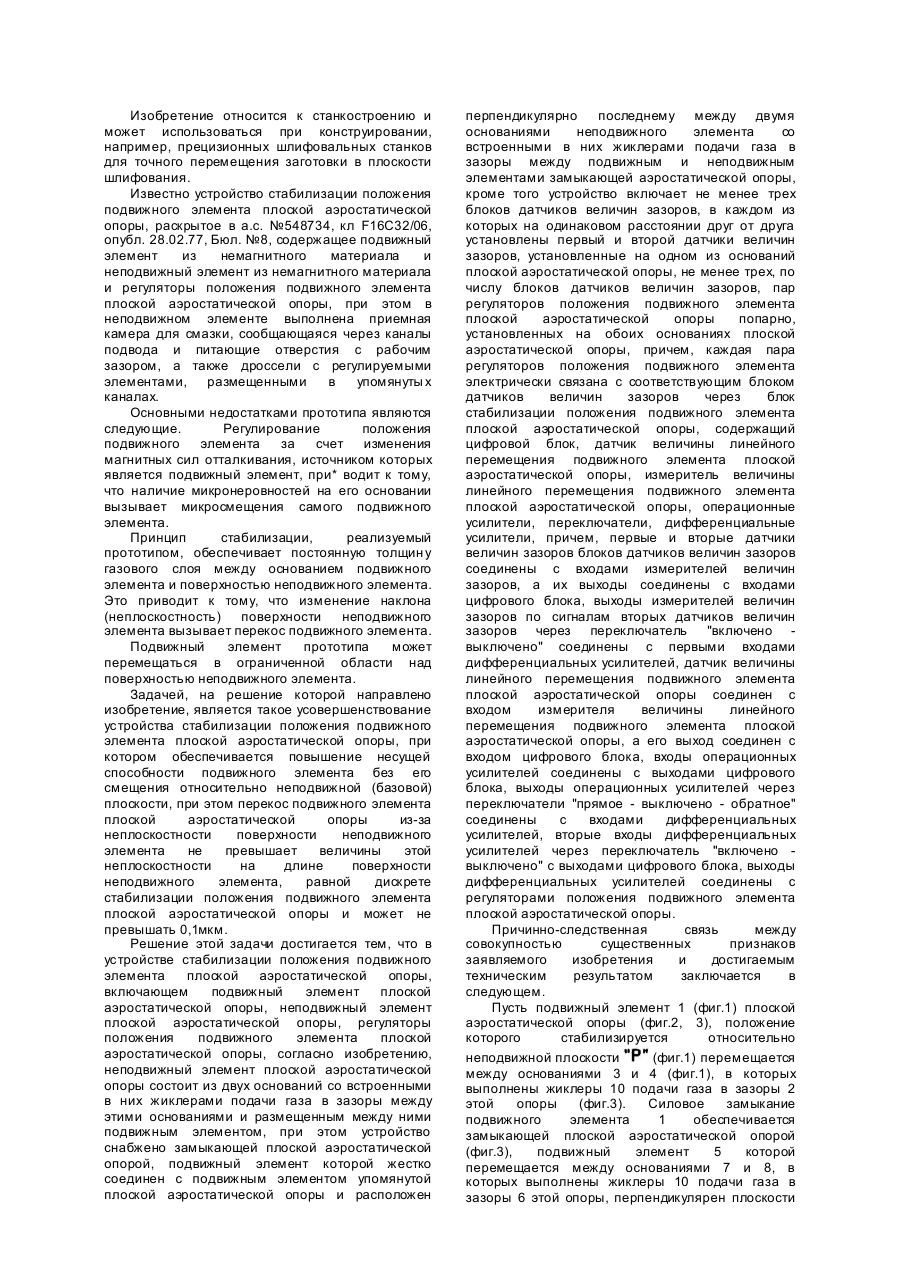
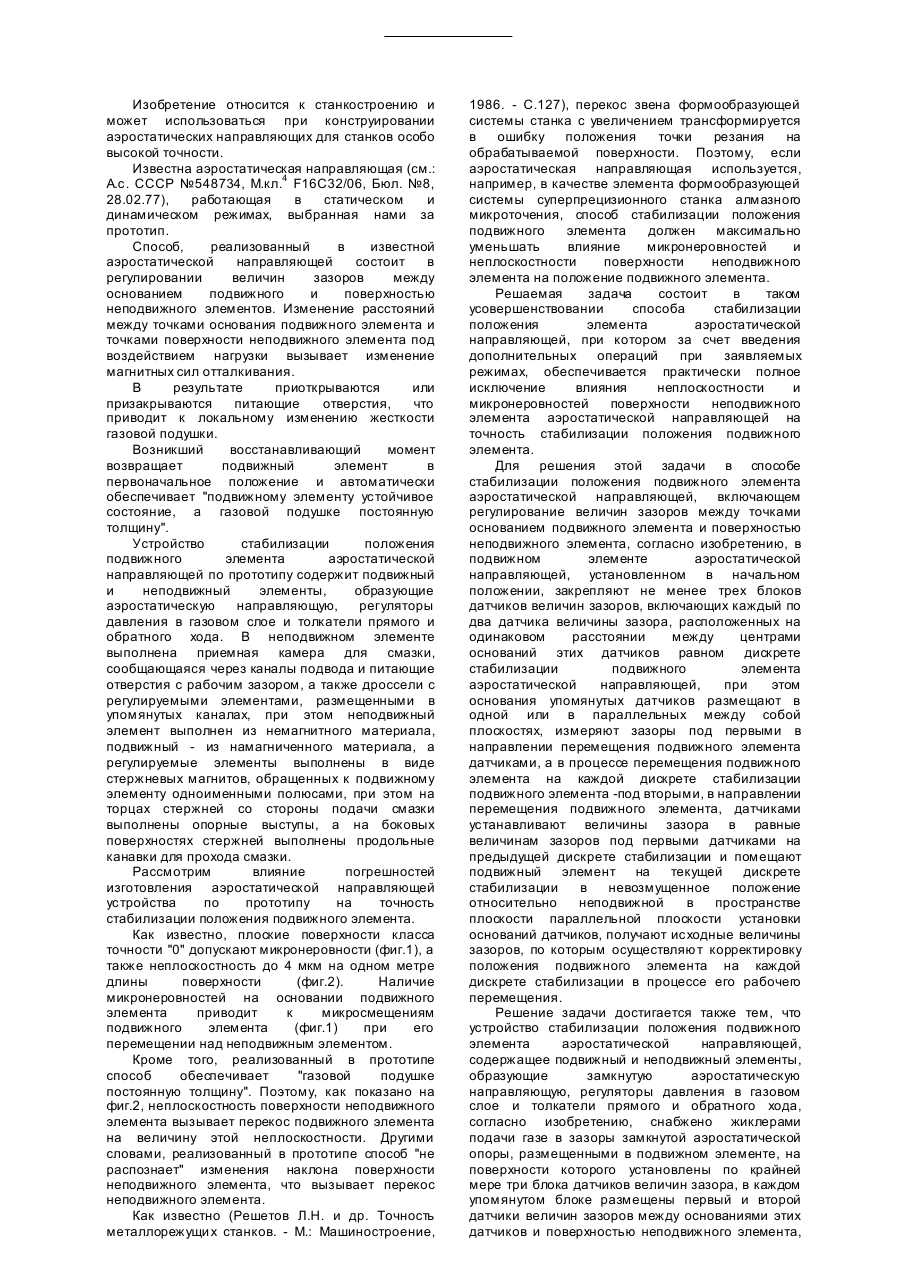
Устройство стабилизации положения подвижного элемента плоской аэростатической опоры, включающей подвижный и неподвижный элементы плоской аэростатической опоры и регуляторы положения подвижного элемента плоской аэростатической опоры, отличающееся тем, что неподвижный элемент плоской аэростатической опоры состоит из двух оснований со встроенными в них жиклерами подачи газа в зазоре между этими основаниями и размещенным между ними подвиж-ным...
Спосіб стабілізації положення рухомого елемента аеростатичної напрямної та пристрій для його здійснення
Номер патенту: 14905
Опубліковано: 04.03.1997
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
МПК: F16C 32/06
Мітки: спосіб, положення, здійснення, напрямної, елемента, пристрій, стабілізації, аеростатичної, рухомого
Формула / Реферат:
1. Способ стабилизации положения подвижного элемента аэростатической, направляющей, включающий регулирование величин зазоров между основанием подвижного элемента и поверхностью неподвижного элемента, отличающийся тем, что в подвижном элементе аэростатической направляющей, установленном в начальном положении, закрепляют не менее трех блоков датчиков величин зазоров, включающих каждый по два датчика величины зазора, расположенных на одинаковом...
Пристрій для розподілу газу та утримання каталізатора в каталітичних шарах радіальних або аксіально-радіальних реакторів
Номер патенту: 8084
Опубліковано: 26.12.1995
Автори: Джорджіо Пагані, Умберто Зарді
МПК: B01J 8/02, C01C 1/04, B01J 8/00, B01J 8/04
Мітки: газу, радіальних, шарах, утримання, реакторів, каталізатора, пристрій, аксіально-радіальних, розподілу, каталітичних
Формула / Реферат:
(57) 1. Устройство для распределения газа и удержания катализатора в каталитических слоях радиальных или аксиально-радиальных реакторов, включающее опорный элемент и сетку, отличающееся тем, что опора выполнена в виде выпуклых участков, непроницаемых для газа, выполняющих роль механической опоры для сетки, и проницаемых для газа перфорированных участков, обеспечивающих необходимое падение давления, которые расположены между выпуклыми...
Спосіб виміру радиального зміщення осі обертових елементів станків
Номер патенту: 25726
Опубліковано: 30.10.1998
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: B23B 25/00
Мітки: осі, станків, обертових, радіального, елементів, зміщення, виміру, спосіб
Формула / Реферат:
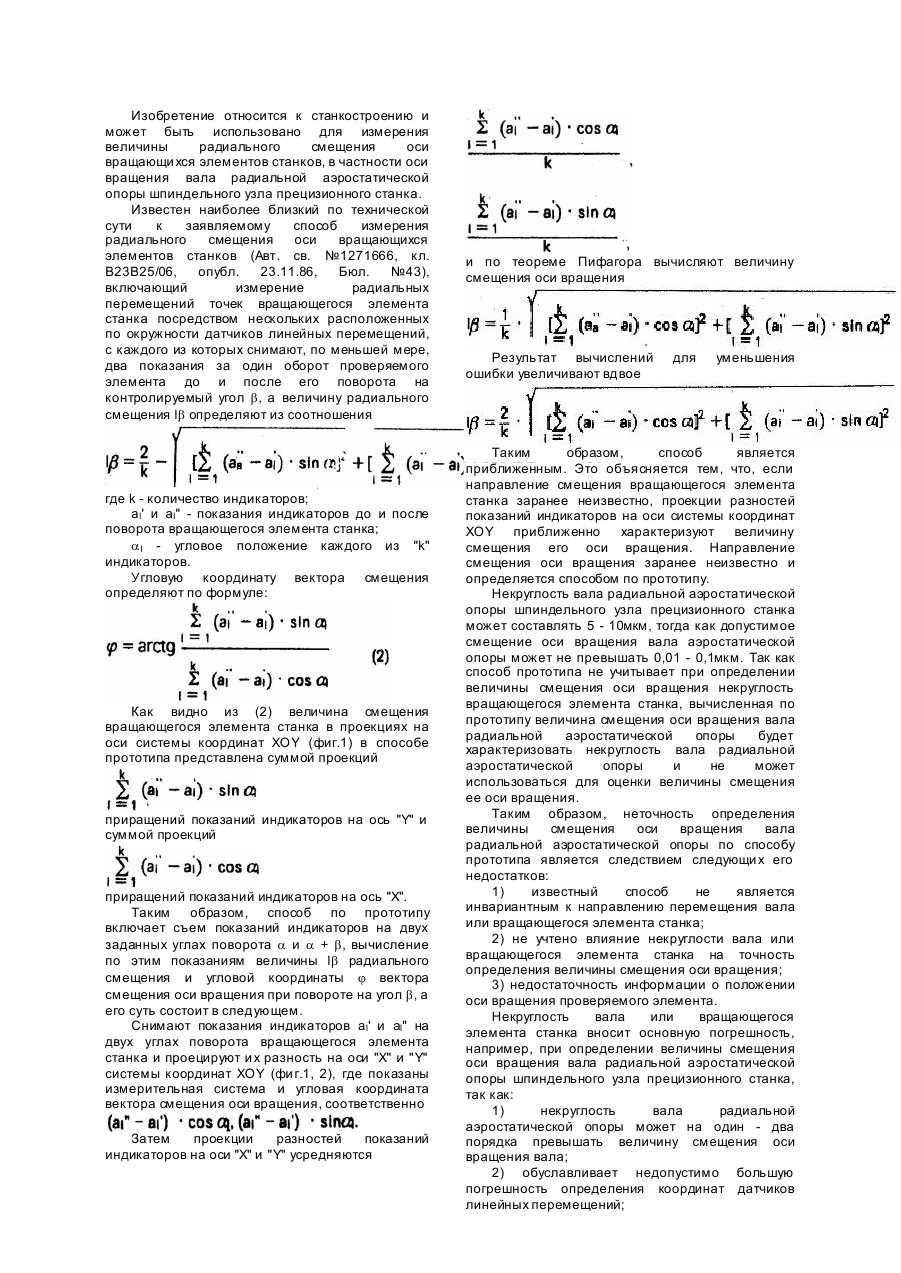
1. Способ измерения радиального смещения оси вращающихся элементов станков, включающий измерение радиальных перемещений точек вращающегося элемента станка посредством нескольких смещенных в окружном направлении датчиков линейных перемещений, с каждого из которых снимают, по меньшей мере, два показания за один оборот проверяемого элемента до и после поворота на проверяемый угол, отличающийся тем, что предварительно датчики линейных перемещений...
Пристрій для змащування та охолодження підшипника опори ротора газотурбінного двигуна
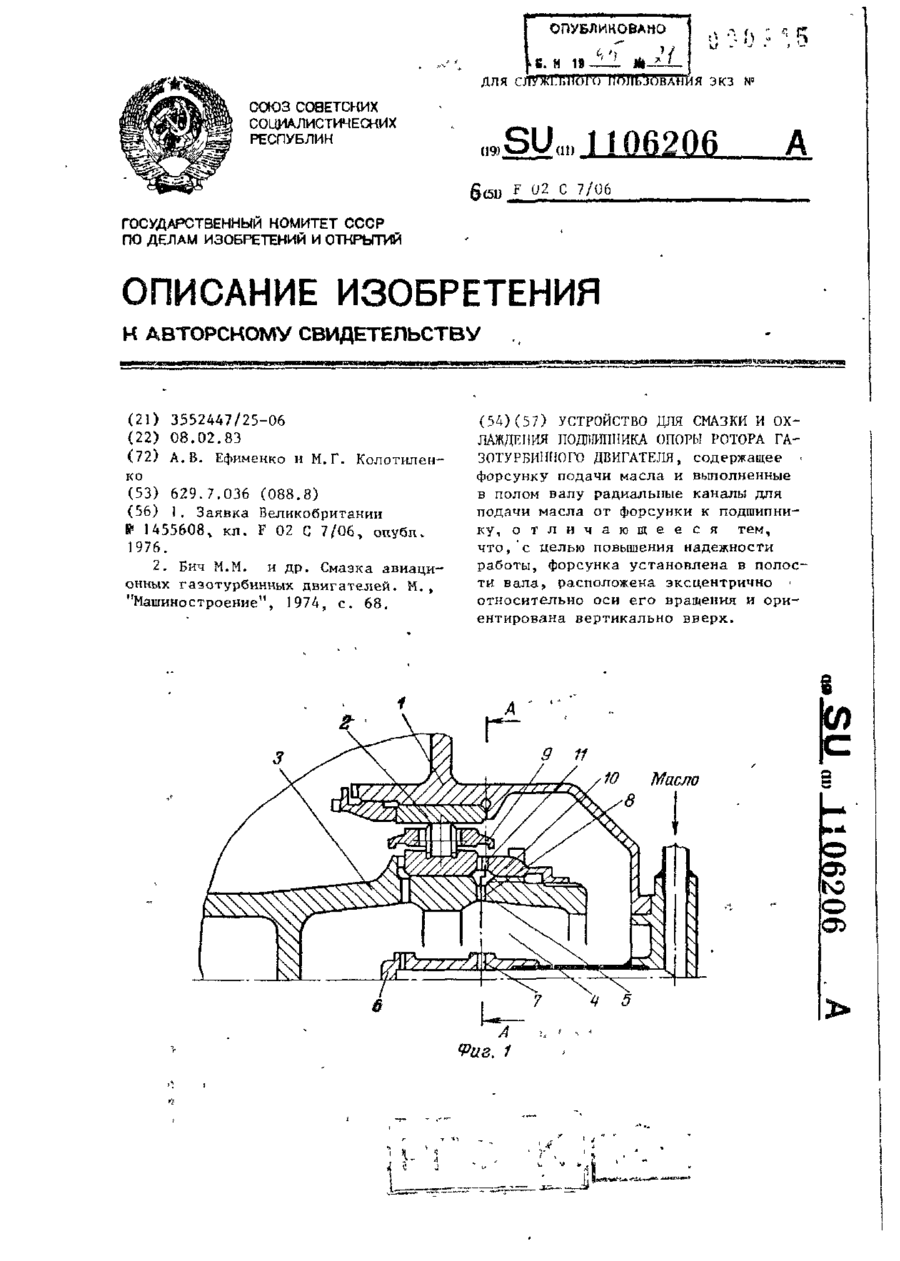
Номер патенту: 16647
Опубліковано: 29.08.1997
Автори: Єфименко Анатолій Васильович, Колотиленко Михайло Георгійович
МПК: F02C 7/06
Мітки: змащування, охолодження, підшипника, ротора, двигуна, опори, газотурбінного, пристрій
Формула / Реферат:
Устройство для смазки и охлаждения подшипника опоры ротора газотурбинного двигателя, содержащее форсунку подачи масла и выполненные в полом валу радиальные каналы для подачи масла от форсунки к подшипнику, отличающееся тем, что, с целью повышения надежности работы, форсунка установлена в полости вала, расположена эксцентрично относительно оси его вращения и ориентирована вертикально вверх.
Попередній патент: Спосіб виміру радиального зміщення осі обертових елементів станків
Наступний патент: Спосіб одержання сорбенту для очистки меляси
Випадковий патент: Спосіб приготування штучної мінералізованої питної води літнього призначення